
ISAR Imaging of Ship Targets Based on an Integrated Cubic Phase Bilinear Autocorrelation Function

Abstract
:1. Introduction
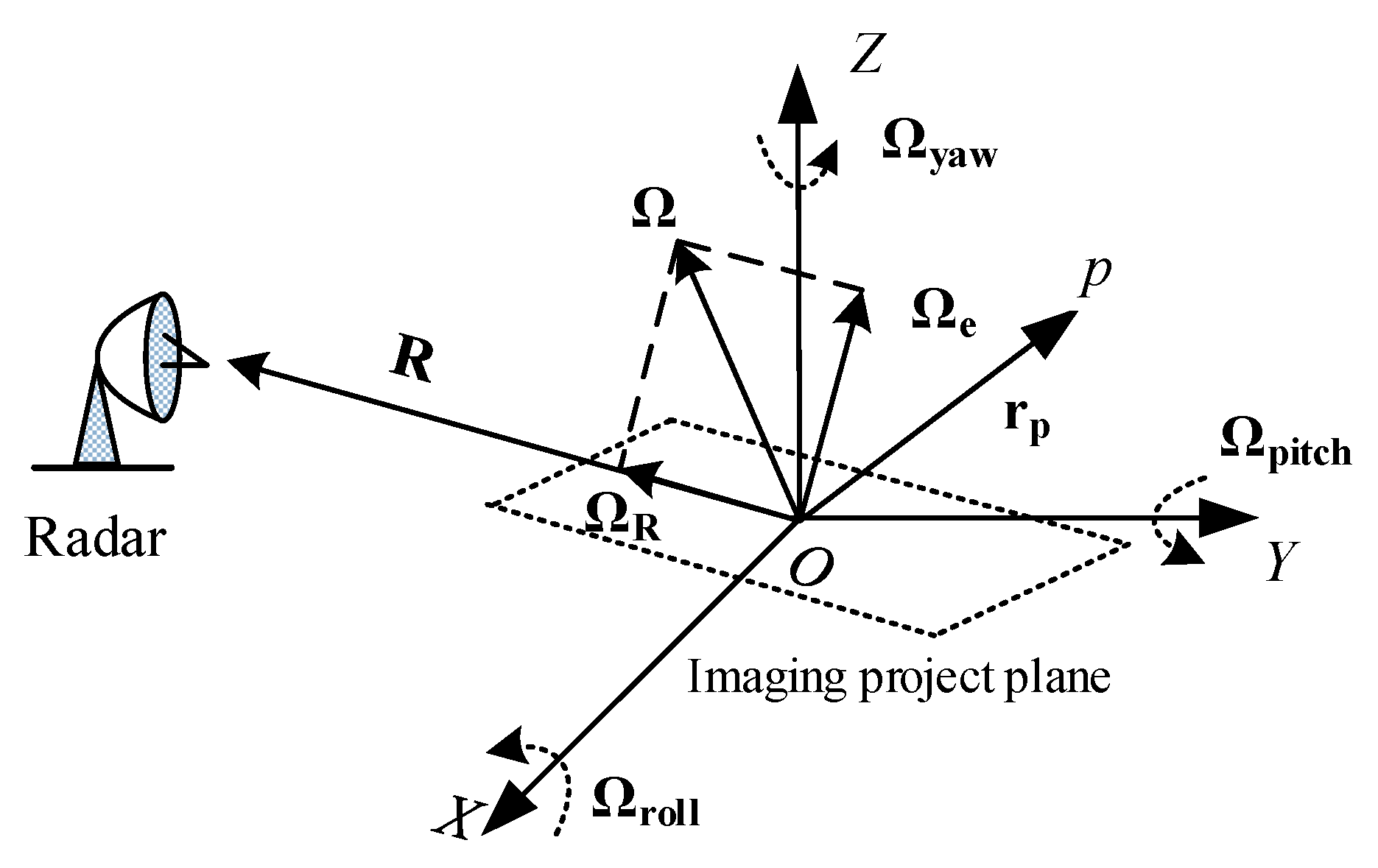
2. ISAR Imaging Geometry for the Ship Target
3. ICPBAF for Multicomponent CPSs
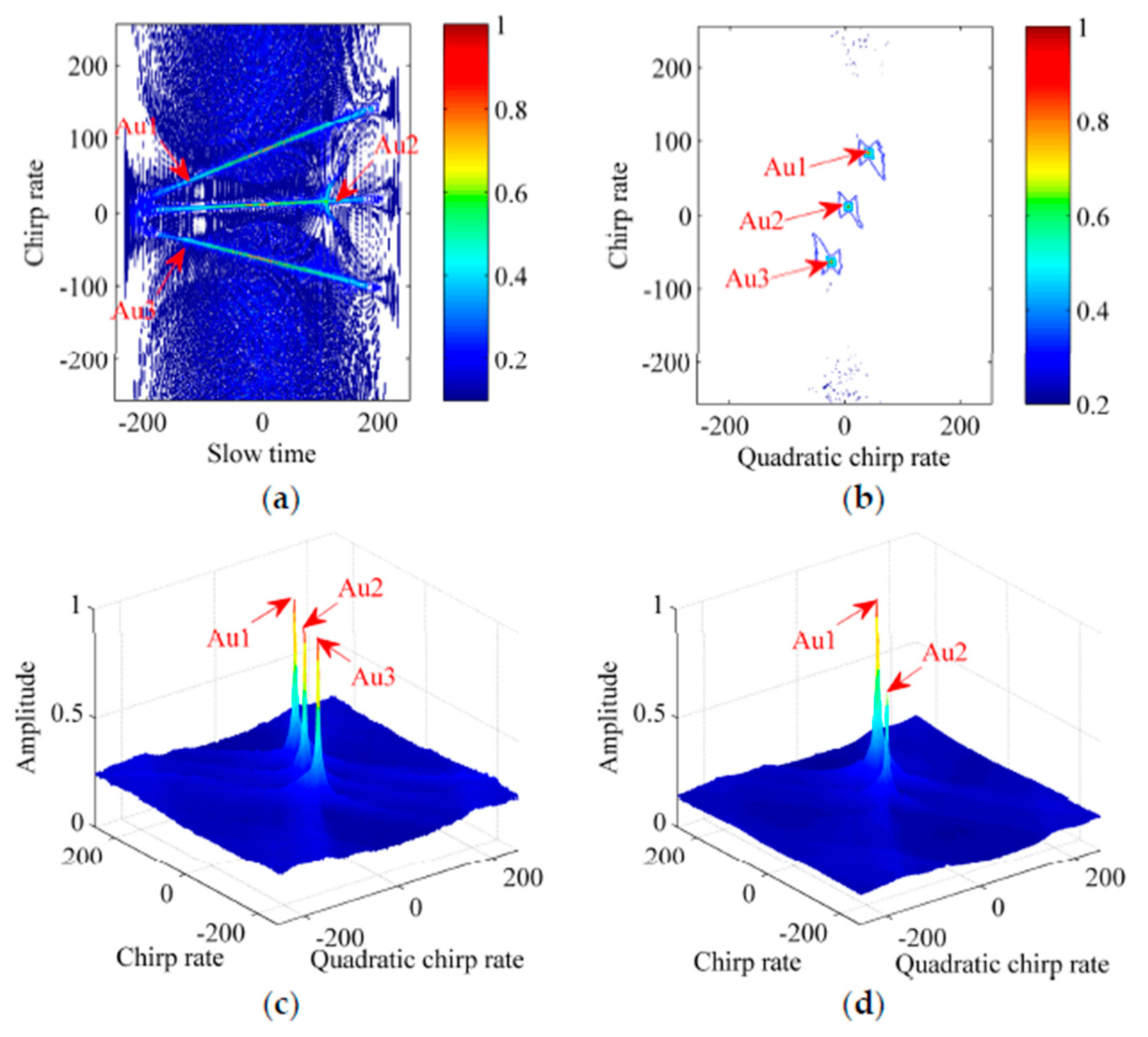
3.1. Principle of the ICPBAF
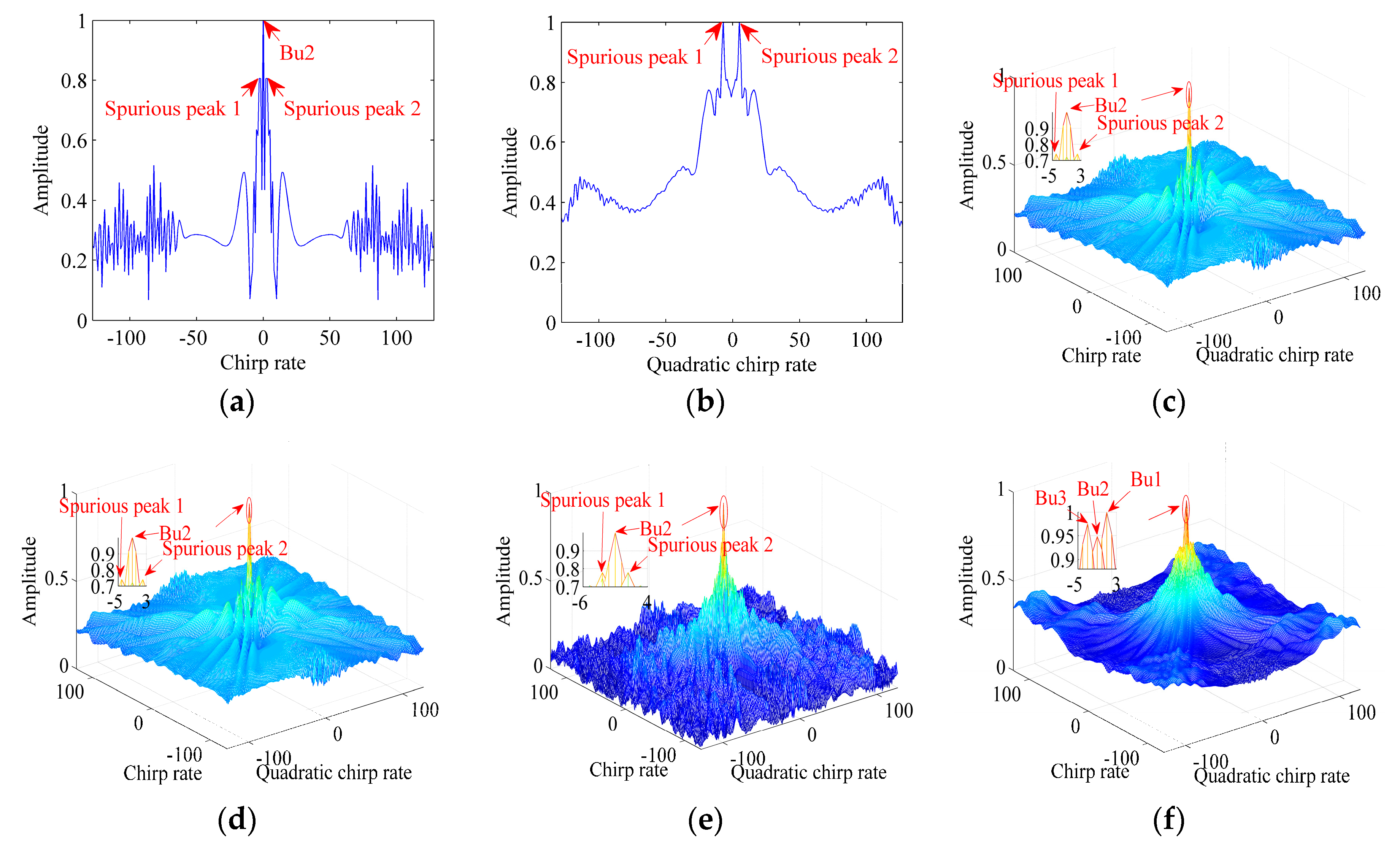
3.2. Cross Term Characteristic Analysis
