
DOA and Polarization Estimation Using an Electromagnetic Vector Sensor Uniform Circular Array Based on the ESPRIT Algorithm

Abstract
:1. Introduction
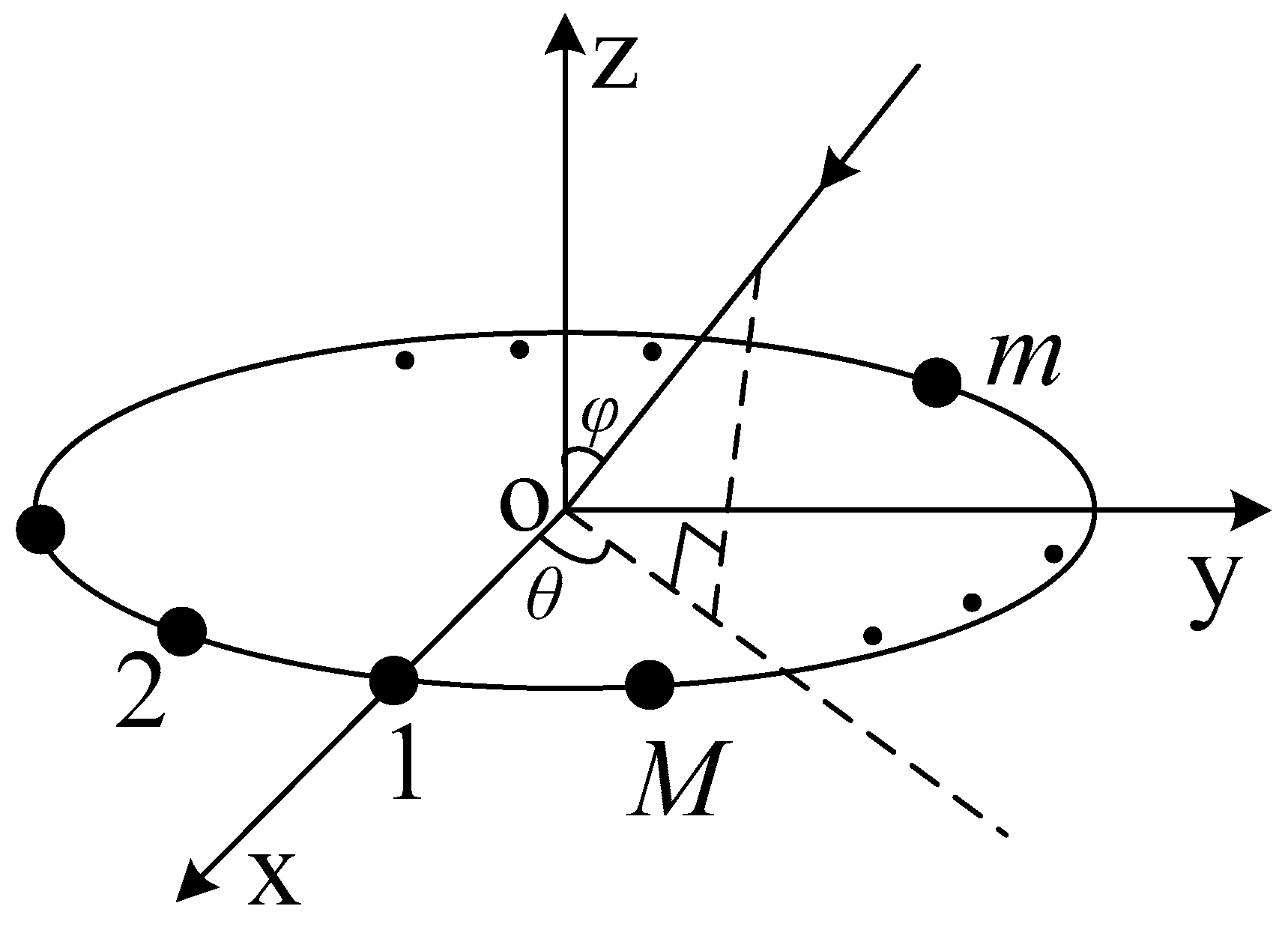
2. Array Signal Model
3. Virtual Array Extension of the Uniform Circular EVSA Consisting of Orthogonal Dipoles
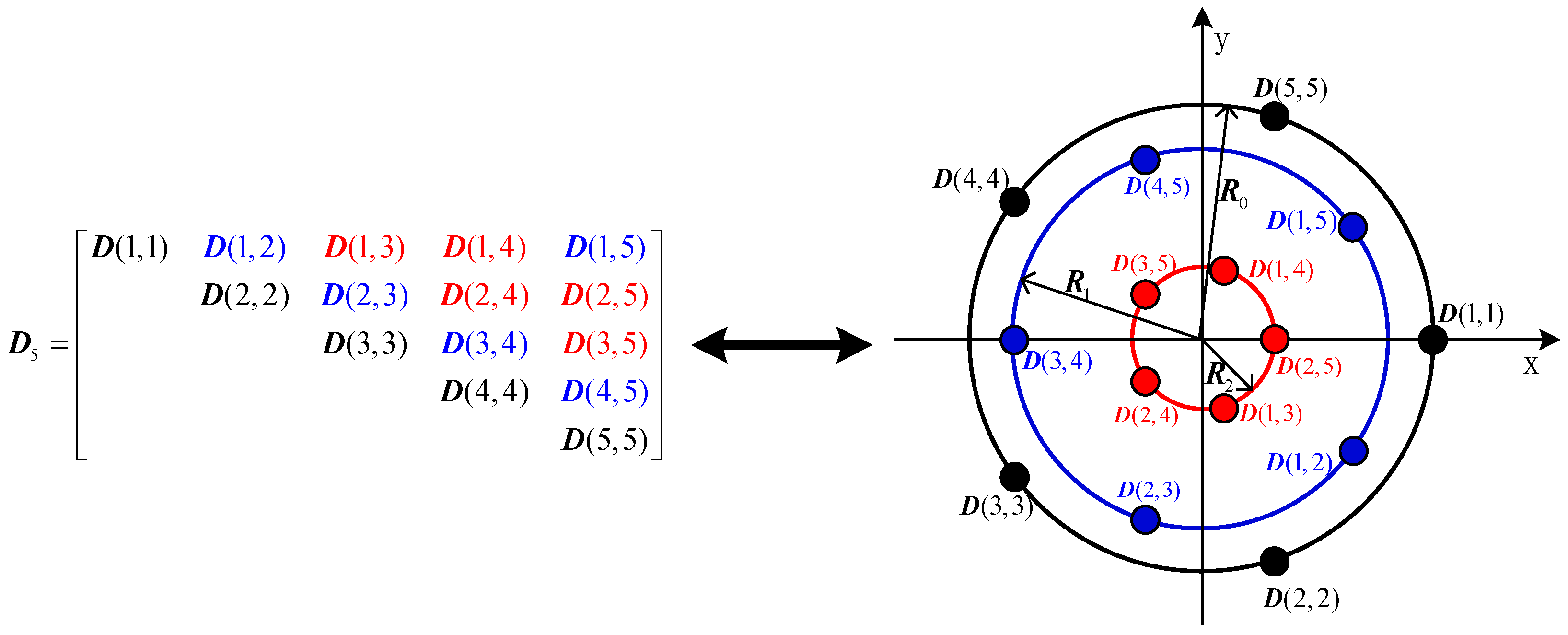
- When the array element number is odd (), the element number of the virtual extended array is , where each element consists of three co-located dipoles. The virtual array consists of concentric uniform circular arrays with the same element number of . The elements of the virtual array corresponding to the elements on the main diagonal of matrix , constitute the largest uniform circular array with the radius of , and the elements located on the -th and -th diagonals which are parallel to the main diagonal of matrix , constitute a uniform circular array with the radius of .For example, the matrix and the virtual array of uniform circular array consisting of five elements are illustrated in Figure 2. is equal to , so that only the 15 upper triangular elements in matrix are shown (Figure 2, left). The right part of Figure 2 shows the virtual array which is equivalent to the matrix . To show the relation of to the virtual array, the elements of and the corresponding antenna elements of the virtual array are marked with the same color. The virtual array is composed of three concentric uniform circular arrays, each of which consists of five elements. The radii of the uniform circular arrays are , and , respectively.
