1. Introduction
Inverse synthetic aperture radar (ISAR) is an important imaging mode of radar application for detecting and recognizing moving targets. In conventional ISAR imaging, after removing the radial motion via motion compensation methods, the ISAR imaging is the same as turntable radar imaging, which uses the rotational motion to provide high cross-range resolution and a wide signal bandwidth to get high range resolution [
1,
2,
3,
4,
5]. Traditional imaging methods based on the matched filter (MF) are robust, but fail to achieve good performance due to the convolution effect of target scattering coefficients and the point spread function (PSF). Additionally, one-dimensional (1D) deconvolution algorithms, such as Wiener filtering, iterative constraint deconvolution (CID), Bayesian angular superresolution algorithm, and so on, have been used in forward looking scanning radar imaging for removing the convolution effect and achieving high cross-range resolution [
6,
7]. Nevertheless, the deconvolution methods always need many measurements in the range frequency and cross-range time domains to ensure the performance of deconvolution. However, the resulting high sampling rate poses difficulties for raw data transmission and storage. The recently-developed compressive sensing (CS) framework can reduce the measurements, but under the situation that the target is constructed by some sparsely-distributed scattering points, and the number of scattering points is much less than the number of imaging grids [
8,
9]. Additionally, the CS-based algorithms need to design a very accurate measurement matrix, and their recovery quality may be seriously affected by the accuracy of the measurement matrix, which is always influenced by system errors and off-grid error [
10,
11,
12]. Besides, the complexity of CS-based algorithms is huge, and the required signal to noise ratio (SNR) is relatively high, which results in instability in practical application.
Recently, matrix completion (MC) has been used for recovering a low rank matrix from a small set of corrupted entries by minimizing an objective function with a penalty term based on the matrix rank [
13,
14,
15], and it has been introduced to radar applications for reducing the measurements and recovering missing data [
16,
17,
18]. Bi et al. proposed a new high-resolution change imaging scheme based on MC and Bayesian compressive sensing for undersampled stepped-frequency-radar data [
16]. Yang et al. developed the link between MC and undersampled SAR imaging and further provided a practical way to recover the data [
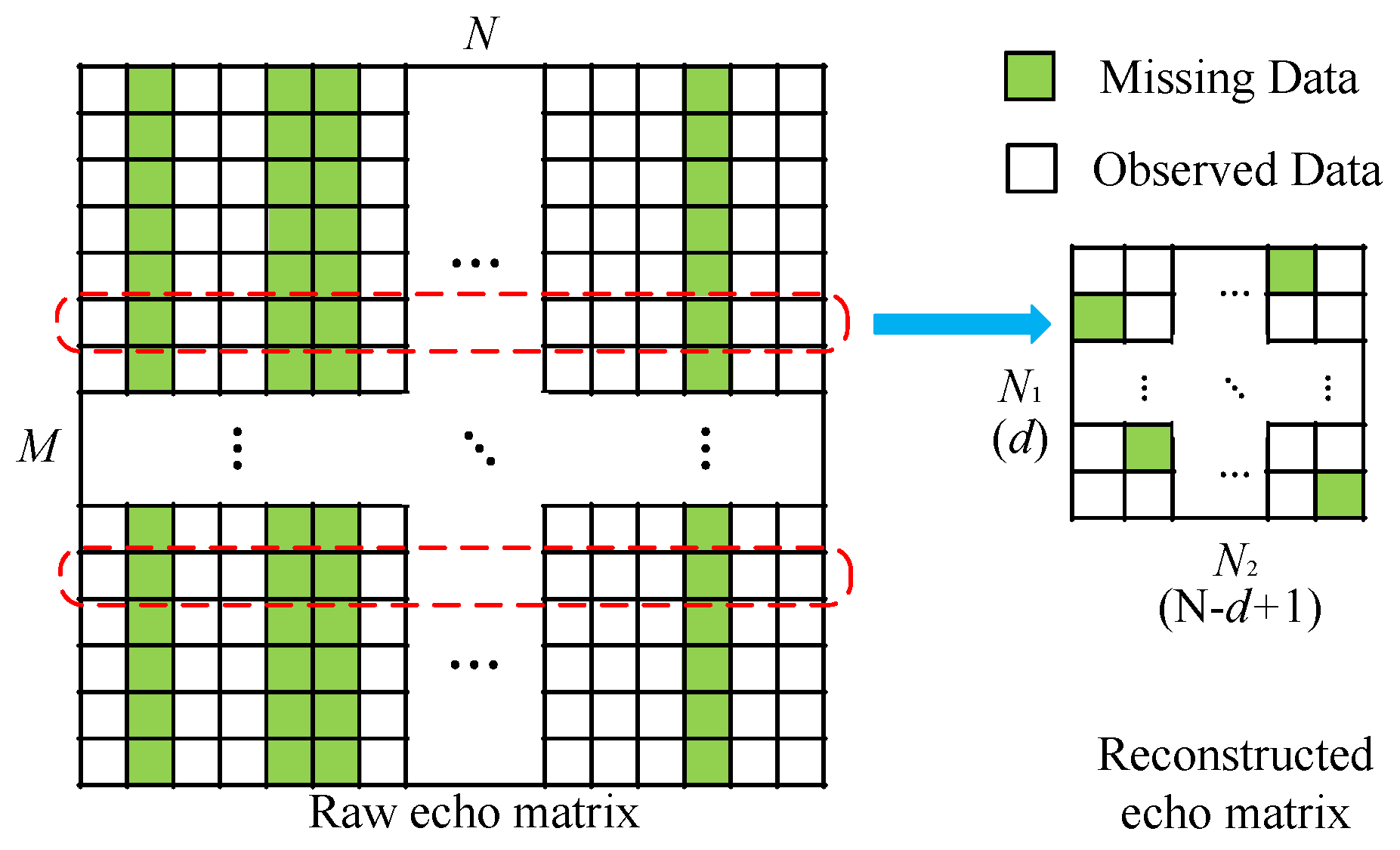
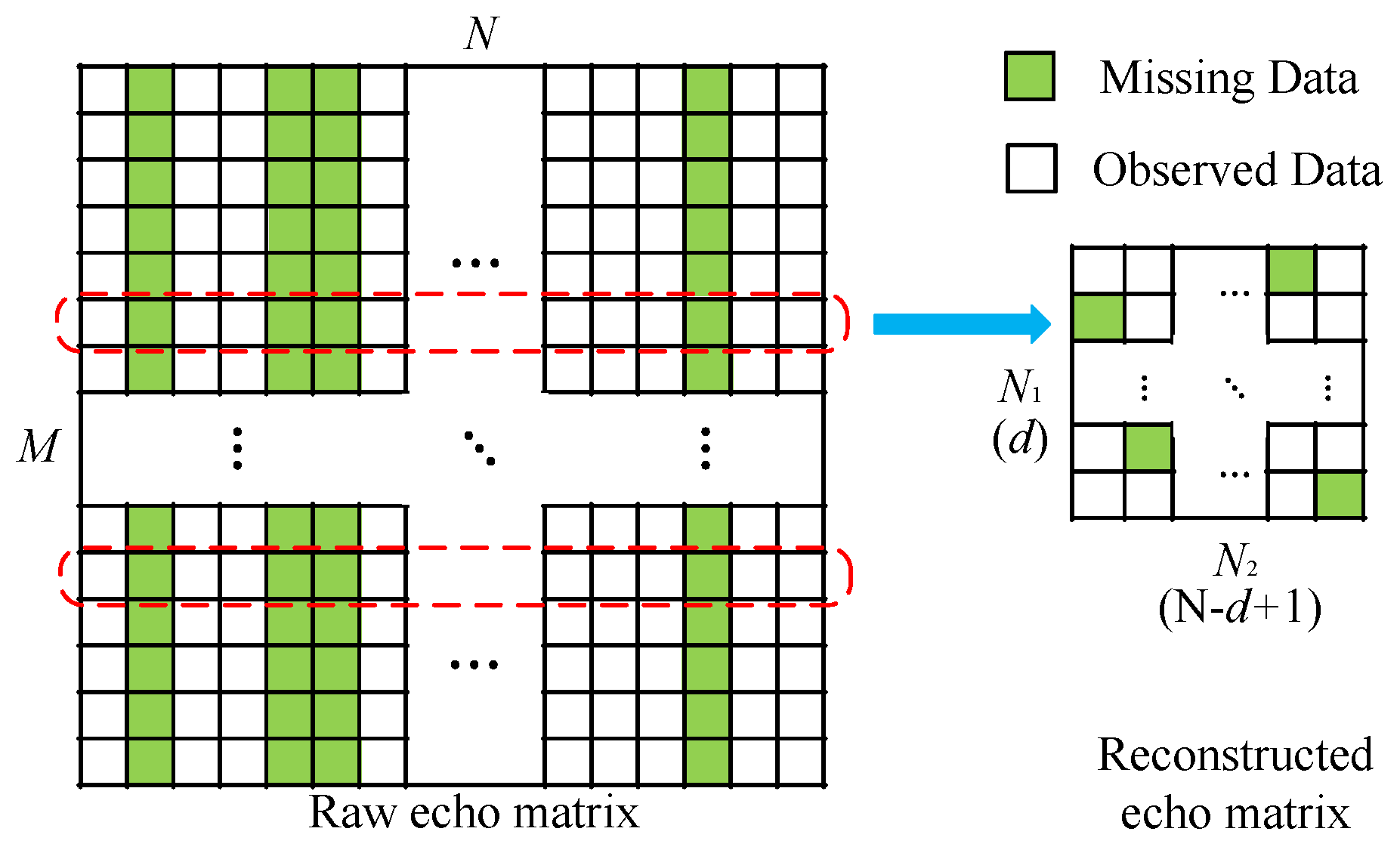
17]. For the application of radar data completion, the strategy of random rows or columns of missing data are more often used. However, the MC will not be useful for this situation because it can not recover a row or column without any information of this row or column [
14]. Therefore, [
16,
17] proposed the matrix reconstruction method for the echo of every row or column, and the reconstructed matrix satisfies the condition of MC because the observed data are randomly distributed in the reconstructed matrix. Both of their constructed matrices have a small size, and the low rank property may not hold. Then, Hu et al. proposed a new way of reshaping the sparse stepped frequency echo into a large-sized Hankel matrix form for ISAR imaging and improved the low rank property of the echo matrix [
18]. However, both the ways of matrix reconstruction must be repeated many times in order to complete the missing rows or columns, which would greatly increase the computational burden.