4. Performance Analysis of the ICPBAF
4.1. Computational Cost Analysis
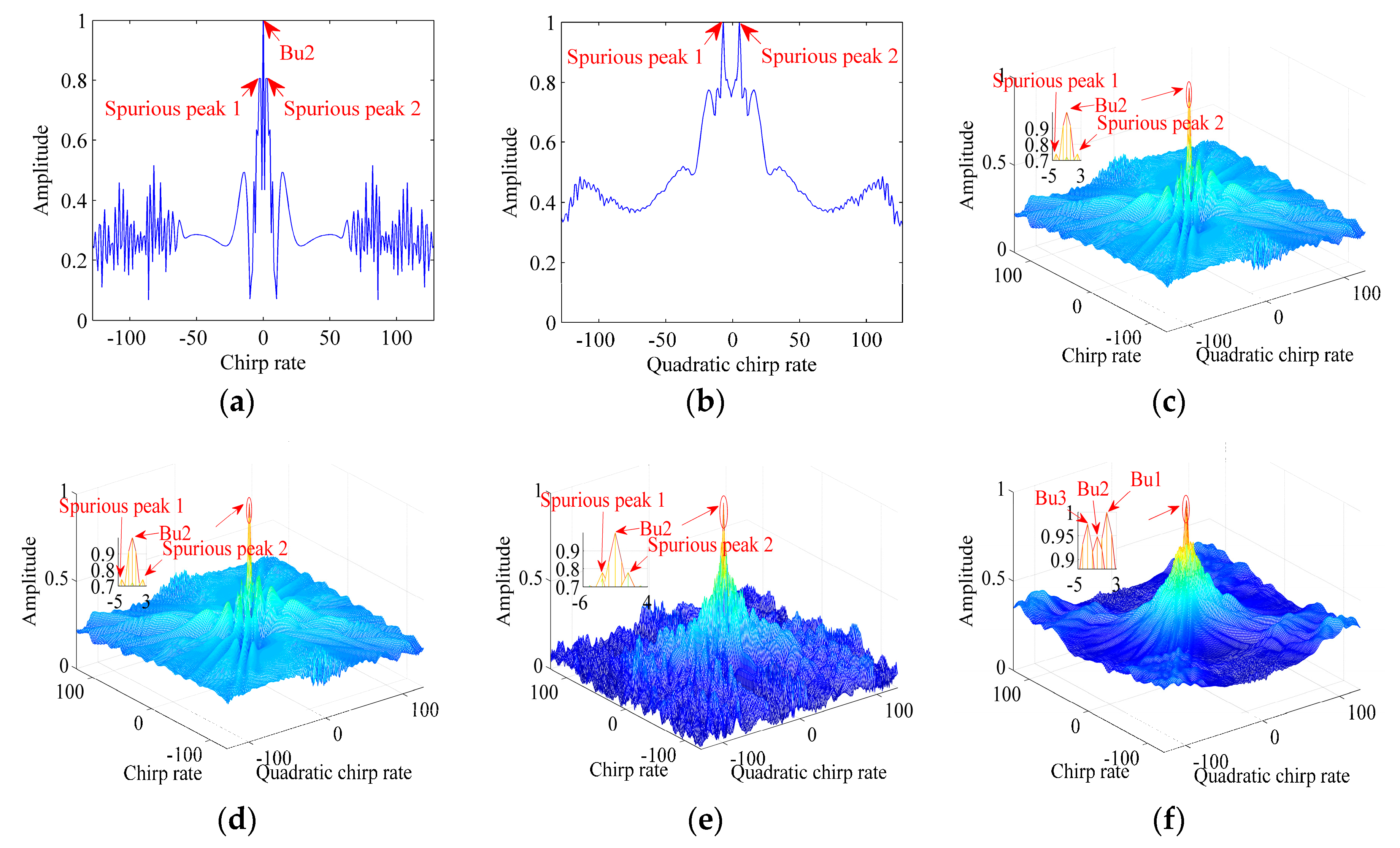
4.2. Cross Term Suppression Analysis
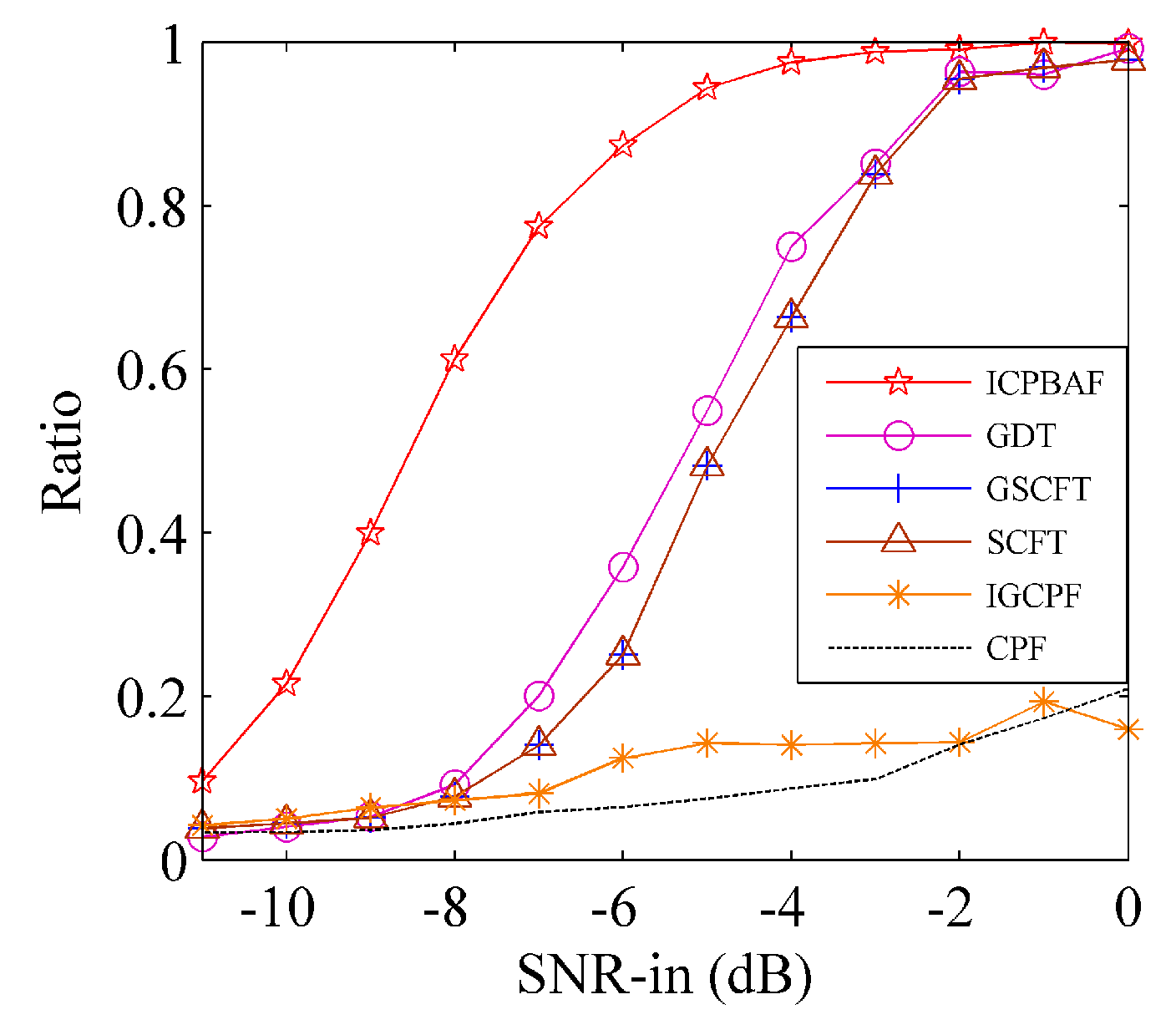
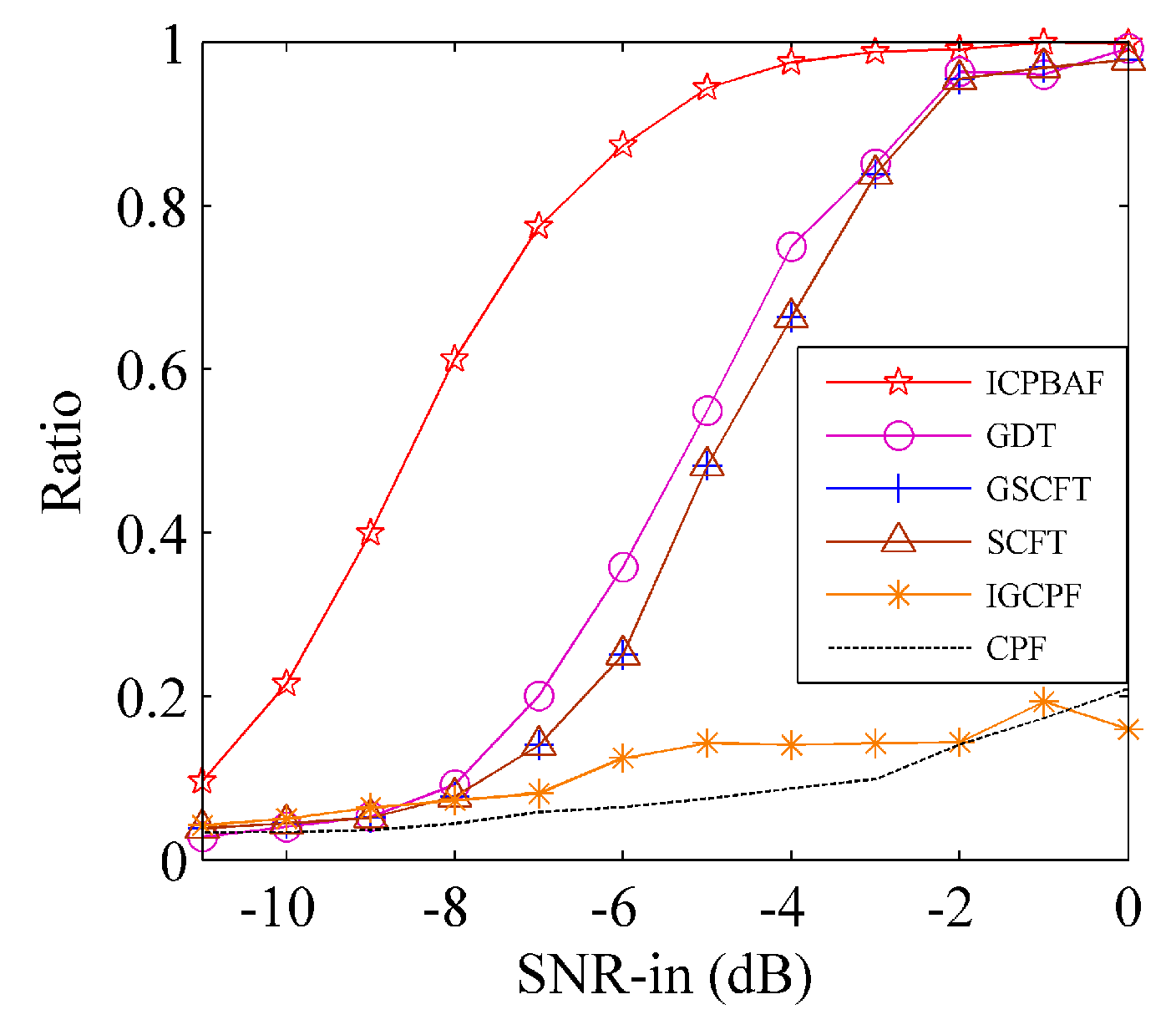
4.3. Anti-Noise Performance Analysis
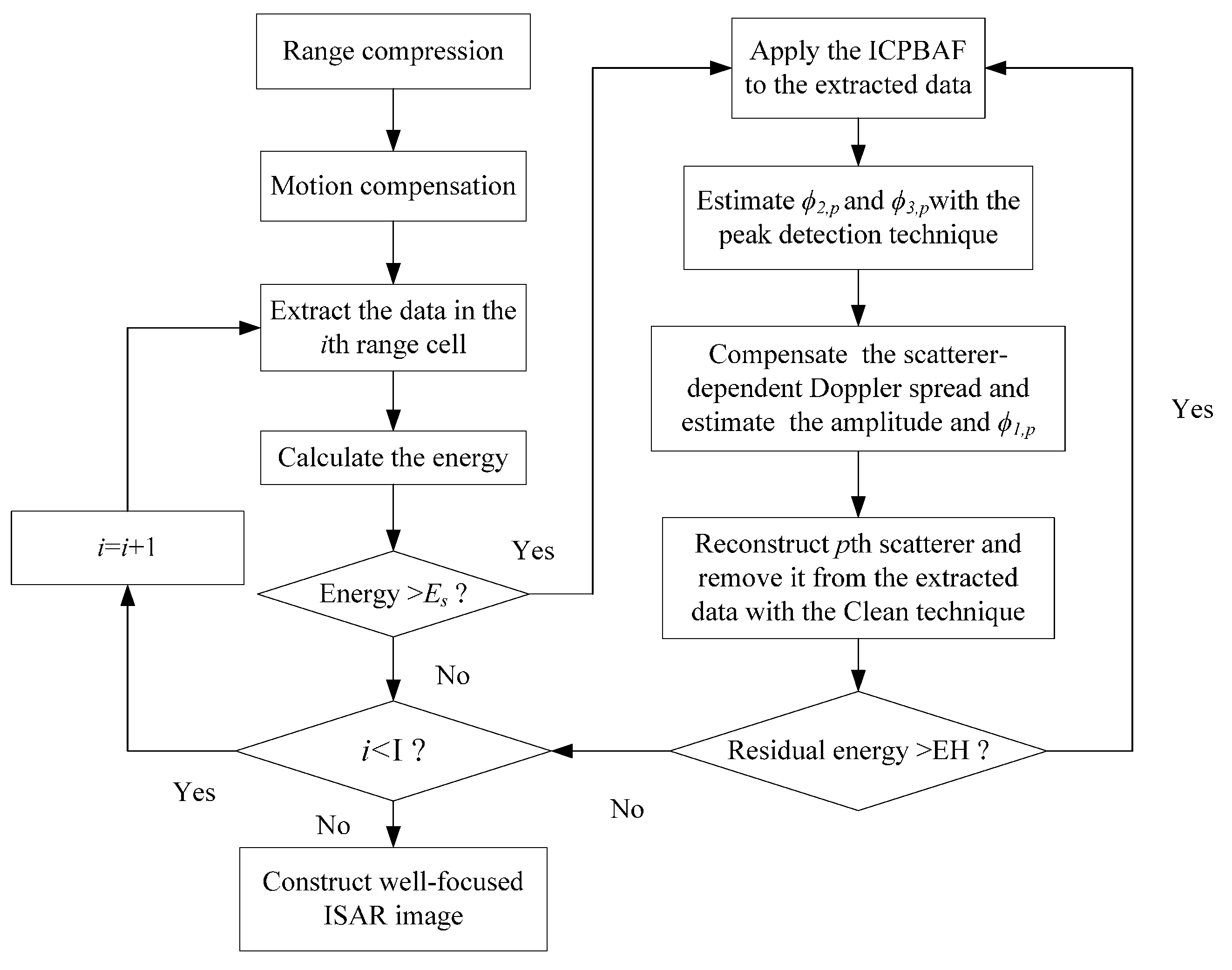
5. RID ISAR Imaging Algorithm Based on the ICPBAF