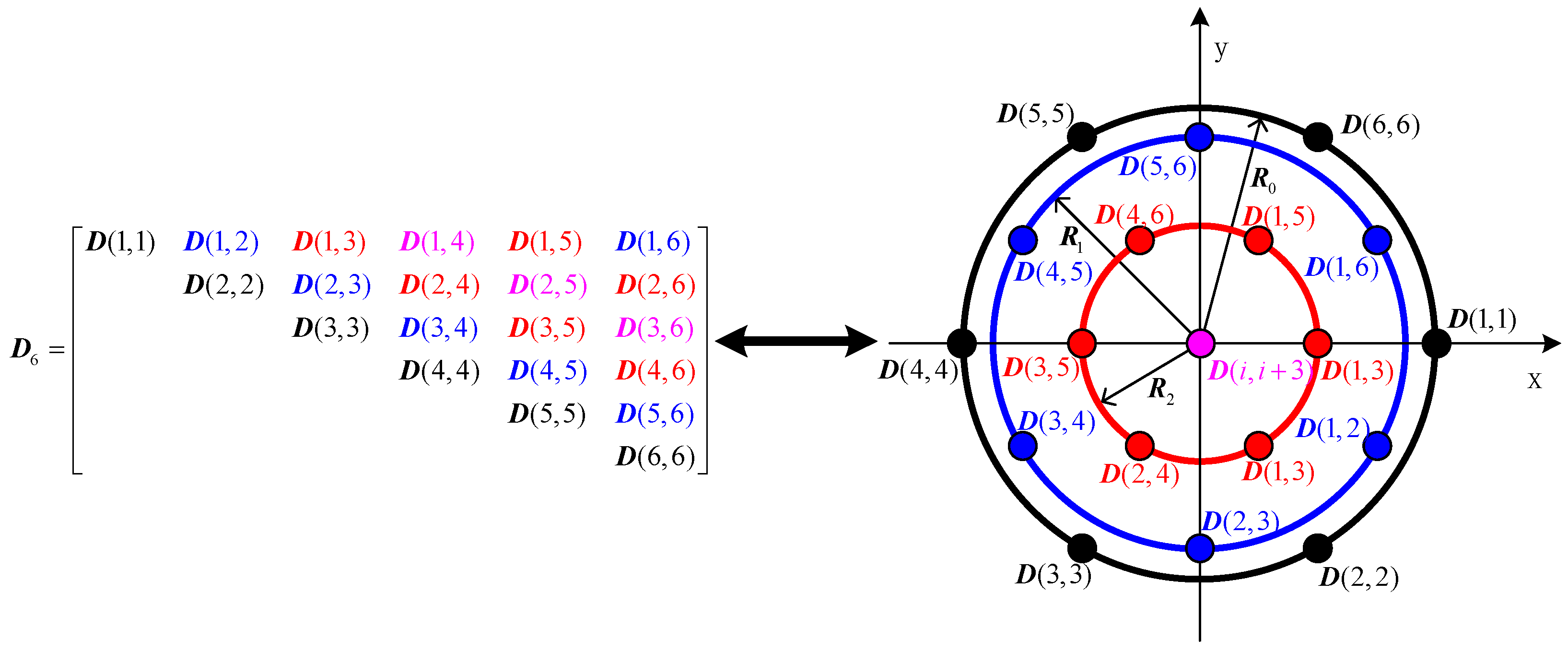
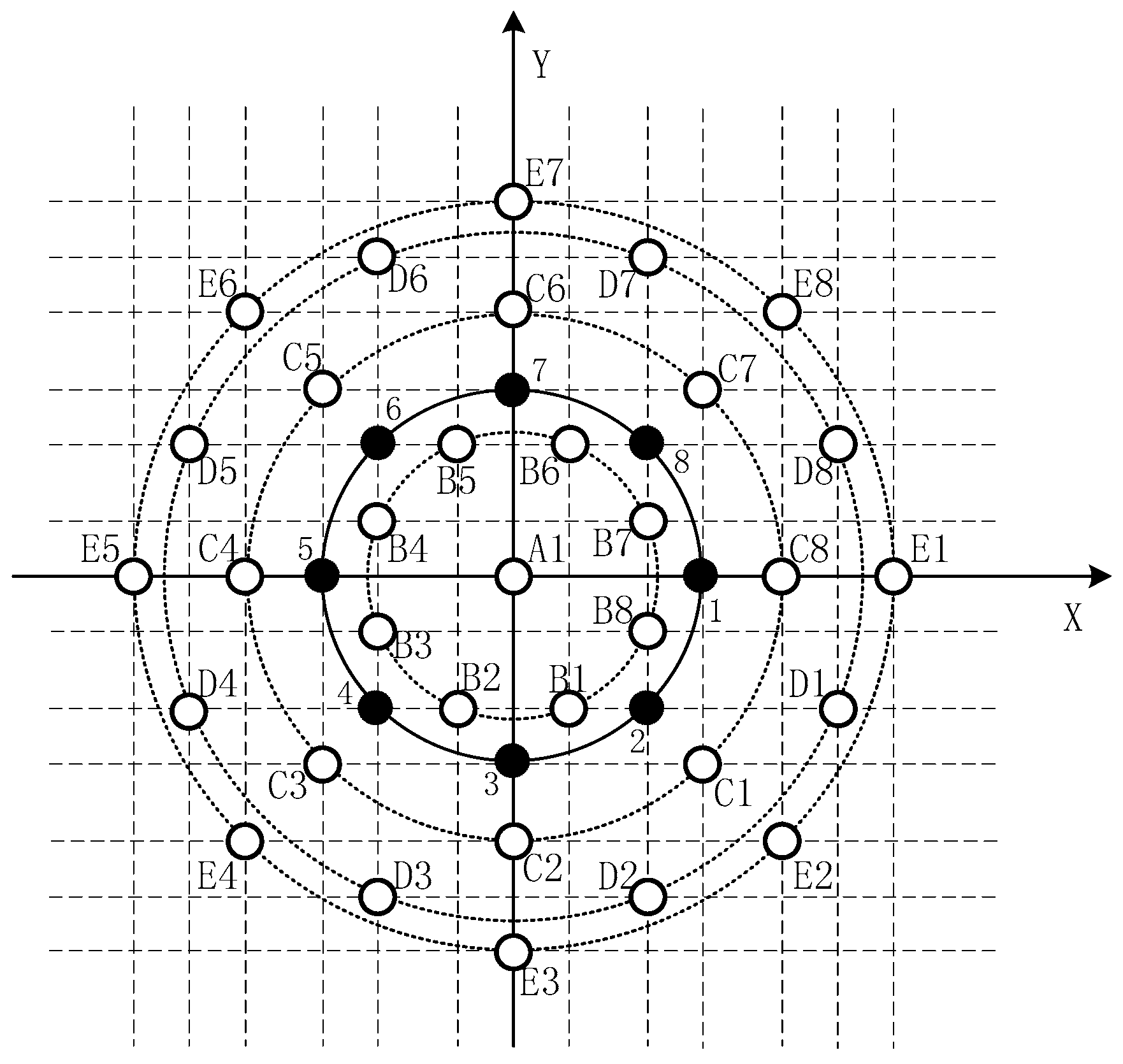
- When the array element number is even (), the element number of the virtual extended array is , where each element consists of three co-located dipoles. The virtual array consists of one element located at the origin of the coordinate system and concentric uniform circular arrays with the same element number of . The elements of virtual array corresponding to the elements on the main diagonal of matrix , constitute the largest uniform circular array of radius , and the elements located on the -th and -th diagonal which are parallel to the main diagonal of matrix , constitute a uniform circular array of radius . The elements located on the -th diagonal of matrix correspond to the virtual elements located at the origin of the coordinate