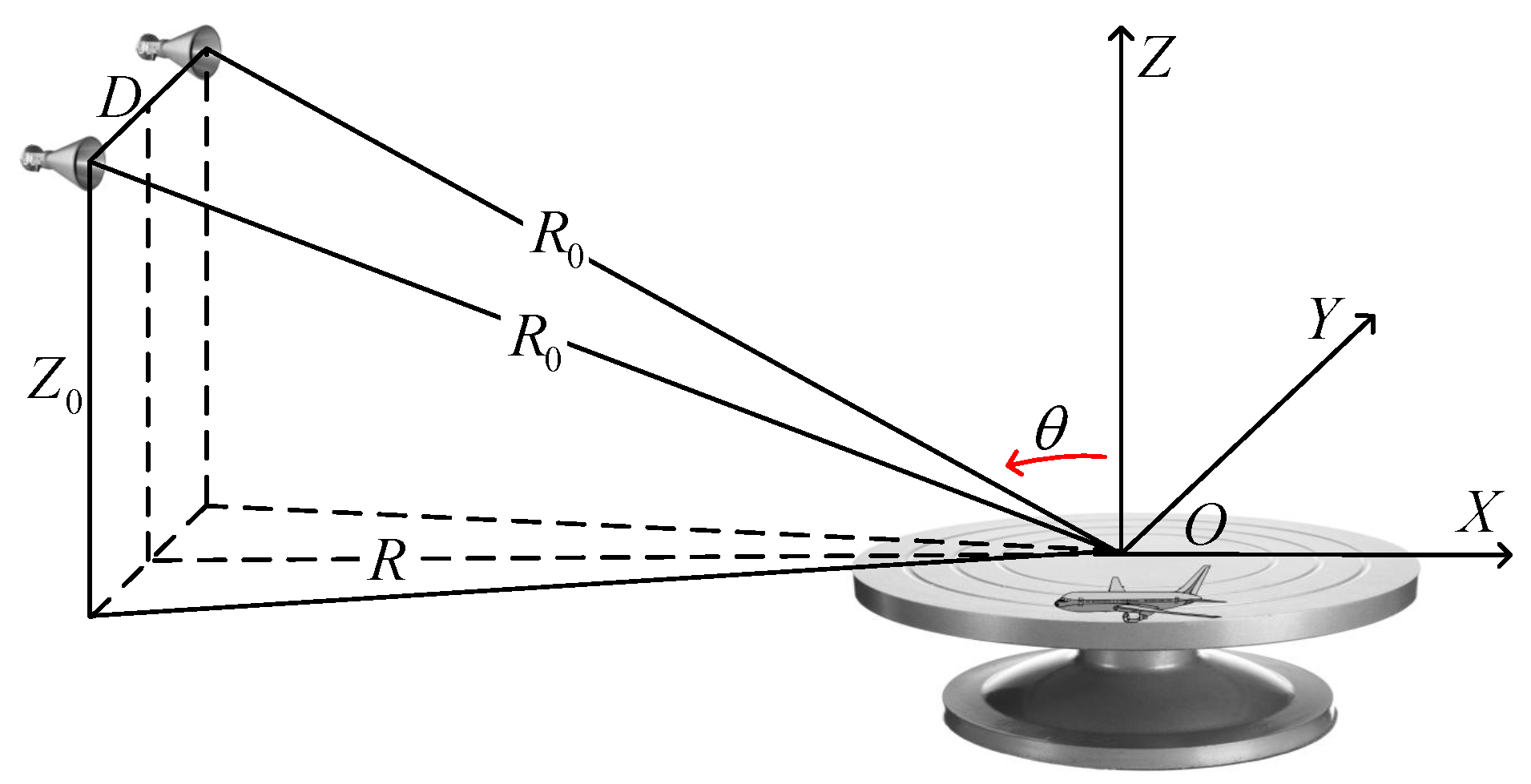
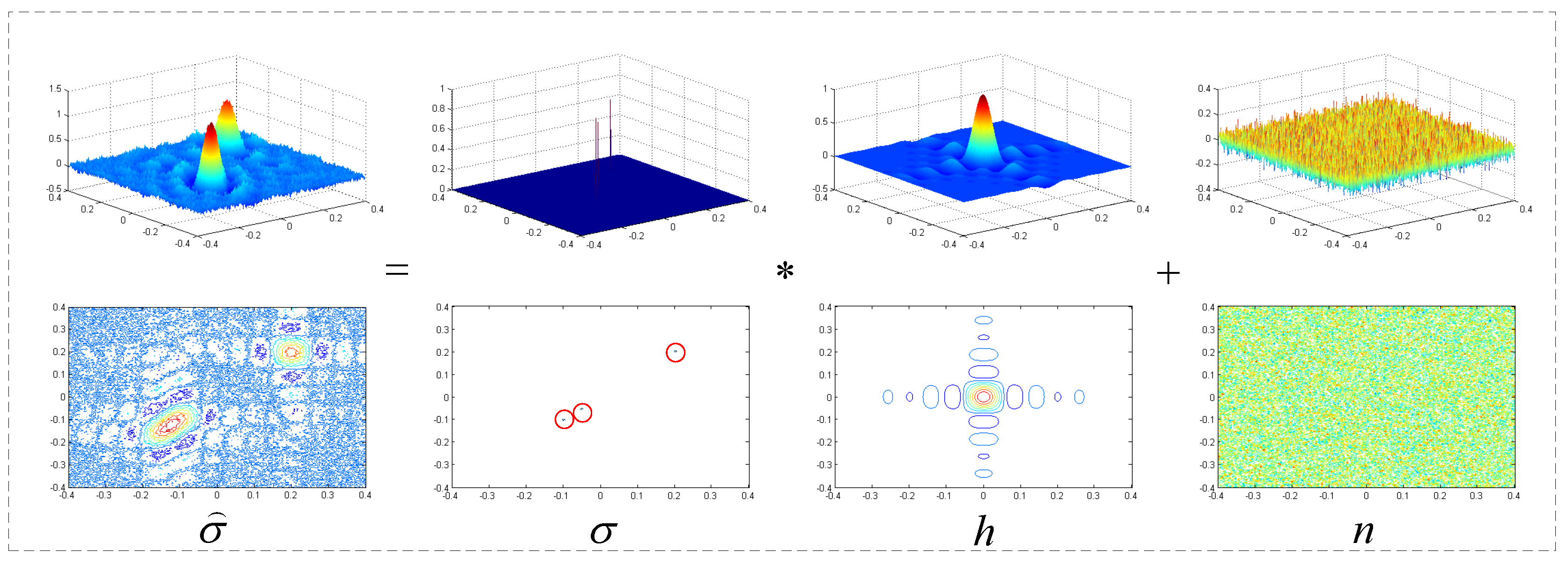
Inspired by the high resolution radar imaging with 1D deconvolution operation for forward looking radar, we generalize it to 2D turntable radar imaging to achieve 2D high resolution radar imaging. Firstly, we derive the 2D convolution model for the turntable radar based on the MF algorithm and analyze the influence of azimuthal undersampled data on the deconvolution method. Then, in order to complete the missing data and improve the performance of deconvolution, we use the MC technique for missing data completion. Compared to other existing methods for real data MC, we propose an improved method for complex echo MC based on the hyperbolic tangent constraint to improve the performance of MC. In addition, we modify the way of echo matrix reconstruction to improve the low rank property of the echo matrix and need only one MC operation for all elements completion. Then, after the MC of echo, we introduce a new 2D deconvolution algorithm for improving the ill condition of deconvolution. At last, through many simulation and experimental results, we can verify the effectiveness of the proposed method.