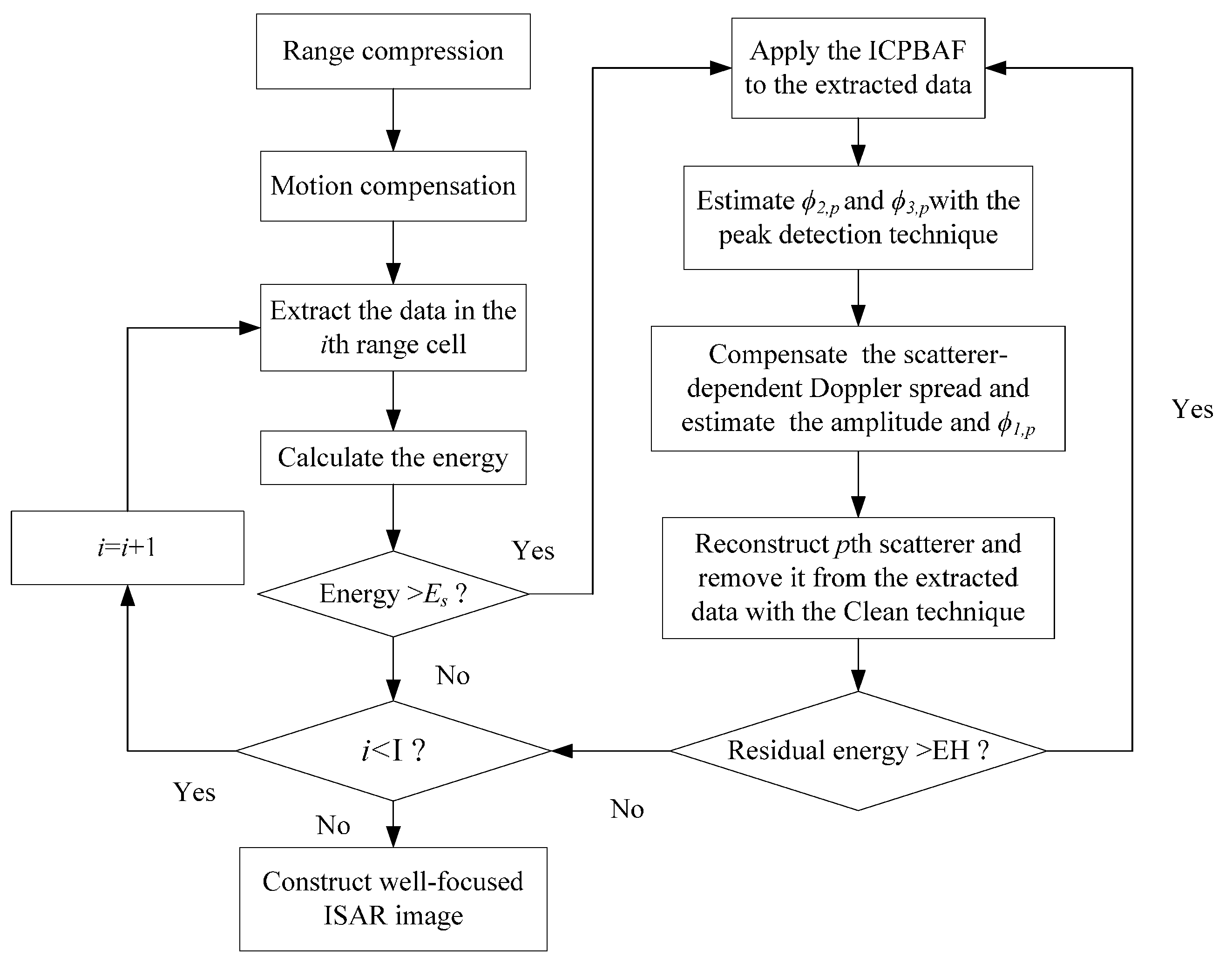
- Step 1:
- Complete the range compression for radar echoes with the matched filter (where , and denote the fast time, pulse width and frequency modulation rate, respectively).
- Step 2:
- Step 3:
- Extract the data in the i-th range cell.
- Step 4:
- Step 5:
- Step 6:
- Dechirp with , and then estimate and via the FFT and peak detection technique.where and denote estimations of the centroid frequency and amplitude for the pth CPS, respectively. denotes the peak value after the FFT.
- Step 7:
- Eliminate the estimated p-th CPS from the original signalwhere denotes the narrowband filter with the bandwidth (can be determined based on the resolution).
- Step 8:
- Step 9:
- If , set i = i +1 and repeat Steps 3–8 until i = I.
