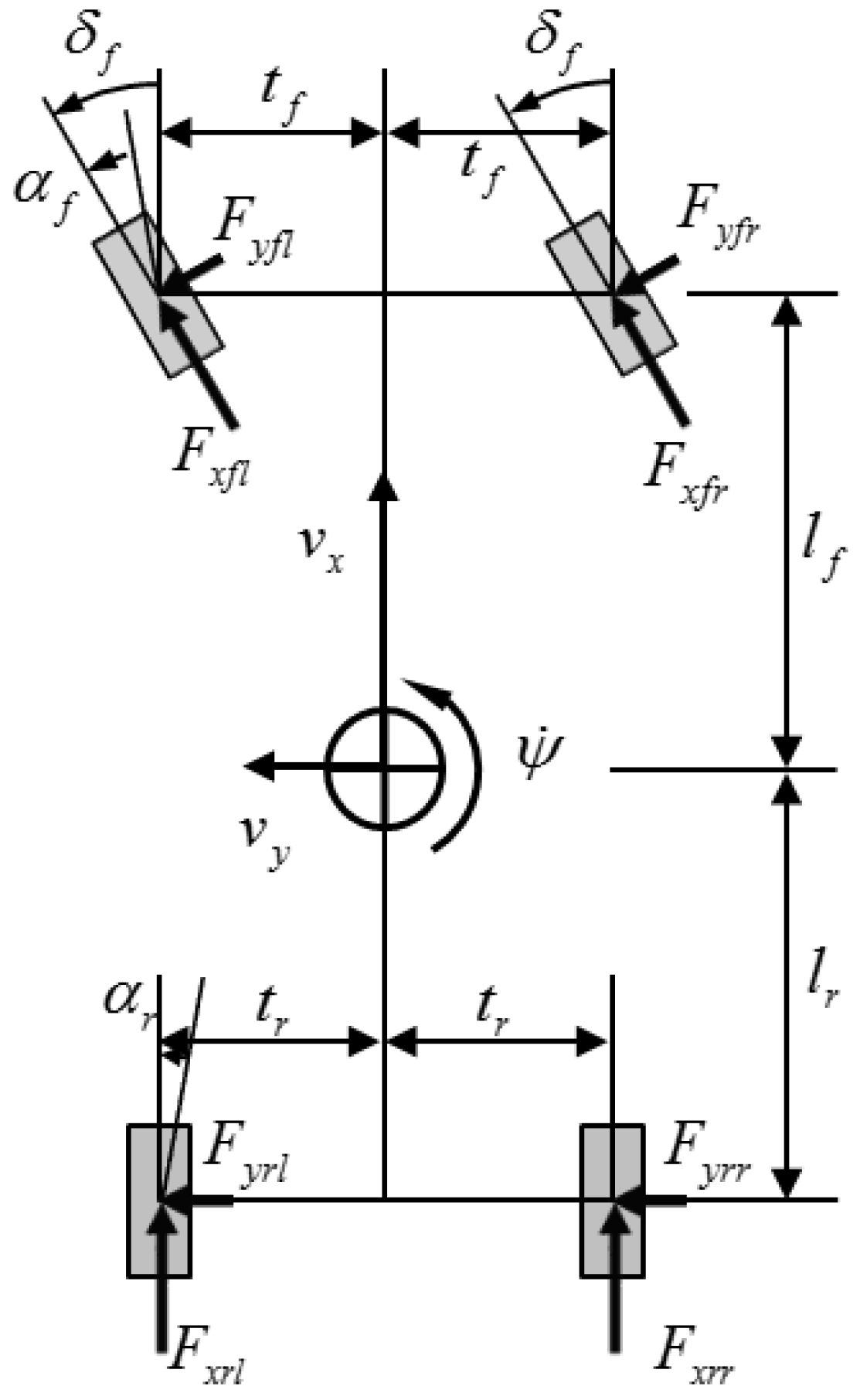
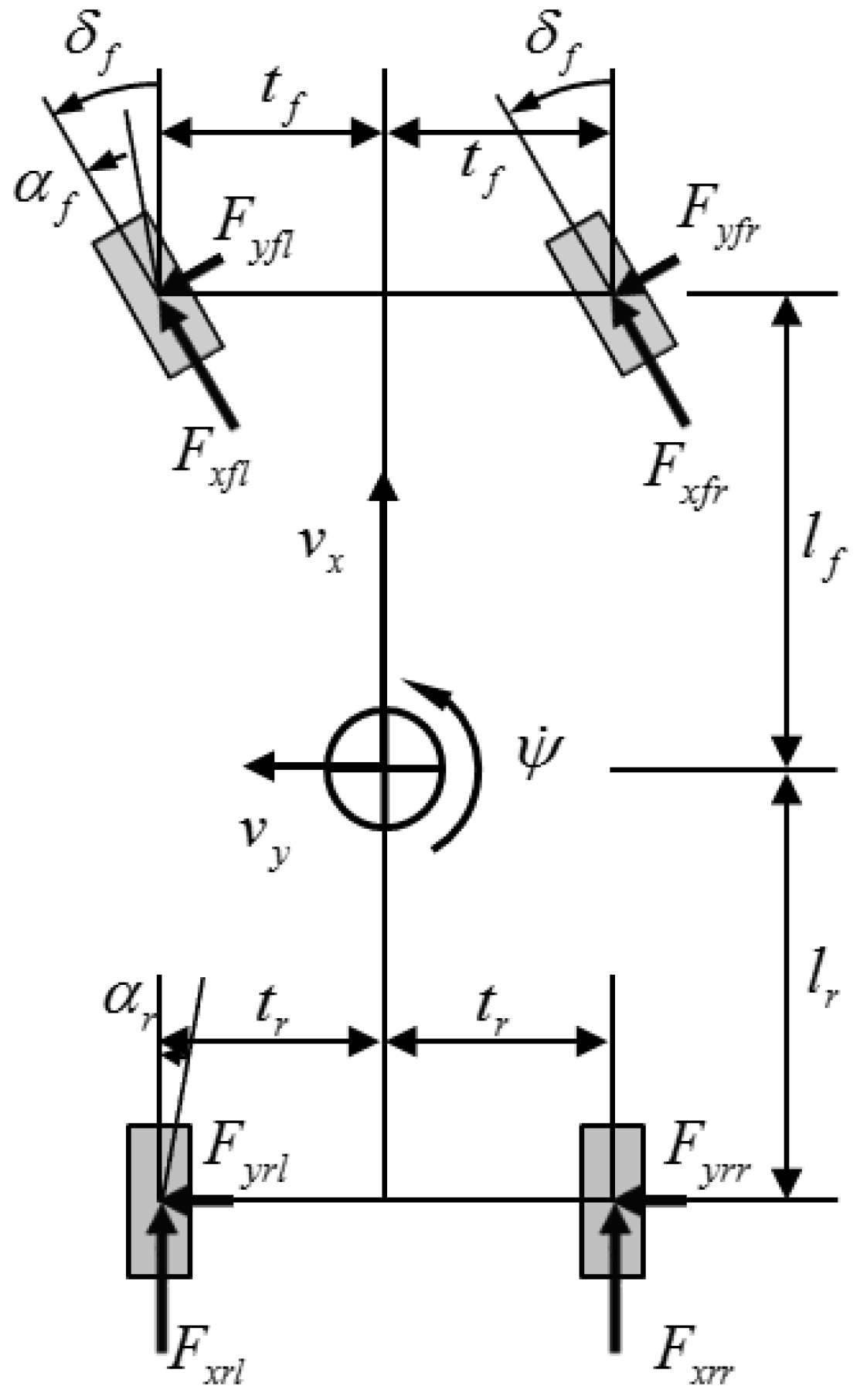
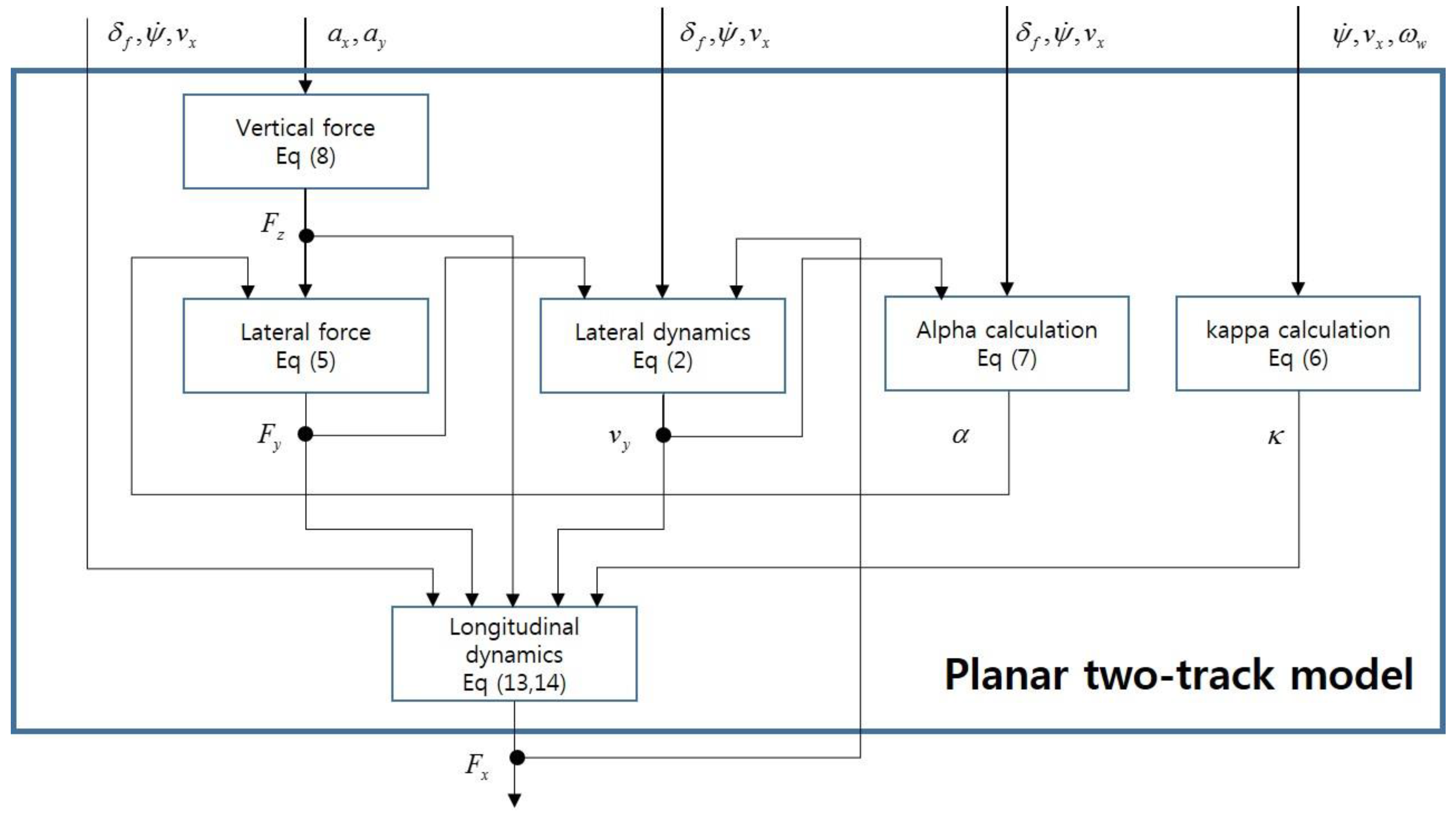
For the high-level fault diagnosis of the vehicle dynamics, a planar two-track non-linear model, which can realize the longitudinal and lateral forces in each wheel, is used considering the characteristics of the in-wheel system that each wheel drives independently. By analyzing the influence of the drive motor fault on the entire vehicle, a correlation between each sensor and the realized residual is derived.