The outline of this paper is summarized as follows. The 2D convolution signal model and direct deconvolution problem under undersampled data for turntable radar imaging are formulated in
Section 2. Novel algorithms for MC and 2D deconvolution imaging are proposed in
Section 3. Extensive numerical simulations and experiments are presented to verify the proposed method in
Section 4. Finally, the conclusions are drawn in
Section 5.
Notations used in this paper are as follows. Bold case letters are reserved for vectors and matrices, respectively. is a diagonal matrix with its diagonal entries being the entries of a vector . and are two-dimensional Fourier and inverse Fourier transform. denotes the singular value decomposition. , ⊙, * and ⊗ indicate the inner product, the Hadamard (element-wise) product, the convolution and the correlation operation. , and are the norm, Frobenius norm and nuclear norm. , , and denote the transpose, conjugate transpose, conjugate and real part operations, respectively.
4. Simulation and Experimental Results
In this section, we present several numerical simulation and experimental results to illustrate the performance of the proposed method. All of the results are performed by using MATLAB R2014a on a PC equipped with an Inter Core i5-4590 CPU, 3.3 GHz and 12 GB memory. The normalized mean square error (NMSE) is used for evaluating the performance of simulation results. The image entropy (IE) [
26] and image contrast (IC) [
27] are used for measuring the performance of experimental results, where low values of IE and high values of IC generally mean that the image is well recovered. The most commonly-used classical MC algorithms, such as SVT [
15], the inexact ALM method [
28], etc., and deconvolution algorithms, like Wiener filtering algorithm [
29], iterative constraint deconvolution (CID) [
30], etc., are selected for comparison.
4.1. Numerical Simulations
The simulation conditions are given in
