Generalized Nonlinear Chirp Scaling Algorithm for High-Resolution Highly Squint SAR Imaging


Abstract
:1. Introduction
2. GNLCSA
2.1. Preprocess in Range Direction by Generalized Chirp Scaling
2.2. Azimuth Filter and Coefficients
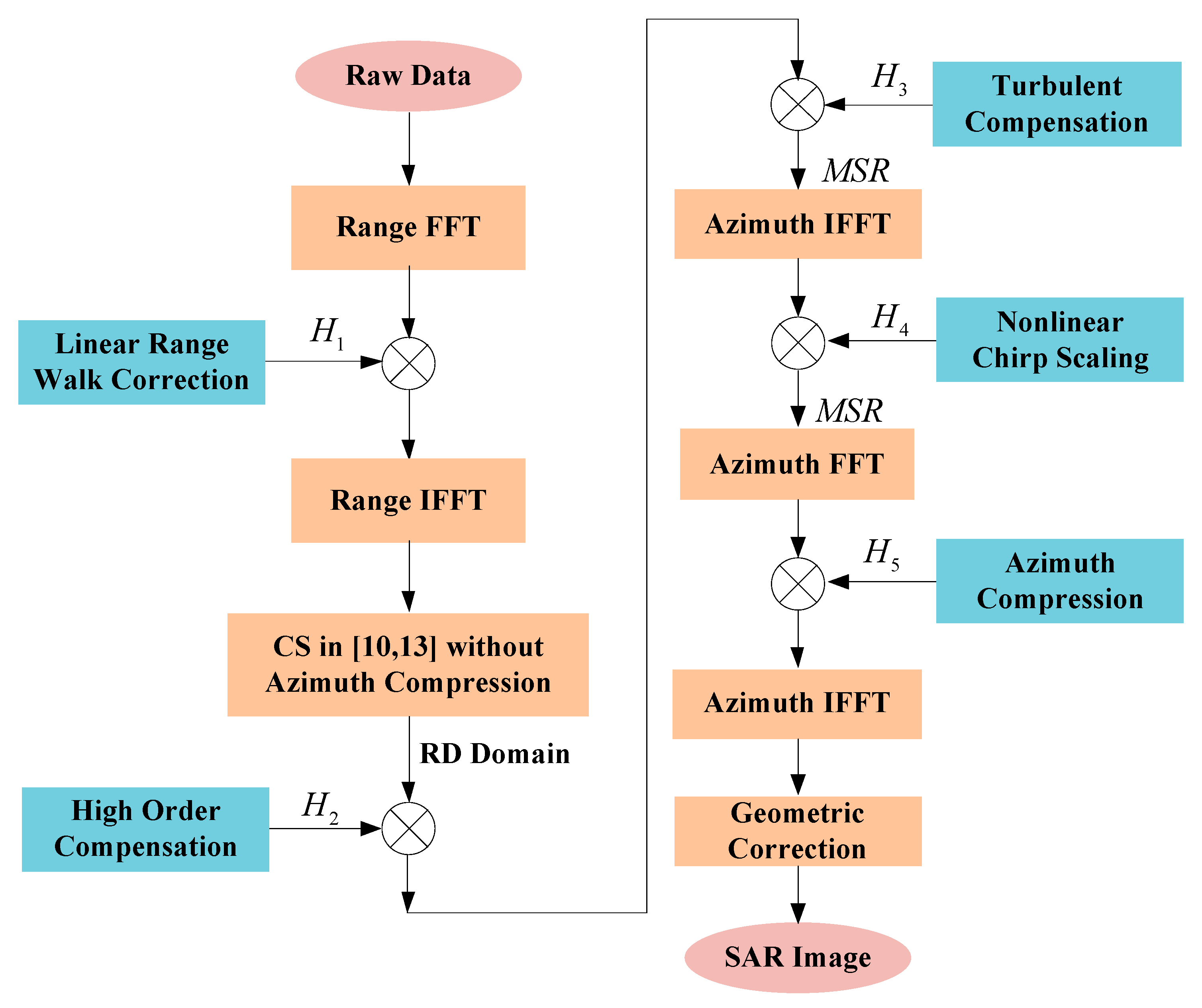
2.3. Block Diagram of GNLCSA
- Step 1.
