
Optimal Resonant Band Demodulation Based on an Improved Correlated Kurtosis and Its Application in Bearing Fault Diagnosis

Abstract
:1. Introduction
2. Kurtosis and Correlated Kurtosis
2.1. Kurtosis
2.2. Correlated Kurtosis
3. The Proposed Optimal Resonant Band Demodulation Method Based on an Improved Correlated Kurtosis
3.1. Redefinition of Correlated Kurtosis
3.2. An Improved Correlated Kurtosis
3.3. Performance Comparison
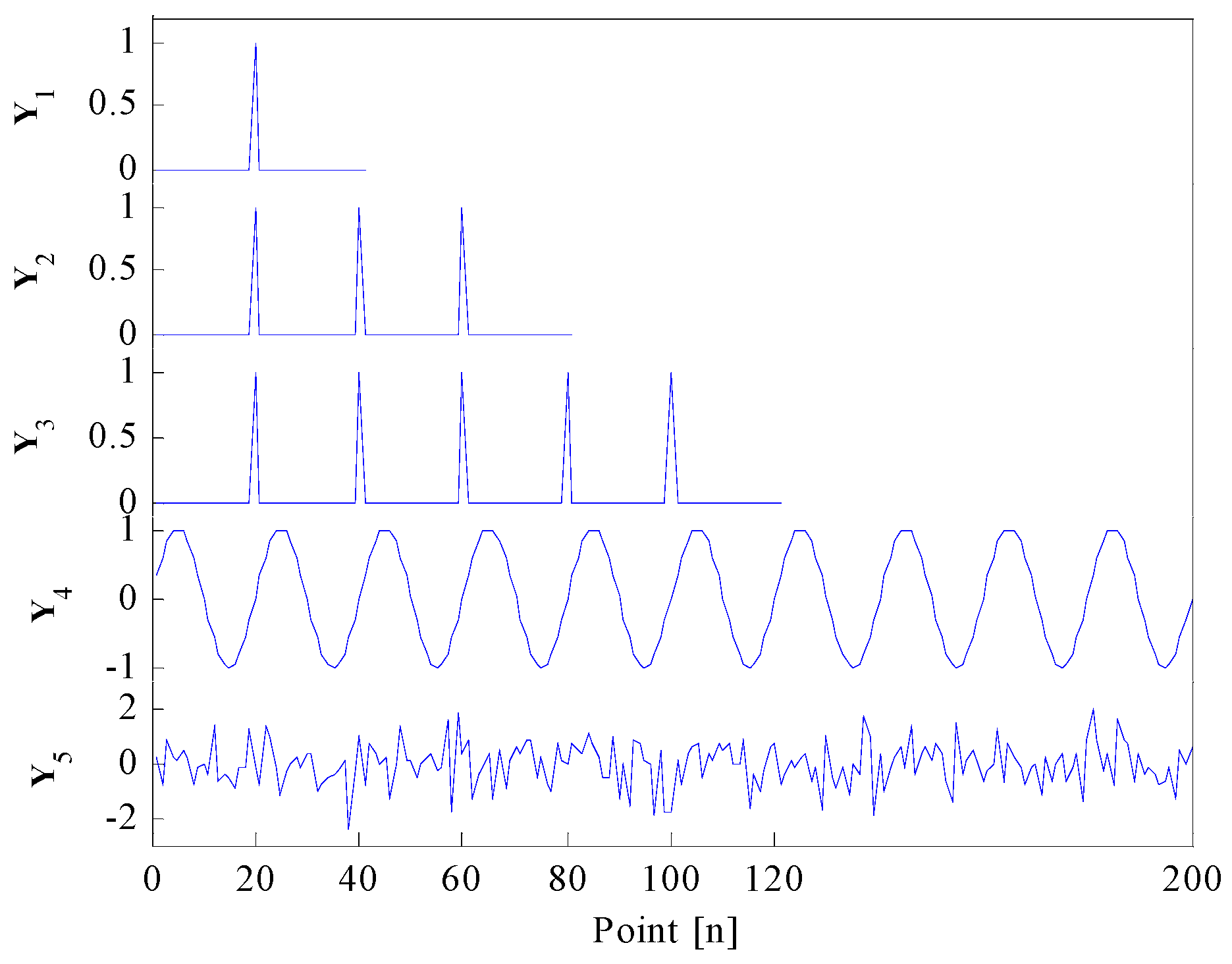
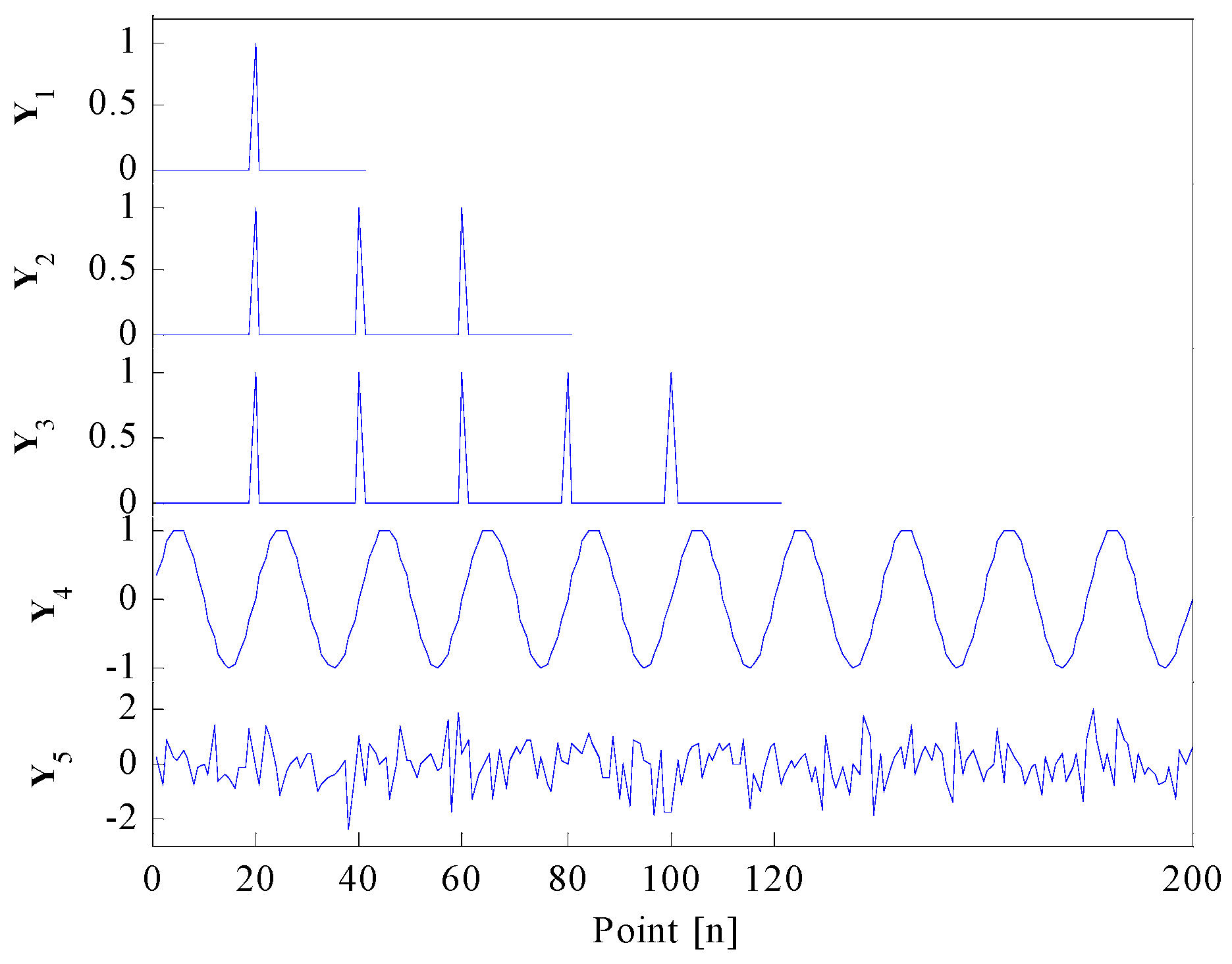
- Signal Y1:
- a unit-impulse function δ(20) and its length equals to 40.