6. Verification of the ICPBAF-Based RID ISAR Imaging Algorithm
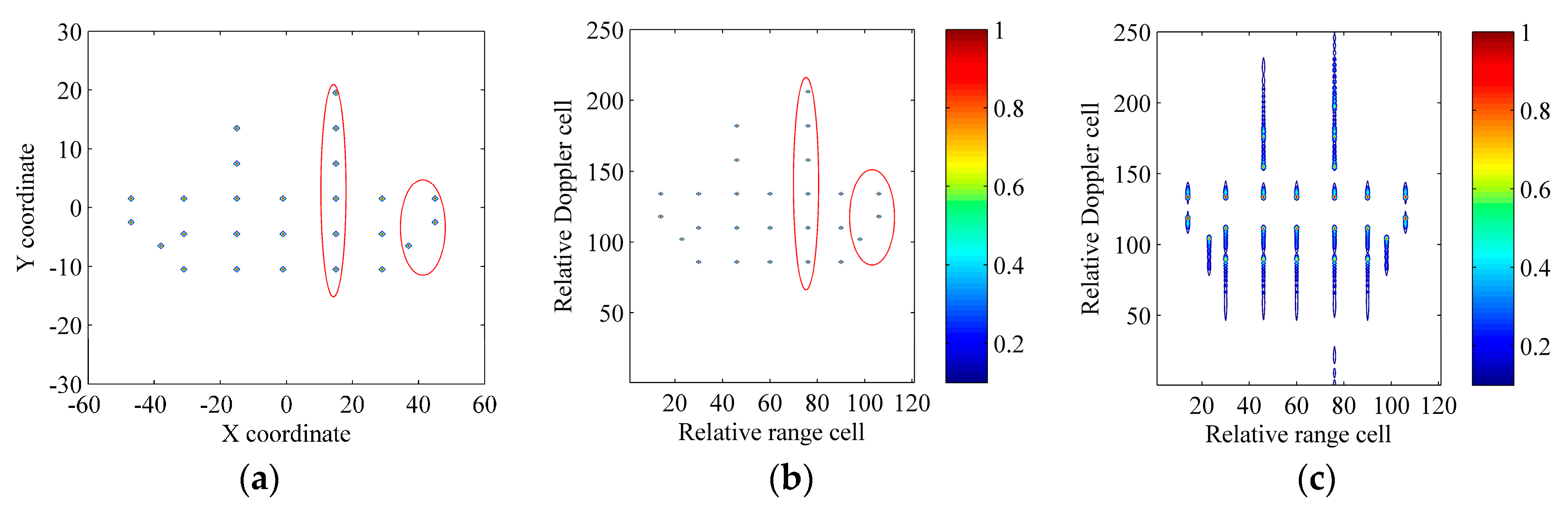
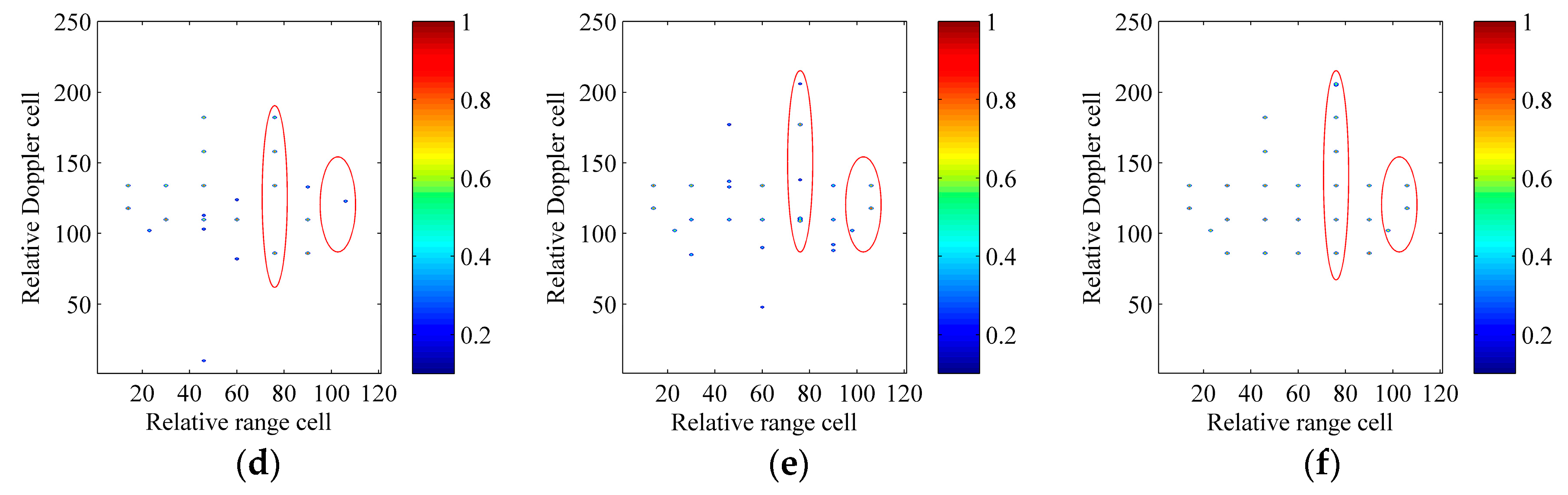
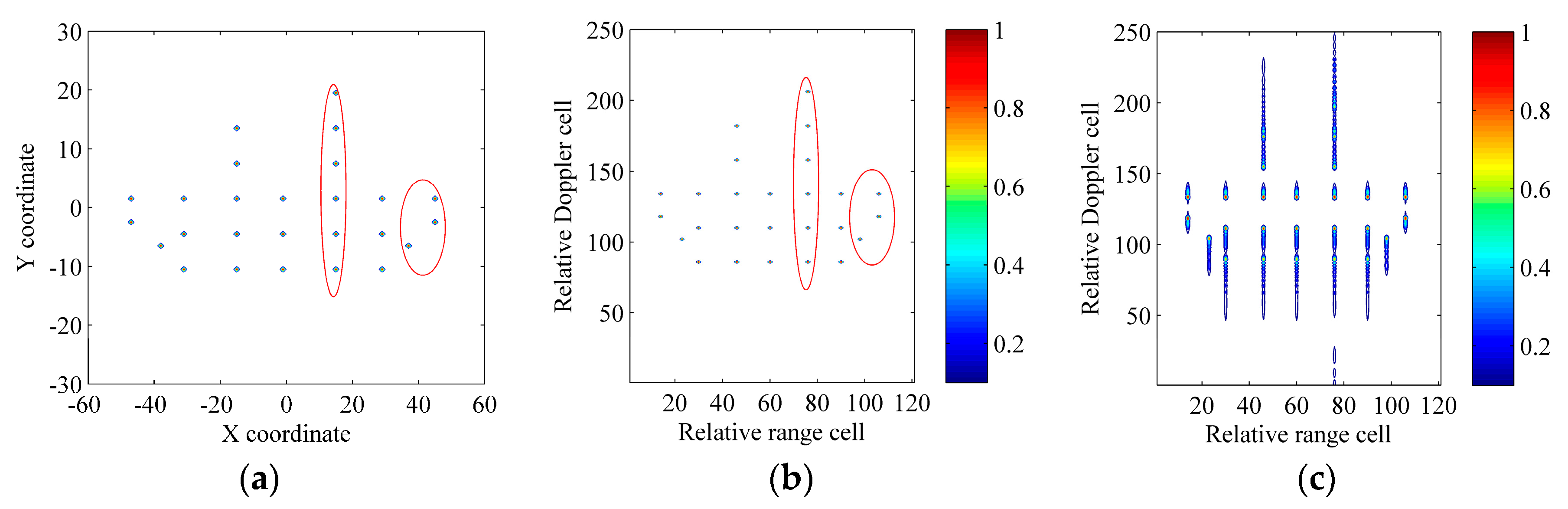
6.1. Verification with the Synthetic Model
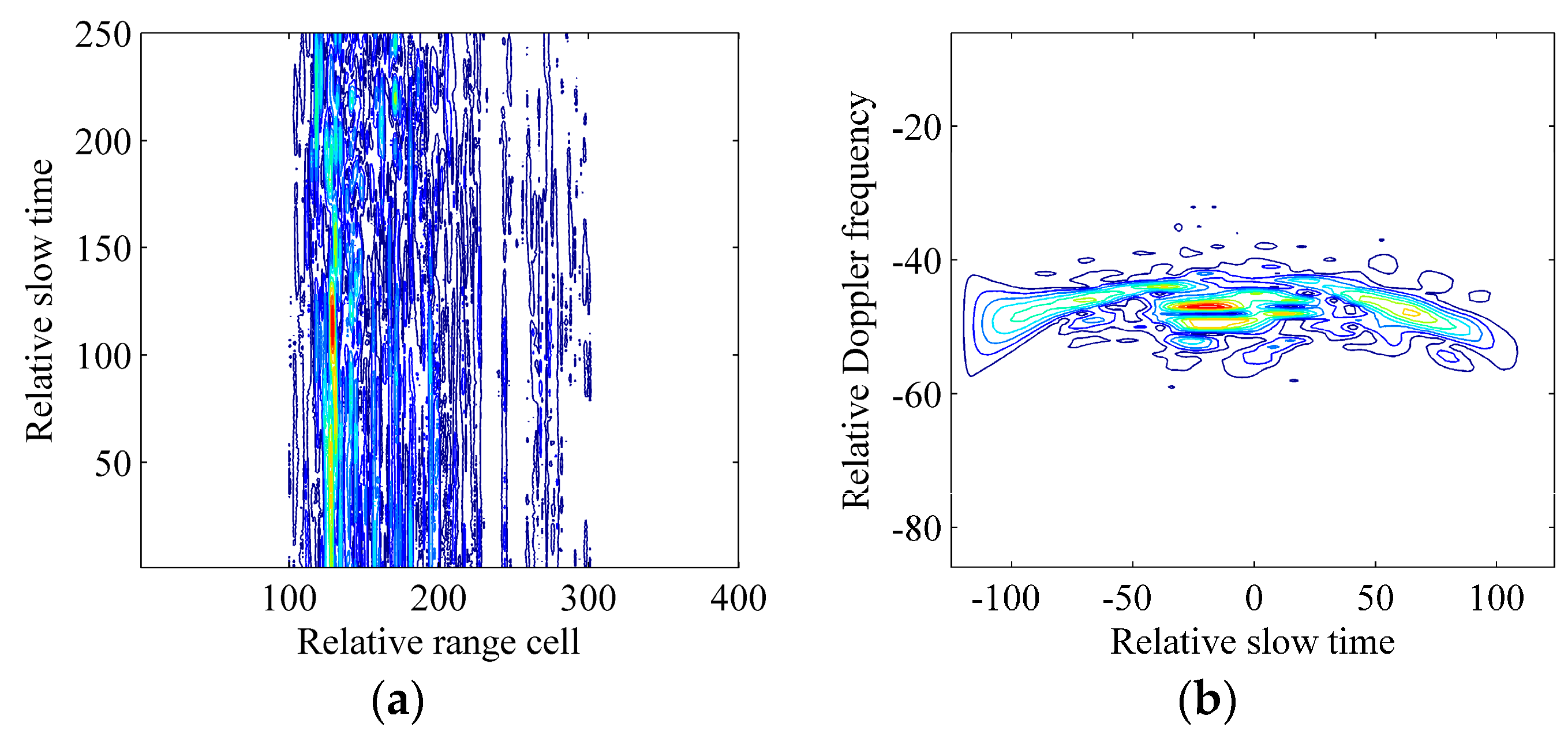
6.2. Verification with Real Radar Data
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Prickett, M.J.; Chen, C.C. Principles of inverse synthetic aperture radar/ ISAR/imaging. In Proceedings of the Electronics and Aerospace Systems Conference, Arlington, VA, USA, 29 September–1 October 1980.
- Soumekh, M. Synthetic Aperture Radar Signal Processing; Wiley: New York, NY, USA, 1999. [Google Scholar]
- Berizzi, F.; Mese, E.; Diania, M.; Martorella, M. High-resolution ISAR imaging of maneuvering targets by means of the range instantaneous Doppler technique: Modeling and performance analysis. IEEE Trans. Image Process. 2001, 10, 1880–1890. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Abdelkader, A.; Zhao, B.; Wang, J. ISAR imaging of maneuvering targets based on the modified discrete polynomial-phase transform. Sensors 2015, 15, 22401–22418. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Kasilingam, D. Global range alignment for ISAR. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 351–357. [Google Scholar] [CrossRef]
- Xing, M.; Wu, R.; Lan, J.; Bao, Z. Migration through resolution cell compensation in ISAR imaging. IEEE Geosci. Remote Sens. Lett. 2004, 1, 141–144. [Google Scholar] [CrossRef]
- Wahl, D.E.; Eichel, P.H.; Ghigetia, D.C. Phase gradient autofocus-a robust tool for high resolution SAR phase correction. IEEE Trans. Aerosp. Electron. Syst. 1994, 30, 827–835. [Google Scholar] [CrossRef]
- Xing, M.; Wu, R.; Li, Y.; Bao, Z. New ISAR imaging algorithm based on modified Wigner Ville distribution. IET Radar Sonar Navig. 2008, 3, 70–80. [Google Scholar] [CrossRef]
- Lv, X.; Xing, M.; Wang, C.; Zhang, S. ISAR imaging of maneuvering targets based on the range centroid Doppler technique. IEEE Trans. Image Process. 2010, 19, 141–153. [Google Scholar] [PubMed]
- Lv, X.; Bi, G.; Wang, C.; Xing, M. Lv’s distribution: Principle, implementation, properties, and performance. IEEE Trans. Signal Process. 2011, 59, 3576–3591. [Google Scholar] [CrossRef]