- A range FFT is used to transfer the raw data to the range frequency domain. The data is multiplied with the filter of LRWC to achieve the processing of “equivalent broadside” in range direction.
- Step 2.
- range IFFT is implemented to transfer the data after LRWC into the range time domain. The modified CSA proposed in [18,21], is introduced to process the former high-resolution squint data, which has the advantages of eliminating the coupling between the range and azimuth dimensions and enhancing the focusing precision for the range dimension at any ratio of ( is the bandwidth of the transmitting pulse).
- Step 3.
- The high order compensation filter is multiplied with the data after the processing of step 2. It reduces the deteriorations of focusing caused by the high order phase error.
- Step 4.
- A turbulent compensation filter is multiplied with the data after the processing of step 3 to achieve a coincident FM rate form of different slant range along the azimuth direction.
- Step 5.
- The MSR is implemented in the azimuth IFFT for the data after the processing of step 4. Then a nonlinear chirp scaling filter is applied to compensate the azimuth variance.
- Step 6.
- After the processing of the nonlinear chirp scaling, the MSR is also applied in the azimuth FFT for the data. The azimuth compression filter is used to achieve the focusing of the squint data. Then an IFFT is applied for the focusing data in the RD domain.
- Step 7.
- The geometric correction is applied in the final step to obtain images matching the geometry of the signal acquisition.
