
An Effective Cuckoo Search Algorithm for Node Localization in Wireless Sensor Network


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Standard Cuckoo Search Algorithm
- (1)
- Each cuckoo lays one egg at a time, and dumps its egg in a randomly chosen nest;
- (2)
- The best nests with high-quality eggs will be carried over to the next generations;
- (3)
- The number of available host nests is fixed, and the egg laid by a cuckoo is discovered by the host bird with a probability . In this case, the host bird can either get rid of the egg, or simply abandon the nest and build a completely new nest.
3. Modified Cuckoo Search (CS) Algorithm
| Algorithm 1. Modified CS algorithm |
| 1. Begin |
| 2. Generate initial population of n nests (solutions) , i = 1, 2, …, n |
| 3. Define objective function f(x); x = (x1, x2, …, xd); |
| 4. Set the range of and : , , , |
| 5. Set the range of the nest(solution): , |
| 6. Set the maximum number of iterations: N_itertotal |
| 7. For all do |
| 8. Calculate the fitness |
| 9. End For |
| 10. N_iter = 1 |
| 11. While (N_iter < N_itertotal) do |
| 12. For all do |
| 13. Compute the step size for flight using Equation (6) |
| 14. Generate a new cuckoo () from the nest randomly by taking Lévy flight |
| 15. If () then |
| 16. |
| 17. End If |
| 18. If () then |
| 19. |
| 20. End If |
| 21. Calculate the fitness |
| 22. Choose a random nest () among n nest randomly |
| 23. If () then |
| 24. |
| 25. |
| 26. End If |
| 27. End For |
| 28. Keep the current global optimal fitness: |
| 29. Compute the probability using Equation (7) |
| 30. A fraction () of worse nests abandoned and new ones/solutions are built/generated correspondingly |
| 31. For all the nests (say, ) to be built/generated do |
| 32. If () then |
| 33. |
| 34. End If |
| 35. If () then |
| 36. |
| 37. End If |
| 38. Calculate the fitness and evaluate its quality/fitness |
| 39. Keep best solutions (or nests with quality solutions) |
| 40. End For |
| 41. Rank all the solutions and find the current best |
| 42. End While |
| 43. End |
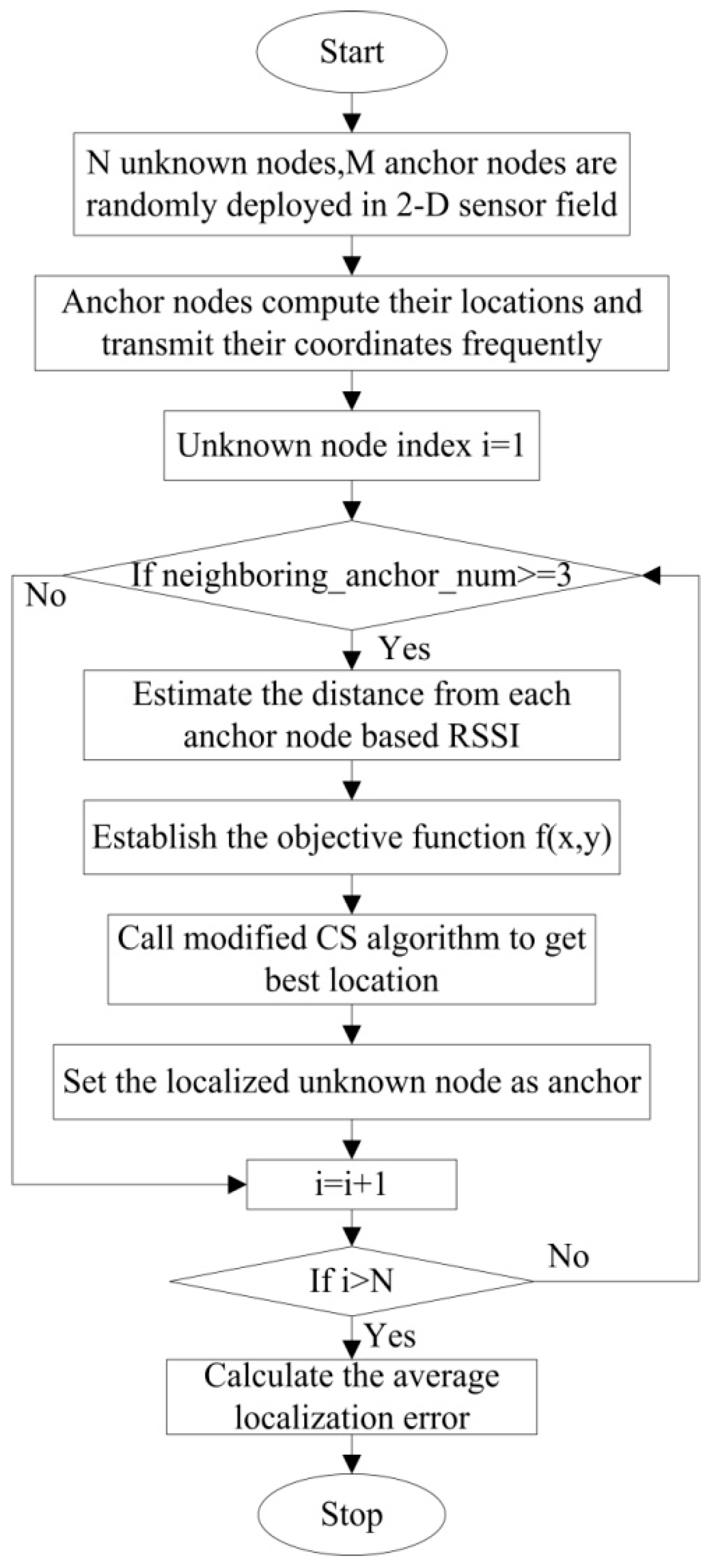
4. WSN Node Localization Process Based on the Modified CS Algorithm
- Step 1:
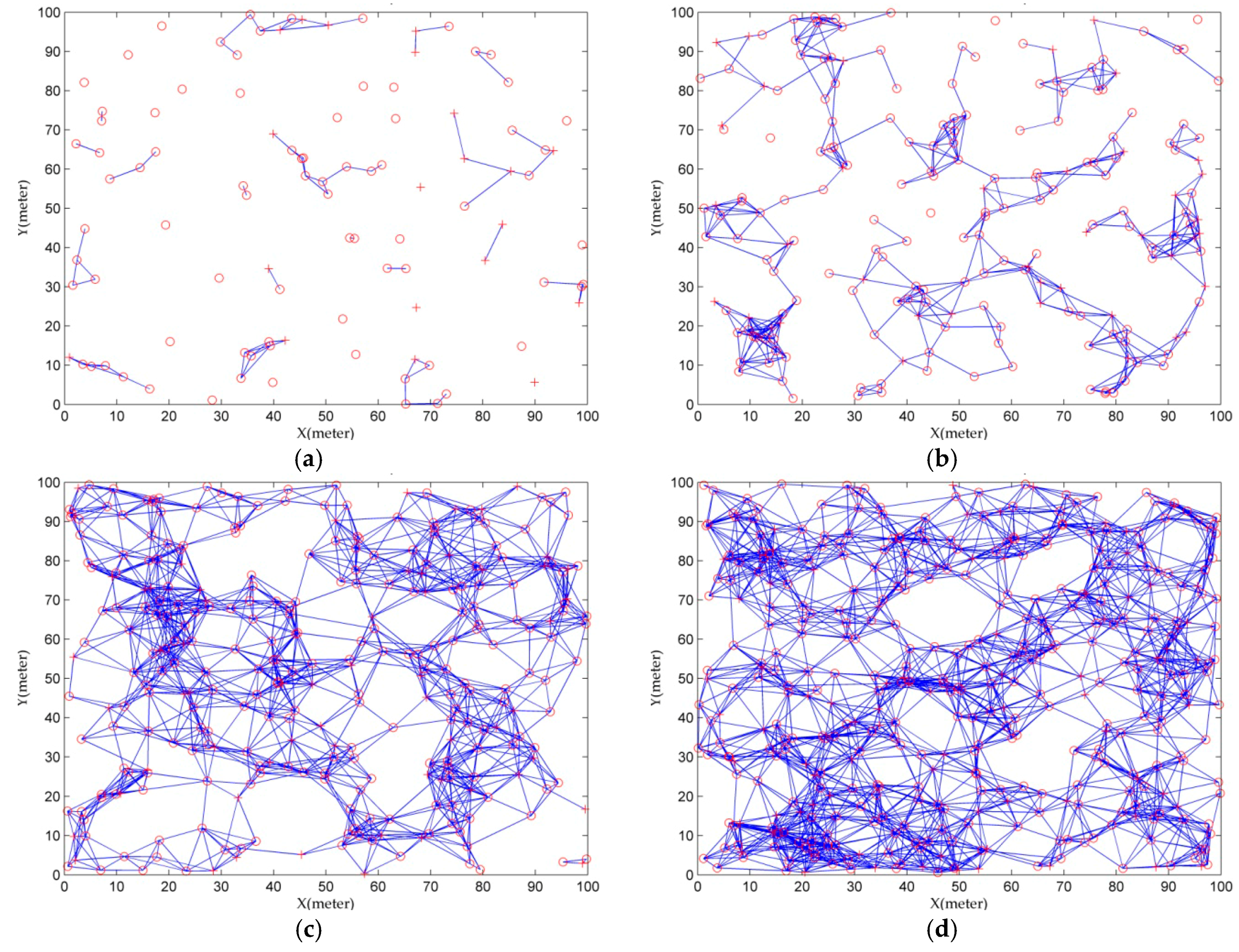
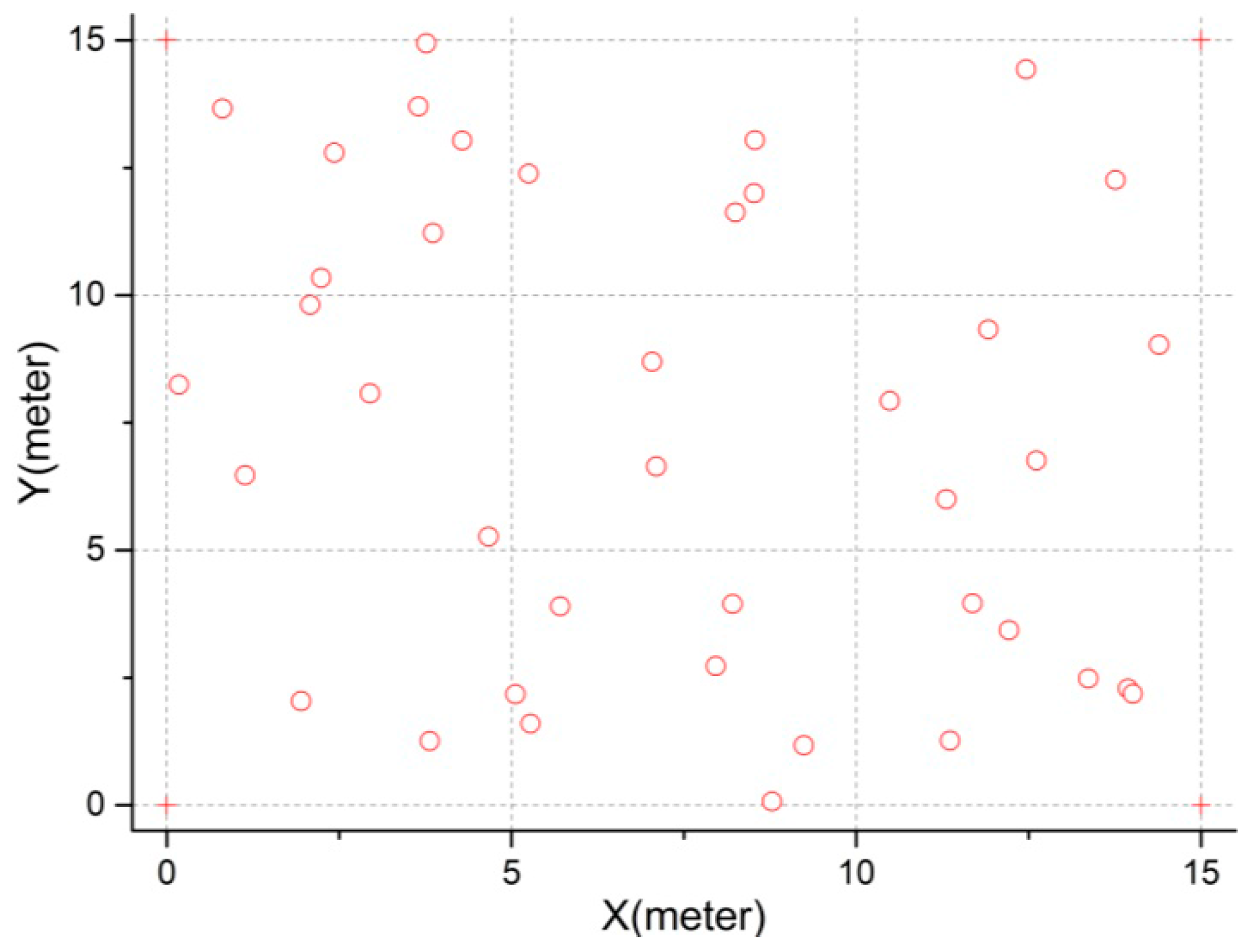
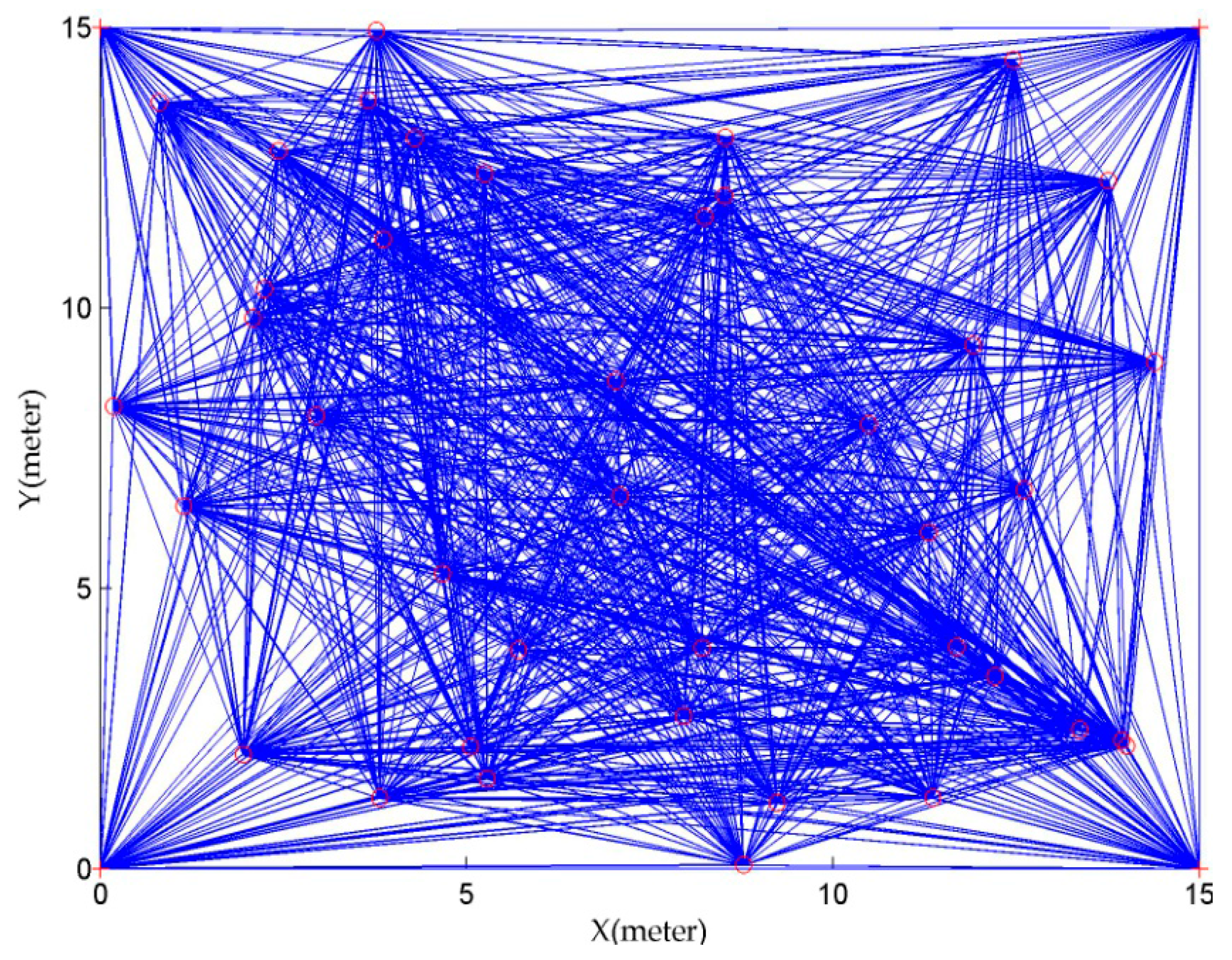
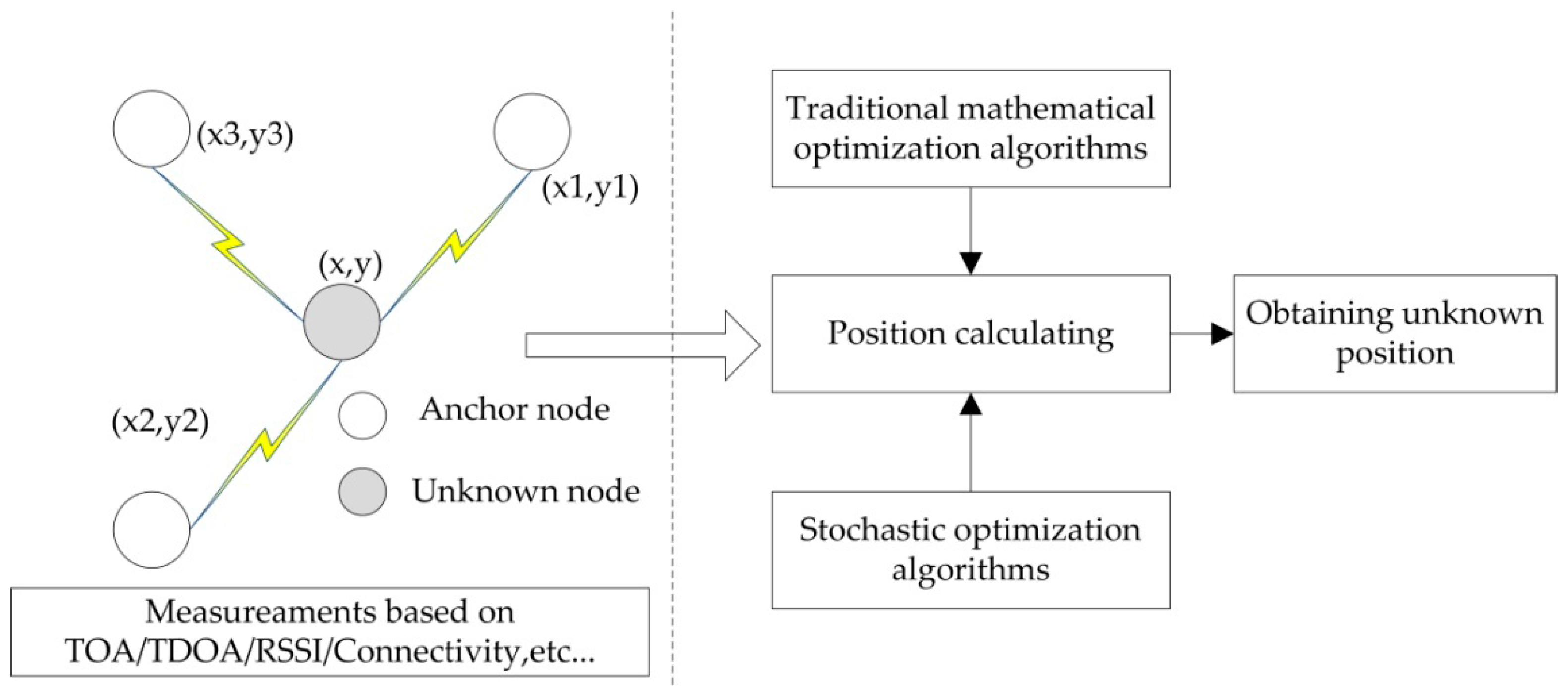
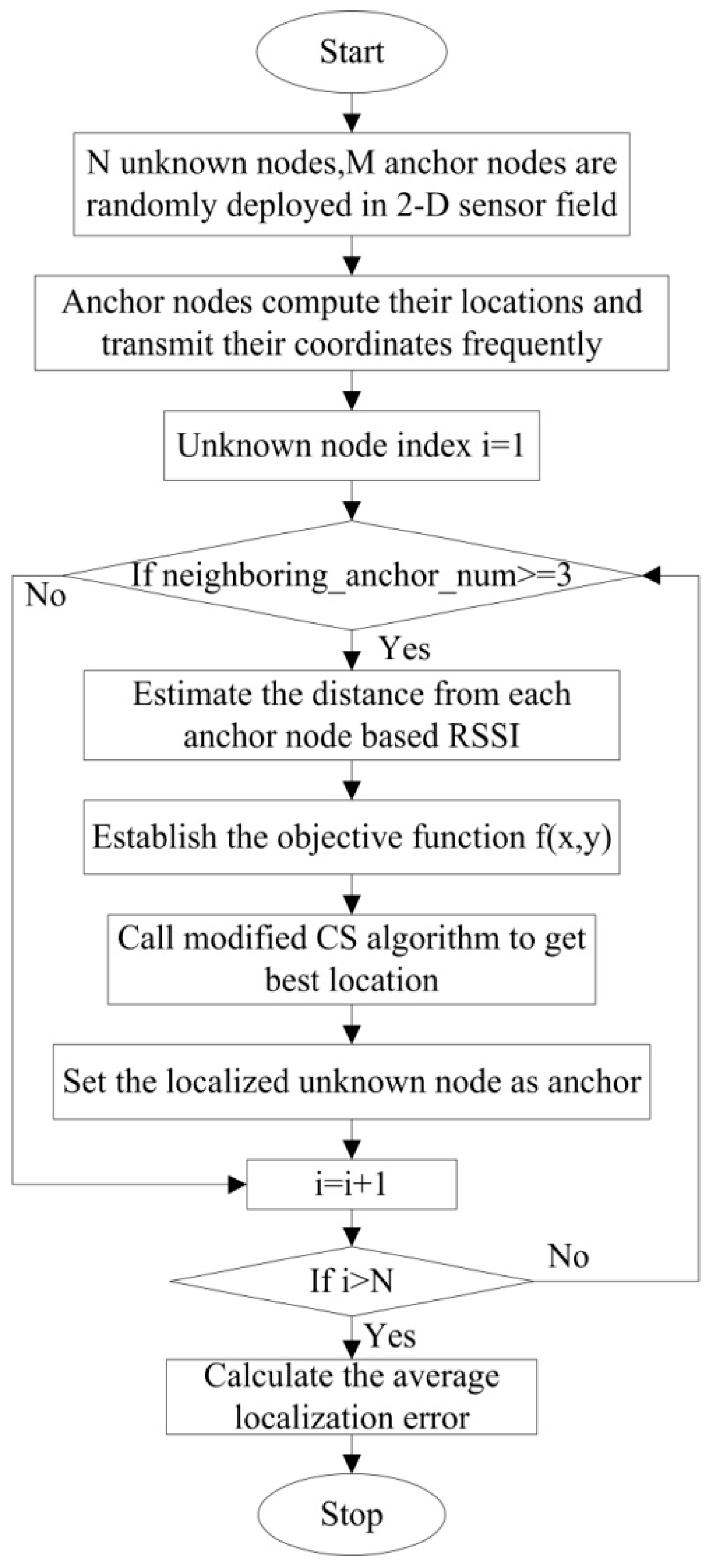
