A Novel Method for Breath Detection via Stepped-Frequency Continuous Wave Ultra-Wideband (SFCW UWB) Radars Based on Operational Bandwidth Segmentation


Abstract
:1. Introduction
2. Basic Theoretical Model
2.1. Model Description and Analysis
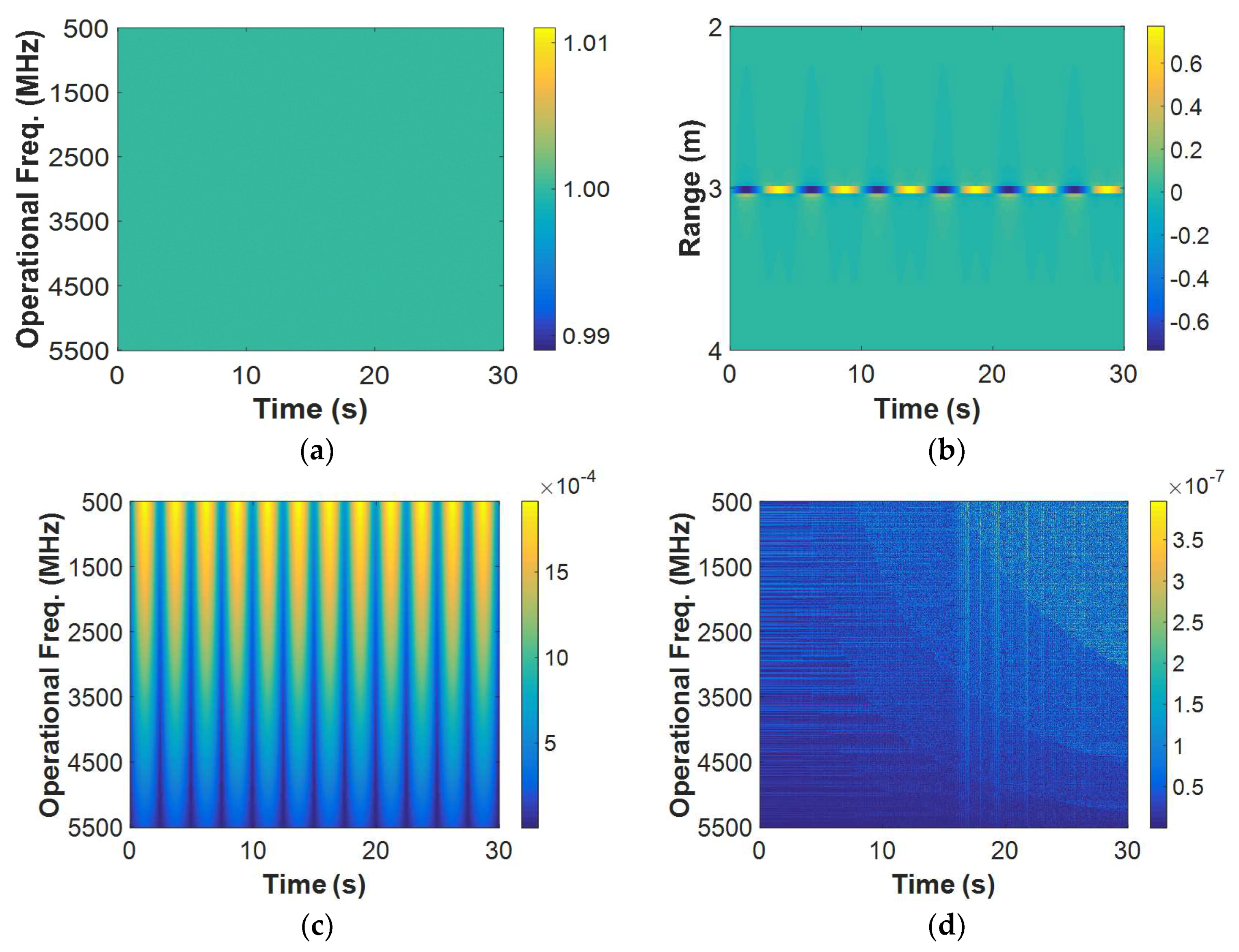
2.2. Model Simulation and Results
3. Experiment Setup and Method
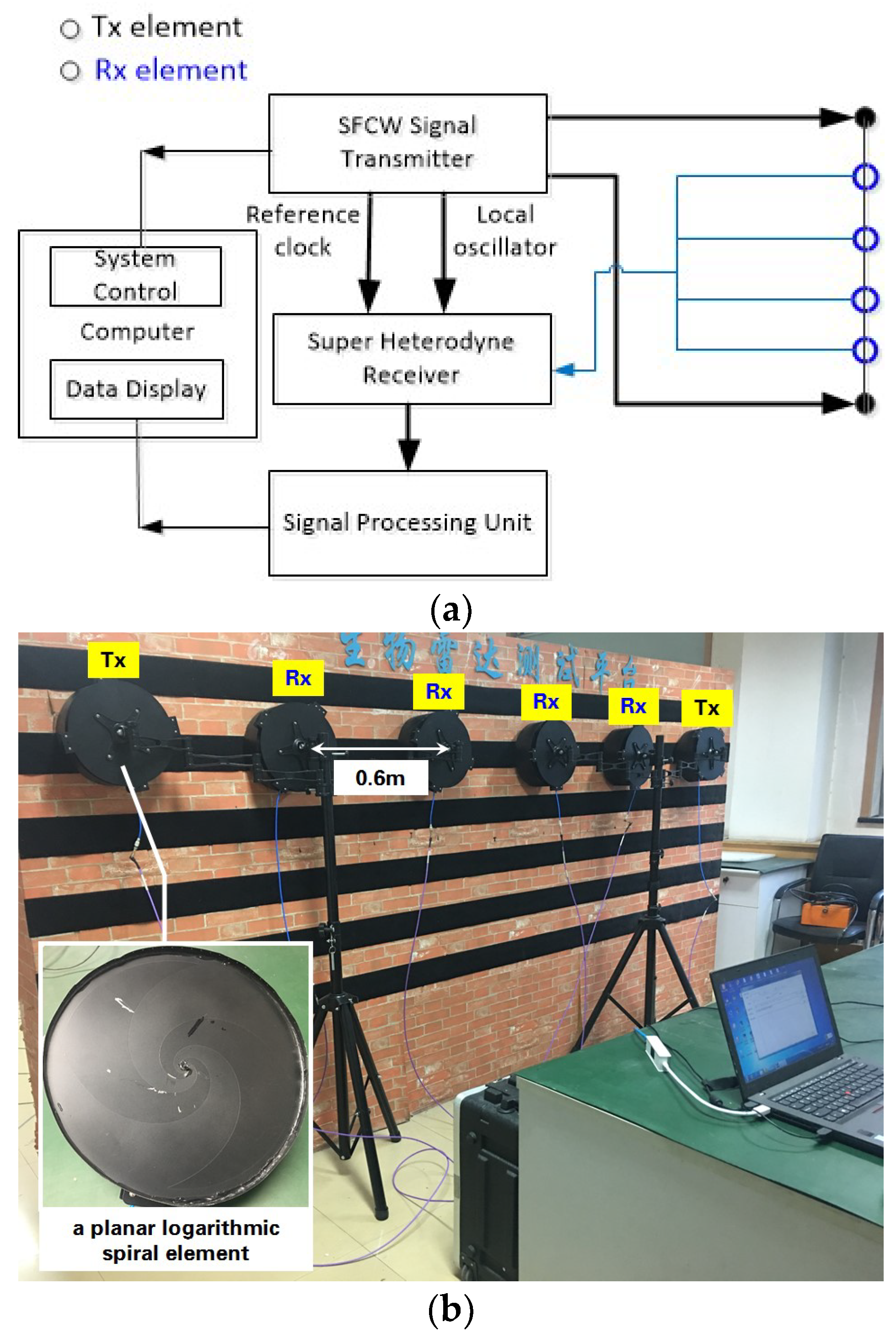
3.1. SFCW UWB Radar
3.2. Breath Enhancement Algorithm
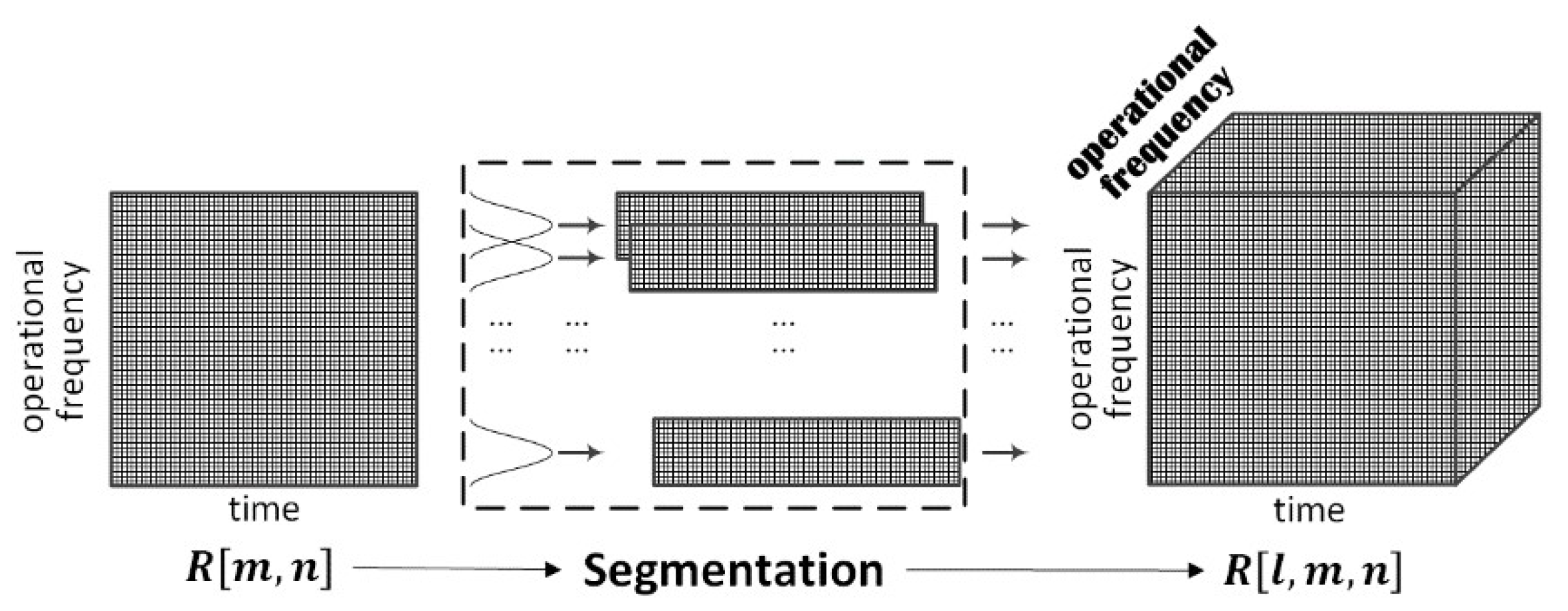
3.2.1. Operational Bandwidth Segmentation
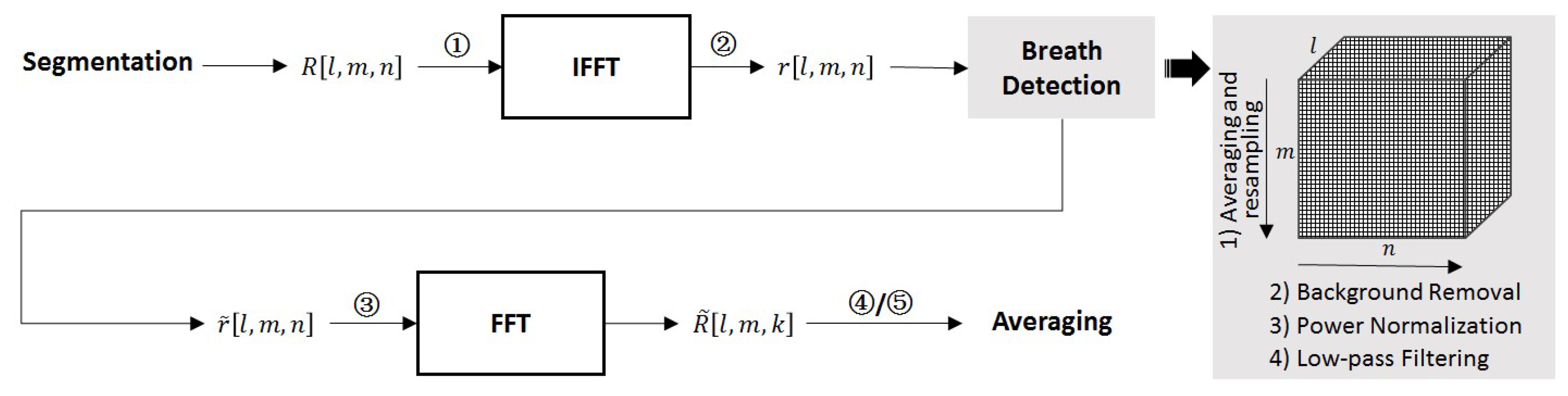
3.2.2. Basic Processing Flow
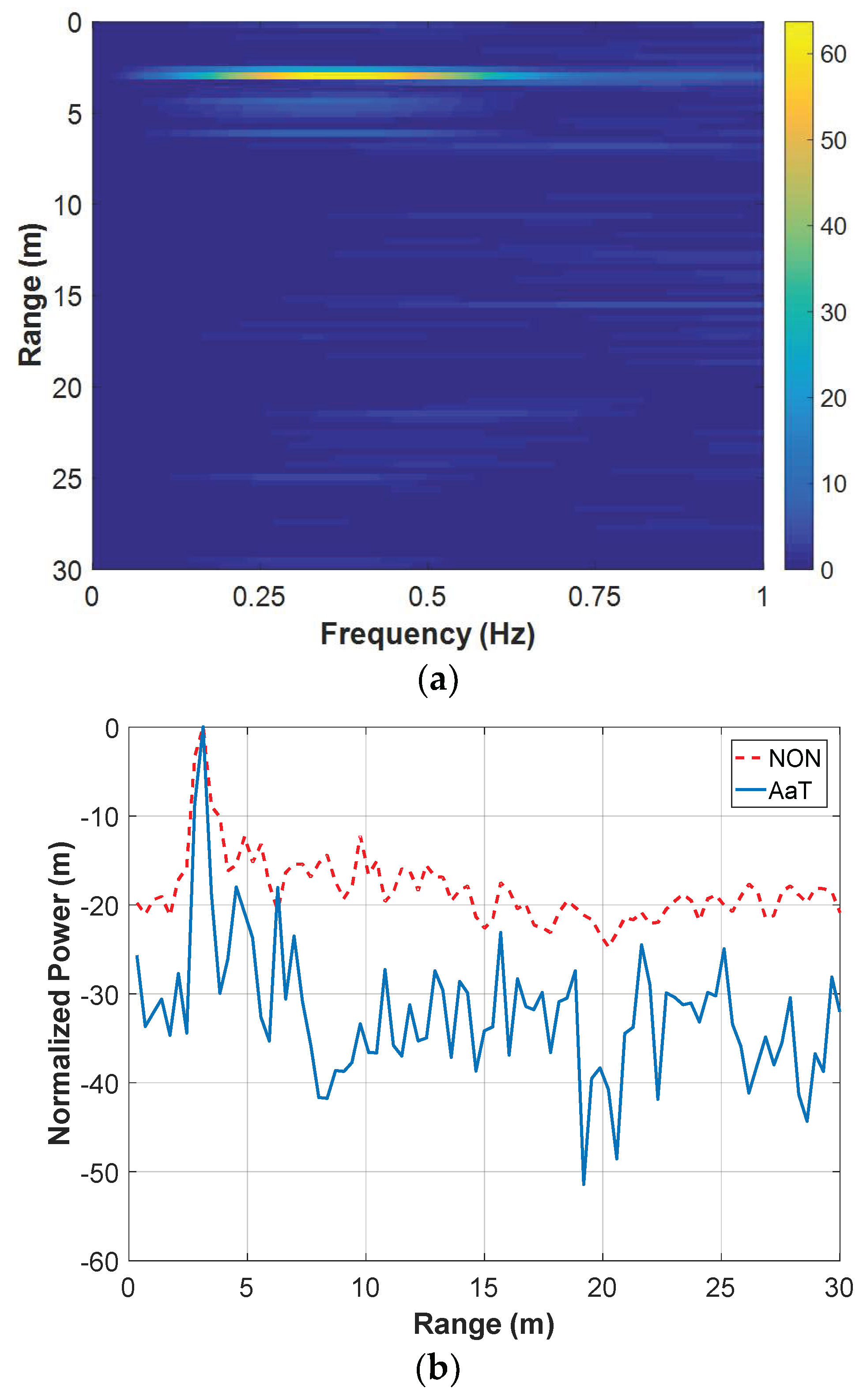
3.2.3. Averaging along the Operational Frequency
4. Experimental Results
4.1. Algorithm Performance Analysis
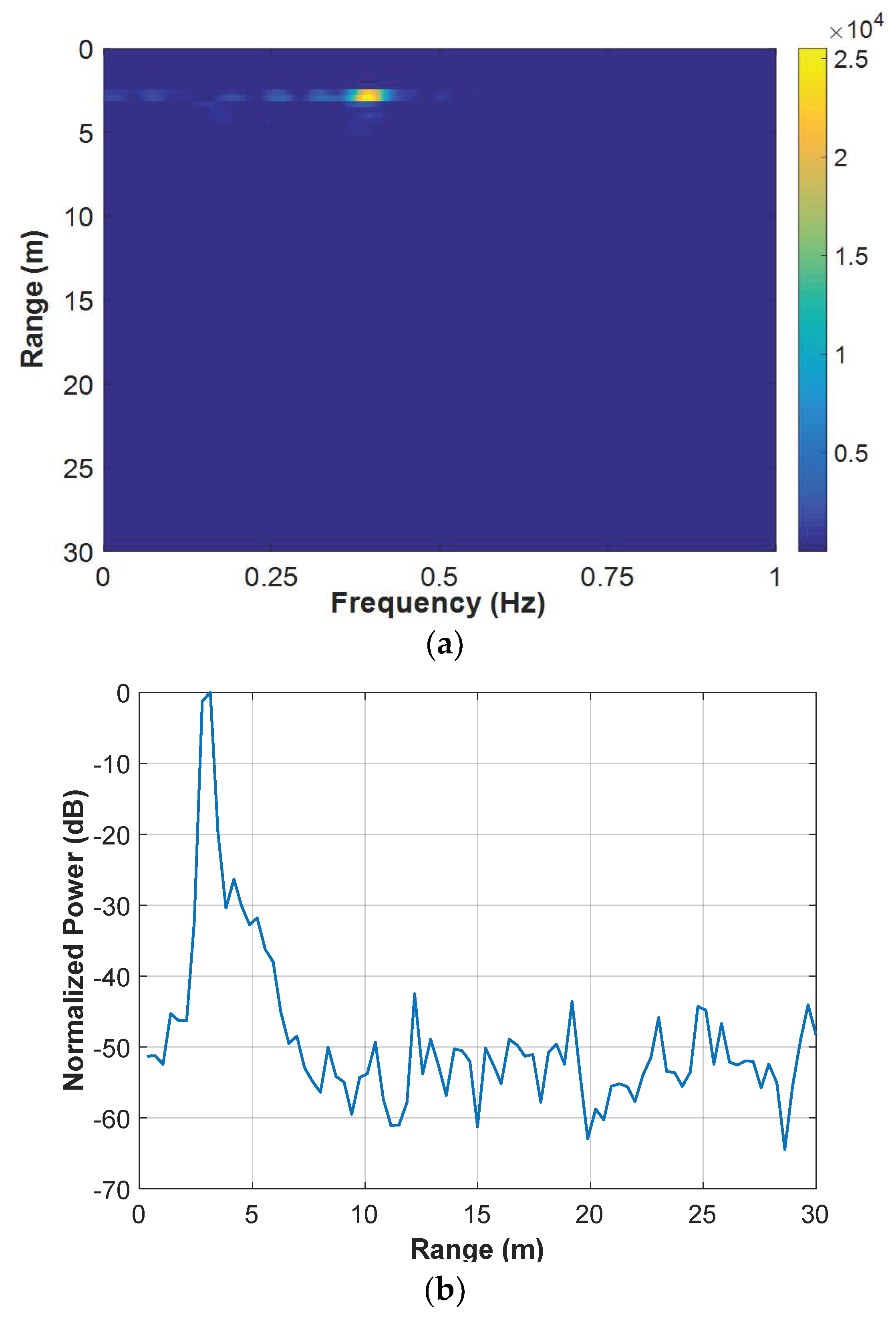
4.1.1. Example Results
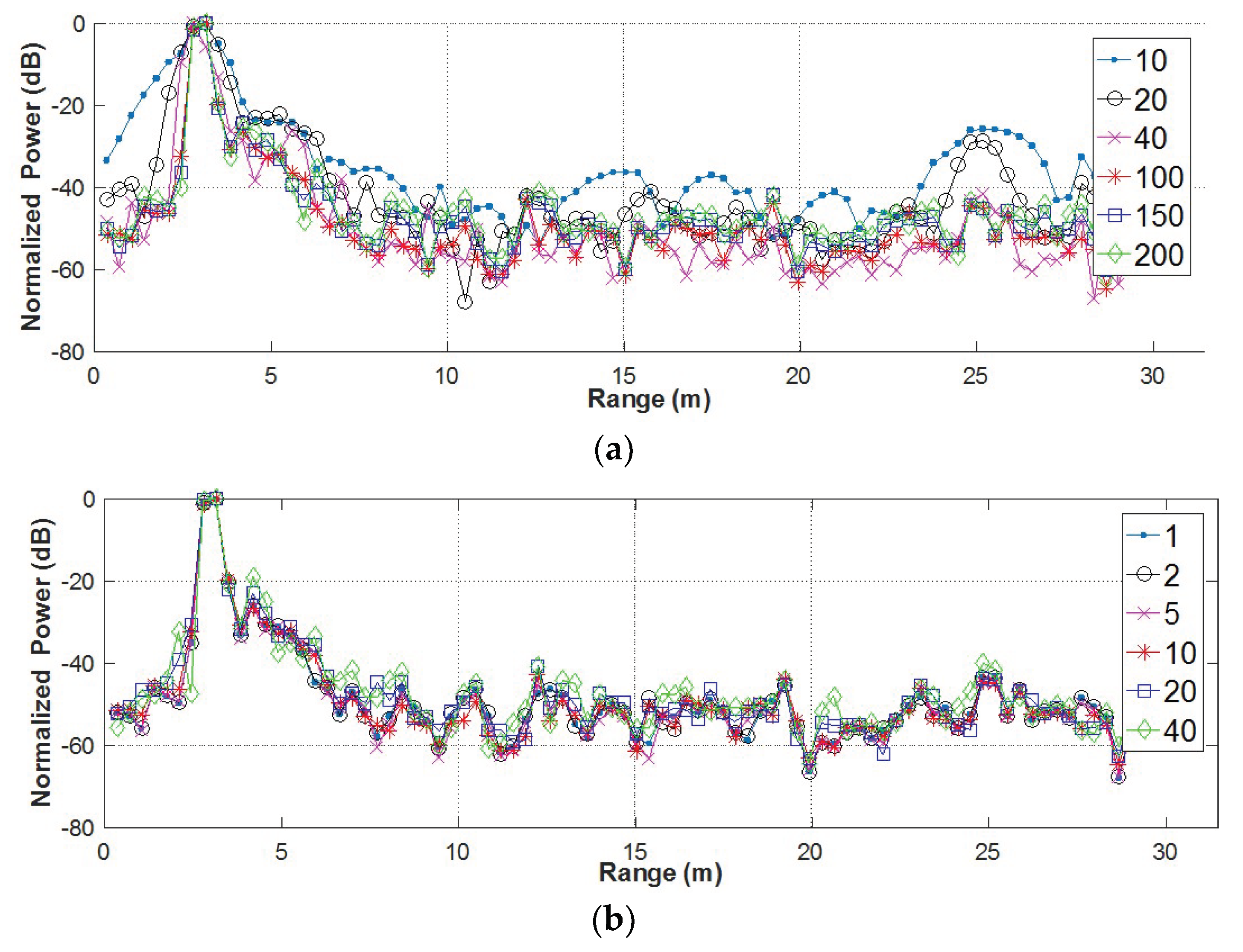
4.1.2. Effects of the Segmentation Parameters
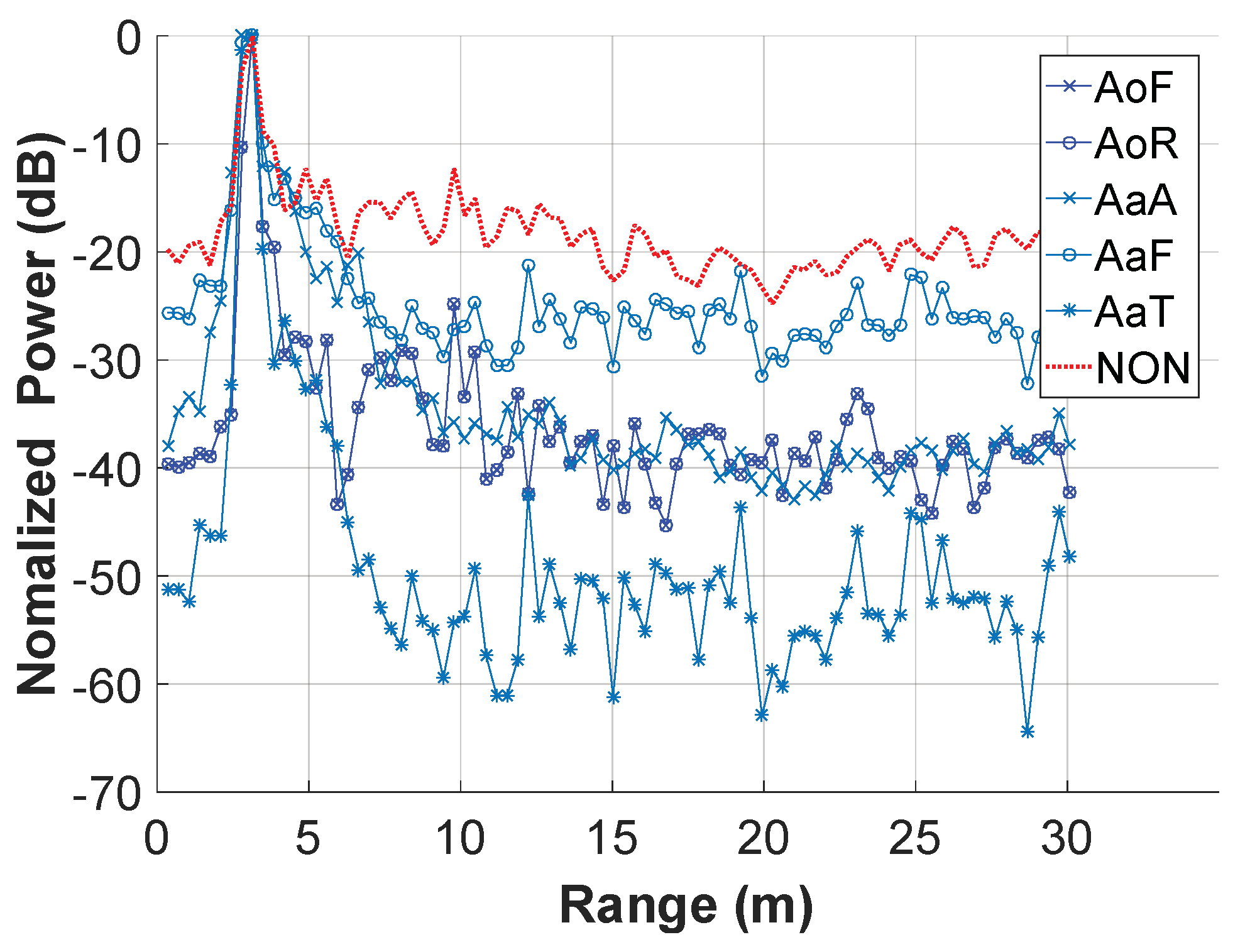
4.1.3. Effect of the Different Averaging Cases
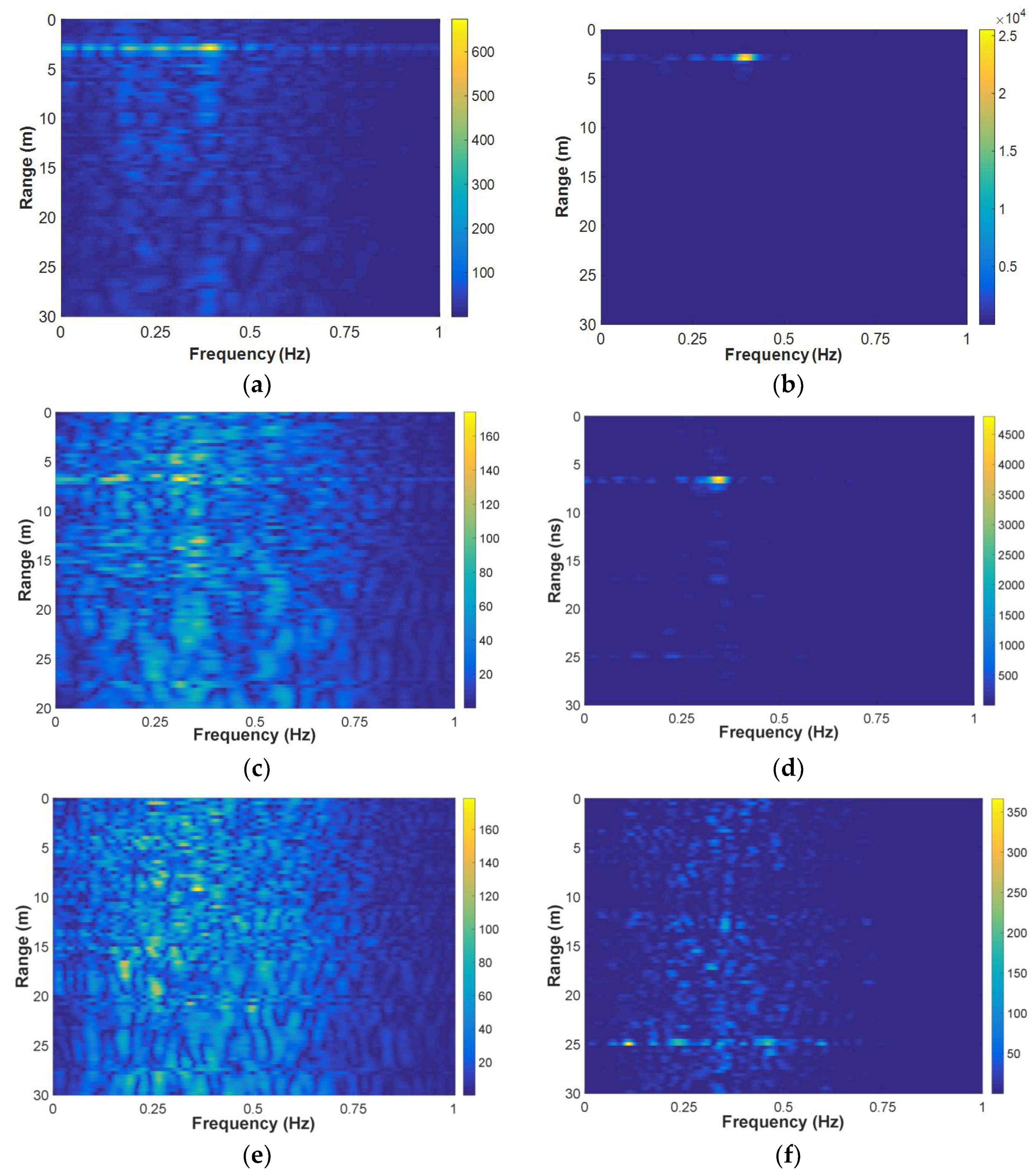