Table 1. Ten point targets are randomly distributed in the imaging area. We set
for the echo reconstruction.
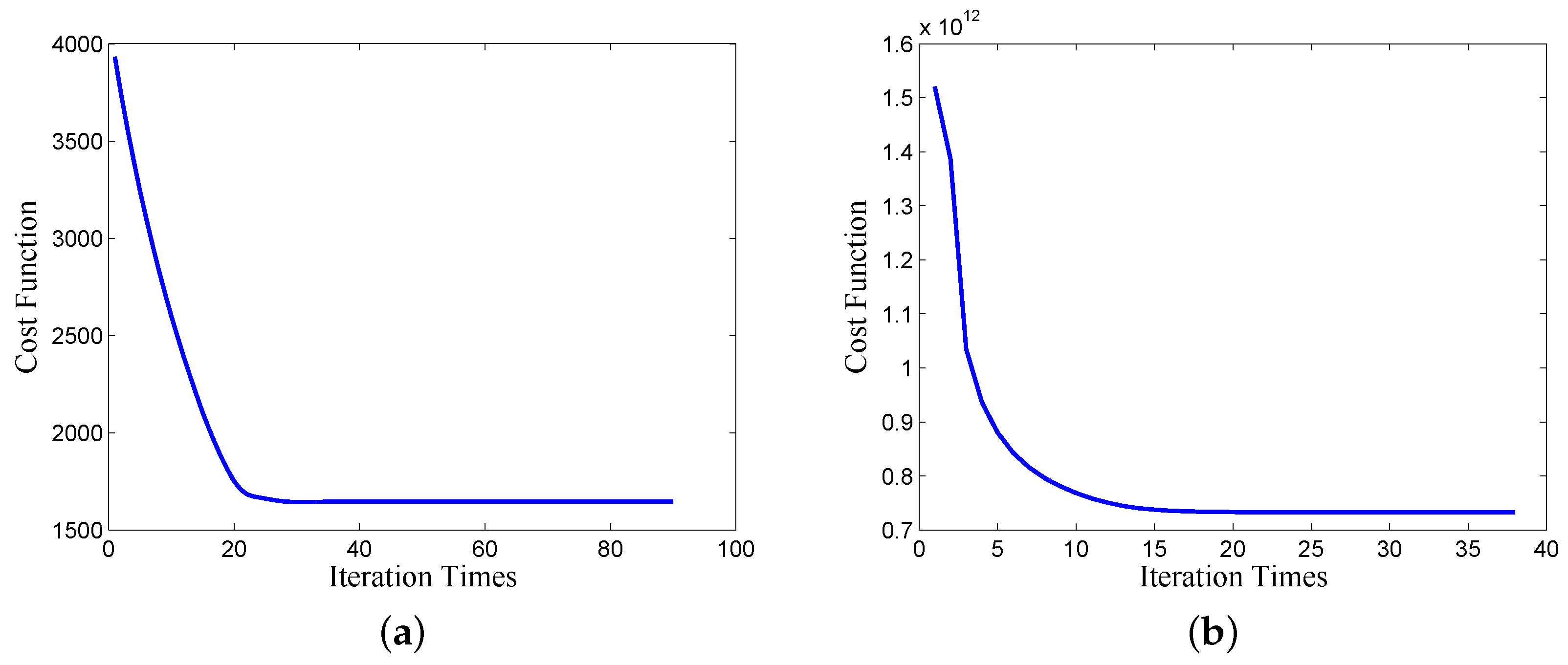
Firstly, during the iterative process, the cost functions for the proposed MC and deconvolution algorithm keep decreasing after each iteration, as shown in
Figure 11, which further demonstrates the convergence of the proposed algorithms.
For the next simulation, we use the matrix reconstruction method of [
17] + SVT and the matrix reconstruction method of [
18] + the inexact ALM method for comparing the MC algorithms. The winnerfiltering algorithm and CID are used for comparing deconvolution algorithms.
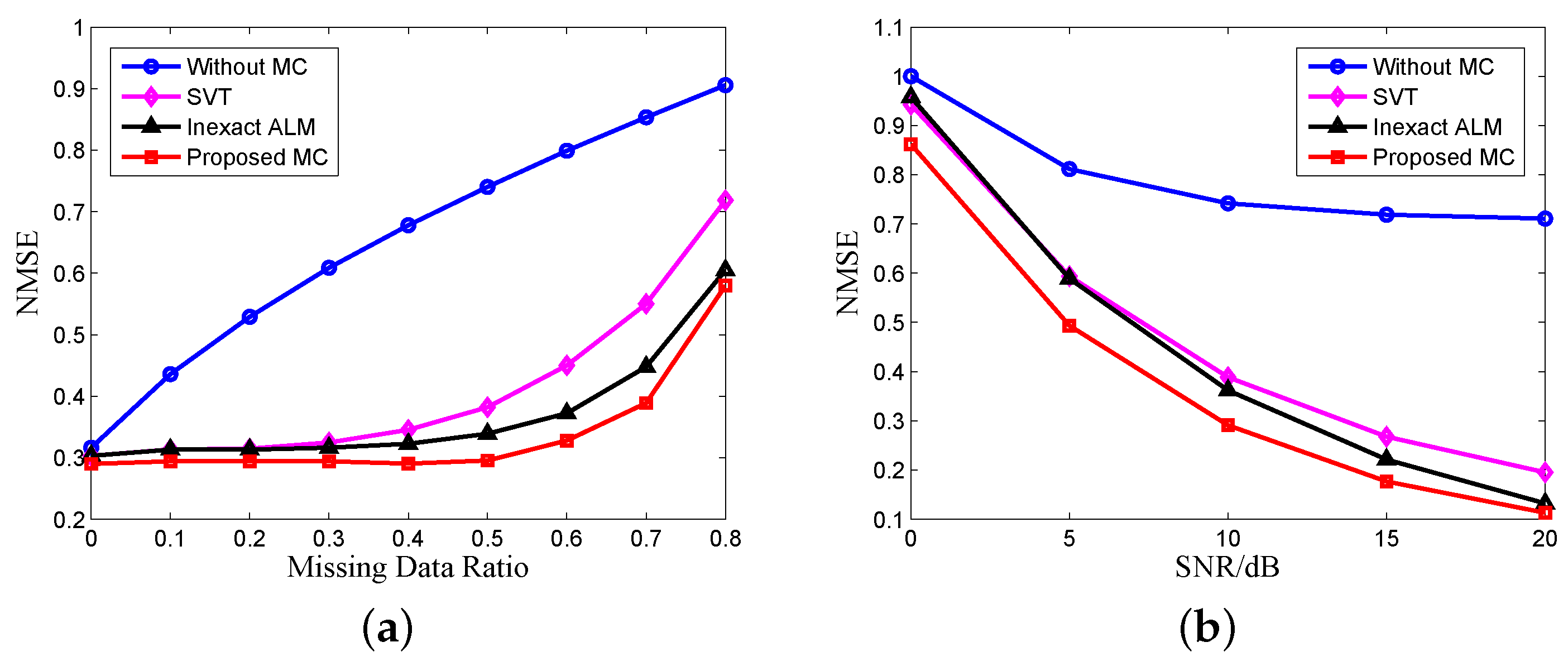
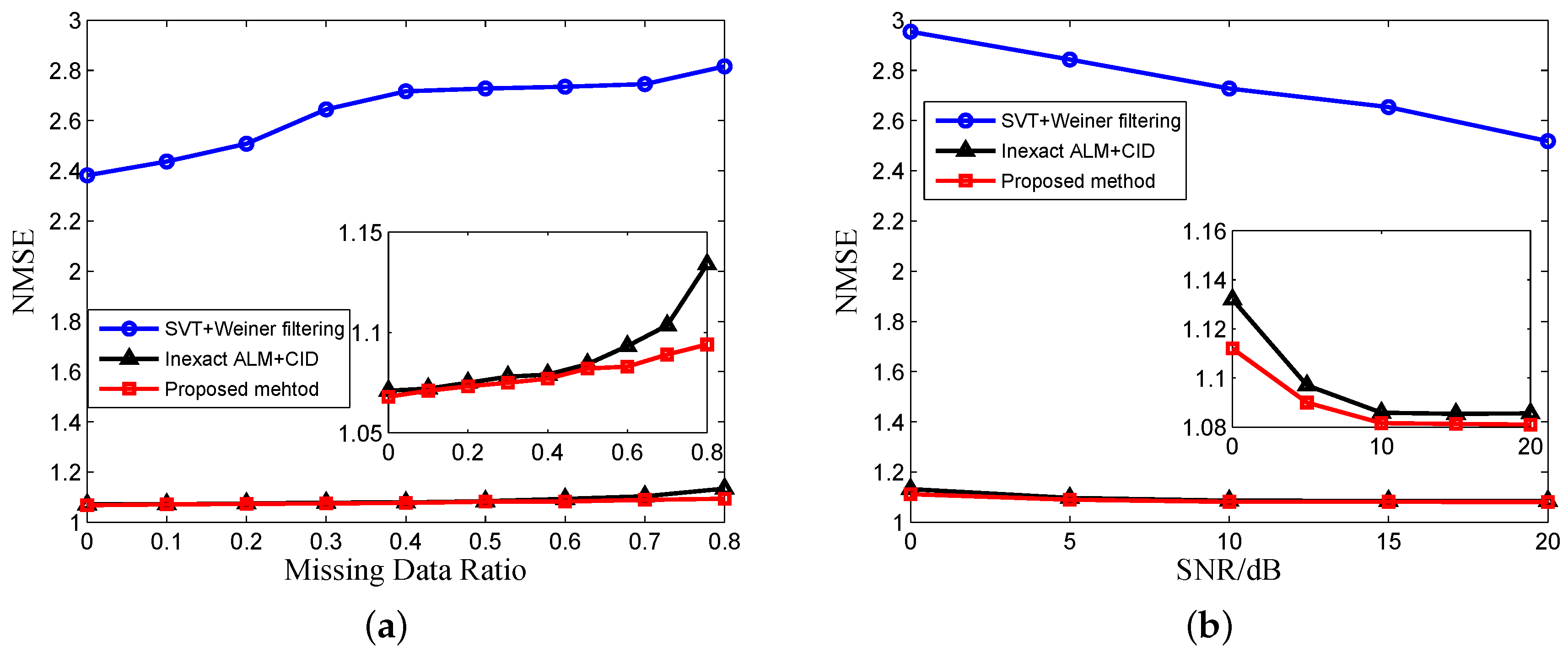
Figure 12 shows the NMSE of results without and with MC versus the number of missing data and echo SNR using different MC algorithms, which is averaged over 100 Monte Carlo trials. The missing data are randomly distributed. We can see that our proposed MC algorithm has the best recovery result because our reconstructed matrix has the best low rank property, and our proposed MC algorithm with the nonconvex constraint has better performance than the traditional nuclear norm. SNR has greater impact on the MC algorithm because when the SNR is very low, the low rank property of the echo matrix will decrease rapidly.
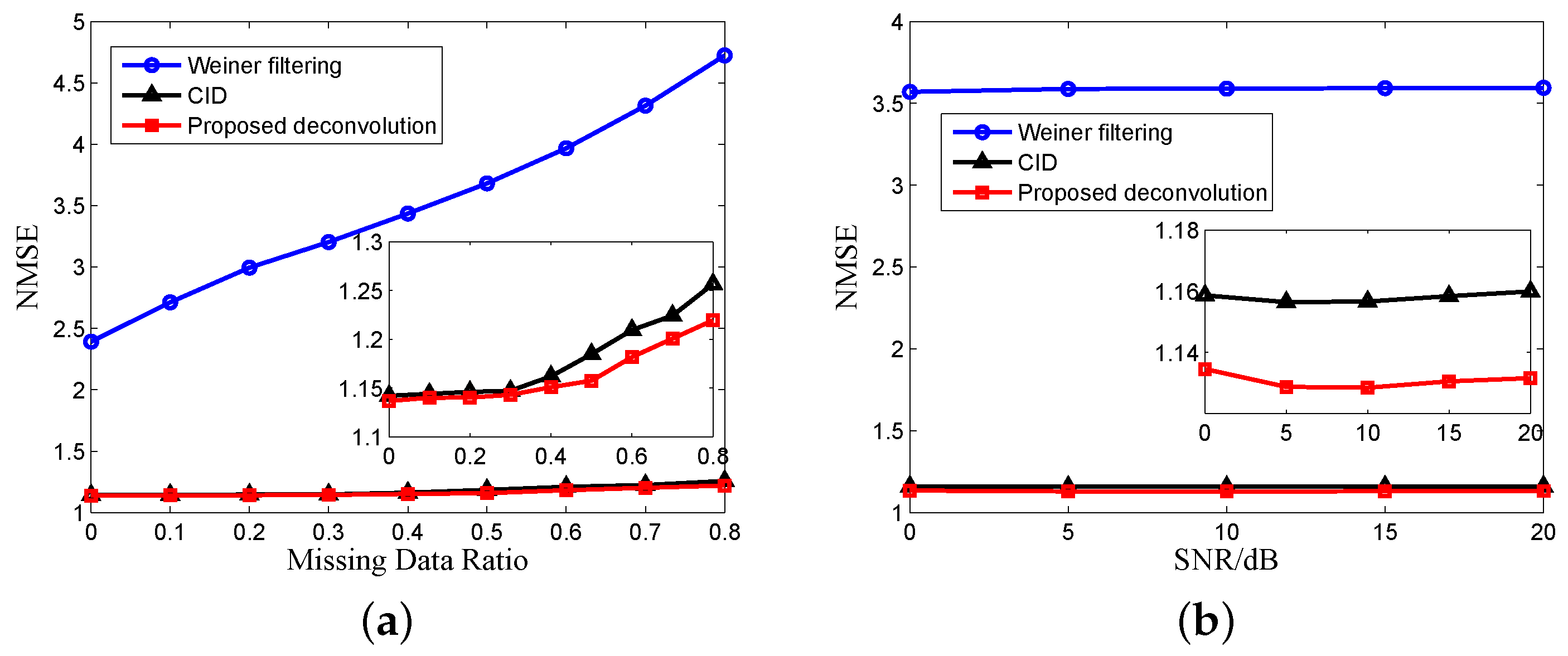
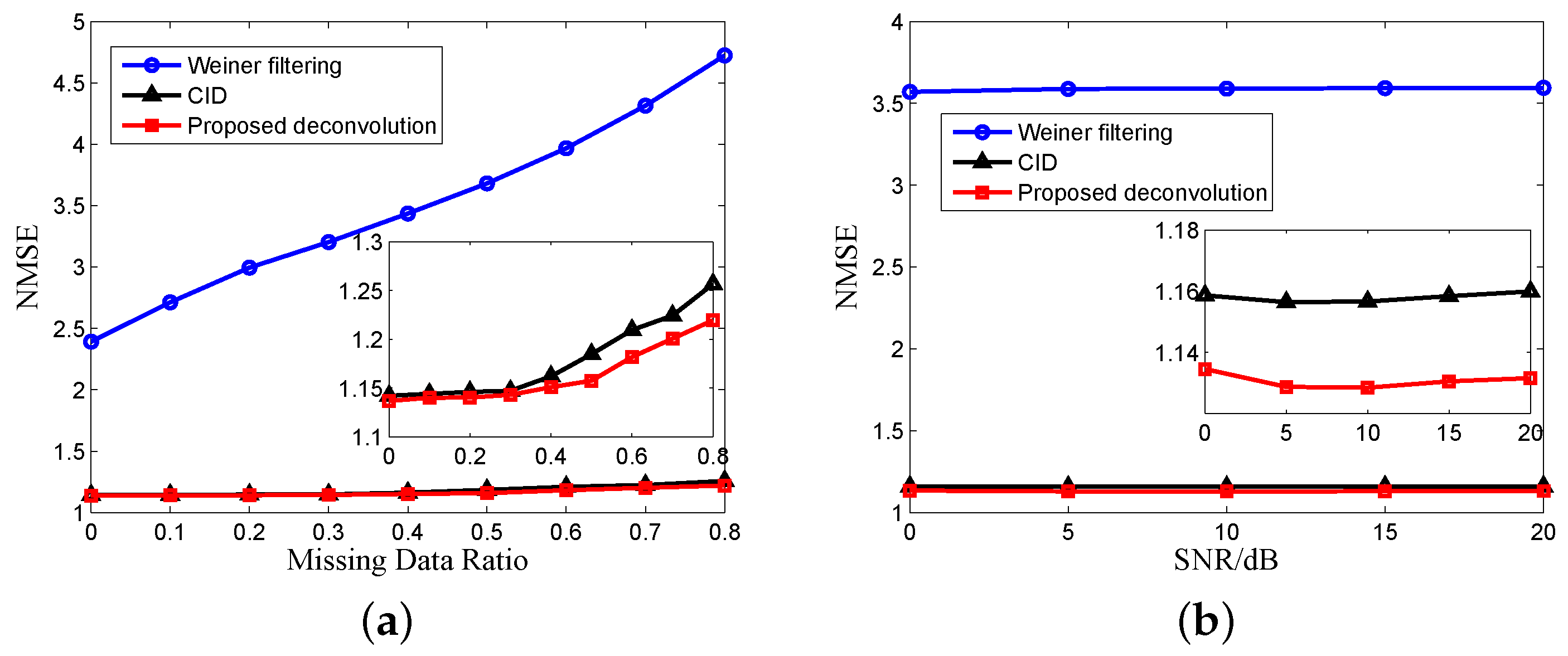
Figure 13 is the NMSE of the results versus the number of missing data and SNR using different deconvolution algorithms. It can be seen from
Figure 13a that the performance of the deconvolution algorithms becomes worse with the increase of missing data. The conclusion is similar to our previous analysis and illustrates the necessity of echo completion. In
Figure 13b, the SNR has little influence on the performance of deconvolution because after MF, the noise is suppressed, and the SNR of echo is enhanced.
