
An Accurate GPS-IMU/DR Data Fusion Method for Driverless Car Based on a Set of Predictive Models and Grid Constraints


Abstract
:1. Introduction
2. Accurate GPS–IMU/DR Data Fusion Method
2.1. Occupancy Grid Constraints-Based Local Navigation
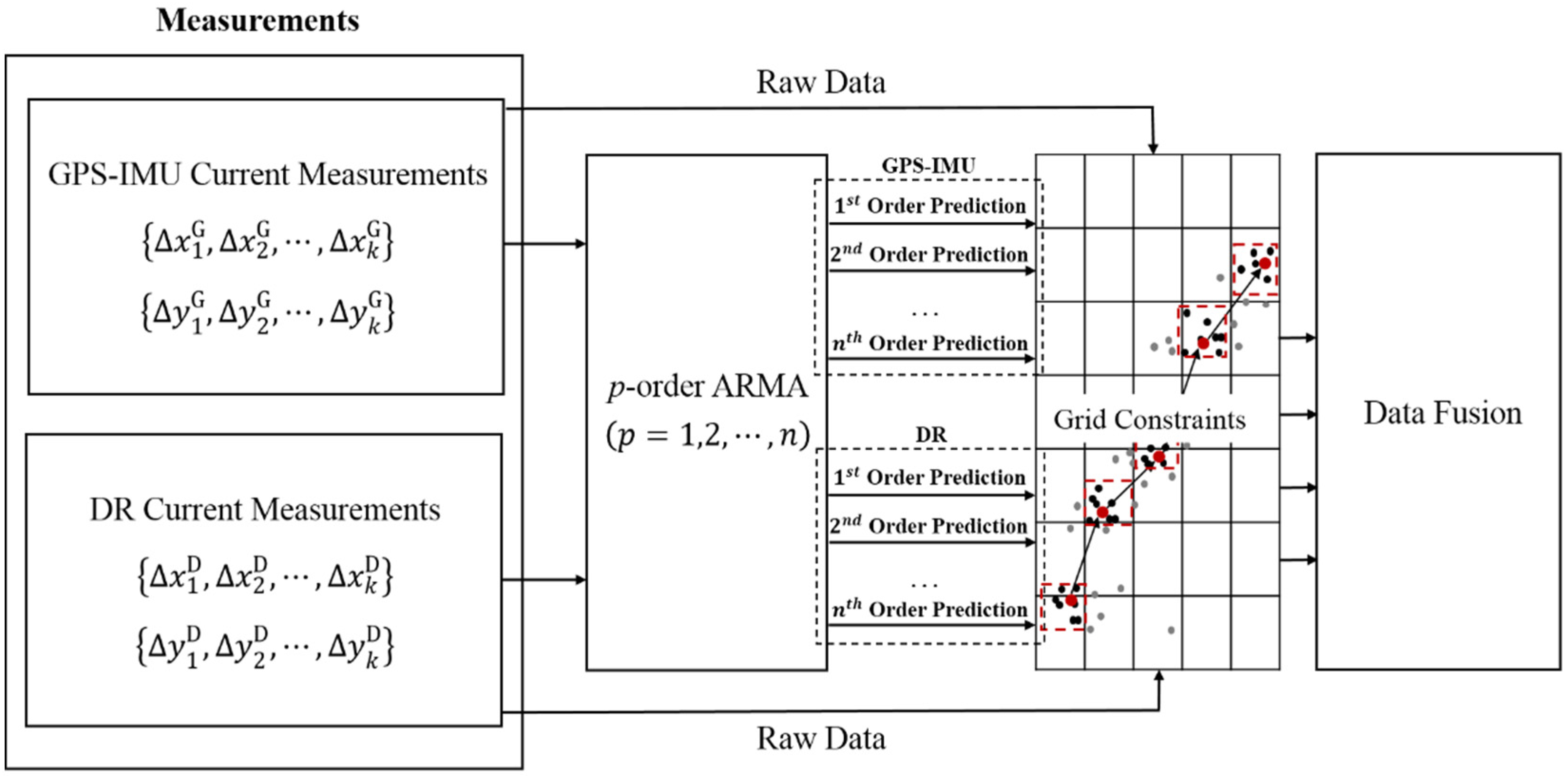
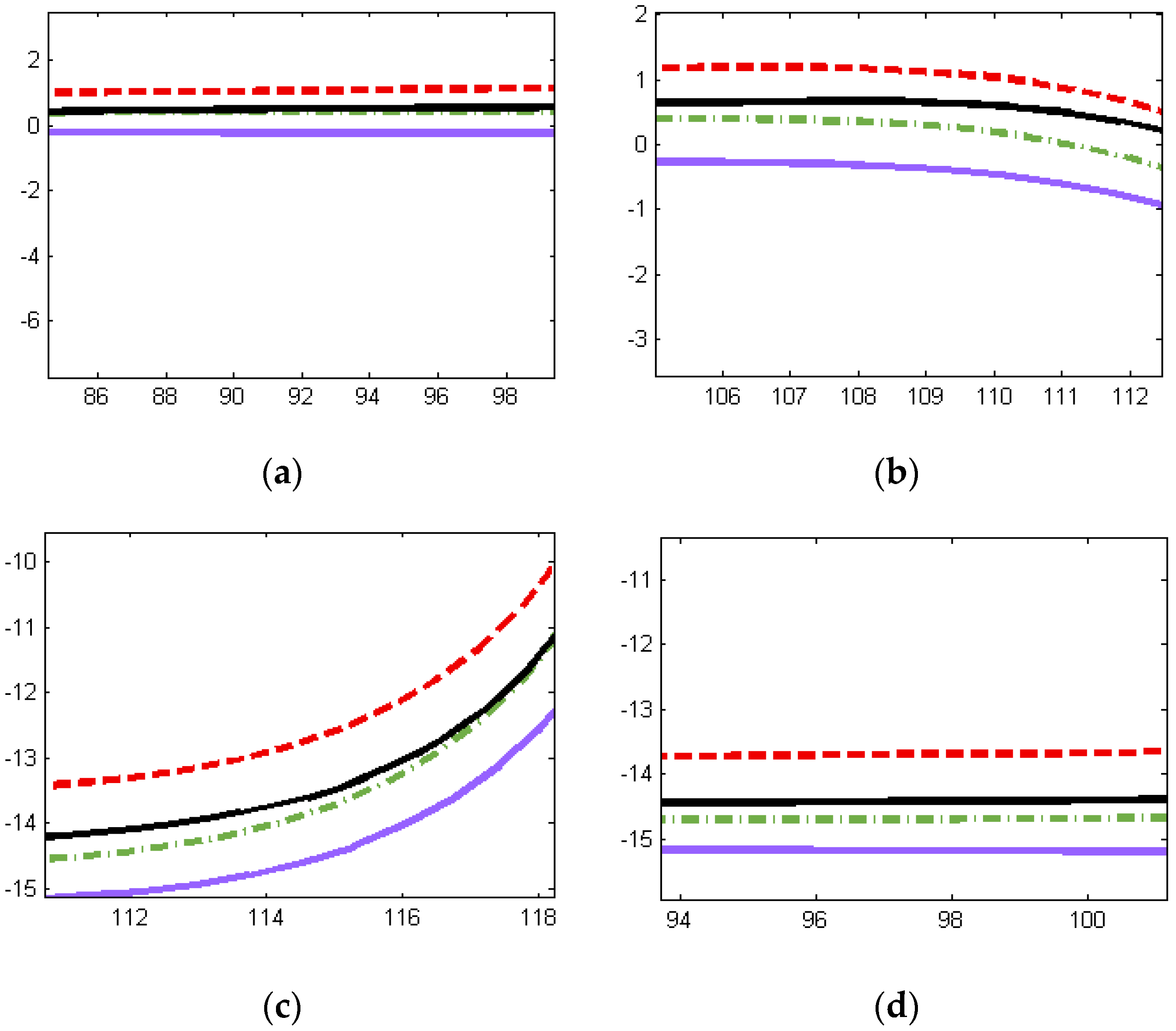
2.2. Prediction Using a Set of ARMA Models with Different Orders
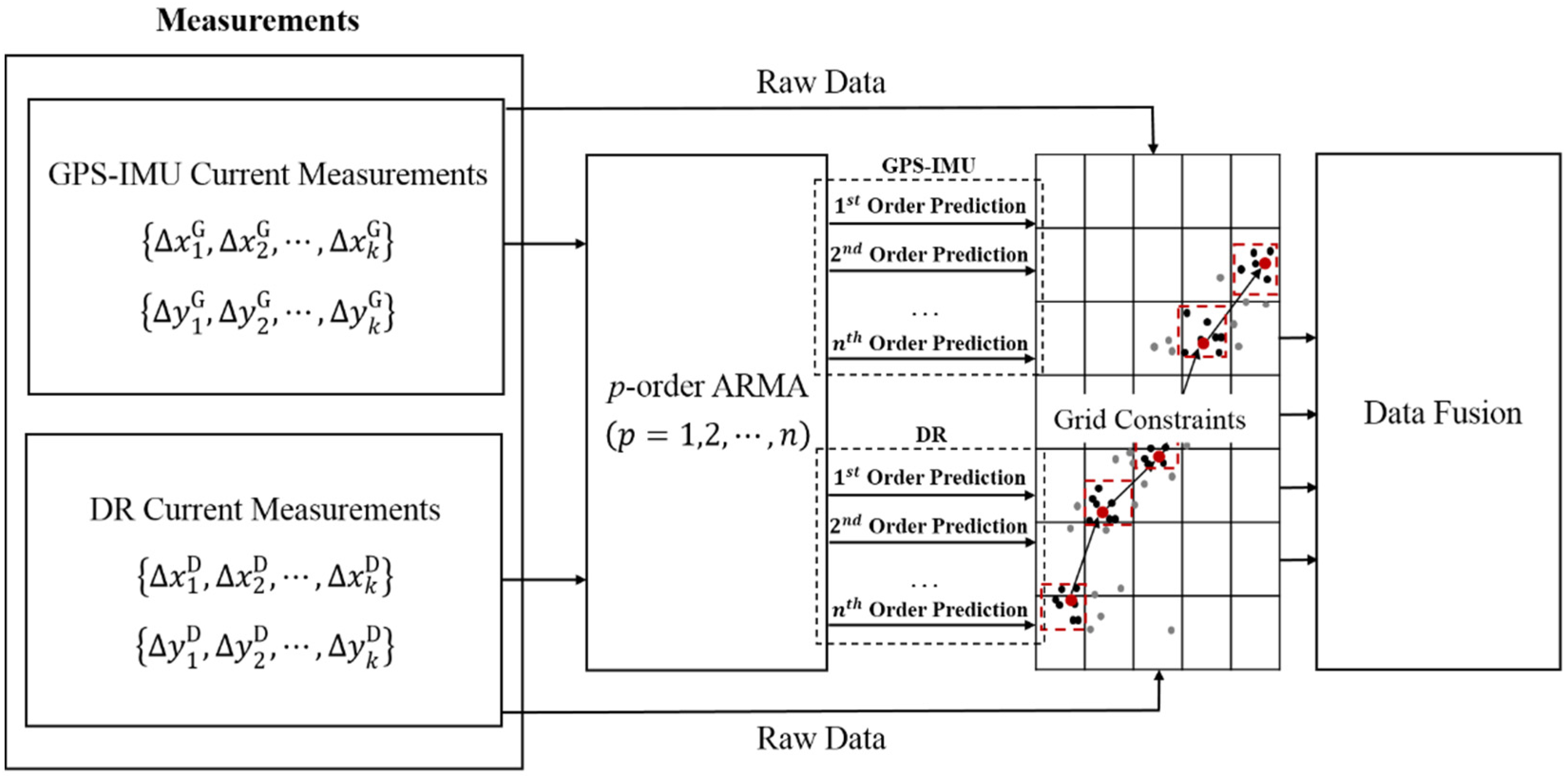
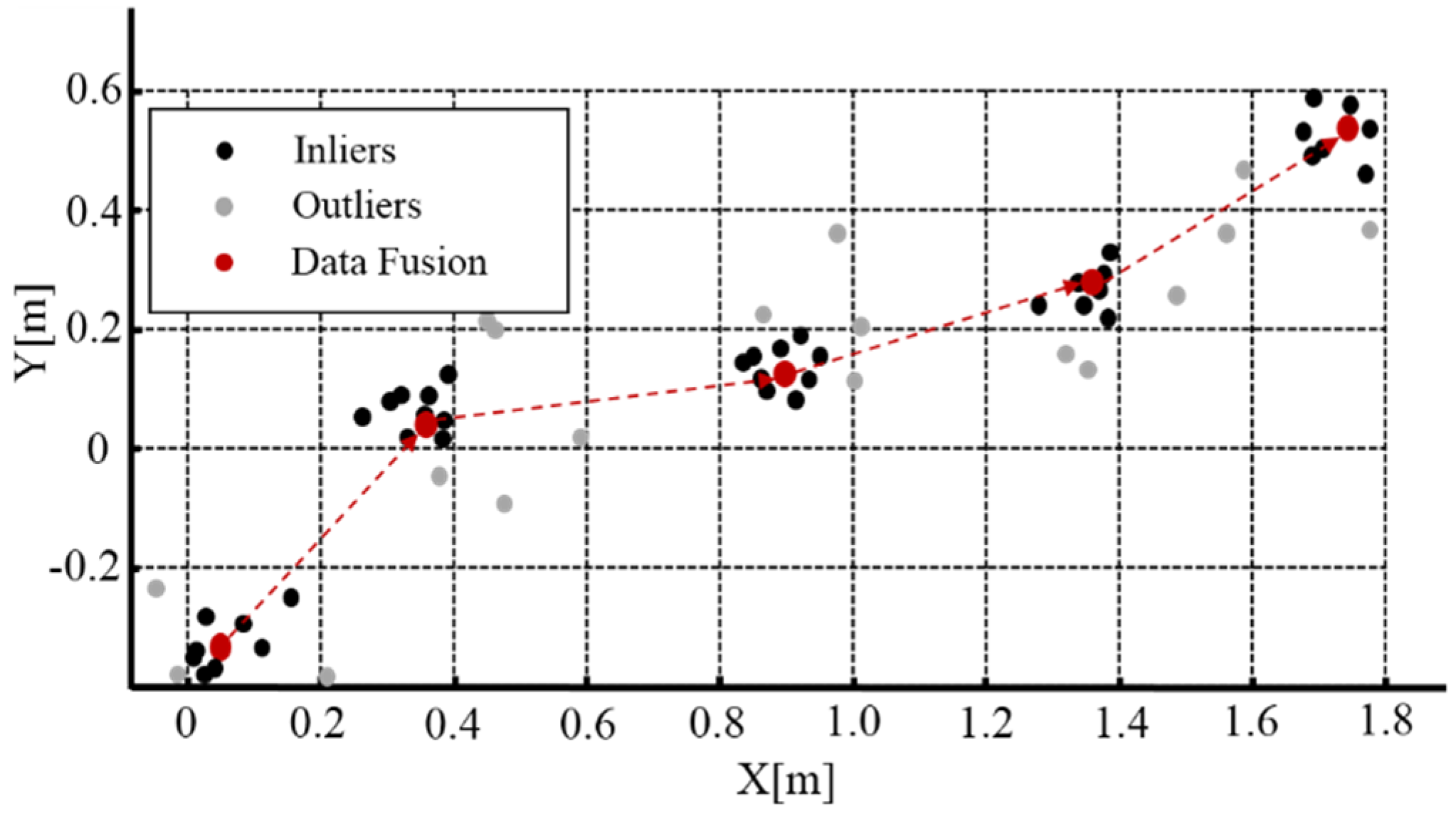
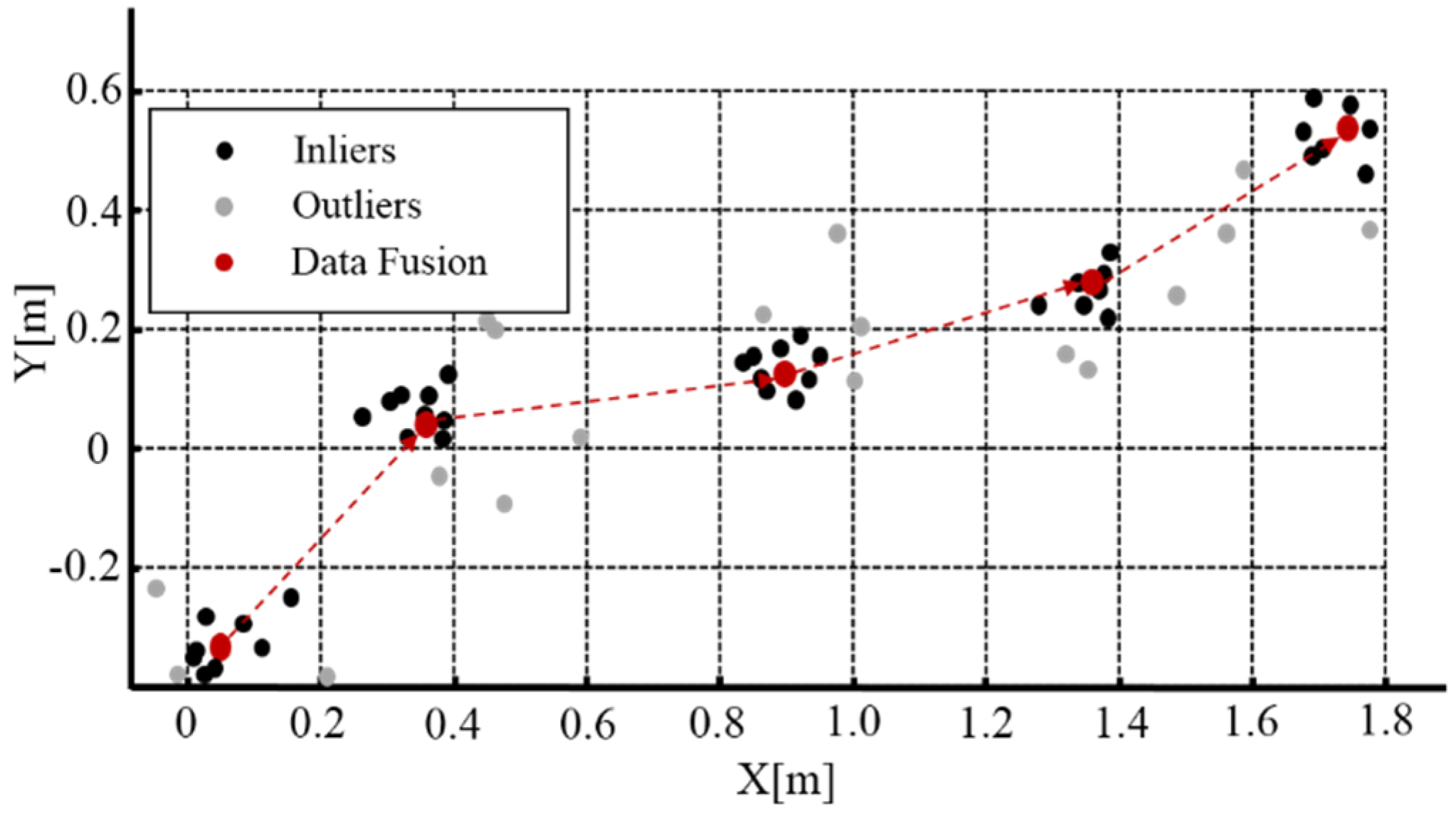
2.3. Accurate Data Fusion Method
| Algorithm 1. Spatial Consensus Check |
| Input: |
| Output: |