4.2. Breath Enhancement Results
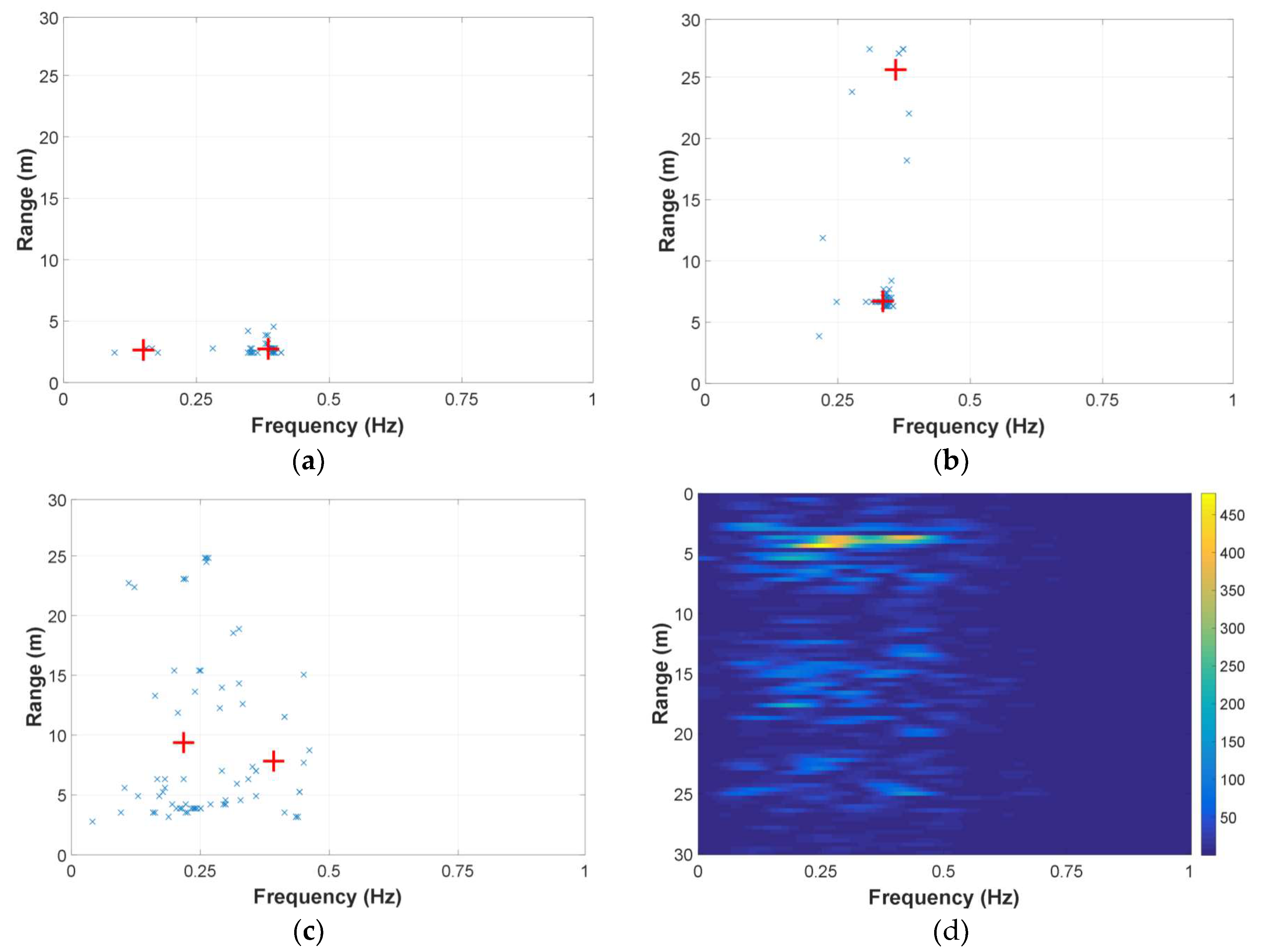
4.3. Target Identification Results
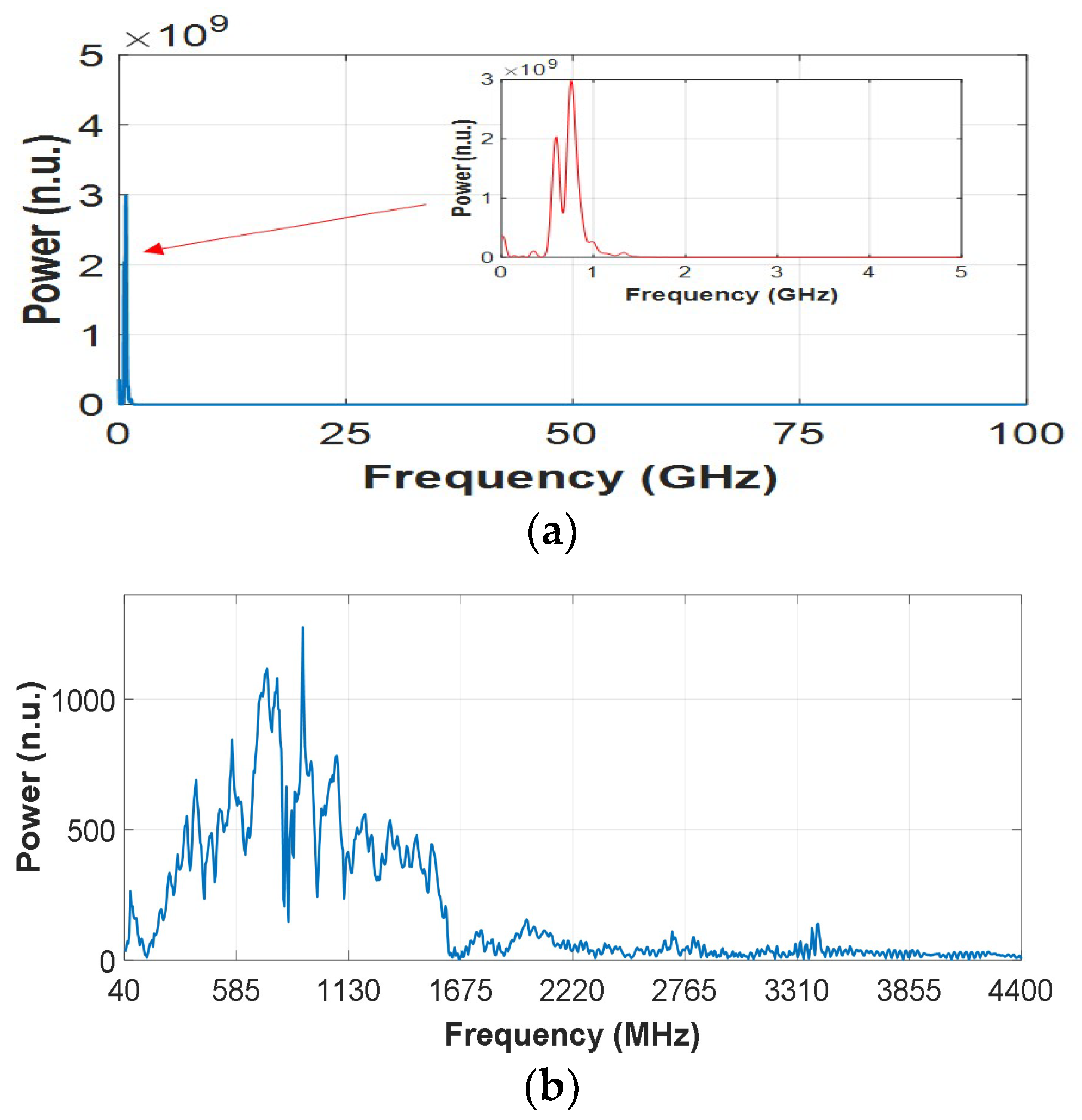
4.4. IR UWB Radar Results
5. Discussion and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Chen, K.M.; Huang, Y.; Zhang, J.P.; Norman, A. Microwave Life-Detection Systems for Searching Human Subjects under Earthquake Rubble or behind Barrier. IEEE Trans. Biomed. Eng. 2000, 47, 105–114. [Google Scholar] [CrossRef] [PubMed]
- Staderini, E.M. UWB Radar in Medicine. IEEE Trans. Aerosp. Electron. Syst. 2002, 17, 13–18. [Google Scholar] [CrossRef]
- Ahmad, F.; Frazer, G.J.; Kassam, S.A.; Amin, M.G. Design and Implementation of Near-Field, Wideband Synthetic Aperture Beamformers. IEEE Trans. Aerosp. Electron. Syst. 2004, 40, 206–220. [Google Scholar] [CrossRef]
- Li, C.Z.; Xiao, Y.M.; Lin, J.S. Experiment and Spectral Analysis of a Low-Power Ka-Band Heartbeat Detector Measuring from Four Sides of a Human Body. IEEE Trans. Microw. Theory Tech. 2006, 54, 4464–4471. [Google Scholar] [CrossRef]
