
Stripe-PZT Sensor-Based Baseline-Free Crack Diagnosis in a Structure with a Welded Stiffener



Abstract
:1. Introduction
2. Theoretical Development
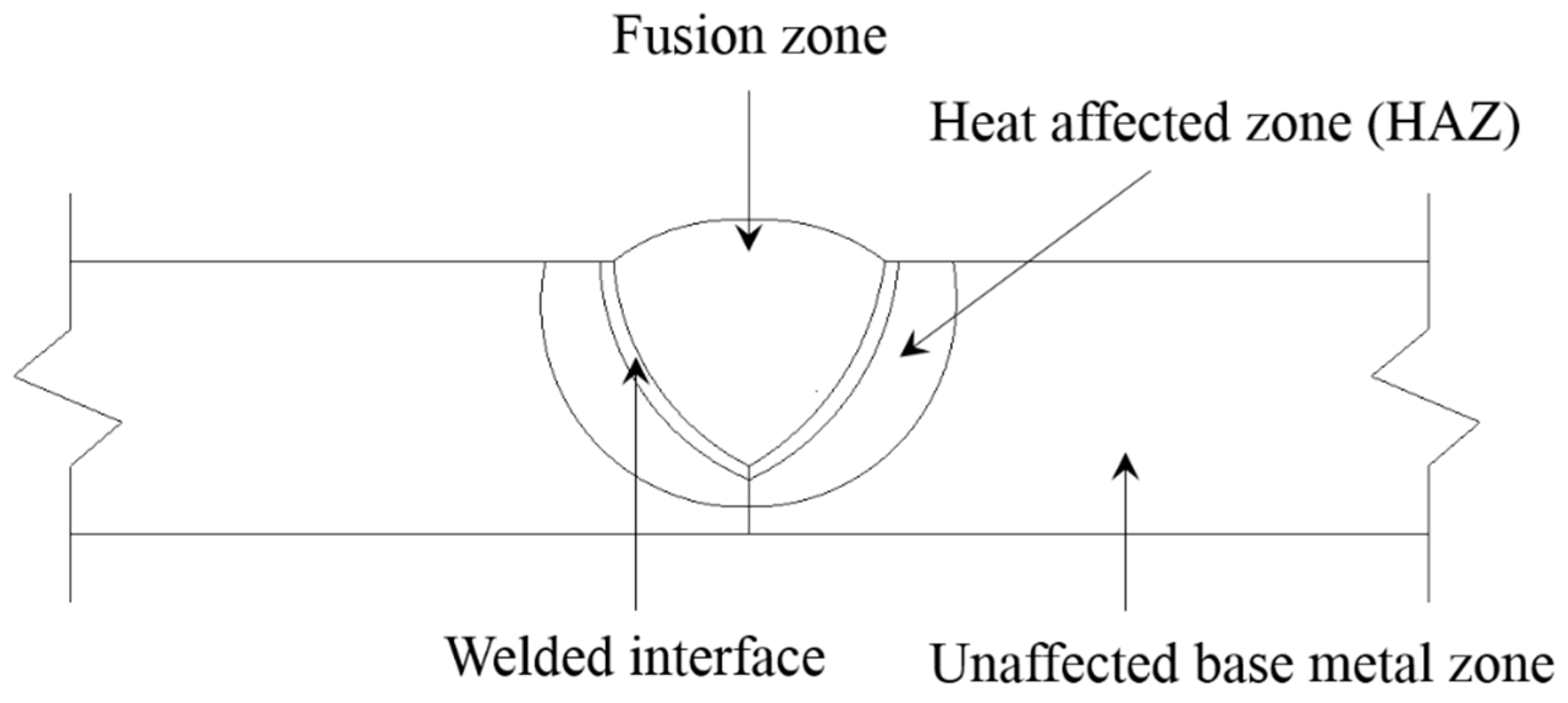
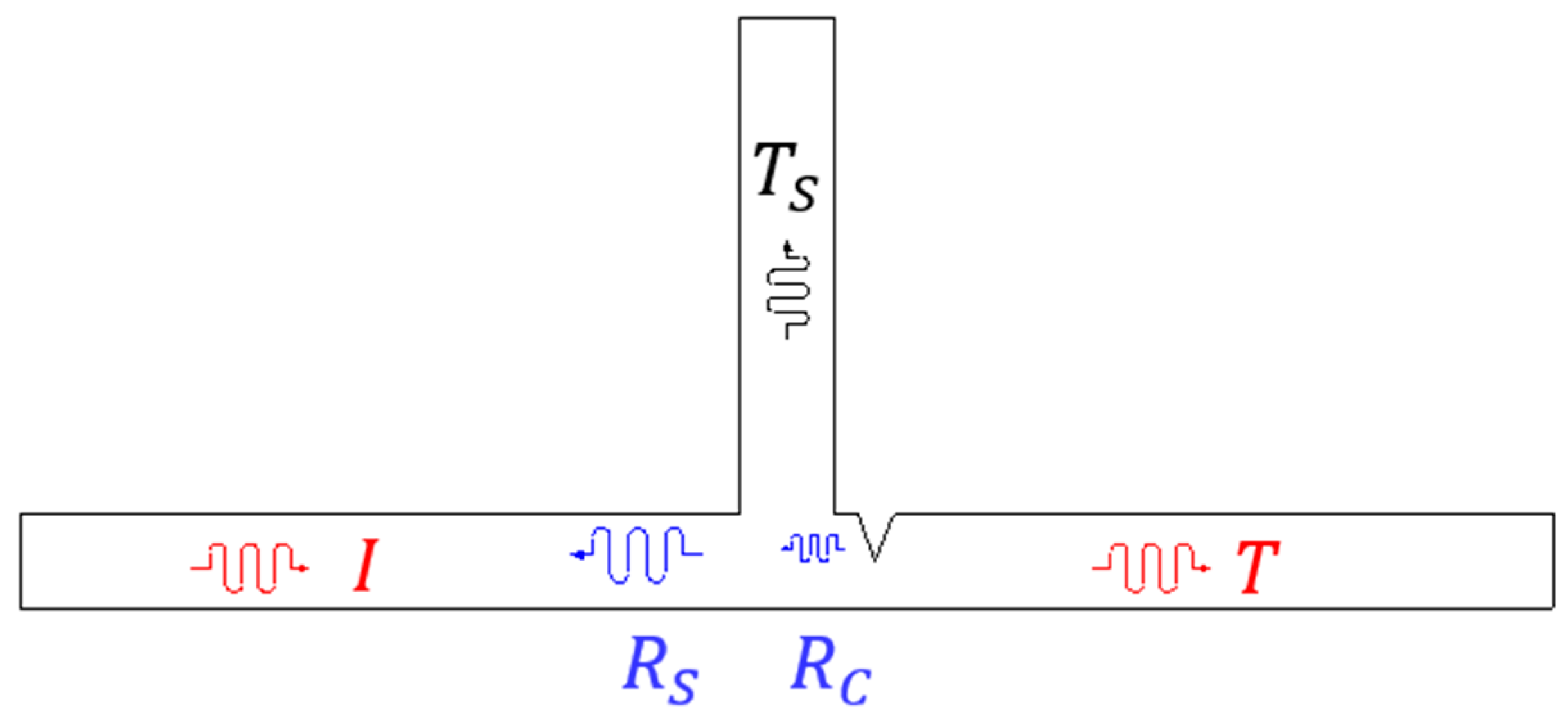
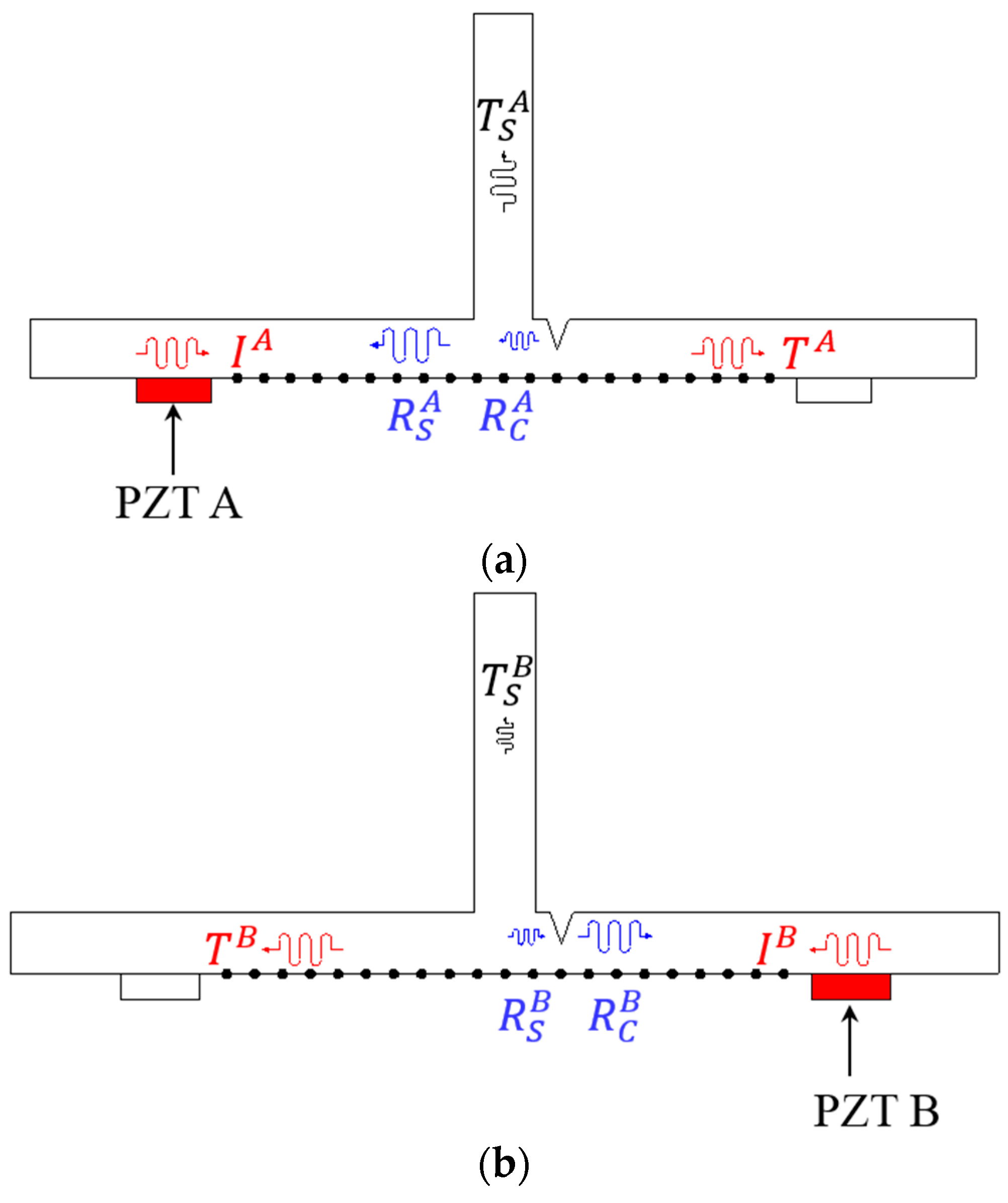
2.1. Lamb Wave Interaction with a Crack in HAZ
2.2. Development of a Baseline-Free Crack Diagnosis Algorithm
3. Finite Element (FE) Analysis
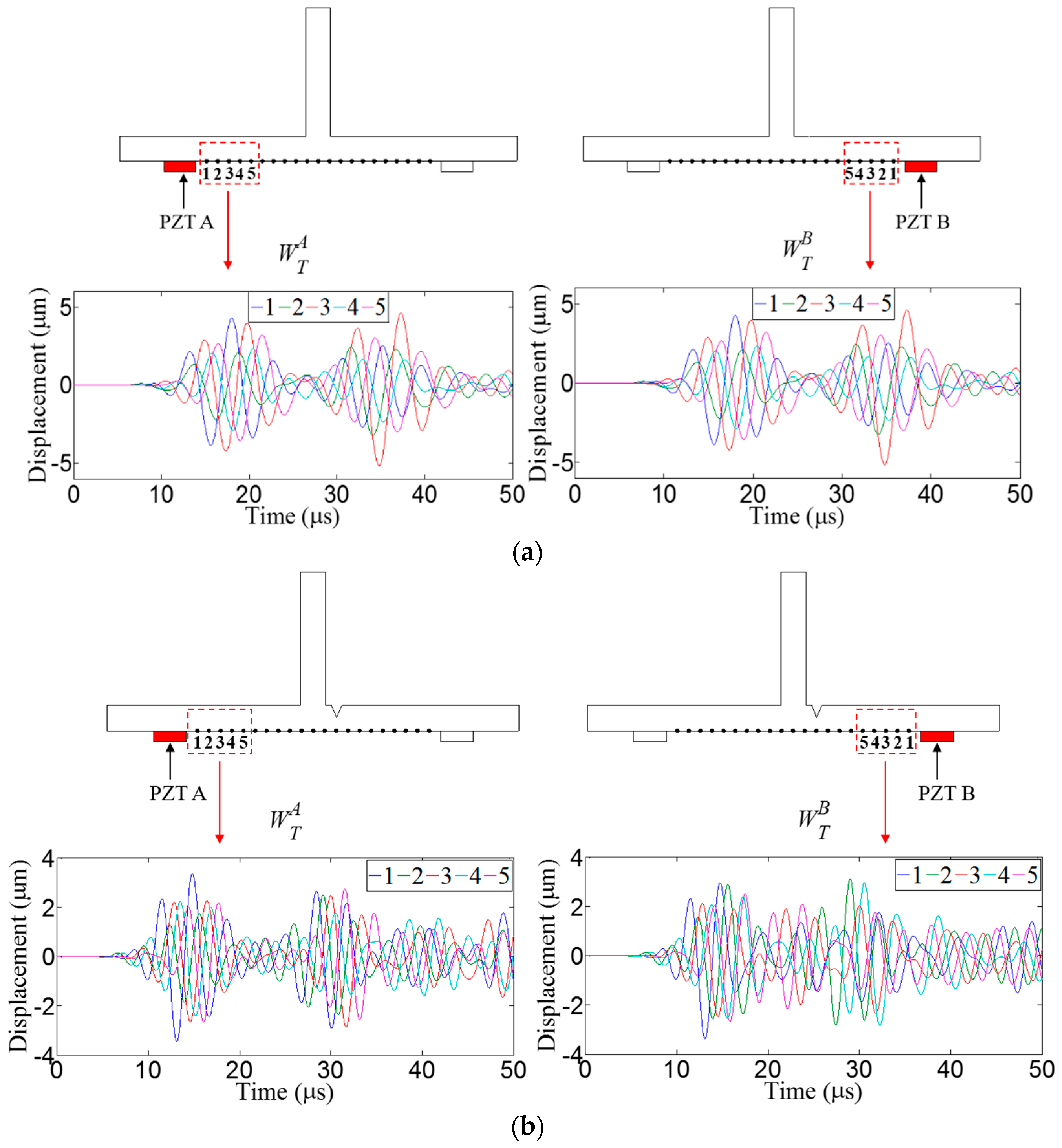
3.1. Description of a FE Model
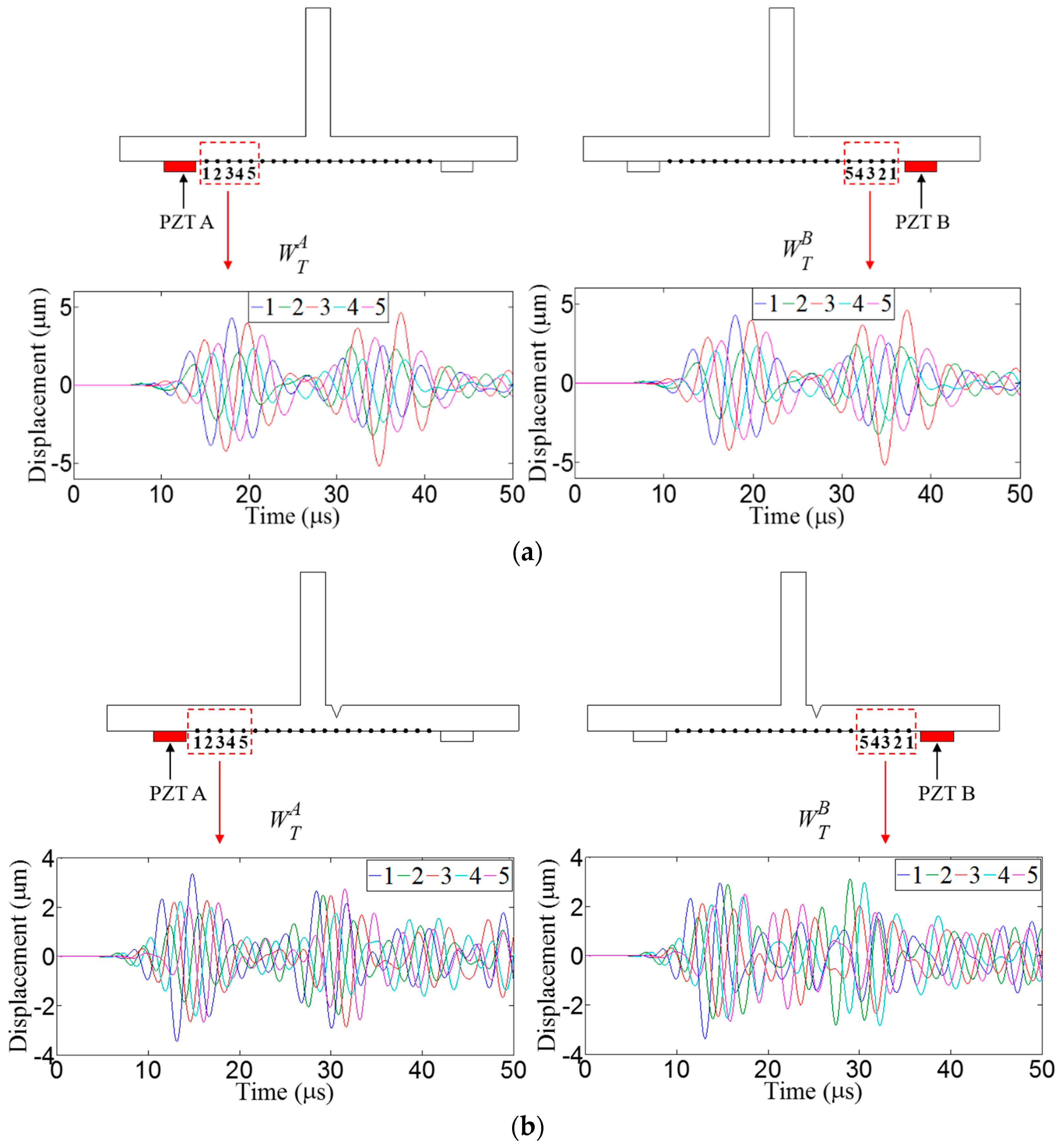
3.2. FE Analysis Results
3.2.1. Crack Identification
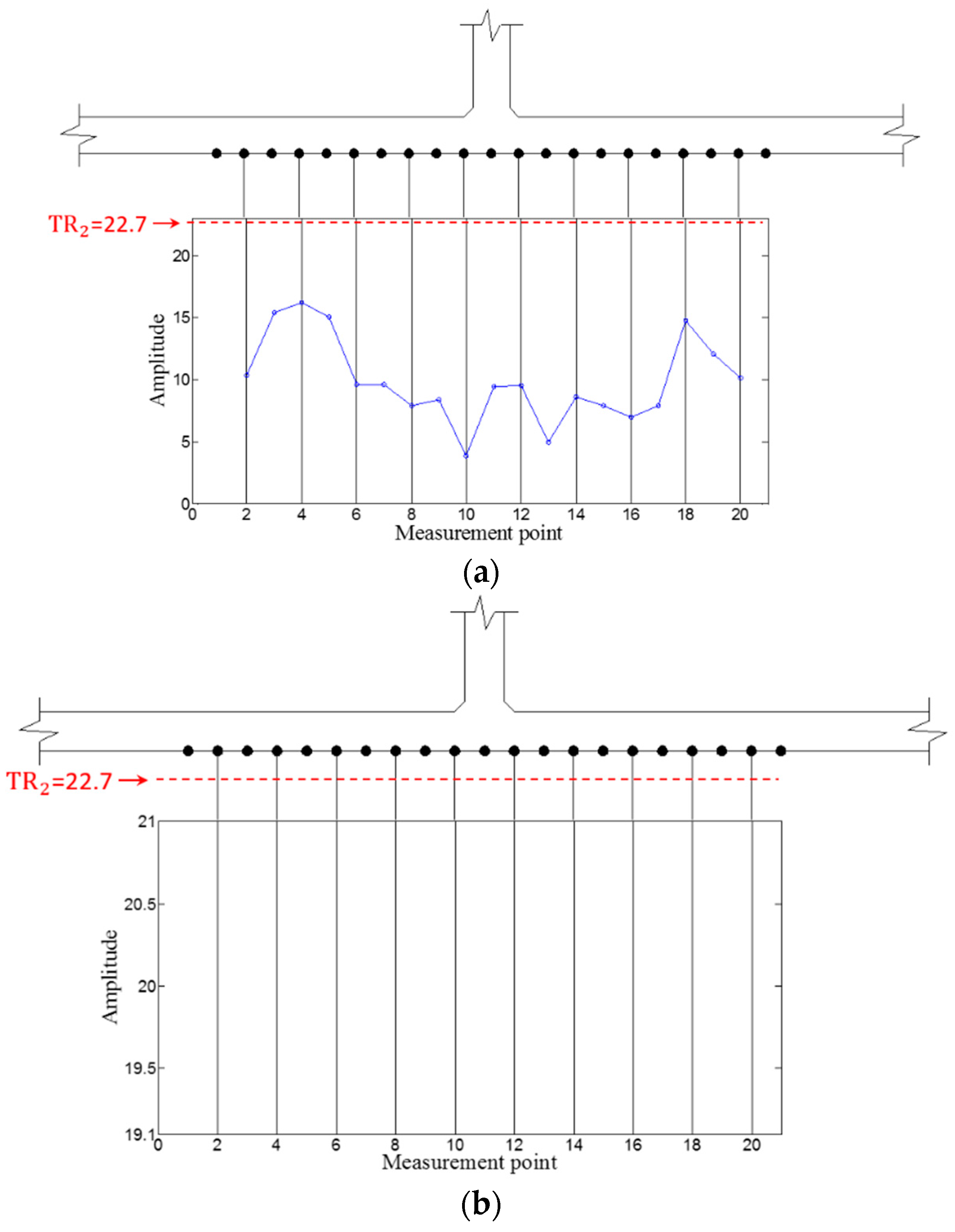
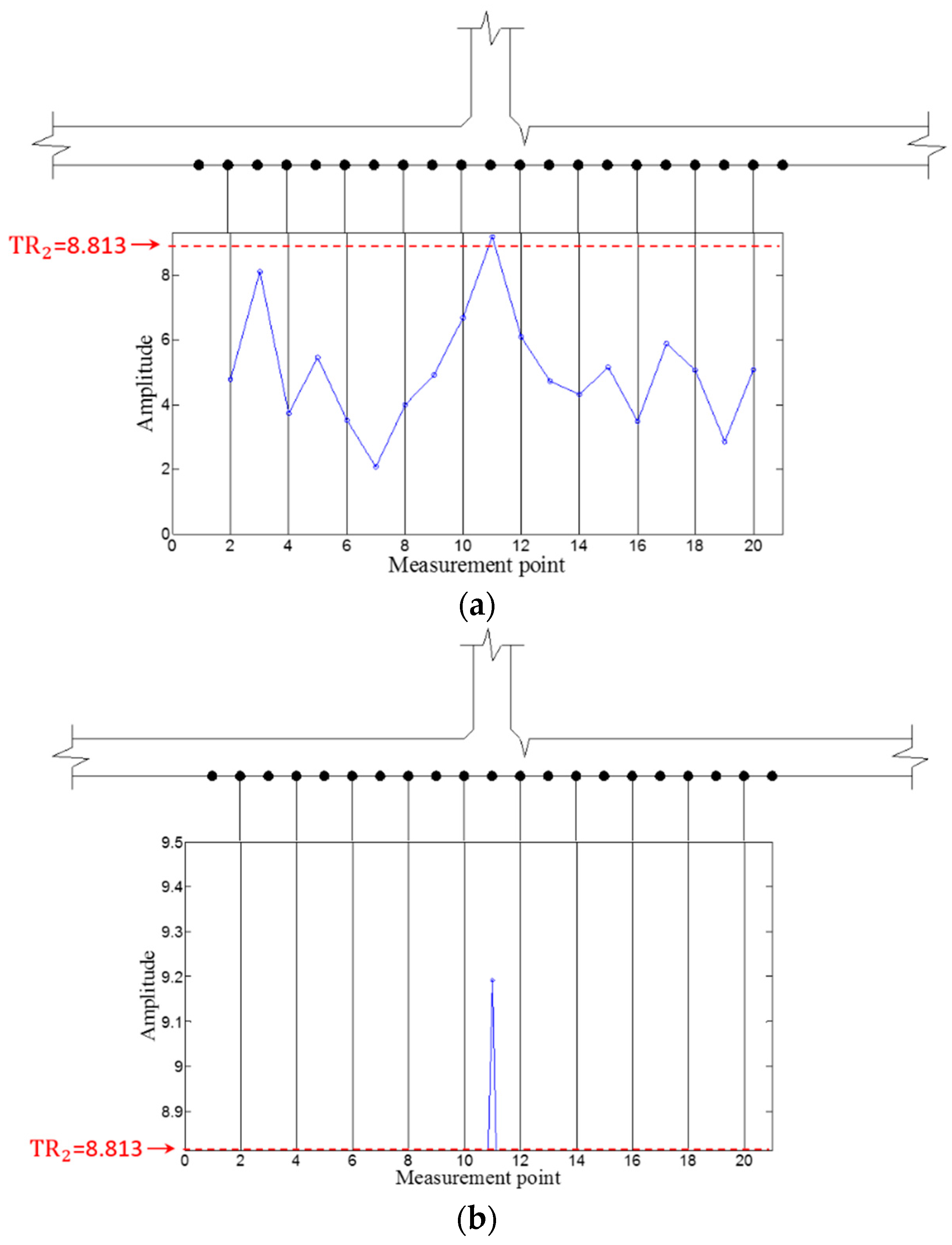
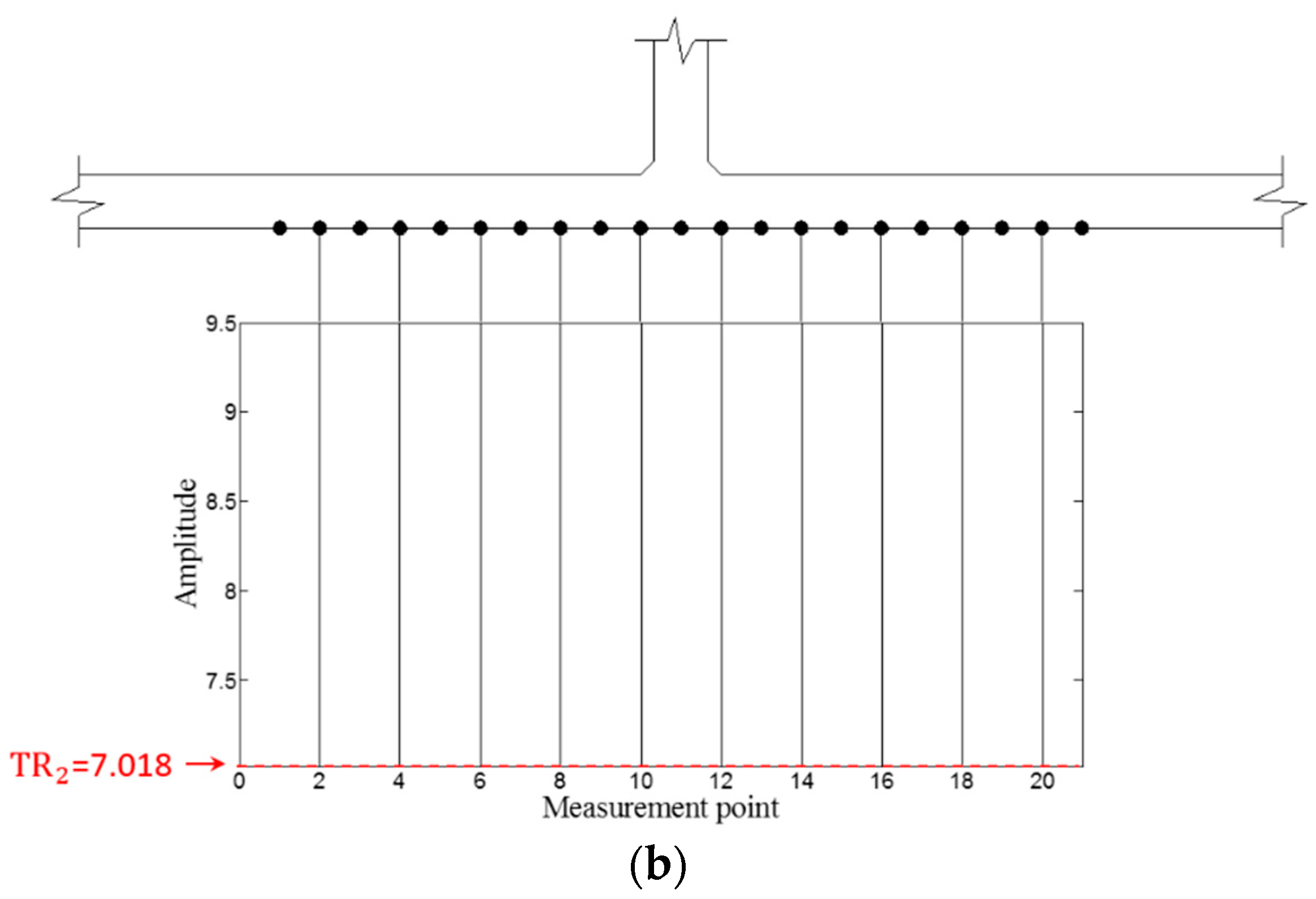
3.2.2. Crack Localization
4. Experimental Validation
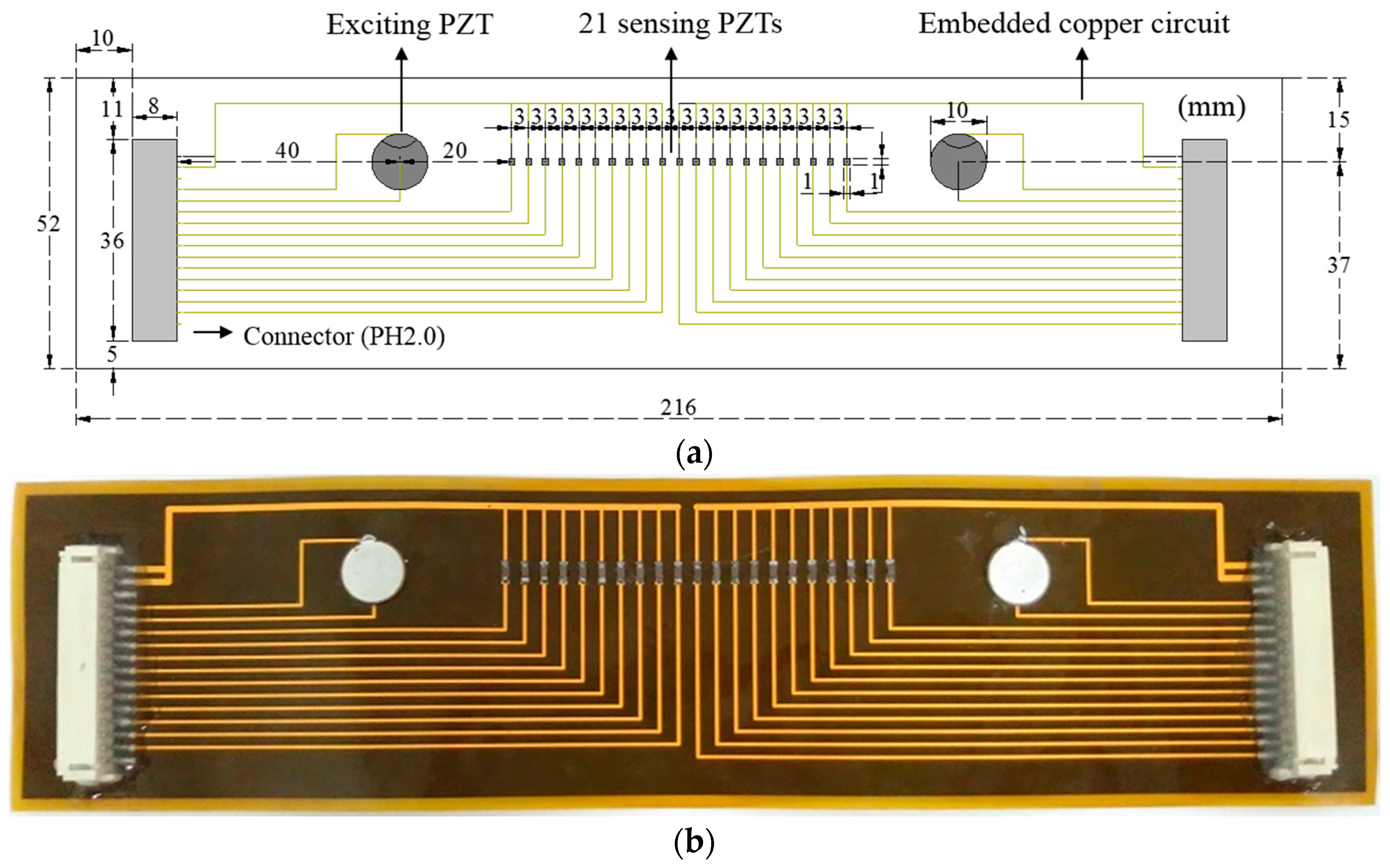
4.1. Development of a Stripe-PZT Sensor