| for i = 1 to n do |
| end |
| for i = 1 to Max_iters do |
| Compute the distance of all points to centroid points. |
| For a point , denotes |
| if , then |
| Remove this point. |
| Update or . |
| end |
| end |
3. Experimental Results
3.1. Analysis of Raw Navigation Data
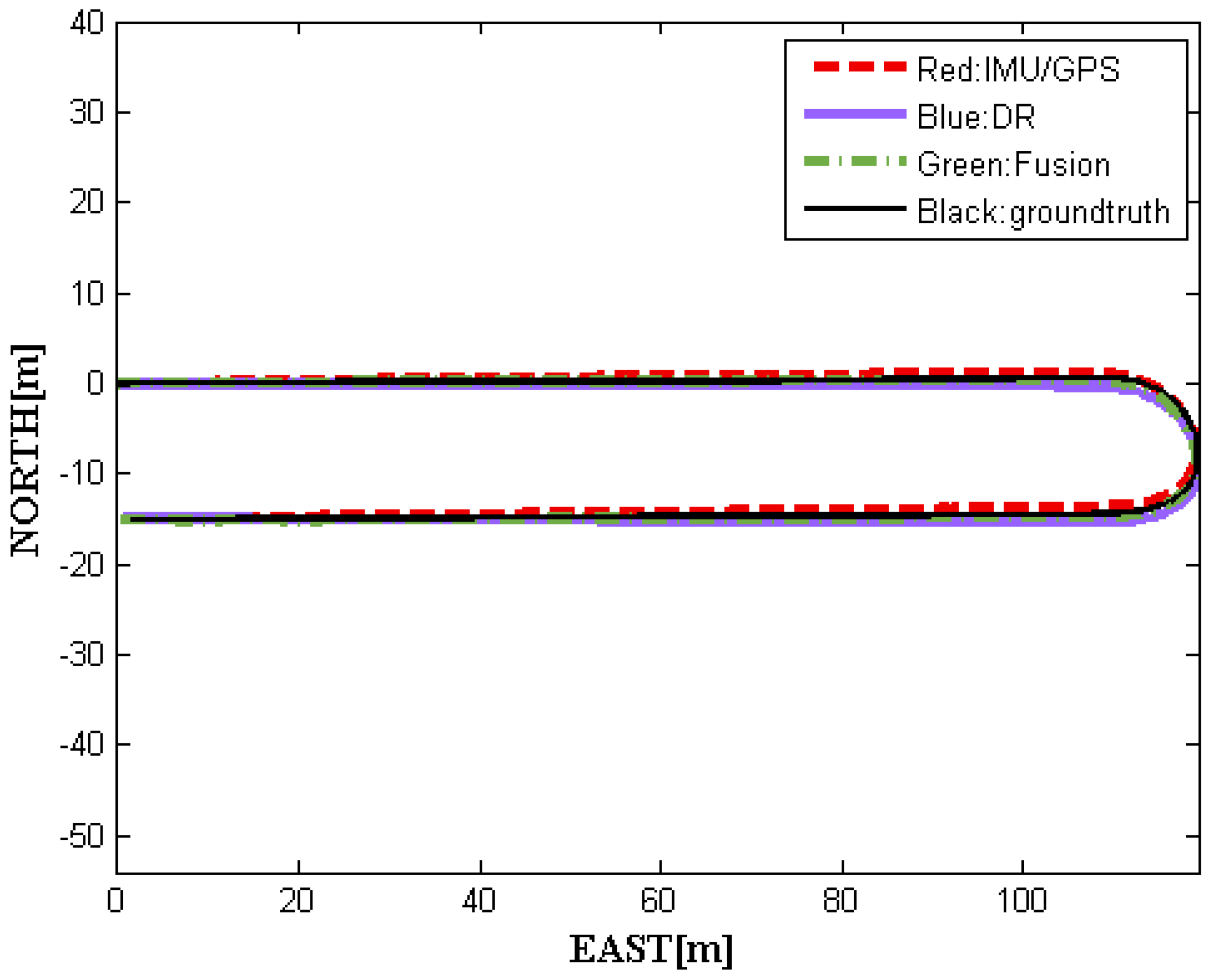
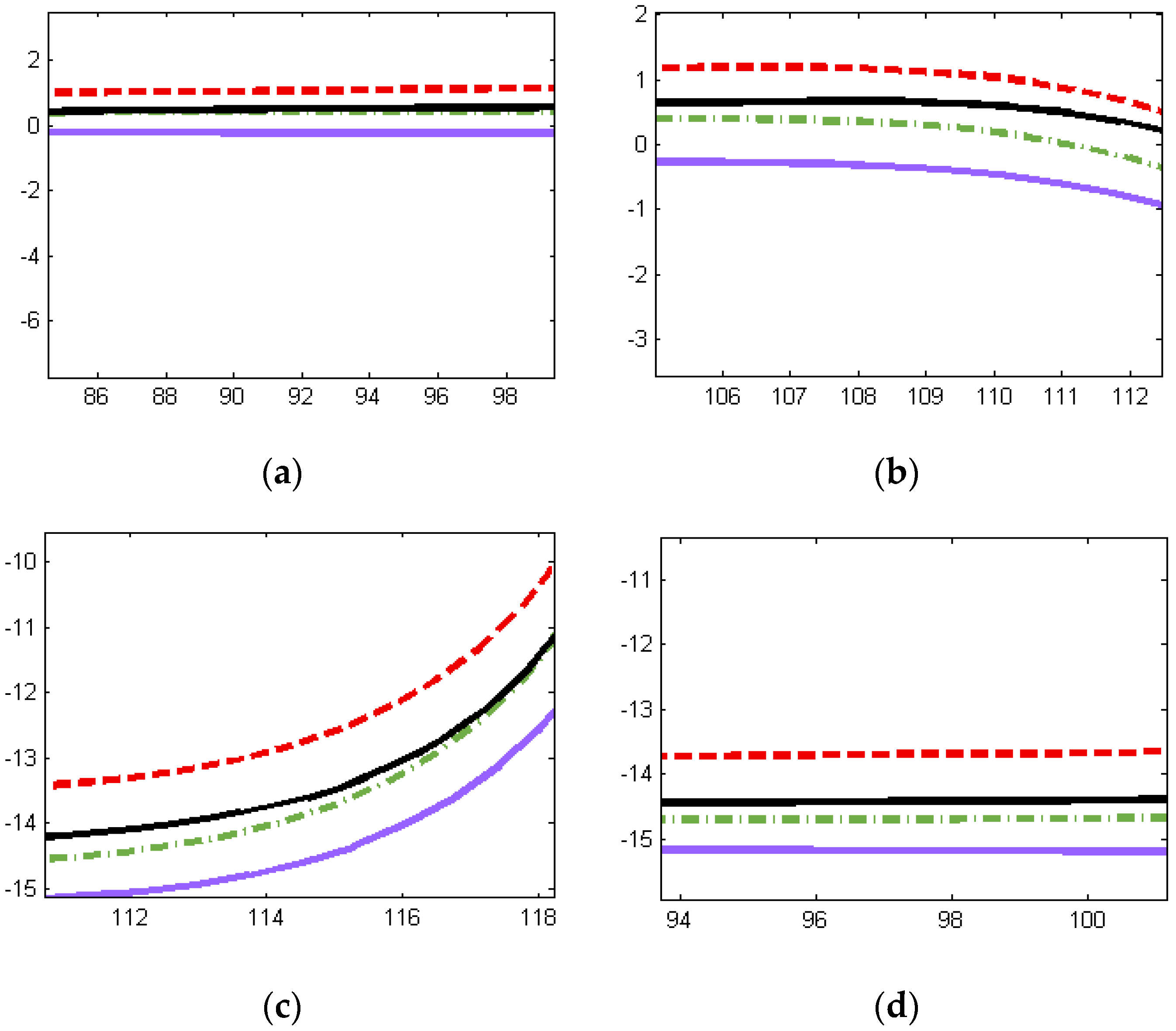
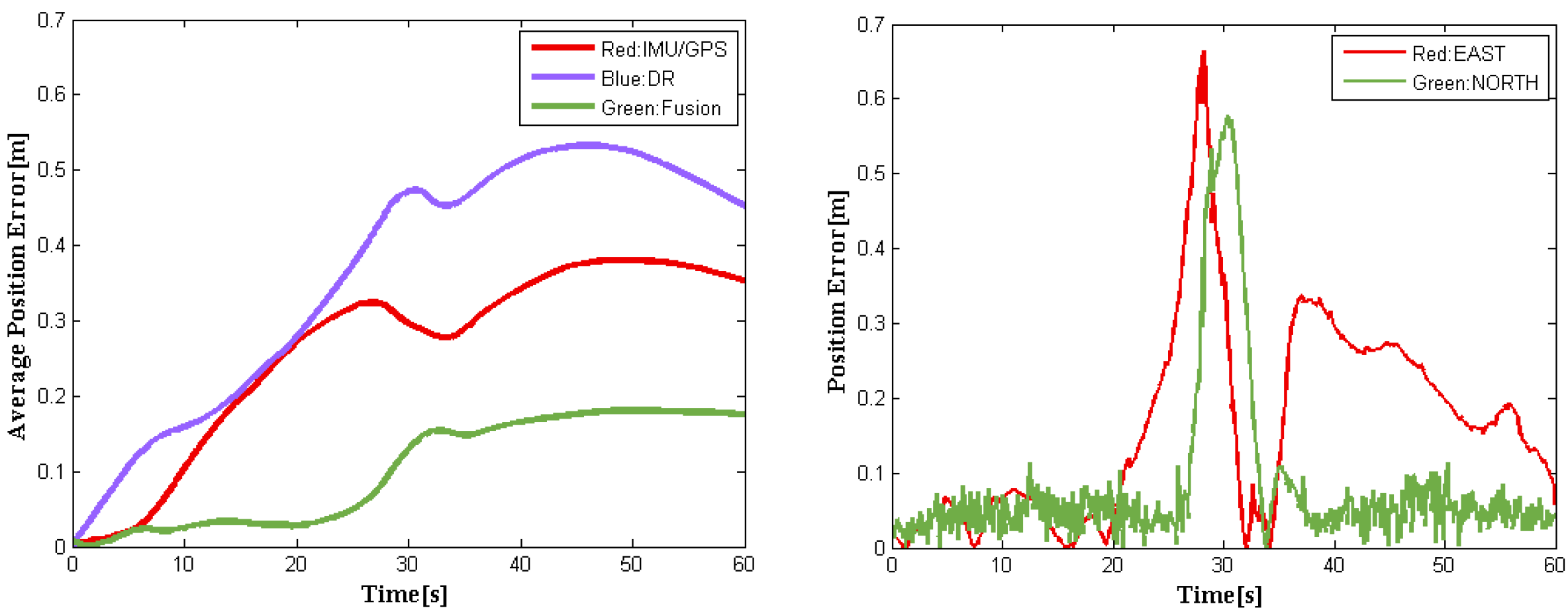
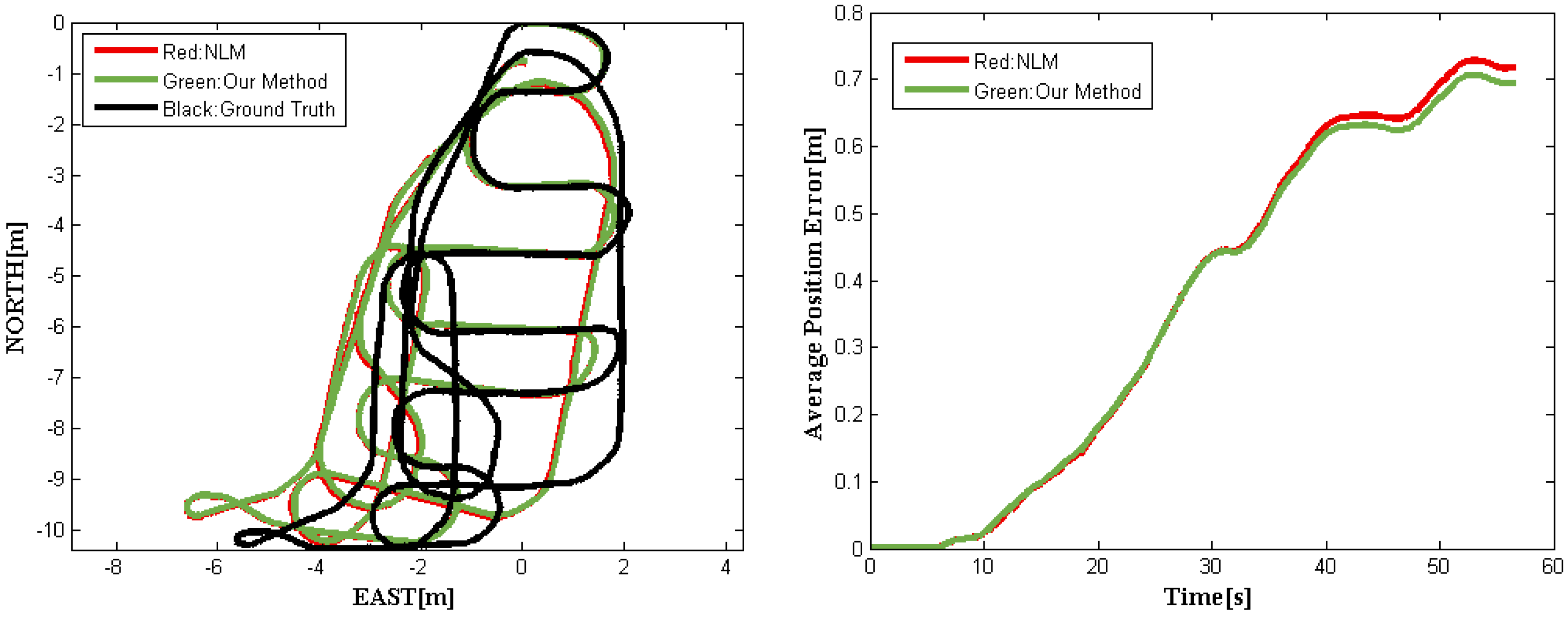
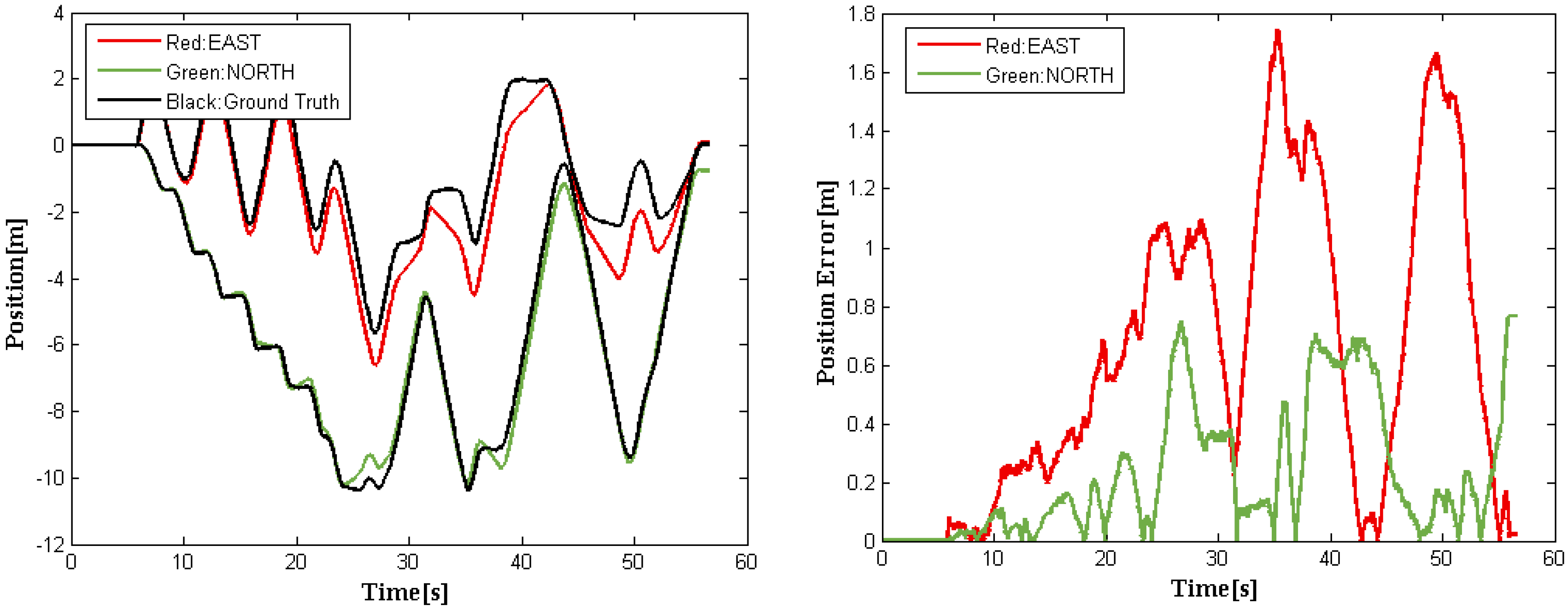
3.2. Comparative Study
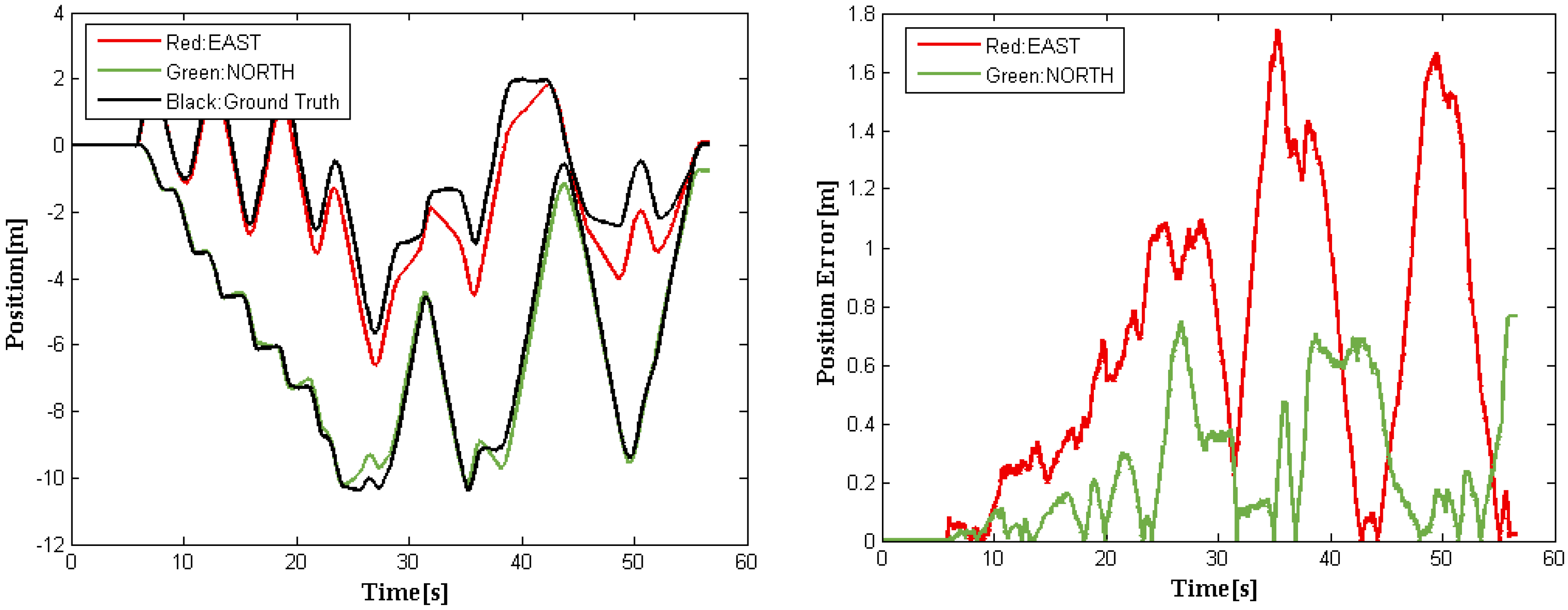
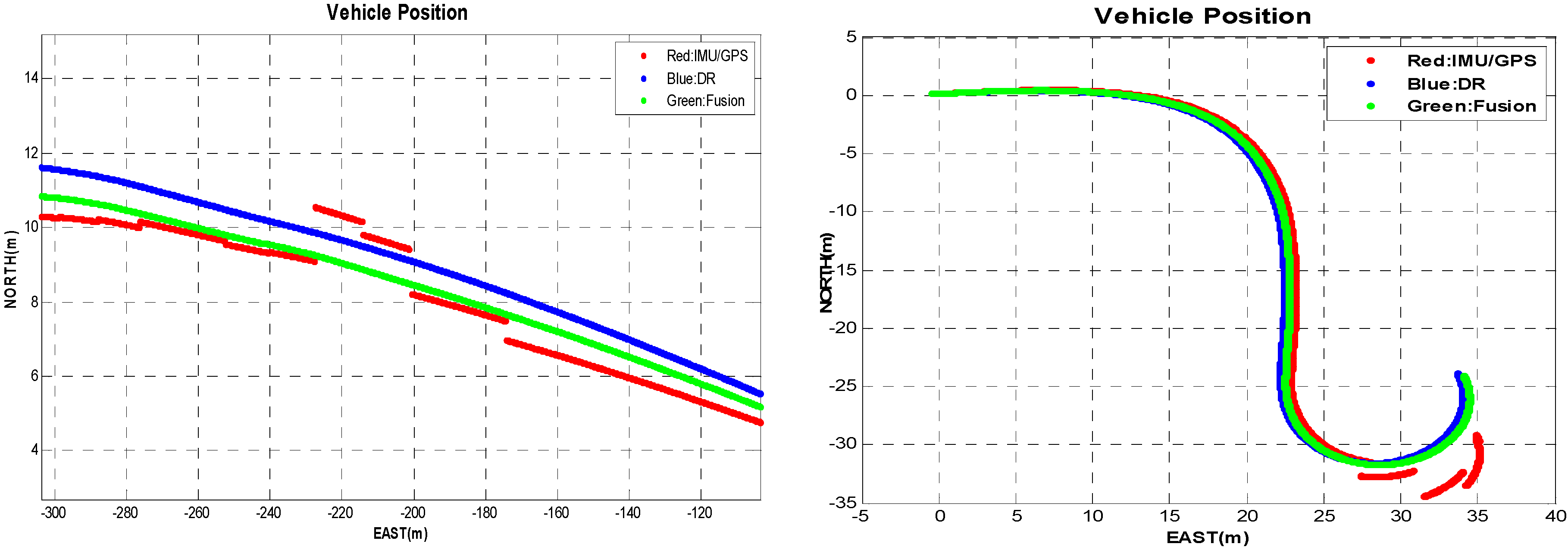
3.3. Data Fusion Results with Interrupted GPS–IMU Signal
