1. Introduction
High precision attitude determination is very important for many satellite missions [
1,
2]. The extended Kalman filter (EKF) has been widely used in high precision attitude determination systems consisting of star trackers and rate gyros in the past few decades [
3]. Star trackers are optical sensors which measure the angles between stars in order to determine the absolute 3-axes attitude. Star trackers typically yield accuracies an order of magnitude better than other attitude sensors such as an infrared earth sensor, sun sensor and magnetometer, etc. [
4,
5]. At present, there are mainly two kinds of star trackers, those based on charge coupled device (CCD) detectors, and those based on complementary metal oxide semiconductor (CMOS) active pixel sensor (APS) detectors [
6]. To boost the technology development of the star trackers, a new CCD based star tracker (CCD01) and a new CMOS APS based star tracker (APS01) have been loaded on the Space Technology Experiment and Climate Exploration (STECE) satellite as the test payloads.
STECE, a small satellite mission developed by China, was launched into a dusk–dawn sun-synchronous orbit on 20 November 2011. Its altitude is about 790 km and its orbit inclination is about 98.4°. The predicted life time of STECE is two years (it is still in orbit by now). The STECE satellite uses the earth-oriented 3-axes stabilized attitude determination and control mode, i.e., maintains a fixed-pointing to the earth with its z-axis. Besides the CCD01 and APS01 star trackers, STECE also carries an ASTRO 10 star tracker (CCD based) [
7] which is from Jena-Optronik GmbH as the attitude and orbit control system (AOCS) sensor. In addition, STECE carries two fiber optic gyros (FOG) and a dual-frequency GPS receiver. The three star trackers are aligned with their field of view opposite to the direction of the sun. The installation Euler