- Lin, S.K. Microwave and Millimeter-Wave Remote Sensing for Security Applications. Remote Sens. 2013, 5, 367–373. [Google Scholar] [CrossRef] [Green Version]
- Baldi, M.; Cerri, G.; Chiaraluce, F.; Eusebi, L.; Russo, P. Non-invasive UWB Sensing of Astronauts’ Breathing Activity. Sensors 2014, 15, 565–591. [Google Scholar] [CrossRef] [PubMed]
- Gennarelli, G.; Ludeno, G.; Soldovieri, F. Real-Time Through-Wall Situation Awareness Using a Microwave Doppler Radar Sensor. Remote Sens. 2016, 8, 621. [Google Scholar] [CrossRef]
- Hong, H.; Zhao, H.; Peng, Z.Y.; Li, H.; Gu, C.; Li, C.Z.; Zhu, X.H. Time-Varying Vocal Folds Vibration Detection Using a 24 GHz Portable Auditory Radar. Sensors 2016, 16, 1181. [Google Scholar] [CrossRef] [PubMed]
- Wu, S.; Yao, S.; Liu, W.; Tan, K.; Xia, Z.; Meng, S.; Chen, J.; Fang, G.; Yin, H. Study on a Novel UWB Linear Array Human Respiration Model and Detection Method. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 125–140. [Google Scholar] [CrossRef]