system. In order to express this situation more clearly, an example of a uniform circular array composed of 6 elements is illustrated in Figure 3, where the matrix (left) and the corresponding virtual array (right) are shown.
4. Proposed Algorithm
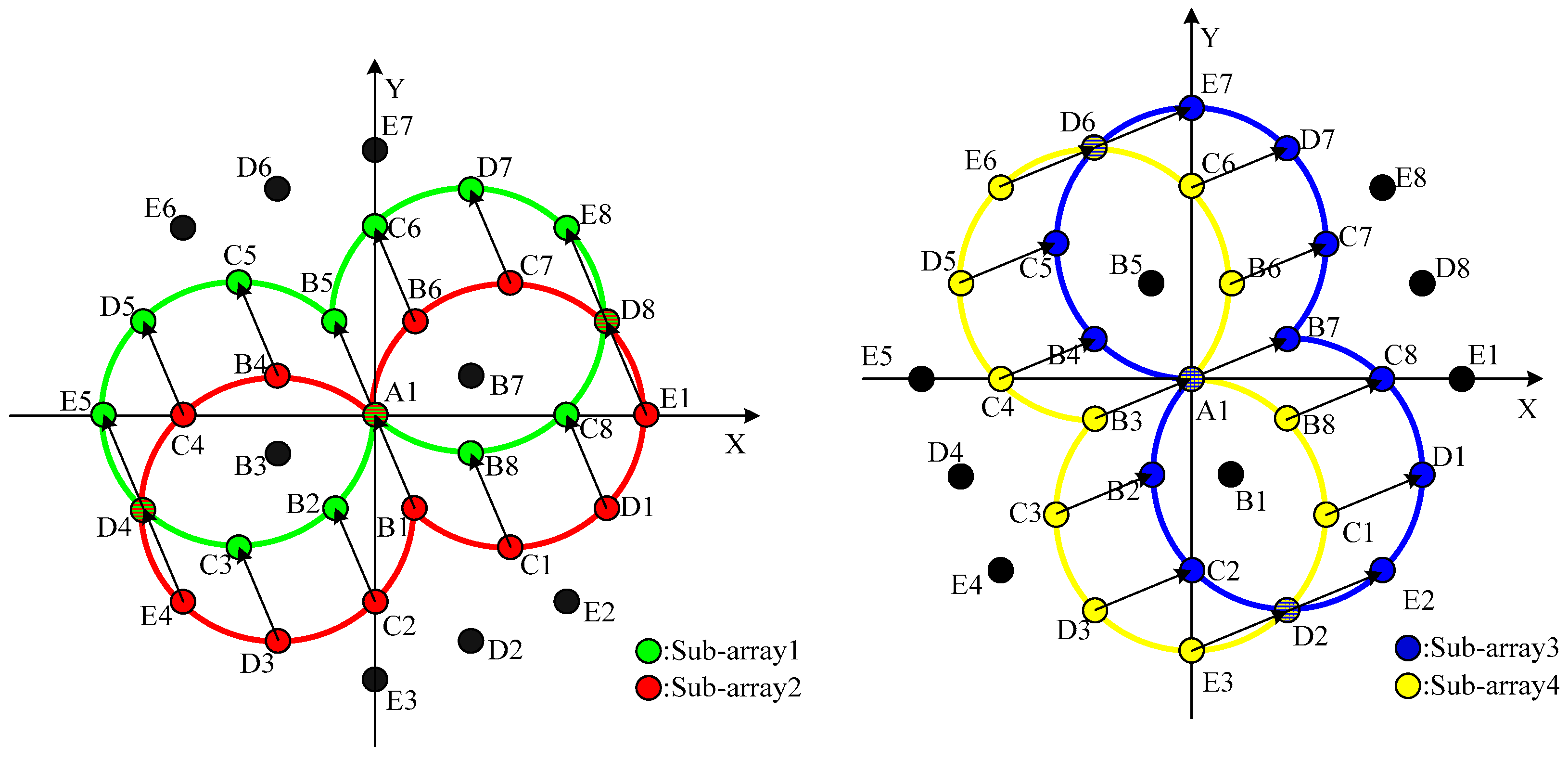
4.1. Selection of Rotational Invariant Sub-Array Pairs
- Pair 1:
- Sub-array 1:A1, B2, B5, B8, C3, C5, C6, C8, D4, D5, D7, D8, E5, E8Sub-array 2:B1, C2, A1, C1, D3, B4, B6, D1, E4, C4, C7, E1, D4, D8
- Pair 2:
- Sub-array 3:A1, B2, B4, B7, C2, C5, C7, C8, D1, D2, D6, D7, E2, E7Sub-array 4:B3, C3, C4, A1, D3, D5, B6, B8, C1, E3, E6, C6, D2, D6
4.2. Two-Dimensional DOA Estimation
4.3. Polarization Estimation
4.4. Pair Matching
4.5. Steps of the Proposed Algorithm
- Step 1:
- Construct the fourth-order cumulant based on Equations (19) and (20).