angle of the ASTRO 10 is [13.74° 115.74° 26.41°] in the “3-1-2” sequence (i.e., the yaw–roll–pitch sequence, is used in the whole study), the relative installation Euler angle of CCD01 and APS01 relative to ASTRO 10 is [130.45° −173.81° −48.11°] and [31.29° 81.54° 43.89°], respectively. The boresights of the three star trackers are their own z-axis, respectively. The field of view (FOV) of the CCD01 and APS01 are 20° × 20° and 18° × 18° square, respectively. During the mission, the CCD01 and APS01 provide 10 Hz and 8 Hz quaternion data (represented by [
q0 q1 q2 q3]
T, a four element vector with
q0 as scalar part and
q1,
q,
q3 as vector part, which satisfies
).
In the EKF, the star tracker measurement error is generally considered to be Gaussian white noise [
8]. However, the measurement of the star tracker contains several error sources which include bias, low frequency errors (LFE) [
9,
10] and noise. The bias is characterized by a fix offset between the measurement reference frame and the mechanical reference frame. The LFE are errors that vary periodically with the satellite orbit and are of systematic nature. Possible sources of LFE are the thermal effects and changing FOV [
11,
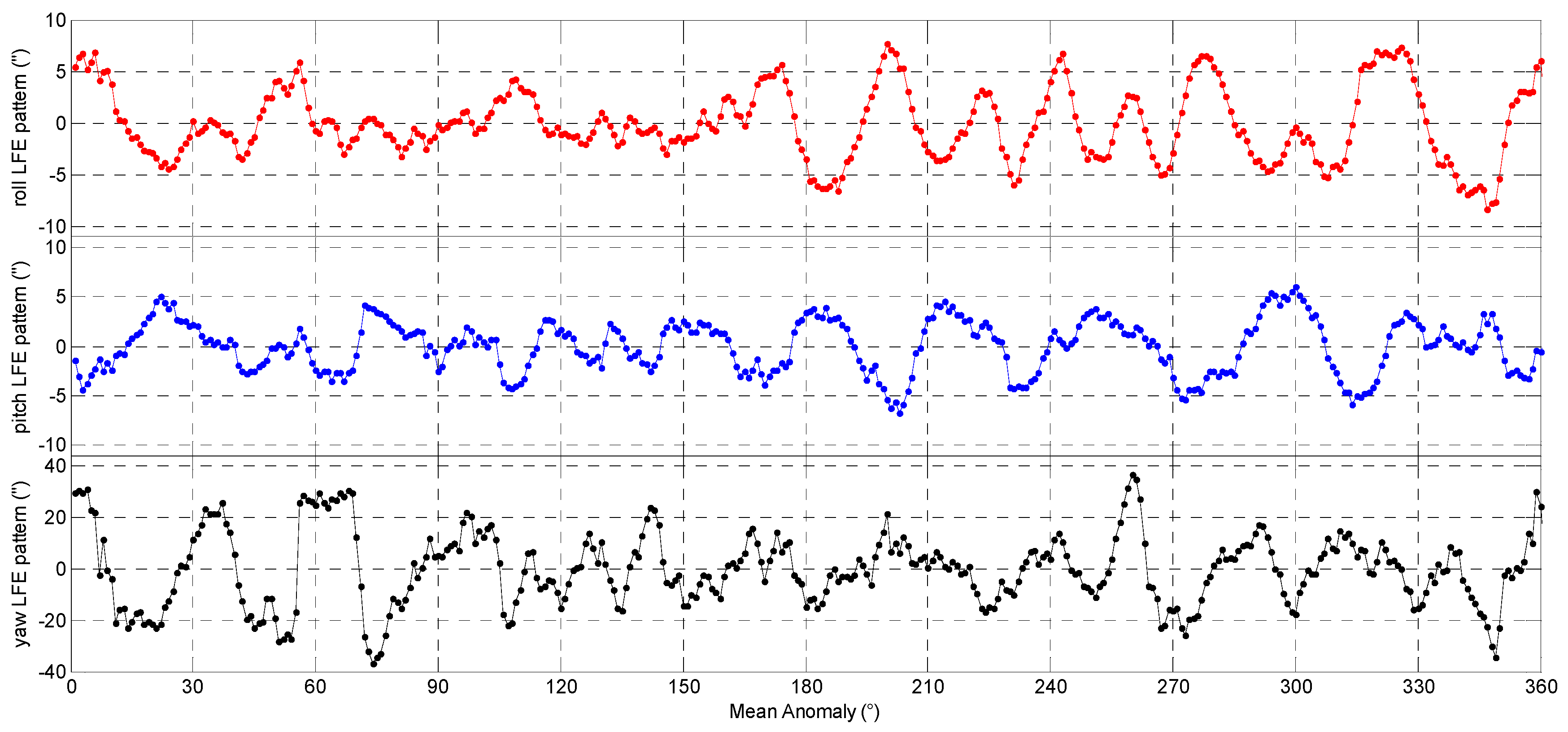
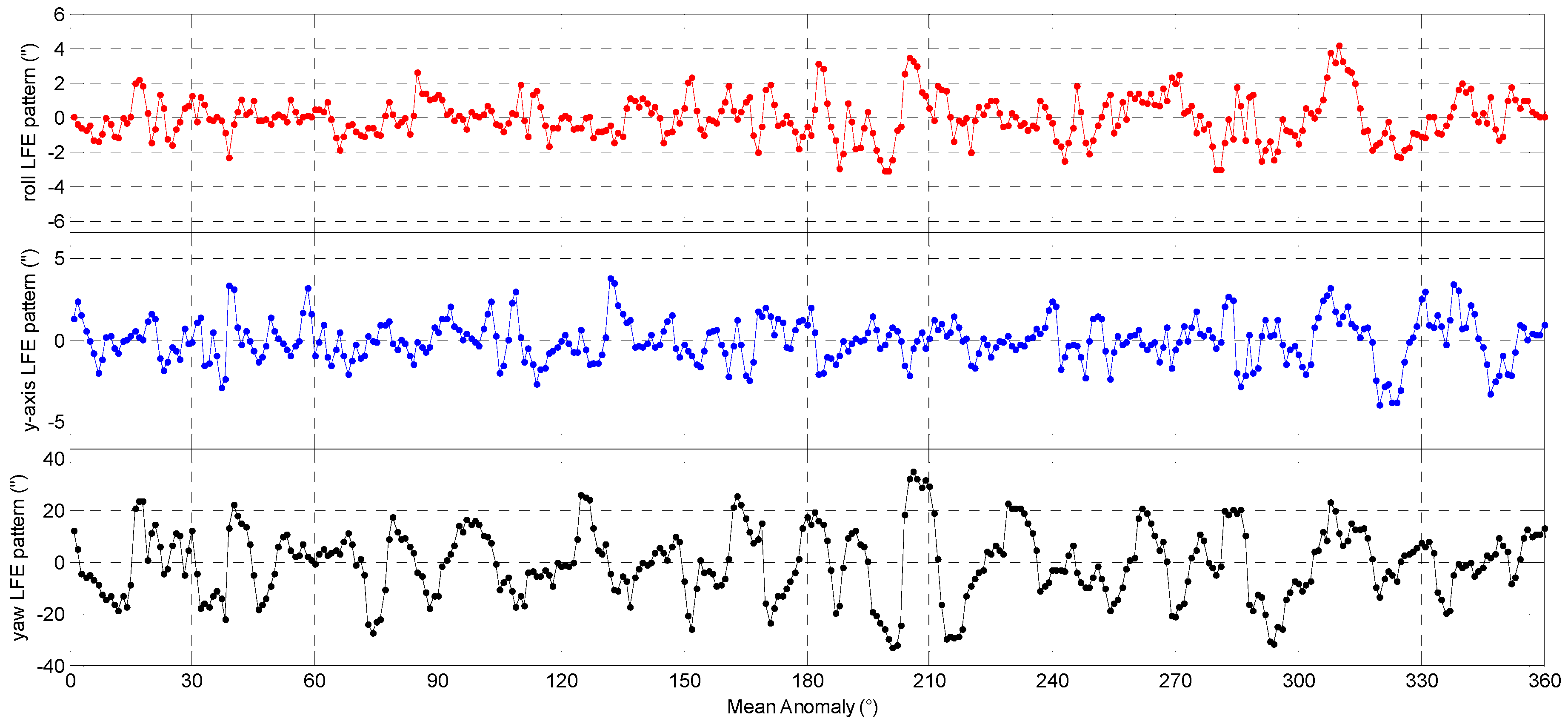
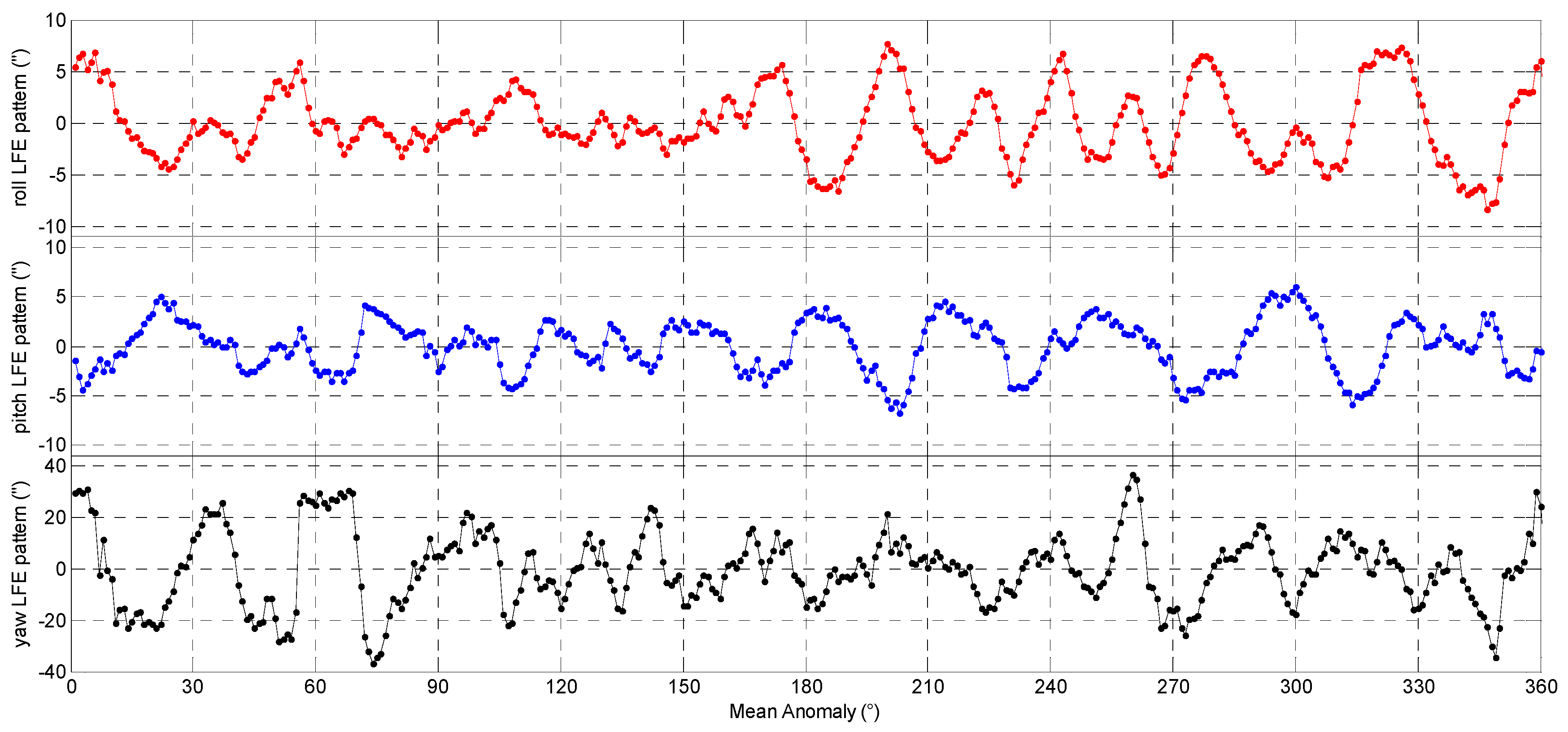
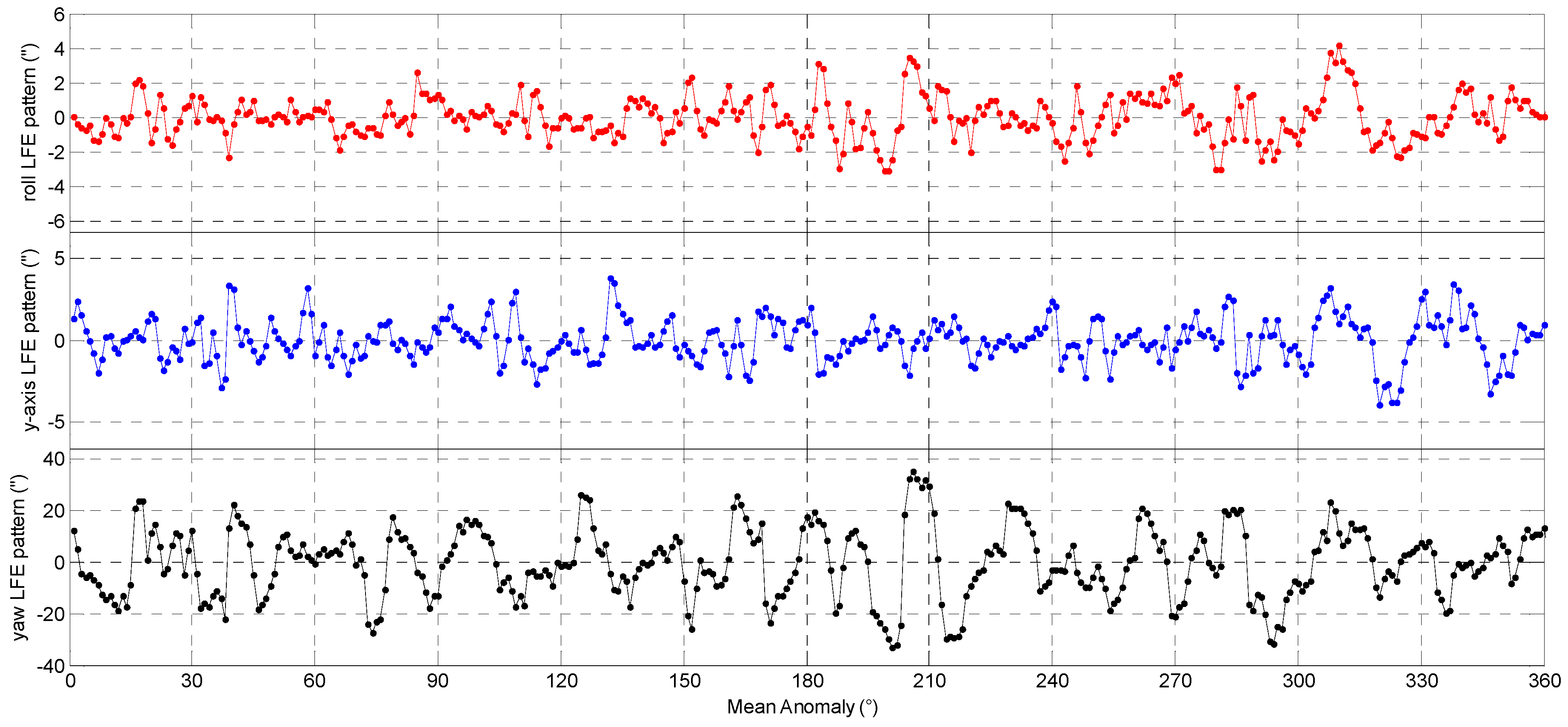
12]. As the satellite flies along the orbit, the sun irradiation angle varies periodically. Thereby the thermal effect on the satellite platform is not uniform, and this will cause thermal deformation on the optical head and the alignment structure of the star tracker, which yields pointing change of the boresight. In addition, the star tracker’s FOV varies periodically along with the orbit, which causes the number and brightness of the tracked stars to change periodically. Consequently, the star tracker error will fluctuate dynamically.