3. Experimental Results and Discussion
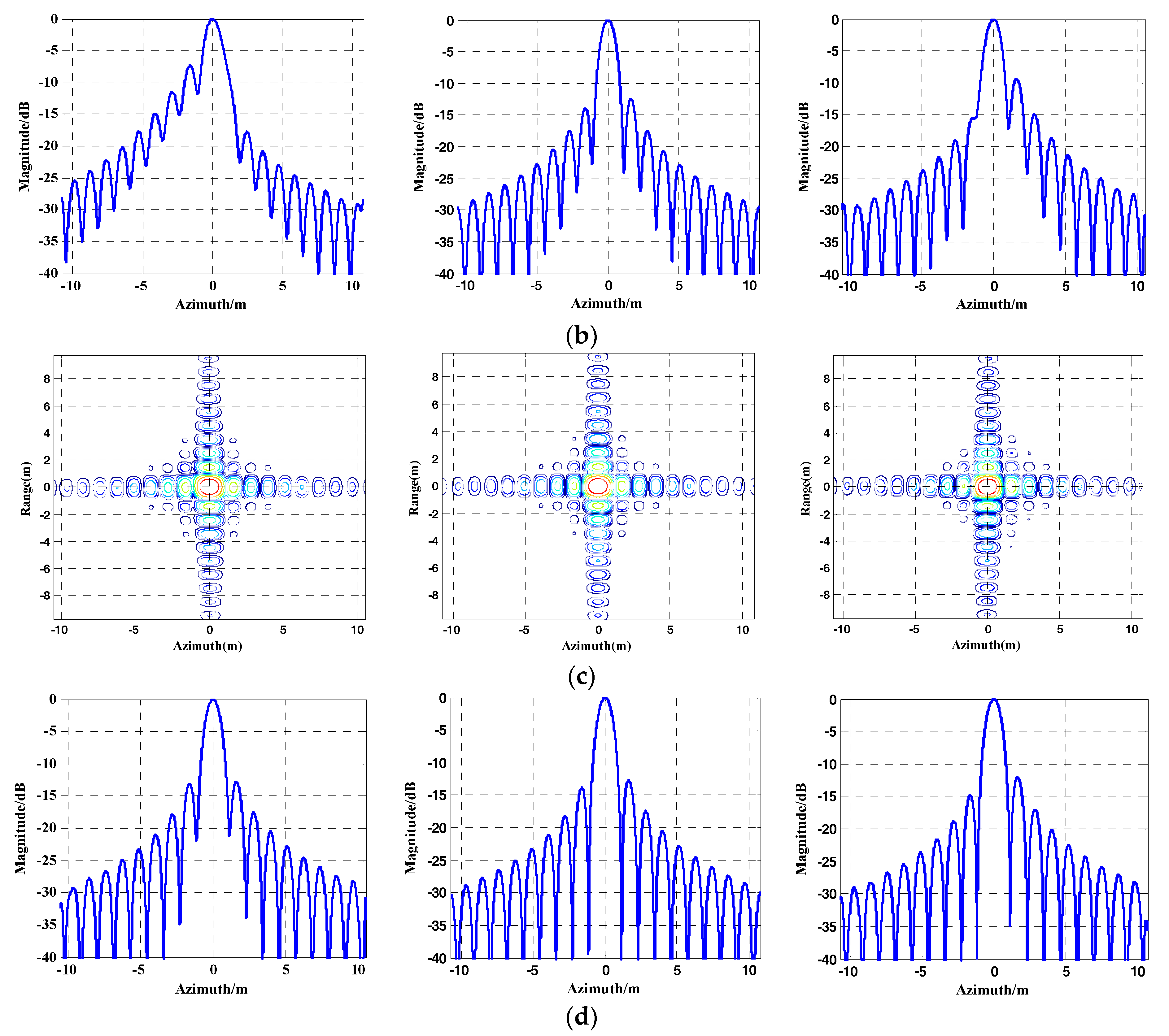
3.1. Experimental Results
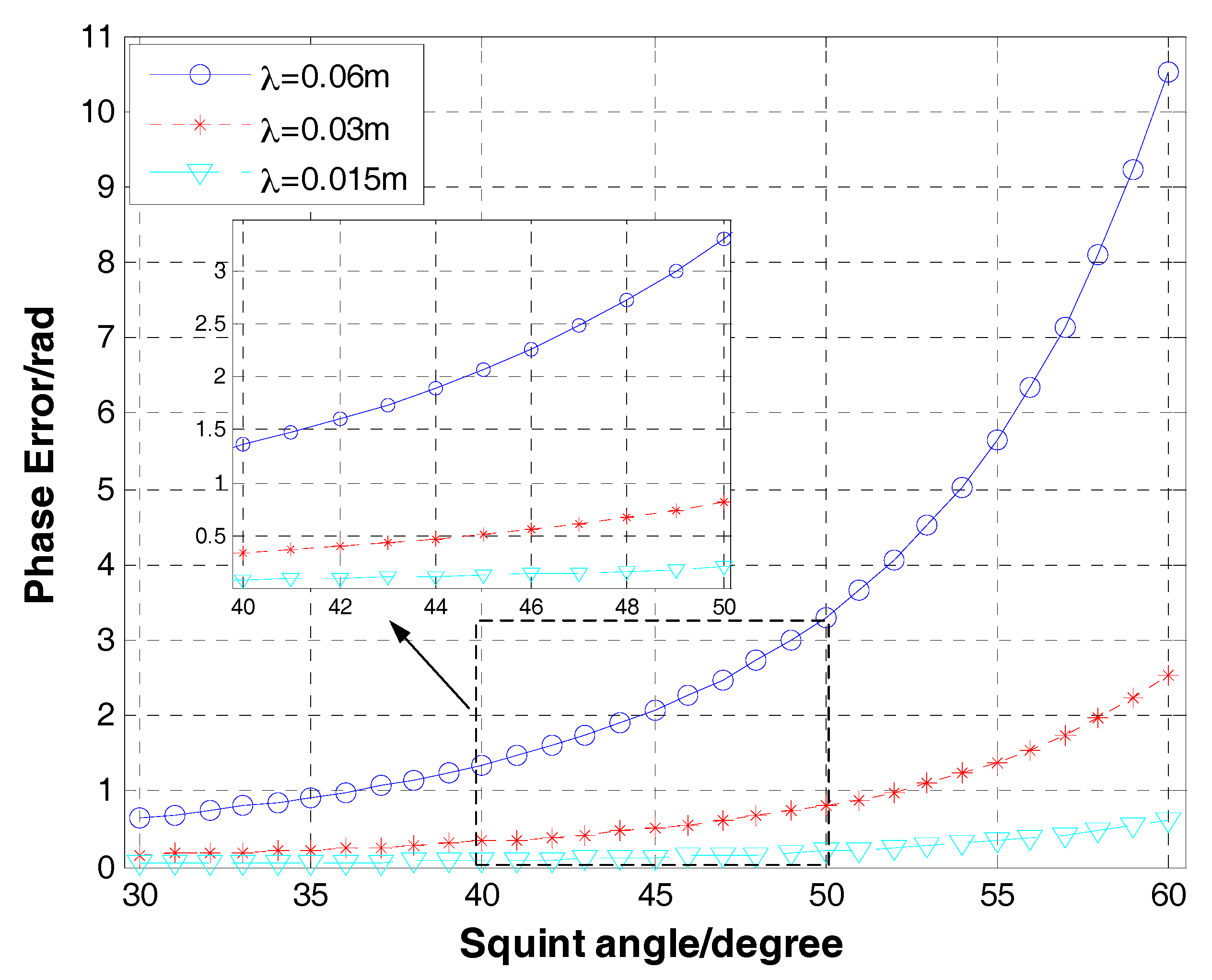
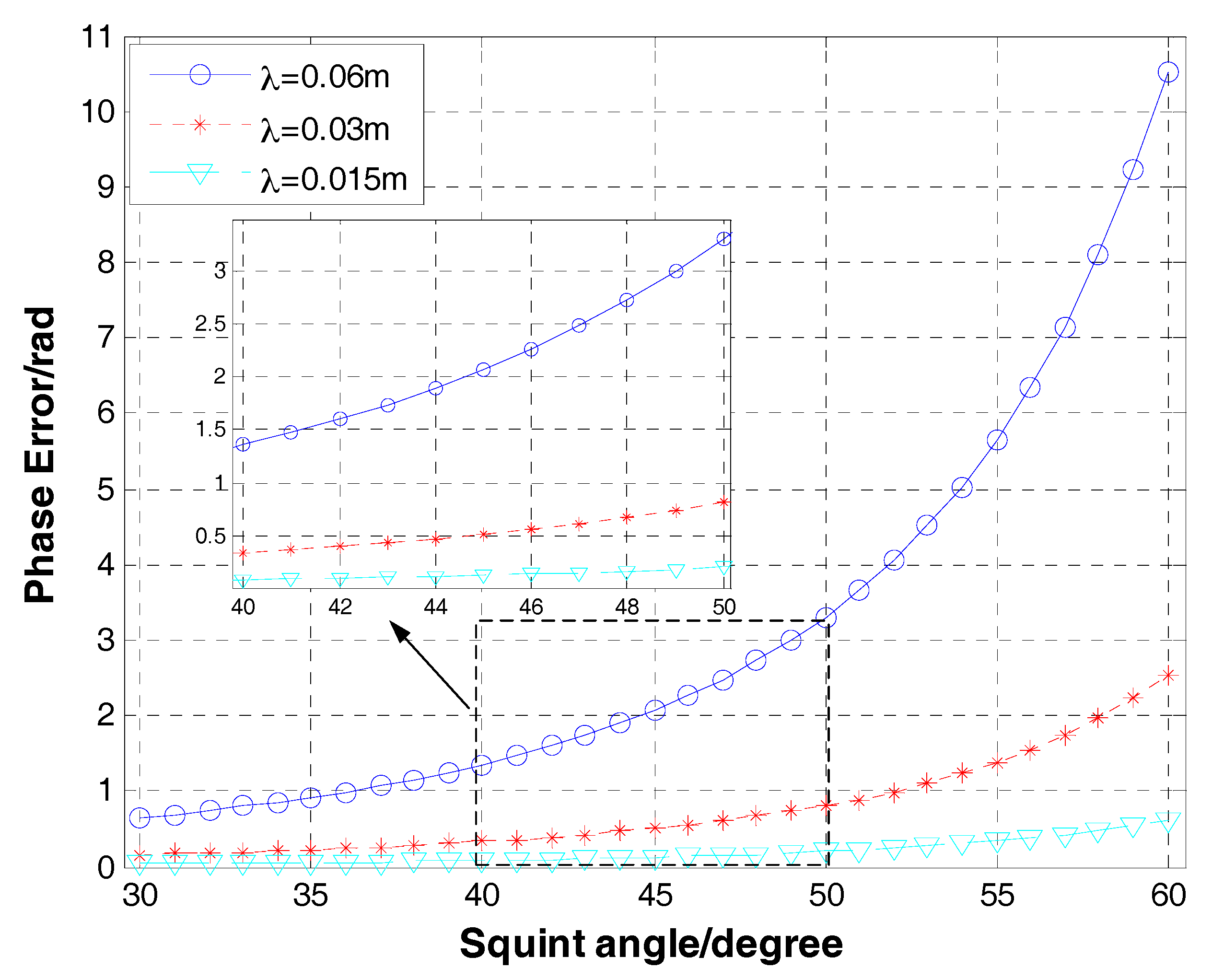
3.2. Discussion
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- An, D.; Huang, X.; Jin, T.; Zhou, Z. Extended Nonlinear Chirp Scaling Algorithm for High-Resolution Highly Squint SAR Data Focusing. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3595–3609. [Google Scholar] [CrossRef]
- Carrara, W.G.; Goodman, R.S.; Majewski, R.M. Signal properties of spaceborne squint-mode SAR. IEEE Trans. Geosci. Remote Sens. 1997, 35, 611–617. [Google Scholar]
- Wong, F.H.; Cumming, I.G.; Neo, Y.L. Focusing bistatic SAR datausing the nonlinear chirp scaling algorithm. IEEE Trans. Geosci. Remote Sens. 2008, 46, 2493–2505. [Google Scholar] [CrossRef]
- Jin, M.Y.; Wu, C. A SAR correlation algorithm which accommodates large range migration. IEEE Trans. Geosci. Remote Sens. 1984, GE-22, 592–597. [Google Scholar] [CrossRef]
- Bamler, R. A comparison of range-Doppler and wavenumber domain SAR focusing algorithms. IEEE Trans. Geosci. Remote Sens. 1992, 30, 706–713. [Google Scholar] [CrossRef]
- Wang, K.; Liu, X. Quartic-phase algorithm for highly squinted SAR data processing. IEEE Geosci. Remote Sens. Lett. 2007, 4, 246–250. [Google Scholar] [CrossRef]
- Yamaoka, T.; Suwa, K.; Hara, T.; Nakano, Y. Radar Video Generated from Synthetic Aperture Radar Image. In Proceedings of the International Geoscience Remote Sensing Symposium, Beijing, China, 10–15 July 2016. [Google Scholar]