- Guo, X.; Sun, H.; Wang, S.; Liu, G. Comments on Discrete Chirp-Fourier Transform and its Application to Chirp Rate Estimation. IEEE Trans. Signal Process. 2002, 50, 3115. [Google Scholar]
- Zheng, J.; Su, T.; Zhu, W.; Zhang, L.; Liu, Z.; Liu, Q. ISAR imaging of nonuniformly rotating target based on a fast parameter estimation algorithm of cubic phase signal. IEEE Trans. Geosci. Remote Sens. 2015, 53, 4727–4740. [Google Scholar] [CrossRef]
- Bai, X.; Tao, R.; Wang, Z.; Wang, Y. ISAR imaging of a ship target based on parameter estimation of multicomponent quadratic frequency-modulated signals. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1418–1429. [Google Scholar] [CrossRef]
- Wu, L.; Wei, X.; Yang, D.; Wang, H.; Li, X. ISAR imaging of targets with complex motion based on discrete chirp Fourier transform for cubic chirps. IEEE Trans. Geosci. Remote Sens. 2012, 50, 4201–4212. [Google Scholar] [CrossRef]
- Nguyen, N.; Liu, Q.H. The regular Fourier matrices and nonuniform fast Fourier transforms. SIAM J. Sci. Comput. 1999, 21, 283–293. [Google Scholar] [CrossRef]
- Liu, Q.H.; Nguyen, N.; Tang, X.Y. Accurate algorithms for nonuniform fast forward and inverse Fourier transforms and their applications. Proc. IEEE Geosci. Remote Sens. Symp. 1998, 1, 288–290. [Google Scholar]
- Barbarossa, S.; Scaglione, A.; Giannakis, G.B. Product high-order ambiguity function for multicomponent polynomial-phase signal modeling. IEEE Trans. Signal Process. 1998, 46, 691–708. [Google Scholar] [CrossRef]
- Wang, Y.; Jiang, Y. Inverse synthetic aperture radar imaging of maneuvering target based on the product generalized cubic phase function. IEEE Geosci. Remote Sens. Lett. 2011, 8, 958–962. [Google Scholar] [CrossRef]
- Wang, Y.; Lin, Y. ISAR imaging of non-uniformly rotating target via range-instantaneous-Doppler-derivatives algorithm. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 167–176. [Google Scholar] [CrossRef]
- Zheng, J.; Liu, H.; Liao, G.; Su, T.; Liu, Z.; Liu, Q.H. ISAR imaging of targets with complex motions based on a noise-resistant parameter estimation algorithm without nonuniform axis. IEEE Sens. J. 2016, 16, 2509–2518. [Google Scholar] [CrossRef]