Generally, the bias can be eliminated by in-flight calibration algorithms and the noise can be smoothed by filter algorithms [
10]. However, the LFE is difficult to eliminate by the in-flight calibration algorithms and also cannot be smoothed by filter algorithms [
13,
14]. As a consequence, the LFE are one of the most penalizing errors for high accuracy satellite attitude determination. Due to the presence of the LFE, the assumption of Gaussian white noise for star tracker measurement is not appropriate and the performance of the attitude determination EKF is no longer optimal.
Two kinds of approaches have been investigated to mitigate the effect of LFE over the past decade. One approach comes from hardware modifications [
10,
15], which includes optimizing the thermal–mechanical design, choosing appropriate materials and controlling on-orbital temperature, etc. Another approach comes from error calibration at the measurement level [
13,
14,
16]. In these LFE calibration methods, the LFE are essentially estimated by using the measurement of the gyro. However, the performance of these methods depends on the precision of the gyro closely. The LFE estimation result may be contaminated by the gyro drift and gyro noise.
In this paper, we analyze the LFE of the CCD01 and APS01 star trackers, and propose a novel approach for star tracker LFE extraction and compensation based solely on their attitude measurements.
2. Methodology
The main difficulty in the star tracker LFE extraction and compensation is that we don’t have the true attitude of the satellite. So we need to create a reference attitude quaternion which represents the true attitude as accurately as possible. For this purpose, Schmidt et al. [
9] use a fifth degree polynomial to fit the measured quaternions over a time period of 2000 s to acquire the reference quaternions. However, the fit function model of the measured quaternions is unknown, so the selection of the polynomial degree may be subjective and rough. Additionally, according to our experience with real data, the polynomial method is only suitable for fitting the data of a short period. When the attitude data set is long (e.g., several consecutive satellite revolutions), selecting an appropriate polynomial degree is difficult, because the star tracker LFE vary periodically with the satellite orbit (as we demonstrate later in this article), and we need to analyze the attitude data for several consecutive satellite revolutions. Under the condition that the fit function model is unknown and there is a long period of data to analyze, the Vondrak filter may be an appropriate method due to its superior performance [
17,
18,
19]. As for additional benefit, The Vondrak filter relies only on the observed data and the filter values at the two ends of the data series can be calculated. It can expediently and reasonably smooth the data serials by choosing a factor to control its level of smoothing. In this paper, we will use a Fourier analysis combined with a Vondrak filter to fit the star tracker measured quaternion data to obtain the reference quaternion data. For convenience of reference, we will name the Fourier analysis method combined with the Vondrak filter as the FAVF method.
For a series of observational data (
),
, where
is the measurement epochs and
is the measurements. The filter values of the Vondrak filter are derived by satisfying the following condition:
where
denotes the degree of filtering and
denotes the smoothness of the smoothed curve. The definitions of
and
are as follows:
where
is the filter value;
is the weight of measurements;
is the smoothed curve expressed in terms of
and
the third numerical derivatives of the smoothed curve which is calculated based on a cubic Lagrange polynomial;
,
. The coefficient
is a positive coefficient that controls the degree of compromise between the two extreme possibilities: if
,
and
, the result is a smooth parabola and the operation is called absolute smoothing. If
,
, then the solution is simply
and the operation is called absolute fitting. Here
is called the smoothing factor.
How to choose the smoothing factor
ε is the key issue in using the Vondrak filter. A general way is to select the smoothing factor by trial and error. In some cases, the smoothing factor chosen by this way can also meet the needs of the data processing, though it is not the optimal one. A more rigorous way is using the cross-validation method [
20,
21,
22] to find the optimal smoothing factor. The basic concept of the cross-validation method is to divide the observation data into two parts: the filtering series and the validation series. The filtering series is used to generate the filtered results (the smoothed curve) and the validation series is used to cross-validate the filtered results. First, the observation data (
) is randomly divided into the filtering part (
,
),
, and the validation (
,
),
part. Here the filtering sample size
is much larger than the validation sample size
in order to maintain the low-frequency signals in the observation data and not to degrade the resolution. Second, for a given smoothing factor
, the smoothed curve
can be obtained based on the filtering part (
,
). Then, the variance of the validation series relative to the filter values can be calculated by
where
denotes the
mth division of the measurement. For each smoothing factor
, suppose that the measurement data is randomly sampled for
M times, then
M variances
can be obtained and the mean of them is acquired by
Finally, the optimum smoothing factor is the one that makes the smallest.