- Buxi, D.; Redouté, J.M.; Yuce, M.R. Blood Pressure Estimation Using Pulse Transit Time from Bioimpedance and Continuous Wave Radar. IEEE Trans. Biomed. Eng. 2017, 64, 917–927. [Google Scholar] [CrossRef] [PubMed]
- Li, C.Z.; Peng, Z.Y.; Huang, T.Y.; Fan, T.L.; Wang, F.K.; Horng, T.S.; Muñoz-Ferreras, J.M.; Gómez-García, R.; Ran, L.X.; Lin, J.S. A Review on Recent Progress of Portable Short-Range Noncontact Microwave Radar Systems. IEEE Trans. Microw. Theory Tech. 2017, 65, 1692–1706. [Google Scholar] [CrossRef]
- Venkatesh, S.; Anderson, C.R.; Rivera, N.V.; Buehrer, R.M. Implementation and analysis of respiration-rate estimation using impulse-based UWB. In Proceedings of the MILCOM 2005—2005 IEEE Military Communications Conference, Atlantic City, NJ, USA, 17–20 October 2005. [Google Scholar]
- Xu, Y.Y.; Wu, S.Y.; Chen, C.; Chen, J.; Fang, G.Y. A novel method for automatic detection of trapped victims by ultrawideband radar. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3132–3142. [Google Scholar] [CrossRef]
