
Toward Optimal Computation of Ultrasound Image Reconstruction Using CPU and GPU

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
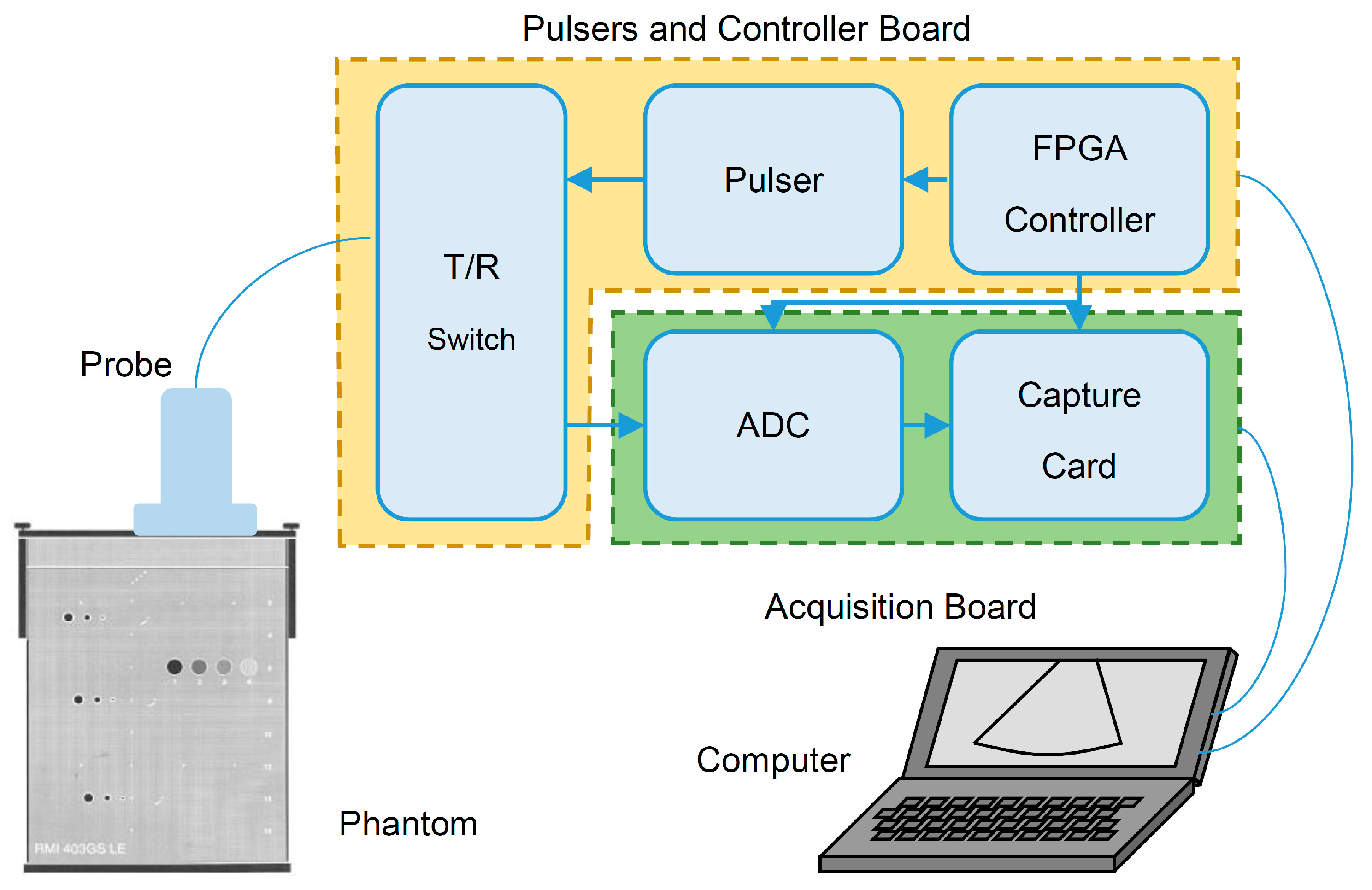
2.1. Ultrasound Imaging System
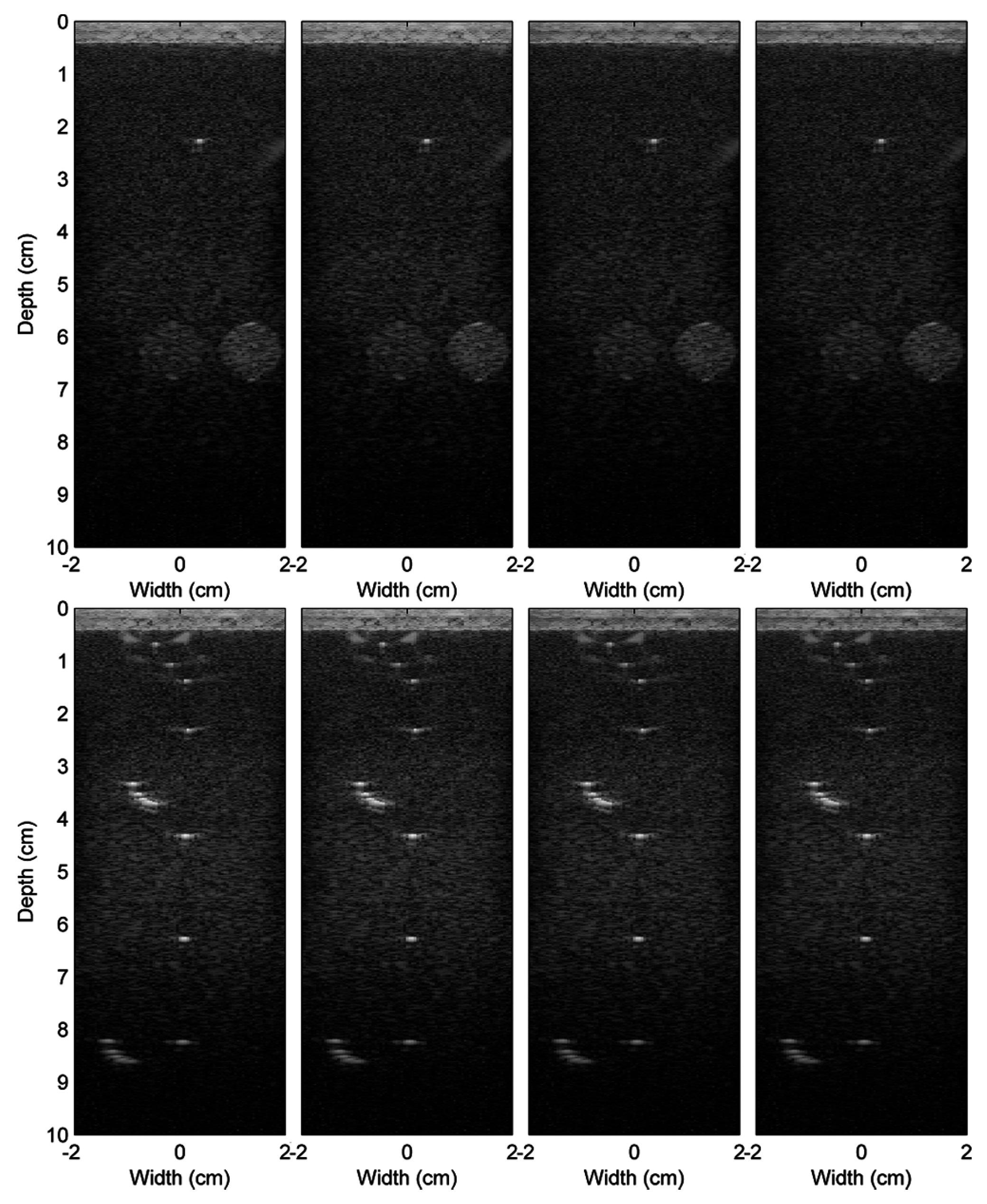
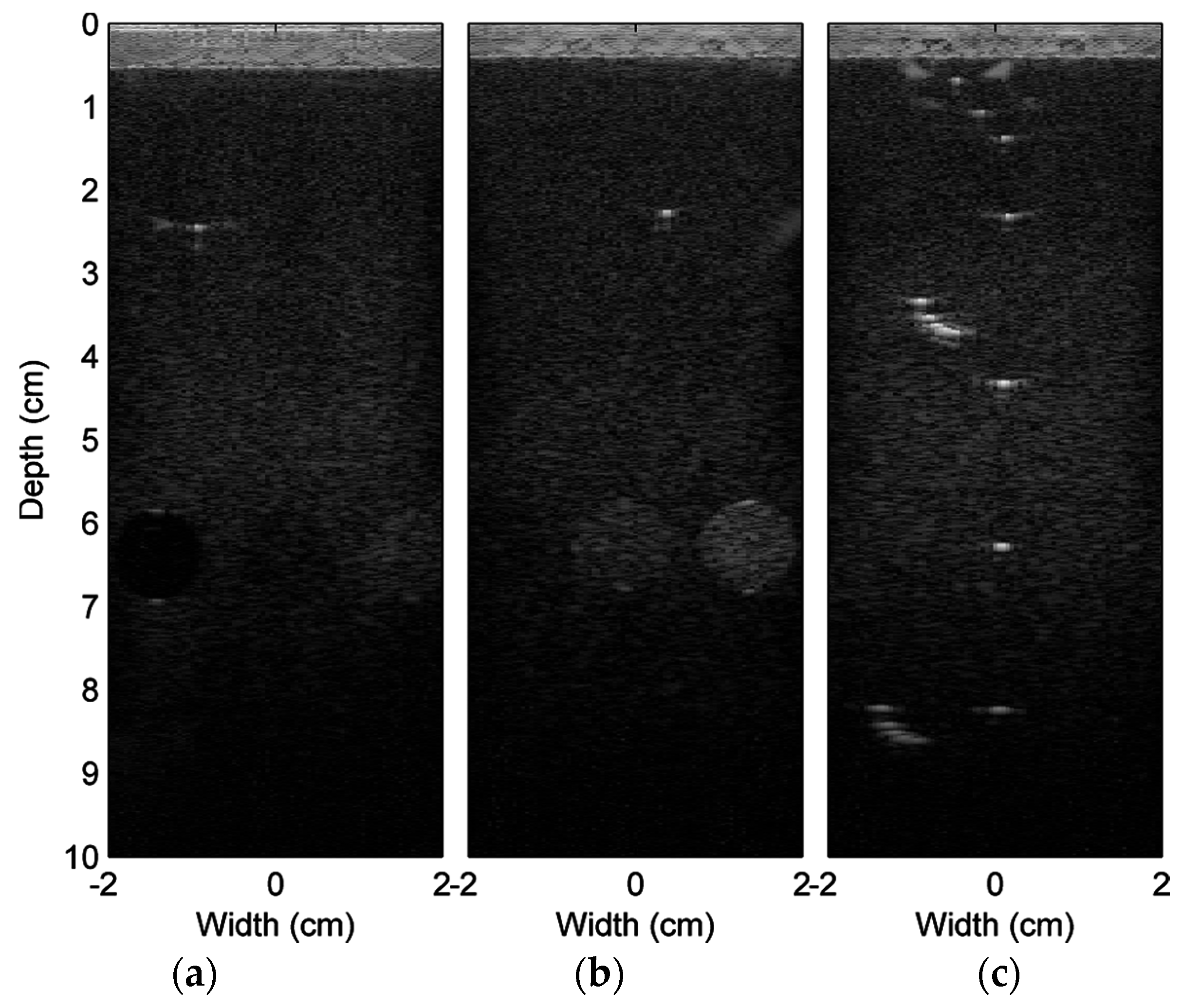
2.2. Experimental Data
2.3. Image Reconstruction Algorithms
2.3.1. DC Cancellation
2.3.2. Beamforming
2.3.3. Envelope Detection
2.3.4. Log Compression
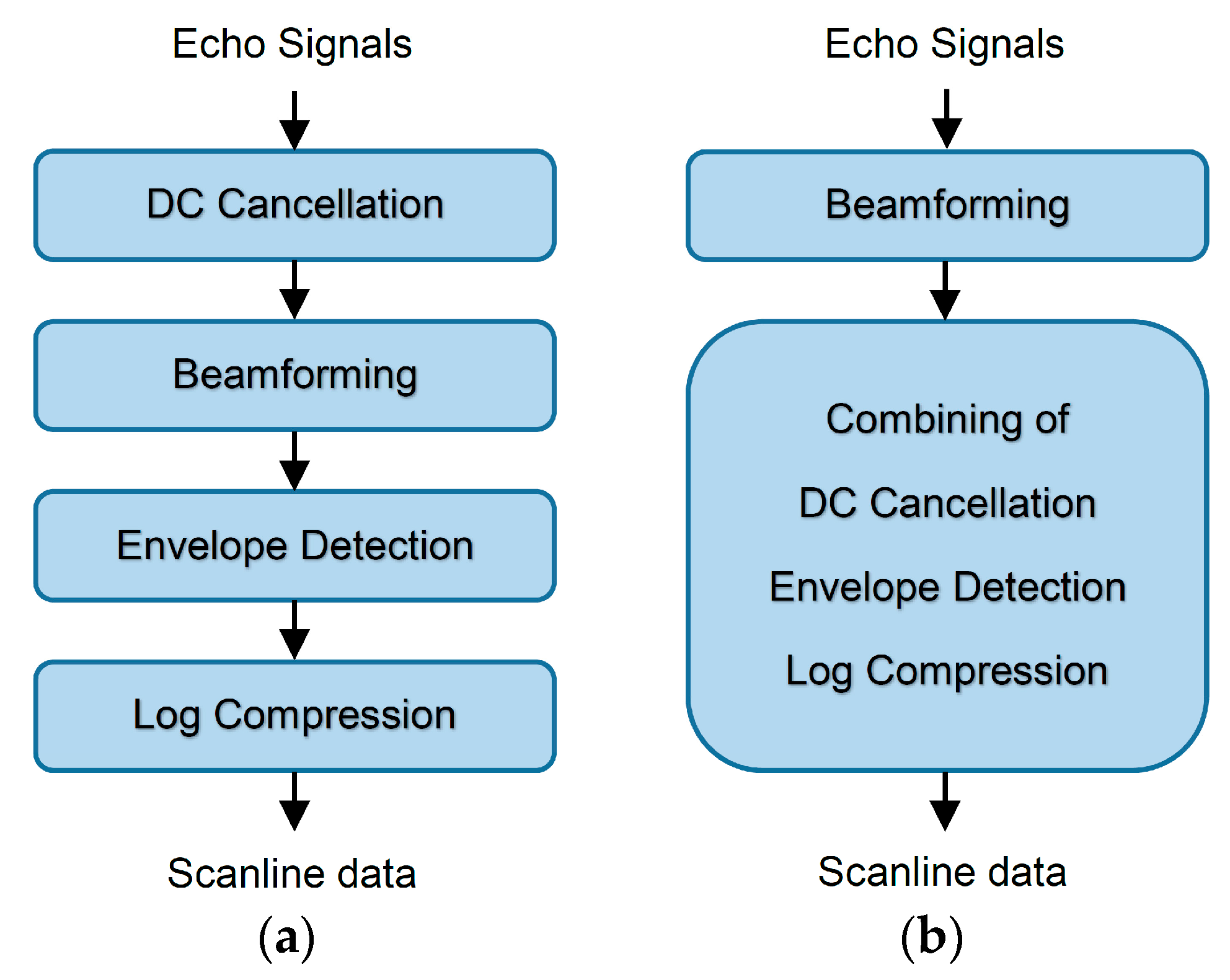
2.3.5. Combining of DC Cancellation, Envelope Detection and Log Compression
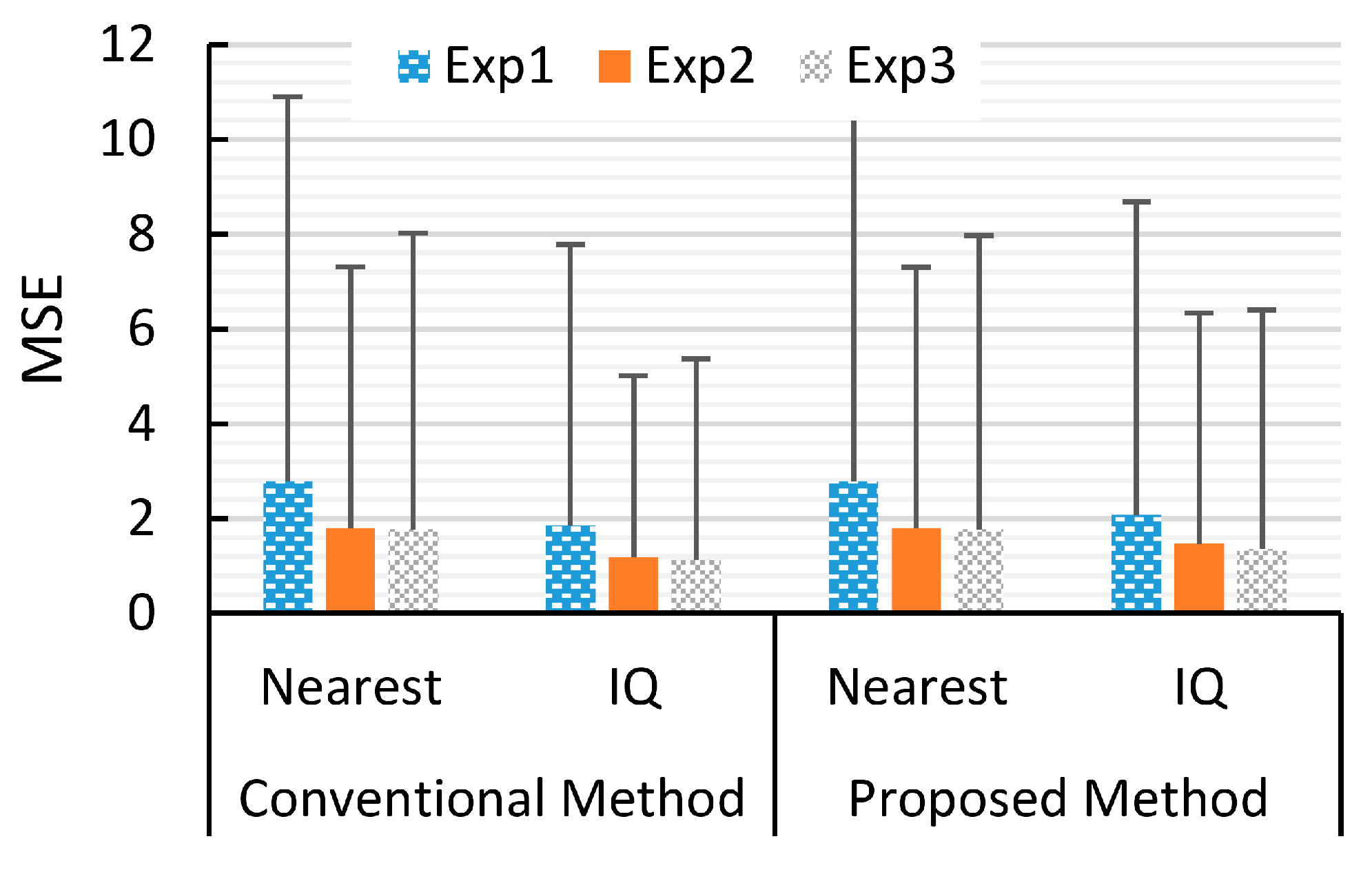
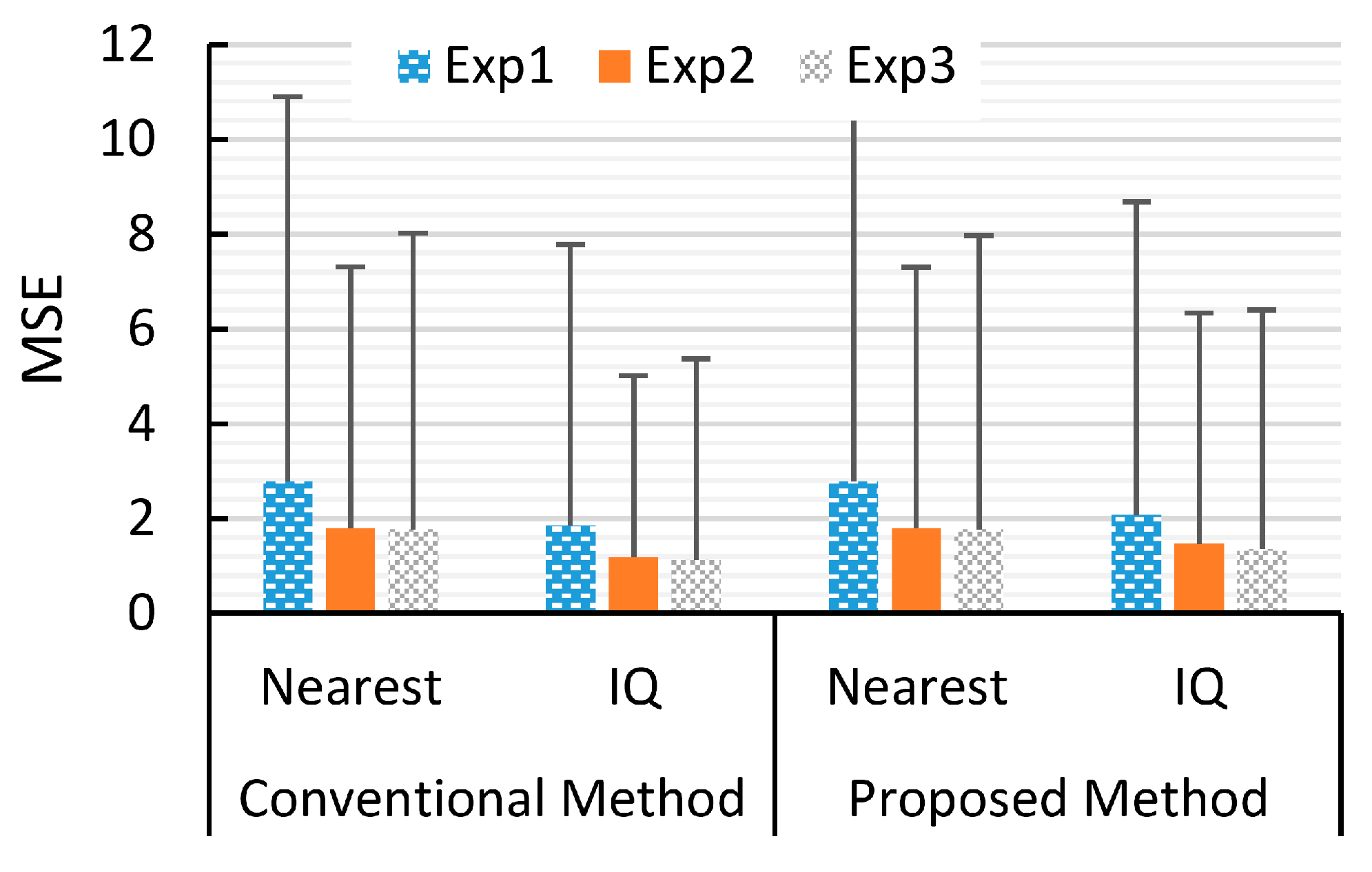
2.4. Beamformed Signal Comparison
2.5. CPU and GPU Programming
3. Results and Discussion
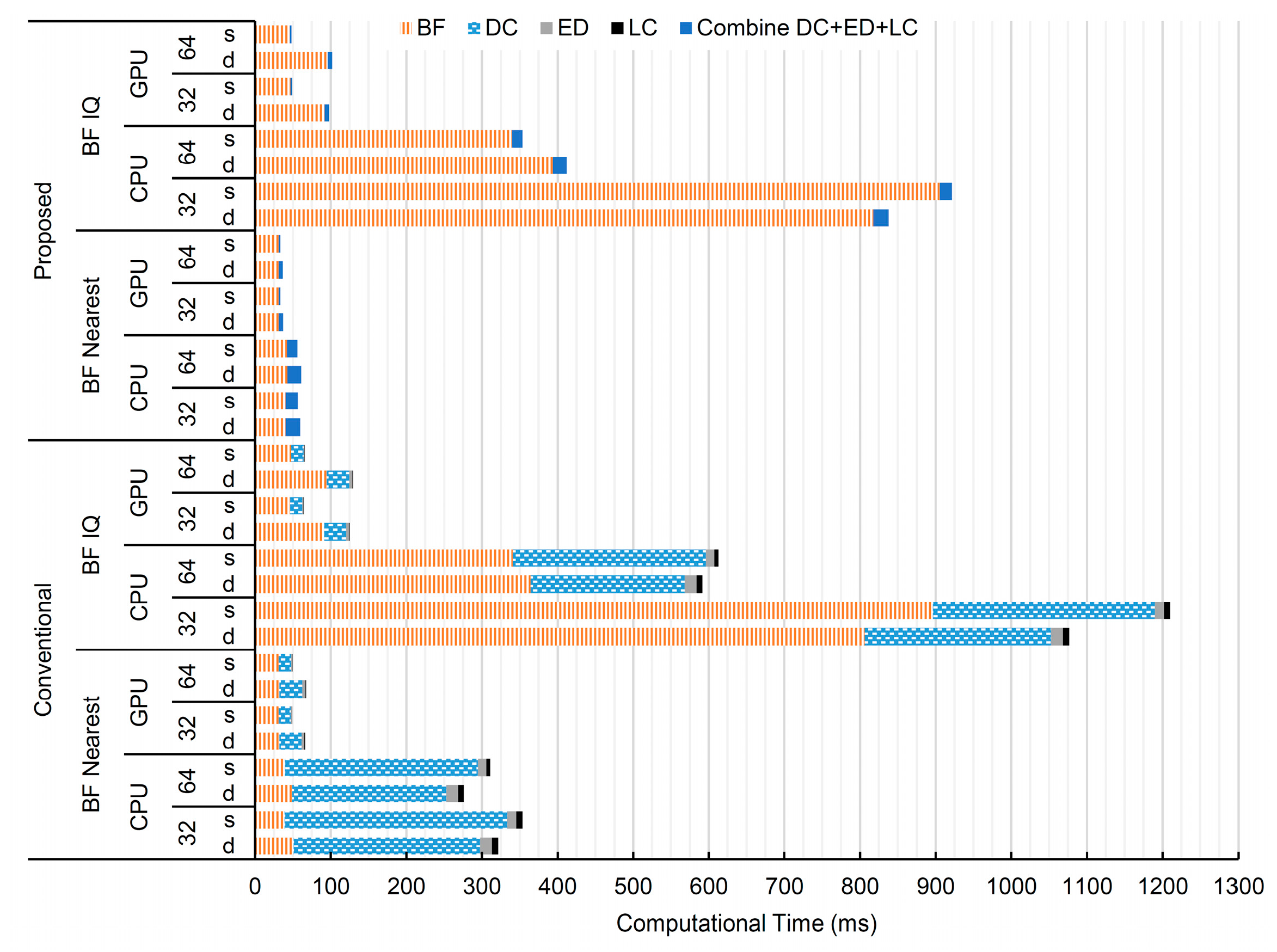
- The purposed method, which switches the DC cancellation and the beamforming, as well as combines the DC cancellation with the envelope detection and log compression, greatly improves the computational time compared to the conventional method. As can be seen, the DC cancellation processing time has almost disappeared from the plot.
