
A Real-Time Interference Monitoring Technique for GNSS Based on a Twin Support Vector Machine Method


Abstract
:1. Introduction
1.1. Hypothesis Testing Method for Interference Monitoring
1.2. Interference Monitoring Method Based on Characteristic Parameter Threshold
1.3. Integrated Navigation Method for Interference Monitoring
1.4. Smart Antenna Technology for Interference Monitoring
2. Support Vector Machine
3. Twin Support Vector Machine
3.1. The Model of TWSVM
3.2. The Solution of TWSVM
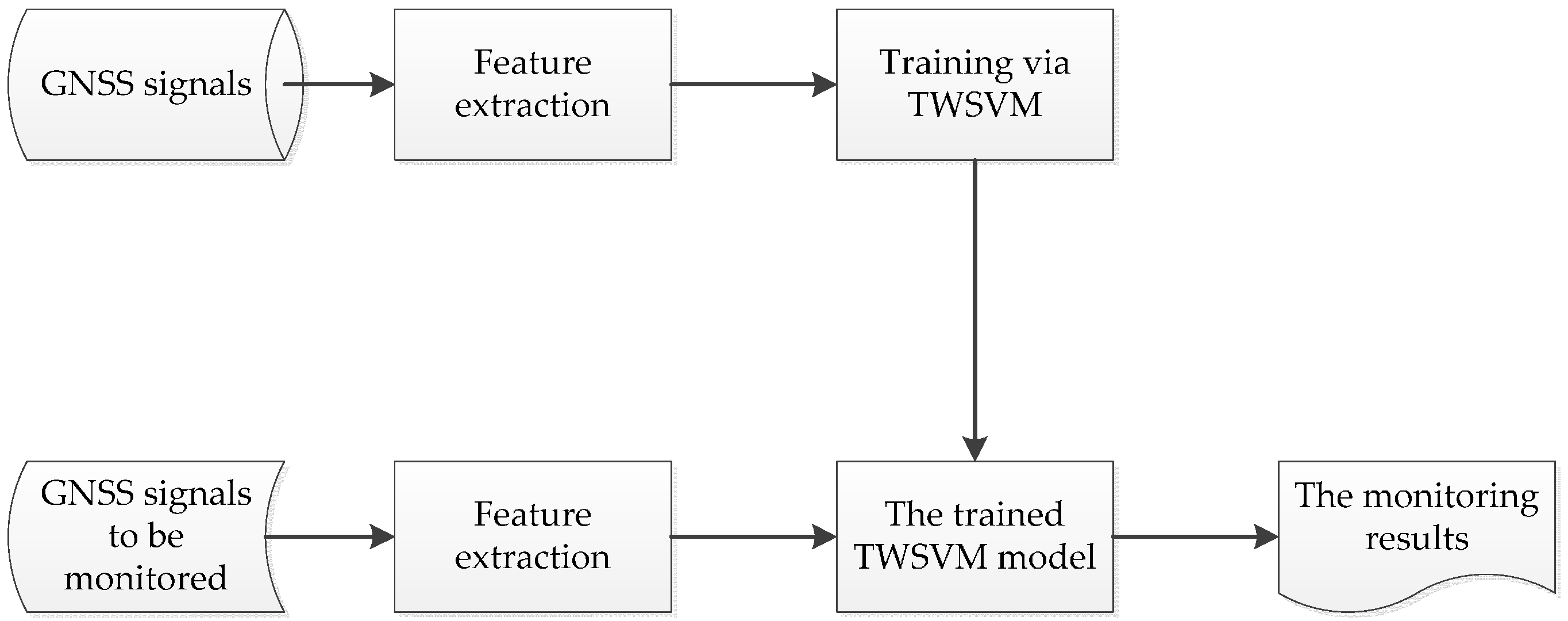
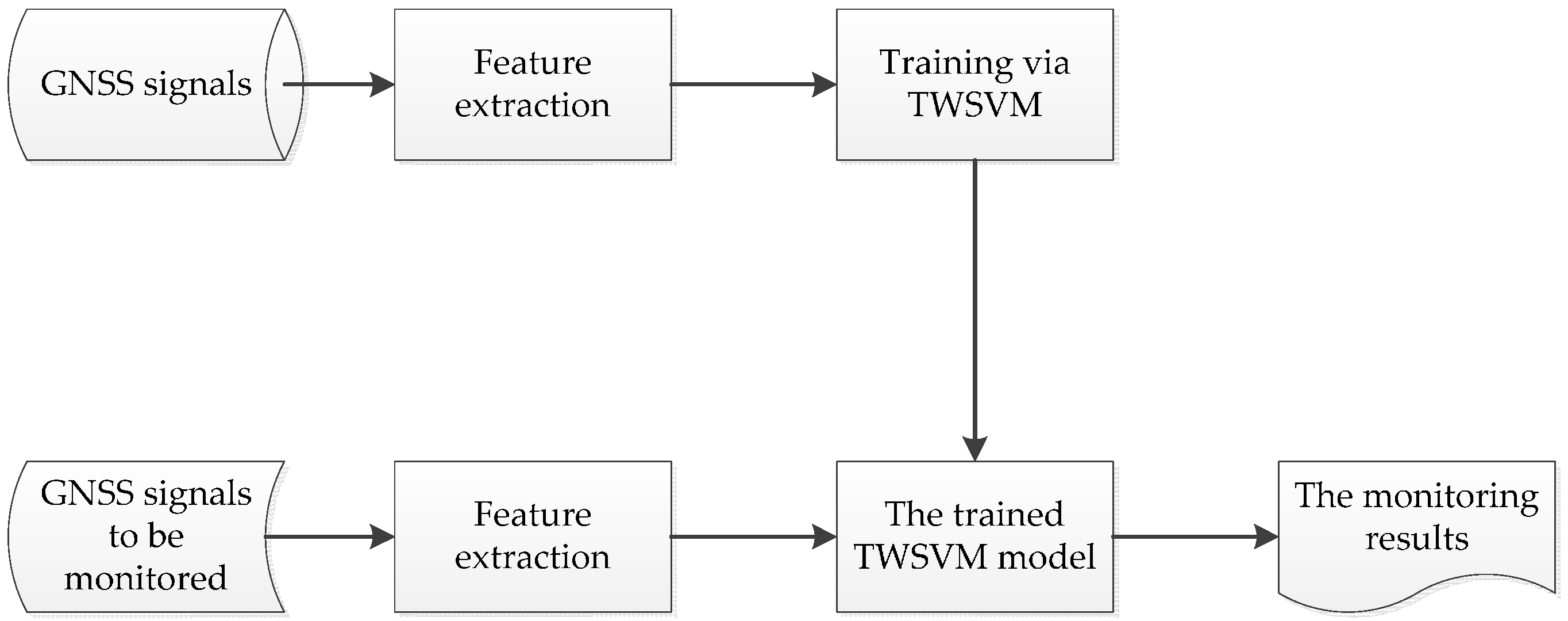