- Signal Y2:
- a Dirac comb function composed by unit-impulse functions δ(20), δ(40) and δ(60), its length equals to 80.
- Signal Y3:
- a Dirac comb function composed by unit-impulse functions δ(20), δ(40), δ(60), δ(80) and δ(100), its length equals to 120.
- Signal Y4:
- a sine function and its length equals to 200.
- Signal Y5:
- a Gaussian noise function and its length equals to 200.
3.4. The Optimal Resonant Band Demodulation
- (1)
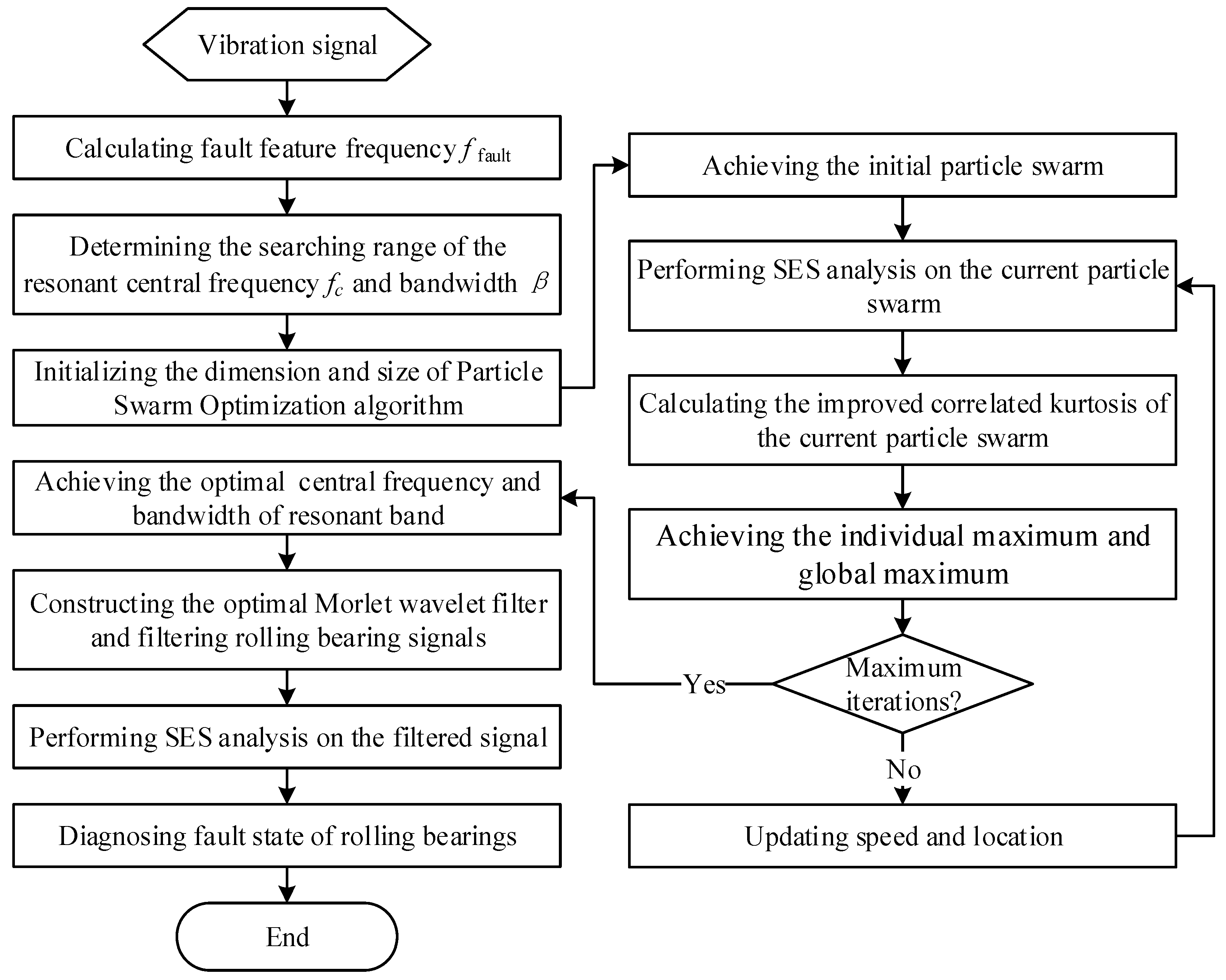
- Calculating the fault feature frequency according to the geometric parameters of the rolling bearing and operation conditions of the mechanical system.
- (2)
- Determining the searching range of the resonant bandwidth. As the band-pass filtered bandwidth should be greater than three times of the fault feature frequency, the searching range of the resonant bandwidth can be set as .