2.2. Non-Linear Simple Tire Model
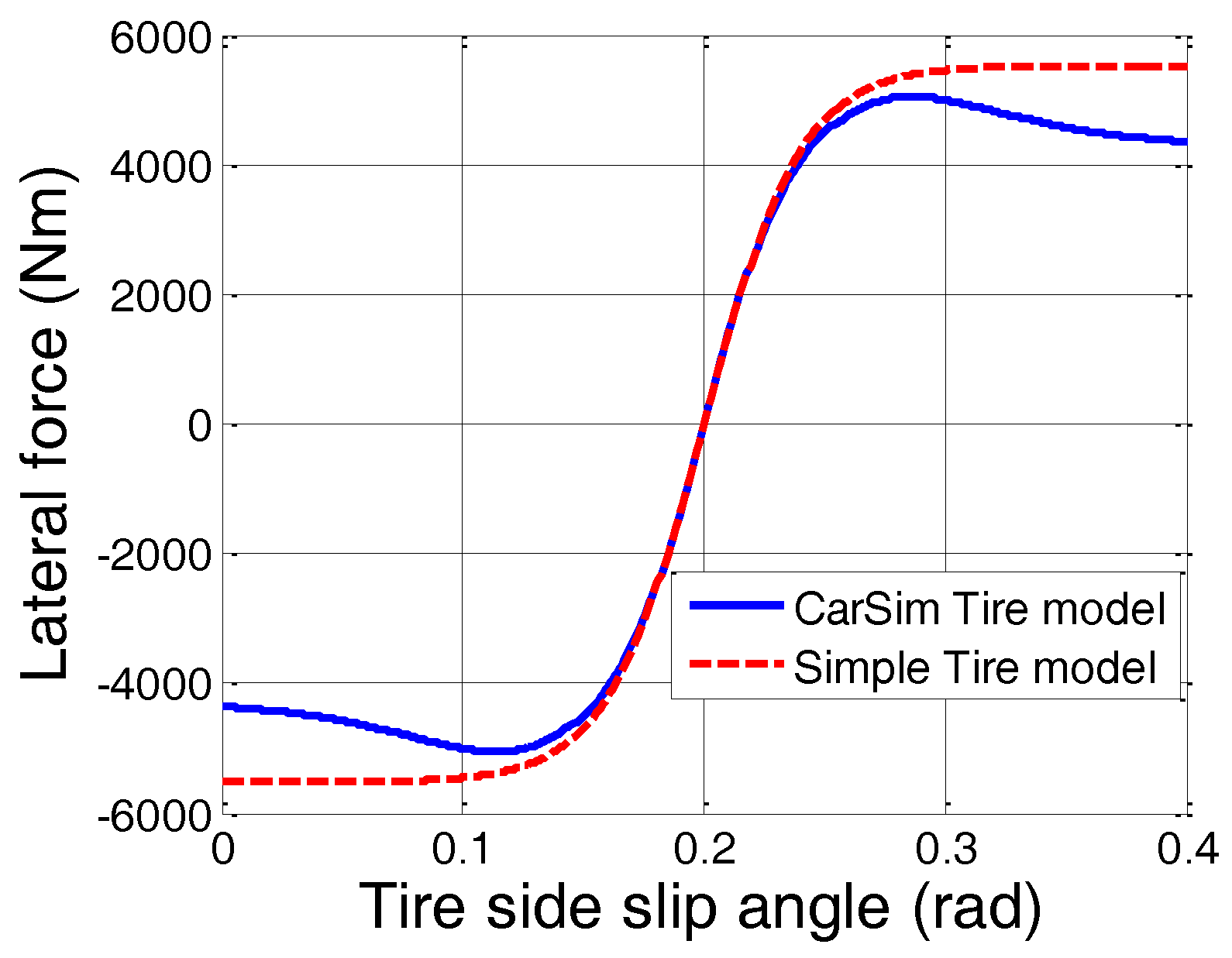
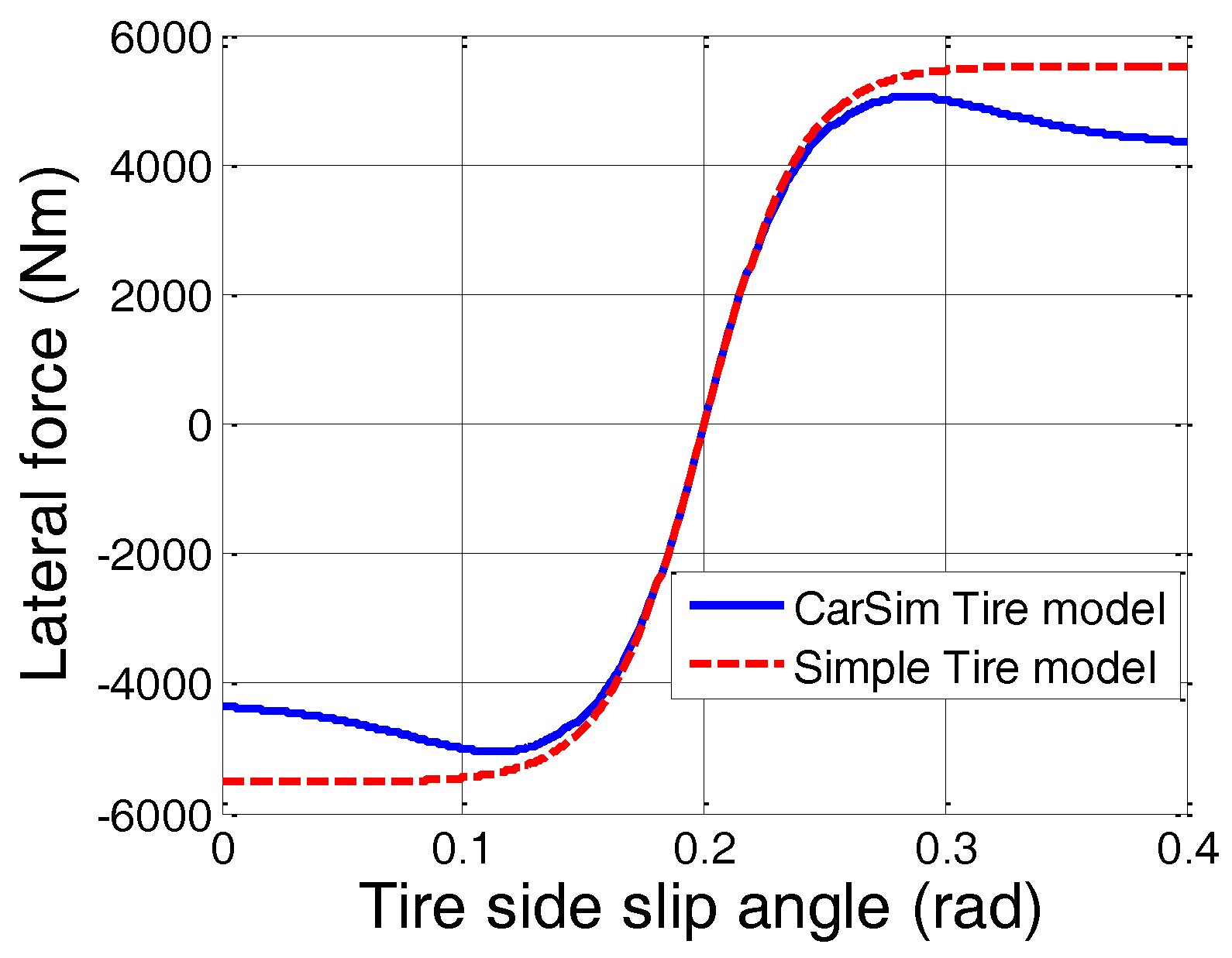
In this study, to calculate the longitudinal and lateral forces of the two-track model, the linear and non-linear intervals are simulated to be as close as possible to the actual condition while using the non-linear simple tire model, which is relatively easy to tune. The non-linear simple tire model is realized using the hyperbolic tangent function, and the mathematical equations describing the longitudinal and lateral forces are expressed as follows:
where
and
refer to the tuning factors whereas
and
refer to the longitudinal slip and tire-side slip angle, respectively.