The NMSE results after both MC and deconvolution versus the number of missing data and SNR are shown in
Figure 14. Comparing
Figure 13a with
Figure 14a, we can see that the MC can improve the performance of deconvolution with undersampled data. The recovery results in
Figure 14b are affected by SNR, which is different from
Figure 13b, because the performance of MC algorithms is affected by noise, as shown in
Figure 12b. In practical applications, the echo SNR after MF is usually not very high, and our proposed method will have better performance. From
Figure 12,
Figure 13 and
Figure 14, we can see the superiority of the proposed algorithm compared to traditional algorithms, and we choose the matrix reconstruction method of [
18] + the inexact ALM method + CID for comparison in the following processing of experimental data.
4.2. Experimental Results
In this subsection, some experimental results are reported to illustrate the validity and effectiveness of the proposed method. We also show the reconstructed results by MF and the matrix reconstruction method of [
18] + the inexact ALM method + the CID method for comparison.
4.2.1. ISAR Imaging
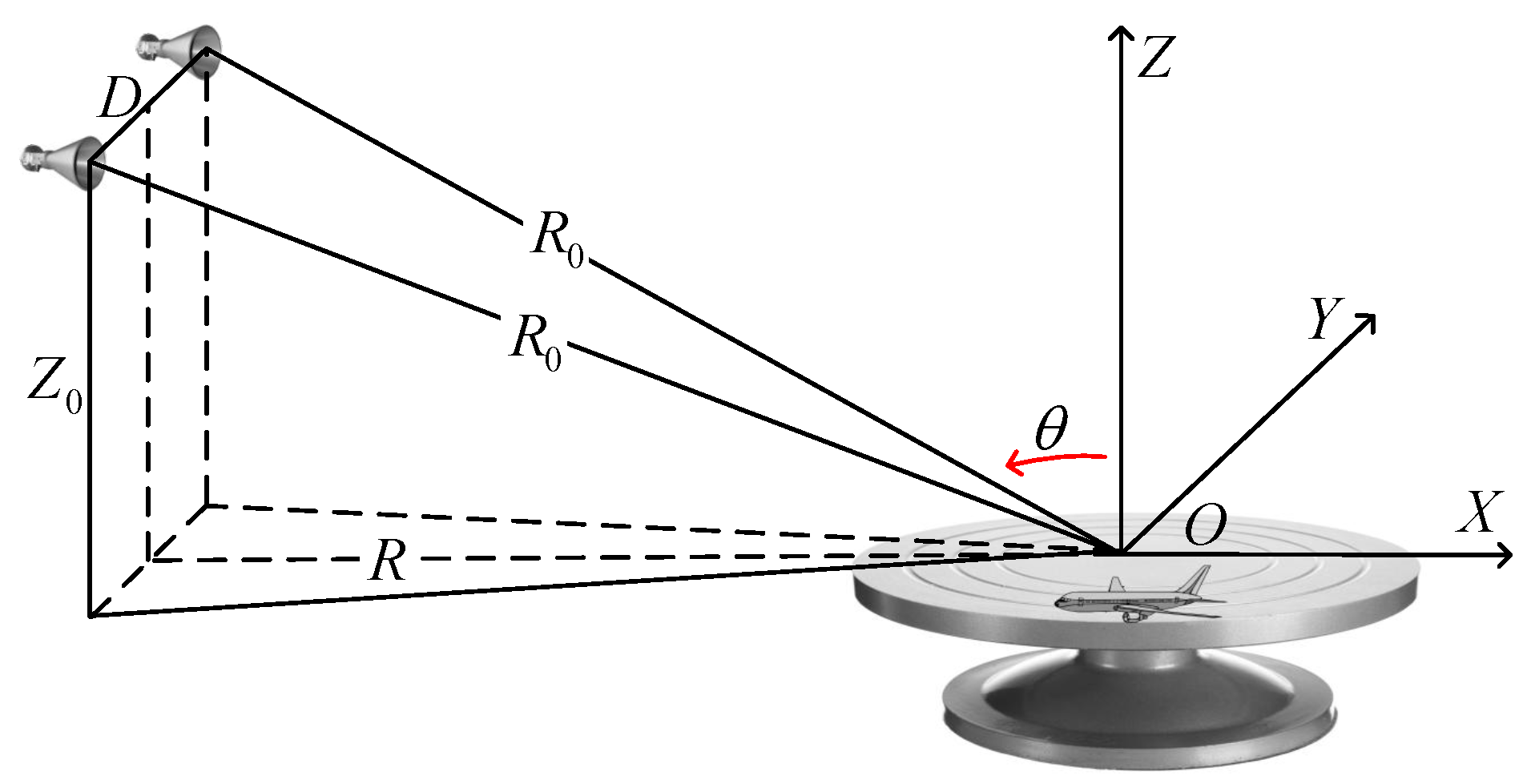
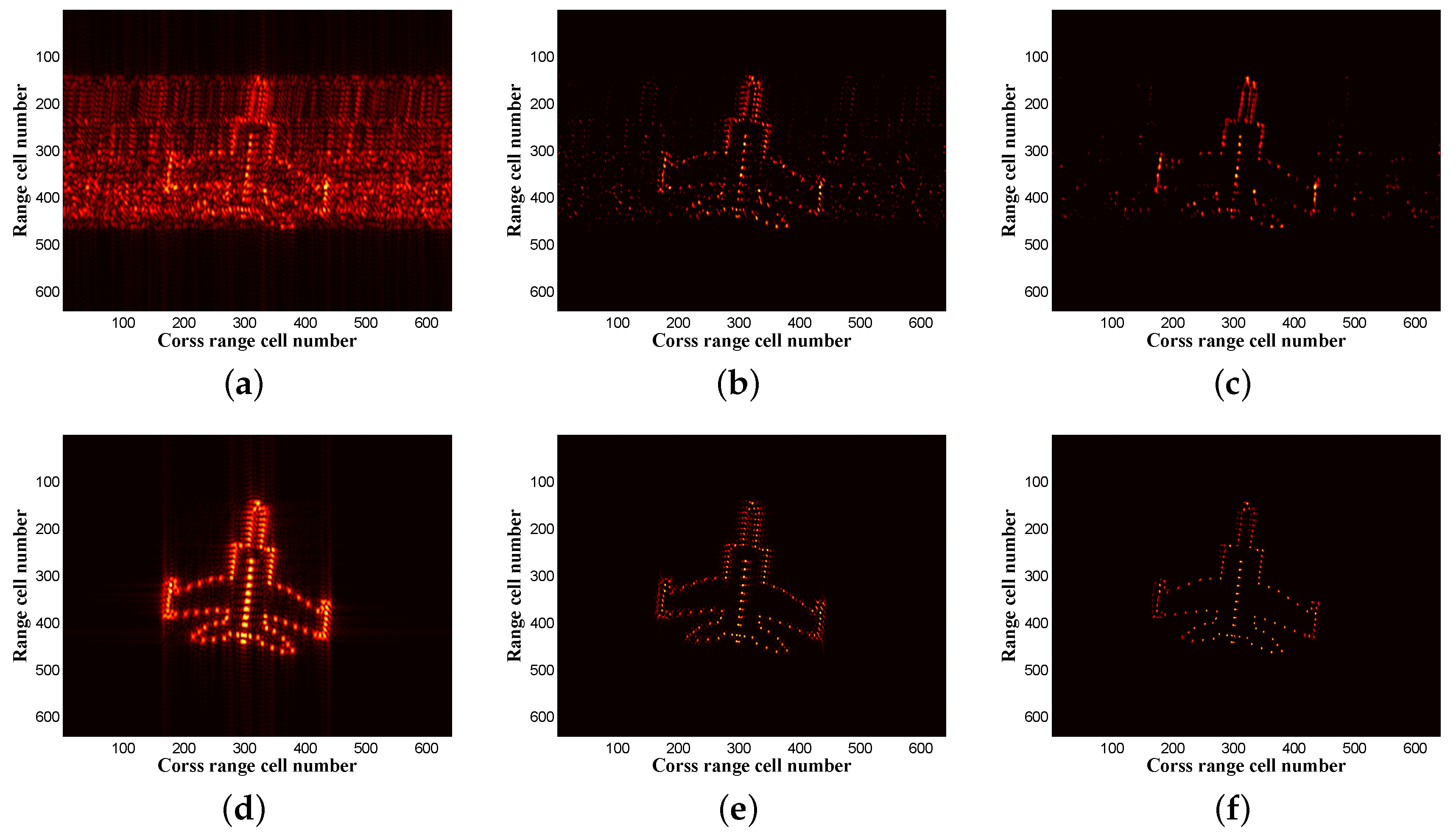
As we all know, after translational motion compensation, the ISAR imaging is similar to the turntable model in this paper under the assumption that . In this subsection, the quasi real data of an airplane (MIG25) provided by the U.S. Naval Research Laboratory are used, which transmit the stepped frequency (SF) signal with the center frequency of 9 GHz and the bandwidth of 512 MHz and consist of 512 cross-range samplings with 128 samplings used here and 64 range samplings.