- (3)
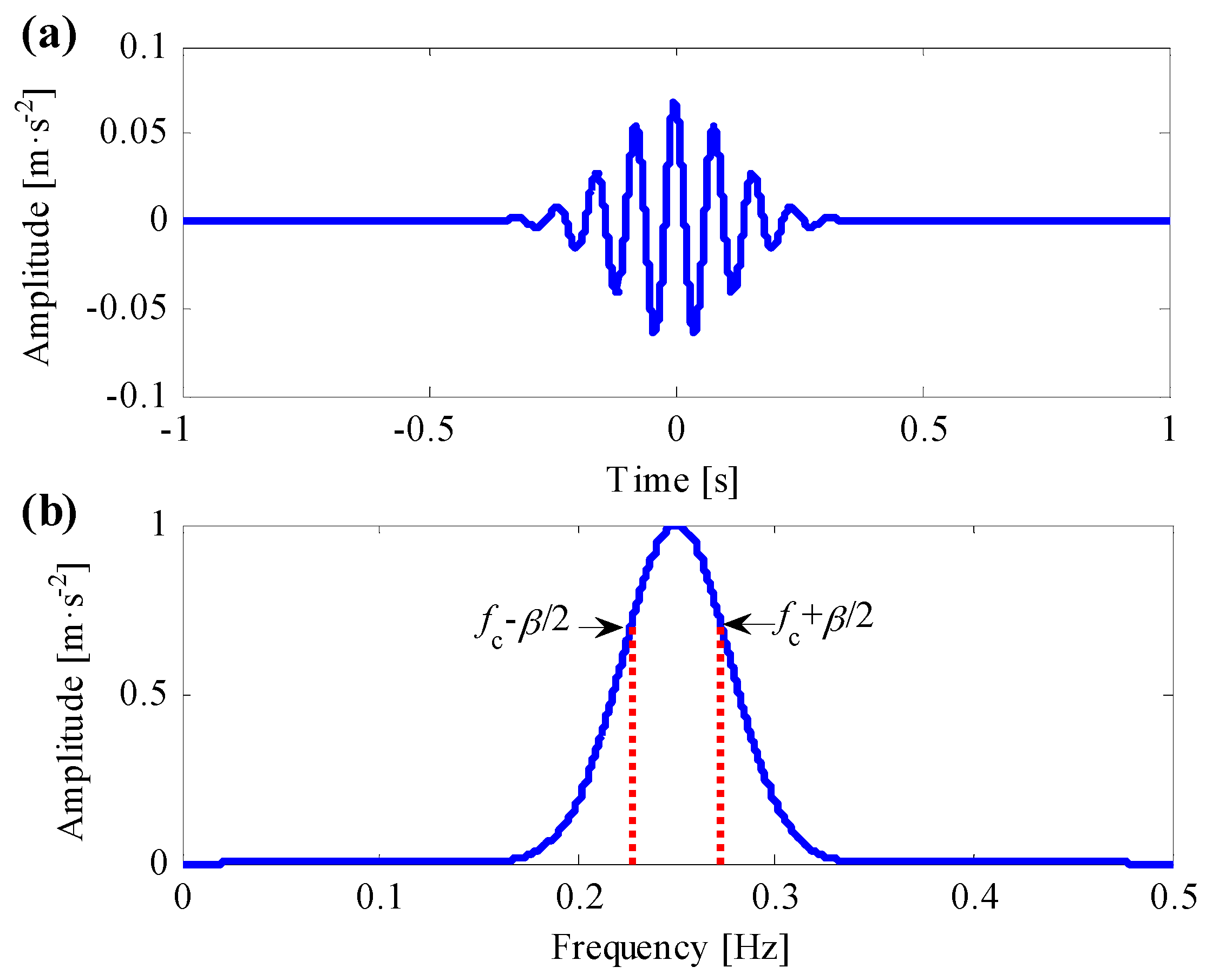
- Determining the searching range of the resonant central frequency. As the filtered range of the Morlet wavelet filter is , the searching range of the resonant central frequency can be set as , where represents the sampling frequency.
- (4)
- Initializing the Particle Swarm Optimization algorithm. The dimension of the particle swarm is set as 2, the size of the particle swarm is set as 30. The initial particle swarm can be achieved in line with the searching settings in step (2) and step (3).
- (5)
- Performing SES analysis on the initial particle swarm, calculating their values of the improved correlated kurtosis and achieving the individual maximum and global maximum.
- (6)
- Updating speed and location of the particle swarm iteratively until the maximum iterations. Achieving the optimal resonant central frequency and bandwidth .
- (7)
- Setting the central frequency of the optimal complex Morlet wavelet filter as , the bandwidth of the optimal complex Morlet wavelet filter as . Achieving the optimal resonant band filtered signal.
- (8)
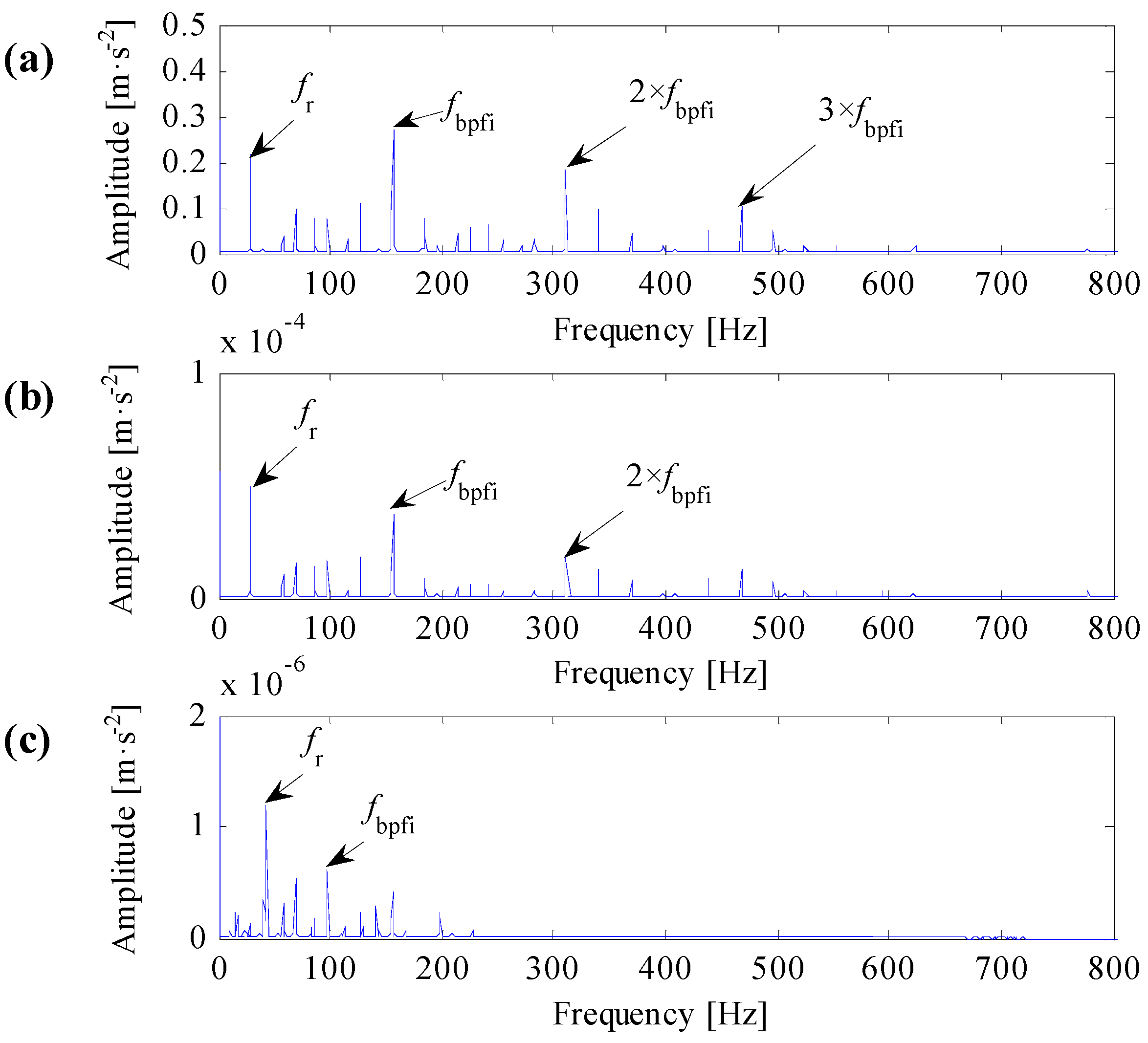
- Performing the SES of the optimal resonant band filtered signal and diagnosing faults of rolling bearings.