The longitudinal slip and tire-side slip angle for each wheel are expressed as follows [
34]:
where
is the wheel velocity.
In addition, vertical force
is obtained using weight transfer, which is calculated using the longitudinal and lateral accelerations. The results are expressed as follows [
34]:
where
is the vehicle sprung mass,
is the wheel base,
is the sprung mass height,
is the vehicle tread,
is the longitudinal acceleration,
is the lateral acceleration,
is the lateral weight-shift distribution on the front wheel, and
is the lateral weight-shift distribution on the rear wheel.
Figure 2 shows the comparison of the CarSim and simple tire models described in Equation (5). CarSim is a commercially available simulation tool that predicts the performance of vehicles in response to driver controls in a given environment [
35,
36,
37].
2.5. Longitudinal Force Estimation
When Equation (10) is examined in terms of the residual, , which is calculated from the model, is used. However, in the linear interval of , the gradient differs depending on the terrain type. Therefore, calculation of an exact value is difficult. Hence, using the longitudinal dynamics and the non-linear simple tire model, gradient coefficient in the linear interval of can be estimated to calculate more accurately.
Henceforth, we assume that the signs of the longitudinal slips of each wheel while driving are the same and that the longitudinal force is larger than the lateral force.
The expanded longitudinal dynamics without considering lateral force is expressed as follows:
Using the non-linear simple tire model, expanded
in Equation (11) can be expressed as follows:
In the linear interval of
, gradient coefficient
can be expressed as follows by rearranging the terms in Equation (12):
With
, a more accurate longitudinal force can be estimated to increase the accuracy of the residual fault diagnosis. Hence, the longitudinal force can be written as
2.6. Analysis of the Correlation between Each Sensor and the Residual
To configure the fault-diagnosis algorithm and to confirm the possibility of fault separation, the correlation between each sensor and residual needs to be analyzed.
The sensor information used for estimating the longitudinal force is expressed as follows:
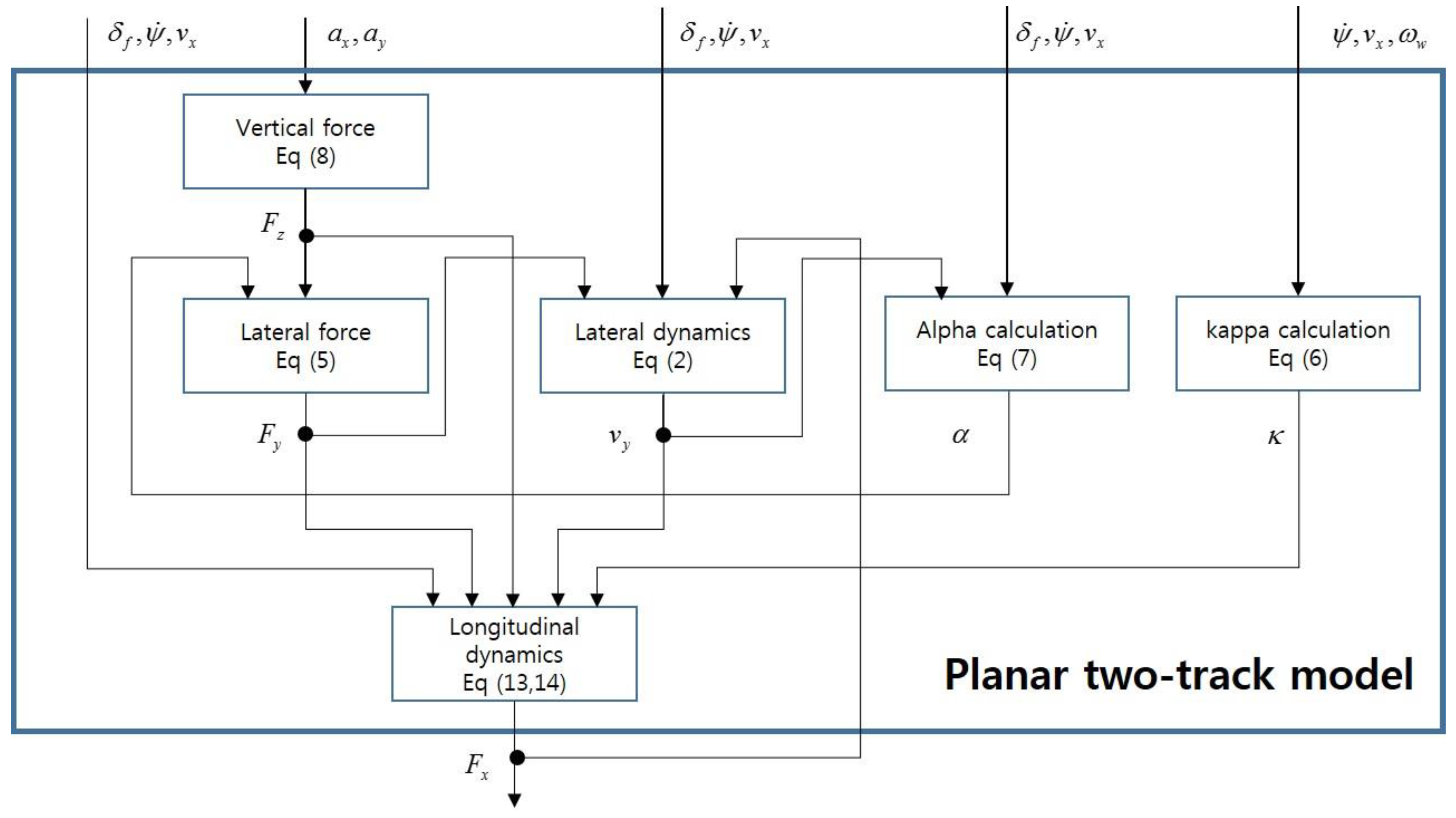
Equation (15) indicates that is obtained using sensor signals , , , , , and .
in Equation (15) can be obtained using Equations (2) and (5), whereas
can be obtained using Equation (8), i.e.,
Finally, the correlation between each sensor and the residual can be expressed as follows using Equation (10):
Figure 3 shows the correlation between each sensor and the residual.
The residuals obtained from Equation (19) and
Figure 3 can be independently configured for each wheel and are listed as follows
Table 1.
The term “X” in
Table 1 refers to the correlation between the residual
and each sensor. In other words, by assuming that the other sensor information is normal, the fault of the drive motor
in each wheel can be detected and separated. If dynamic sensors such as the yaw-rate, longitudinal and lateral acceleration, and wheel-speed sensors, fail, the residual
cannot diagnose the motor sensor fault. Therefore, for the fault separation in the other sensors, fault residual redundancy is required. In this study, Equations (2), (3) and (5) are used to add the residuals of
and
while obtaining the residual of
using the Global Positioning System (GPS). In addition, using Equation (4), the residual of the longitudinal force can be substituted.
In order to isolate motor sensor faults and vehicle dynamics sensor faults, additional residuals should not be affected by the fault of the drive motor . Therefore, it is necessary to separate the vehicle dynamics sensor faults using a linear model instead of a complex model.
Using the linear bicycle model [
38], the estimations of
and
can be expressed as follows:
where
and
are cornering stiffness (
).
Using Equation (20), the residual can be substituted as follows:
Using the acceleration sensor dynamics [
39] and Equation (20), the residual can be substituted as follows:
The equation substituted by the residual of
using GPS is expressed as follows:
In order to distinguish between wheel sensor failure and motor failure, the additional residual is configured as wheel dynamics only.
Assuming
is a known value, Equation (4) can be expressed as
In addition, Equation (25) can also be substituted by the residuals using Equation (19), as shown below.
When the residuals derived from the above are summarized, were diagnosed using a planar two-track model to detect the failure of each wheel motor. were diagnosed using a linear bicycle model to diagnose vehicle dynamics failure without being affected by motor failure. are additional residuals that are used to separate the wheel sensor and motor fault.
Residuals that are newly added to the list in
Table 1 are listed in
Table 2.
Table 2 confirms that the other sensors are also capable of separating the faults using additional residuals.
