
Influence and Correction from the Human Body on the Measurement of a Power-Frequency Electric Field Sensor

Abstract
:1. Introduction
2. Equivalent Circuit Analysis of the Influence of the Human Body on Electric Field Measurement
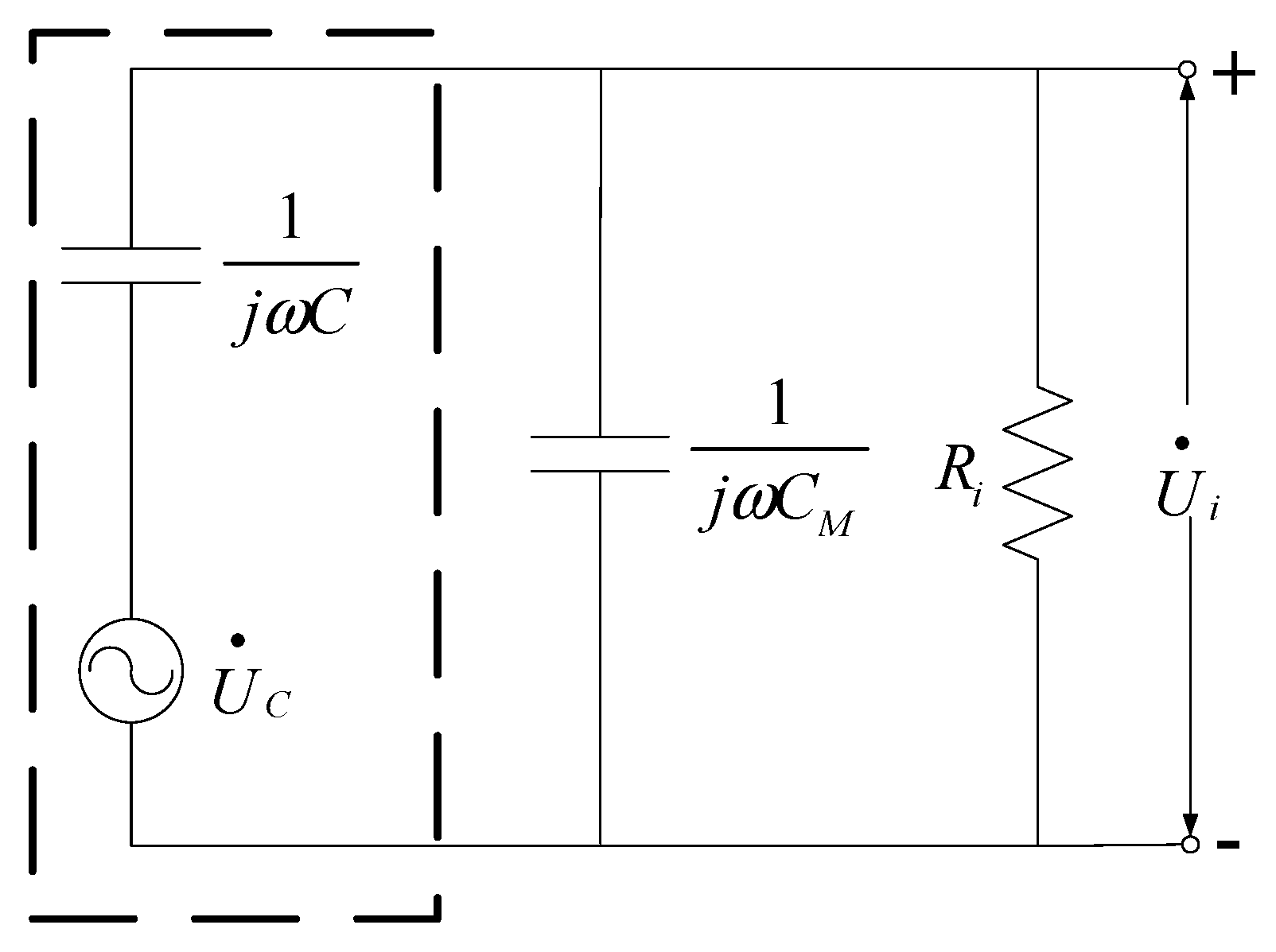
2.1. In the Absence of a Human Body
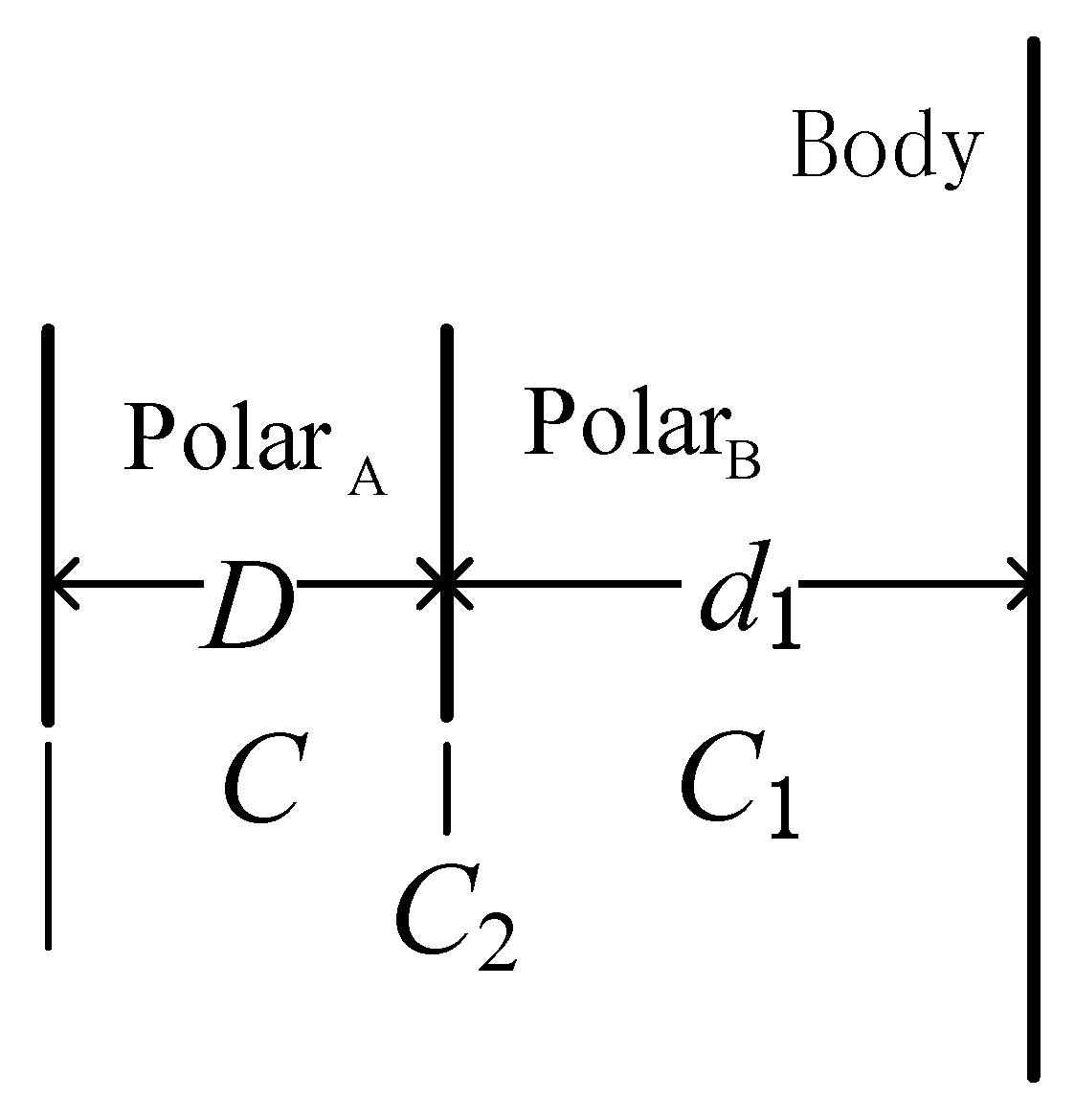
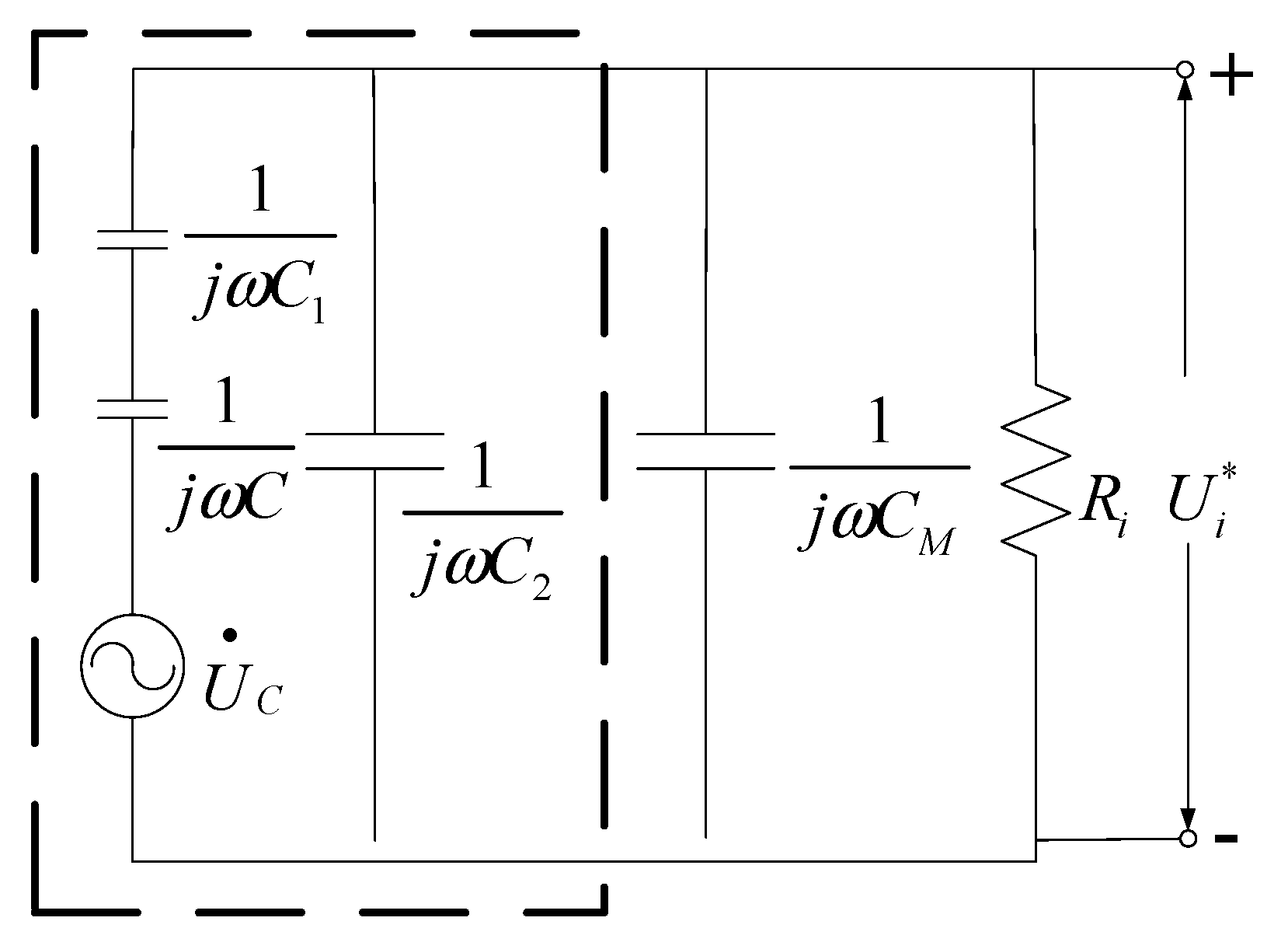
2.2. In the Case of an Approaching Human Body
3. Simulation Analysis
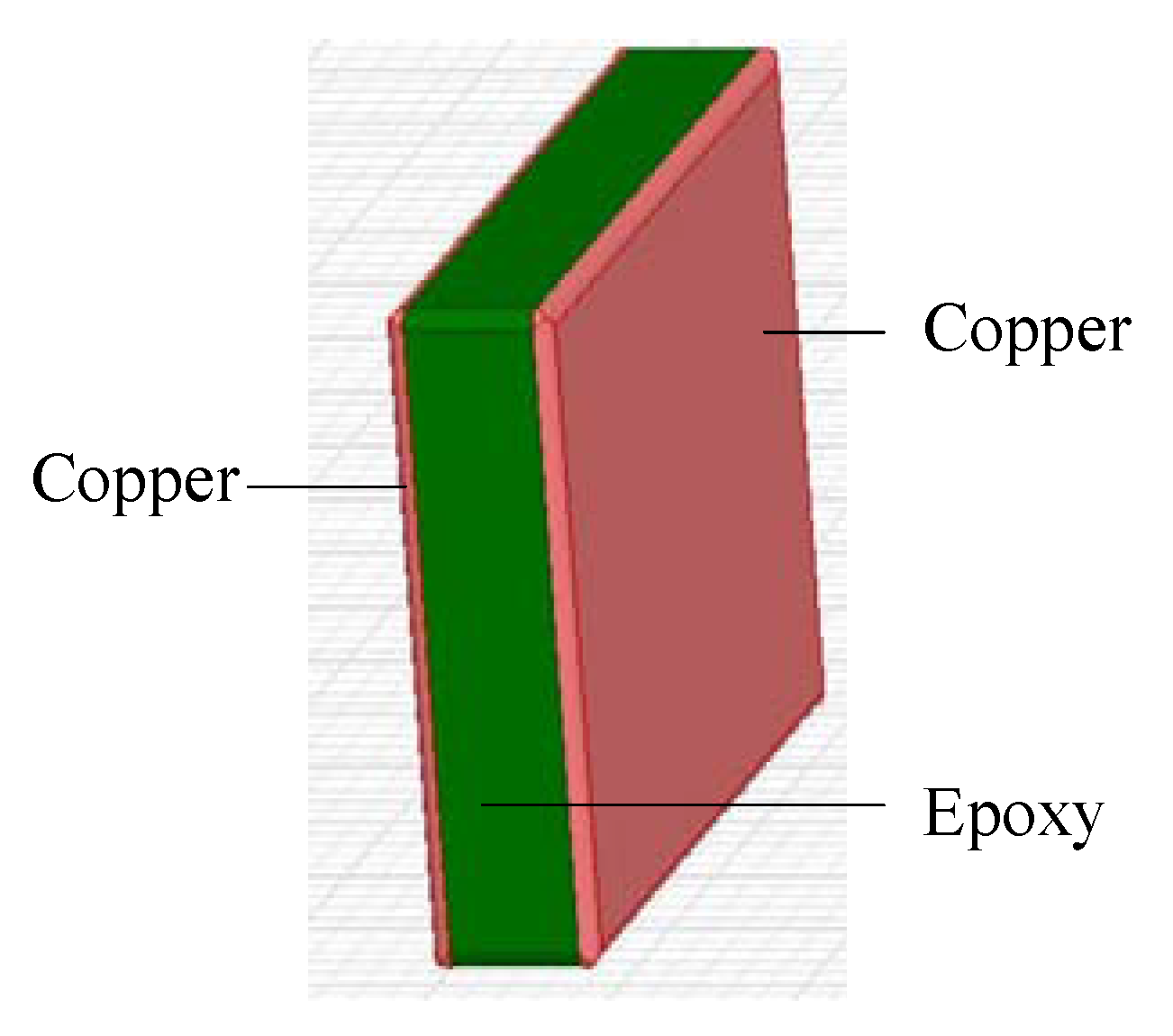
3.1. Simulation Model Setting
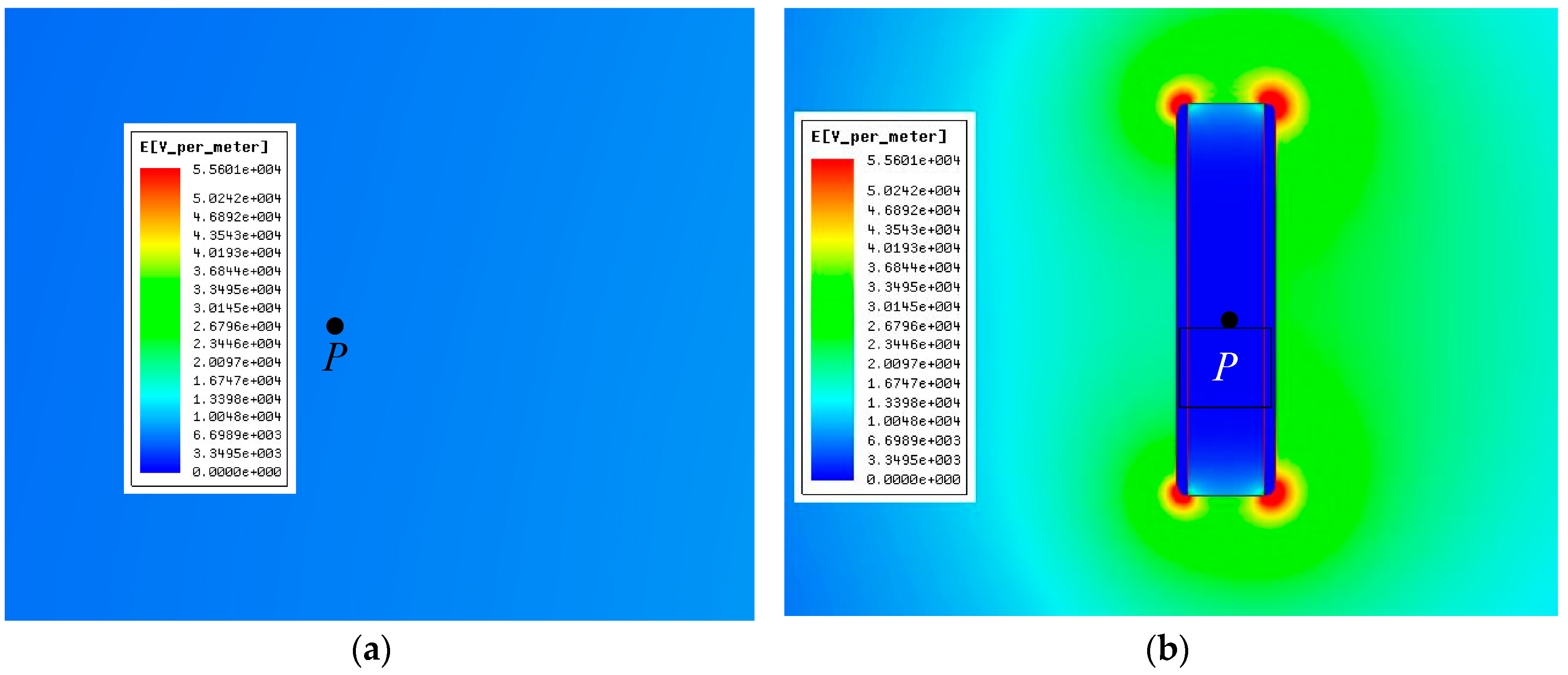
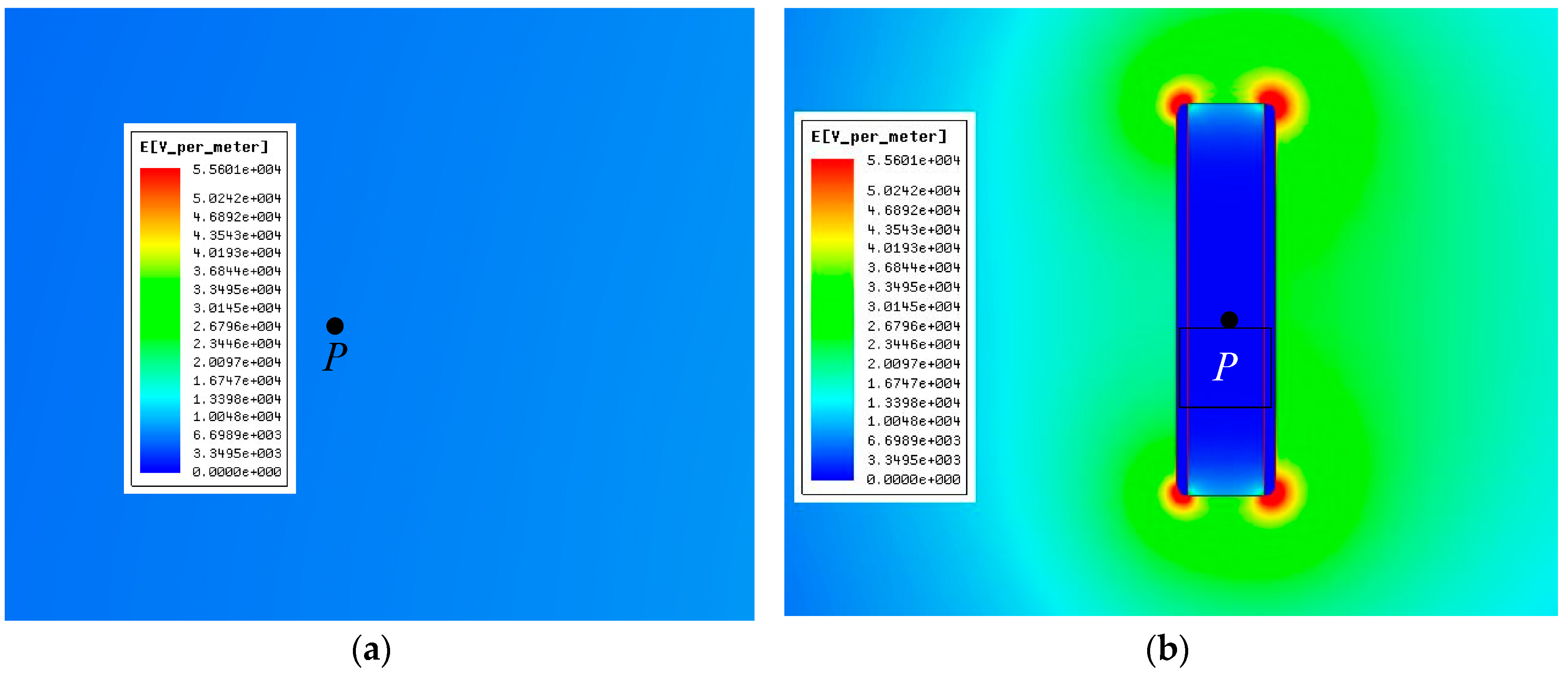
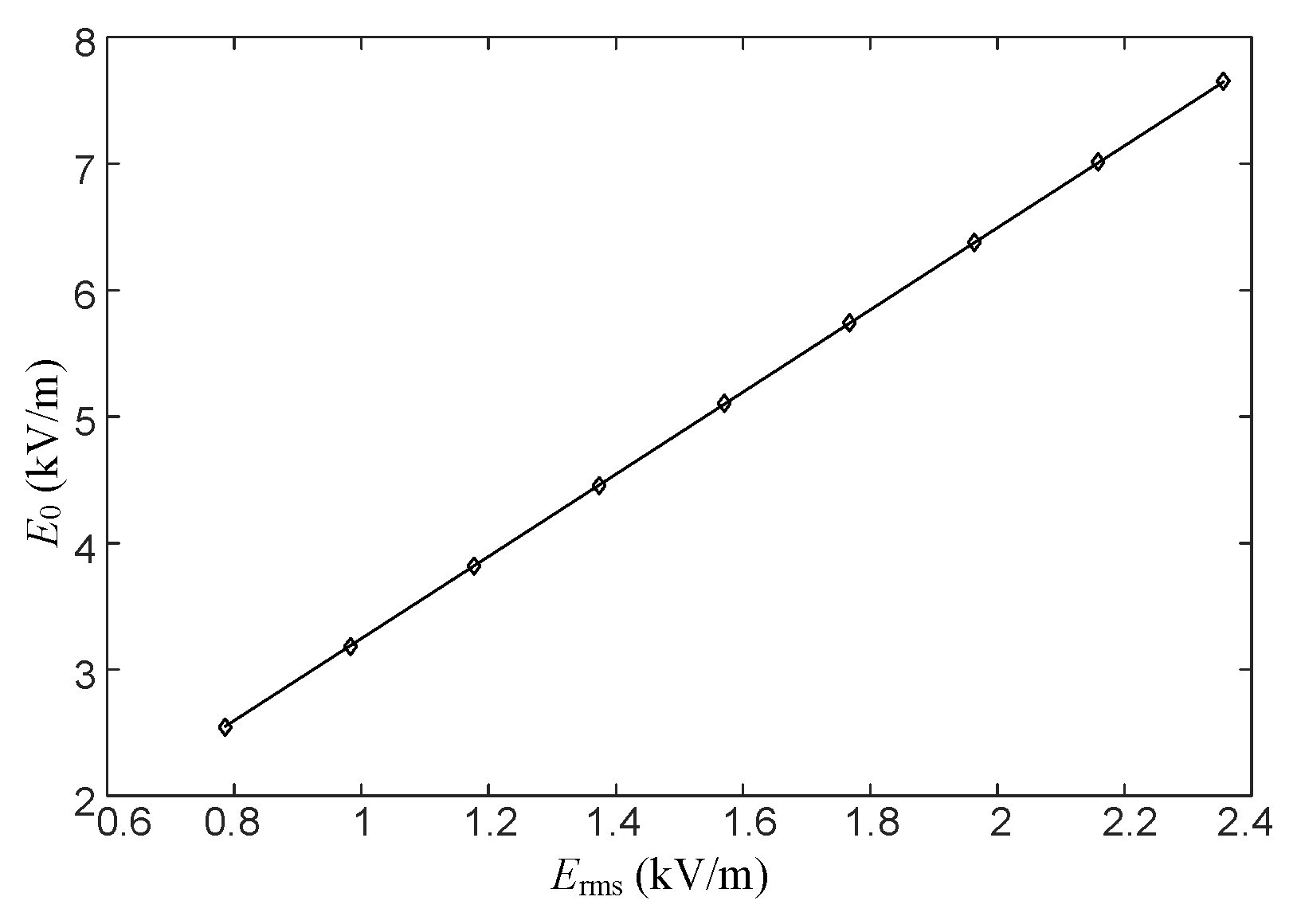
3.2. Simulation Results and Analysis in the Absence of a Human Body
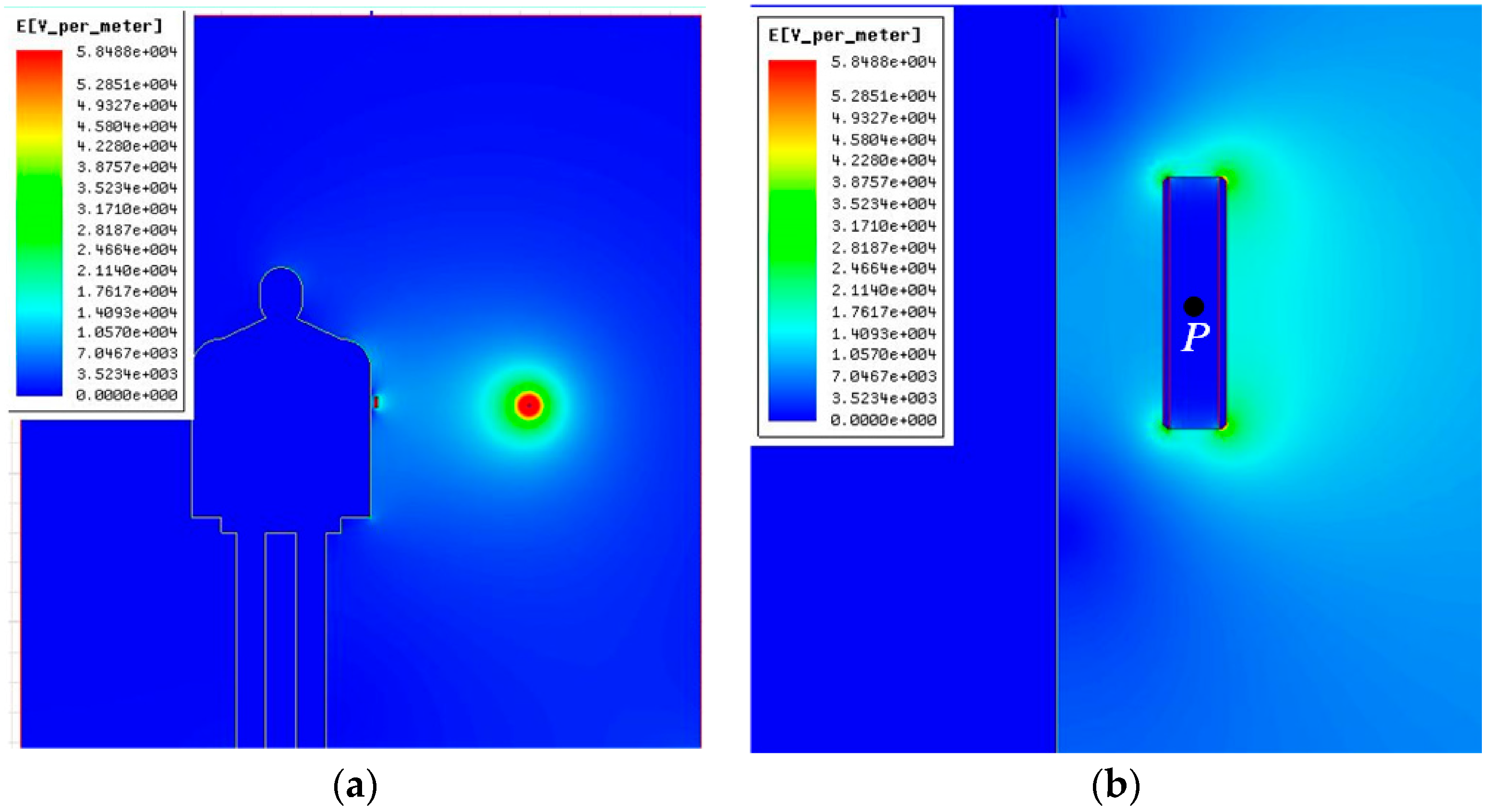