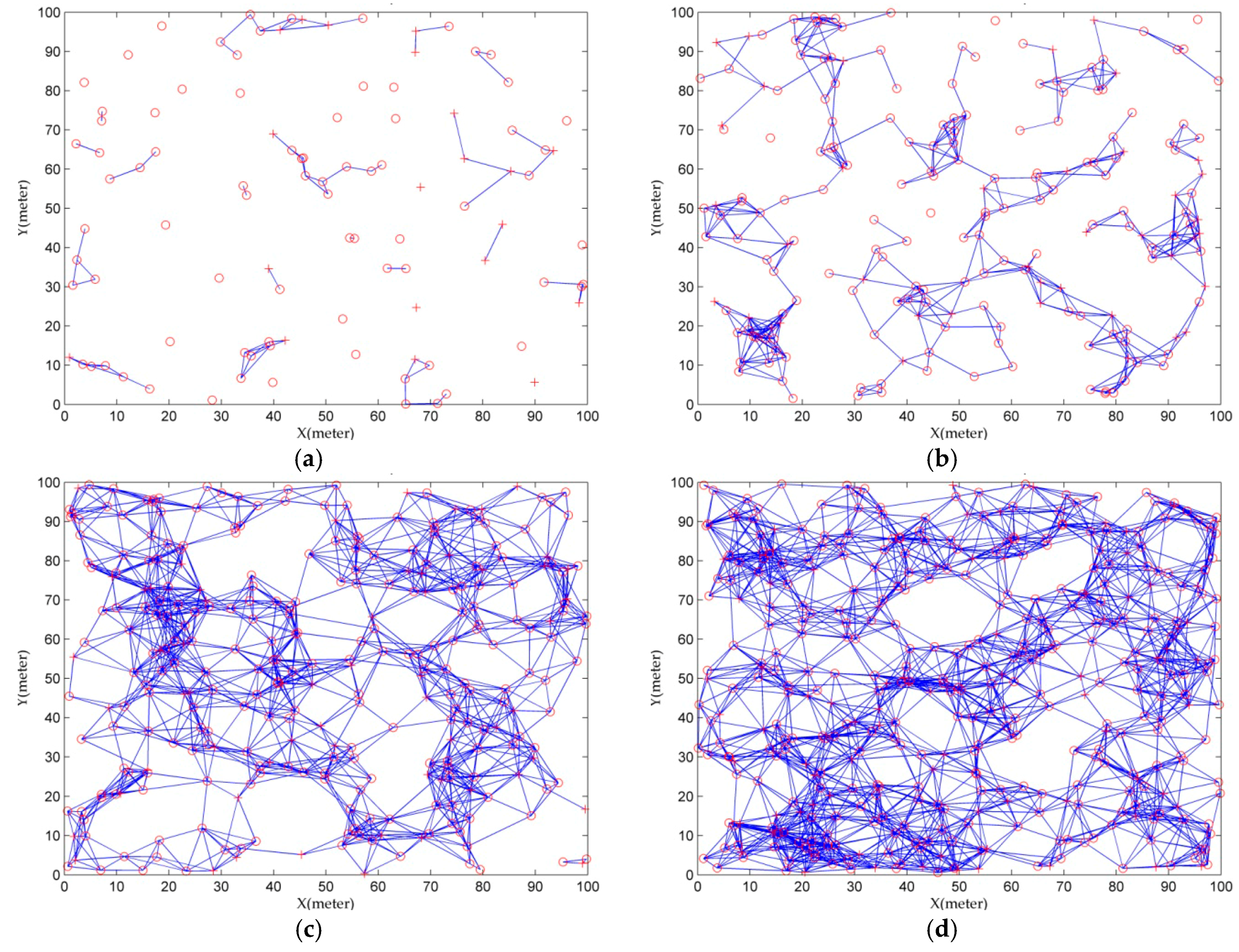
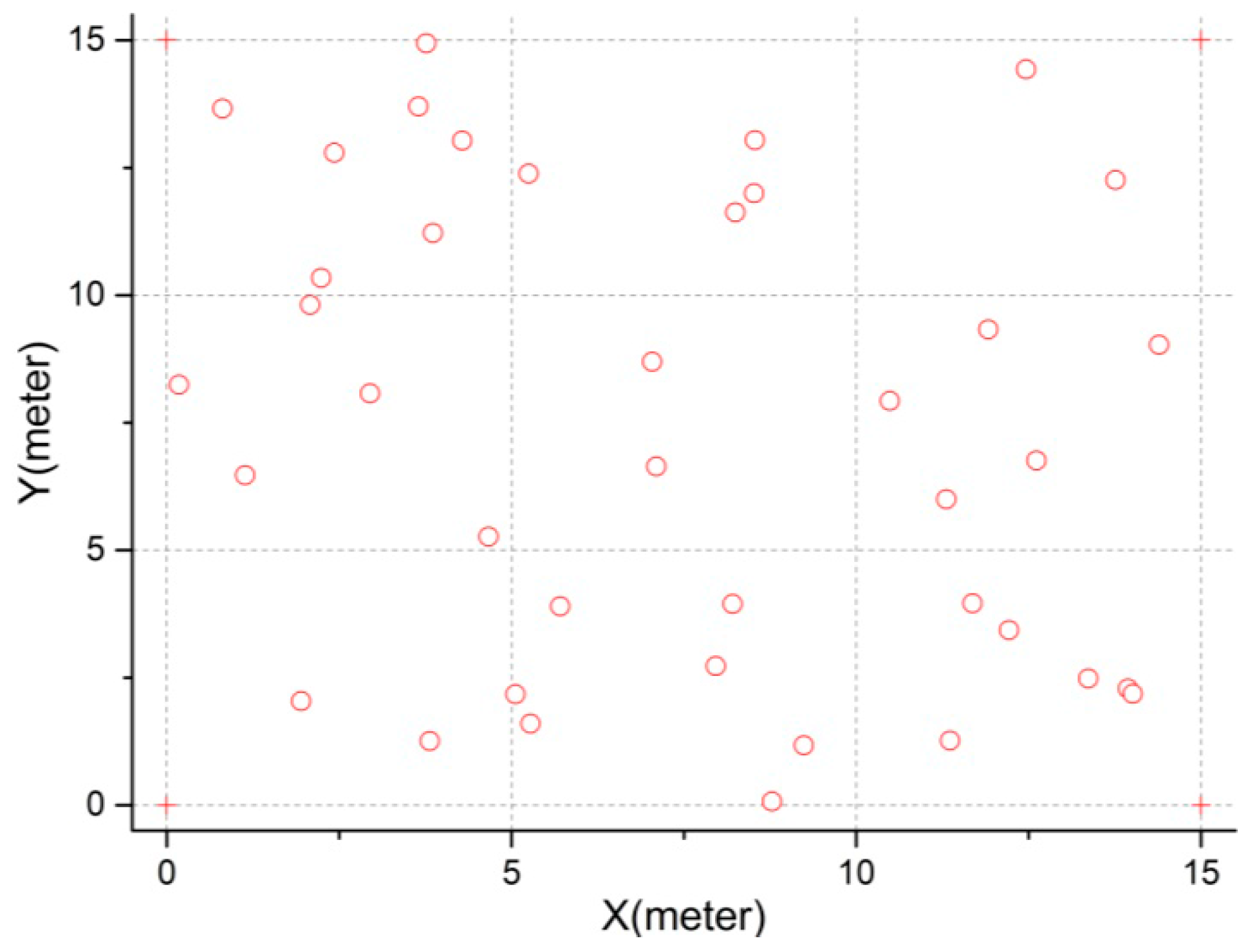
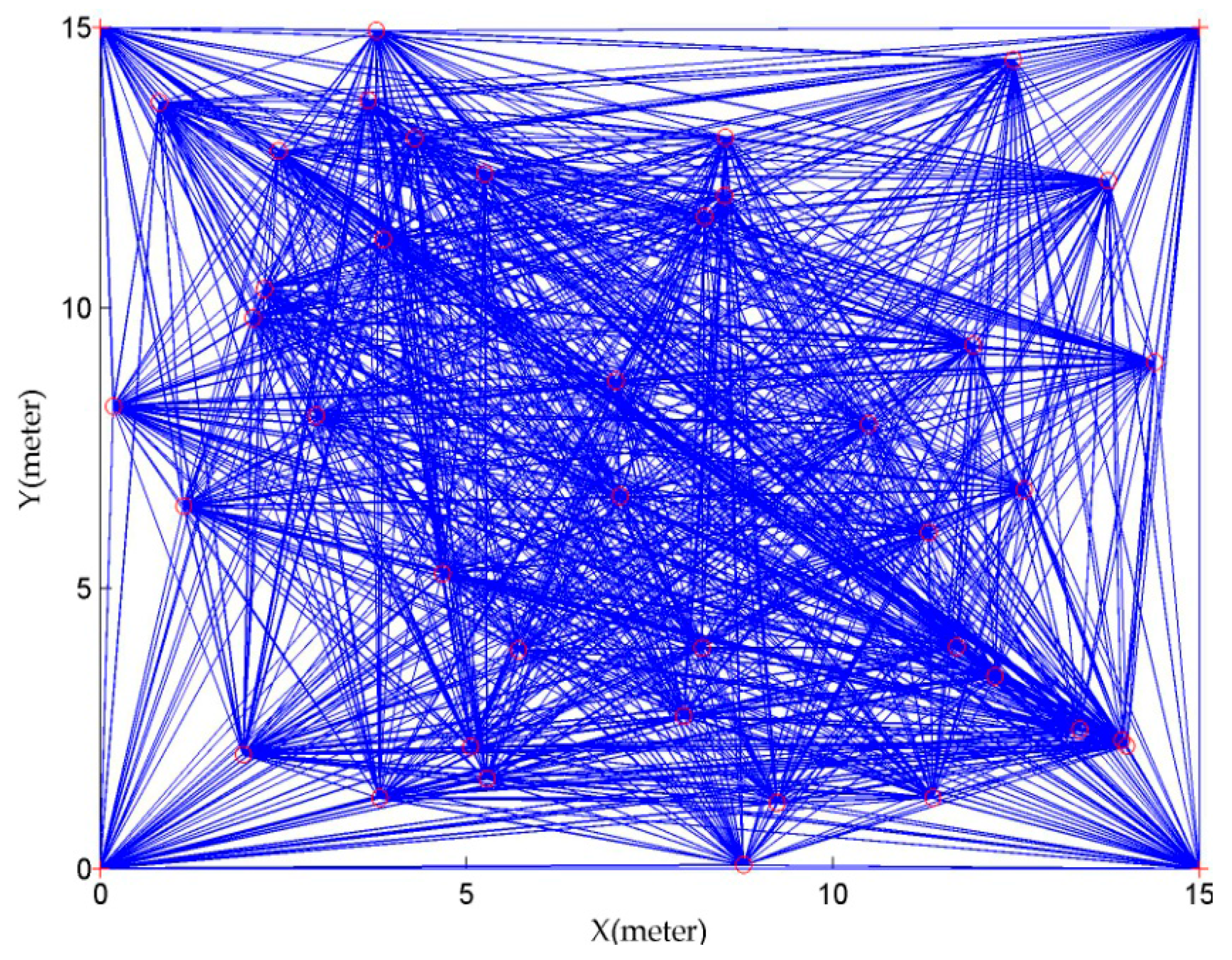
- M anchor nodes and N unknown nodes are randomly deployed in a sensor field. The communication range for each sensor node is set to R.
- Step 2:
- Anchor nodes broadcast their locations frequently.
- Step 3:
- If unknown node has three or more than three anchors within communication range, it will be considered to be localizable. Owing to RSSI (received signal strength indicator) of simple implementation and low cost in hardware under actual deployment scenario, in this paper, we assume that distance measurement between neighboring nodes is realized based on RSSI that can then be transferred into equivalent distances for positioning intersection. However, RSSI-based ranging is usually affected by multi-path and obstacles blocking, which can be modeled as log-normal shadowing. The result of the log-normal model is that RSSI-based distance estimates have ranging error which follows a zero-mean Gaussian distribution with variance . In addition, the standard deviation of ranging error is proportional to the actual distance between node and [8,10], as shown in the Equation (8).where noise factor is set to 0.1 in the experiment, is the real distance between the unknown node and anchor within communication range, such as the Equation (9).The measured distance between unknown node and anchor node is modeled using Equation (10).where represents ranging error between unknown node and its neighboring anchor node . Meanwhile in this paper, we assume that the random ranging error different from each other, that is to say, if , .
- Step 4:
- Establishing the objective function . The objective function representing mean of square of ranging error between the unknown node and anchors, is defined as Equation (11):where is the number of anchor nodes within communication range, the unknown node can estimate its coordinate by running the modified CS algorithm. That is, when the objective function is minimized, corresponding is the position of unknown node.
- Step 5:
- The unknown nodes that get localized will act as anchors in the next iteration, thus the number of anchors increase along with the iteration progress.
- Step 6:
- Step 2~Step 5 are conducted repeatedly until no unknown nodes can be localized or termination conditions are reached.