4. Analysis
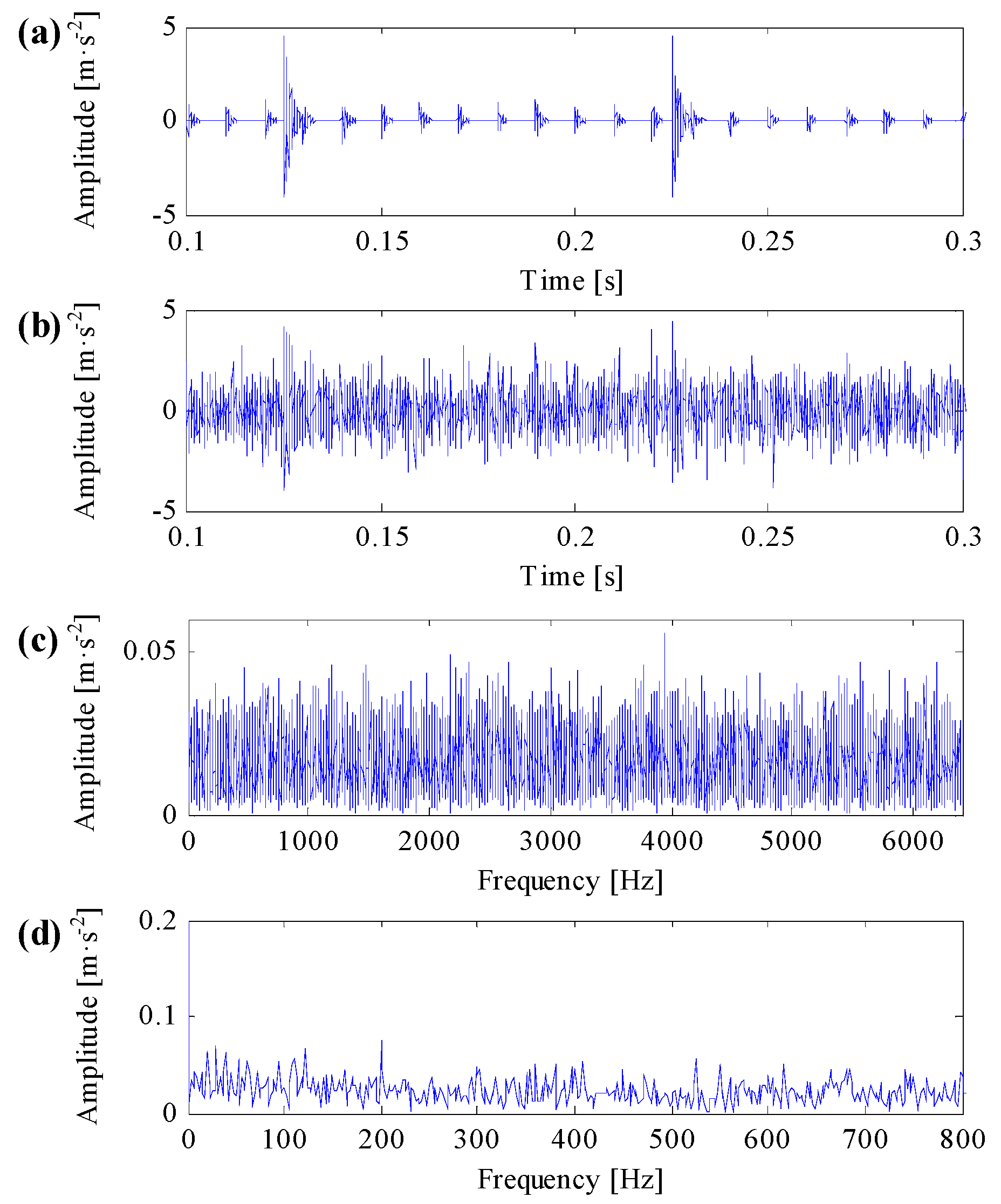
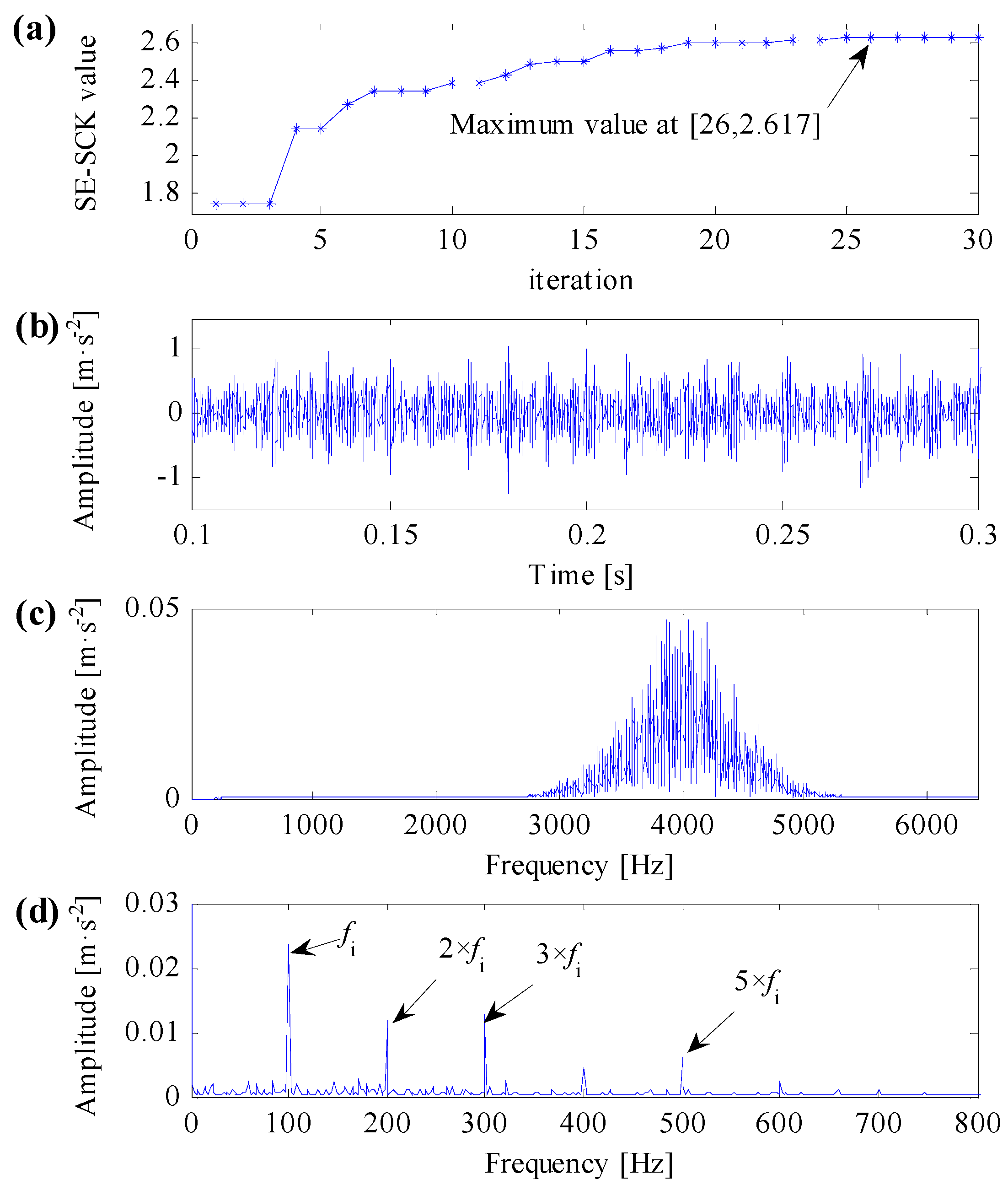
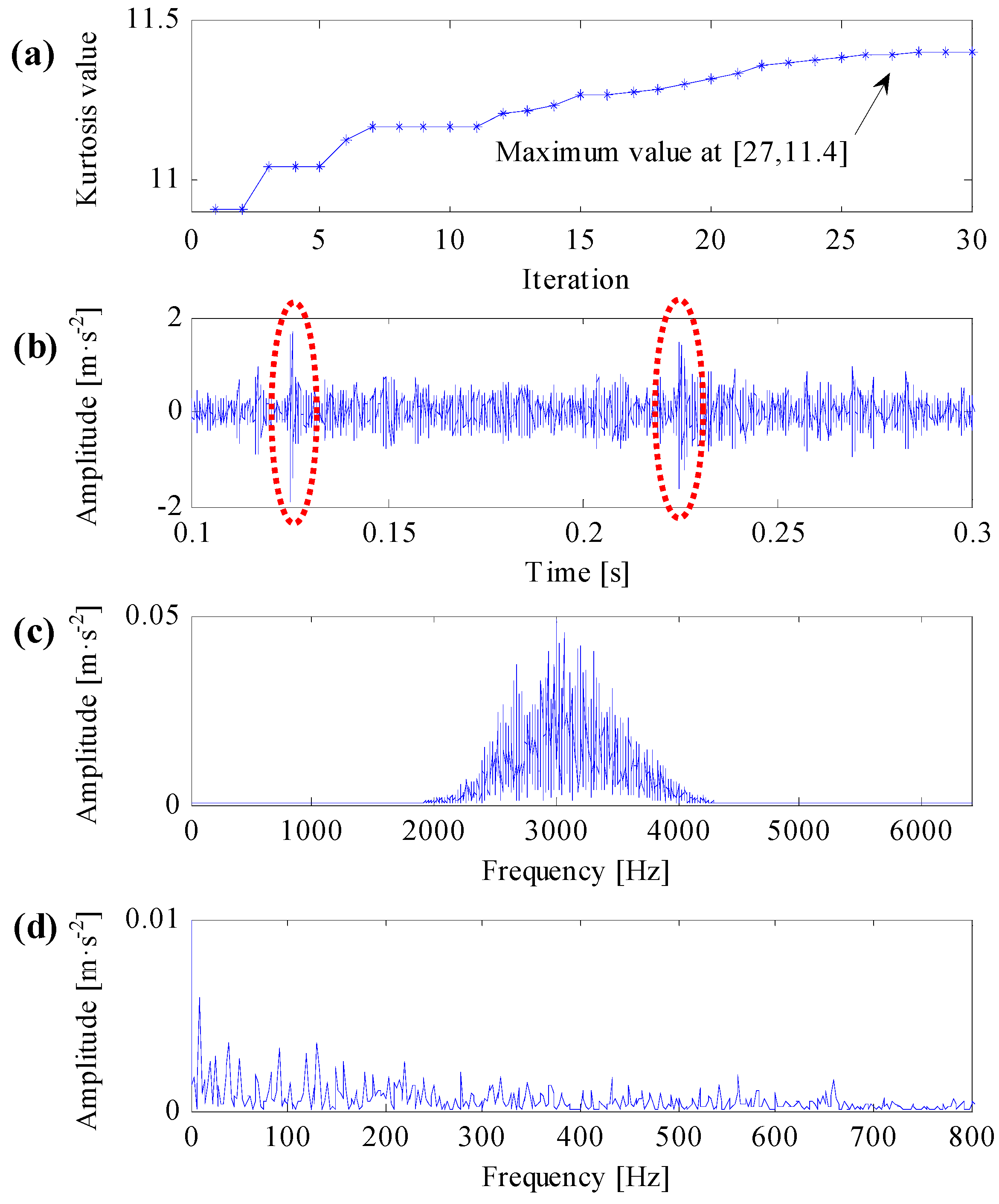
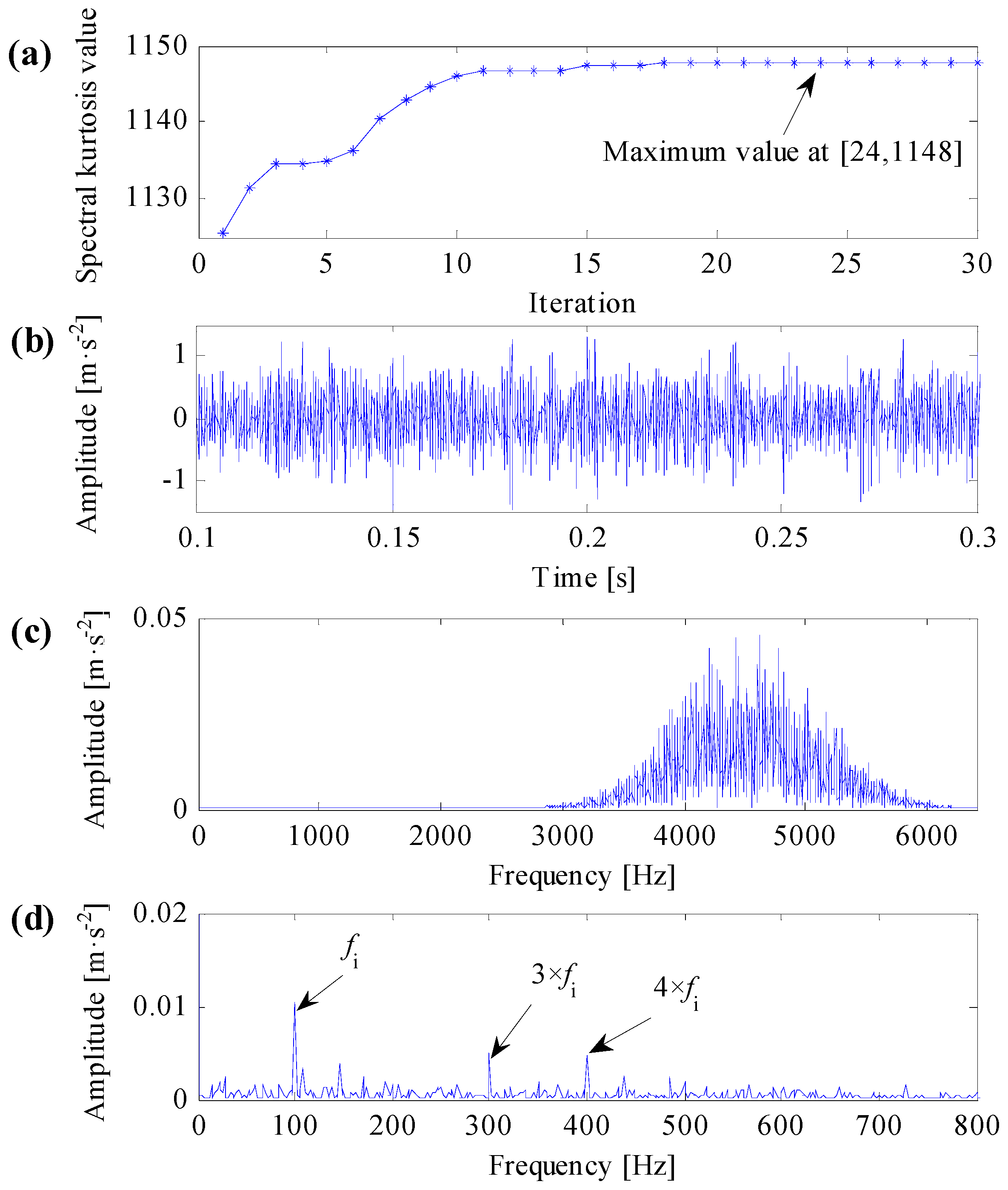
4.1. Simulation Analysis
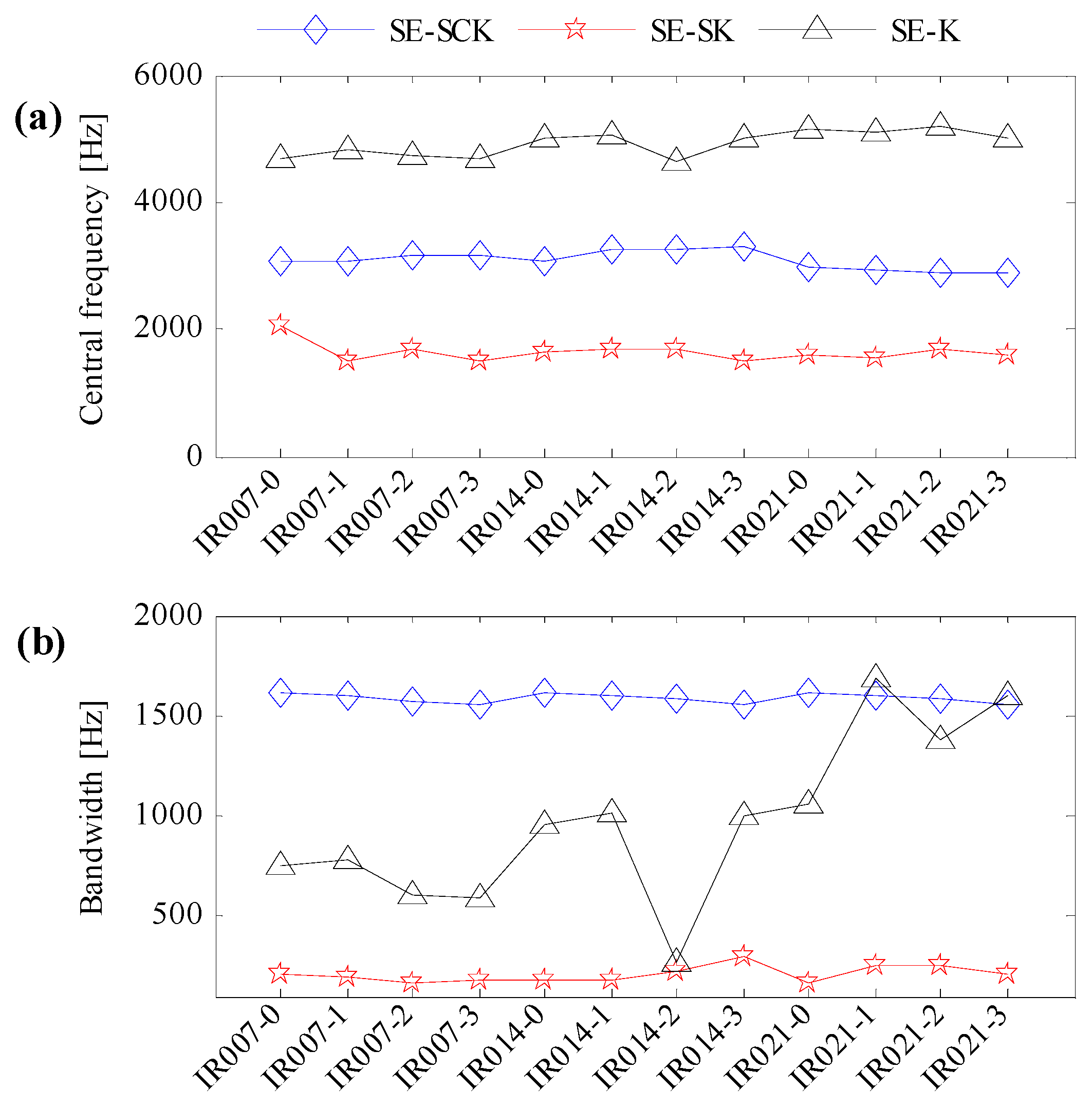
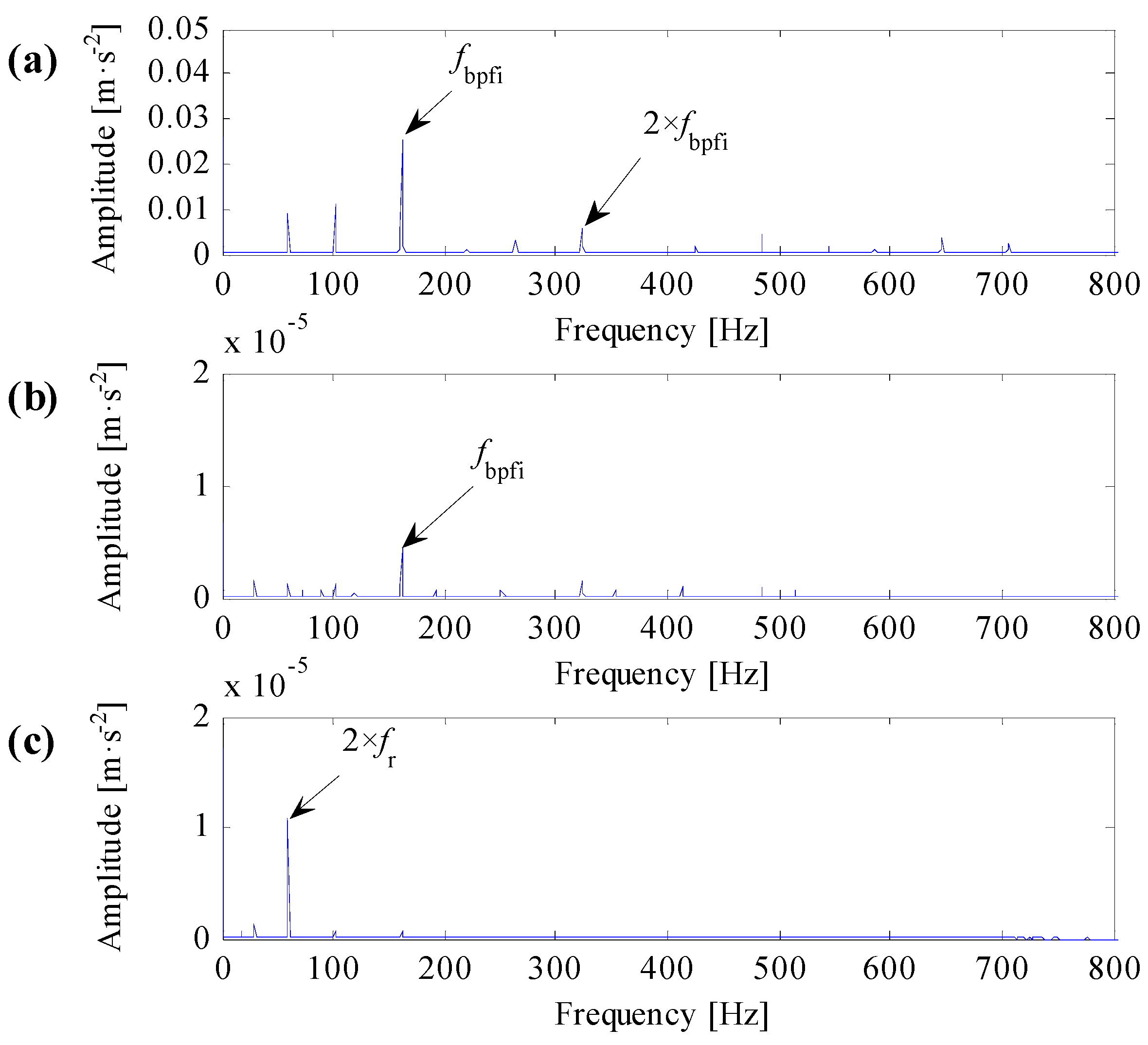
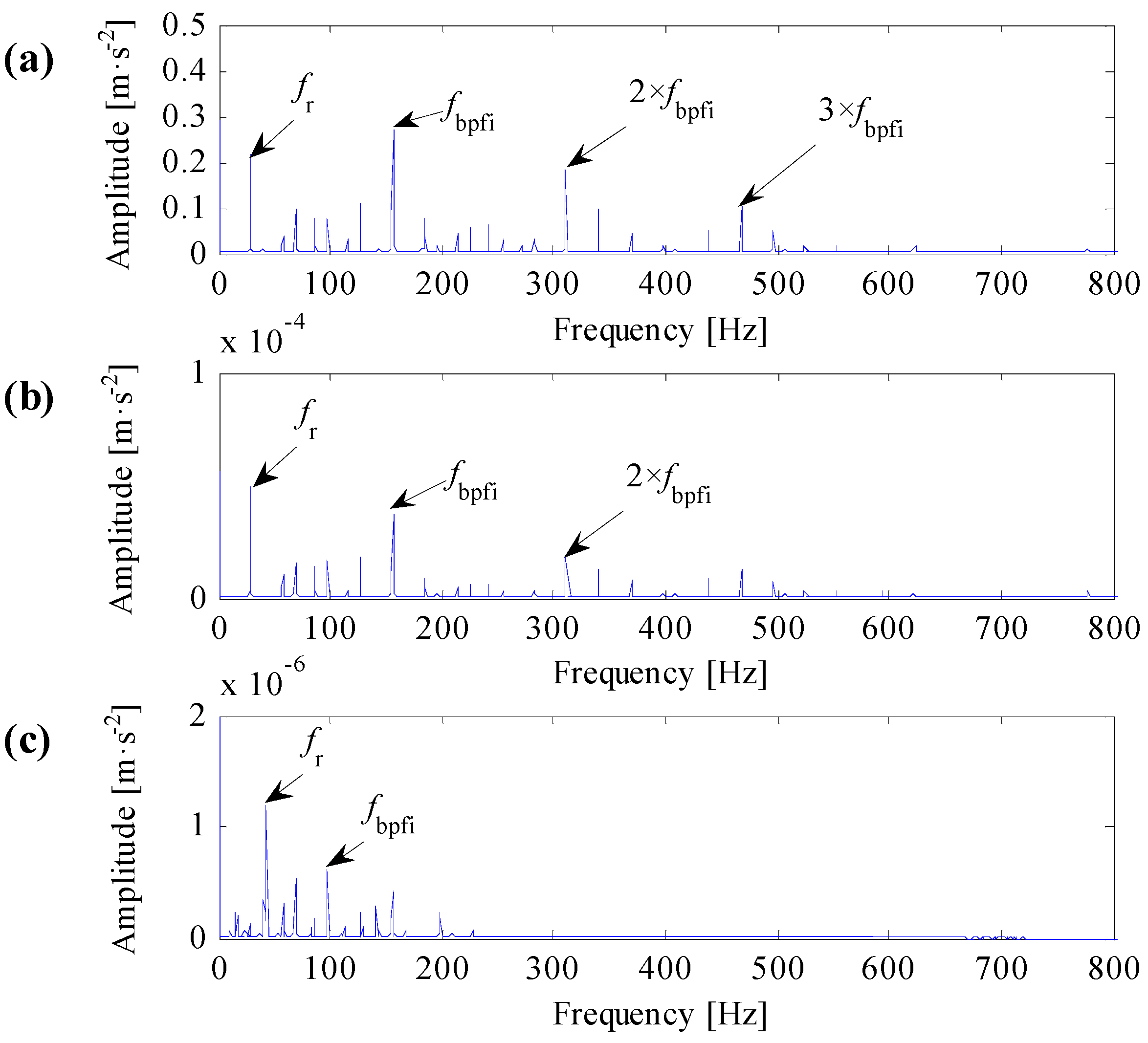
4.2. Experimental Analysis
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Smith, W.A.; Randall, R.B. Rolling element bearing diagnostics using the Case Western Reserve University data: A benchmark study. Mech. Syst. Signal Process. 2015, 64–65, 100–131. [Google Scholar] [CrossRef]
- Chen, X.; Feng, F.; Zhang, B. Weak Fault Feature Extraction of Rolling Bearings Based on an Improved Kurtogram. Sensors 2016, 9, 1482. [Google Scholar] [CrossRef] [PubMed]
- Antoni, J. The spectral kurtosis: A useful tool for characterizing non-stationary signals. Mech. Syst. Signal Process. 2006, 20, 282–307. [Google Scholar] [CrossRef]
- Antoni, J.; Randall, R.B. The spectral kurtosis: Application to the vibratory surveillance and diagnostics of rotating machines. Mech. Syst. Signal Process. 2006, 20, 308–331. [Google Scholar] [CrossRef]
- Antoni, J. Fast computation of the kurtogram for the detection of transient faults. Mech. Syst. Signal Process. 2007, 21, 108–124. [Google Scholar] [CrossRef]
- Wang, Y.; Xiang, J.; Markert, R.; Liang, M. Spectral kurtosis for fault detection, diagnosis and prognostics of rotating machines: A review with applications. Mech. Syst. Signal Process. 2016, 66, 679–698. [Google Scholar] [CrossRef]