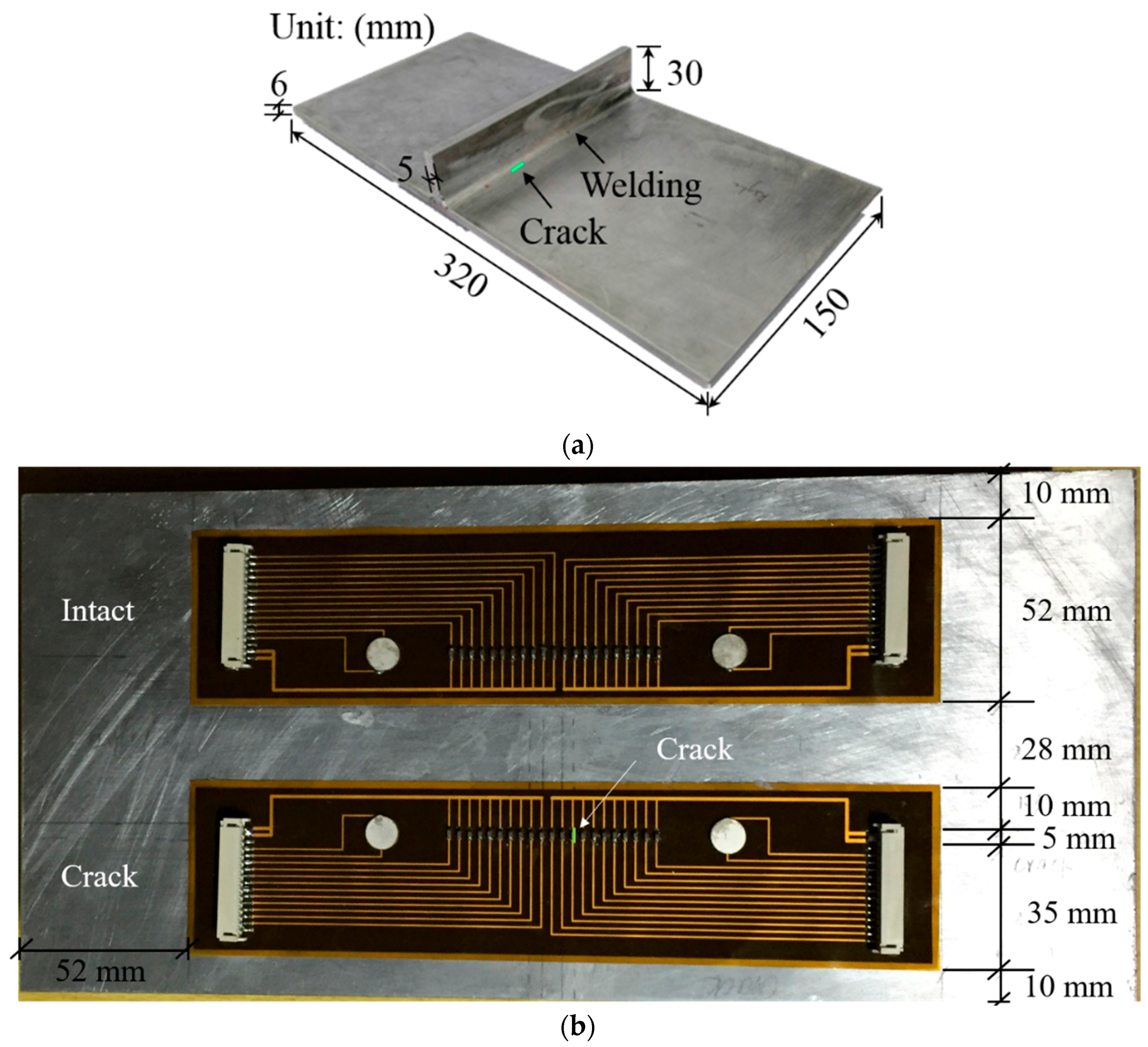
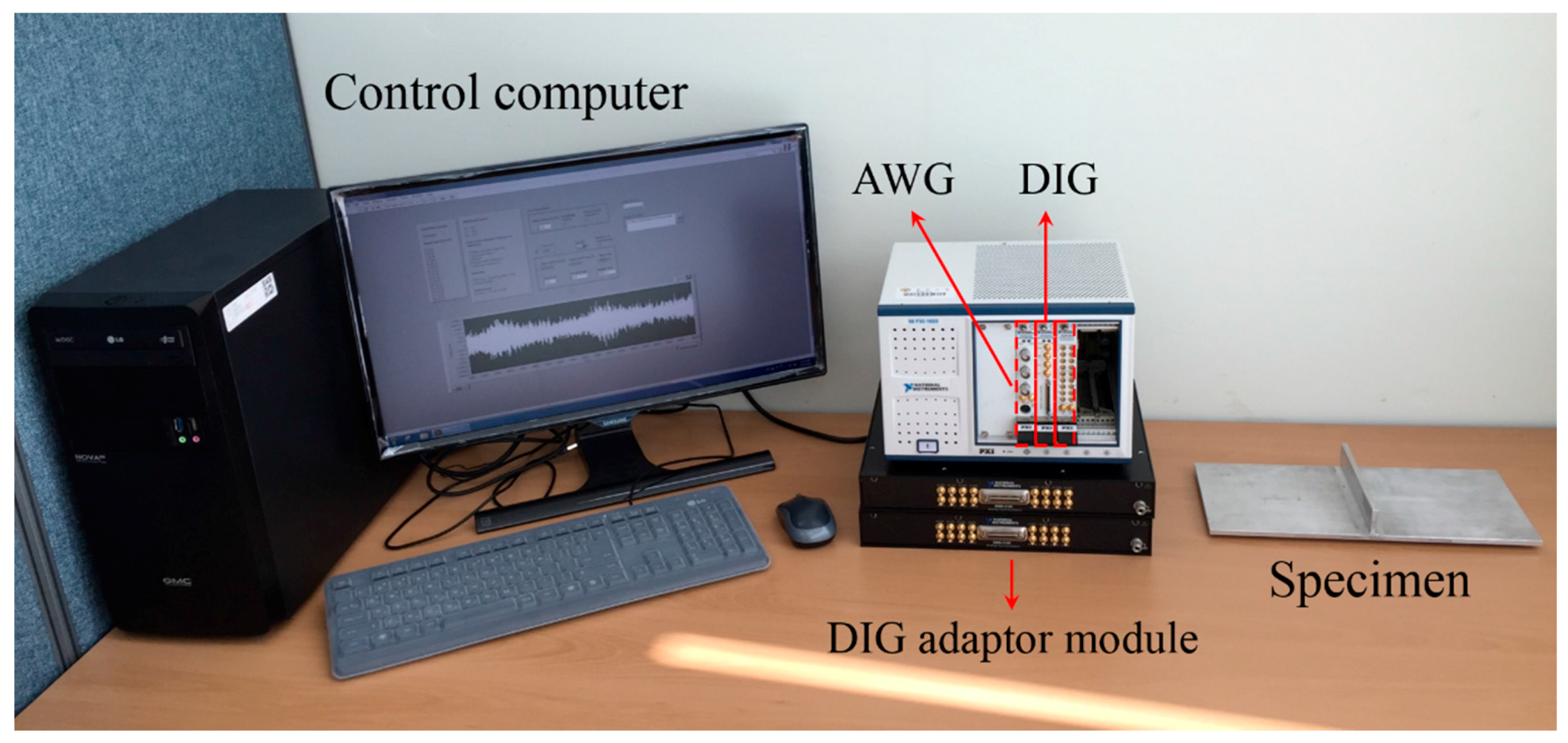
4.2. Description of Experimental Setup
4.3. Experimental Results
4.3.1. Crack Identification
4.3.2. Crack Localization
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Raghavan, A.; Cesnik, C.E.S. Review of guided-wave structural health monitoring. Shock Vib. Dig. 2007, 39, 91–114. [Google Scholar] [CrossRef]
- Ihn, J.B.; Chang, F.K. Detection and monitoring of hidden fatigue crack growth using a built-in piezoelectric sensor/actuator network: II. Validation using riveted joints and repair patches. Smart Mater. Struct. 2004, 13, 609–620. [Google Scholar] [CrossRef]
- Fromme, P.; Wilcox, P.D.; Lowe, M.J.S.; Cawley, P. On the development and testing of a guided ultrasonic wave array for structural integrity monitoring. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2006, 53, 777–784. [Google Scholar] [CrossRef] [PubMed]