- Beamforming using the I/Q interpolation method is slower than that using the nearest sample method. Using the CPU, the gaps are quite large, around 15-times slower. However, using the GPU, the gaps are no more than two-times slower. For the nearest sample method, the best performance in computational time ranges from 31.09 to 31.13 ms using the proposed method and the GPU and any of the 32-bit or 64-bit program platforms or the FP32 or the FP64 formats. For the I/Q interpolation, the best performance is at 45.75 ms using the purposed method, the GPU, the 64-bit platform and the FP32 format.
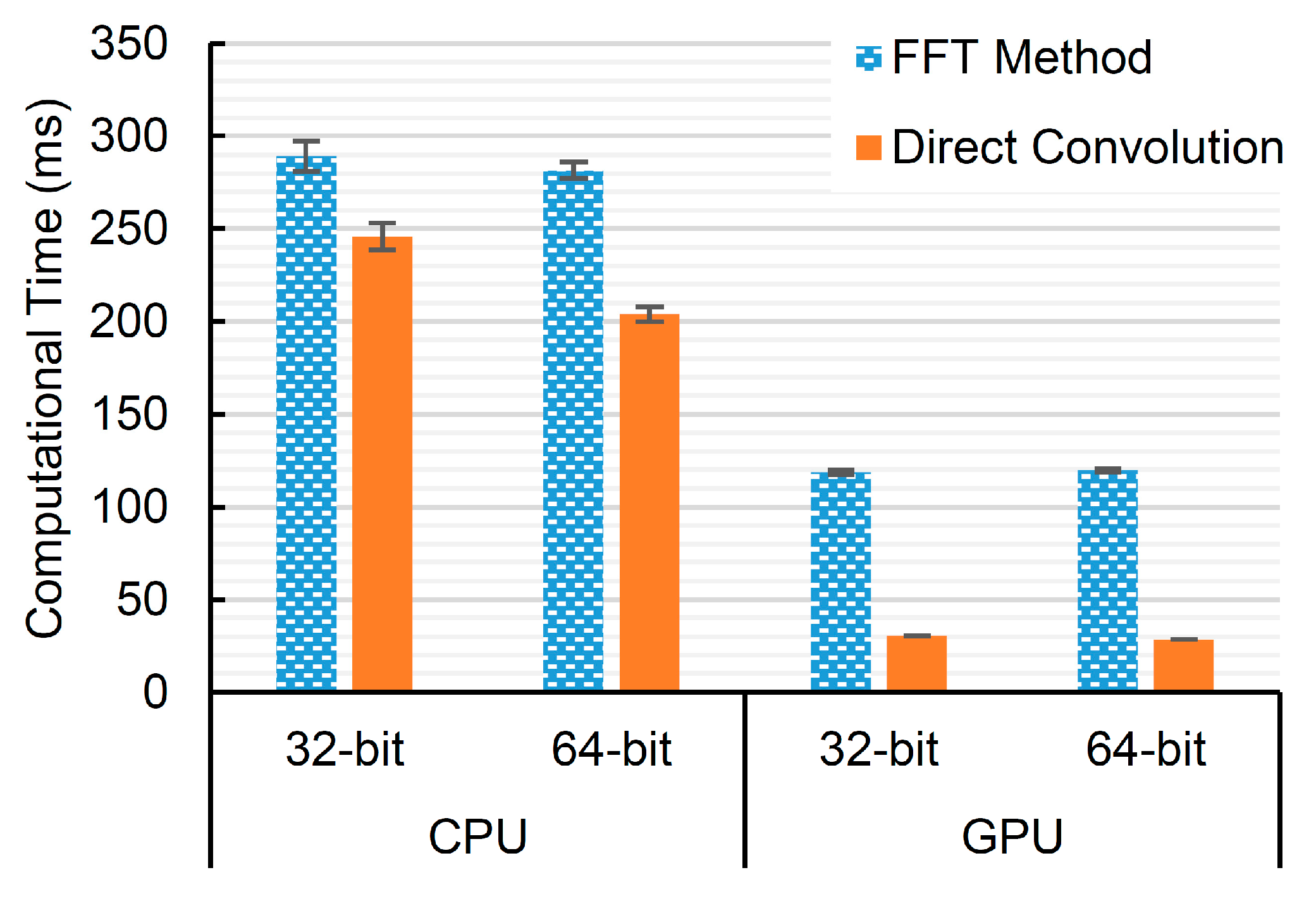
- Using the GPU greatly reduces the processing time. As expected, the GPU parallel computes the tasks using threads, and our tasks can be pleasingly separated into independent threads. Using the GPU needs extra