- Step 2:
- Select two pairs of sub-arrays which display rotational invariance based on the theory introduced in Section 4.1.
- Step 3:
- Construct the rotational invariance matrices , and .
- Step 4:
- Obtain , and based on the total least squares ESPRIT algorithm.
- Step 5:
- Perform pair matching among , and and estimate the DOA and polarization information of the incident signals.
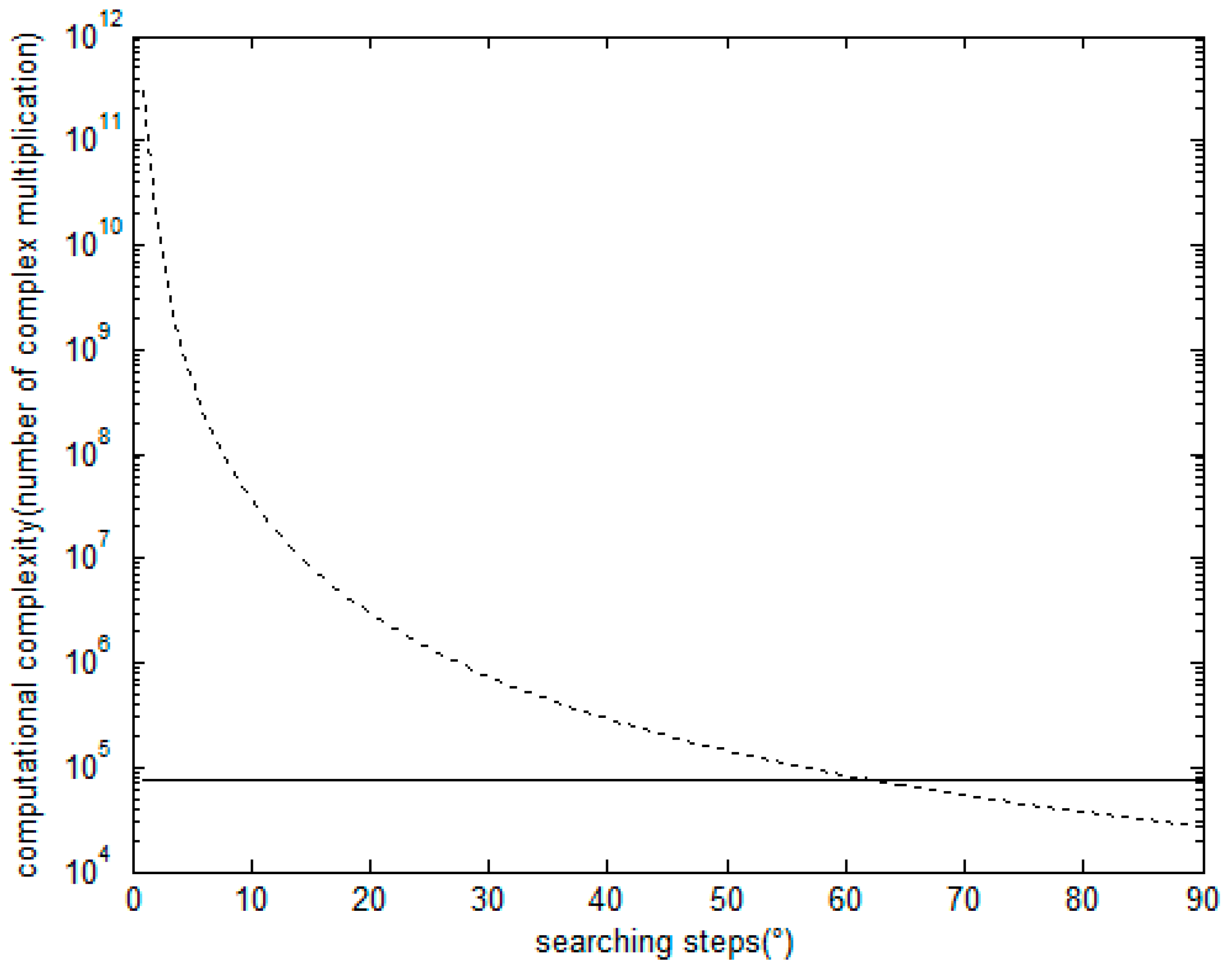
4.6. Computational Complexity
5. Simulation Results
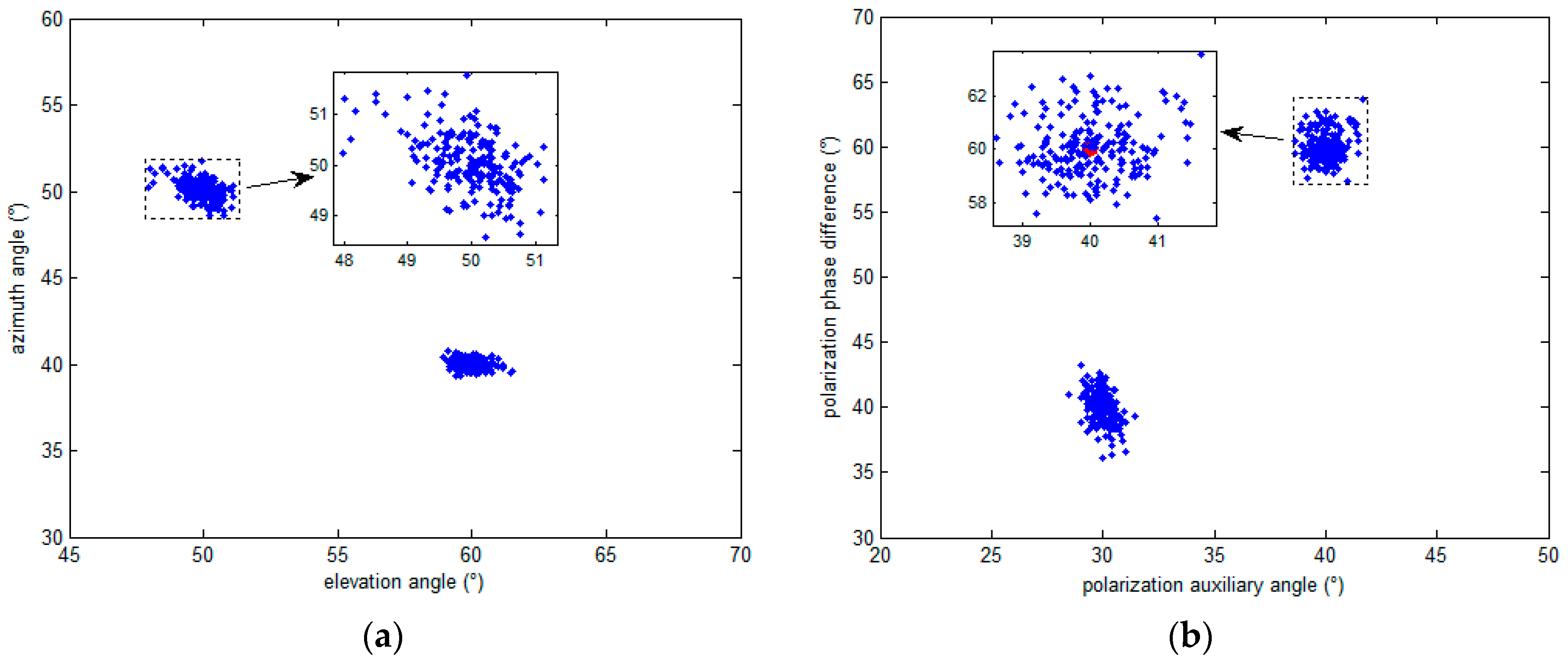
5.1. The Simulation Results Distribution Scatter Diagram of the Proposed Algorithm
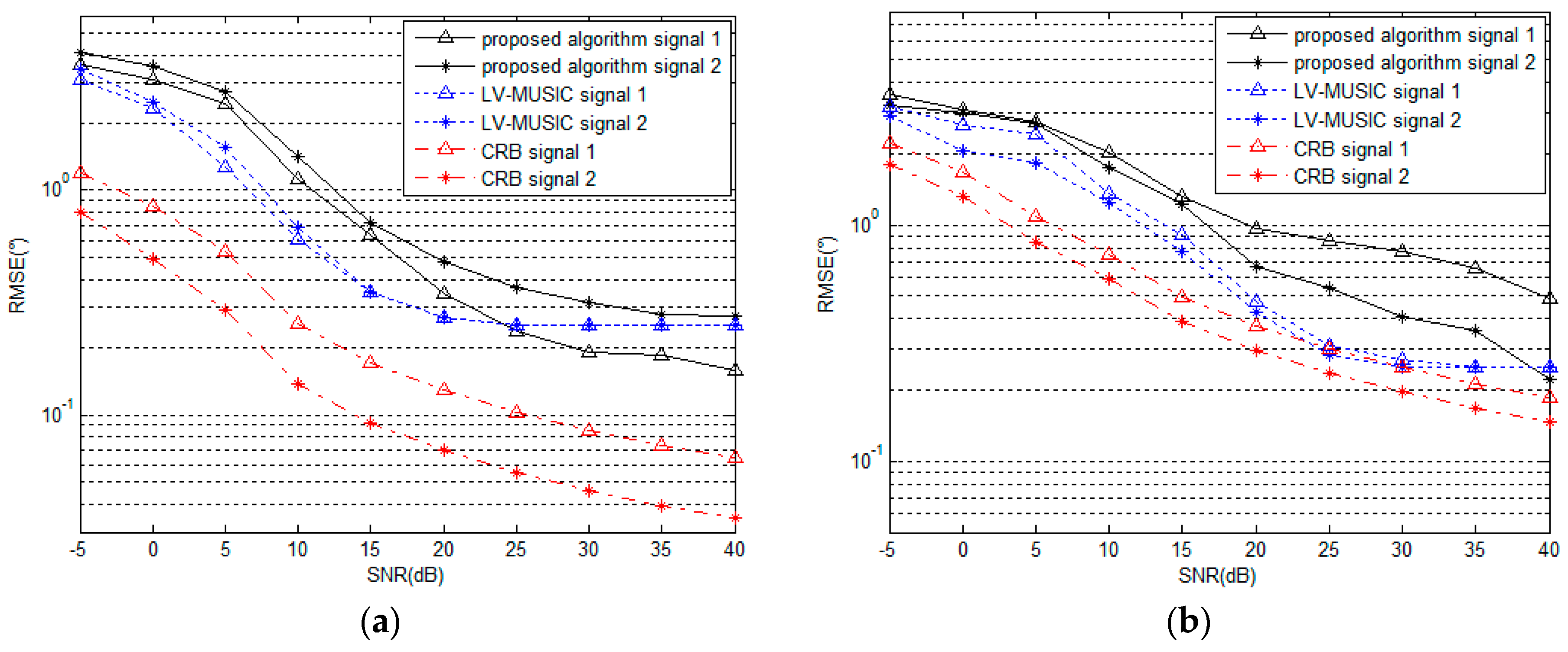
5.2. Performance under Different SNR
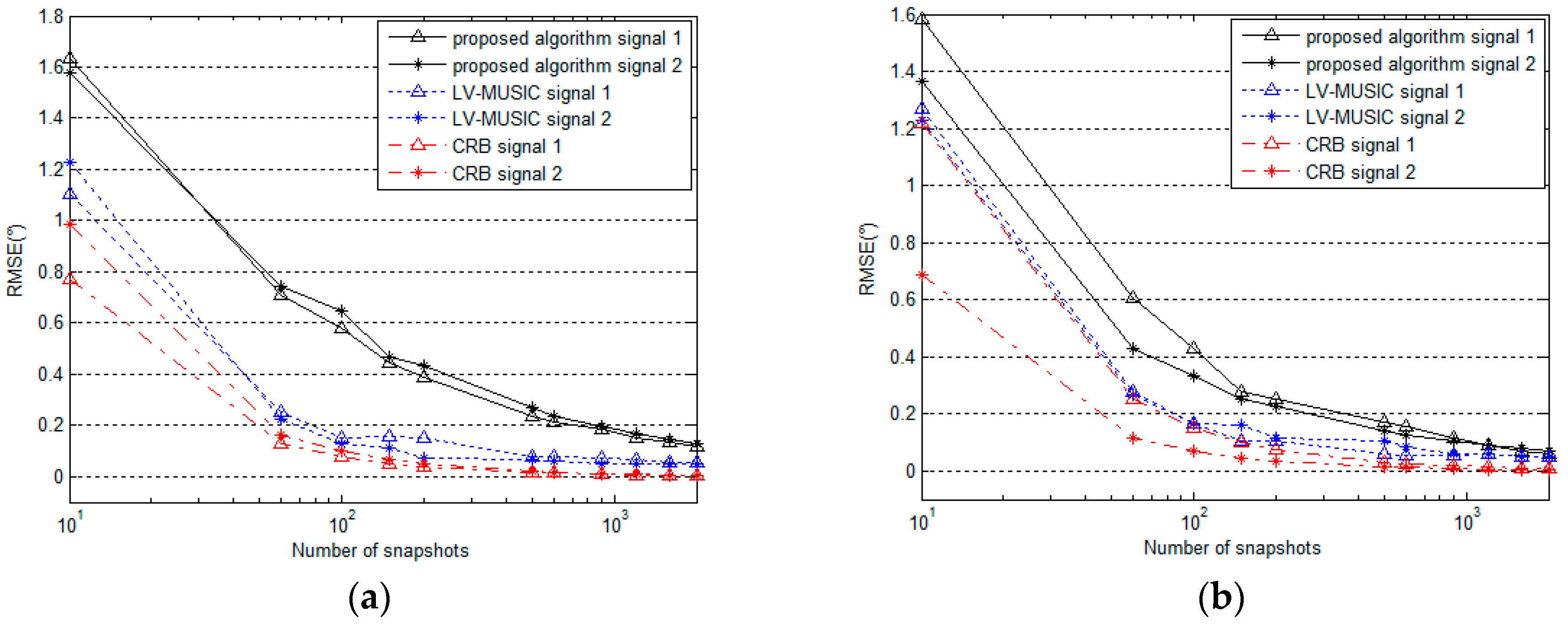
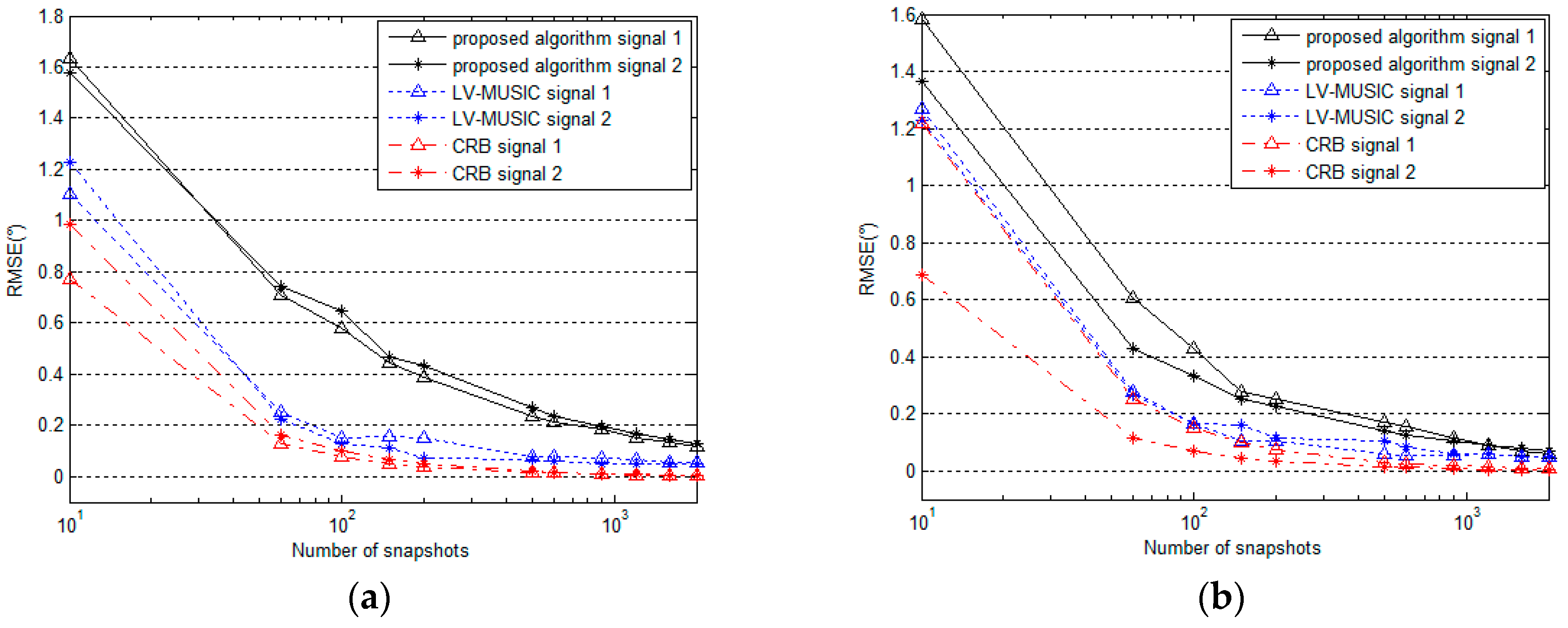
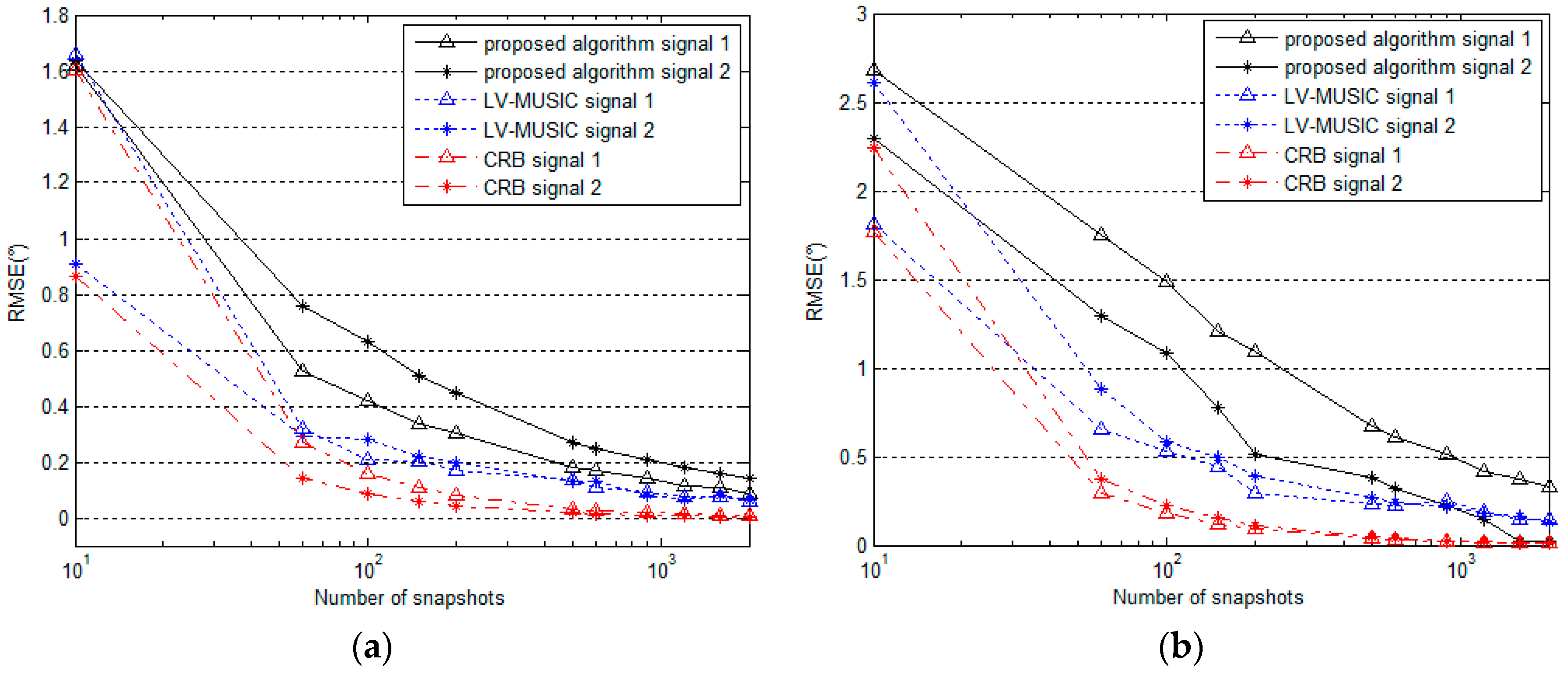
5.3. Performance for Different Numbers of Snapshots
5.4. Running Time
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Wang, Y.; Trinkle, M.; Ng, B.W.H. DOA Estimation under Unknown Mutual Coupling and Multipath with Improved Effective Array Aperture. Sensors 2015, 15, 30856–30869. [Google Scholar] [CrossRef] [PubMed]
- Alinezhad, P.; Seydnejad, S.R.; Abbasi-Moghadam, D. DOA estimation in conformal arrays based on the nested array principles. Digit. Signal Process. 2016, 50, 191–202. [Google Scholar] [CrossRef]