- An, Y.K.; Lim, H.J.; Kim, M.K.; Yang, J.; Sohn, H.; Lee, C. Application of local reference-free damage detection techniques to in situ in situ bridges. J. Struct. Eng. 2013, 140, 04013069. [Google Scholar] [CrossRef]
- Pfeil, M.S.; Battista, R.C.; Mergulhão, A.J.R. Stress concentration in steel bridge orthotropic decks. J. Constr. Steel Res. 2005, 61, 1172–1184. [Google Scholar] [CrossRef]
- Sargent, J.P. Corrosion detection in welds and heat-affected zones using ultrasonic Lamb waves. Insight-Non-Destr. Test. Cond. Monit. 2006, 48, 160–167. [Google Scholar] [CrossRef]
- Grondel, S.; Assaad, J.; Delebarre, C.; Moulin, E. Health monitoring of a composite wingbox structure. Ultrasonics 2004, 42, 819–824. [Google Scholar] [CrossRef] [PubMed]
- Arone, M.; Cerniglia, D.; Nigrelli, V. Defect characterization in Al welded joints by non-contact Lamb wave technique. J. Mater. Process. Technol. 2006, 176, 95–101. [Google Scholar] [CrossRef]
- Carvalho, A.A.; Rebello, J.M.A.; Sagrilo, L.V.S.; Camerini, C.S.; Miranda, I.V.J. MFL signal and artificial neural networks applied to detection and classification of pipe weld defects. NDT E Int. 2006, 39, 661–667. [Google Scholar] [CrossRef]
- An, Y.K.; Sohn, H. Instantaneous crack detection under varying temperature and static loading conditions. Struct. Control Health Monit. 2010, 17, 730–741. [Google Scholar] [CrossRef]
- Ruzzene, M. Frequency-wavenumber domain filtering for improved damage visualization. Smart Mater. Struct. 2007, 16, 2116. [Google Scholar] [CrossRef]