- Lei, Y.; Lin, J.; He, Z.; Zi, Y. Application of an improved kurtogram method for fault diagnosis of rolling element bearings. Mech. Syst. Signal Process. 2011, 25, 1738–1749. [Google Scholar] [CrossRef]
- Zhang, X.; Kang, J.; Zhao, J.; Zhao, J.; Teng, H. Rolling element bearings fault diagnosis based on correlated kurtosis kurtogram. J. Vibroeng. 2015, 17, 243–260. [Google Scholar]
- Chen, B.; Zhang, Z.; Zi, Y.; He, Z.; Sun, C. Detecting of transient vibration signatures using an improved fast spatial–spectral ensemble kurtosis kurtogram and its applications to mechanical signature analysis of short duration data from rotating machinery. Mech. Syst. Signal Process. 2015, 40, 1–37. [Google Scholar] [CrossRef]
- Wang, D.; Tse, P.W.; Tsui, K.L. An enhanced Kurtogram method for fault diagnosis of rolling element bearings. Mech. Syst. Signal Process. 2013, 35, 176–199. [Google Scholar] [CrossRef]
- Barszcz, T.; JabŁoński, A. A novel method for the optimal band selection for vibration signal demodulation and comparison with the Kurtogram. Mech. Syst. Signal Process. 2011, 25, 431–451. [Google Scholar] [CrossRef]
- Tse, P.W.; Wang, D. The design of a new sparsogram for fast bearing fault diagnosis: Part 1 of the two related manuscripts that have a joint title as “Two automatic vibration-based fault diagnostic methods using the novel sparsity measurement—Parts 1 and 2”. Mech. Syst. Signal Process. 2013, 40, 499–519. [Google Scholar] [CrossRef]
- Antoni, J. The infogram: Entropic evidence of the signature of repetitive transients. Mech. Syst. Signal Process. 2016, 74, 73–94. [Google Scholar] [CrossRef]