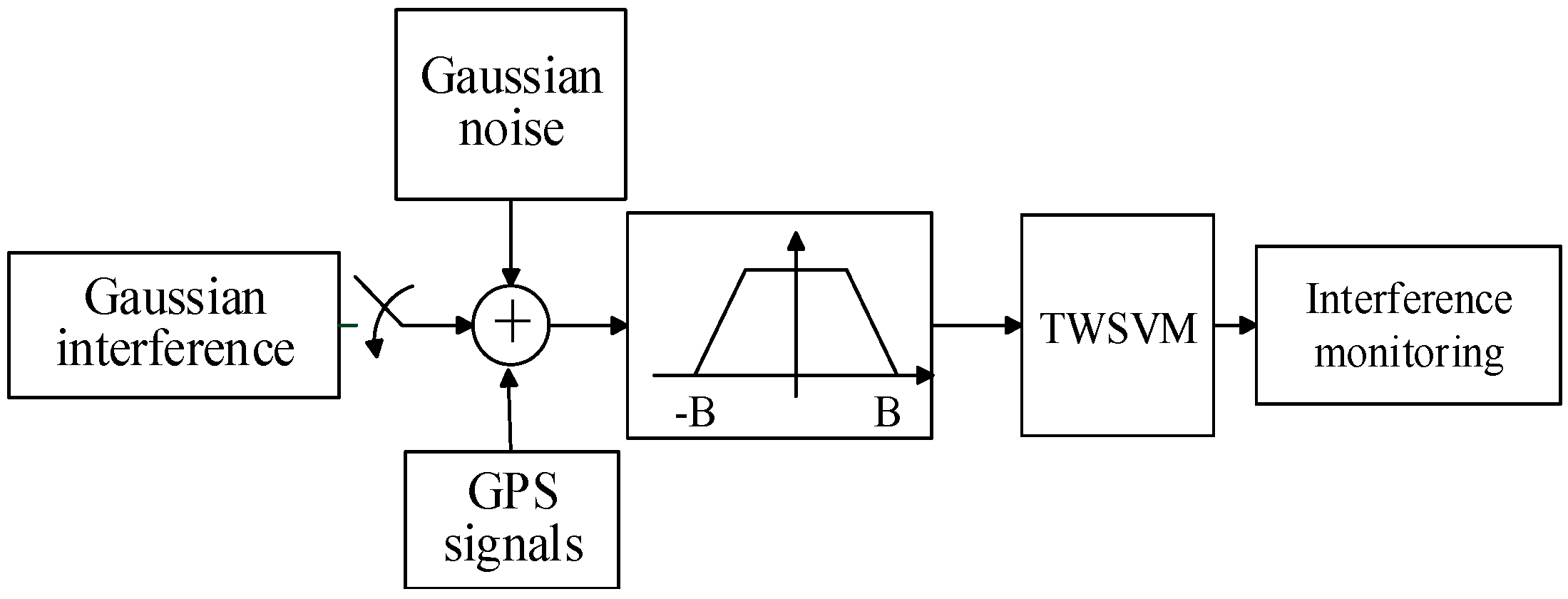
4. Interference Monitoring
4.1. Power Spectral Density
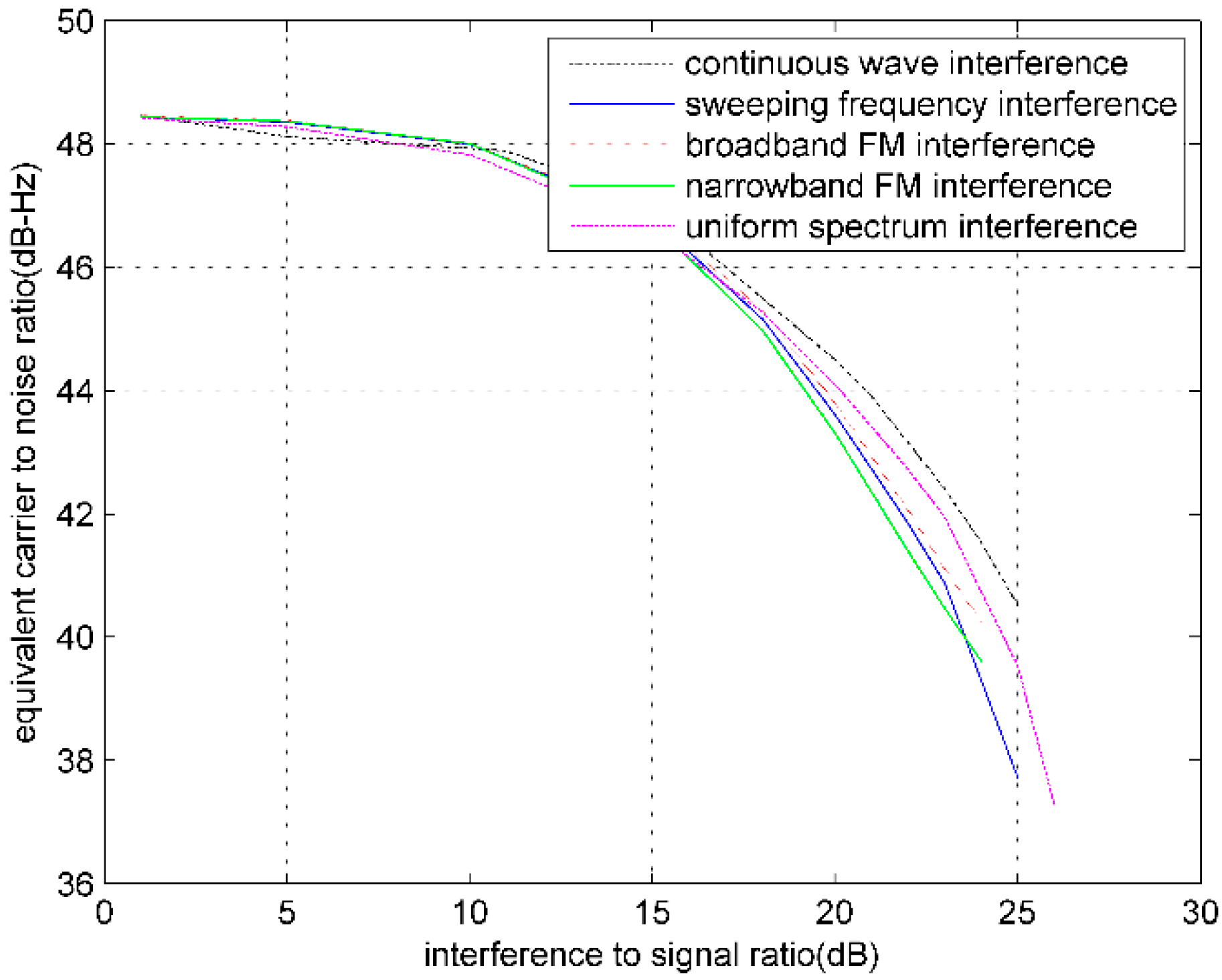
4.2. Carrier to Noise Ratio
4.3. Correlator Output
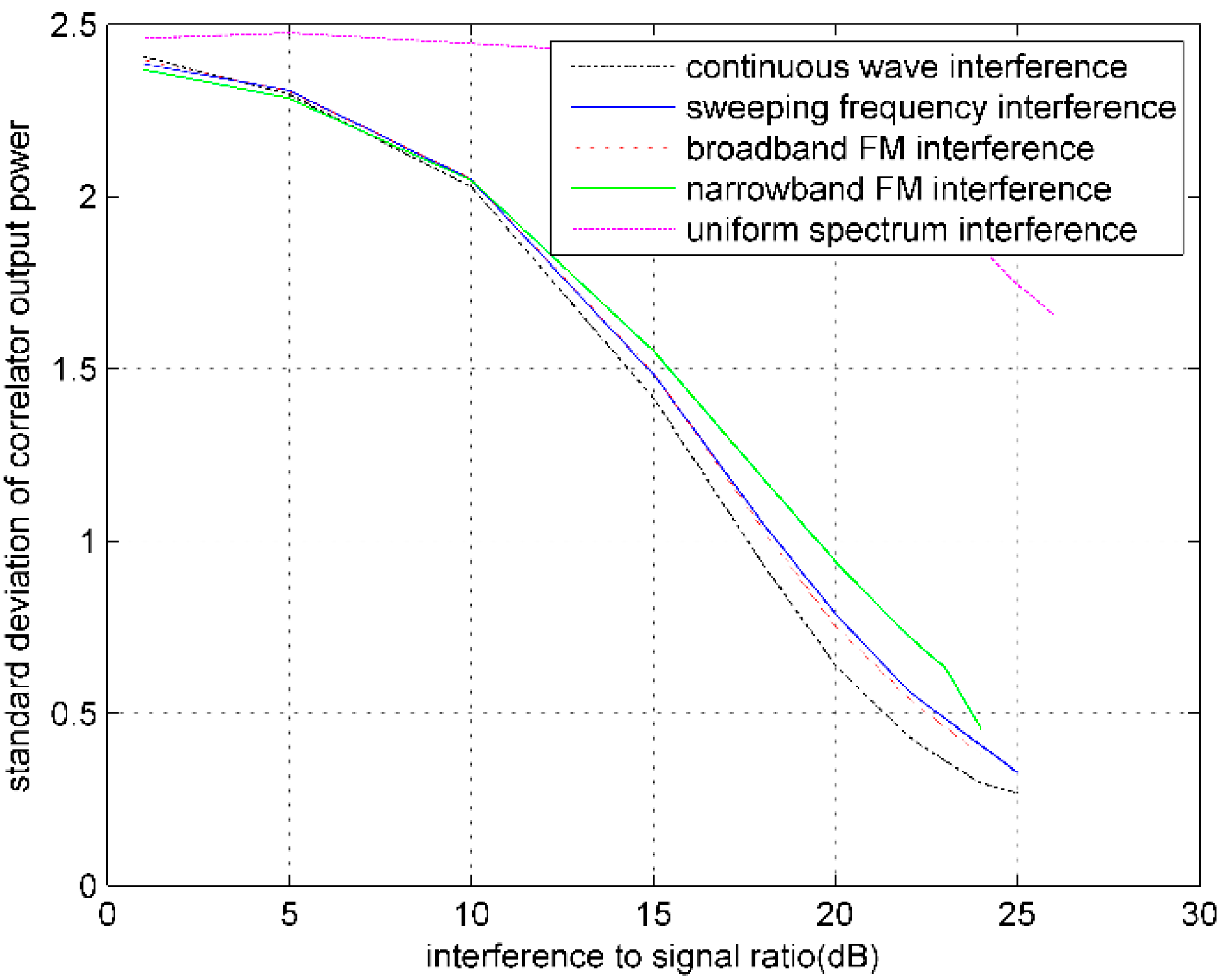
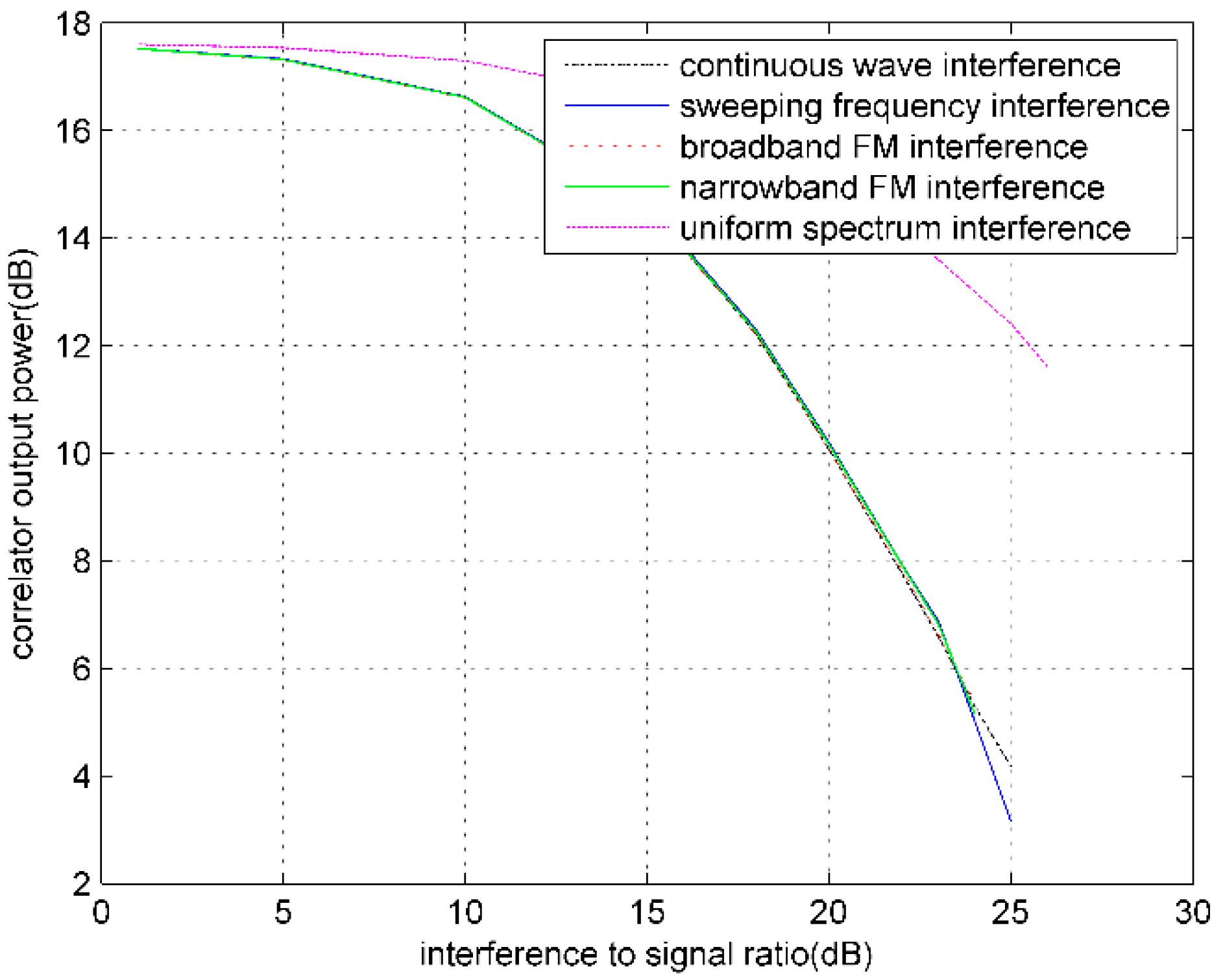
4.3.1. Correlator Output Power
