
Development and Sensing Properties Study of Underwater Assembled Water Depth-Inclination Sensors for a Multi-Component Mooring System, Using a Self-Contained Technique

Abstract
:1. Introduction
2. Underwater Prototype Monitoring Strategy of the Multi-Component Mooring System
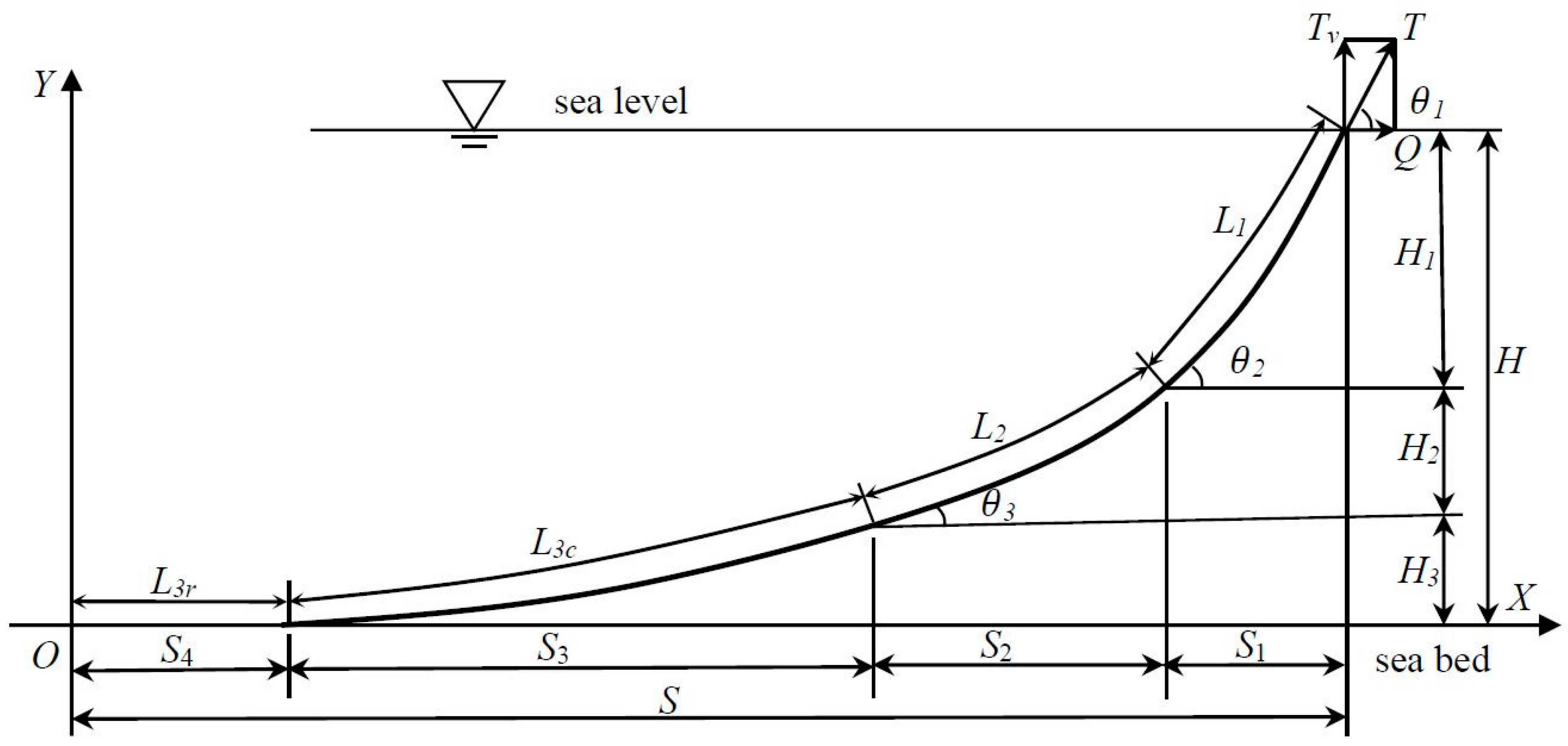
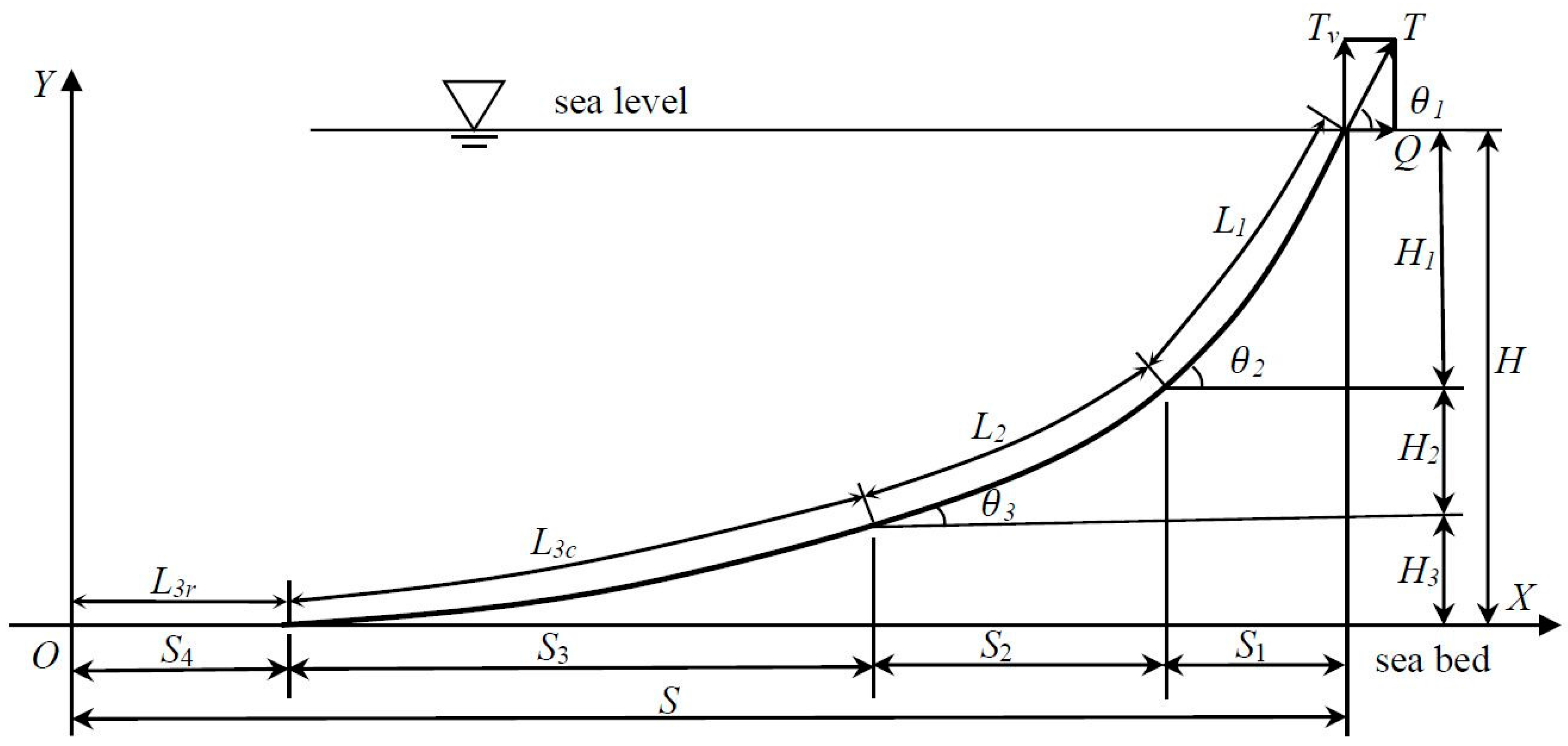
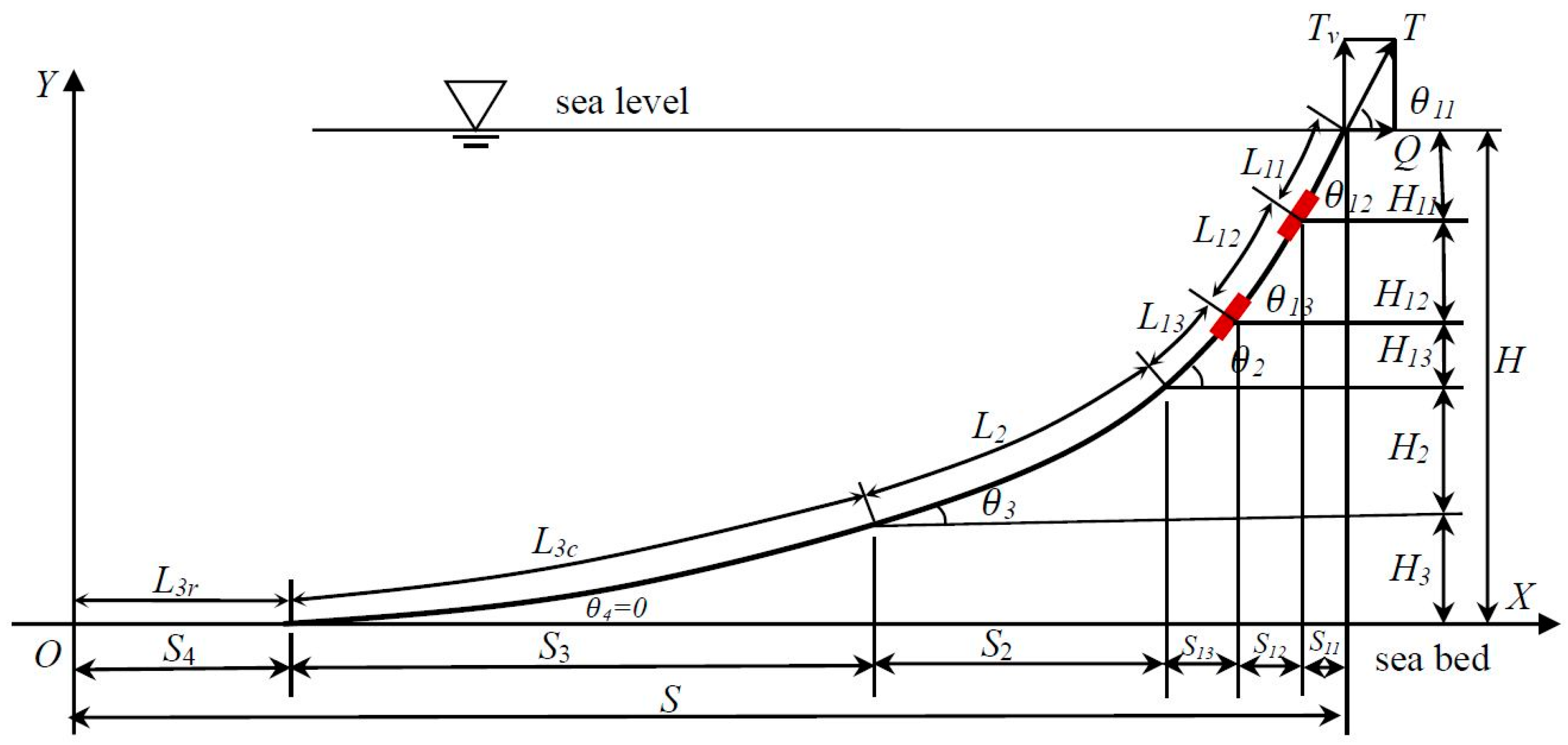
2.1. Governing Equations for the Multi-Component Mooring System
2.2. Underwater Prototype Monitoring Methodology
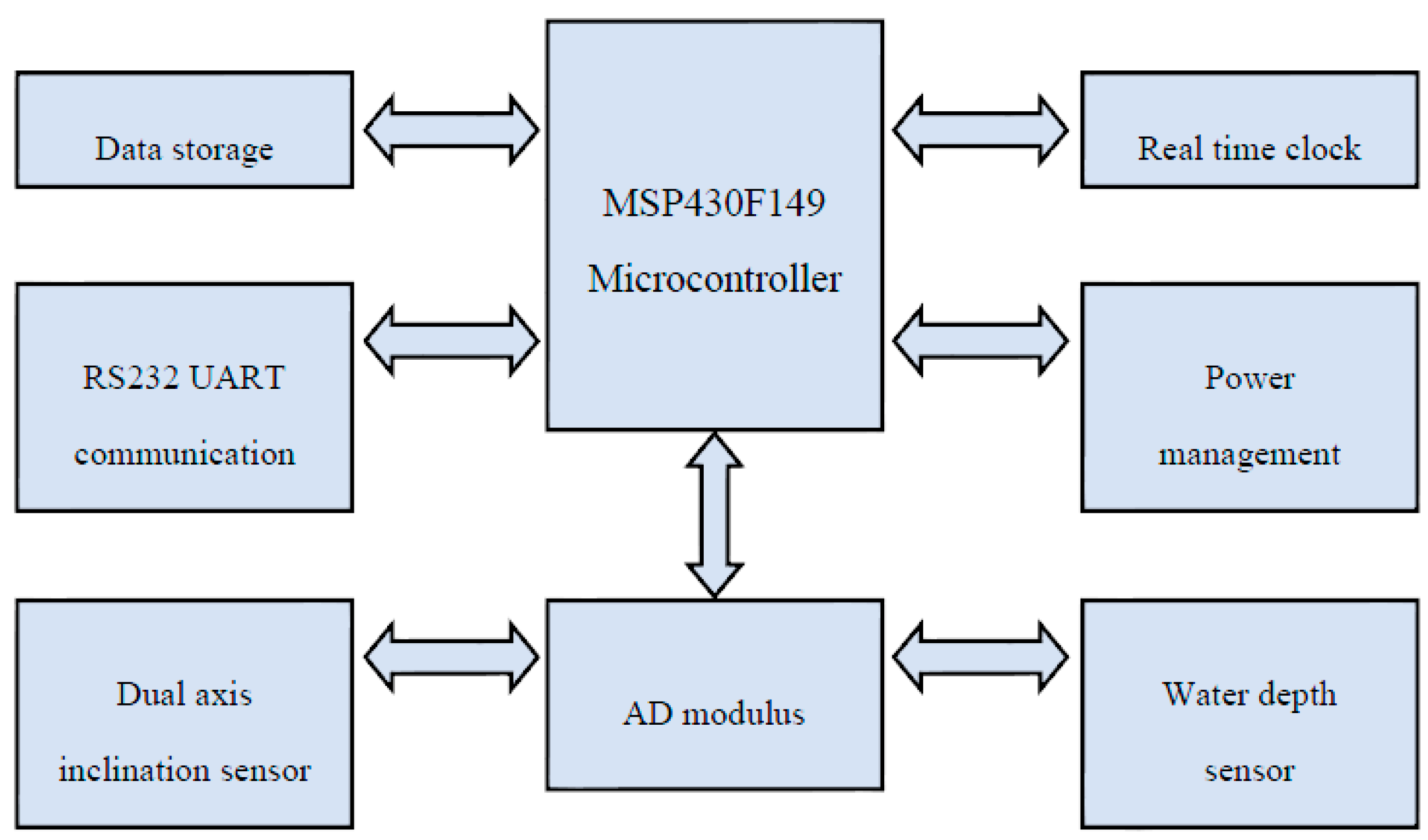
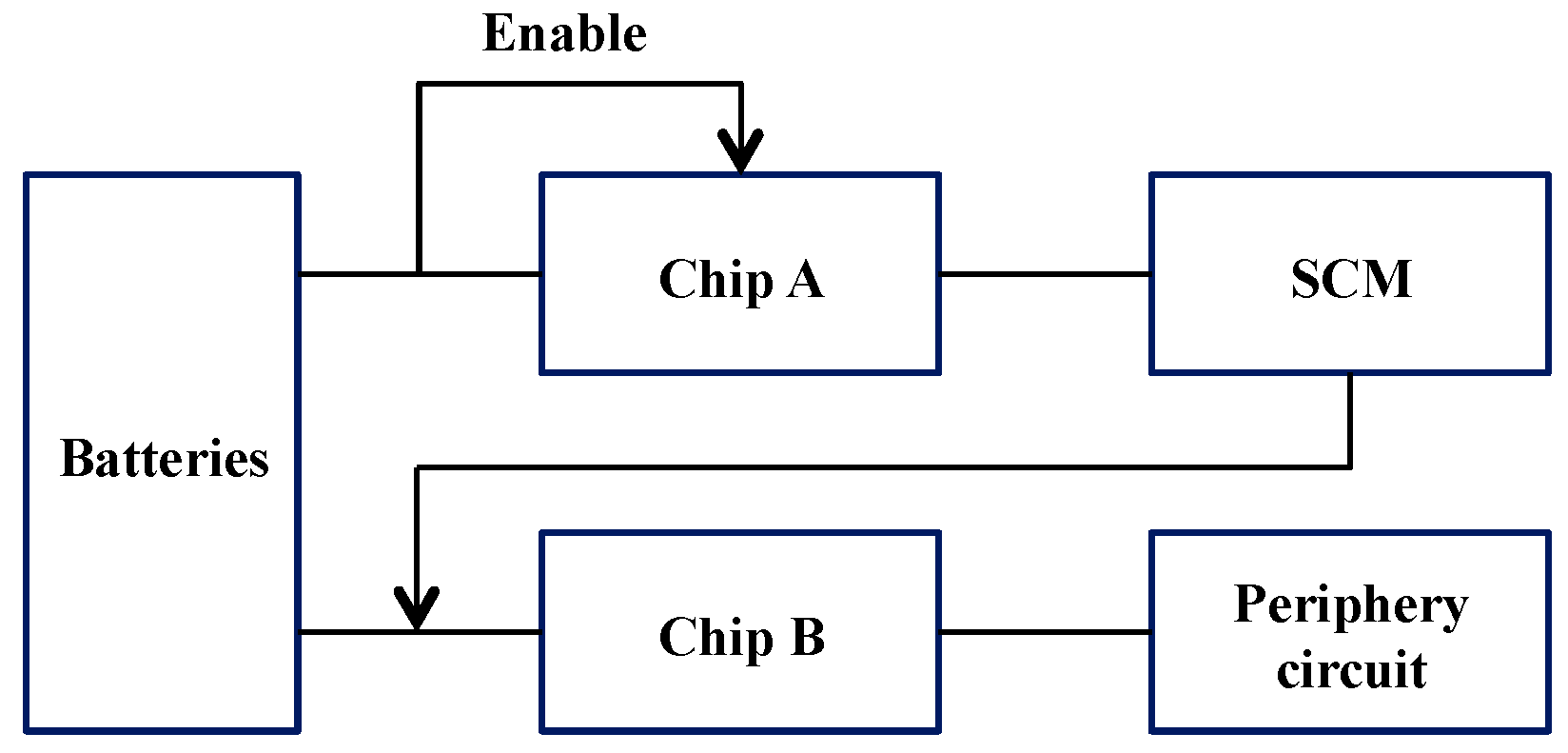
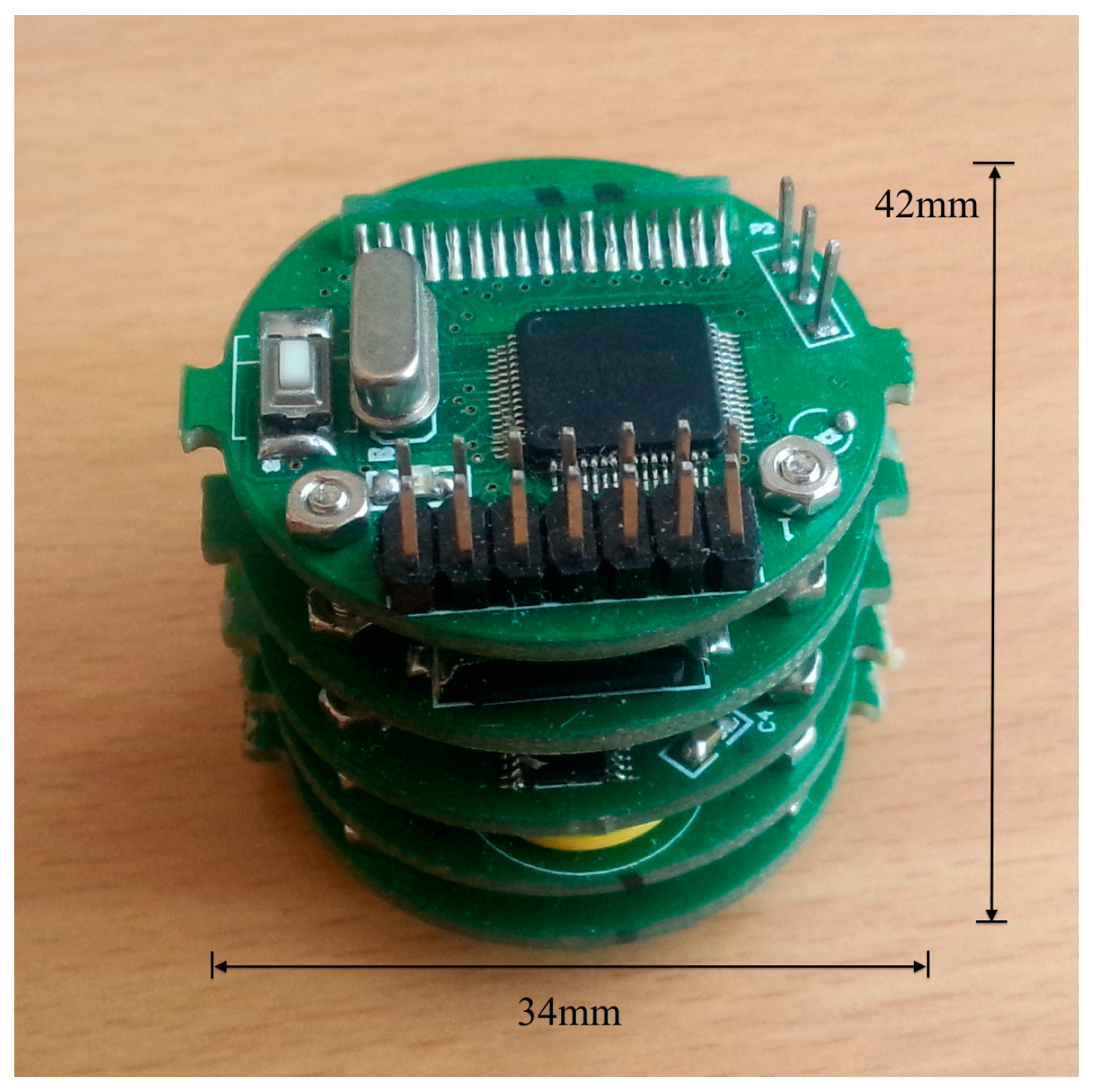
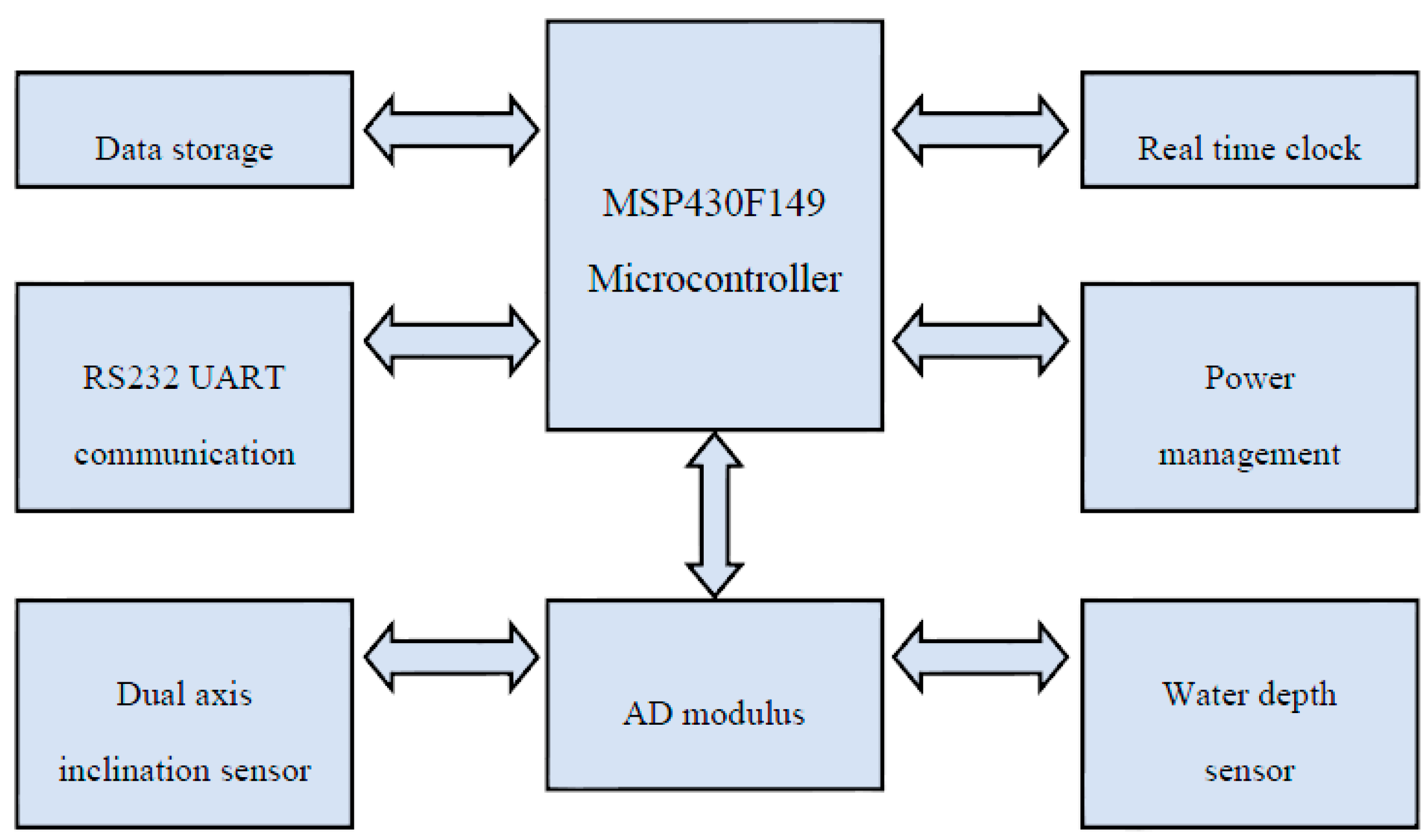
3. Design of Underwater Standalone Water Depth-Inclination Sensor