3.3. Simulation Result and Analysis in the Case of an Approaching Human Body
4. Experimental Verification
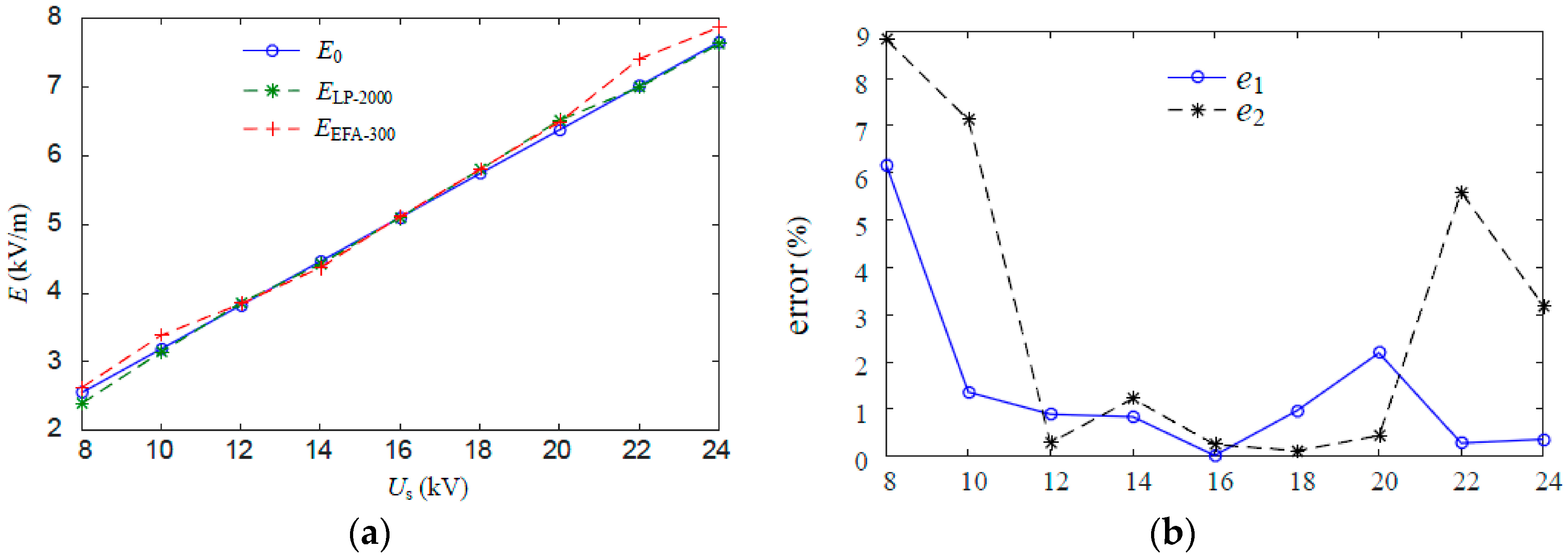
4.1. Experimental Result and Analysis in the Absence of a Human Body
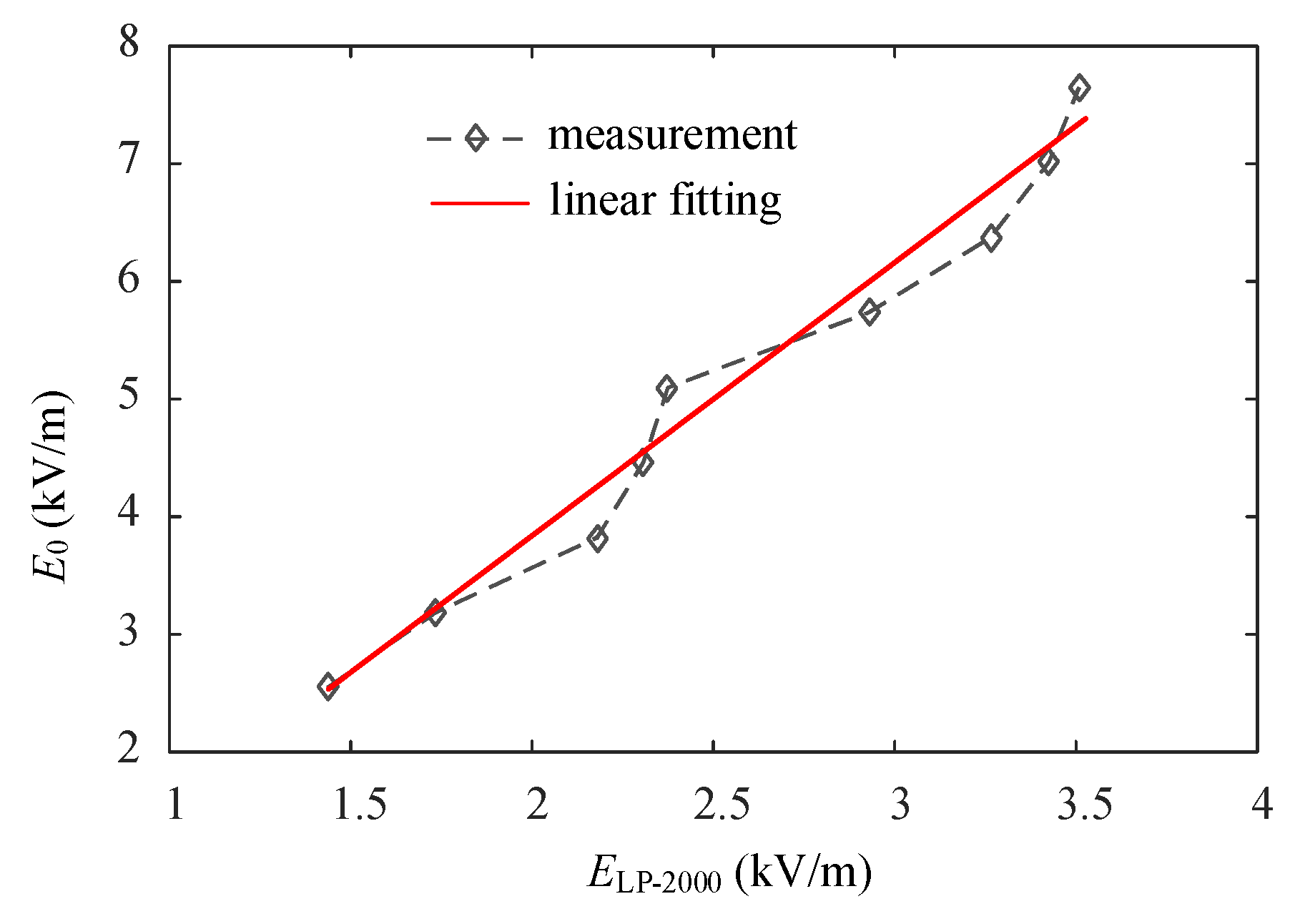
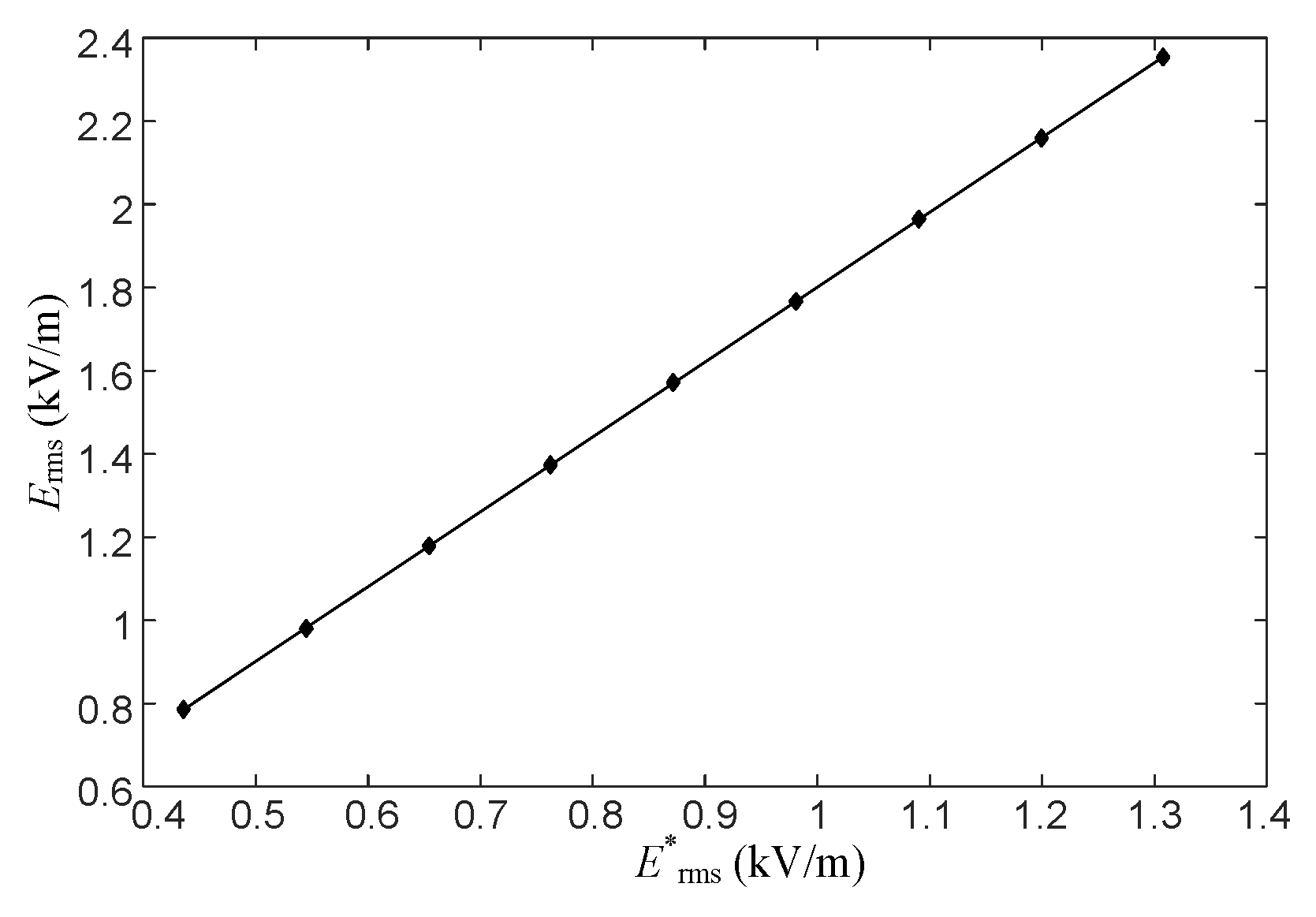
4.2. Experimental Results and Analysis in the Case of an Approaching Human Body
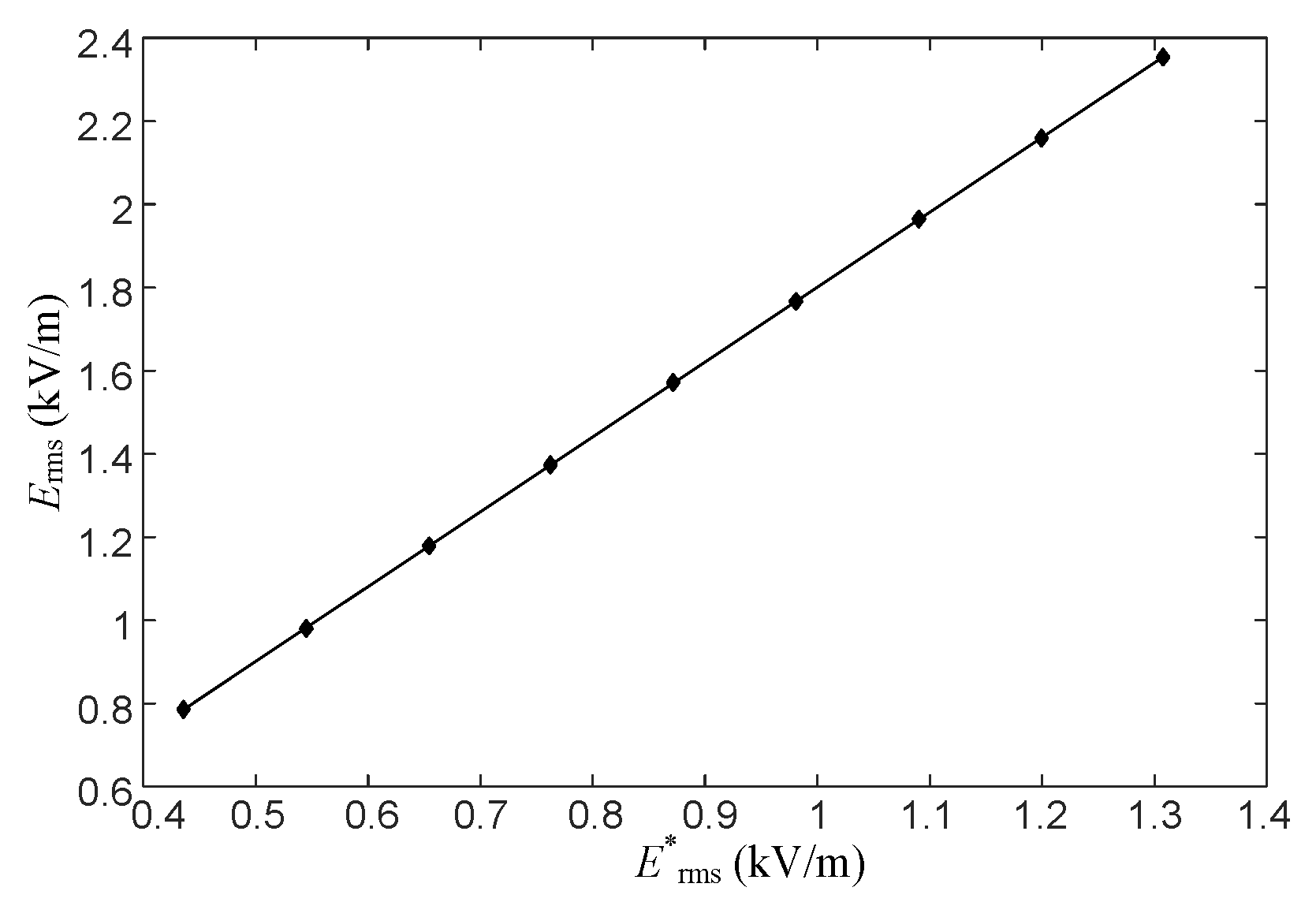
4.2.1. Regulating the Excitation Voltages of Electric Field
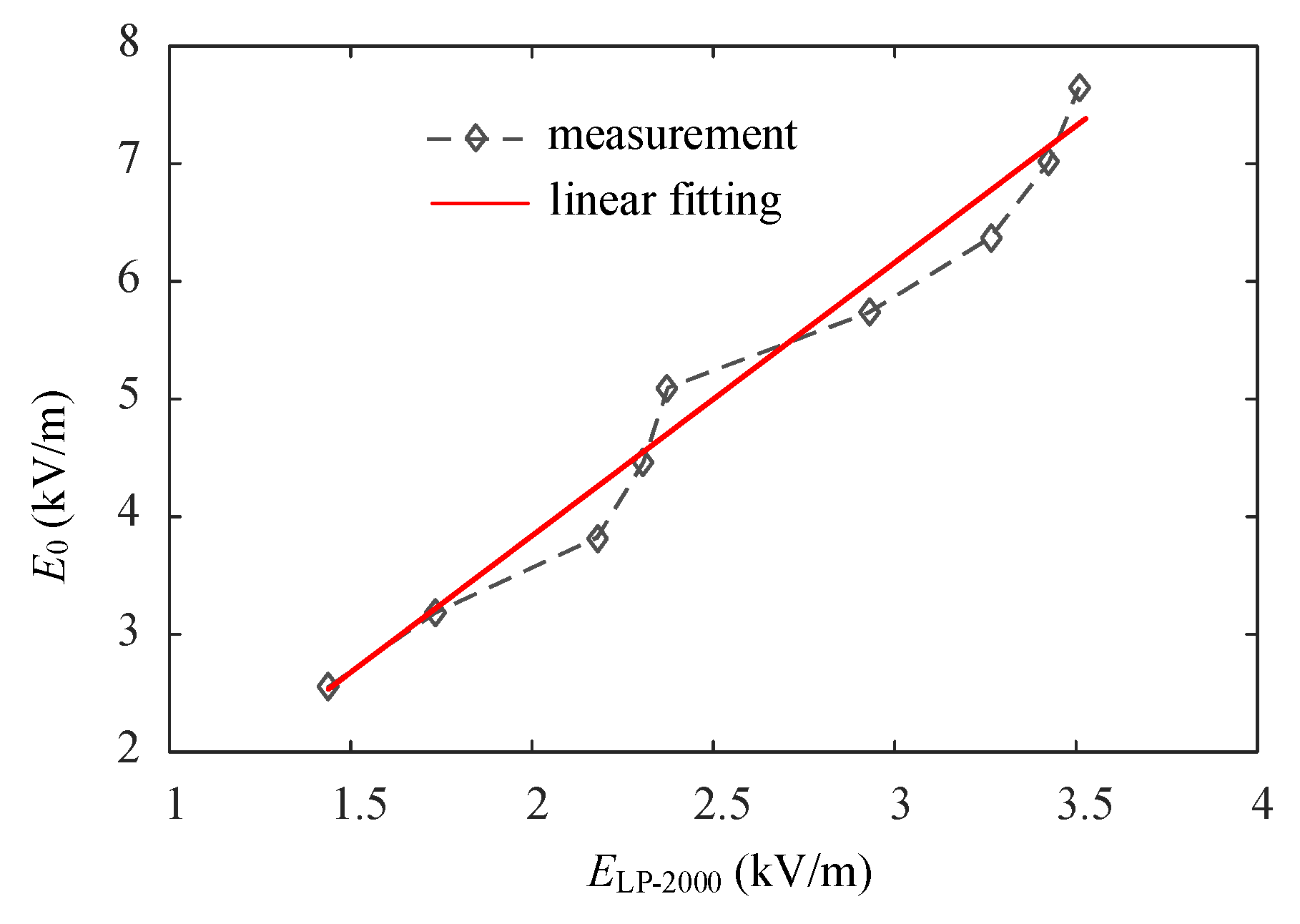
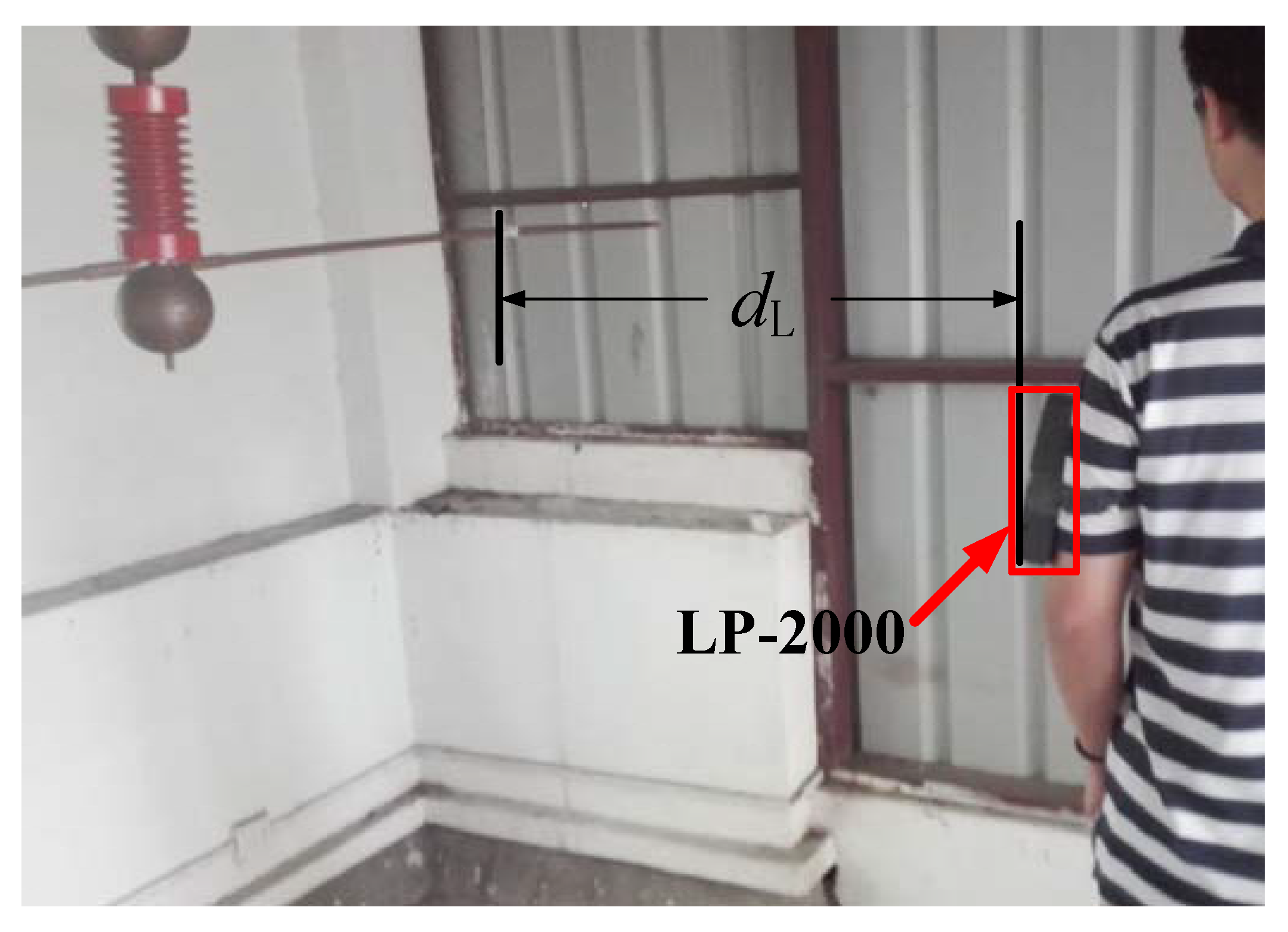
4.2.2. Regulating the Distances between the Measuring Point and the Conductor
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Ztoupis, I.N.; Gonos, I.F.; Stathopulos, I.A. Measurement and calculation of