- Michaels, T.E.; Michaels, J.E.; Ruzzene, M. Frequency-wavenumber domain analysis of guided wavefields. Ultrasonics 2011, 51, 452–466. [Google Scholar] [CrossRef] [PubMed]
- An, Y.K.; Kim, J.H.; Yim, H.J. Lamb Wave Line Sensing for Crack Detection in a Welded Stiffener. Sensors 2014, 14, 12871–12884. [Google Scholar] [CrossRef] [PubMed]
- An, Y.K. Measurement of crack-induced non-propagating Lamb wave modes under varying crack widths. Int. J. Solids Struct. 2015, 62, 134–143. [Google Scholar] [CrossRef]
- An, Y.K.; Sohn, H. Visualization of non-propagating Lamb wave modes for fatigue crack evaluation. J. Appl. Phys. 2015, 117, 114904. [Google Scholar] [CrossRef]
- Rose, J.L. Ultrasonic Waves in Solid Media; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Sohn, H.; Dutta, D.; Yang, J.Y.; DeSimio, M.; Olson, S.; Swenson, E. Automated detection of delamination and disbond from wavefield images obtained using a scanning laser vibrometer. Smart Mater. Struct. 2011, 20, 045017. [Google Scholar] [CrossRef]
- An, Y.K.; Park, B.; Sohn, H. Complete noncontact laser ultrasonic imaging for automated crack visualization in a plate. Smart Mater. Struct. 2013, 22, 025022. [Google Scholar] [CrossRef]
- Achenbach, J.D. Reciprocity in Elastodynamics; Cambridge University Press: Cambridge, UK, 2003. [Google Scholar]
- An, Y.K.; Kwon, Y.; Sohn, H. Noncontact laser ultrasonic crack detection for plates with additional structural complexities. Struct. Health Monit. 2013, 12, 522–538. [Google Scholar] [CrossRef]
- Harb, M.; Yuan, F.G. Impact Damage Imaging Using Non-contact ACT/LDV System. Struct. Health Monit. 2015, 15. [Google Scholar] [CrossRef]
- Analysis User’s Guide; Version A. 6.13; Dassault Systems: Paris, France, 2013.