- Bishop, E.; Linnehan, R. Video-SAR Using Higher Order Taylor Terms for Differential Range. In Proceedings of the IEEE Radar Conference, Philadelphia, PA, USA, 2–6 May 2016. [Google Scholar]
- Liu, B.; Zhang, X.; Tang, K.; Liu, M.; Liu, L. Spaceborne Video-SAR Moving Target Surveillance System. In Proceedings of the International Geoscience Remote Sensing Symposium, Beijing, China, 10–15 July 2016. [Google Scholar]
- Song, X.; Yu, W. Derivation and application of stripmap VideoSAR parameter relations. J. Univ. Chin. Acad. Sci. 2016, 33, 121–127. [Google Scholar]
- Li, C.; He, M. A Generalized Chirp-Scaling Algorithm for Geosynchronous Orbit SAR Staring Observations. Sensors 2017, 17, 1058. [Google Scholar] [CrossRef] [PubMed]
- Hua, L. Analysis and simulation of UAV terahertz wave synthetic aperture radar imaging. Inf. Electron. Eng. 2010, 8, 373–377, 382. [Google Scholar]
- Moreira, A.; Huang, Y. Airbome SAR Processing of Highly Squinted Data Using a Chirp Scaling Approach with Integrated Motion Compensation. IEEE Trans. Geosci. Remote Sens. 1994, 32, 1029–1040. [Google Scholar] [CrossRef]
- Raney, R.K.; Runge, H.; Bamler, R.; Cumming, I.G.; Wong, F.H. Precision SAR processing using chirp scaling. IEEE Trans. Geosci. Remote Sens. 1994, 32, 786–799. [Google Scholar] [CrossRef]
- Firooz, S. New comparative experiments in range migration mitigation methods using polarimetric inverse synthetic aperture radar signatures of small boats. In Proceedings of the Radar Conference, Cincinnati, OH, USA, 19–23 May 2014. [Google Scholar]