- Zhang, Y.; Xu, X.; Sheikh, Y.A.; Ye, Z. A rank-reduction based 2-D DOA estimation algorithm for three parallel uniform linear arrays. Signal Process. 2016, 120, 305–310. [Google Scholar] [CrossRef]
- Sun, K.; Liu, Y.; Meng, H.; Wang, X. Adaptive sparse representation for source localization with gain/phase errors. Sensors 2011, 11, 4780–4793. [Google Scholar] [CrossRef] [PubMed]
- Yuan, X.; Wong, K.T.; Agrawal, K. Polarization estimation with a dipole-dipole pair, a dipole-loop pair, or a loop-loop pair of various orientations. IEEE Trans. Antennas Propag. 2012, 60, 2442–2452. [Google Scholar] [CrossRef]
- Zhang, X.; Zhou, M.; Li, J. A PARALIND decomposition-based coherent two-dimensional direction of arrival estimation algorithm for acoustic vector-sensor arrays. Sensors 2013, 13, 5302–5316. [Google Scholar] [CrossRef] [PubMed]
- Song, Y.; Yuan, X.; Wong, K.T. Corrections to “Vector Cross-Product Direction-Finding’ With an Electromagnetic Vector-Sensor of Six Orthogonally Oriented But Spatially Noncollocating Dipoles/Loops”. IEEE Trans. Signal Process. 2014, 62, 1028–1030. [Google Scholar] [CrossRef]
- Zheng, G.; Wu, B.; Ma, Y.; Chen, B. Direction of arrival estimation with a sparse uniform array of orthogonally oriented and spatially separated dipole-triads. IET Radar Sonar Navig. 2014, 8, 885–894. [Google Scholar] [CrossRef]