2.7. Adaptive Threshold
The vehicle and tire models used in the present study show behavior similar to that of actual models in a normal state. However, in a transient state, the inaccuracy of the models increases. Therefore, the value of the residual, which is designed by including the inaccuracy, can be different from zero even when no fault exists. Such residual deviation is influenced by the intensity of the input signal and frequency. Therefore, to realize a fault-diagnosis algorithm that is robust against model inaccuracy, the method of adaptive threshold is used.
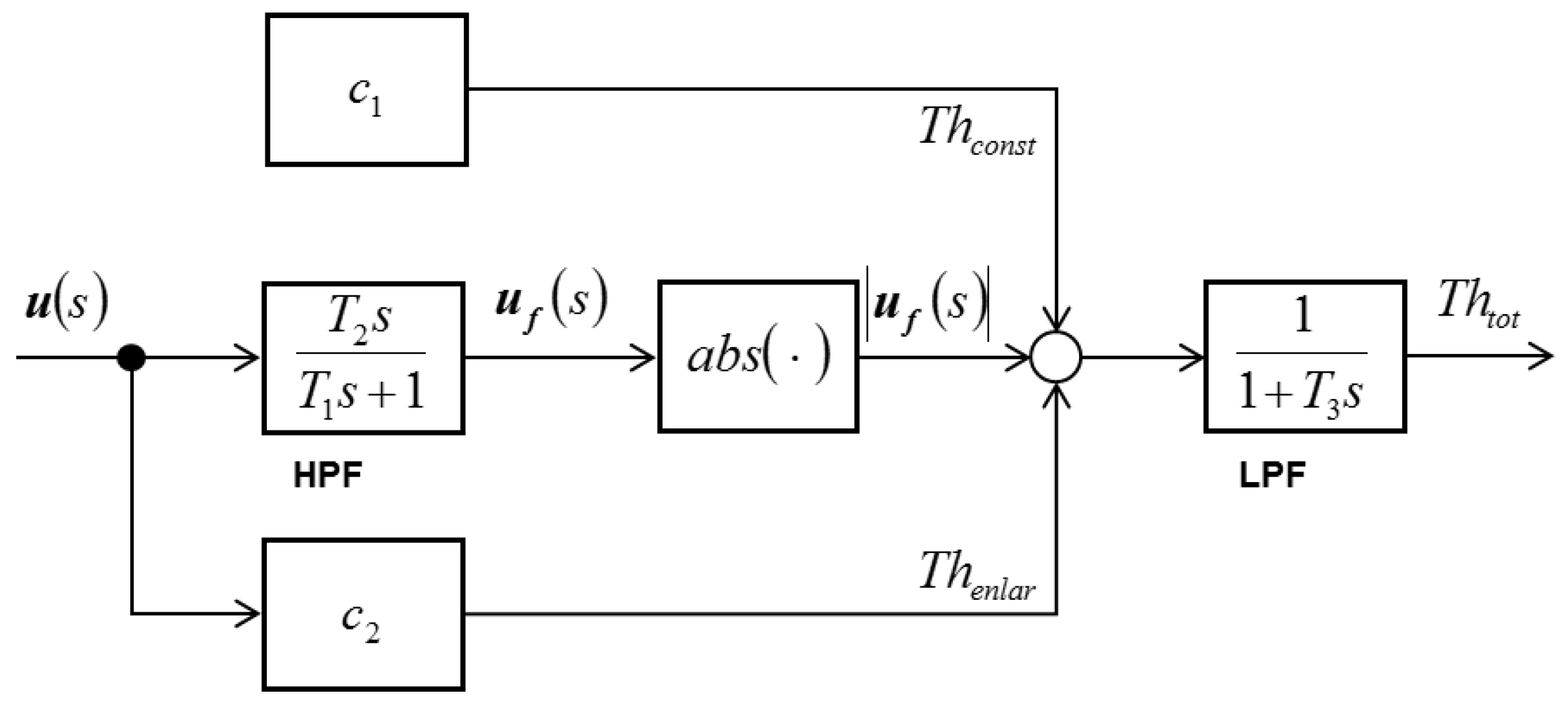
Figure 4 shows the generation of adaptive threshold values according to the input value [
40].
The fault-diagnosis algorithm uses vehicle models that do not fully correspond with the real processes due to model uncertainties. The generated residual then deviates from zero even without a fault. If the threshold is not well set, it may generate false alarms through normal fluctuations of the variable. Obviously, setting
too high reduces the sensitivity to faults, and setting
too low increases the false alarm rate. Usually,