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Bouvet, D.; Garcia, G. Improving the accuracy of dynamic localization systems using RTK GPS by identifying the GPS latency. In Proceedings of the IEEE International Conference on the Robotics and Automation (ICRA), San Francisco, CA, USA, 24–28 April 2000; Volume 3, pp. 2525–2530.
- Karim Al-Jewari, Y.H.; Ahmad, R.B.; AlRawi, A.A.A. Impact of multipath interference and change of velocity on the reliability and precision of GPS. In Proceedings of the 2nd International Conference on the Electronic Design (ICED), Penang, Malaysia, 19–21 August 2014; pp. 427–430.
- Chen, X.; Dovis, F.; Peng, S.; Morton, Y. Comparative studies of GPS multipath mitigation methods performance. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 1555–1568. [Google Scholar] [CrossRef]
- Oryschuk, P.; Salerno, A.; Al-Husseini, A.M.; Angeles, J. Experimental validation of an underactuated two-wheeled mobile robot. IEEE ASME Trans. Mechatron. 2009, 14, 252–257. [Google Scholar] [CrossRef]
- Kleeman, L. Optimal estimation of position and heading for mobile robots using ultrasonic beacons and dead-reckoning. In Proceedings of the IEEE International Conference on the Robotics and Automation, Nice, France, 12–14 May 1992; Volume 3, pp. 2582–2587.