- Wang, K.; He, J.; Shu, T.; Liu, Z. Localization of Mixed Completely and Partially Polarized Signals with Crossed-Dipole Sensor Arrays. Sensors 2015, 15, 31859–31868. [Google Scholar] [CrossRef] [PubMed]
- Han, K.; Nehorai, A. Nested vector-sensor array processing via tensor modeling. IEEE Trans. Signal Process. 2014, 62, 2542–2553. [Google Scholar] [CrossRef]
- Wong, K.T.; Yuan, X. “Vector cross-product direction-finding” with an electromagnetic vector-sensor of six orthogonally oriented but spatially noncollocating dipoles/loops. IEEE Trans. Signal Process. 2011, 59, 160–171. [Google Scholar] [CrossRef]
- Wang, X.; Wang, W.; Li, X.; Liu, J. Real-Valued Covariance Vector Sparsity-Inducing DOA Estimation for Monostatic MIMO Radar. Sensors 2015, 15, 28271–28286. [Google Scholar] [CrossRef] [PubMed]
- Guo, W.; Yang, M.; Chen, B.; Zheng, G. Joint DOA and polarization estimation using MUSIC method in polarimetric MIMO radar. In Proceedings of the IET International Conference on Radar Systems (Radar 2012), Glasgow, UK, 22–25 October 2012.
- Gaber, A.; Omar, A. A Study of Wireless Indoor Positioning Based on Joint TDOA and DOA Estimation Using 2-D Matrix Pencil Algorithms and IEEE 802.11 ac. IEEE Trans. Wirel. Commun. 2015, 14, 2440–2454. [Google Scholar] [CrossRef]
- Abdi, A.; Guo, H. Signal correlation modeling in acoustic vector sensor arrays. IEEE Trans. Signal Process. 2009, 57, 892–903. [Google Scholar] [CrossRef]