is empirically set by considering the maximum influence of the model uncertainties. In particular, in the transient state, these model uncertainties more frequently occur. Therefore, adaptive threshold is introduced to avoid these problems. The deviation in the residual depends on the amplitude and frequencies of the input excitation. The adaptive threshold method uses its variation. It uses a high-pass filter to enlarge the threshold (where the deviation and amplitude of the input have an effect) and a low-pass filter to smoothen the threshold, as shown in
Figure 3. Time constants
and
are selected according to the dominant time constant of the system process.
depends on the model uncertainty of the dynamics [
40].
2.8. Simulation Result
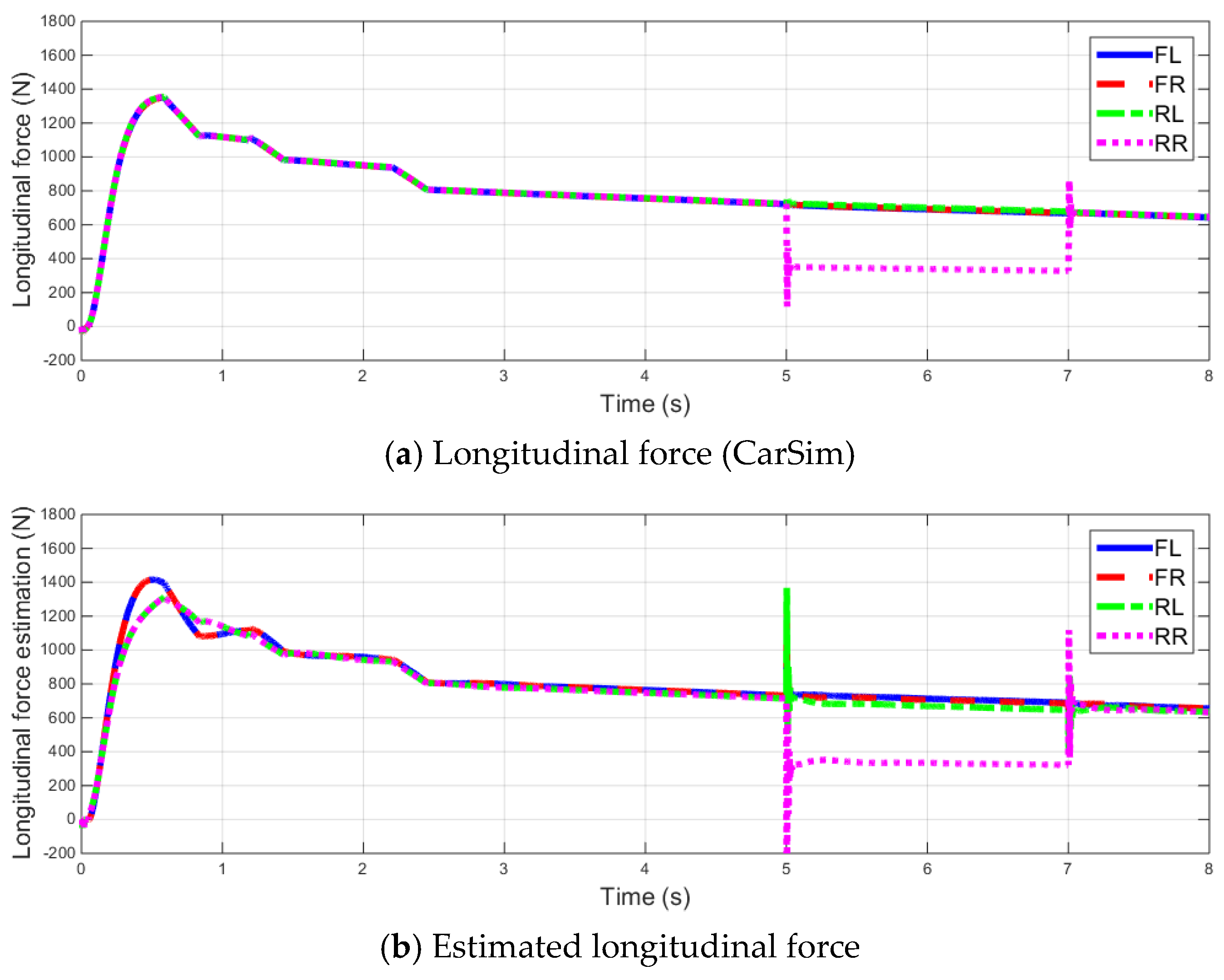
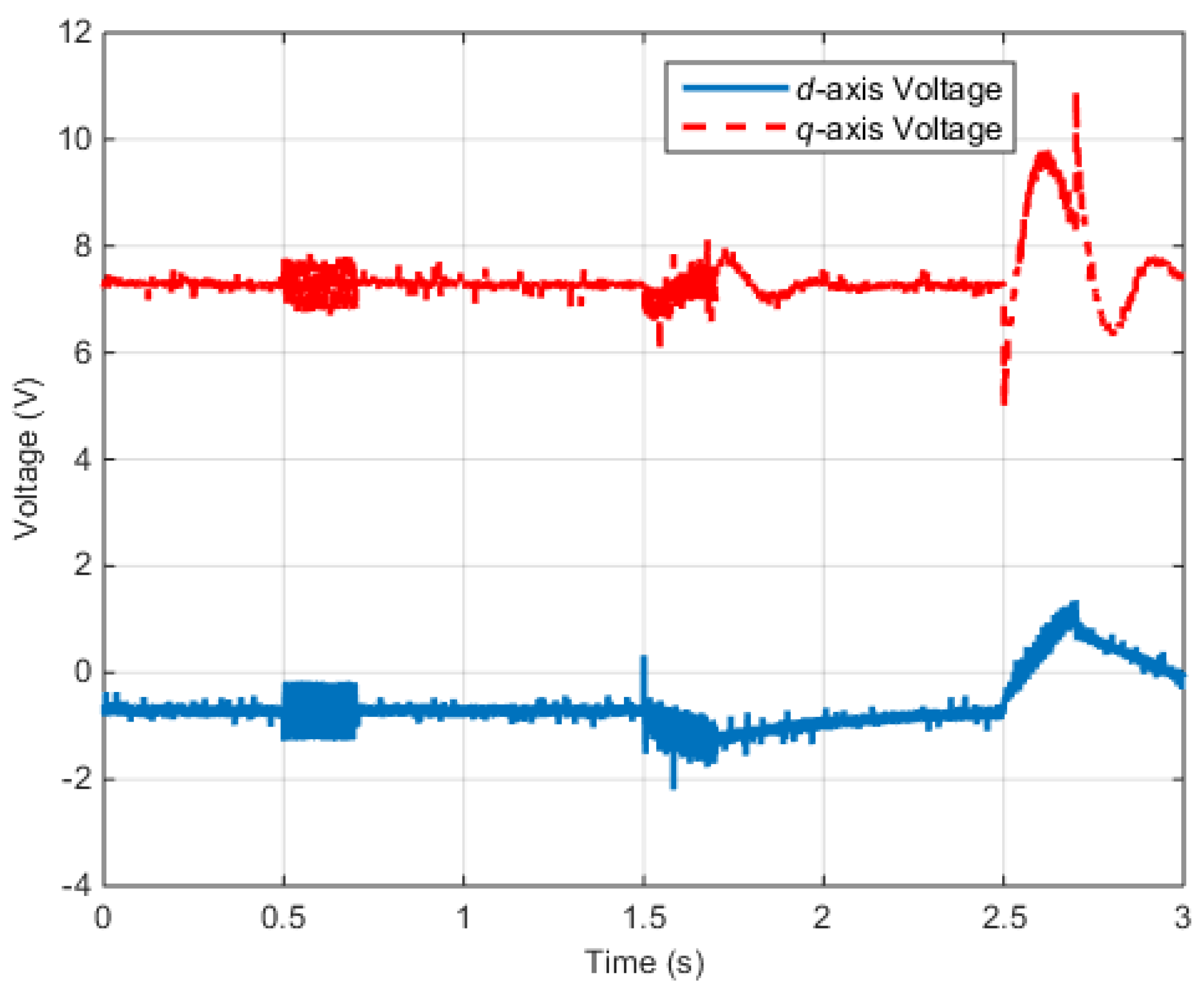
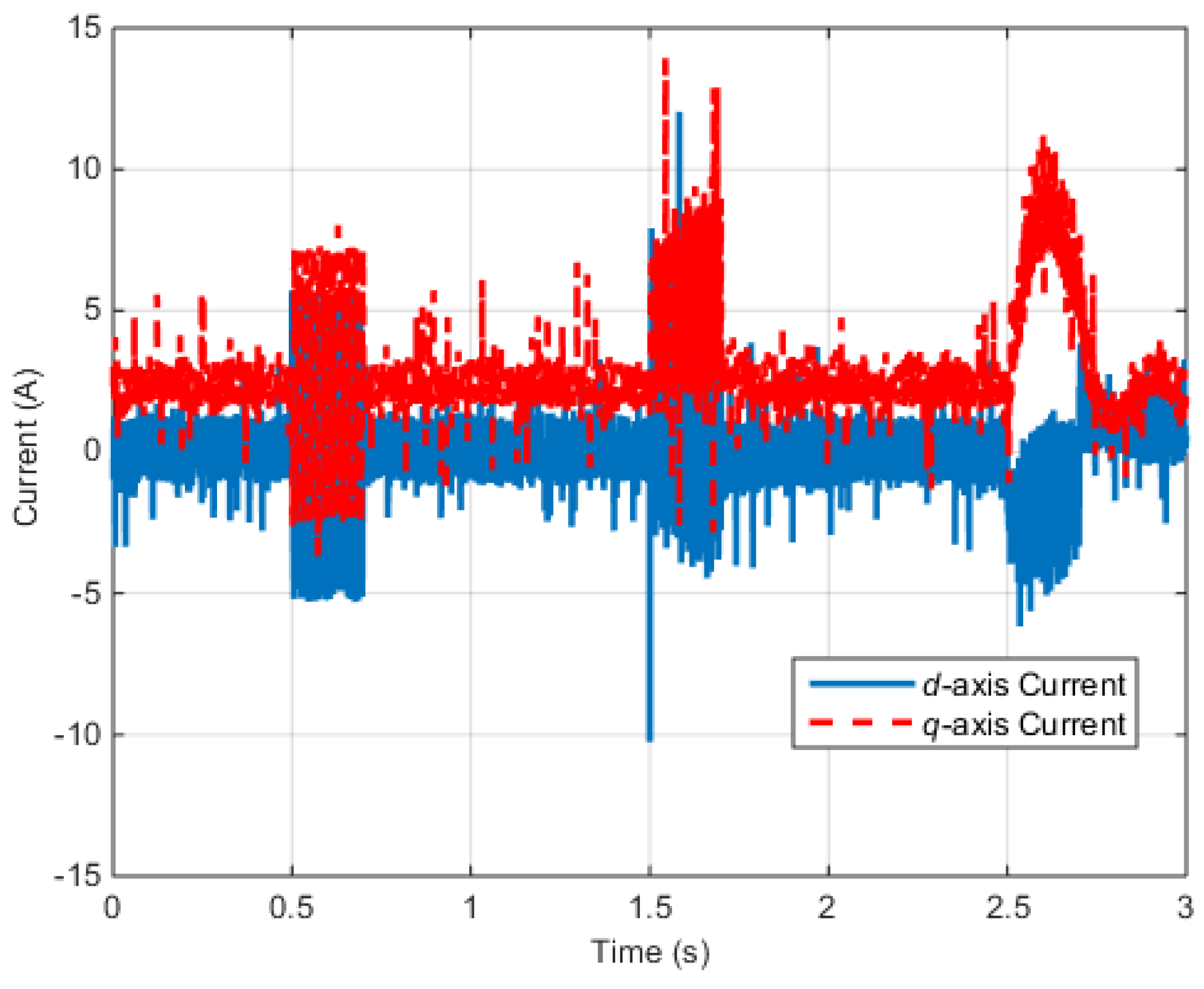
To verify the proposed fault-diagnosis algorithm, Carsim and Matlab/Simulink are used. Among the vehicle models available in Carsim, “E-Class sedan” is considered as the subject. The simulation is conducted at a starting velocity of 20 km/h on a straight line with the throttle set at constant values of 0.2 and 0.5.