- APC International, Ltd. Piezoelectric Ceramics: Principles and Applications; APC International: Mackeyville, PA, USA, 2002. [Google Scholar]
- Diligent, O.; Lowe, M.J.S.; Le Clezio, E.; Castaings, M.; Hosten, B. Prediction and measurement of nonpropagating Lamb modes at the free end of a plate when the fundamental antisymmetric mode A0 is incident. J. Acoust. Soc. Am. 2003, 113, 3032–3042. [Google Scholar] [CrossRef] [PubMed]
- Castaings, M.; Le Clezio, E.; Hosten, B. Modal decomposition method for modeling the interaction of Lamb waves with cracks. J. Acoust. Soc. Am. 2002, 112, 2567–2582. [Google Scholar] [CrossRef] [PubMed]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (1) | Crack on the PZT A side |
| (2) | Crack on the PZT B side |
| (3) | No crack |
| ρ (kg/m3) | CL (m/s) | CT (m/s) | E (GPa) | υ |
|---|---|---|---|---|
| 2620.4 | 6291 | 3170 | 70 | 0.33 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
An, Y.-K.; Shen, Z.; Wu, Z. Stripe-PZT Sensor-Based Baseline-Free Crack Diagnosis in a Structure with a Welded Stiffener. Sensors 2016, 16, 1511. https://doi.org/10.3390/s16091511
An Y-K, Shen Z, Wu Z. Stripe-PZT Sensor-Based Baseline-Free Crack Diagnosis in a Structure with a Welded Stiffener. Sensors. 2016; 16(9):1511. https://doi.org/10.3390/s16091511
Chicago/Turabian StyleAn, Yun-Kyu, Zhiqi Shen, and Zhishen Wu. 2016. "Stripe-PZT Sensor-Based Baseline-Free Crack Diagnosis in a Structure with a Welded Stiffener" Sensors 16, no. 9: 1511. https://doi.org/10.3390/s16091511
APA StyleAn, Y.-K., Shen, Z., & Wu, Z. (2016). Stripe-PZT Sensor-Based Baseline-Free Crack Diagnosis in a Structure with a Welded Stiffener. Sensors, 16(9), 1511. https://doi.org/10.3390/s16091511