- Hawkes, M.; Nehorai, A. Wideband source localization using a distributed acoustic vector-sensor array. IEEE Trans. Signal Process. 2003, 51, 1479–1491. [Google Scholar] [CrossRef]
- Zhang, X.; Chen, C.; Li, J.; Xu, D. Blind DOA and polarization estimation for polarization-sensitive array using dimension reduction music. Multidimens. Syst. Signal Process. 2014, 25, 67–82. [Google Scholar] [CrossRef]
- Wong, K.T.; Zoltowski, M.D. Self-initiating music-based direction finding and polarization estimation in spatio-polarizational beamspace. IEEE Trans. Antennas Propag. 2000, 48, 1235–1245. [Google Scholar]
- Zoltowski, M.D.; Wong, K.T. ESPRIT-based 2-D direction finding with a sparse uniform array of electromagnetic vector sensors. IEEE Trans. Signal Process. 2000, 48, 2195–2204. [Google Scholar] [CrossRef]
- Li, J.; Compton, R.T., Jr. Angle estimation using a polarization sensitive array. IEEE Trans. Antennas Propag. 1991, 39, 1539–1543. [Google Scholar] [CrossRef]
- Li, J.; Compton, R.T., Jr. Angle and polarization estimation using ESPRIT with a polarization sensitive array. IEEE Trans. Antennas Propag. 1991, 39, 1376–1383. [Google Scholar] [CrossRef]
- Li, J. On polarization estimation using a polarization sensitive array. In Proceedings of the IEEE Sixth SP Workshop on Statistical Signal and Array Processing, Victoria, BC, Canada, 7–9 October 1992.