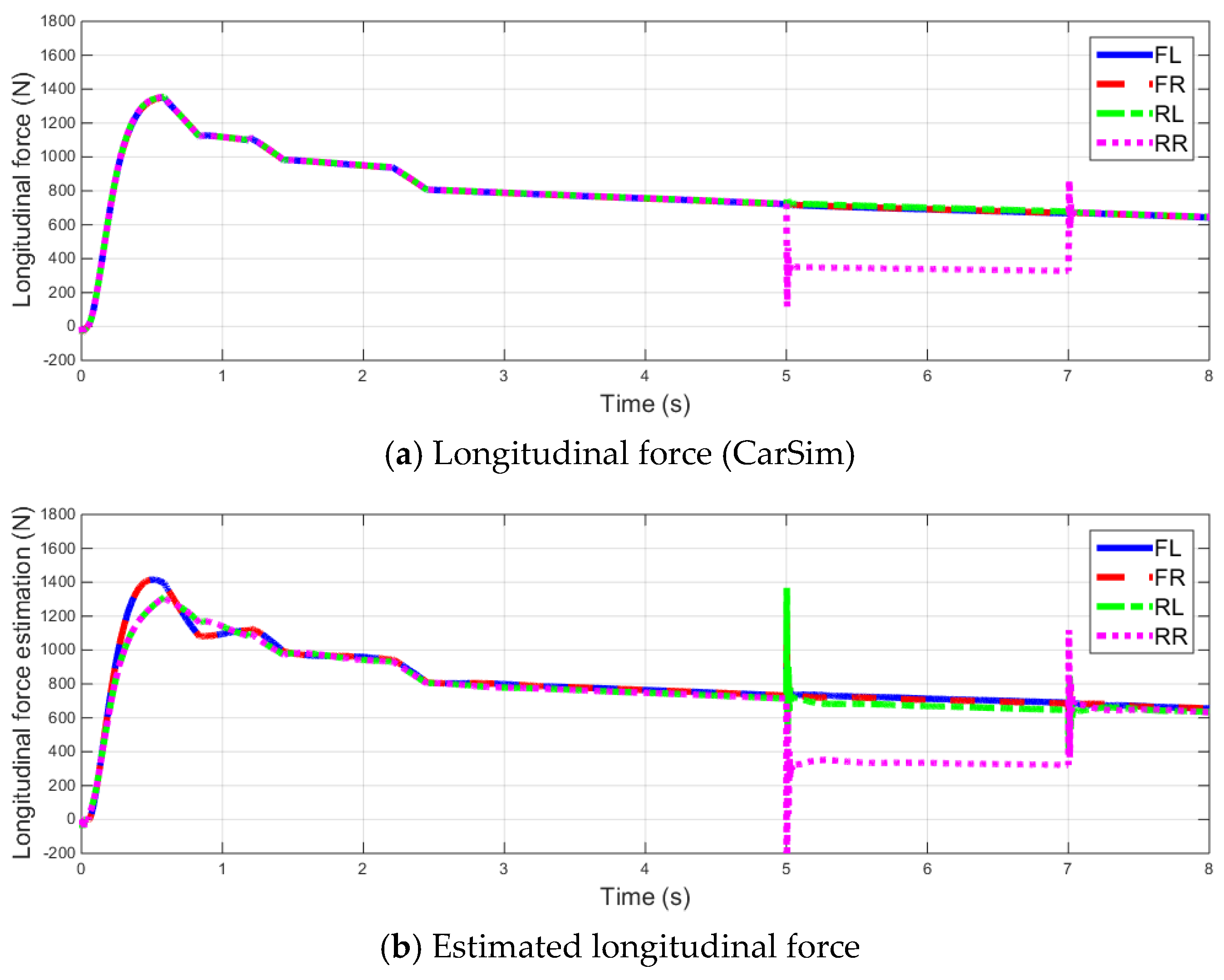
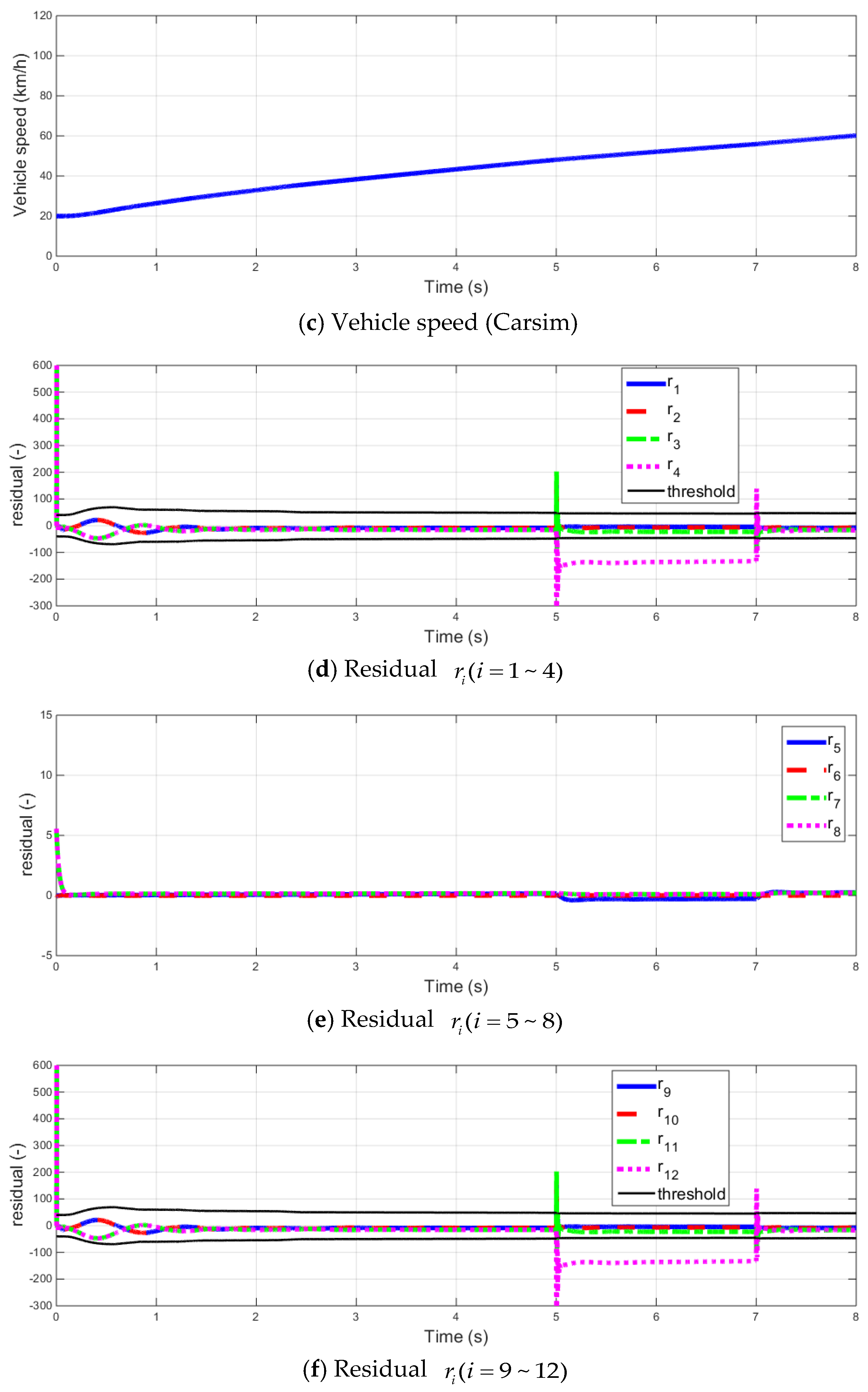
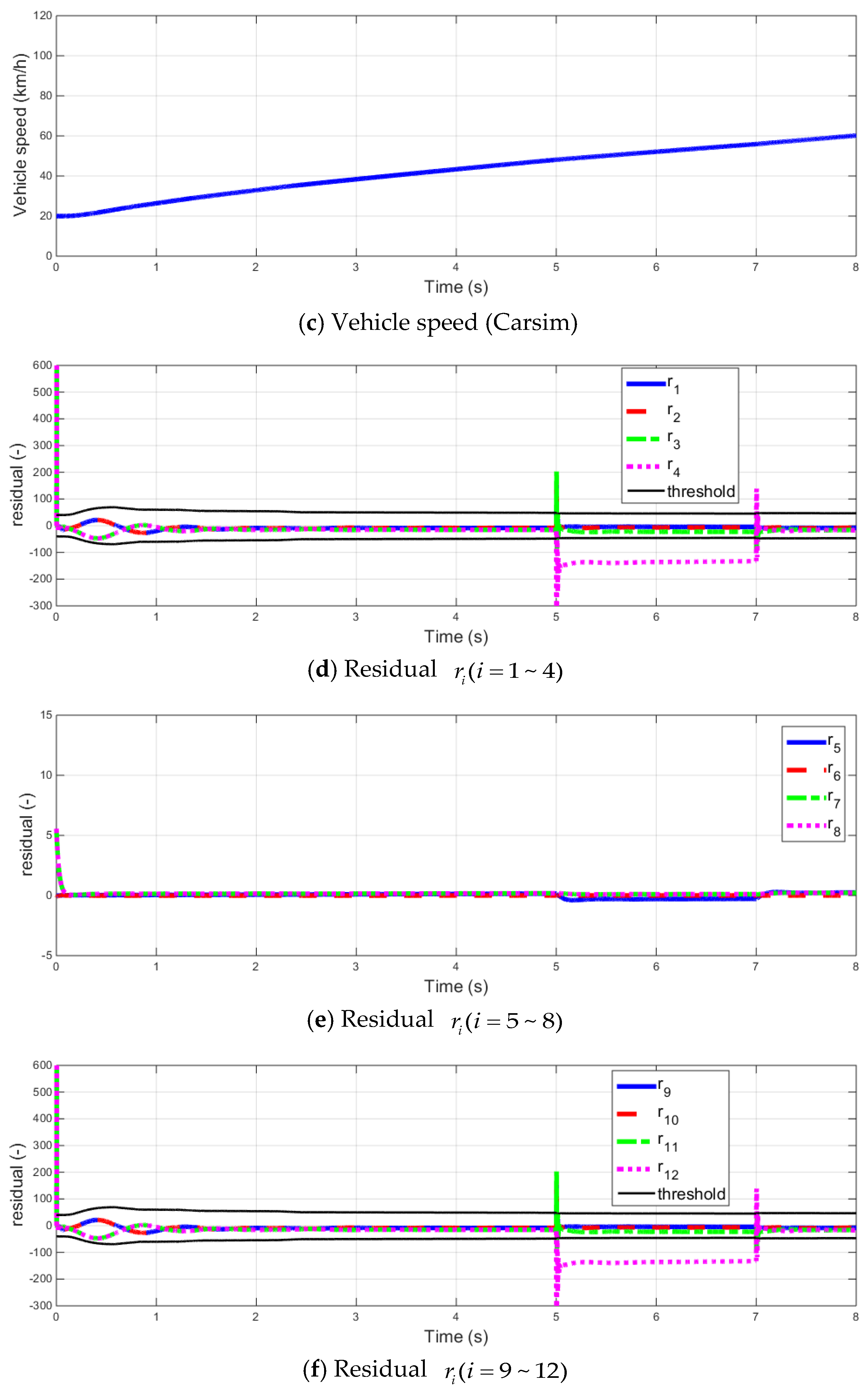
During the simulation, the Motor fault signal is applied at an interval of 5–7 s. The fault signal triggers reduction in the torque in the rear right (RR) wheel drive motor by 30%.