4. Sensor Calibration, Field Test and Data Analysis
4.1. Protective Sealed Barrel and Installation Clamp
4.2. Sensor Calibration
- (1)
- Level zero drift performance. A self-contained tilt angle sensor was placed on the platform at 0° for 24 h before the data were collected, with a collecting frequency of 1 Hz, then the fluctuating case of the data was observed. After many experiments, finally the measured drift distance of sensor was shown to be less than 0.01°, thus satisfying the measurement demands.
- (2)
- Static measuring performance. The test board was used to set the different static angles, which were then measured with a self-contained tilt angle sensor. A group of typical measuring results is shown in Table 3. It is indicated that the maximum static angle difference of between self-contained tilt angle sensor and TCS tile meter is within 0.01°, thus meeting the design requirements.
- (3)
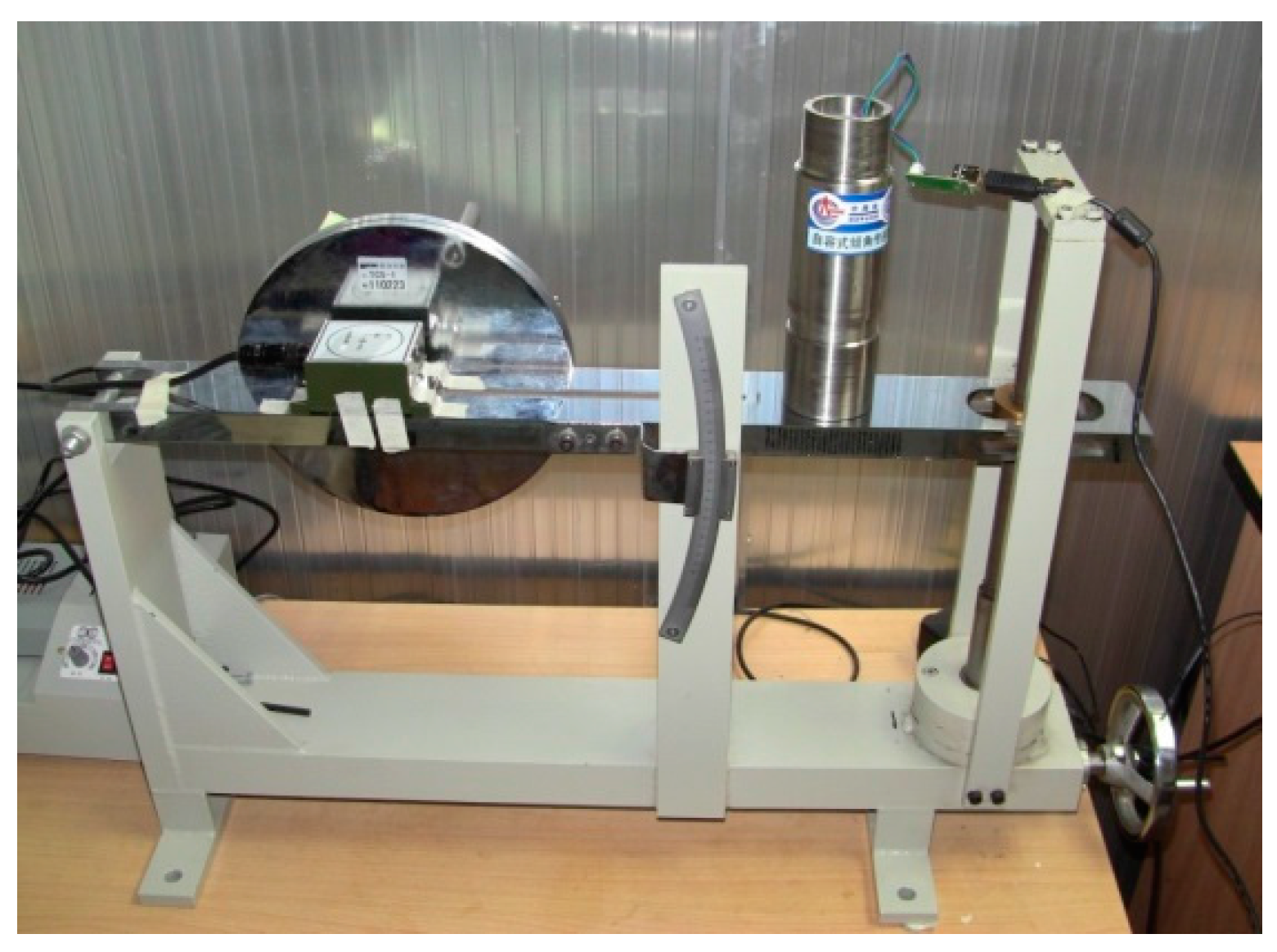
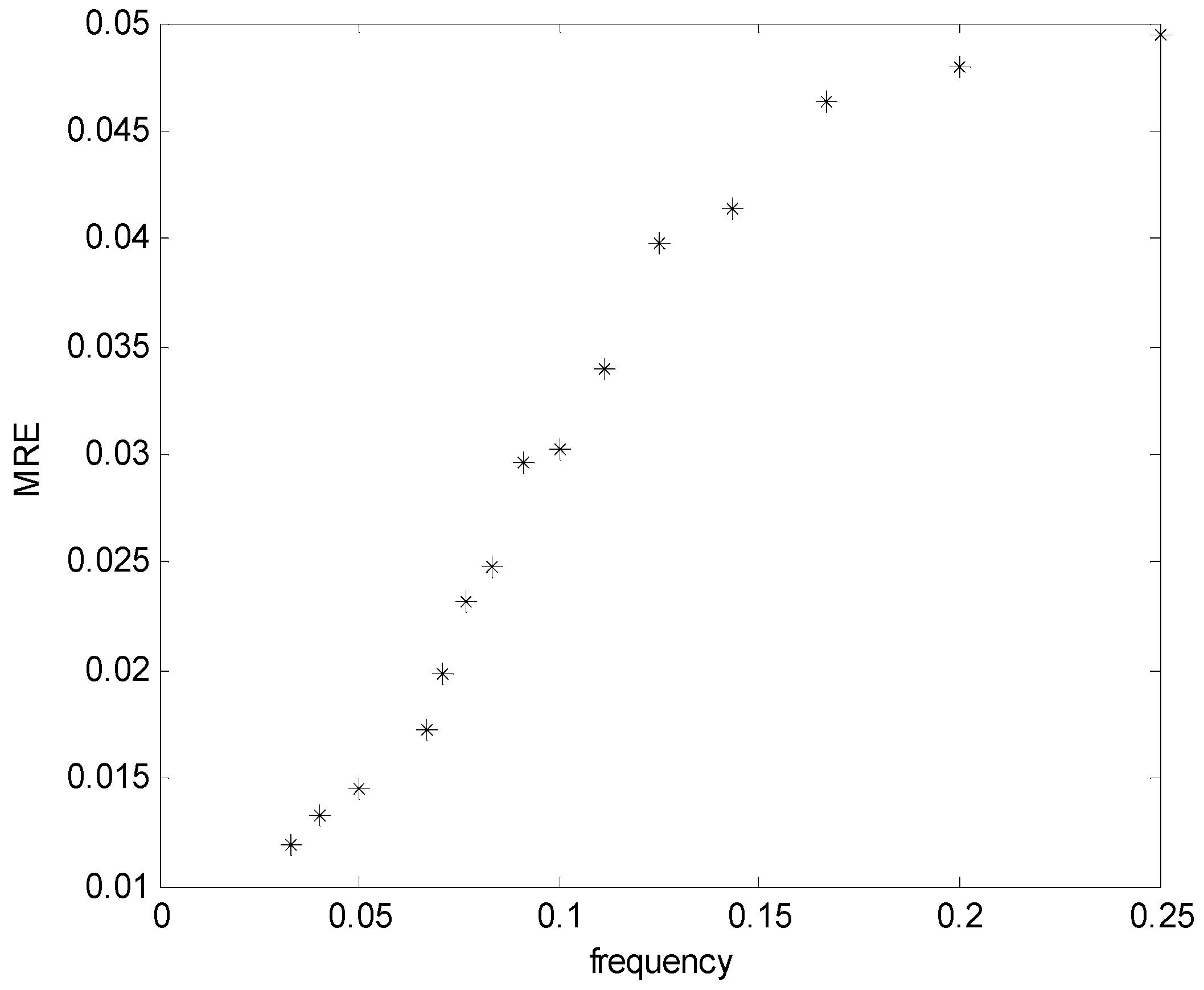
- Dynamic performance test. The 6-Degree of Freedom (DOF) simulation platform was used to carry out the test experiment of the dynamic performance of the self-contained inclinator. The rotating amplitude of the platform was set as ±3°, and multiple frequencies from 0–0.25 Hz were set to conduct sinusoidal motion. The self-contained tilt angle sensor was used to measure the motion history to obtain the measurement amplitude, as shown in Figure 10.