- Yi, J.; Zhang, J.; Song, D.; Jayasuriya, S. IMU-based localization and slip estimation for skid-steered mobile robots. In Proceedings of the IEEE/RSJ International Conference on the Intelligent Robots and Systems (IROS), San Diego, CA, USA, 29 October–2 November 2007; pp. 2845–2850.
- Jo, K.; Chu, K.; Sunwoo, M. GPS-bias correction for precise localization of autonomous vehicles. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Gold Coast, Australia, 23–26 June 2013; pp. 636–641.
- Aghili, F.; Salerno, A. Driftless 3-D attitude determination and positioning of mobile robots by integration of IMU with two RTK GPSs. IEEE ASME Trans. Mechatron. 2013, 18, 21–31. [Google Scholar] [CrossRef]
- Arsenault, A.; Velinsky, S.A.; Lasky, T.A. A low-cost sensor array and test platform for automated roadside mowing. IEEE ASME Trans. Mechatron. 2011, 16, 592–597. [Google Scholar] [CrossRef]
- Ilyas, M.; Yang, Y.; Qian, Q.S.; Zhang, R. Low-cost IMU/odometer/GPS integrated navigation aided with two antennae heading measurement for land vehicle application. In Proceedings of the 25th Chinese Control and Decision Conference (CCDC), Guiyang, China, 25–27 May 2013; pp. 4521–4526.
- Salmon, D.C.; Bevly, D.M. An exploration of low-cost sensor and vehicle model solutions for ground vehicle navigation. In Proceedings of the IEEE/ION Position Location and Navigation Symposium (PLANS), Monterey, CA, USA, 5–8 May 2014; pp. 462–471.
- Ma, J.; Susca, S.; Bajracharya, M.; Matthies, L.; Malchano, M.; Wooden, D. Robust multi-sensor, day/night 6-DOF pose estimation for a dynamic legged vehicle in GPS-denied environments. In Proceedings of the IEEE International Conference on the Robotics and Automation (ICRA), Saint Paul, MN, USA, 14–18 May 2012; pp. 619–626.