- Step 7:
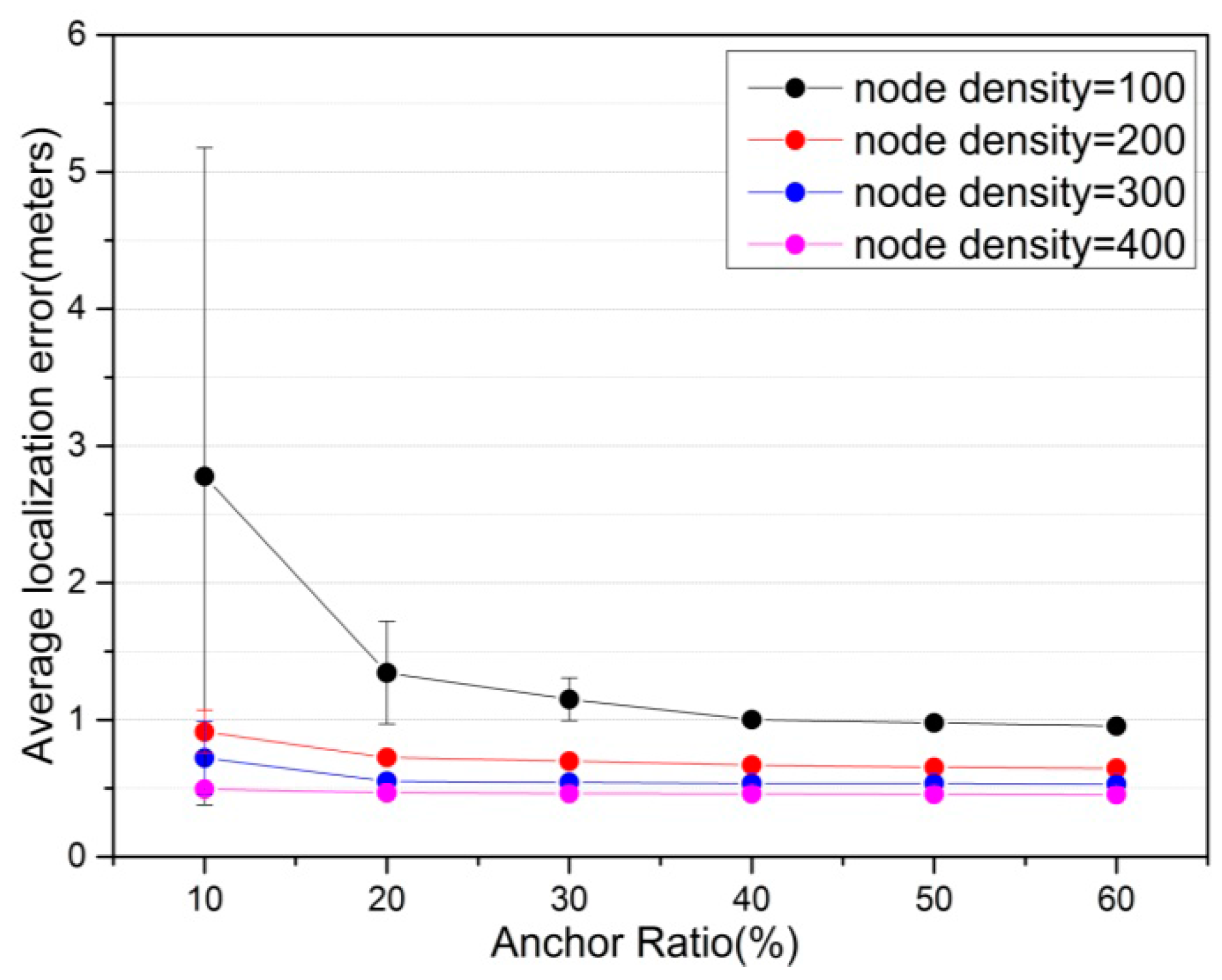
- Computing the average localization error. The average localization error is defined as the average Euclidean distance between the real and estimated locations of sensor nodes, thus average localization error can be calculated via the following Equation (12).where is the number of localized node, is the computed node location and is the actual node location. The smaller average localization error, the better the localization performance.
5. Simulation Experiments and Performance Evaluation
5.1. Simulation Setup
5.2. Experimental Results and Performance Analysis
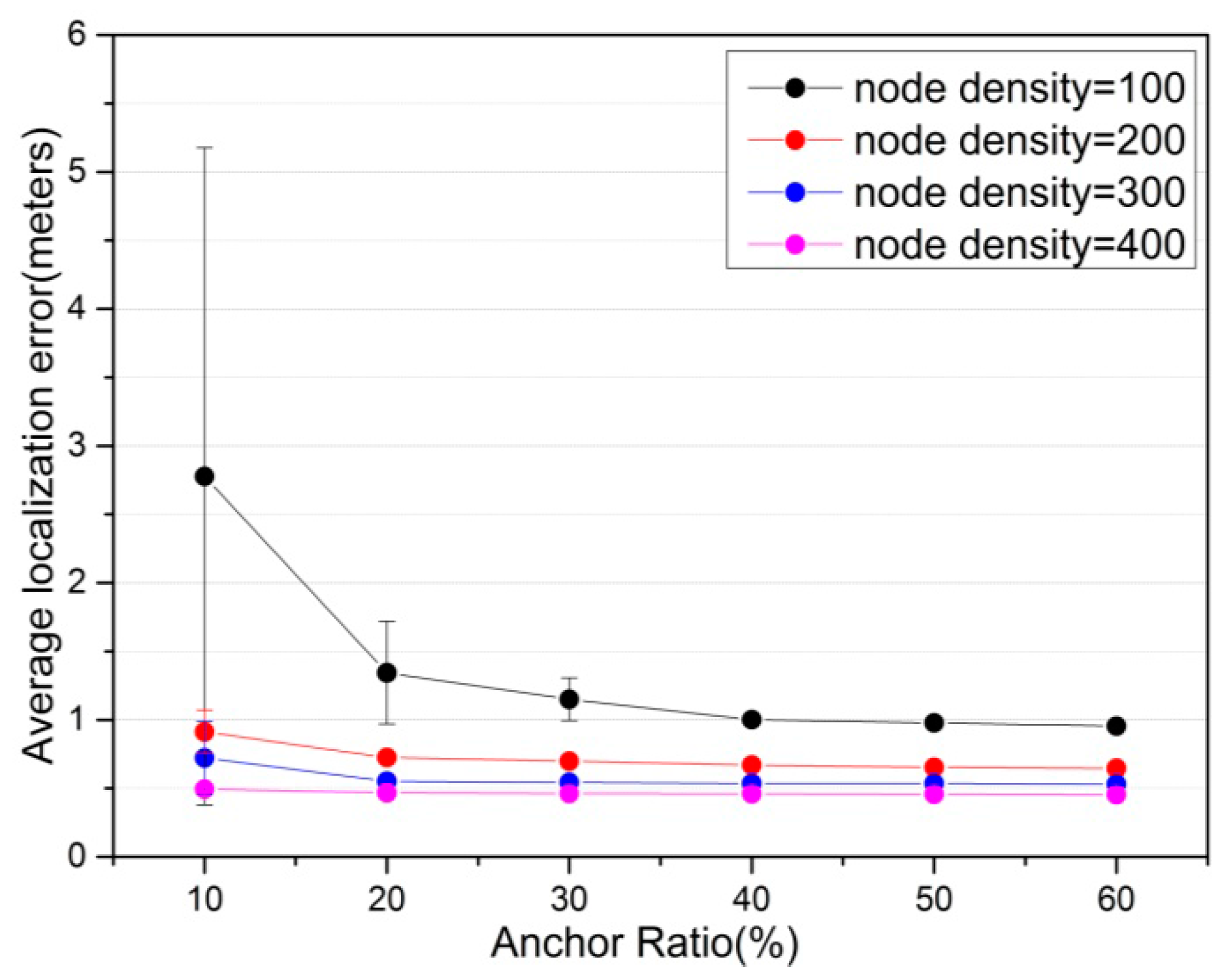