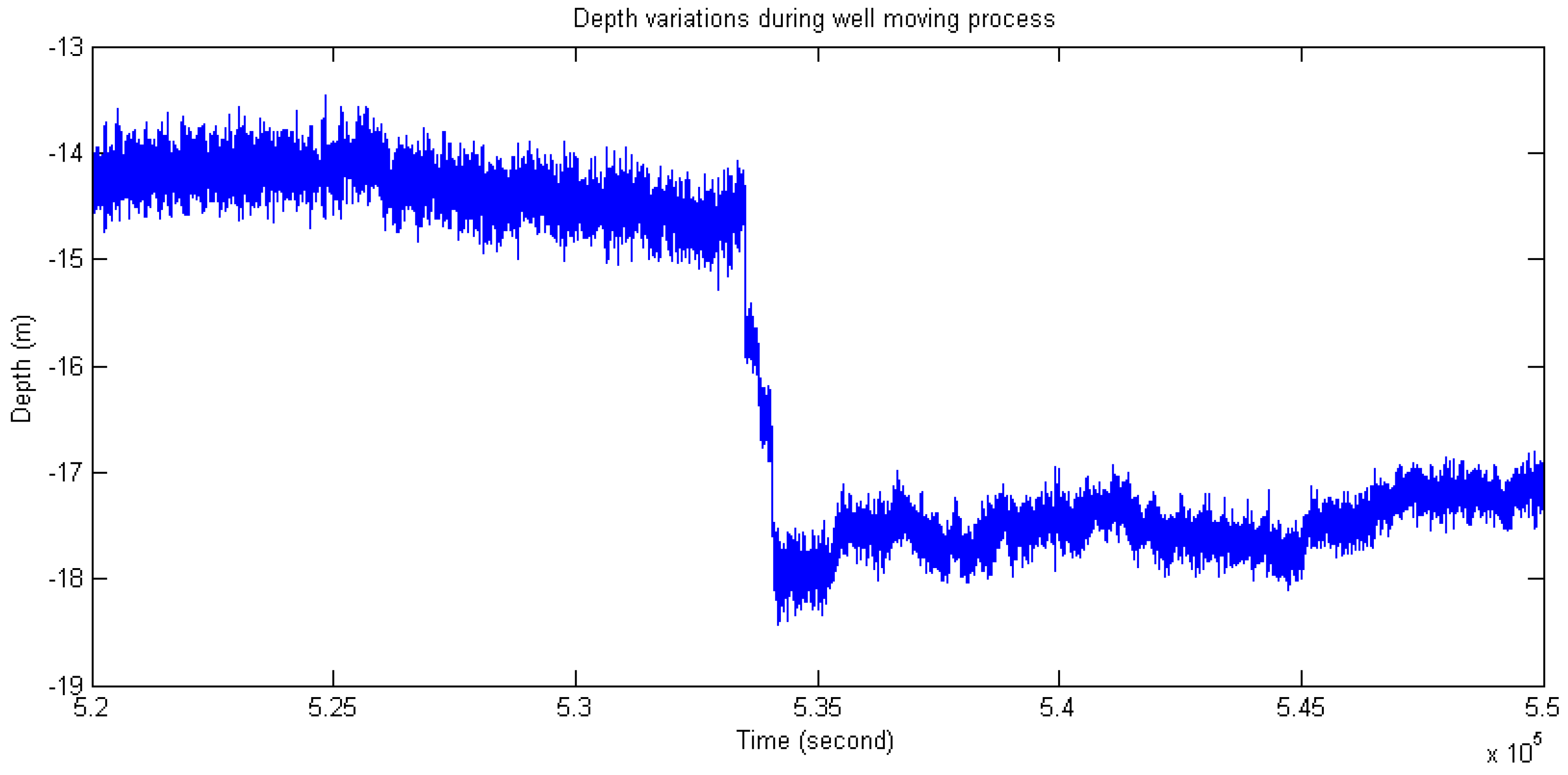
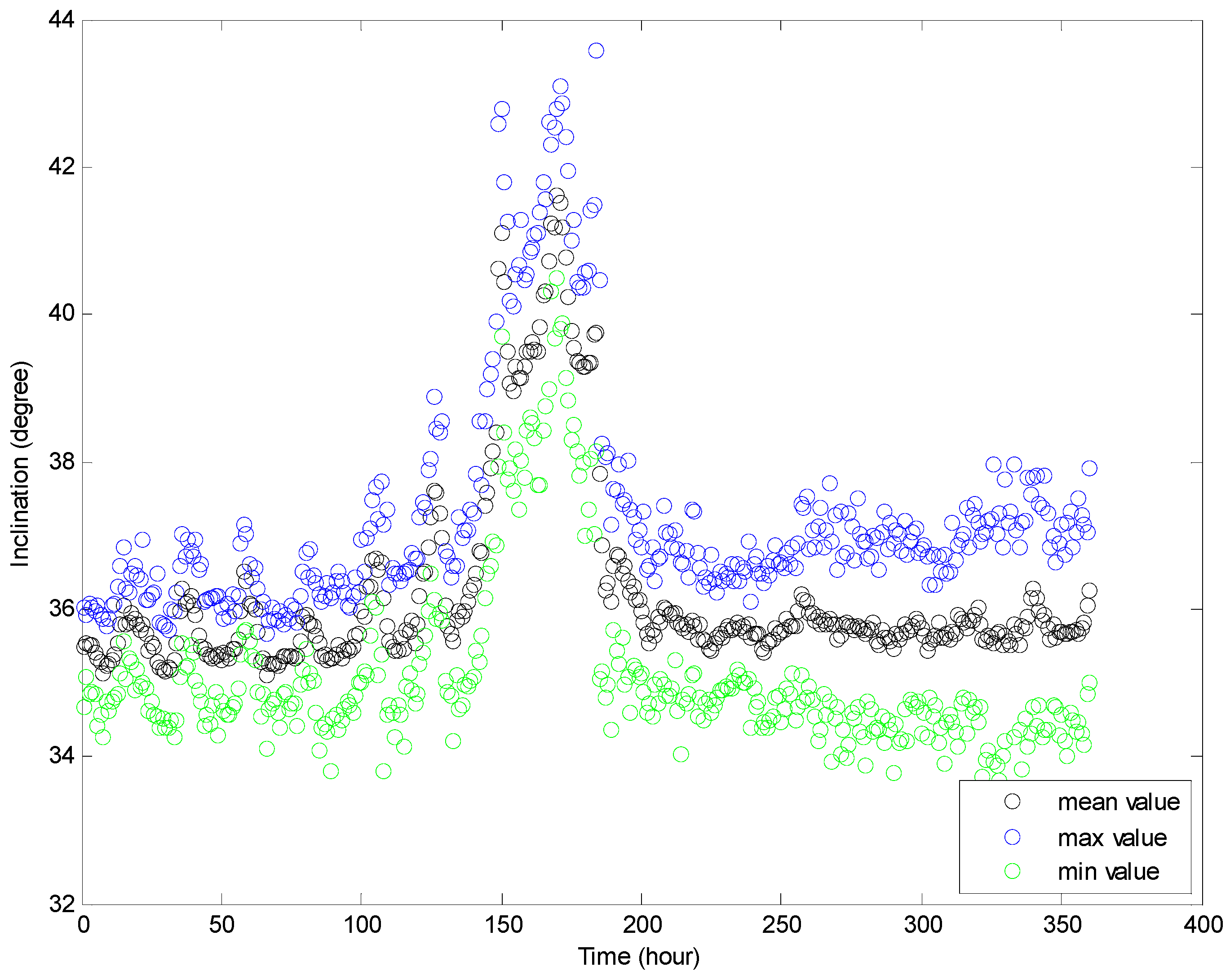
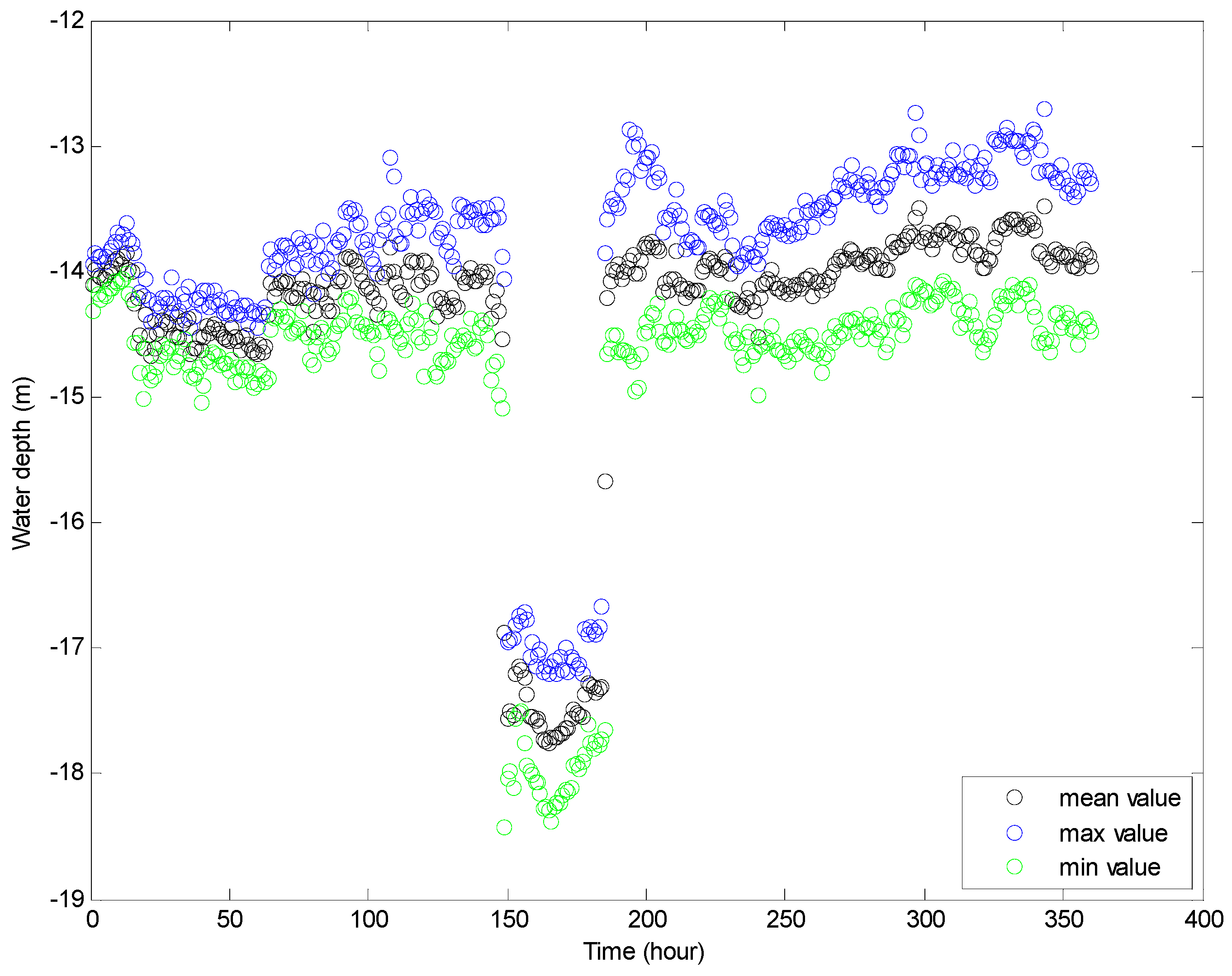
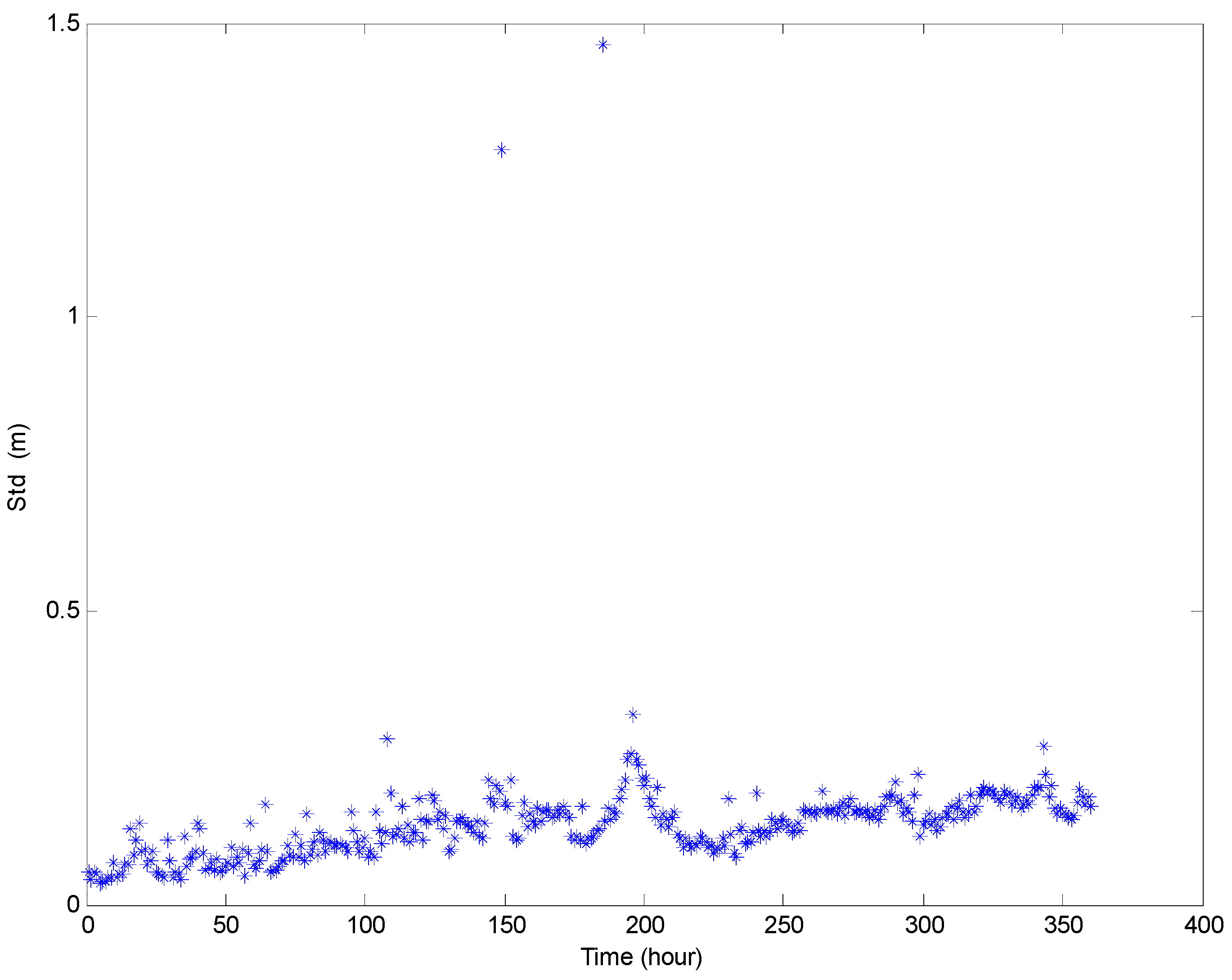
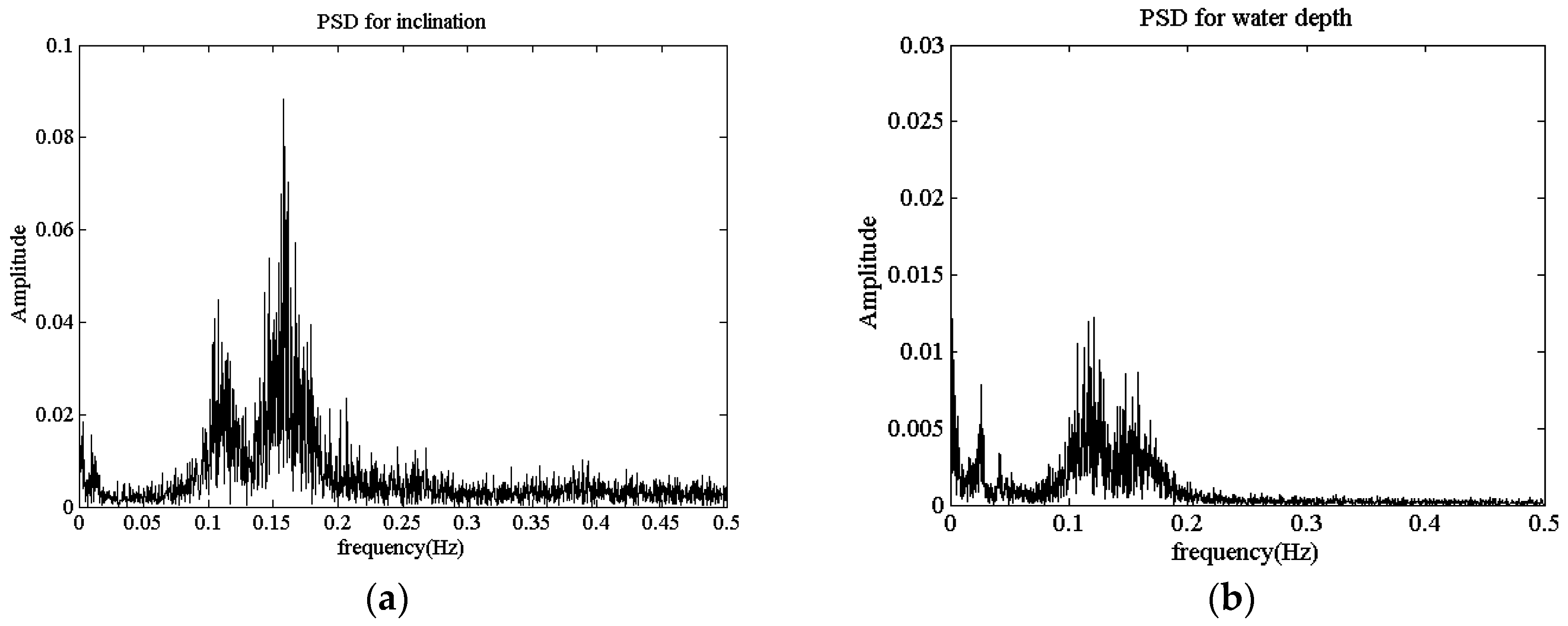
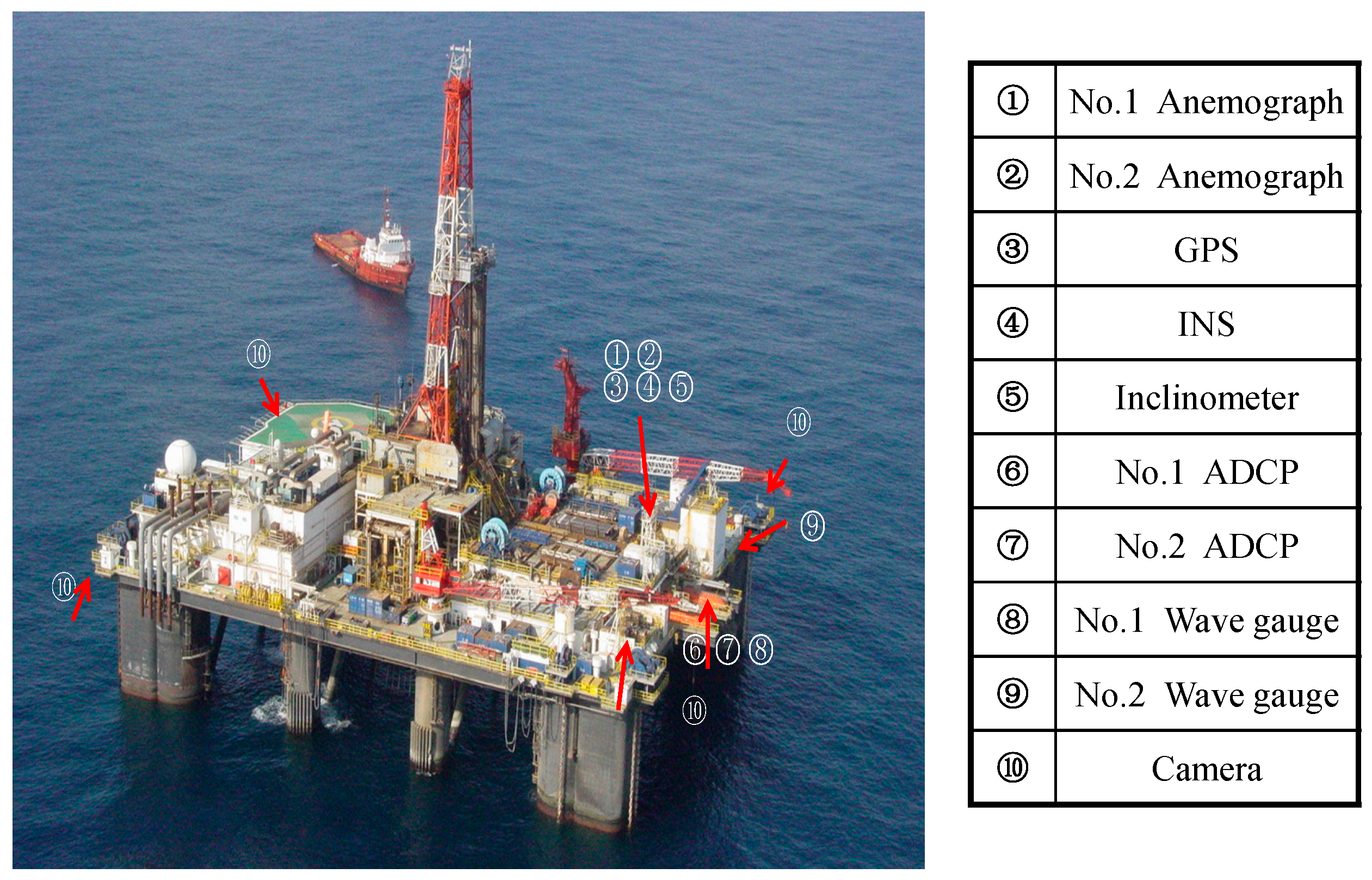
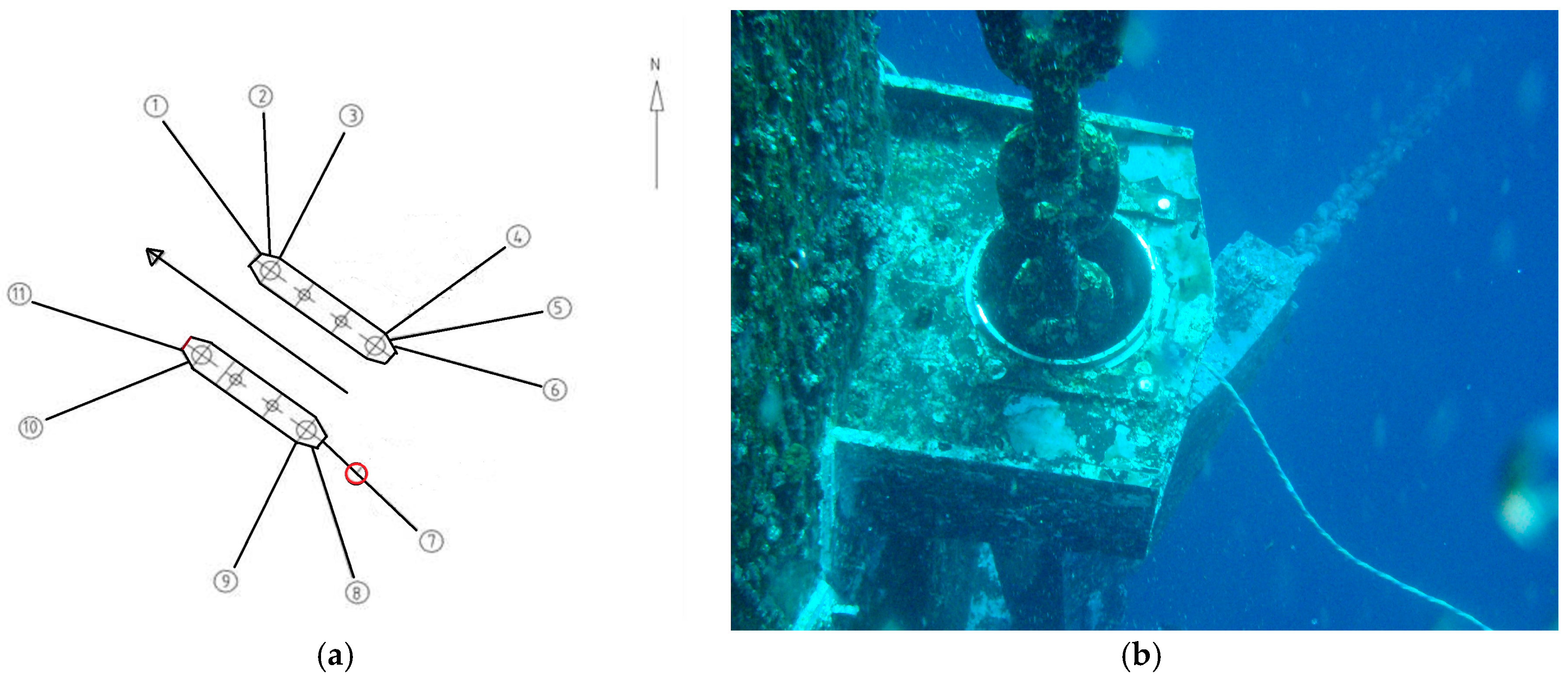
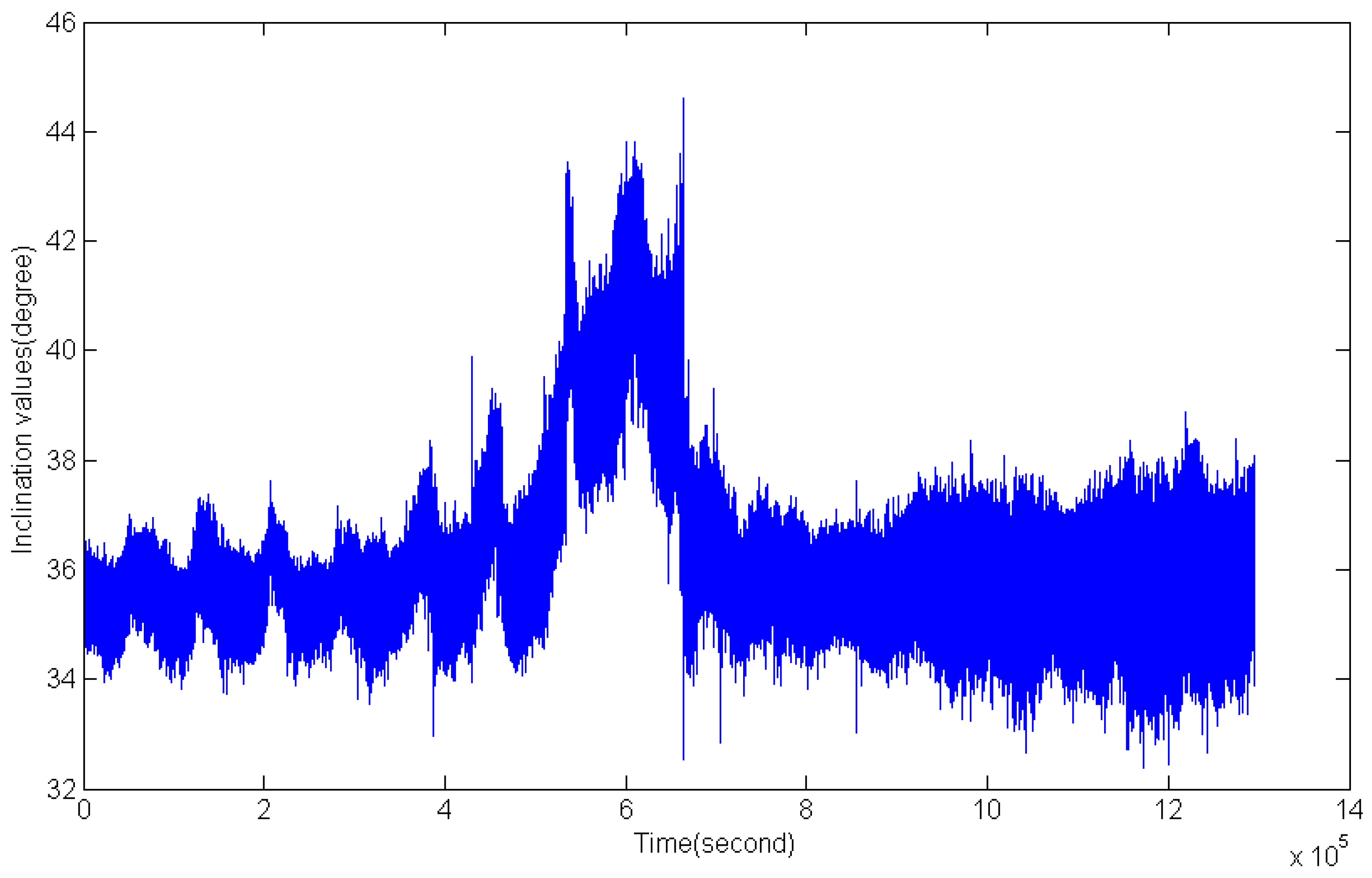
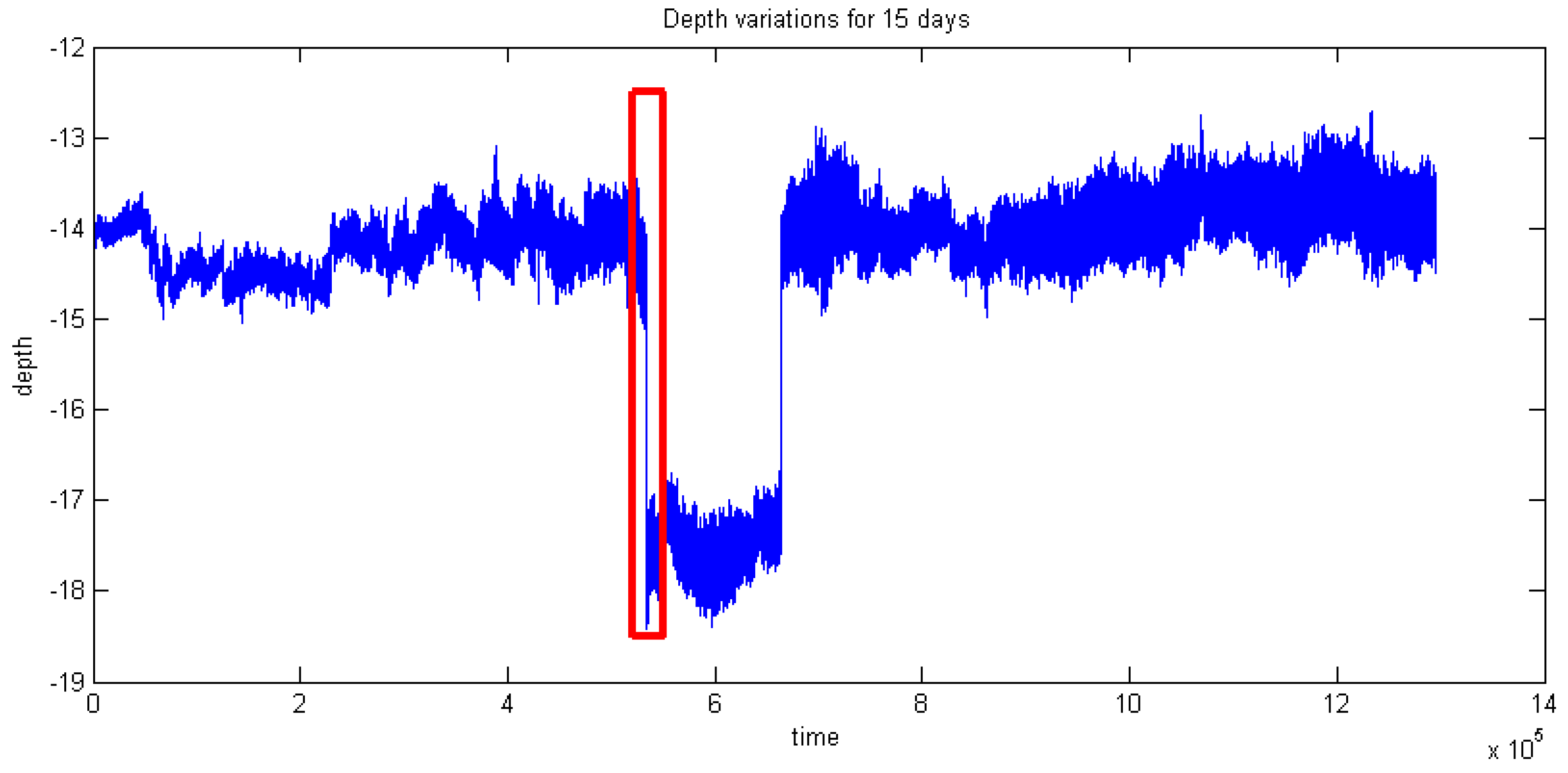
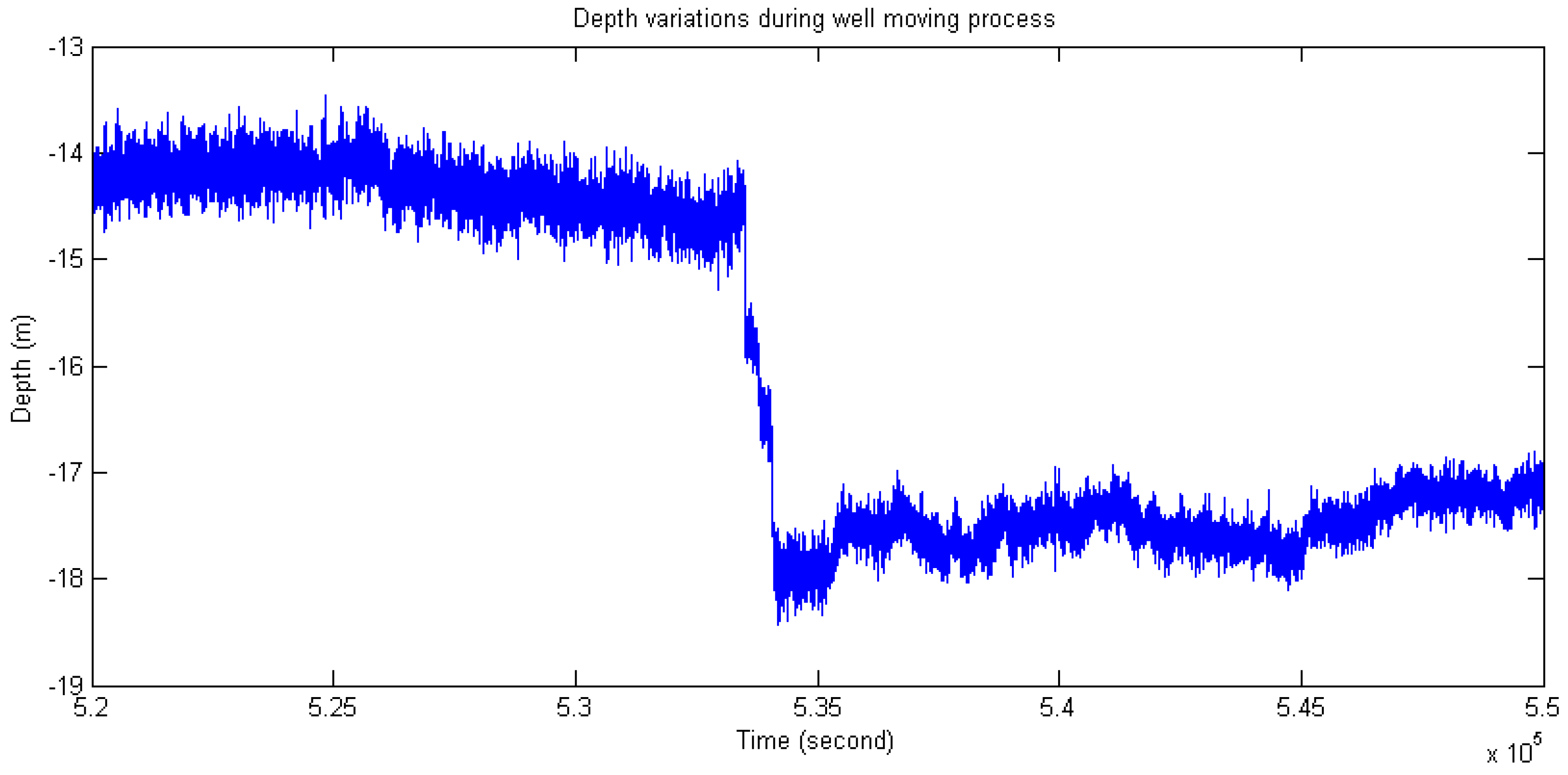
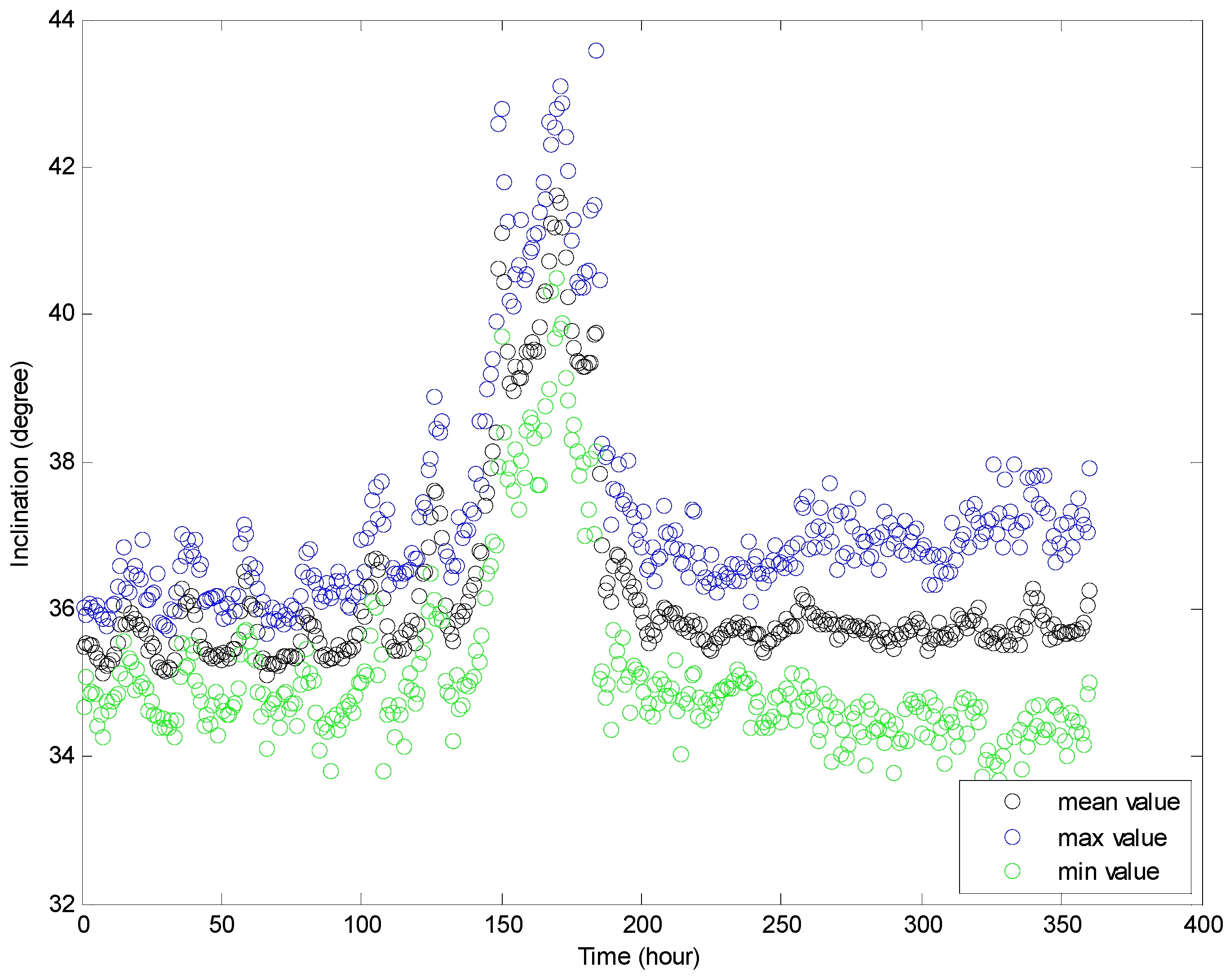
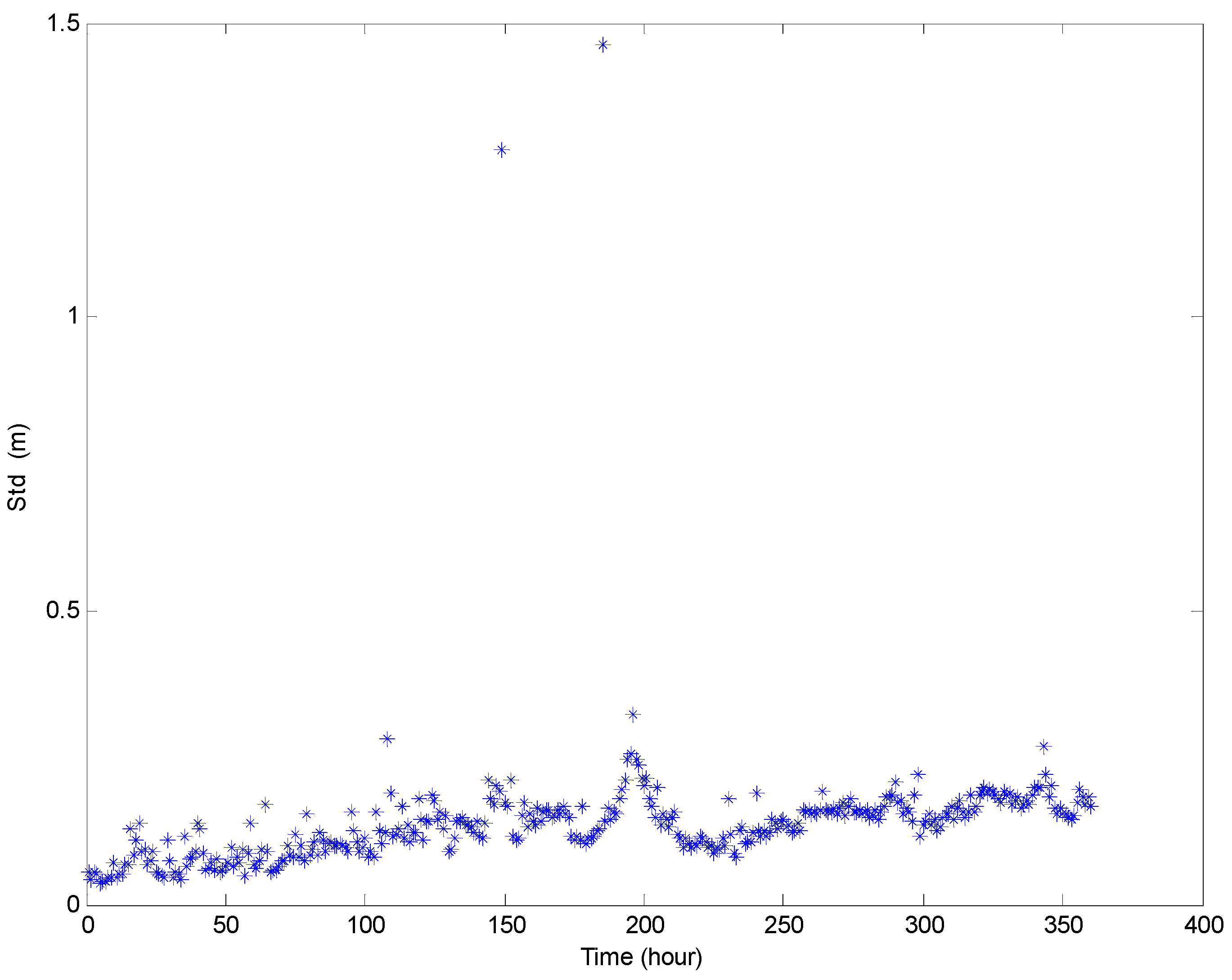
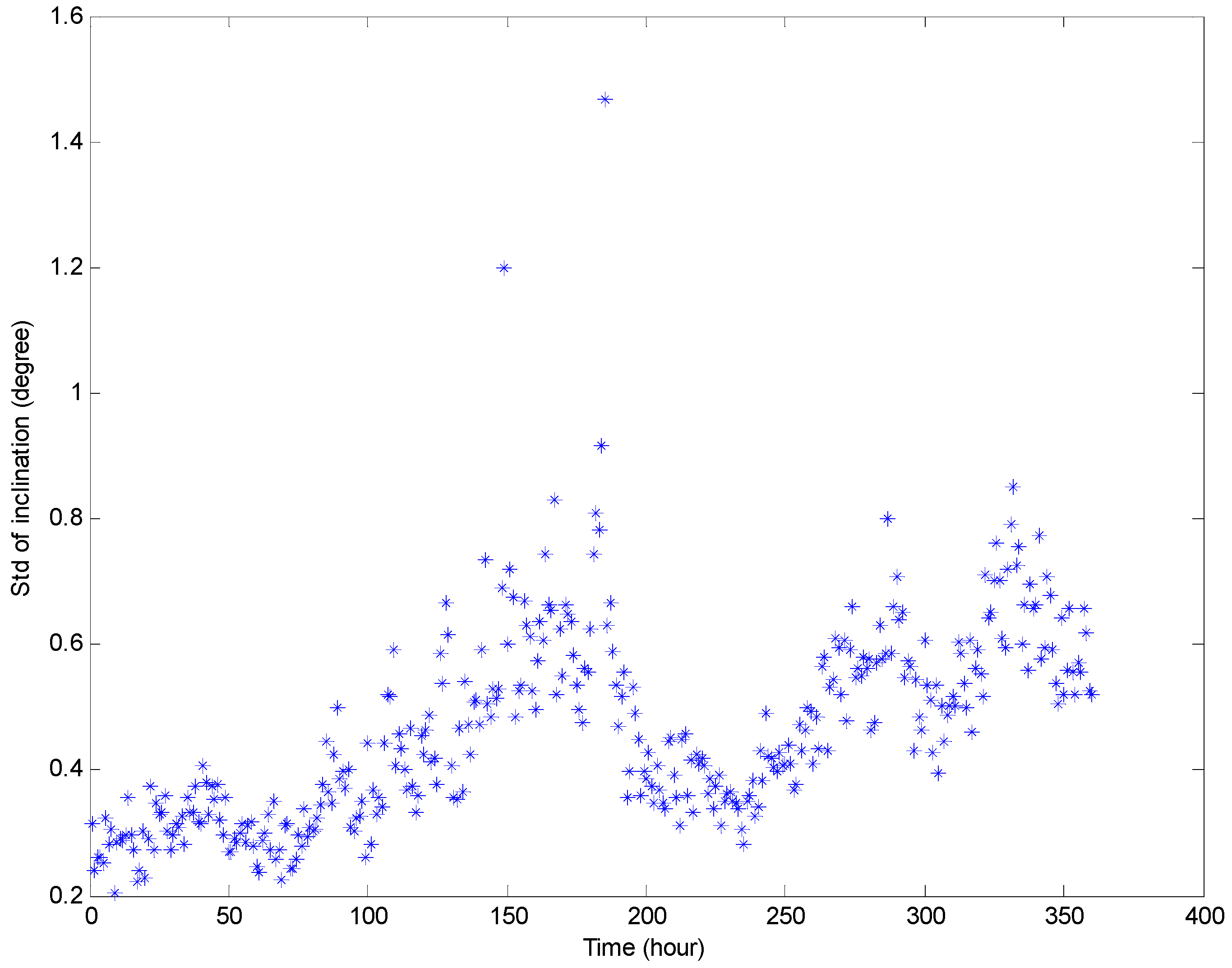
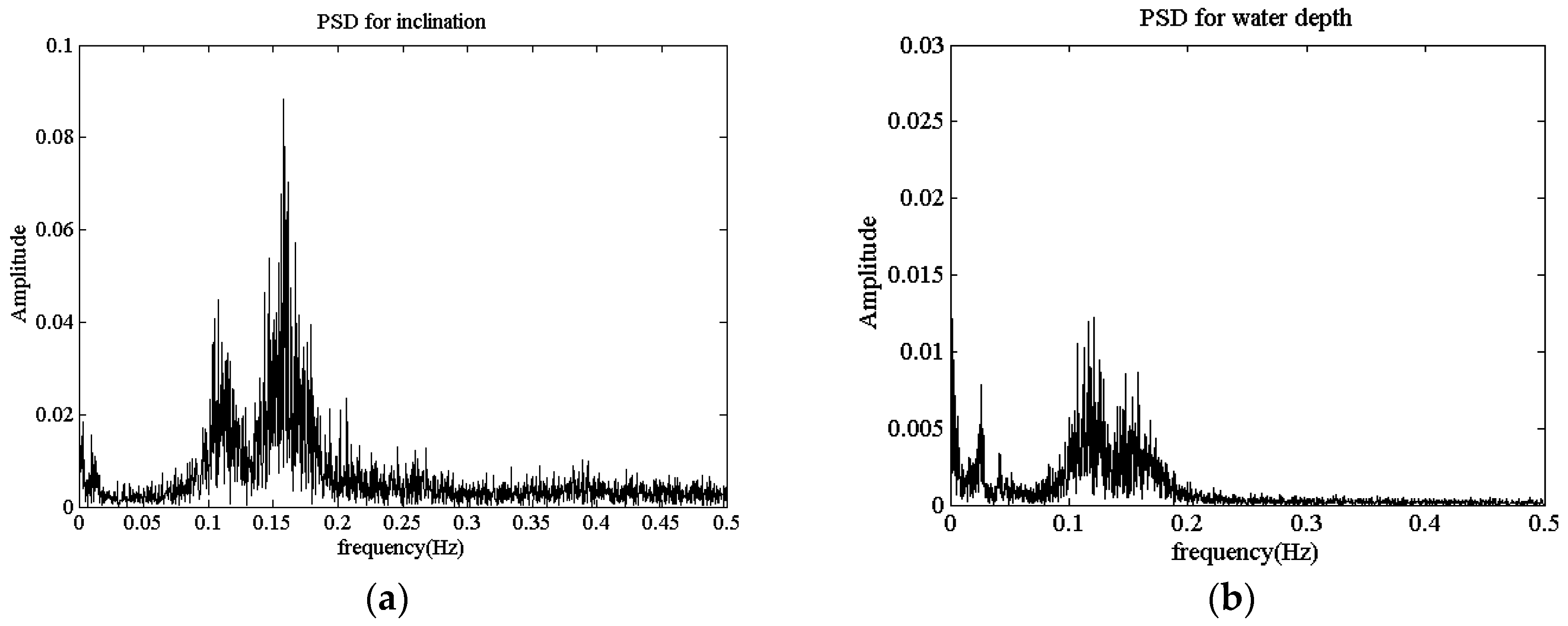
4.3. Field Test and Data Analysis
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Chakrabarti, S. Handbook of Offshore Engineering; Access Online via Elsevier: Amsterdam, The Netherlands, 2005; Volume 2. [Google Scholar]
- Buchner, B. Model test challenges for deep water floaters. In Proceedings of the 14th Annual Conference on Floating Production Systems, IBC Global Conferences Limited, London, UK, 2–3 December 1999.
- Jianmin, Y.; Longfei, X.; Sheng, Z. Hydrodynamic Model Test in Marine Engineering; Shanghai Jiao Tong University Press: Shanghai, China, 2008. [Google Scholar]