To illustrate the validity of the proposed method, the reconstructed results of different methods with
cross-range data (32 samplings) are compared in
Figure 15, where we set
,
,
,
. The observed data are randomly selected.
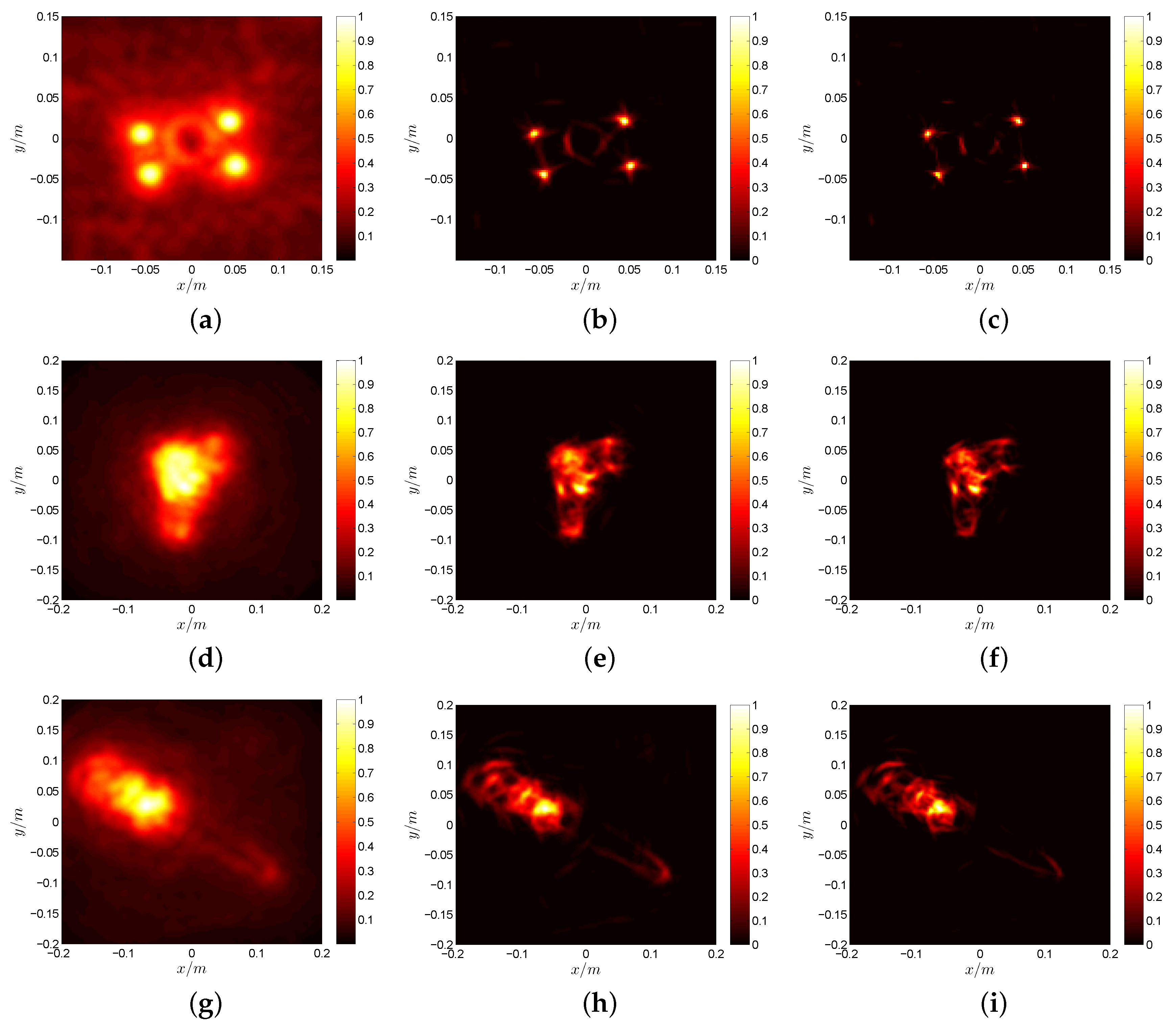
Figure 15a–c shows the recovery results by different methods without MC.
Figure 15d–f is the recovery results by different methods with MC. We can clearly see that without MC, the results of MF and deconvolution appear as many false scattering points, which are caused by partial data missing, and the false points can be eliminated through MC shown as
Figure 15d–f. Our proposed method has better recovery performance with a clear object image by comparing
Figure 15e with
Figure 15f, which can be further validated by the IE and IC values of the recovered ISAR images under different methods calculated in
Table 2. Although only
of the data are used here and the target model consists of many scattering points, good imaging results are obtained due to the high SNR of echo. Both the IC and the IE values confirm image quality improvement when the proposed method is used.