- Li, C.; Liang, M.; Wang, T. Criterion fusion for spectral segmentation and its application to optimal demodulation of bearing vibration signals. Mech. Syst. Signal Process. 2013, 64–65, 132–148. [Google Scholar] [CrossRef]
- Tse, P.W.; Wang, D. The automatic selection of an optimal wavelet filter and its enhancement by the new sparsogram for bearing fault detection. Mech. Syst. Signal Process. 2013, 40, 520–544. [Google Scholar] [CrossRef]
- Immovilli, F.; Bellini, A.; Rubini, R. Diagnosis of Bearing Faults in Induction Machines by Vibration or Current Signals: A Critical Comparison. IEEE Trans. Ind. Appl. 2008, 46, 1350–1359. [Google Scholar] [CrossRef]
- Henao, H.; Capolino, G.A.; Fernandez-Cabanas, M. Trends in Fault Diagnosis for Electrical Machines: A Review of Diagnostic Techniques. IEEE Ind. Electron. Mag. 2014, 8, 31–42. [Google Scholar] [CrossRef]
- Frosini, L.; HarlişCa, C.; Szabó, L. Induction Machine Bearing Fault Detection by Means of Statistical Processing of the Stray Flux Measurement. IEEE Trans. Ind. Electron. 2015, 62, 1846–1854. [Google Scholar] [CrossRef]
- McDonald, G.L.; Zhao, Q.; Zuo, M.J. Maximum correlated Kurtosis deconvolution and application on gear tooth chip fault detection. Mech. Syst. Signal Process. 2012, 33, 237–255. [Google Scholar] [CrossRef]
- Borghesani, P.; Pennacchi, P.; Chatterton, S. The relationship between kurtosis- and envelope-based indexes for the diagnostic of rolling element bearings. Mech. Syst. Signal Process. 2014, 43, 25–43. [Google Scholar] [CrossRef]