- Stansberg, C.T.; Ormberg, H.; Oritsland, O. Challenges in deep water experiments: Hybrid approach. J. Offshore Mech. Arct. Eng. 2002, 124, 90–96. [Google Scholar] [CrossRef]
- Brown, M.G.; Hall, T.D.; Marr, D.G.; English, M.; Snell, R.O. Floating production mooring integrity JIP-key findings. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 2–5 May 2005.
- FPS Mooring Integrity JIP; Report A4163; Noble Denton Europe Limited: Aberdeen, UK, 2–5 May 2005.
- Du, Y.; Wu, W.; Wang, Y.; Yue, Q. Prototype data analysis on LH11-1 semisubmersible platform in South China Sea. In Proceedings of the ASME 2014 33rd International Conference on Ocean, Offshore and Arctic Engineering, San Francisco, CA, USA, 8–13 June 2014.
- Hu, Z.; Yang, J.; Zhao, Y.; Bai, G. Full scale measurement for FPSO on motions in six-degrees of freedom and environmental loads and deduction of mooring system loads. Sci. Chin. Phys. Mech. Astronom. 2011, 54, 26–34. [Google Scholar] [CrossRef]
- Edwards, R.; Shilling, R.; Thethi, R.; Karayaka, T. BP horn mountain spar—Results of comprehensive monitoring of platform and riser responses. In Proceedings of the Deep Offshore Technology International Conference, Marseille, France, 19–21 November 2003.