power frequency electric fields generated by high voltage overhead power lines. In Proceedings of the 2014 International Conference on High Voltage Engineering and Application (ICHVE), Poznan, Poland, 8–11 September 2014; pp. 1–4.
- Ziegel, B.G.; Repacholi, M.; Mckinlay, A. International commission on non-ionizing radiation protection. Prog. Biophys. Mol. Biol. 2007, 92, 1–3. [Google Scholar]
- General. In American Conference of Governmental Industrial Hygienists; Applied Industrial Hygiene: Cininnati, OH, USA, 1987.
- IEEE. Standard for Safety Levels with Respect to Human Exposure to Electromagnetic Fields, 0–3 kHz; IEEE C95.6: New York, NY, USA, 2002. [Google Scholar]
- Decat, G.; Deckx, L.; Meynen, G. Magnetic Fields of Induction Heaters in the Framework of Directive 2004/40/EC of the European Parliament and of the Council. Int. J. Occup. Saf. Ergon. Jose 2006, 12, 169–176. [Google Scholar] [CrossRef] [PubMed]
- Hui, J.; Guan, Z.; Liu, Y. Values and Rationales of Limits of Power Frequency Electric and Magnetic Fields in Various Countries. High Volt. Eng. 2006, 32, 51–54. [Google Scholar]
- Beriain, A.; Gutierrez, I.; Solar, H.; Berenguer, R. 0.5 v and 0.43 pj/bit capacitive sensor interface for passive wireless sensor systems. Sensors 2015, 15, 21554–21566. [Google Scholar] [CrossRef] [PubMed]
- Ze-Wen, H.U.; Wei, H.E.; Yao, D.G.; Wang, J.G.; Wen, J.; Luo, L.I. Research of high-voltage power frequency electric field warning instrument. Electr. Meas. Instrum. 2009, 9, 45–48. [Google Scholar]