time to upload and download the data between the host and the device, which is quite fast around 8.31 ms for uploading and 1.14 or 0.61 ms for downloading FP64 or FP32 data, respectively. Moreover, these memory transfers between host and device can be performed concurrently with other GPU processes [27].
- Using a 64-bit computer platform program instead of 32-bit improves the computational time impressively and significantly for the schemes using the CPU with the I/Q interpolation method. For other schemes, the results are slightly better. This could be the fact that our testing CPU is an Intel CORE i7, which is a 64-bit CPU [28], which matches with the 64-bit compiled program. Moreover, the I/Q interpolation method requires many arithmetic calculations, compared to the nearest sample counterpart. This makes the advantage be more pronounced in the I/Q interpolation method than the nearest sample method. For the GPU, changing from 32-bit to 64-bit gives slight improvement since most of the calculations are performed on the GPU that has its own instructions independent of the computer platform compilation.
- Using the FP32 format instead of the FP64 provides advantages on the GPU, but slightly and only for some processes and schemes on the CPU. It is certain that using the FP32 format saves memory space and the time to copy the memory between the host computer and the device GPU. Other factors are based on the hardware that intrinsically supports the FP64 computation. For the GPU, the tested Geforce GTX765M supports both FP64 and FP32 computation. However, the number of FP32 units is higher than that of FP64 units. Based on the Kepler (GK106) microarchitecture, the unit ratio of the FP64/FP32 is 1/24 [29]. For this reason, using the FP32 format reduces the computational time. For the CPU, the tested programs are not customized for the Intel CORE i7, which provides instruction sets for the single instruction, multiple data (SIMD) parallel computing, i.e., using multiple processing elements to perform the same operation on multiple data points simultaneously and also known as the streaming SIMD extensions (SSE). These instruction sets provide abilities to perform an instruction on two FP64s or four FP32s simultaneously. The tested program applies only the standard FP units (FPU) that support both FP32 and FP64 data. The data loaded from the memory into the FPU are automatically converted into a double extended-precision FP format on 80-bit registers [30]. The results after operations are converted back into a shorter FP format and transferred back into the memory. For this reason, using the FP32 does not improve the computational time.
- The best performance for total image reconstruction time is at 33.23 ms for using the GPU, the proposed method, the nearest sample method, the 64-bit platform and the FP32 format, excluding the uploading/downloading data. If the CPU is only the option, the best performance is at around 56.06 ms using the proposed method, the nearest sample method, the 64-bit platform and the FP32 format. These could provide the frame rate at 30.1 and 17.8 frames/s for the GPU and the CPU, respectively. If the I/Q interpolation is needed, the best performance is at 47.89 ms using the proposed method, the GPU, the 64-bit platform and the FP32 format. This gives the frame rate around 20.9 frames/s. Note that for our GPU programs, the shared memory is not used yet. All raw data, delay tables and other intermediate variables are all defined in the global memory. It is faster to access the shared memory than the global memory. A better algorithm that utilizes the shared memory is still needed. However, the size of the shared memory is limited (48 kBytes), and the memory management to avoid bank conflict, i.e., accessing many data from the same memory bank and making the access to be done in serial instead of parallel, is challenging.