- Tao, Z.; Bonnifait, P.; Fremont, V.; Ibanez-Guzman, J. Mapping and localization using GPS, lane markings and proprioceptive sensors. In Proceedings of the IEEE/RSJ International Conference on the Intelligent Robots and Systems (IROS), Tokyo, Japan, 3–7 November 2013; pp. 406–412.
- Gruyer, D.; Belaroussi, R.; Revilloud, M. Map-aided localization with lateral perception. In Proceedings of the IEEE Intelligent Vehicles Symposium, Dearborn, MI, USA, 8–11 June 2014; pp. 674–680.
- Simanek, J.; Reinstein, M.; Kubelka, V. Evaluation of the EKF-based estimation architectures for data fusion in mobile robots. IEEE ASME Trans. Mechatron. 2015, 20, 985–990. [Google Scholar] [CrossRef]
- Nemra, A.; Aouf, N. Robust INS/GPS sensor fusion for UAV localization using SDRE nonlinear filtering. IEEE Sens. J. 2010, 10, 789–798. [Google Scholar] [CrossRef]
- Shin, E.-H. Estimation Techniques For Low-Cost Inertial Navigation; UCGE Reports Number 20219; Department of Geomatics Engineering, University of Calgary: Calgary, AB, Canada, 2005. [Google Scholar]
- Kubelka, V.; Reinstein, M. Complementary filtering approach to orientation estimation using inertial sensors only. In Proceedings of the IEEE International Conference on the Robotics and Automation (ICRA), Saint Paul, MN, USA, 14–18 May 2012; pp. 599–605.
- Vasconcelos, J.F.; Cardeira, B.; Silvestre, C.; Oliveira, P.; Batista, P. Discrete-time complementary filters for attitude and position estimation: design, analysis and experimental validation. IEEE Trans. Control Syst. Technol. 2011, 19, 181–198. [Google Scholar] [CrossRef]
- Brink, K.; Soloviev, A. Filter-based calibration for an IMU and multi-camera system. In Proceedings of the IEEE/ION Position Location and Navigation Symposium (PLANS), Myrtle Beach, SC, USA, 23–26 April 2012; pp. 730–739.
- Mebarki, R.; Lippiello, V. Image moments-based velocity estimation of UAVs in GPS denied environments. In Proceedings of the IEEE International Symposium on the Safety, Security, and Rescue Robotics (SSRR), Hokkaido, Japan, 27–30 October 2014; pp. 1–6.
- Vincenzo Angelino, C.; Baraniello, V.R.; Cicala, L. High altitude UAV navigation using IMU, GPS and camera. In Proceedings of the 16th International Conference on the Information Fusion (FUSION), Istanbul, Turkey, 9–12 July 2013; pp. 647–654.
- Taylor, C.N. An analysis of observability-constrained Kalman filtering for vision-aided navigation. In Proceedings of the IEEE/ION Position Location and Navigation Symposium (PLANS), Myrtle Beach, SC, USA, 23–26 April 2012; pp. 1240–1246.
- De Gooijer, J.G.; Abraham, B.; Gould, A.; Robinson, L. Methods for determining the order of an autoregressive-moving average process: A survey. Int. Stat. Rev. 1985, 53, 301–329. [Google Scholar]
- Akaike, H. Fitting autoregressive models for prediction. Ann. Inst. Stat. Math. 1969, 21, 243–247. [Google Scholar] [CrossRef]
- Akaike, H. Information theory and an extension of the maximum likelihood principle. In Selected Papers of Akaike; Parzen, E., Tanabe, K., Kitagawa, G., Eds.; Springer: New York, NY, USA, 1998; pp. 199–213. [Google Scholar]
- Schwarz, G. Estimating the dimension of a model. Ann. Stat. 1978, 6, 461–464. [Google Scholar] [CrossRef]
- Rissanen, J. Modeling by shortest data description. Automatica 1978, 14, 465–471. [Google Scholar] [CrossRef]
- Liang, G.; Wilkes, D.M.; Cadzow, J.A. ARMA model order estimation based on the eigenvalues of the covariance matrix. IEEE Trans. Signal Process. 1993, 41, 3003–3009. [Google Scholar] [CrossRef]
- Ehlers, R.S.; Brooks, S.P. Bayesian Analysis of Order Uncertainty in ARIMA Models. Available online: https://www.researchgate.net/profile/Stephen_Brooks3/publication/228531965_Bayesian_analysis_of_order_uncertainty_in_arima_models/links/00463516679960b00a000000.pdf (accessed on 15 January 2006).
- Cassar, T.; Camilleri, K.P.; Fabri, S.G. Order estimation of multivariate ARMA models. IEEE J. Sel. Top. Signal Process. 2010, 4, 494–503. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (X[m], Y[m]) | #1 | #2 | #3 |
| The driverless car parked at three different locations numbered #1, #2, #3 | |||
| (X_min, Y_min) | (−2521.839, 1990.442) | (−215.399, 190.123) | (−0.013, −0.001) |
| (X_max, Y_max) | (−2515.737, 1990.554) | (−215.393, 190.134) | (0.099,0.397) |
| (X_average, Y_average) | (−2516.651, 1990.461) | (−215.396, 190.129) | (0.038, 0.255) |
| (X_stdev, Y_stdev) | (1.428, 0.022) | (0.001,0.002) | (0.037, 0.128) |
| Approach | North Position RMSE (m) | East Position RMSE (m) | Position RMSE (m) |
|---|---|---|---|
| NLM[15] | 0.8241 | 0.3268 | 0.8865 |
| Our Method | 0.7973 | 0.3171 | 0.8581 |
| NLM | NLM + CF | Our Method | |
|---|---|---|---|
| Cycle duration (ms) | 0.8 | 1.0 | 0.005 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, S.; Deng, Z.; Yin, G. An Accurate GPS-IMU/DR Data Fusion Method for Driverless Car Based on a Set of Predictive Models and Grid Constraints. Sensors 2016, 16, 280. https://doi.org/10.3390/s16030280
Wang S, Deng Z, Yin G. An Accurate GPS-IMU/DR Data Fusion Method for Driverless Car Based on a Set of Predictive Models and Grid Constraints. Sensors. 2016; 16(3):280. https://doi.org/10.3390/s16030280
Chicago/Turabian StyleWang, Shiyao, Zhidong Deng, and Gang Yin. 2016. "An Accurate GPS-IMU/DR Data Fusion Method for Driverless Car Based on a Set of Predictive Models and Grid Constraints" Sensors 16, no. 3: 280. https://doi.org/10.3390/s16030280
APA StyleWang, S., Deng, Z., & Yin, G. (2016). An Accurate GPS-IMU/DR Data Fusion Method for Driverless Car Based on a Set of Predictive Models and Grid Constraints. Sensors, 16(3), 280. https://doi.org/10.3390/s16030280