- Zoltowski, M.D.; Wong, K.T. Closed-form eigenstructure-based direction finding using arbitrary but identical sub arrays on a sparse uniform Cartesian array grid. IEEE Trans. Signal Process. 2000, 48, 2205–2210. [Google Scholar] [CrossRef]
- Hua, Y. A pencil-MUSIC algorithm for finding two-dimensional angles and polarizations using crossed dipoles. IEEE Trans. Antennas Propag. 1993, 41, 370–376. [Google Scholar] [CrossRef]
- Cheng, Q.; Hua, Y. Performance analysis of the MUSIC and pencil-MUSIC algorithms for diversely polarized array. IEEE Trans. Signal Process. 1994, 42, 3150–3165. [Google Scholar] [CrossRef]
- Wong, K.T.; Li, L.; Zoltowski, M.D. Root-music-based direction-finding and polarization estimation using diversely polarized possibly collocated antennas. IEEE Antennas Wirel. Propag. Lett. 2004, 3, 129–132. [Google Scholar]
- Zhang, F. Quaternions and matrices of quaternions. Linear Algebra Its Appl. 1997, 251, 21–57. [Google Scholar] [CrossRef]
- Gsponer, A.; Hurni, J.P. Quaternions in mathematical physics (1): Alphabetical bibliography. arXiv, 2005; arXiv:preprint math-ph/0510059. [Google Scholar]
- Lam, T.Y.; Leep, D.B.; Tignol, J.P. Biquaternion algebras and quartic extensions. Publ. Math. L'IHÉS 1993, 77, 63–102. [Google Scholar] [CrossRef]
- Muti, D.; Bourennane, S. Multidimensional filtering based on a tensor approach. Signal Process. 2005, 85, 2338–2353. [Google Scholar] [CrossRef]
- Miron, S.; Le Bihan, N.; Mars, J.I. Quaternion-MUSIC for vector-sensor array processing. IEEE Trans. Signal Process. 2006, 54, 1218–1229. [Google Scholar] [CrossRef]
- Gou, X.; Liu, Z.; Xu, Y. Biquaternion cumulant-MUSIC for DOA estimation of noncircular signals. Signal Process. 2013, 93, 874–881. [Google Scholar] [CrossRef]
- Le Bihan, N.; Miron, S.; Mars, J.I. MUSIC algorithm for vector-sensors array using biquaternions. IEEE Trans. Signal Process. 2007, 55, 4523–4533. [Google Scholar] [CrossRef]
- Gong, X.; Liu, Z.; Xu, Y. Quad-quaternion MUSIC for DOA estimation using electromagnetic vector sensors. EURASIP J. Adv. Signal Process. 2008, 2008, 204. [Google Scholar] [CrossRef]
- Boizard, M.; Ginolhac, G.; Pascal, F.; Miron, S.; Forster, P. Numerical performance of a tensor music algorithm based on HOSVD for a mixture of polarized sources. In Proceedings of the IEEE 21st European Signal Processing Conference (EUSIPCO 2013), Marrakech, Morocco, 9–13 September 2013.
- Wang, L.; Zou, M.; Wang, G.; Chen, Z. Direction finding and information detection algorithm with an L-shaped CCD array. IETE Tech. Rev. 2015, 32, 114–122. [Google Scholar] [CrossRef]
- Roemer, F.; Haardt, M.; Del Galdo, G. Analytical performance assessment of multi-dimensional matrix-and tensor-based ESPRIT-type algorithms. IEEE Trans. Signal Process. 2014, 62, 2611–2625. [Google Scholar]
- Kikuchi, S.; Tsuji, H.; Sano, A. Pair-matching method for estimating 2-D angle of arrival with a cross-correlation matrix. IEEE Antennas Wirel. Propag. Lett. 2006, 5, 35–40. [Google Scholar] [CrossRef]
- Yoo, D.S. Subspace-based DOA estimation with sliding signal-vector construction for ULA. Electron. Lett. 2015, 51, 1361–1363. [Google Scholar] [CrossRef]
- Ren, S.; Ma, X.; Yan, S.; Hao, C. 2-D unitary ESPRIT-like direction-of-arrival (DOA) estimation for coherent signals with a uniform rectangular array. Sensors 2013, 13, 4272–4288. [Google Scholar] [CrossRef] [PubMed]
- Wu, H.; Hou, C.; Chen, H.; Liu, W.; Wang, Q. Direction finding and mutual coupling estimation for uniform rectangular arrays. Signal Process. 2015, 117, 61–68. [Google Scholar] [CrossRef]
- Gu, J.F.; Zhu, W.P.; Swamy, M.N.S. Joint 2-D DOA estimation via sparse L-shaped array. IEEE Trans. Signal Process. 2015, 63, 1171–1182. [Google Scholar] [CrossRef]
- Lin, M.; Yang, L. Blind calibration and DOA estimation with uniform circular arrays in the presence of mutual coupling. IEEE Antennas Wirel. Propag. Lett. 2006, 5, 315–318. [Google Scholar] [CrossRef]
- See, C.M.S.; Nehorai, A. Source localization with distributed electromagnetic component sensor array processing. ISSPA 2003, 1, 177–180. [Google Scholar]
- Wu, N.; Qu, Z.; Si, W.; Jiao, S. Joint estimation of DOA and polarization based on phase difference analysis of electromagnetic vector sensor array. Multidimens. Syst. Signal Process. 2016. [Google Scholar] [CrossRef]
- Wang, Q.; Chen, H.; Zhao, G.; Chen, B.; Wang, P. An Improved Direction Finding Algorithm Based on Toeplitz Approximation. Sensors 2013, 13, 746–757. [Google Scholar] [CrossRef] [PubMed]
- Goossens, R.; Rogier, H. Direction-of-arrival and polarization estimation with uniform circular arrays in the presence of mutual coupling. AEUInt. J. Electron. Commun. 2008, 62, 199–206. [Google Scholar] [CrossRef]
- Goossens, R.; Rogier, H. Estimation of direction-of-arrival and polarization with diversely polarized antennas in a circular symmetry incorporating mutual coupling effects. In Proceedings of the IEEE 2006 First European Conference on Antennas and Propagation, Nice, France, 6–10 November 2006.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sub-Array 1 | Element of | Sub-Array 2 | Element of | Sub-Array 3 | Element of | Sub-Array 4 | Element of |
|---|---|---|---|---|---|---|---|
| A1 | B1 | A1 | B3 | ||||
| B2 | C2 | B2 | C3 | ||||
| B5 | A1 | B4 | C4 | ||||
| B8 | C1 | B7 | A1 | ||||
| C3 | D3 | C2 | D3 | ||||
| C5 | B4 | C5 | D5 | ||||
| C6 | B6 | C7 | B6 | ||||
| C8 | D1 | C8 | B8 | ||||
| D4 | E4 | D1 | C1 | ||||
| D5 | C4 | D2 | E3 | ||||
| D7 | C7 | D6 | E6 | ||||
| D8 | E1 | D7 | C6 | ||||
| E5 | D4 | E2 | D2 | ||||
| E8 | D8 | E7 | D6 |
| Algorithm | Time (s) |
|---|---|
| LV-MUSIC(two dimensional searching) | 4.8942 |
| Proposed Algorithm | 3.7952 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, N.; Qu, Z.; Si, W.; Jiao, S. DOA and Polarization Estimation Using an Electromagnetic Vector Sensor Uniform Circular Array Based on the ESPRIT Algorithm. Sensors 2016, 16, 2109. https://doi.org/10.3390/s16122109
Wu N, Qu Z, Si W, Jiao S. DOA and Polarization Estimation Using an Electromagnetic Vector Sensor Uniform Circular Array Based on the ESPRIT Algorithm. Sensors. 2016; 16(12):2109. https://doi.org/10.3390/s16122109
Chicago/Turabian StyleWu, Na, Zhiyu Qu, Weijian Si, and Shuhong Jiao. 2016. "DOA and Polarization Estimation Using an Electromagnetic Vector Sensor Uniform Circular Array Based on the ESPRIT Algorithm" Sensors 16, no. 12: 2109. https://doi.org/10.3390/s16122109