From the simulation results shown in
Figure 5, we can confirm that the estimated longitudinal forces of each wheel, derived from the longitudinal force equation and simple tire model, are almost similar to the actual Carsim value. As the longitudinal wheel slip increases, the residual also increases; therefore, the threshold value can also be set high, which proves the robustness of the model. The fault-diagnosis results according to a fault application from 5 to 7 s can also be separated.
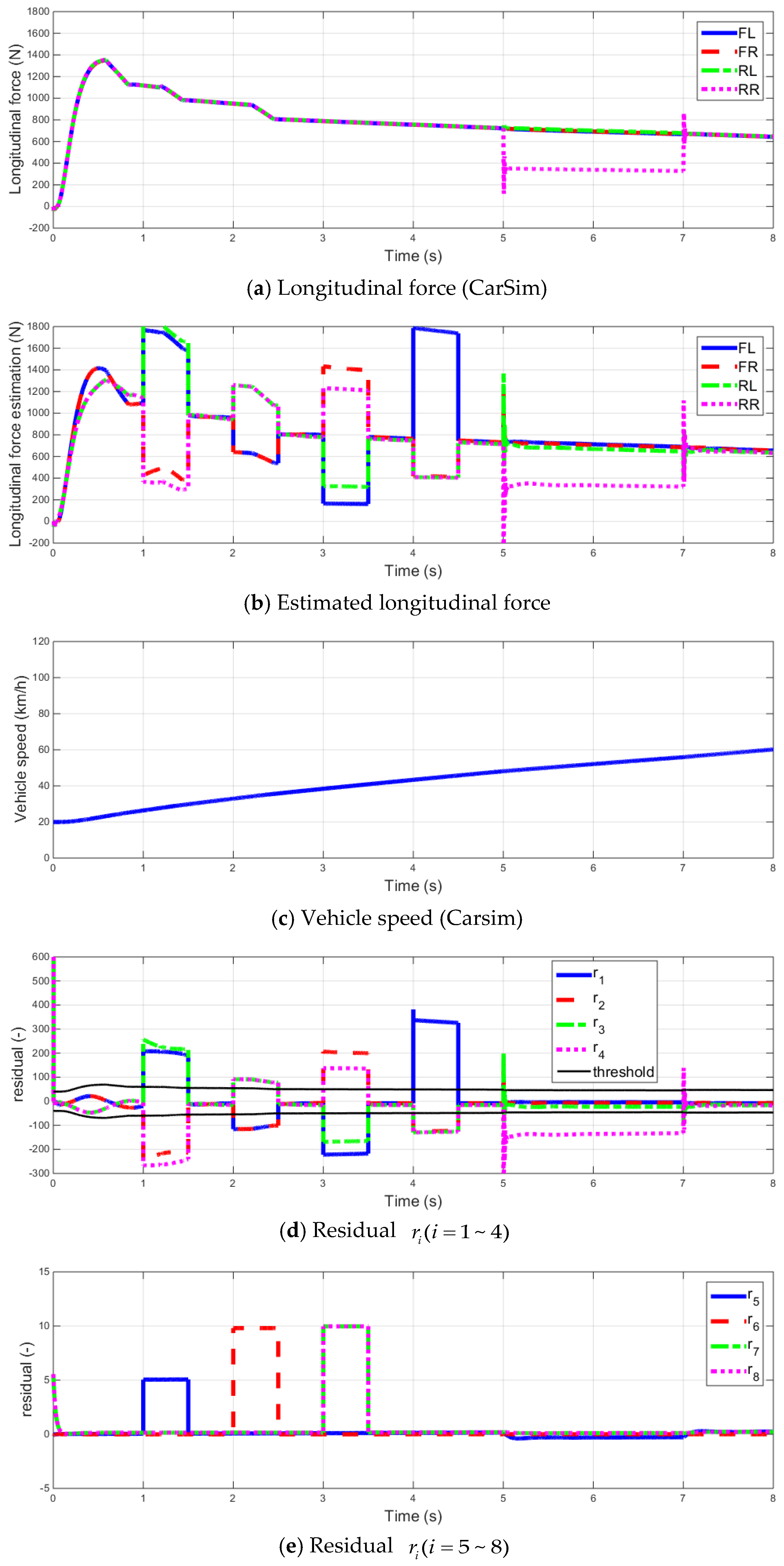
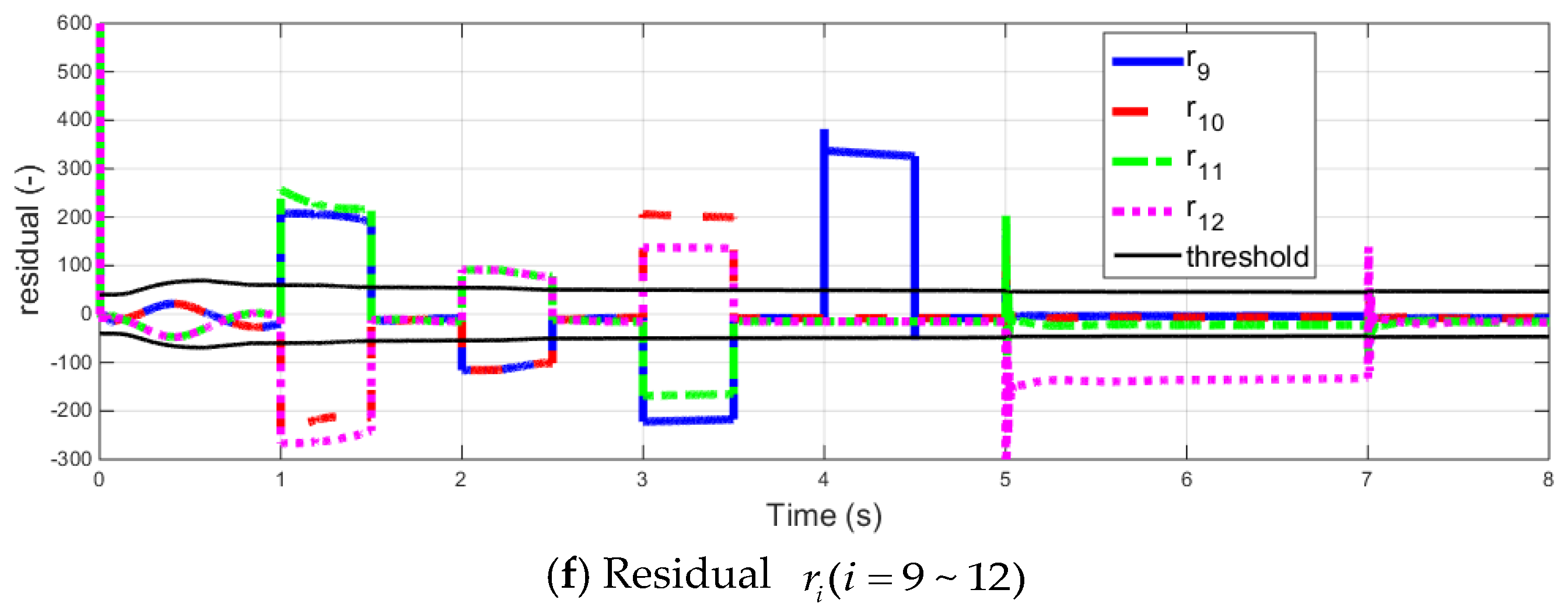
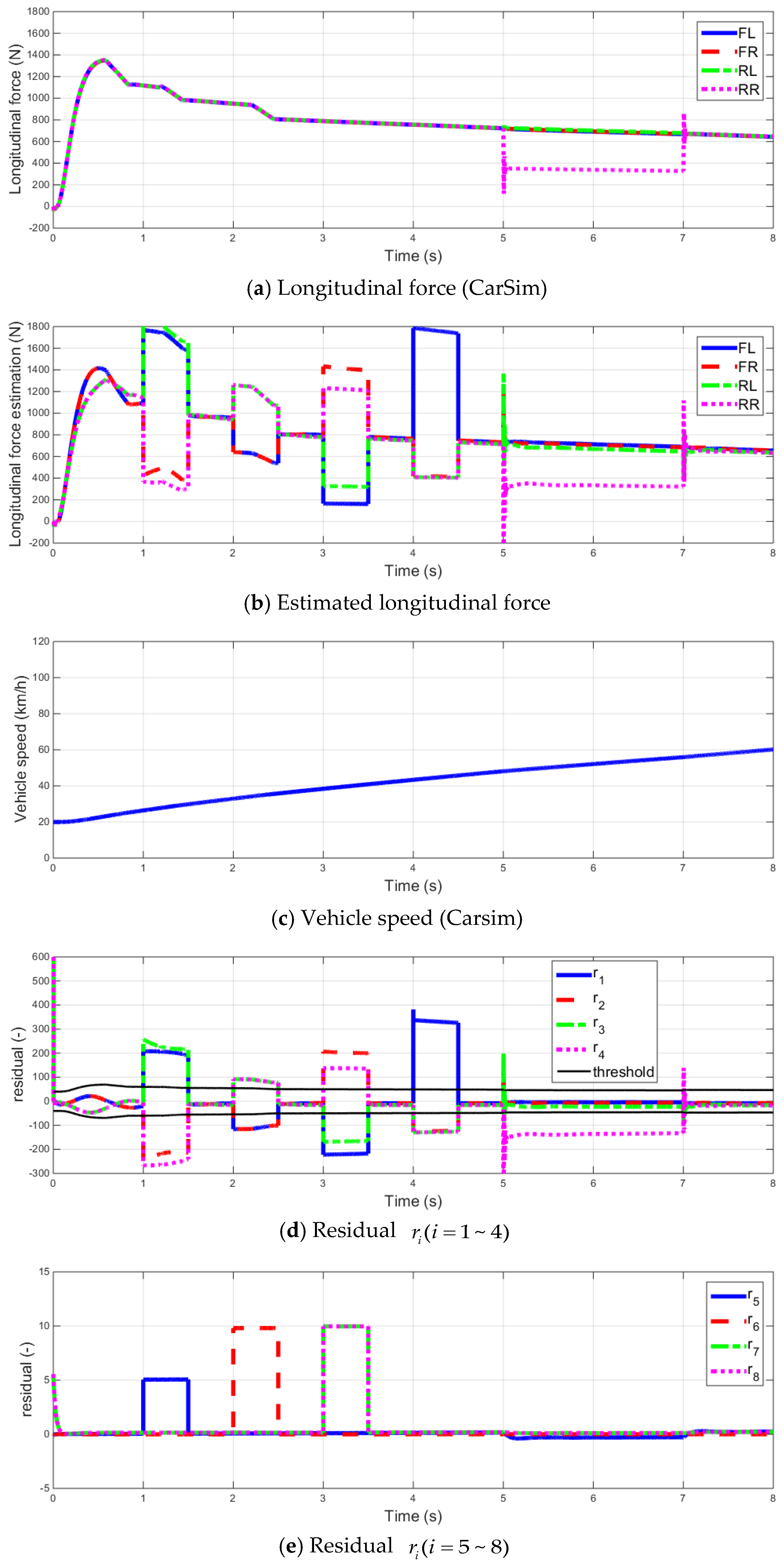
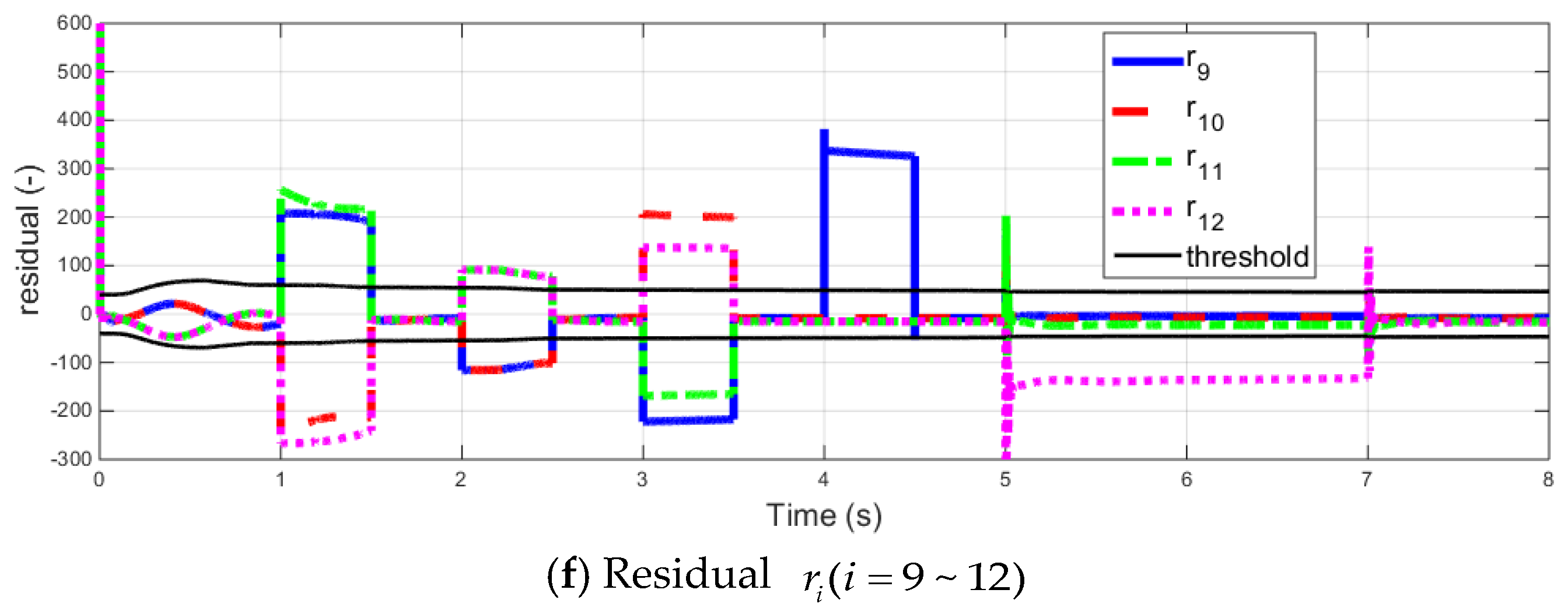
The following simulations were performed by adding vehicle dynamics sensors faults.