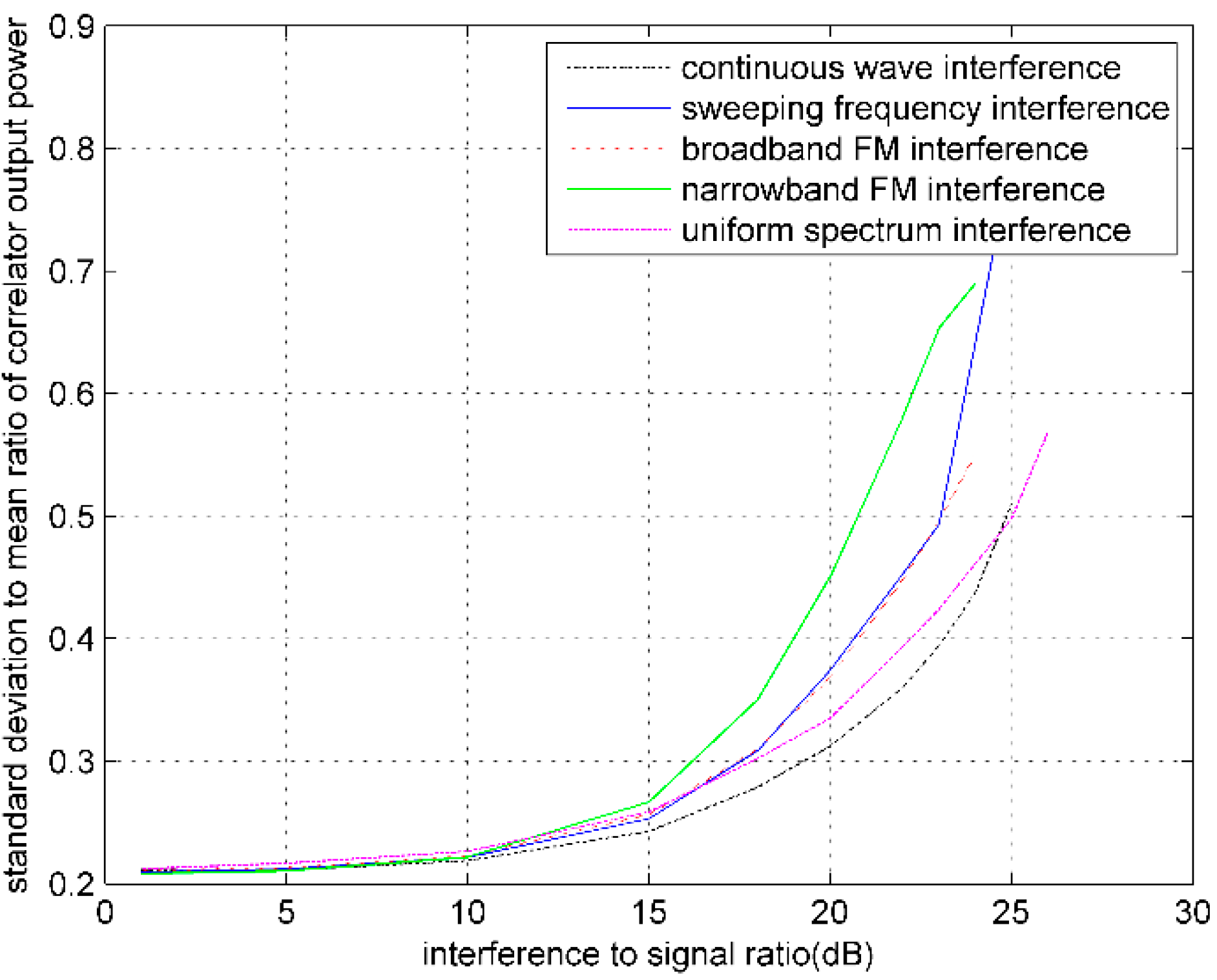
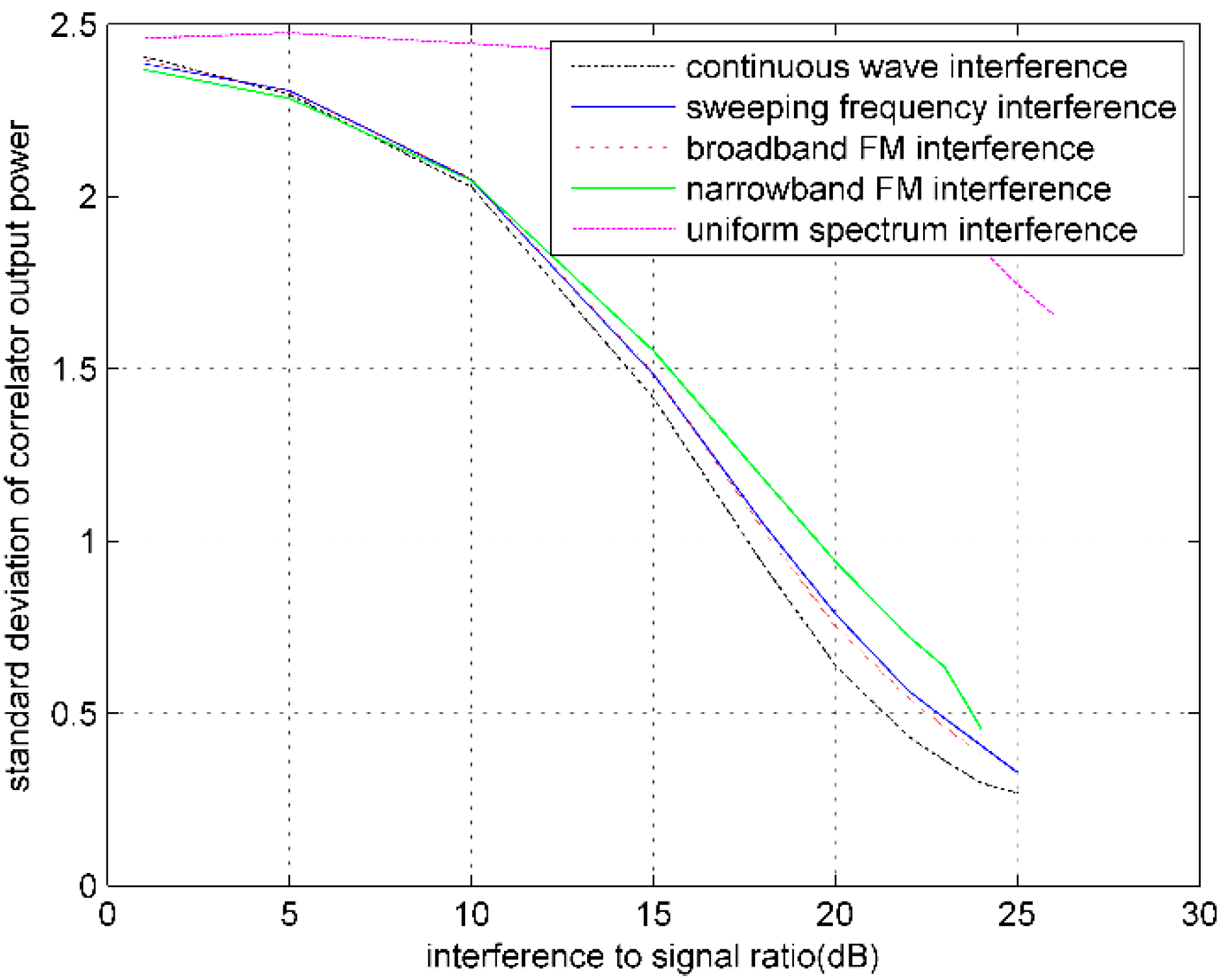
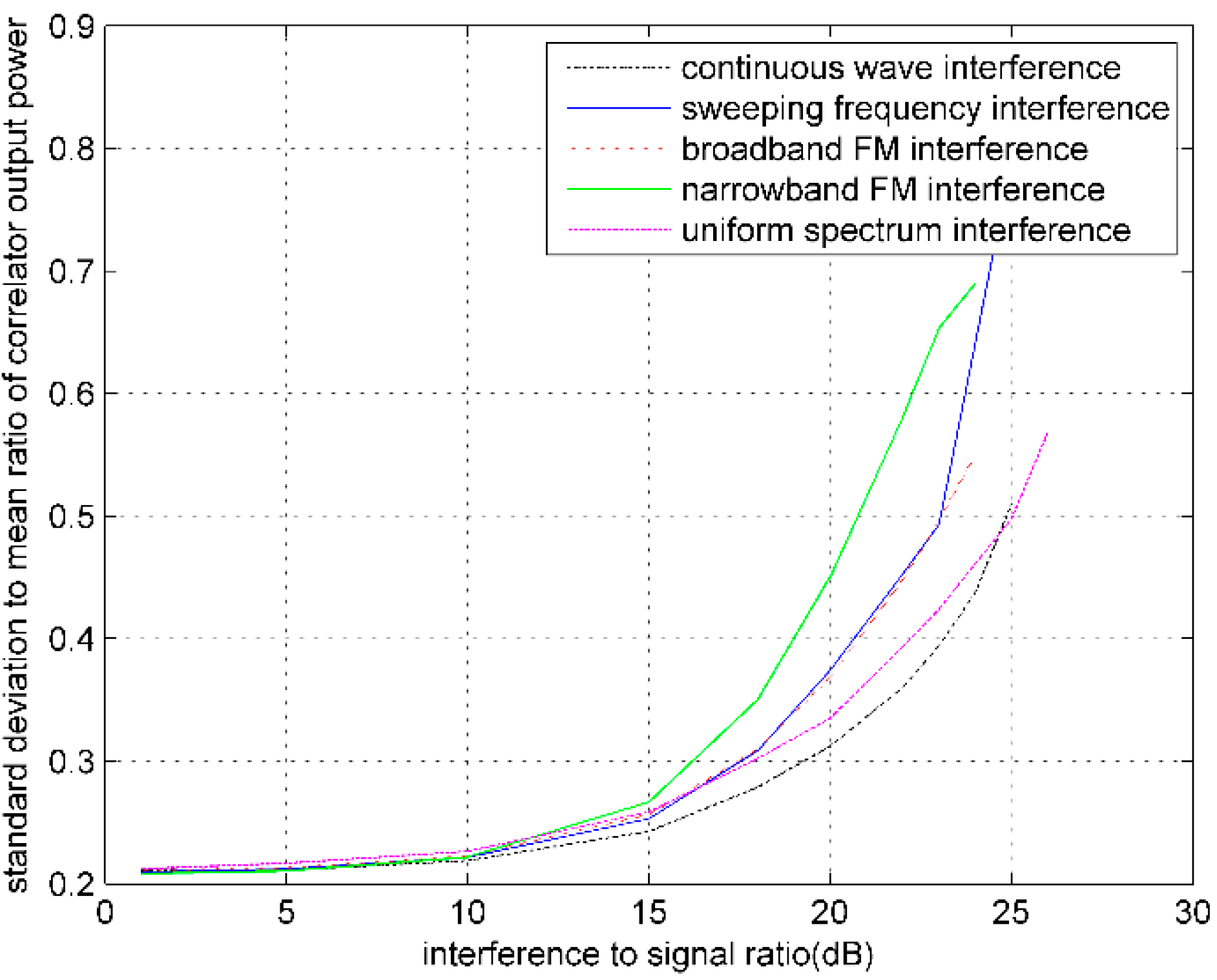
4.3.2. Correlator Output Power Standard Deviation
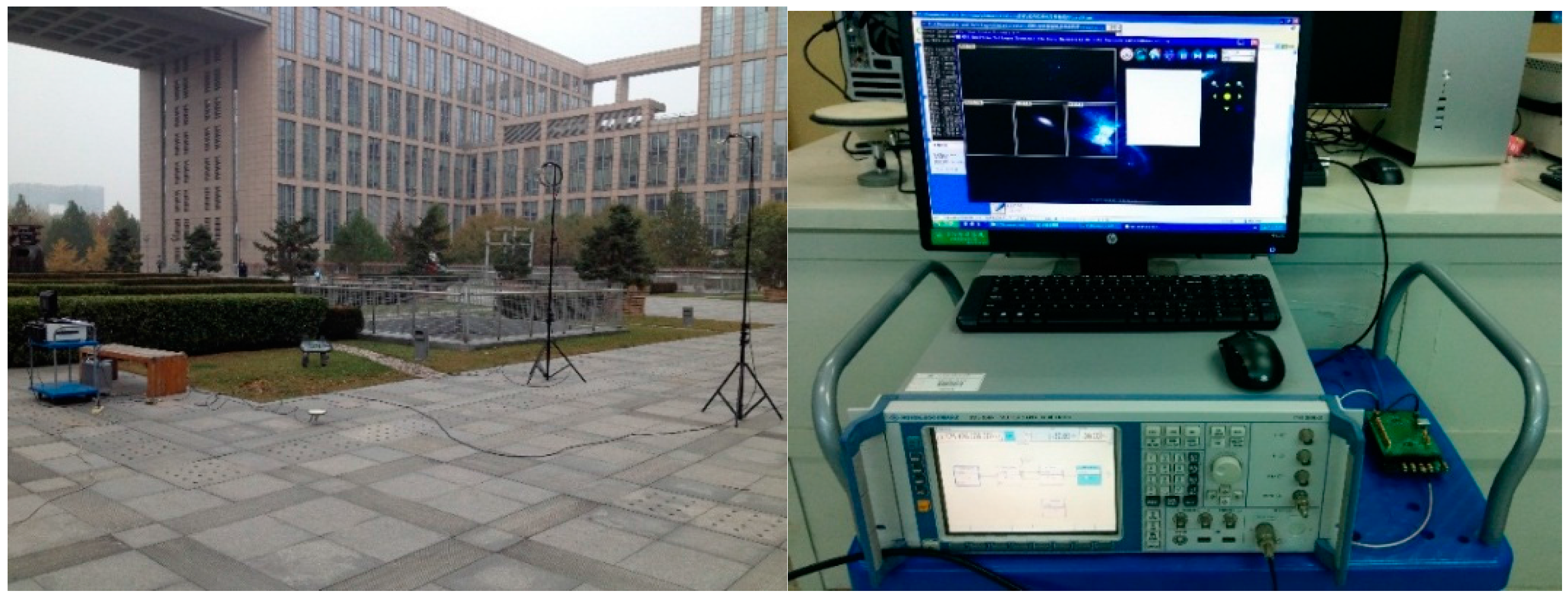
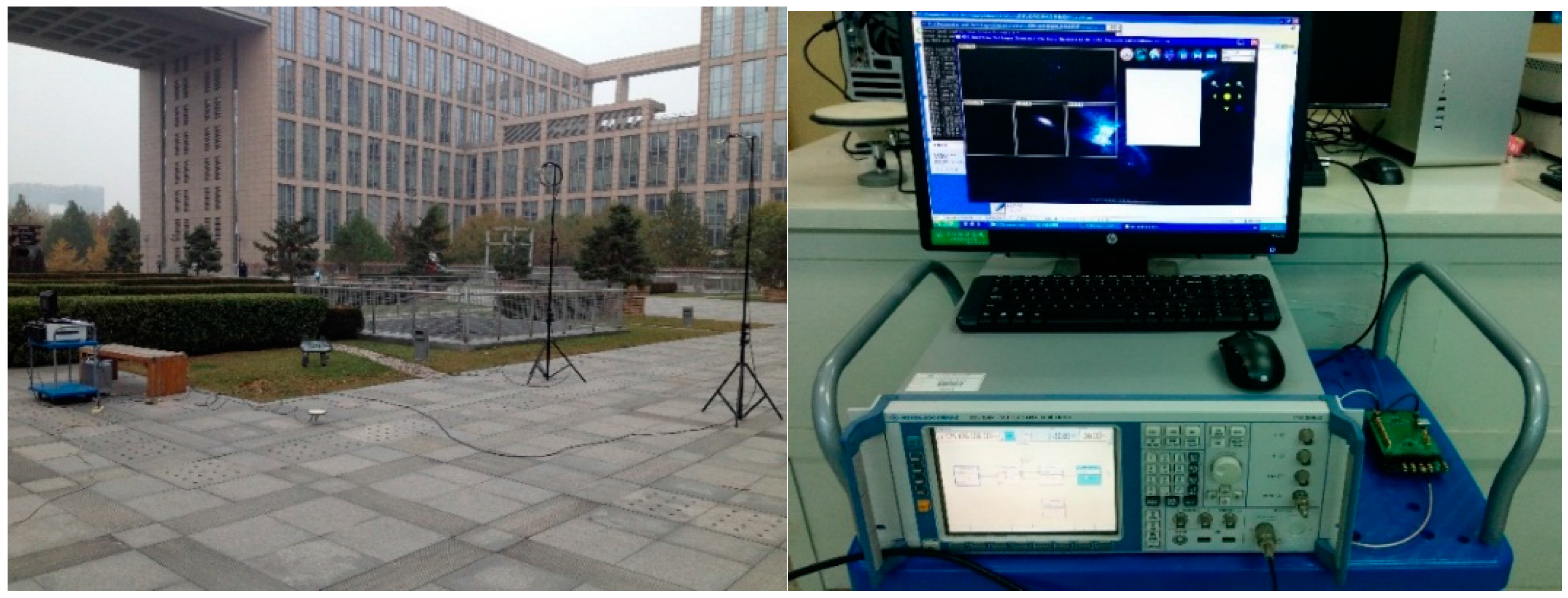
5. Experiments
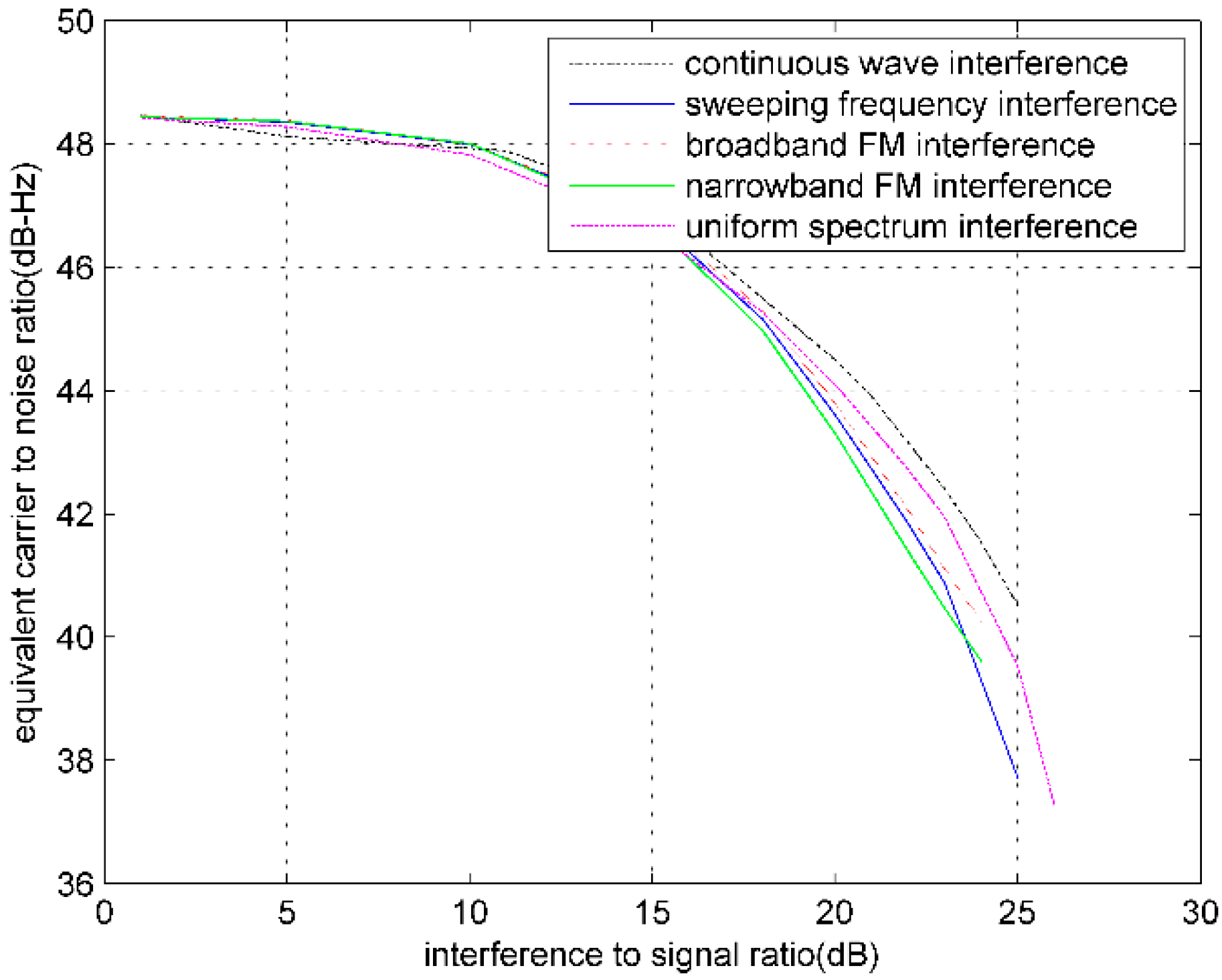
5.1. Experimental Analyses of Monitoring Indicators
5.1.1. Influence of Interference on
5.1.2. Correlator Output
5.2. Experiment of Interference Monitoring
5.2.1. Pre-Correlation
5.2.2. Post-Correlation
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Pinker, A.; Smith, C. Vulnerability of the GPS Signal to Jamming. GPS Solut. 1999, 36, 7535–7543. [Google Scholar] [CrossRef]
- Balaei, A.T.; Dempster, A.G. A Statistical Inference Technique for GPS Interference Detection. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 1499–1511. [Google Scholar] [CrossRef]
- O’Driscoll, C.; Murphy, C.C. A simple technique for the detection of multiple access interference in the parallel acquisition of weak GPS signals. In Proceedings of the 20th International Technical Meeting of the Satellite Division of the Institute of Navigation ION GNSS 2007, Fort Worth, TX, USA, 25–28 September 2007; pp. 282–291.