- Lv, H.; Li, W.Z.; Li, Z.; Zhang, Y.; Jiao, T.; Xue, H.J.; Liu, M.; Jing, X.J.; Wang, J.Q. Characterization and Identification of IR-UWB Respiratory-Motion Response of Trapped Victims. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7195–7204. [Google Scholar] [CrossRef]
- Li, J.; Liu, L.B.; Zeng, Z.F.; Liu, F.S. Advanced signal processing for vital sign extraction with applications in UWB radar detection of trapped victims in complex environments. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 783–791. [Google Scholar]
- Lazaro, A.; Girbau, D.; Villarino, R. Analysis of Vital Signs Monitoring Using an Ir-Uwb Radar. Prog. Electromagn. Res. 2010, 100, 265–284. [Google Scholar] [CrossRef]
- Naishadham, K.; Piou, J.E.; Ren, L.; Fathy, A.E. Estimation of Cardiopulmonary Parameters from Ultra Wideband Radar Measurements Using the State Space Method. IEEE Trans. Biomed. Circuits Syst. 2016, 10, 1037–1046. [Google Scholar] [CrossRef] [PubMed]
- Lv, H.; Jiao, T.; Zhang, Y.; An, Q.; Liu, M.; Liang, F.L.; Jing, X.J.; Wang, J.Q. An Adaptive-MSSA-Based Algorithm for Detection of Trapped Victims Using UWB Radar. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1808–1812. [Google Scholar] [CrossRef]
- Nijsure, Y.; Tay, W.P.; Gunawan, E.; Wen, F.; Yang, Z.; Guan, Y.L.; Chua, A.P. An impulse radio ultrawideband system for contactless noninvasive respiratory monitoring. IEEE Trans. Geosci. Remote Sens. 2013, 60, 1509–1517. [Google Scholar] [CrossRef] [PubMed]
- Lv, H.; Qi, F.G.; Zhang, Y.; Jiao, T.; Liang, F.L.; Li, Z.; Wang, J.Q. Improved Detection of Human Respiration Using Data Fusion Based on a Multistatic UWB Radar. Remote Sens. 2016, 8, 773. [Google Scholar] [CrossRef]
- Lazaro, A.; Girbau, D.; Villarino, R. Techniques for clutter suppression in the presence of body movements during the detection of respiratory activity through UWB radars. Sensors 2014, 14, 2595–2618. [Google Scholar] [CrossRef] [PubMed]
- Ren, L.; Wang, H.; Naishadham, K.; Kilic, O.; Fathy, A.E. Phase Based Methods for Heart Rate Detection Using UWB Impulse Doppler Radar. IEEE Trans. Microw. Theory Tech. 2016, 64, 3319–3331. [Google Scholar] [CrossRef]