The fault signal is applied from 1 to 1.5 s to the yaw rate sensor with an offset of 0.05 rad/s. An offset of g (=9.8 m/s) for the longitudinal dynamics sensor is applied from 2 to 2.5 s, and an offset of g for the lateral dynamics sensor is applied from 3 to 3.5 s. The fault signal of the front left-wheel speed sensor is applied from 4 to 4.5 s with an offset of 1 km/h.
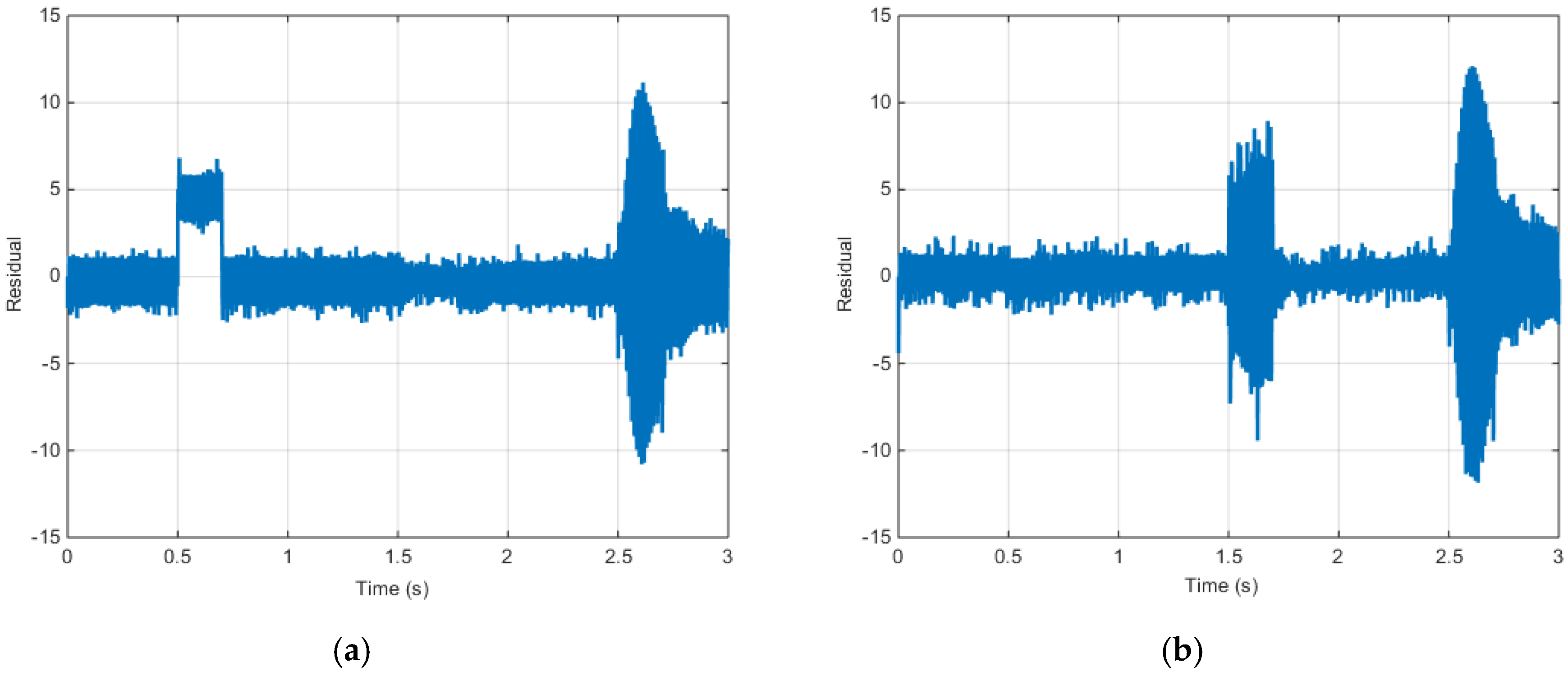
From the simulation results shown in
Figure 6, when vehicle dynamic sensors fail, the estimated longitudinal forces of each wheel are influenced by faults. Similarly, the residual
of fault diagnosis algorithm in [
30,
31] cannot diagnose faults. However, the additional residuals enable diagnosis even in the case of vehicle dynamics sensor faults through
Table 2.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}