- Capozza, P.T.; Holland, B.J.; Hopkinson, T.M.; Li, C.; Moulin, D.; Pacheco, P.; Rifkin, R. Measured effects of a narrowband interference suppressor on GPS receivers. In Proceedings of the 55th Annual Meeting of the Institute of Navigation, Cambridge, MA, USA, 27–30 June 1999; pp. 645–651.
- Balaei, A.T.; Motella, B.; Dempster, A.G. GPS interference detected in Sydney-Australia. In Proceedings of the International Global Navigation Satellite Systems Society Symposium IGNSS 2007, Sydney, Australia, 4–6 December 2007.
- Thompson, R.J.R.; Wu, J.H.; Balaei, A.T.; Dempster, A.G. Detection of RF interference to GPS using day-to-day C/No differences. In Proceedings of the International Symposium on GPS/GNSS, Taipei, Taiwan, 26–28 October 2010.
- Ouzeau, C.; Macabiau, C.; Roturier, B.; Mabilleau, M. Performance Assessment of Multi correlators Interference Detection and Repair Algorithms for Civil Aviation. In Proceedings of the European Navigation Conference of EUGIN ENC-GNSS, Toulouse, France, 23–25 April 2008.
- Faurie, F.; Giremus, A. Bayesian detection of interference in satellite navigation systems. In Proceedings of the IEEE International Conference on Acoustics, Speech, and Signal Processing ICASSP 2011, Prague, Czech Republic, 22–27 May 2011; pp. 4348–4351.
- Wilson, D.; Ganguly, S. Flexible GPS receiver for jammer detection, characterization and mitigation using a 3D CRPA. In Proceedings of the 19th International Technical Meeting of the Satellite Division of the Institute of Navigation ION GNSS 2006, Fort Worth, TX, USA, 26–29 September 2006; pp. 189–200.
- Baesens, B.; van Gestel, T.; Viaene, S.; Stepanova, M.; Suykens, J.; Vanthienen, J. Benchmarking state-of-the-art classification algorithms for credit scoring. J. Oper. Res. Soc. 2003, 54, 627–635. [Google Scholar] [CrossRef]
- Deng, N.Y.; Tian, Y.J. A New Method in Data Mining-Support Vector Machines; Science Press: Beijing, China, 2003. [Google Scholar]
- Platt, J.C. Fast training of support vector machines using sequential minimal optimization. In Advances in Kernel Methods-Support Vector Learning; Scholkopf, B., Burgers, C.J.C., Smola, A.J., Eds.; MIT Press: Cambridge, MA, USA, 1999; pp. 185–208. [Google Scholar]
- Lang, R.L.; Deng, X.L.; Gao, F. The Heuristic Algorithms for Selecting the Parameters of Support Vector Machine for Classification. Chin. J. Electron. 2012, 21, 485–488. [Google Scholar]
- Shao, Y.H.; Zhang, C.H.; Wang, X.B.; Deng, N.Y. Improvements on Twin Support Vector Machines. IEEE. Trans. Neural Netw. 2011, 22, 962–968. [Google Scholar] [CrossRef] [PubMed]
- Tian, Y.J.; Ju, X.C.; Qi, Z.Q.; Shi, Y. Improved twin support vector machine. Sci. China Math. 2014, 57, 417–432. [Google Scholar] [CrossRef]
- Kumar, M.A.; Gopal, M. Least squares twin support vector machines for pattern classification. Expert Syst. Appl. 2009, 36, 7535–7543. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Training Algorithm | Interference Strength (dB) | Training Time (ms) | Monitoring Time (μs) | Monitoring Precision (%) |
|---|---|---|---|---|
| Standard SVM | 60 | 15 | 100 | |
| 100 | ||||
| 100 | ||||
| 100 | ||||
| LS-TWSVM | 0.75 | 15 | 100 | |
| 100 | ||||
| 100 | ||||
| 100 |
| Training Algorithm | Interference Strength (dB) | Training Time (ms) | Monitoring Time (μs) | Monitoring Precision (%) |
|---|---|---|---|---|
| Standard SVM | 5.3 | 15 | 100 | |
| 100 | ||||
| 100 | ||||
| 100 | ||||
| LS-TWSVM | 0.71 | 15 | 100 | |
| 100 | ||||
| 100 | ||||
| 100 |
| Training Algorithm | Interference Strength (dB) | Training Time (ms) | Monitoring Time (μs) | Monitoring Precision (%) |
|---|---|---|---|---|
| Standard SVM | Broadband | 54 | 15 | 100 |
| Narrowband | 100 | |||
| LS-TWSVM | Broadband | 0.99 | 15 | 100 |
| Narrowband | 100 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, W.; Huang, Z.; Lang, R.; Qin, H.; Zhou, K.; Cao, Y. A Real-Time Interference Monitoring Technique for GNSS Based on a Twin Support Vector Machine Method. Sensors 2016, 16, 329. https://doi.org/10.3390/s16030329
Li W, Huang Z, Lang R, Qin H, Zhou K, Cao Y. A Real-Time Interference Monitoring Technique for GNSS Based on a Twin Support Vector Machine Method. Sensors. 2016; 16(3):329. https://doi.org/10.3390/s16030329
Chicago/Turabian StyleLi, Wutao, Zhigang Huang, Rongling Lang, Honglei Qin, Kai Zhou, and Yongbin Cao. 2016. "A Real-Time Interference Monitoring Technique for GNSS Based on a Twin Support Vector Machine Method" Sensors 16, no. 3: 329. https://doi.org/10.3390/s16030329