4.2.2. Turntable Radar Imaging
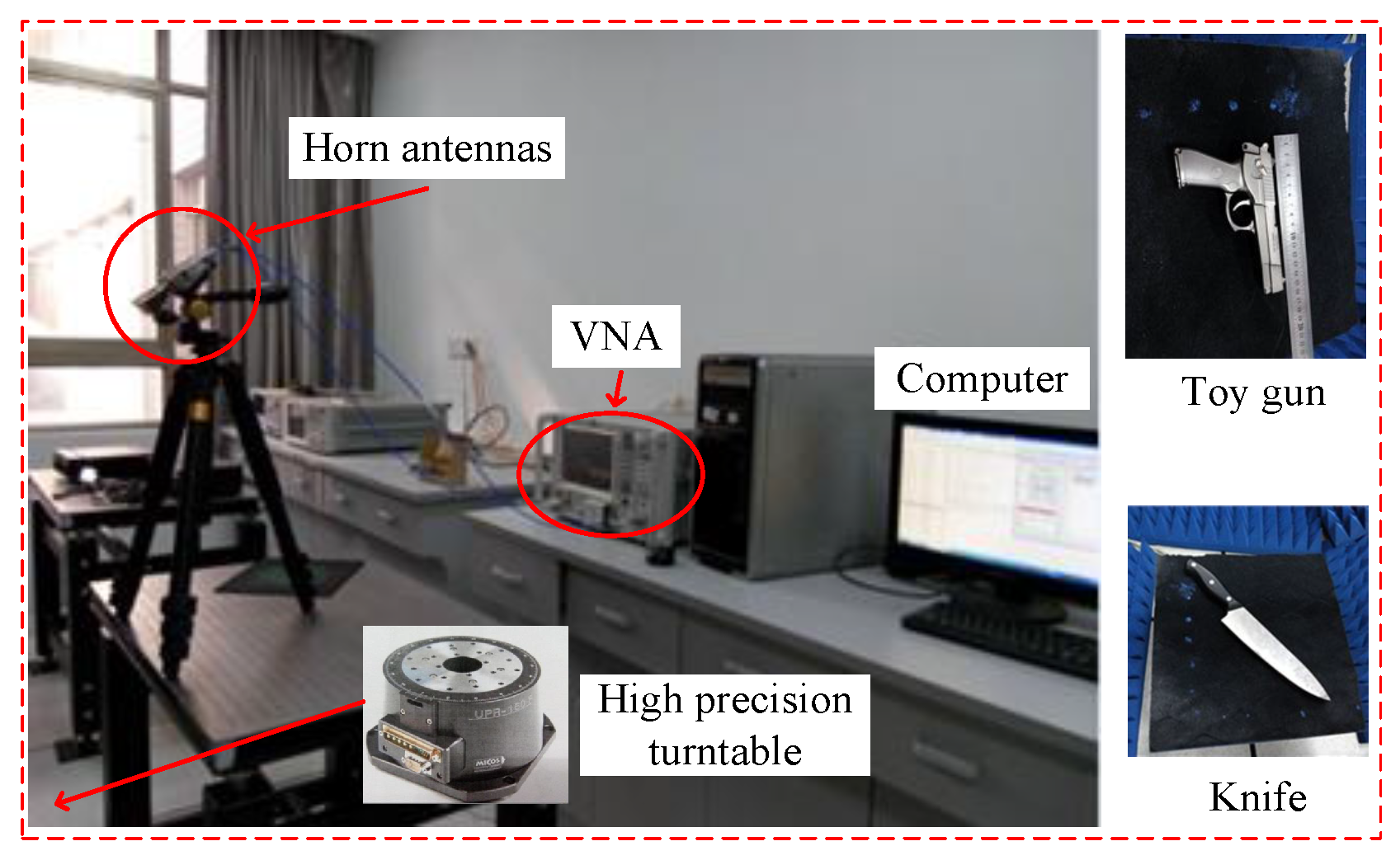
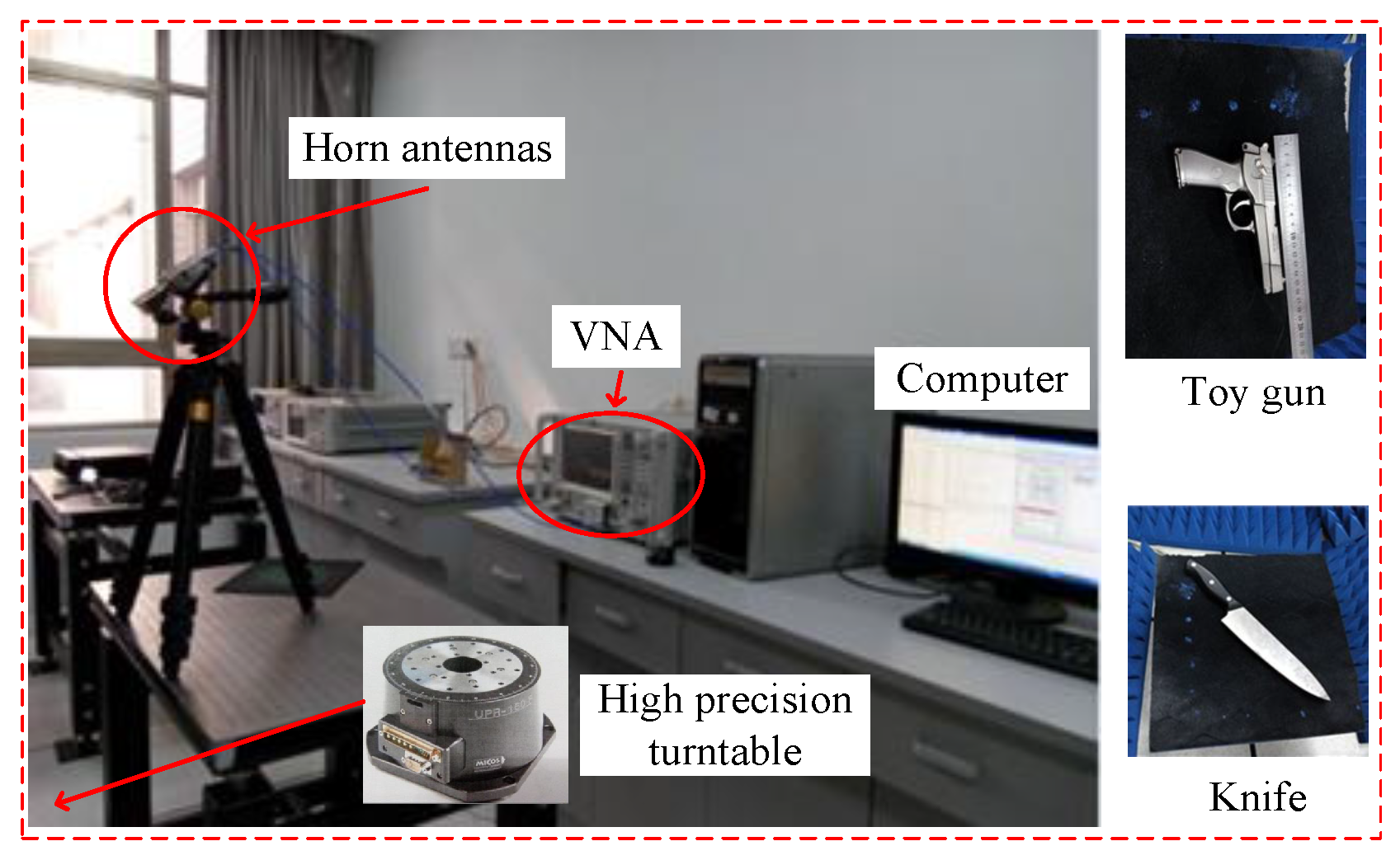
An SF radar is used in the experiment as shown in
Figure 16, which contains a vector network analyzer (VNA) operating within 0.1∼40 GHz, two horn antennas, a high precision turntable and a control computer. The targets are four metal balls with an 8-mm diameter, a toy gun and a knife. The measurement parameters are shown in
Table 3. We divide the azimuthal data into 72 segments, and for each segment, we can use the proposed model for approximation. Then, we process every segment and fuse the results of all of the segments in order to avoid the changing of the scattering characteristic due to different observation angles in the case of a large rotation angle. Fifty percent of cross-range data chosen randomly are used here. We set
for matrix reconstruction.