- Colbourne, D.B.; Allen, J.H. Observations on motions and loads in aquaculture cages from full scale and model scale measurements. Aquac. Eng. 2001, 24, 129–148. [Google Scholar] [CrossRef]
- Irani, M.B.; Perryman, S.R.; Geyer, J.F.; von Aschwege, J.T. Marine monitoring of Gulf of Mexico deepwater floating systems. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 1–3 May 2007.
- Prislin, I.; Goldhirsh, M. Operational supports for offshore platforms: From system integrity monitoring to marine assurance and safety. In Proceedings of the ASME 2008 27th International Conference on Offshore Mechanics and Arctic Engineering, Estoril, Portugal, 15–20 June 2008.
- Van den Boom, H.; Koning, J.; Aalberts, P. Offshore monitoring: Real world data for design, engineering and operation. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 2–5 May 2005.
- Smith, D.B.; Williams, J.G. Direct measurement of large strains in synthetic fiber mooring ropes using polymeric optical fibers. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 6–9 May 2002.
- Fernández, R.; Apalkov, A.; Armada, M. Novel Robotic Platforms for the Accurate Sampling and Monitoring of Water Columns. Sensors 2016, 16, 1378. [Google Scholar] [CrossRef] [PubMed]
- Du, Y.; Wu, W.; Tang, D.; Yue, Q.; Li, F.; Xie, R. A novel underwater measurement method for mooring system using self-contained technique. Adv. Mech. Eng. 2015, 7, 1–12. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Known Variables | Variables to Be Measured | Variables to Be Solved |
|---|---|---|
| Parameter | Value |
|---|---|
| Inclination | −90°~90° |
| Water depth | 0~100 m |
| Precision of water depth | 0.1 m |
| Resolution of inclination | 0.01° |
| Resolution of water depth | 0.01 m |
| Designed life | >3 months |
| Angle Value | 0° | 0.05° | 0.1° | 0.5° | 1° | 3° | 5° | 7° | 9° |
| error | 0.001° | 0.004° | −0.003° | 0.004° | 0.007° | 0.006° | 0.009° | 0.004° | 0.008° |
| Angle Value | 0° | −0.05° | −0.1° | −0.5° | −1° | −3° | −5° | −7° | −9° |
| error | 0.001° | −0.002° | −0.002° | −0.005° | −0.006° | −0.009° | −0.005° | −0.009° | −0.010° |
| Mooring Component | Length (m) | Wet Weight (kg/m) |
|---|---|---|
| Mooring chain | 220 | 274.61 |
| Wire rope | 450 | 70.72 |