- Kletzing, C.A.; Kurth, W.S.; Acuna, M.; Macdowall, R.J.; Torbert, R.B.; Averkamp, T. The electric and magnetic field instrument suite and integrated science (emfisis) on rbsp. Space Sci. Rev. 2013, 179, 127–181. [Google Scholar] [CrossRef]
- Van, R.E.; Croft, R.; Juutilainen, J.; Lagroye, I.; Miyakoshi, J.; Saunders, R. Effects of radiofrequency electromagnetic fields on the human nervous system. J. Toxicol. Environ. Health B Crit. Rev. 2009, 12, 572–597. [Google Scholar]
- Rong, Z.; Bo, W.; Ben, N.; Zhanqing, Y. Development and application of integrated optical sensors for intense e-field measurement. Sensors 2012, 12, 11406–11434. [Google Scholar]
- Vaillancourt, G.H.; Carignan, S.; Jean, C. Experience with the detection of faulty composite insulators on high-voltage power lines by the electric field measurement method. IEEE Trans. Power Deliv. 1998, 13, 661–666. [Google Scholar] [CrossRef]
- Lin, Y.Y.; Zhao, Y.Y.; Li, P.L.; Lin, Y.Y.; Zhao, Y.Y.; Li, P.L. Study on measurement errors of the ball type sensor in the power frequency electric field. Adv. Mater. Res. 2014, 1022, 415–418. [Google Scholar] [CrossRef]
- Zhou, Q.; He, W.; Li, S.; Hou, X. Research and experiments on a unipolar capacitive voltage sensor. Sensors 2015, 15, 20678–20697. [Google Scholar] [CrossRef] [PubMed]
- Xia, X.; Yan, X.; Zexing, D. Thermodynamic modeling and analysis of an optical electric-field sensor. Sensors 2015, 15, 7125–7135. [Google Scholar] [CrossRef] [PubMed]
- Meng-Ting, Y.U.; Wang, J.G.; Jian, L.I. The experimental study on the human body influence on measurement of high voltage power frequency electric field. Electr. Meas. Instrum. 2013, 6, 24–28. [Google Scholar]
- Abdel-Salam, M.; Mohamed, A.H. Transmission-line electric field induction in humans using charge simulation method. IEEE Trans. Biomed. Eng. 1995, 42, 1105–1109. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Zou, J.; Zhang, B.; Yuan, J.; Zhen, W.U.; Guangming, Y.E. Analysis of influence of 50 Hz electric fields generated by the high voltage power lines on human body. High Volt. Eng. 2004, 30, 35–37. [Google Scholar]
- Abd-Allah, M.A. Magnetic field-induced currents in human body in the proximity of power lines. In Proceedings of the IEEE Power Engineering Society General Meeting, Toronto, ON, Canada, 13–17 July 2003.