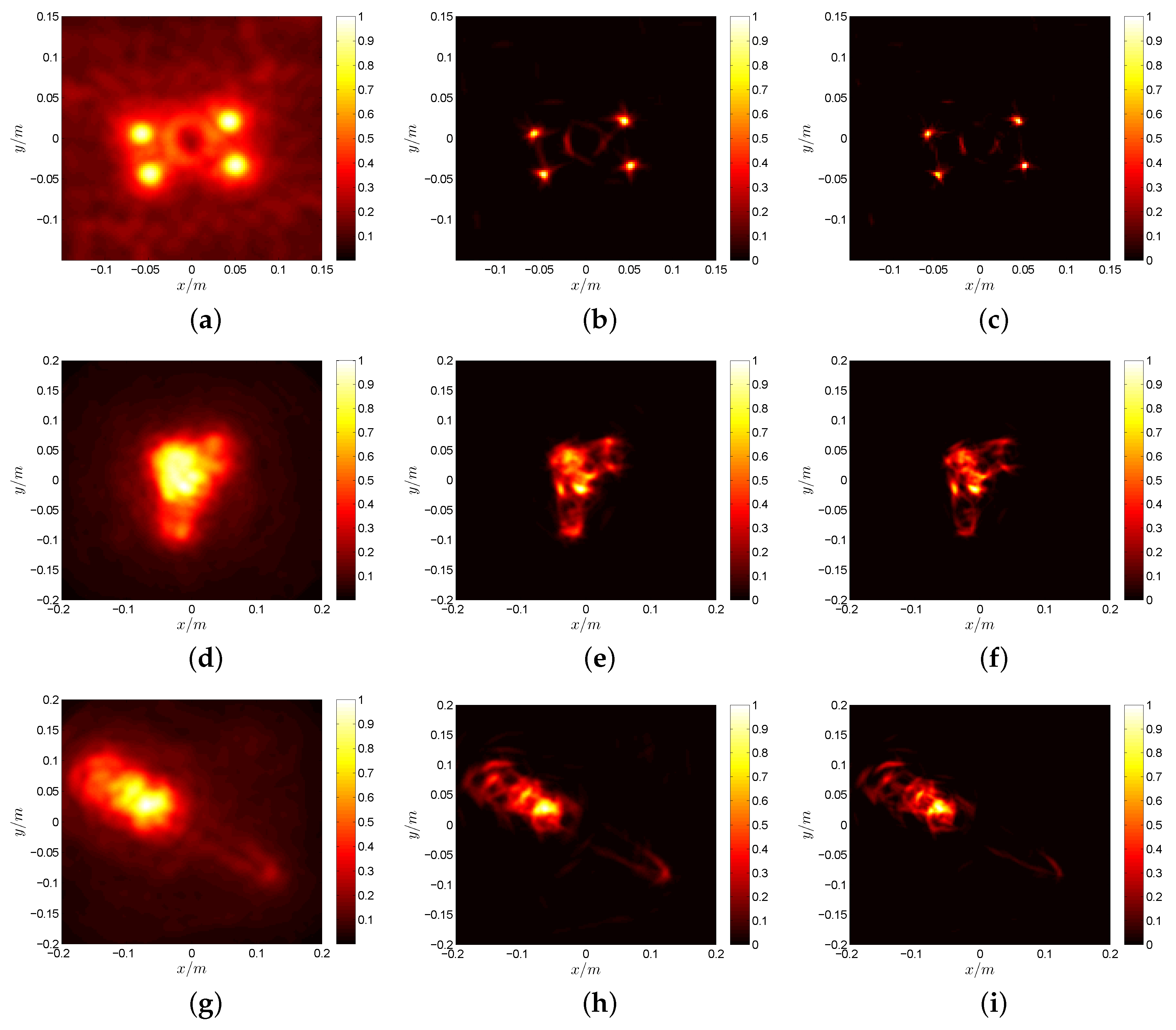
Figure 17 shows the results of MF, the inexact ALM method + the CID method and the proposed method, respectively, by using
of the azimuth full data. The used data are randomly selected. In this experiment, we use three different kinds of targets to test our proposed method, including the simple target of metal balls and complex targets, like toy gun and knife. The metal balls can be treated as the scattering model with fewer targets, while the toy gun and knife are composed of a large number of scattering points. Therefore, the imaging results of toy gun and knife are not as good as metal balls due to the poor low rank property under a large number of scattering points. It should be noticed that the handle of the knife has diffuse reflectivity, and the blade has specular reflectivity, so the strong scattering points of the knife are located in the handle, and the blade is not very clear, as shown in
Figure 17g–i.
Figure 17a,d,g is the results of MF, and they are blurred by the convolution effect under limited bandwidth and rotation angle. After the process of MC and deconvolution, the recovered images become much clearer and more conducive to target recognition. Our proposed method has a narrower main lobe and can obtain the object contour clearly compared to traditional methods. Additionally, the image quality improvement of our proposed method can be further confirmed according to the IE and IC values shown in
Table 4. Our proposed method does not get a very significant performance boost for the complex targets according to
Figure 17 and
Table 4. This is mainly due to two following reasons. The low rank property of the reconstructed echo matrix is not very good because of the large number of scattering points and the small size of the matrix. The SNR of the raw data is not high under the constraint of transmit power and the influence of system noise and errors.
4.3. Discussion
Based on the above content, our proposed method can be mainly divided into two parts: MC and deconvolution. For the algorithm of MC, the number of observed data (
m), the size of the matrix (
), the rank of the matrix (
r) and SNR are the main factors that affect the performance of MC. According to the conclusion of Candès et al. [
13,
14],
should be satisfied, where
C is a numerical constant and
μ is the strong incoherence parameter. This means that a fixed matrix with a larger rank demands more observed data. The result of MC
obeys
, where
,
δ is decided by the noise level and satisfies
with high probability, and
σ is the standard deviation of the white noise. Obviously, less missing data and a high SNR lead to high recovery accuracy of MC, which can also be obtained from our simulations and experimental results. From
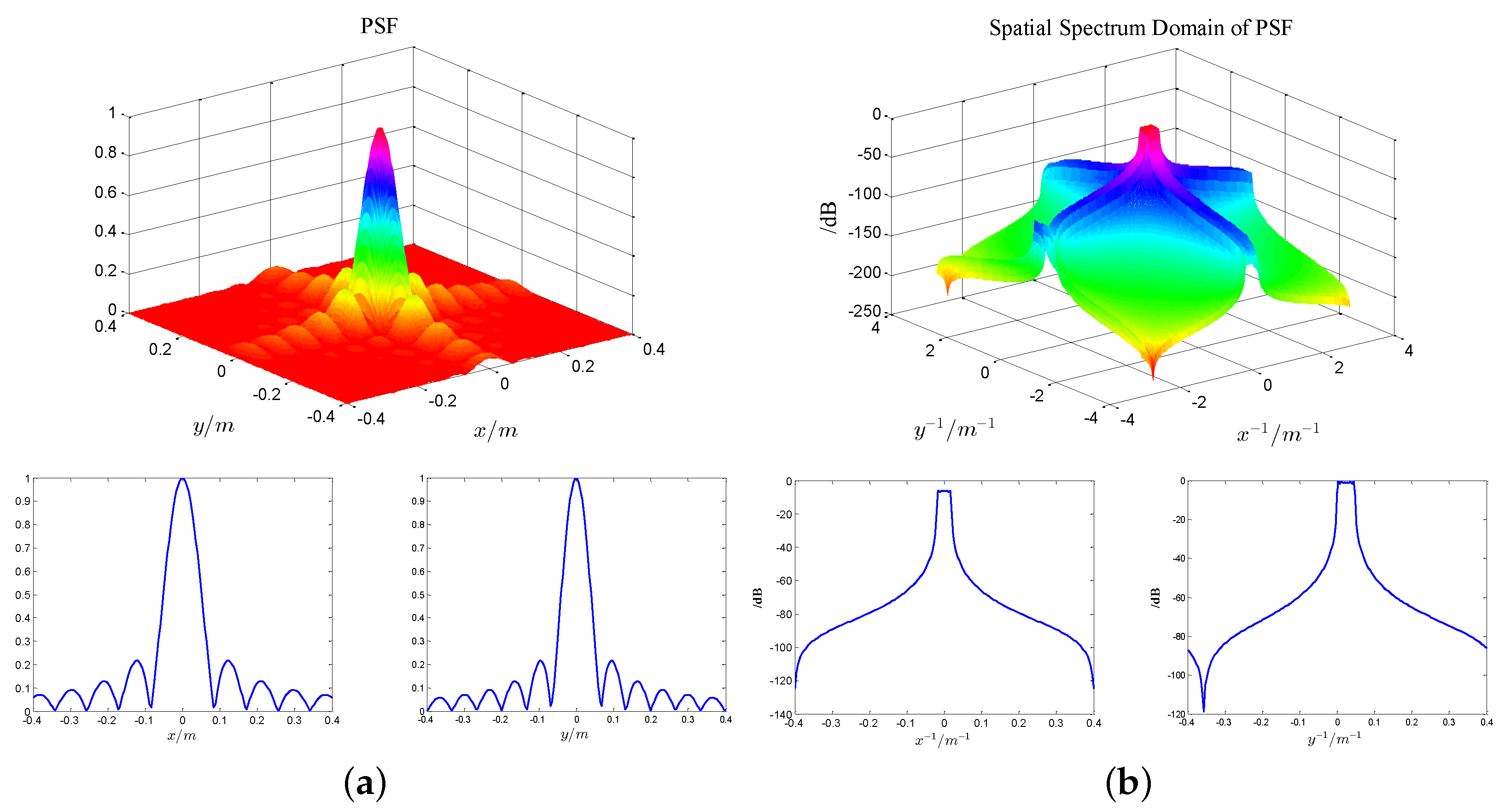
Figure 12, we can see that when the missing data ratio is smaller than 0.5 and the SNR is larger than 10 dB, the recovery result of MC shows good performance. For the deconvolution, its performance is affected by SNR and the spectral characteristics of PSF. It is worth noting that MF can improve the SNR of echo because MF is based on the maximum SNR criterion. Additionally, after MF, the SNR of the signal satisfies the requirement of the deconvolution algorithms, and the increased SNR of raw data has little impact on the performance promotion of the deconvolution results, which can be seen from
Figure 13b. The PSFs under different missing data ratios are different, and the deconvolution has better performance when the ratio is smaller than 0.5, as shown in
Figure 13a. Therefore, if the missing data ratio is smaller than 0.5 and SNR is larger than 10 dB, our proposed method has a significant performance boost. The requirement of observed data will reduce if the SNR increases, and the requirement of SNR will decrease if the number of observed data increases. In this paper, the influence of the number of scattering points on the performance of the proposed method is not discussed under the assumption that the strong scattering points for the turntable radar are sparsely distributed under high frequency. For the target with too many scattering points, the performance of the proposed method will decrease because it does not meet the condition of MC. In this situation, more observed data are needed to improve the low rank property of the echo matrix.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}