- Cafforio, C.; Prati, C.; Rocca, F. SAR data focusing using seismic migration techniques. IEEE Trans. Aerosp. Electron. Syst. 1991, 27, 194–207. [Google Scholar] [CrossRef]
- Li, D.; Lin, H.; Liu, H.; Liao, G.; Tan, X. Focus Improvement for High-Resolution Highly Squinted SAR Imaging Based on 2-D Spatial-Variant Linear and Quadratic RCMs Correction and Azimuth-Dependent Doppler Equalization. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 168–183. [Google Scholar] [CrossRef]
- Yi, T.; He, Z.; He, F.; Dong, Z.; Wu, M. Generalized Chirp Scaling Combined with Baseband Azimuth Scaling Algorithm for Large Bandwidth Sliding Spotlight SAR Imaging. Sensors 2017, 17, 1237. [Google Scholar] [CrossRef] [PubMed]
- An, D.; Huang, X.; Zhou, Z. Extended Wavenumber Domain Algorithm for Airborne Low Frequency SAR in Highly Squinted Mode. In Proceedings of the IET International Radar Conference, Guilin, China, 20–22 April 2009. [Google Scholar]
- Wong, F.H.; Yeo, T.S. New Application of Nonlinear Chirp Scaling in SAR Data Processing. IEEE Trans. Geosci. Remote Sens. 2001, 39, 946–952. [Google Scholar] [CrossRef]
- Zaugg, E.C.; Long, D.G. Generalized Frequency-Domain SAR Processing. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3761–3773. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Coefficients | Value |
|---|---|
| Coefficients | Value |
|---|---|
| 0 | |
| Parameters | Values |
|---|---|
| Center Frequency () | 8 GHz |
| Bandwidth () | 150 MHz |
| Sampling Frequency () | 180 MHz |
| Antenna Size () | 2 m × 1.5 m |
| Scene Size/km | 4 km × 4 km |