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Hansen, H.H.; Richards, M.S.; Doyley, M.M.; Korte, C.L. Noninvasive vascular displacement estimation for relative elastic modulus reconstruction in transversal imaging planes. Sensors 2013, 13, 3341–3357. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ilunga-Mbuyamba, E.; Avina-Cervantes, J.G.; Lindner, D.; Cruz-Aceves, I.; Arlt, F.; Chalopin, C. Vascular Structure Identification in Intraoperative 3D Contrast-Enhanced Ultrasound Data. Sensors 2016, 16, 497. [Google Scholar] [CrossRef] [PubMed]
- Li, M.; Hayward, G. Ultrasound nondestructive evaluation (NDE) imaging with transducer arrays and adaptive processing. Sensors 2012, 12, 42–54. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Guarneri, G.A.; Pipa, D.R.; Junior, F.N.; de Arruda, L.V.; Zibetti, M.V. A sparse reconstruction algorithm for ultrasonic images in nondestructive testing. Sensors 2015, 15, 9324–9343. [Google Scholar] [CrossRef] [PubMed]
- Gutiérrez-Fernández, C.; Jiménez, A.; Martín-Arguedas, C.J.; Urena, J.; Hernández, A. A novel encoded excitation scheme in a phased array for the improving data acquisition rate. Sensors 2014, 14, 549–563. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Chen, X.; Wang, Y.; Li, W.; Yu, D. Eigenspace-Based Generalized Sidelobe Canceler Beamforming Applied to Medical Ultrasound Imaging. Sensors 2016, 16, 1192. [Google Scholar] [CrossRef] [PubMed]
- O’Donnell, M.; Engeler, W.E.; Pedicone, J.T.; Itani, A.M.; Noujaim, S.E.; Dunki-Jacobs, R.J.; Leue, W.M.; Chalek, C.L.; Smith, L.S.; Piel, J.E.; et al. Real-time phased array imaging using digital beam forming and autonomous channel control. Proc. IEEE Ultrason. Symp. 1990, 1499–1502. [Google Scholar] [CrossRef]
- Freeman, S.R.; Quick, M.K.; Morin, M.A.; Anderson, R.C.; Desilets, C.S.; Linnenbrink, T.E.; O’Donnell, M. Delta-sigma oversampled ultrasound beamformer with dynamic delays. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1999, 46, 320–332. [Google Scholar] [CrossRef] [PubMed]
- Techavipoo, U.; Boonyanant, P.; Samphanyuth, S.; Intarapanich, A.; Sununtachaikul, U.; Thajchayapong, P. Generalized subsample delays using sample shift and CORDIC for ultrasound beamforming. In Proceedings of the Biomedical Engineering International Conference (BMEiCON), Kyoto, Japan, 27–28 August 2010; pp. 88–91.
- Kim, G.D.; Yoon, C.; Kye, S.B.; Lee, Y.; Kang, J.; Yoo, Y.; Song, T.K. A single FPGA-based portable ultrasound imaging system for point-of-care applications. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2012, 59, 1386–1394. [Google Scholar]
- Schneider, F.K.; Agarwal, A.; Yoo, Y.M.; Fukuoka, T.; Kim, Y. A fully programmable computing architecture for medical ultrasound machines. IEEE Trans. Inf. Technol. Biomed. 2010, 14, 538–540. [Google Scholar] [CrossRef] [PubMed]
- Siritan, T.; Techavipoo, U.; Worasawate, D.; Keinprasit, R.; Pinunsottikul, P.; Sugino, N.; Thajchayapong, P. Beamforming complexity reduction methods for low-cost FPGA-based implementation. In Proceedings of the 6th Biomedical Engineering International Conference (BMEiCON), Krabi, Thailand, 23–25 October 2013; pp. 1–4.
- Siritan, T.; Techavipoo, U.; Worasawate, D.; Keinprasit, R.; Pinunsottikul, P.; Sugino, N.; Thajchayapong, P. Enhanced pseudo-dynamic receive beamforming using focusing delay error compensation. In Proceedings of the 7th Biomedical Engineering International Conference (BMEiCON), Fukuoka, Japan, 26–28 November 2014; pp. 1–4.
- Techavipoo, U.; Pinunsottikul, P.; Keinprasit, R.; Thajchayapong, P. Simplified Pseudo-Dynamic Receive Beamforming For FPGA Implementation. In Proceedings of the 8th Biomedical Engineering International Conference (BMEiCON), Pattaya, Thailand, 25–27 November 2015; pp. 1–4.
- Owens, J.D.; Houston, M.; Luebke, D.; Green, S.; Stone, J.E.; Phillips, J.C. GPU computing. Proc. IEEE 2008, 96, 879–899. [Google Scholar] [CrossRef]
- Yiu, B.Y.S.; Tsang, I.K.H.; Yu, A.C.H. GPU-based beam-former: Fast realization of plane wave compounding and synthetic aperture imaging. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2011, 58, 1698–1705. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Martín-Arguedas, C.J.; Romero-Laorden, D.; Martinez-Graullera, O.; Pérez-López, M.; Gomez-Ullate, L. An ultrasonic imaging system based on a new SAFT approach and a GPU beamformer. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2012, 59, 1402–1412. [Google Scholar] [CrossRef] [PubMed]
- Romero, D.; Martinez-Graullera, O.; Martin, C.J.; Higuti, R.T.; Octavio, A. Using GPUs for beamforming acceleration on SAFT imaging. In Proceedings of the 2009 IEEE International Ultrasonics Symposium, Roma, Italy, 20–23 September 2009; pp. 1334–1337.
- Bae, S.; Kang, J.; Yoo, J.; Yoo, Y.; Chang, J.H.; Song, T. Real-time realization of adaptive dynamic quadrature demodulation on a gpu-based ultrasound imaging system. In Proceedings of the 2012 IEEE International Ultrasonics Symposium, Dresden, Germany, 7–10 October 2012; pp. 1651–1654.
- Boonleelakul, W.; Techavipoo, U.; Worasawate, D.; Keinprasit, R.; Sunpetchniyom, T.; Sugino, N.; Thajchayapong, P. Ultrasound Beamforming and Image Reconstruction using CPU and GPU. In Proceedings of the International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology, Chiang Mai, Thailand, 28 June–1 July 2016.
- Techavipoo, U.; Keinprasit, R.; Pinunsottikul, P.; Jewajinda, Y.; Punyasai, C.; Thajchayapong, P.; Siritan, T.; Worasawate, D. An ultrasound imaging system prototype for raw data acquisition. In Proceedings of the Biomedical Engineering International Conference (BMEiCON), Ubon Ratchathani, Thailand, 5–7 December 2012; pp. 1–4.
- Marple, S.L. Computing the Discrete-Time Analytic Signal via FFT. IEEE Trans. Signal Process. 1999, 47, 2600–2603. [Google Scholar] [CrossRef]
- Frigo, M.; Johnson, S.G. FFTW 3.3.5. Available online: http://www.fftw.org (accessed on 23 August 2016).
- Smith, J.O., III. FFT Versus Direct Convolution. Available online: https://www.dsprelated.com/freebooks/sasp (accessed on 23 August 2016).