- Nezirovic, A.; Yarovoy, A.G.; Ligthart, L.P. Signal processing for improved detection of trapped victims using UWB radar. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2005–2014. [Google Scholar] [CrossRef]
- Liu, L.B.; Liu, S.X. Remote Detection of Human Vital Sign with Stepped-Frequency Continuous Wave Radar. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 775–782. [Google Scholar] [CrossRef]
- Liang, F.L.; Qi, F.G.; An, Q.; Lv, H.; Chen, F.M.; Li, Z.; Wang, J.Q. Detection of Multiple Stationary Humans Using UWB MIMO Radar. Sensors 2016, 16, 1922. [Google Scholar] [CrossRef] [PubMed]
- Nahar, S.; Phan, T.; Quiyum, F.; Ren, L.; Fathy, A.E.; Kilic, O. An Electromagnetic Model of Human Vital Signs Detection and Its Experimental Validation, Phase-Based Method. IEEE J. Emerg. Sel. Top. Circuits Syst. 2018, 8, 338–349. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| operational frequency | 40–4400 MHz |
| step size | 5 MHz |
| pulse repeated frequency (PRF) | 113 Hz |
| unambiguous range | 30 m |
| transmitting power | 10 dBm |
| sensitivity of receiver | −90 dBm |
| dynamic range of receiver | 90 dBm |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lv, H.; Jiao, T.; Zhang, Y.; Liang, F.; Qi, F.; Wang, J. A Novel Method for Breath Detection via Stepped-Frequency Continuous Wave Ultra-Wideband (SFCW UWB) Radars Based on Operational Bandwidth Segmentation. Sensors 2018, 18, 3873. https://doi.org/10.3390/s18113873
Lv H, Jiao T, Zhang Y, Liang F, Qi F, Wang J. A Novel Method for Breath Detection via Stepped-Frequency Continuous Wave Ultra-Wideband (SFCW UWB) Radars Based on Operational Bandwidth Segmentation. Sensors. 2018; 18(11):3873. https://doi.org/10.3390/s18113873
Chicago/Turabian StyleLv, Hao, Teng Jiao, Yang Zhang, Fulai Liang, Fugui Qi, and Jianqi Wang. 2018. "A Novel Method for Breath Detection via Stepped-Frequency Continuous Wave Ultra-Wideband (SFCW UWB) Radars Based on Operational Bandwidth Segmentation" Sensors 18, no. 11: 3873. https://doi.org/10.3390/s18113873