| Counterweight chain | 600 | 369.09 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, W.; Feng, J.; Xie, B.; Tang, D.; Yue, Q.; Xie, R. Development and Sensing Properties Study of Underwater Assembled Water Depth-Inclination Sensors for a Multi-Component Mooring System, Using a Self-Contained Technique. Sensors 2016, 16, 1925. https://doi.org/10.3390/s16111925
Wu W, Feng J, Xie B, Tang D, Yue Q, Xie R. Development and Sensing Properties Study of Underwater Assembled Water Depth-Inclination Sensors for a Multi-Component Mooring System, Using a Self-Contained Technique. Sensors. 2016; 16(11):1925. https://doi.org/10.3390/s16111925
Chicago/Turabian StyleWu, Wenhua, Jiaguo Feng, Bin Xie, Da Tang, Qianjin Yue, and Ribin Xie. 2016. "Development and Sensing Properties Study of Underwater Assembled Water Depth-Inclination Sensors for a Multi-Component Mooring System, Using a Self-Contained Technique" Sensors 16, no. 11: 1925. https://doi.org/10.3390/s16111925
APA StyleWu, W., Feng, J., Xie, B., Tang, D., Yue, Q., & Xie, R. (2016). Development and Sensing Properties Study of Underwater Assembled Water Depth-Inclination Sensors for a Multi-Component Mooring System, Using a Self-Contained Technique. Sensors, 16(11), 1925. https://doi.org/10.3390/s16111925