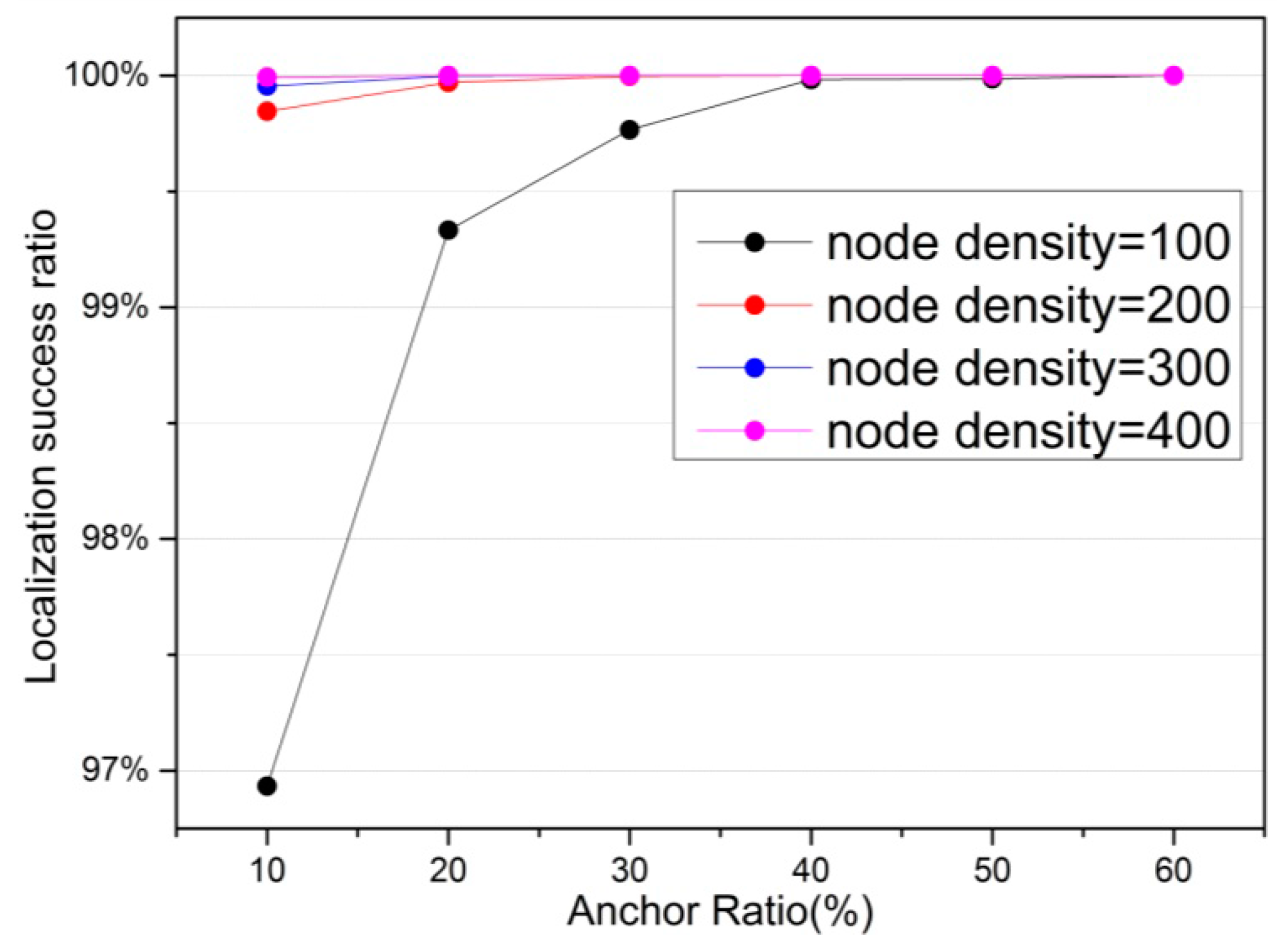
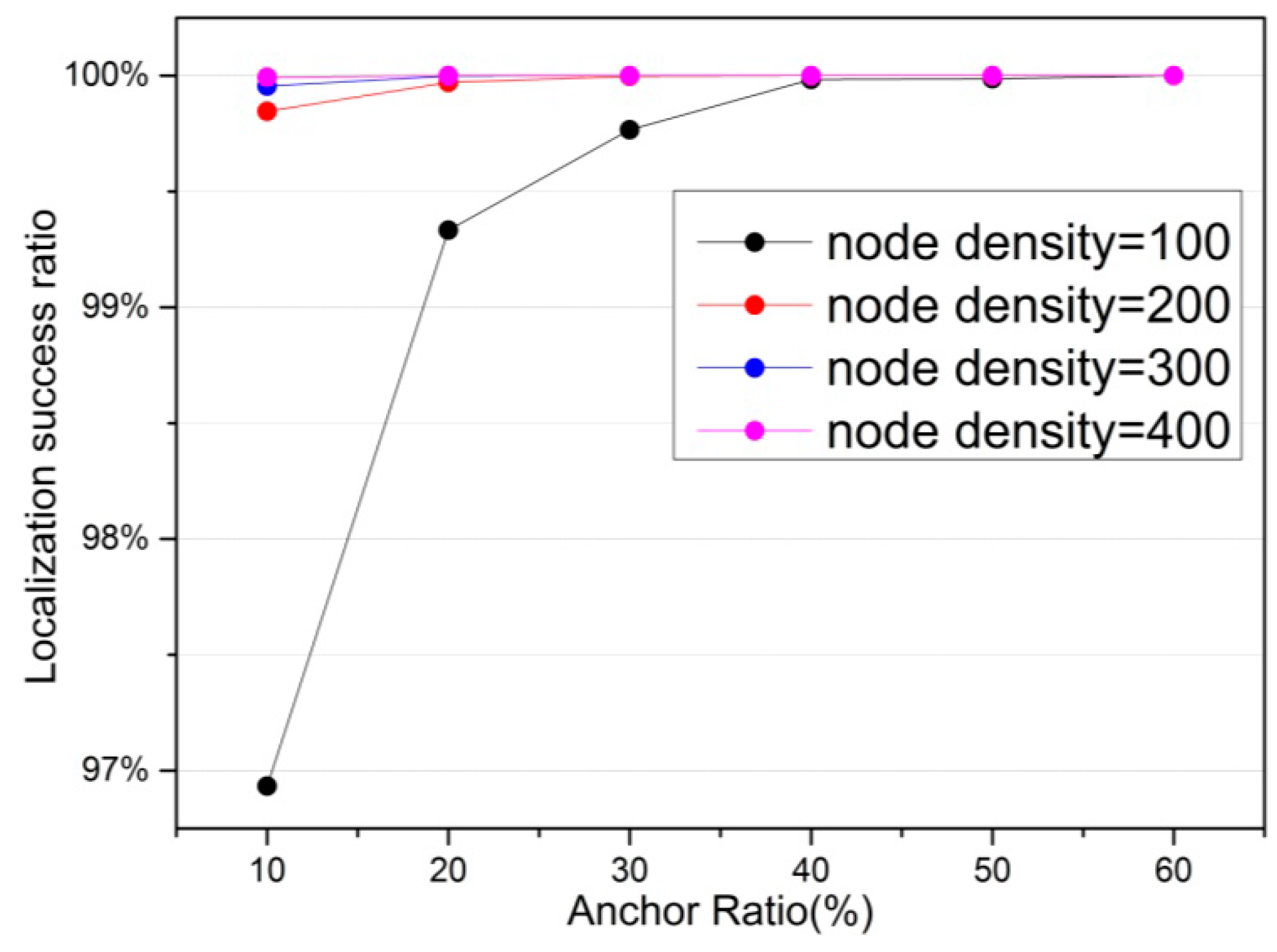
5.2.1. The Effect of Anchor Density
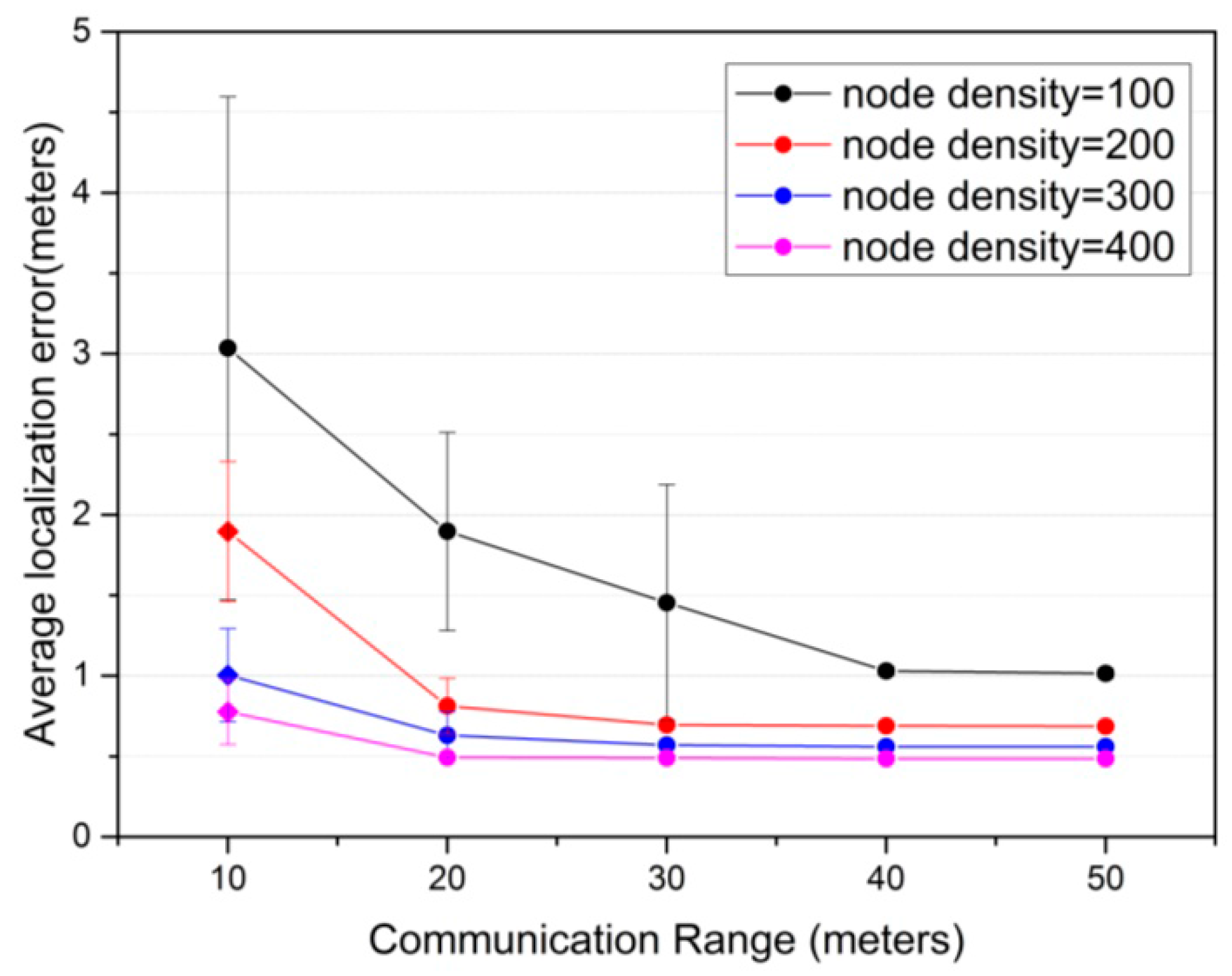
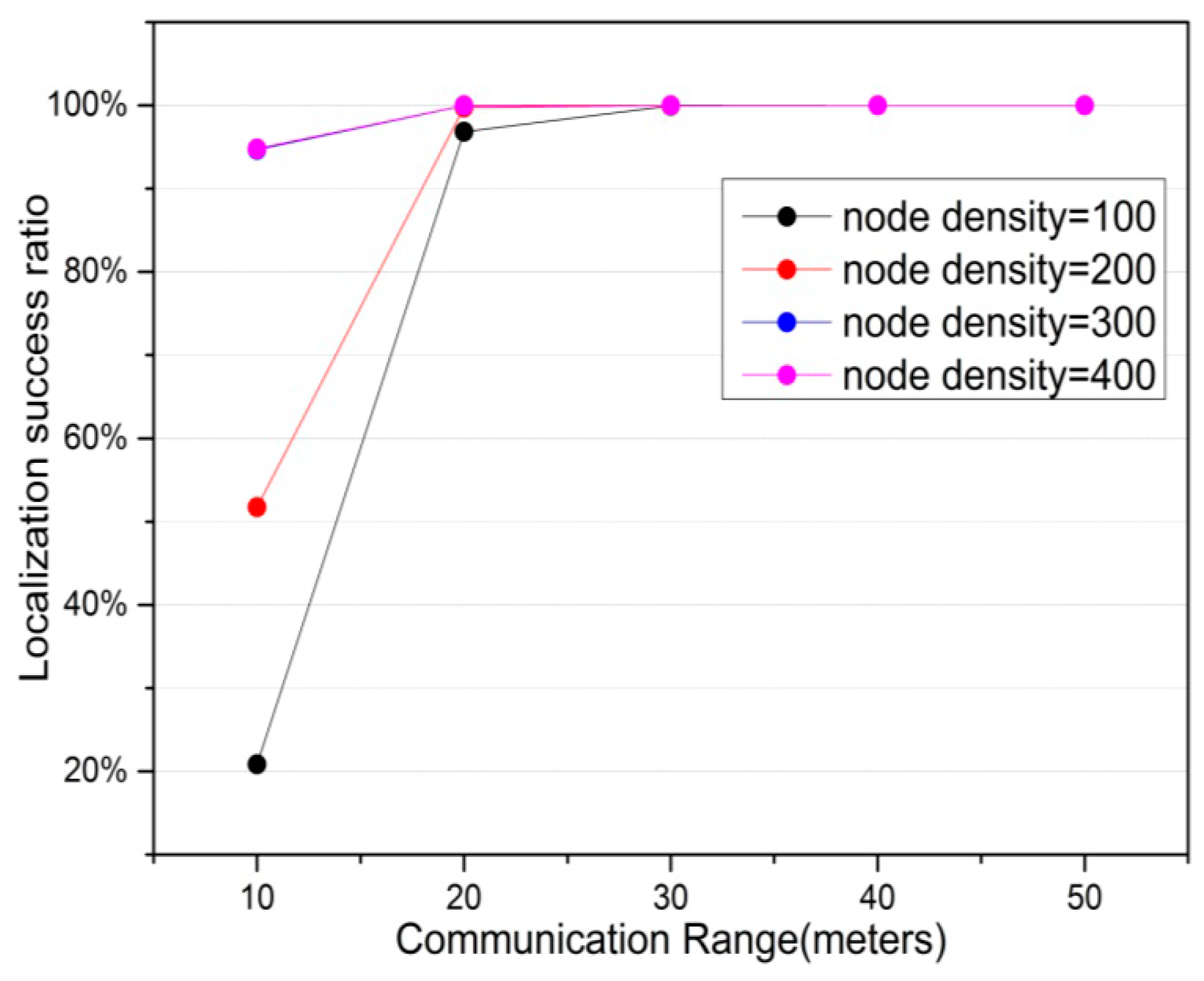
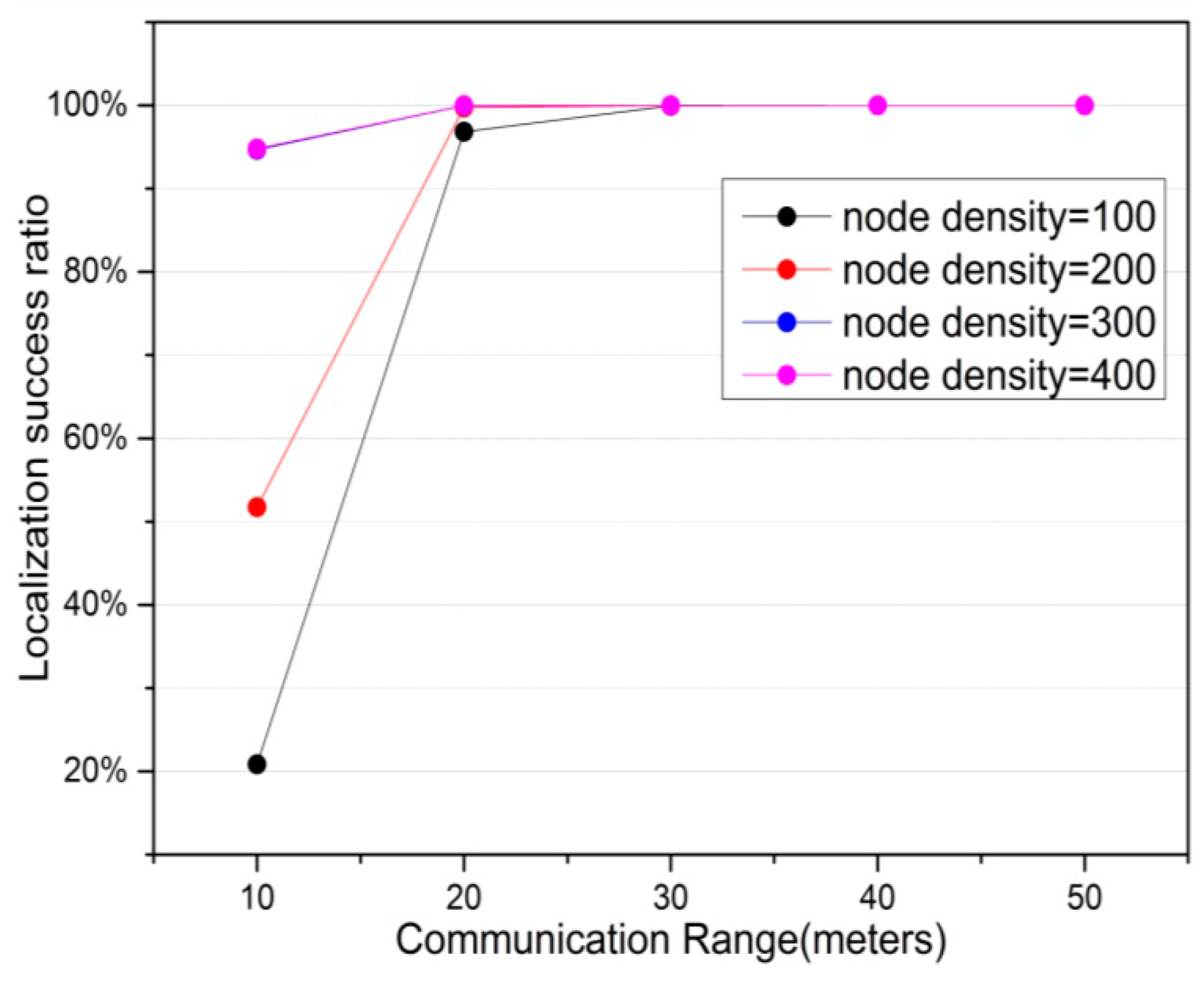
5.2.2. The Effect of Communication Range
5.2.3. Comparison with Standard CS and PSO Algorithm
- (1)
- Population size = 20;
- (2)
- Acceleration constants c1 = c2 = 2;
- (3)
- Inertia weight w = 0.7;
- (4)
- Limits on particle velocity: = 15 m/s, = –15 m/s.
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Akyildiz, I.F.; Su, W.; Sankarasubramaniam, Y.; Cayirci, E. Wireless sensor networks: A survey. Comput. Netw. 2002, 38, 393–422. [Google Scholar] [CrossRef]
- Kim, S.; Pakzad, S.; Culler, D.; Demmel, J.; Fenves, G.; Glaser, S.; Turon, M. Health Monitoring of Civil Infrastructures Using Wireless Sensor Networks. In Proceedings of the 6th International Symposium on Information Processing in Sensor Networks, Cambridge, MA, USA, 25–27 April 2007; pp. 254–263.
- Da Silva, V.B.C.; Sciammarella, T.; Campista, M.E.M.; Costa, L.H.M.K. A Public Transportation Monitoring System Using IEEE 802.11 Networks. In Proceedings of the IEEE Computer Networks and Distributed Systems, Florianopolis, Brazil, 5–9 May 2014; pp. 451–459.