- Savioja, L.; Välimäki, V.; Smith, J.O. Audio signal processing using graphics processing units. J. Audio Eng. Soc. 2011, 59, 3–19. [Google Scholar]
- Ophir, J.; Cepedes, I.; Ponnekanti, H.; Yazdi, Y.; Li, X. Elastography: A quantitative method for imaging the elasticity of biological tissues. Ultrason. Imaging 1991, 13, 111–134. [Google Scholar] [CrossRef] [PubMed]
- Wilt, N. Streams and Events. In The CUDA Handbook a Comprehensive Guide to GPU Programming; Addison-Wesley: Crawfordsville, IN, USA, 2013; pp. 173–204. [Google Scholar]
- Turley, J. Introduction to Intel Architecture. Intel Corp., Santa Clara, CA, USA. White Paper 2014. Available online: http://www.intel.com/content/dam/www/public/us/en/documents/white-papers/ia-introduction-basics-paper.pdf (accessed on 23 August 2016).
- Smith, R. The NVIDIA GeForce GTX 660 Review: GK106 Fills Out the Kepler Family. Available online: http://www.anandtech.com/show/6276/nvidia-geforce-gtx-660-review-gk106-rounds-out-the-kepler-family (accessed on 8 September 2016).
- Intel Corp. Chapter 8: Programming with the x87 FPU. Available online: http://download.intel.com/design/processor/ manuals/253665.pdf (accessed on 8 September 2016).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ultrasound Processes | BF Nearest | BF IQ | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| CPU | GPU | CPU | GPU | ||||||||||||||
| 32 | 64 | 32 | 64 | 32 | 64 | 32 | 64 | ||||||||||
| d | s | d | s | d | s | d | s | d | s | d | s | d | s | d | s | ||
| Conventional Method | |||||||||||||||||
| BF | mean | 50.69 | 38.86 | 48.92 | 39.38 | 32.12 | 31.08 | 32.14 | 31.05 | 805.95 | 896.12 | 364.28 | 340.86 | 91.17 | 46.41 | 94.80 | 47.56 |
| sd | 6.71 | 7.87 | 5.28 | 7.83 | 0.034 | 0.030 | 0.031 | 0.029 | 8.39 | 8.74 | 9.31 | 6.77 | 0.036 | 0.039 | 0.034 | 0.037 | |
| DC | mean | 246.82 | 294.80 | 203.93 | 255.41 | 29.35 | 16.28 | 30.26 | 16.58 | 246.91 | 293.72 | 203.96 | 255.36 | 29.14 | 16.20 | 29.90 | 16.46 |
| sd | 6.82 | 5.54 | 3.75 | 7.44 | 0.036 | 0.034 | 0.023 | 0.028 | 6.45 | 6.50 | 3.68 | 7.50 | 0.028 | 0.022 | 0.041 | 0.024 | |
| ED | mean | 15.66 | 11.82 | 15.74 | 11.24 | 3.85 | 1.20 | 3.90 | 1.21 | 15.66 | 11.88 | 15.71 | 10.95 | 3.84 | 1.19 | 3.90 | 1.21 |
| sd | 1.29 | 6.73 | 1.30 | 7.03 | 0.036 | 0.049 | 0.025 | 0.017 | 0.47 | 6.69 | 1.31 | 7.18 | 0.031 | 0.020 | 0.027 | 0.016 | |
| LC | mean | 8.12 | 8.46 | 7.45 | 4.98 | 0.98 | 0.14 | 0.99 | 0.14 | 8.24 | 8.30 | 7.78 | 5.88 | 0.98 | 0.14 | 0.99 | 0.14 |
| sd | 7.82 | 7.79 | 7.80 | 7.28 | 0.001 | 0.005 | 0.001 | 0.003 | 7.78 | 7.77 | 7.82 | 7.59 | 0.001 | 0.003 | 0.001 | 0.004 | |
| Total | 321.29 | 353.94 | 276.03 | 311.01 | 66.29 | 48.69 | 67.30 | 48.99 | 1076.76 | 1210.01 | 591.72 | 613.04 | 125.13 | 63.94 | 129.59 | 65.37 | |
| Proposed Method | |||||||||||||||||
| BF | mean | 40.13 | 40.19 | 42.37 | 42.17 | 31.13 | 31.13 | 31.09 | 31.09 | 817.52 | 905.38 | 393.62 | 340.01 | 91.98 | 46.87 | 96.12 | 45.75 |
| sd | 7.76 | 7.75 | 7.10 | 7.19 | 0.056 | 0.056 | 0.044 | 0.048 | 8.52 | 7.63 | 6.33 | 7.17 | 0.038 | 0.101 | 0.037 | 0.070 | |
| Combine DC + ED + LC | mean | 19.56 | 16.22 | 18.51 | 13.90 | 5.77 | 2.12 | 5.72 | 2.14 | 20.21 | 16.48 | 18.73 | 13.53 | 5.69 | 2.12 | 5.76 | 2.14 |
| sd | 6.80 | 3.04 | 6.09 | 4.91 | 0.036 | 0.021 | 0.027 | 0.014 | 7.06 | 3.51 | 6.27 | 5.35 | 0.033 | 0.020 | 0.025 | 0.017 | |
| Total | 59.69 | 56.41 | 60.88 | 56.06 | 36.89 | 33.25 | 36.80 | 33.23 | 837.73 | 921.85 | 412.35 | 353.54 | 97.67 | 48.98 | 101.88 | 47.89 | |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Techavipoo, U.; Worasawate, D.; Boonleelakul, W.; Keinprasit, R.; Sunpetchniyom, T.; Sugino, N.; Thajchayapong, P. Toward Optimal Computation of Ultrasound Image Reconstruction Using CPU and GPU. Sensors 2016, 16, 1986. https://doi.org/10.3390/s16121986
Techavipoo U, Worasawate D, Boonleelakul W, Keinprasit R, Sunpetchniyom T, Sugino N, Thajchayapong P. Toward Optimal Computation of Ultrasound Image Reconstruction Using CPU and GPU. Sensors. 2016; 16(12):1986. https://doi.org/10.3390/s16121986
Chicago/Turabian StyleTechavipoo, Udomchai, Denchai Worasawate, Wittawat Boonleelakul, Rachaporn Keinprasit, Treepop Sunpetchniyom, Nobuhiko Sugino, and Pairash Thajchayapong. 2016. "Toward Optimal Computation of Ultrasound Image Reconstruction Using CPU and GPU" Sensors 16, no. 12: 1986. https://doi.org/10.3390/s16121986