- Li, D.; Gui, X.; Liu, H.; Su, J.; Xiong, H. An ISAR imaging algorithm for maneuvering targets with low SNR based on parameter estimation of multicomponent quadratic FM signals and nonuniform FFT. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 5688–5702. [Google Scholar] [CrossRef]
- Zheng, J.; Liu, H.; Liao, G.; Su, T.; Liu, Z.; Liu, Q.H. ISAR Imaging of Nonuniformly Rotating Targets Based on Generalized Decoupling Technique. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 520–532. [Google Scholar] [CrossRef]
- O’Shea, P. A new technique for instantaneous frequency rate estimation. IEEE Signal Process. Lett. 2002, 9, 251–252. [Google Scholar] [CrossRef] [Green Version]
- O’Shea, P. A fast algorithm for estimating the parameters of a quadratic FM signal. IEEE Trans. Signal Process. 2004, 52, 385–393. [Google Scholar] [CrossRef] [Green Version]
- Simeunović, M.; Djurović, I. Non-uniform sampled cubic phase function. Signal Process. 2014, 101, 99–103. [Google Scholar] [CrossRef]
- Wang, Y.; Kang, J.; Jiang, Y. ISAR imaging of maneuvering target based on the local polynomial Wigner distribution and integrated high-order ambiguity function for cubic phase signal model. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 2971–2991. [Google Scholar] [CrossRef]
- Farquharson, M.; O’Shea, P. Extending the performance of the cubic phase function algorithm. IEEE Trans. Signal Process. 2007, 55, 4767–4774. [Google Scholar] [CrossRef] [Green Version]
- Zheng, J.; Su, T.; Liao, G.; Liu, H.; Liu, Z.; Liu, Q.H. ISAR imaging for fluctuating ships based on a fast bilinear parameter estimation algorithm. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 3954–3966. [Google Scholar] [CrossRef]
- Chen, X.; Guan, J.; Liu, N.; He, Y. Maneuvering target detection via radon-Fractional Fourier transform-based long-time coherent integration. IEEE Trans. Signal Process. 2014, 62, 939–953. [Google Scholar] [CrossRef]
- Wang, P.; Li, H.; Djurović, I.; Himed, B. Integrated cubic phase function for linear FM signal analysis. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 963–977. [Google Scholar] [CrossRef]