- Chiba, A.; Isaka, K.; Yokoi, Y. Application of finite element method to analysis of induced current densities inside human model exposed to 60 Hz electric field. IEEE Trans. Power Appar. Syst. 1984, 103, 1895–2102. [Google Scholar] [CrossRef]
- Safigianni, A.S.; Tsompanidou, C.G. Electric- and Magnetic-Field Measurements in an Outdoor Electric Power Substation. IEEE Trans. Power Deliv. 2009, 24, 38–42. [Google Scholar] [CrossRef]
- Yuanzhe, X.; Cheng, G.; Yanxin, L.; Yunfen, C.; Bihua, Z. Calculation and Experimental Validation of 3-D Parallel Plate Sensor for Transient Electric Field Measurement. In Proceedings of the 2007 International Symposium on Microwave, Antenna, Propagation and EMC Technologies for Wireless Communications, Hangzhou, China, 16–17 August 2007; pp. 1267–1271.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Publish Time | Frequency (Hz) | E (kV/m) | |
|---|---|---|---|---|
| Occupational Exposure | Public Exposure | |||
| ICNIRP 1 | 2010 | 50 | 10 | 5 |
| 60 | 8.3 | 4.2 | ||
| IEEE 2 | 2002 | 50 | 20 | 5 |
| NRPB 3 | 2004 | 50 | 10 | 5 |
| 60 | 8.3 | 4.2 | ||
| EU 4 | 2004 | 50 | 10 | — |
| 60 | 8.3 | |||
| 1999 | 50 | — | 5 | |
| 60 | 4.2 | |||
| Us (kV) | 8 | 10 | 12 | 14 | 16 | 18 | 20 | 22 | 24 |
|---|---|---|---|---|---|---|---|---|---|
| E0 (kV/m) | 2.5491 | 3.1865 | 3.8237 | 4.4610 | 5.0984 | 5.7357 | 6.3732 | 7.0103 | 7.6476 |
| Erms (kV/m) | 0.7852 | 0.9816 | 1.1779 | 1.3742 | 1.5705 | 1.7668 | 1.9631 | 2.1594 | 2.3557 |
| Us (kV) | 8 | 10 | 12 | 14 | 16 | 18 | 20 | 22 | 24 |
|---|---|---|---|---|---|---|---|---|---|
| Erms (kV/m) | 0.7852 | 0.9816 | 1.1779 | 1.3742 | 1.5705 | 1.7668 | 1.9631 | 2.1594 | 2.3557 |
| E*rms (kV/m) | 0.4360 | 0.5450 | 0.6540 | 0.7630 | 0.8720 | 0.9810 | 1.0900 | 1.1990 | 1.3081 |
| Name | Technical Characteristics |
|---|---|
| voltage regulator | input: 220 V with power frequency adjustable range: 0–250 V rated capacity: 10 kVA |
| transformer | rated capacity: 10 kVA ratio: 200 |
| EFA-300 | measurable frequency range: 5 Hz–32 kHz measurable electric field range: 0.1 V/m–200 kV/m |
| LP-2000 | measurable frequency range: 5 Hz–1 kHz measurable electric field range: 20 V/m–200 kV/m |
| Us (kV) | 8 | 10 | 12 | 14 | 16 | 18 | 20 | 22 | 24 |
|---|---|---|---|---|---|---|---|---|---|
| E0 (kV/m) | 2.5491 | 3.1865 | 3.8237 | 4.4610 | 5.0984 | 5.7357 | 6.3732 | 7.0103 | 7.6476 |
| ELP-2000 (kV/m) | 2.3921 | 3.1431 | 3.8580 | 4.4237 | 5.0997 | 5.7912 | 6.5125 | 6.9905 | 7.6198 |
| EEFA-300 (kV/m) | 2.6234 | 3.3840 | 3.8467 | 4.3699 | 5.1124 | 5.7983 | 6.4842 | 7.4047 | 7.8630 |
| e1 (%) | 6.16 | 1.36 | 0.89 | 0.84 | 0.02 | 0.97 | 2.19 | 0.28 | 0.36 |
| e2 (%) | 8.82 | 7.12 | 0.29 | 1.22 | 0.25 | 0.12 | 0.44 | 5.59 | 3.19 |
| Us (kV) | 8 | 10 | 12 | 14 | 16 | 18 | 20 | 22 | 24 |
|---|---|---|---|---|---|---|---|---|---|
| E0 (kV/m) | 2.5491 | 3.1865 | 3.8237 | 4.4610 | 5.0984 | 5.7357 | 6.3732 | 7.0103 | 7.6476 |
| ELP-2000 (kV/m) | 1.4361 | 1.7331 | 2.1793 | 2.3066 | 2.3745 | 2.9281 | 3.2647 | 3.4245 | 3.5080 |
| Us (kV) | 8 | 10 | 12 | 14 | 16 | 18 | 20 | 22 | 24 |
|---|---|---|---|---|---|---|---|---|---|
| E0 (kV/m) | 2.5491 | 3.1865 | 3.8237 | 4.4610 | 5.0984 | 5.7357 | 6.3732 | 7.0103 | 7.6476 |
| E*LP-2000 (kV/m) | 2.4452 | 3.3538 | 3.7979 | 4.3544 | 4.8430 | 5.8499 | 6.3979 | 6.8109 | 7.2634 |
| error (%) | 4.08 | 5.25 | 0.67 | 2.39 | 5.01 | 1.99 | 0.34 | 2.84 | 5.02 |
| dL (cm) | 53 | 63 | 73 | 83 | 93 | 103 |
|---|---|---|---|---|---|---|
| E0 (kV) | 3.8237 | 3.2423 | 2.7417 | 2.372 | 2.0744 | 1.8264 |
| E*LP-2000 (kV) | 3.8582 | 3.3455 | 2.7956 | 2.3144 | 1.9733 | 1.7836 |
| error (%) | 0.8970 | 3.1675 | 1.9441 | 2.4452 | 4.8882 | 2.3763 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiao, D.; Liu, H.; Zhou, Q.; Xie, Y.; Ma, Q. Influence and Correction from the Human Body on the Measurement of a Power-Frequency Electric Field Sensor. Sensors 2016, 16, 859. https://doi.org/10.3390/s16060859
Xiao D, Liu H, Zhou Q, Xie Y, Ma Q. Influence and Correction from the Human Body on the Measurement of a Power-Frequency Electric Field Sensor. Sensors. 2016; 16(6):859. https://doi.org/10.3390/s16060859
Chicago/Turabian StyleXiao, Dongping, Huaitong Liu, Qiang Zhou, Yutong Xie, and Qichao Ma. 2016. "Influence and Correction from the Human Body on the Measurement of a Power-Frequency Electric Field Sensor" Sensors 16, no. 6: 859. https://doi.org/10.3390/s16060859