- Suryadevara, N.K.; Mukhopadhyay, S.C.; Kelly, S.D.T.; Gill, S.P.S. WSN-Based Smart Sensors and Actuator for Power Management in Intelligent Buildings. IEEE/ASME Trans. Mechatron. 2015, 20, 564–571. [Google Scholar] [CrossRef]
- Garcia-Sanchez, A.J.; Garcia-Sanchez, F.; Losilla, F.; Kulakowski, P.; Garcia-Haro, J.; Rodríguez, A.; López-Bao, J.; Palomares, F. Wireless Sensor Network Deployment for Monitoring Wildlife Passages. Sensors 2010, 10, 7236–7262. [Google Scholar] [CrossRef] [PubMed]
- Aslan, Y.E.; Korpeoglu, I.; Ulusoy, Ö. A framework for use of wireless sensor networks in forest fire detection and monitoring. Comput. Environ. Urban Syst. 2012, 36, 614–625. [Google Scholar] [CrossRef]
- Huang, X.; Yi, J.; Chen, S.; Zhu, X. A Wireless Sensor Network-Based Approach with Decision Support for Monitoring Lake Water Quality. Sensors 2015, 15, 29273–29296. [Google Scholar] [CrossRef] [PubMed]
- Patwari, N.; Ash, J.N.; Kyperountas, S.; Hero, A.O.; Moses, R.L.; Correal, N.S. Locating the nodes: Cooperative localization in wireless sensor networks. IEEE Signal Process. Mag. 2005, 22, 54–69. [Google Scholar] [CrossRef]
- Bulusu, N.; Heidemann, J.; Estrin, D. GPS-less low-cost outdoor localization for very small devices. IEEE Pers. Commun. 2000, 7, 28–34. [Google Scholar] [CrossRef]
- Vecchio, M.; López-Valcarce, R.; Marcelloni, F. A two-objective evolutionary approach based on topological constraints for node localization in wireless sensor networks. Appl. Soft Comput. 2012, 12, 1891–1901. [Google Scholar] [CrossRef]
- Boukerche, A.; Oliveira, H.A.; Nakamura, E.F.; Loureiro, A.A.F. Localization systems for wireless sensor networks. IEEE Wirel. Commun. 2007, 14, 6–12. [Google Scholar] [CrossRef]
- Mao, G.; Fidan, B.; Anderson, B.D. Wireless sensor network localization techniques. Comput. Netw. 2007, 51, 2529–2553. [Google Scholar] [CrossRef]
- Pal, A. Localization algorithms in wireless sensor networks: Current approaches and future challenges. Netw. Protoc. Algorithms 2010, 2, 45–73. [Google Scholar] [CrossRef]
- Niculescu, D.; Nath, B. Ad hoc positioning system (APS). In Proceedings of the IEEE Global Telecommunications Conference, San Antonio, TX, USA, 25–29 November 2001; pp. 2926–2931.
- Rabaey, C.S.J.; Langendoen, K. Robust positioning algorithms for distributed ad-hoc wireless sensor networks. In Proceedings of the USENIX technical annual conference, Monterey, CA, USA, 10–15 June 2002; pp. 317–327.
- Doherty, L.; Pister, K.S.J.; El Ghaoui, L. Convex position estimation in wireless sensor networks. In Proceedings of the Twentieth Annual Joint Conference of the IEEE Computer and Communications Societies, Anchorage, AK, USA, 22–26 April 2001; pp. 1655–1663.
- Biswas, P.; Lian, T.C.; Wang, T.C.; Ye, Y. Semidefinite programming based algorithms for sensor network localization. ACM Trans. Sensors Netw. 2006, 2, 188–220. [Google Scholar] [CrossRef]
- Simonetto, A.; Leus, G. Distributed maximum likelihood sensor network localization. IEEE Trans. Signal Process. 2014, 62, 1424–1437. [Google Scholar] [CrossRef]
- Shang, Y.; Ruml, W. Improved MDS-based localization. In Proceedings of the Twenty-third Annual Joint Conference of the IEEE Computer and Communications Societies, Hong Kong, China, 7–11 March 2004; pp. 2640–2651.
- Simon, D. Biogeography-based optimization. IEEE Trans. Evolut. Comput. 2008, 12, 702–713. [Google Scholar] [CrossRef]
- Blum, C.; Roli, A. Metaheuristics in combinatorial optimization: Overview and conceptual comparison. ACM Comput. Surv. 2003, 35, 268–308. [Google Scholar] [CrossRef]
- Kulkarni, R.V.; Venayagamoorthy, G.K.; Cheng, M.X. Bio-inspired node localization in wireless sensor networks. In Proceedings of the IEEE International Conference on Systems, Man and Cybernetics, San Antonio, TX, USA, 11–14 October 2009; pp. 205–210.
- Kumar, A.; Khosla, A.; Saini, J.S.; Singh, S. Meta-heuristic range based node localization algorithm for Wireless Sensor Networks. In Proceedings of the IEEE International Conference on Localization and GNSS, Starnberg, Munich, Germany, 25–27 June 2012; pp. 1–7.
- Yun, S.; Lee, J.; Chung, W.; Kim, E.; Kim, S. A soft computing approach to localization in wireless sensor networks. Expert Syst. Appl. 2009, 36, 7552–7561. [Google Scholar] [CrossRef]
- Kannan, A.A.; Mao, G.; Vucetic, B. Simulated annealing based wireless sensor network localization with flip ambiguity mitigation. In Proceedings of the 63rd IEEE Vehicular Technology Conference, Melbourne, Australia, 7–10 May 2006; pp. 1022–1026.
- James, K.; Russell, E. Particle swarm optimization. In Proceedings of the IEEE International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; pp. 1942–1948.
- Chih, M. Self-adaptive check and repair operator-based particle swarm optimization for the multidimensional knapsack problem. Appl. Soft Comput. 2015, 26, 378–389. [Google Scholar] [CrossRef]
- Chih, M.; Lin, C.J.; Chern, M.S.; Ou, T.Y. Particle swarm optimization with time-varying acceleration coefficients for the multidimensional knapsack problem. Appl. Math. Model. 2014, 38, 1338–1350. [Google Scholar]
- Gopakumar, A.; Jacob, L. Localization in wireless sensor networks using particle swarm optimization. In Proceedings of the IET International Conference on Wireless, Mobile and Multimedia Networks, Mumbai, India, 11–12 January 2008; pp. 227–230.
- Singh, S.; Mittal, E. Range based wireless sensor node localization using PSO and BBO and its variants. In Proceedings of the IEEE International Conference on Communication Systems and Network Technologies (CSNT), Gwalior, India, 6–8 April 2013; pp. 309–315.
- Kim, D.H.; Abraham, A.; Cho, J.H. A hybrid genetic algorithm and bacterial foraging approach for global optimization. Inf. Sci. 2007, 177, 3918–3937. [Google Scholar] [CrossRef]
- Abd-Elazim, S.M.; Ali, E.S. A hybrid particle swarm optimization and bacterial foraging for optimal power system stabilizers design. Int. J. Electr. Power Energy Syst. 2013, 46, 334–341. [Google Scholar] [CrossRef]
- Das, S.; Suganthan, P.N. Differential evolution: A survey of the state-of-the-art. IEEE Trans. Evolut. Comput. 2011, 15, 4–31. [Google Scholar] [CrossRef]
- Chagas, S.H.; Martins, J.B.; de Oliveira, L.L. Genetic algorithms and simulated annealing optimization methods in wireless sensor networks localization using artificial neural networks. In Proceedings of the 55th IEEE International Midwest Symposium on Circuits and Systems (MWSCAS), Boise, ID, USA, 5–8 August 2012; pp. 928–931.
- Li, S.P.; Wang, X.H. The research on Wireless Sensor Network node positioning based on DV-hop algorithm and cuckoo searching algorithm. In Proceedings of the IEEE International Conference on Mechatronic Sciences, Electric Engineering and Computer (MEC), Shenyang, China, 20–22 December 2013; pp. 620–623.
- Goyal, S.; Patterh, M.S. Wireless sensor network localization based on cuckoo search algorithm. Wirel. Pers. Commun. 2014, 79, 223–234. [Google Scholar] [CrossRef]
- Yang, X.S.; Deb, S. Cuckoo search via Lévy flights. In Proceedings of the IEEE World Congress on Nature & Biologically Inspired Computing, Coimbatore, India, 9–11 December 2009; pp. 210–214.
- Yang, X.S. Nature-Inspired Metaheuristic Algorithms, 2nd ed.; Luniver Press: Somerset, UK, 2010. [Google Scholar]
- Walton, S.; Hassan, O.; Morgan, K.; Brown, M.R. Modified cuckoo search: a new gradient free optimisation algorithm. Chaos Solitons Fractals 2011, 44, 710–718. [Google Scholar] [CrossRef]
- Valian, E.; Tavakoli, S.; Mohanna, S.; Haghi, A. Improved cuckoo search for reliability optimization problems. Comput. Ind. Eng. 2013, 64, 459–468. [Google Scholar] [CrossRef]
- Namin, P.H.; Tinati, M.A. Node localization using particle swarm optimization. In Proceedings of the Seventh IEEE International Conference on Intelligent Sensors, Sensor Networks and Information Processing (ISSNIP), Melbourne, Australia, 6–9 December 2011; pp. 288–293.
- Li, Z.; Lei, L. Sensor node deployment in wireless sensor networks based on improved particle swarm optimization. In Proceedings of the IEEE International Conference on Applied Superconductivity and Electromagnetic Devices, Chengdu, China, 25–27 September 2009; pp. 215–217.


© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, J.; Xia, L. An Effective Cuckoo Search Algorithm for Node Localization in Wireless Sensor Network. Sensors 2016, 16, 1390. https://doi.org/10.3390/s16091390
Cheng J, Xia L. An Effective Cuckoo Search Algorithm for Node Localization in Wireless Sensor Network. Sensors. 2016; 16(9):1390. https://doi.org/10.3390/s16091390
Chicago/Turabian StyleCheng, Jing, and Linyuan Xia. 2016. "An Effective Cuckoo Search Algorithm for Node Localization in Wireless Sensor Network" Sensors 16, no. 9: 1390. https://doi.org/10.3390/s16091390
APA StyleCheng, J., & Xia, L. (2016). An Effective Cuckoo Search Algorithm for Node Localization in Wireless Sensor Network. Sensors, 16(9), 1390. https://doi.org/10.3390/s16091390