- Zhang, X.; Kang, J.; Hao, L.; Cai, L.; Zhao, J. Bearing fault diagnosis and degradation analysis based on improved empirical mode decomposition and maximum correlated kurtosis deconvolution. J. Vibroeng. 2015, 17, 243–260. [Google Scholar]
- Jia, F.; Lei, Y.; Shan, H.; Lin, J. Early Fault Diagnosis of Bearings Using an Improved Spectral Kurtosis by Maximum Correlated Kurtosis Deconvolution. Sensors 2015, 15, 29363–29377. [Google Scholar] [CrossRef] [PubMed]
- Chen, H.; Zuo, M.; Wang, X. An adaptive Morlet wavelet filter for time-of-flight estimation in ultrasonic damage assessment. Measurement 2010, 43, 570–585. [Google Scholar] [CrossRef]
- Su, W.; Wang, F.; Zhu, H. Rolling element bearing faults diagnosis based on optimal Morlet wavelet filter and autocorrelation enhancement. Mech. Syst. Signal Process. 2010, 24, 1458–1472. [Google Scholar] [CrossRef]
- Liu, H.; Huang, W.; Wang, S. Adaptive spectral kurtosis filtering based on Morlet wavelet and its application for signal transients detection. Signal Process. 2014, 96, 118–124. [Google Scholar] [CrossRef]
- He, W.; Jiang, Z.; Feng, K. Bearing fault detection based on optimal wavelet filter and sparse code shrinkage. Measurement 2009, 42, 1092–1102. [Google Scholar] [CrossRef]
- Case Western Reserve University Bearing Data Center Website. Available online: http://csegroups.case.edu/bearingdatacenter/ (accessed on 9 April 2016).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Signal | K | CK | ReCK |
|---|---|---|---|
| Y1 | 15.0526 | 0 | 0 |
| Y2 | 15.0526 | 0.2222 | 13.3333 |