- Zheng, J.; Su, T.; Liu, Q.H.; Zhang, L.; Zhu, W. Fast parameter estimation algorithm for cubic phase signal based on quantifying effects of Doppler frequency shift. Prog. Electromagn. Res. 2013, 142, 57–74. [Google Scholar] [CrossRef]
- Peleg, S.; Porat, B. The Cramer-Rao lower bound for signals with constant amplitude and polynomial phase. IEEE Trans. Aerosp. Electron. Syst. 1998, 34, 1070–1084. [Google Scholar] [CrossRef]
- Peleg, S.; Porat, B. Linear FM signal parameter estimation from discrete-time observations. IEEE Trans. Aerosp. Electron. Syst. 1991, 27, 607–616. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | CPF | IGCPF | SCFT-Based Algorithm |
|---|---|---|---|
| Computational cost | |||
| Algorithm | GSCFT-based algorithm | GDT-based algorithm | ICPBAF |
| Computational cost |
| Carrier Frequency | 15 GHz | Wave Length | 0.02 m |
|---|---|---|---|
| Bandwidth | 100 MHz | Fast time sampling frequency | 200 MHz |
| PRF | 125 Hz | Echo pulses | 250 |
| Translational motions | Velocity | Acceleration | Acceleration rate |
| 24 m/s | 2 m/s2 | 1 m/s3 | |
| Effective rotational motions | Angular velocity | acceleration | acceleration rate |
| 0.01 rad/s | 0.005 rad/s2 | 0.01 rad/s3 |
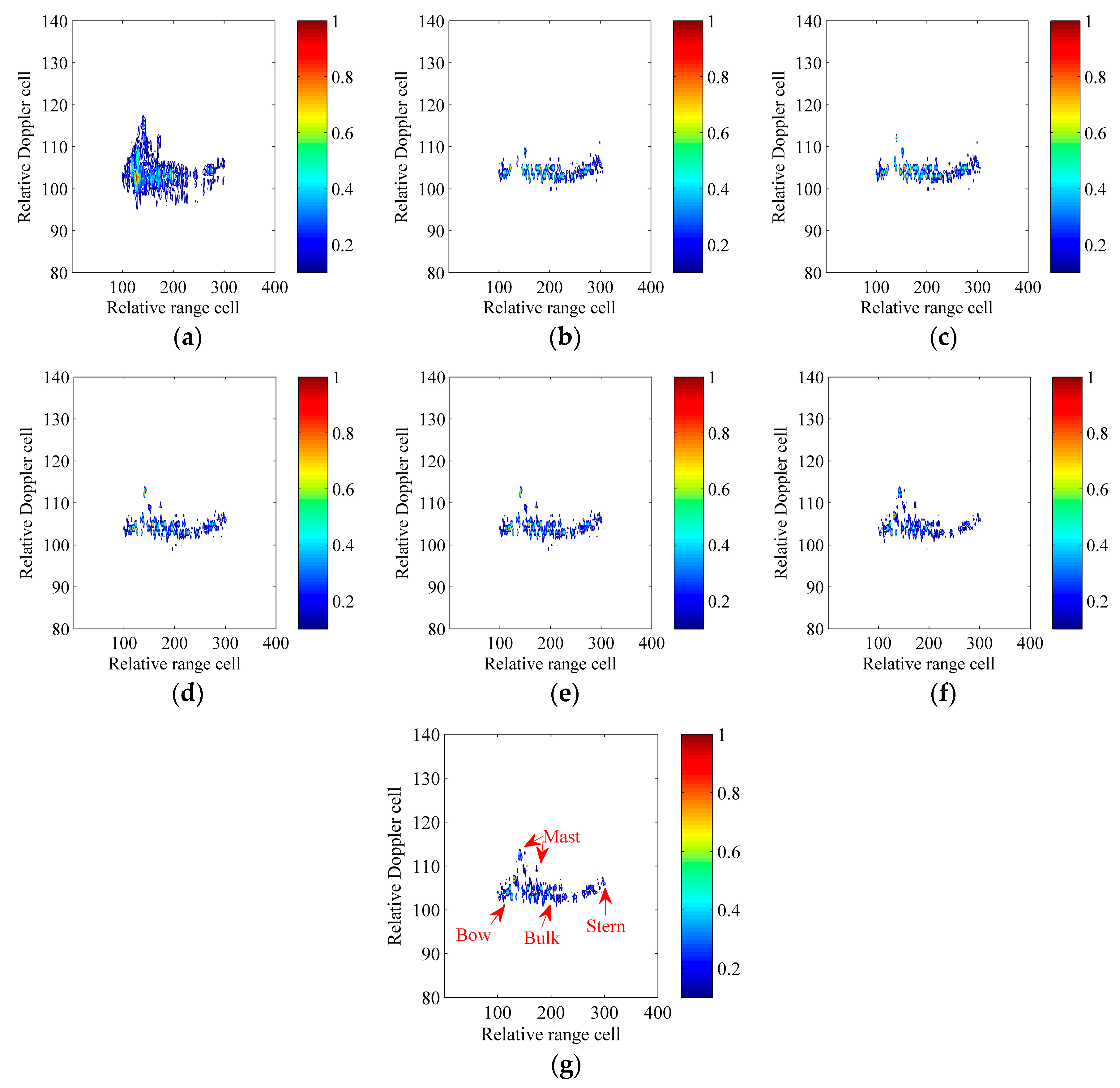
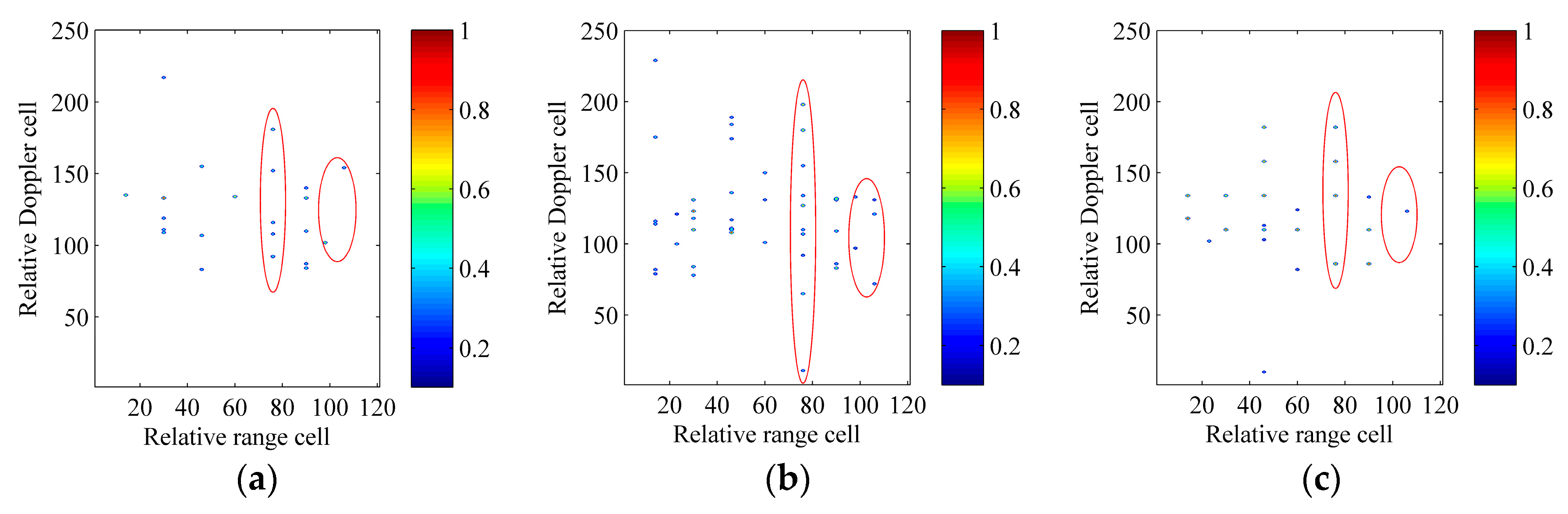
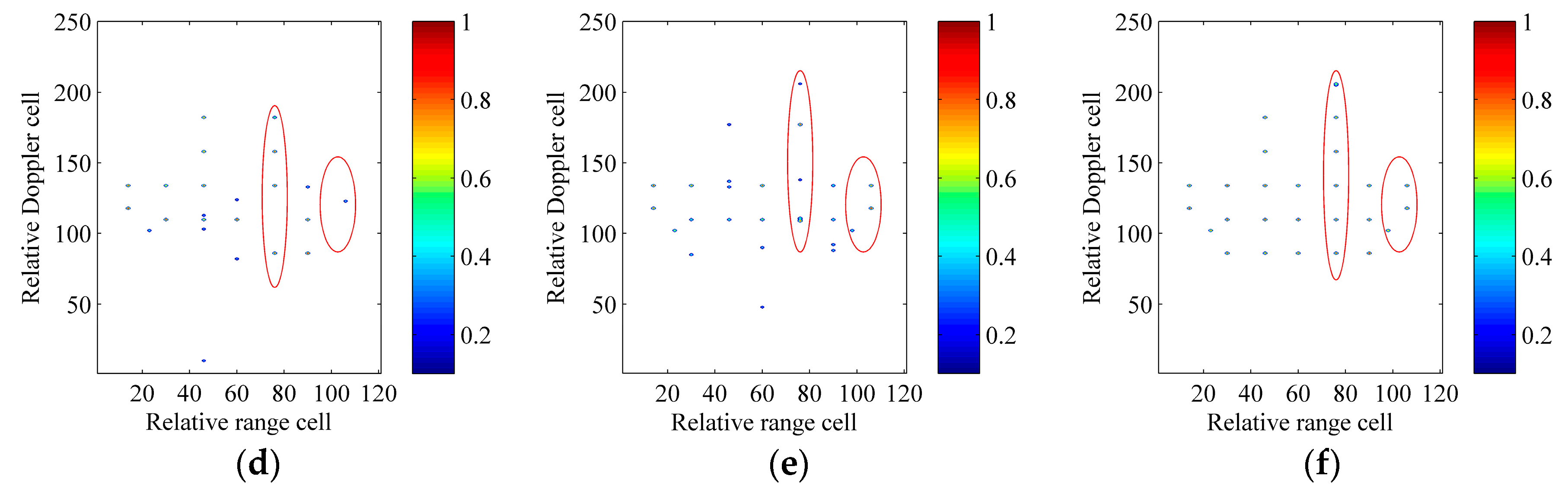
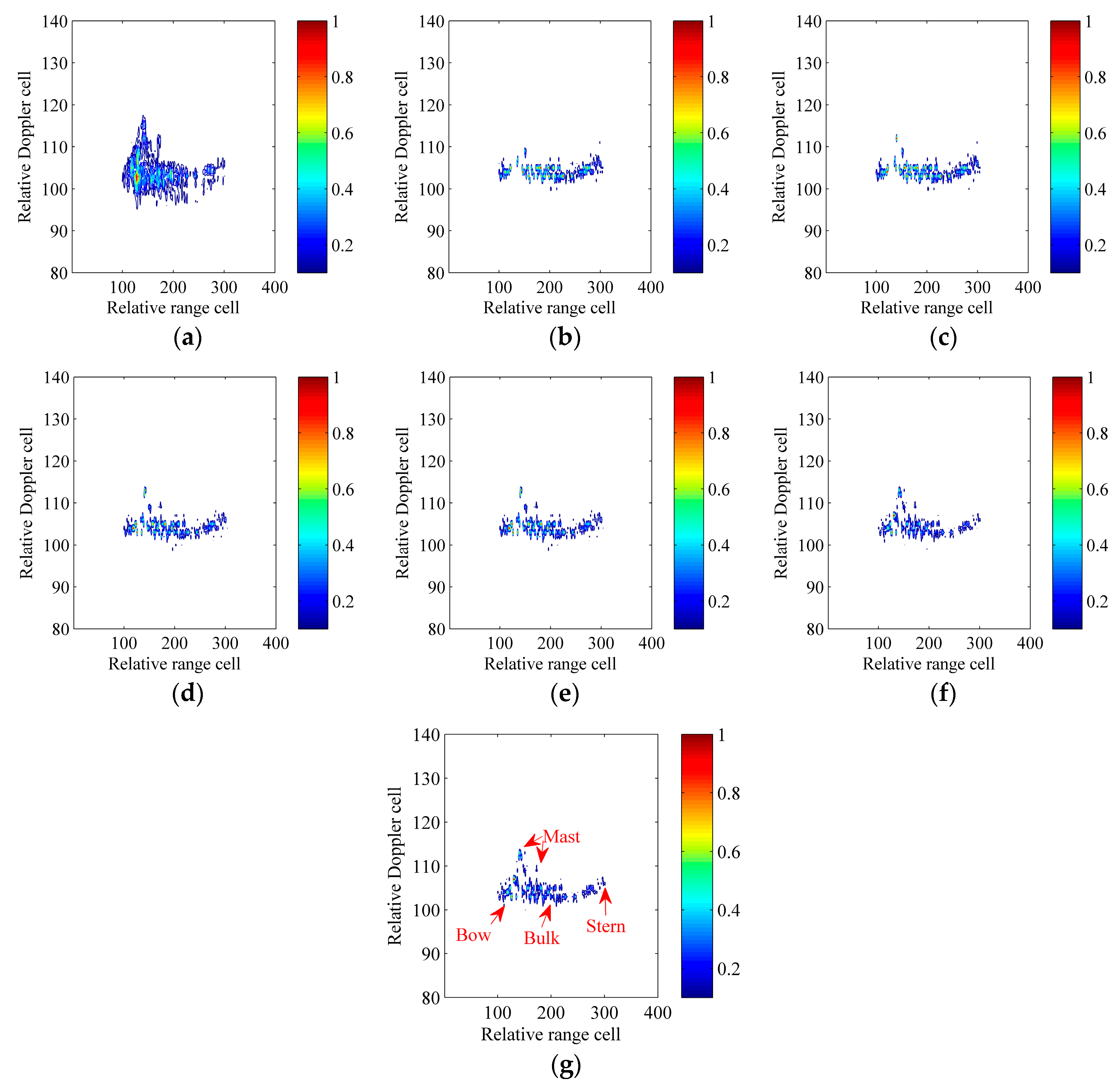
| Figure 8a (CPF) | Figure 8b (IGCPF) | Figure 8c (SCFT) | |
|---|---|---|---|
| Entropies | 7.262 | 10.1713 | 5.2378 |
| Figure 8d (GSCFT) | Figure 8e (GDT) | Figure 8f (ICPBAF) | |
| Entropies | 5.2378 | 4.9776 | 4.5383 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, J.; Liu, H.; Liu, Z.; Liu, Q.H. ISAR Imaging of Ship Targets Based on an Integrated Cubic Phase Bilinear Autocorrelation Function. Sensors 2017, 17, 498. https://doi.org/10.3390/s17030498
Zheng J, Liu H, Liu Z, Liu QH. ISAR Imaging of Ship Targets Based on an Integrated Cubic Phase Bilinear Autocorrelation Function. Sensors. 2017; 17(3):498. https://doi.org/10.3390/s17030498
Chicago/Turabian StyleZheng, Jibin, Hongwei Liu, Zheng Liu, and Qing Huo Liu. 2017. "ISAR Imaging of Ship Targets Based on an Integrated Cubic Phase Bilinear Autocorrelation Function" Sensors 17, no. 3: 498. https://doi.org/10.3390/s17030498