| Targets Distribution (R × A) | 9 × 11 |
| Sensor Velocity () | 100 m/s |
| Pulse Repeat Frequency () | 300 Hz |
| Pulse Width () | 30 us |
| Center Slant Range () | 20 km |
| Squint Angle () | 45° |
| Algorithm | Dimension | Performance | Target Index | ||
|---|---|---|---|---|---|
| 1 | 2 | 3 | |||
| ENLCSA | Range | Res/m | 0.8854 | 0.8854 | 0.8854 |
| PSLR/dB | −13.2545 | −13.2675 | −13.2818 | ||
| ISLR/dB | −9.9274 | −9.8464 | −9.8847 | ||
| Azimuth | Res/m | 1.1294 | 1.0221 | 1.0219 | |
| PSLR/dB | −7.3320 | −12.4446 | −9.3459 | ||
| ISLR/dB | −9.6334 | −9.3022 | −6.2756 | ||
| GNLCSA | Range | Res/m | 0.8828 | 0.8854 | 0.8854 |
| PSLR/dB | −13.2864 | −13.2761 | −13.3001 | ||
| ISLR/dB | −9.3836 | −9.8400 | −9.8404 | ||
| Azimuth | Res/m | 1.0115 | 1.0135 | 1.0188 | |
| PSLR/dB | −12.7645 | −12.7299 | −12.0016 | ||
| ISLR/dB | −9.5608 | −9.6637 | −9.0291 | ||
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yi, T.; He, Z.; He, F.; Dong, Z.; Wu, M. Generalized Nonlinear Chirp Scaling Algorithm for High-Resolution Highly Squint SAR Imaging. Sensors 2017, 17, 2568. https://doi.org/10.3390/s17112568
Yi T, He Z, He F, Dong Z, Wu M. Generalized Nonlinear Chirp Scaling Algorithm for High-Resolution Highly Squint SAR Imaging. Sensors. 2017; 17(11):2568. https://doi.org/10.3390/s17112568
Chicago/Turabian StyleYi, Tianzhu, Zhihua He, Feng He, Zhen Dong, and Manqing Wu. 2017. "Generalized Nonlinear Chirp Scaling Algorithm for High-Resolution Highly Squint SAR Imaging" Sensors 17, no. 11: 2568. https://doi.org/10.3390/s17112568