| Y3 | 15.0526 | 0.16 | 16 |
| Y4 | 0.2928 | 0.0048 | 0.9694 |
| Y5 | −1.5 | 0.0068 | 1.35 |
| Signal | SK | SESCK |
|---|---|---|
| Y1 | 15.0526 | 0 |
| Y2 | 15.0526 | 13.3333 |
| Y3 | 15.0526 | 16 |
| No. | Fault Depth/mm | Fault Diameter/mm | Motor Load/kW | Rotating Speed/rpm | Fault Feature Frequency/Hz |
|---|---|---|---|---|---|
| IR007-0 | 2.7940 | 0.1778 | 0 | 1797 | 162 |
| IR007-1 | 0.7355 | 1772 | 159 | ||
| IR007-2 | 1.4710 | 1748 | 157 | ||
| IR007-3 | 2.2065 | 1721 | 155 | ||
| IR014-0 | 2.7940 | 0.3556 | 0 | 1796 | 162 |
| IR014-1 | 0.7355 | 1774 | 160 | ||
| IR014-2 | 1.4710 | 1752 | 158 | ||
| IR014-3 | 2.2065 | 1728 | 156 | ||
| IR021-0 | 2.7940 | 0.5334 | 0 | 1797 | 162 |
| IR021-1 | 0.7355 | 1774 | 160 | ||
| IR021-2 | 1.4710 | 1752 | 158 | ||
| IR021-3 | 2.2065 | 1728 | 156 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, X.; Zhang, B.; Feng, F.; Jiang, P. Optimal Resonant Band Demodulation Based on an Improved Correlated Kurtosis and Its Application in Bearing Fault Diagnosis. Sensors 2017, 17, 360. https://doi.org/10.3390/s17020360
Chen X, Zhang B, Feng F, Jiang P. Optimal Resonant Band Demodulation Based on an Improved Correlated Kurtosis and Its Application in Bearing Fault Diagnosis. Sensors. 2017; 17(2):360. https://doi.org/10.3390/s17020360
Chicago/Turabian StyleChen, Xianglong, Bingzhi Zhang, Fuzhou Feng, and Pengcheng Jiang. 2017. "Optimal Resonant Band Demodulation Based on an Improved Correlated Kurtosis and Its Application in Bearing Fault Diagnosis" Sensors 17, no. 2: 360. https://doi.org/10.3390/s17020360