When using the cross-validation method to find the optimum smoothing factor of the Vondrak filter, the L different alternative smoothing factors () are used to determine the magnitude (supposed as ) of the smoothing factor first. Then compare the different smoothing factors (usually will be enough) to find the optimum smoothing factor.
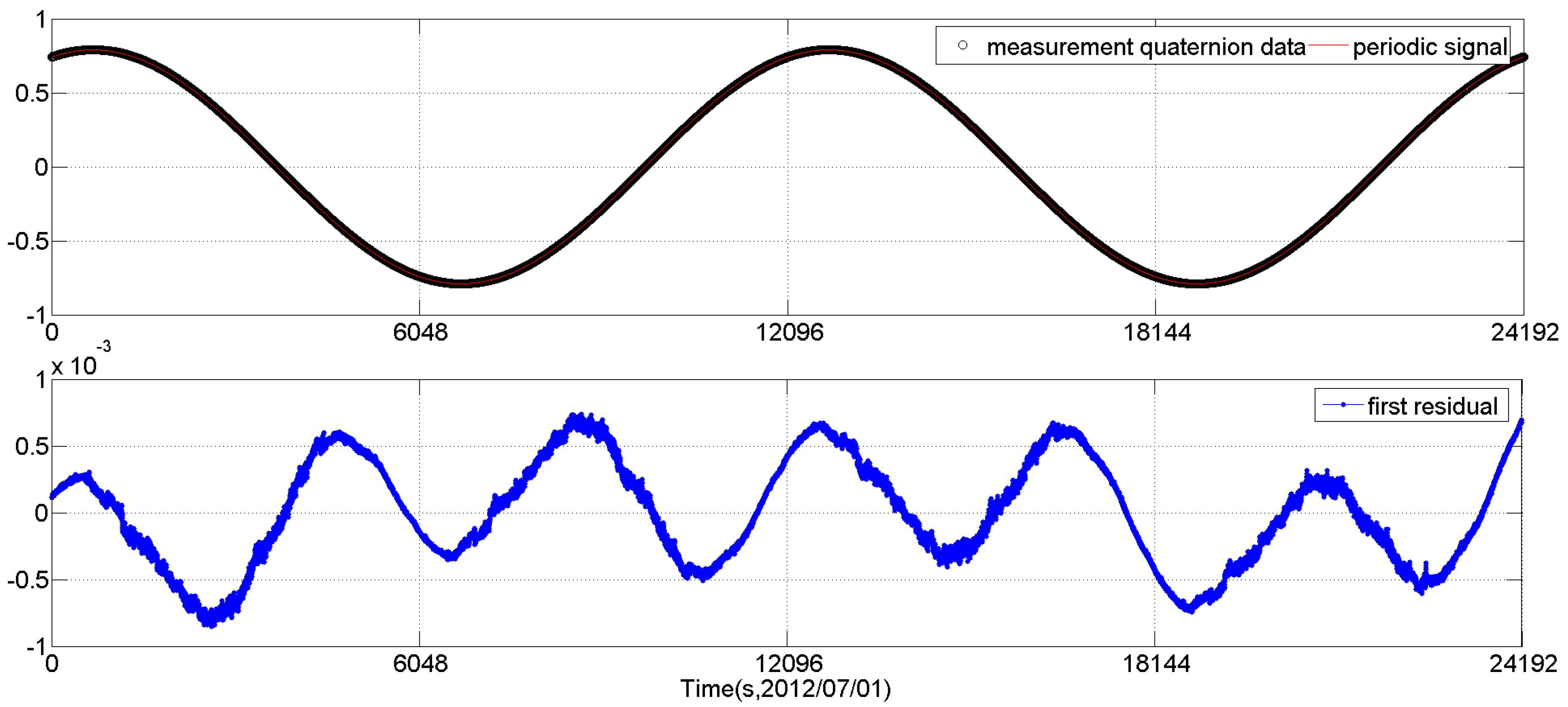
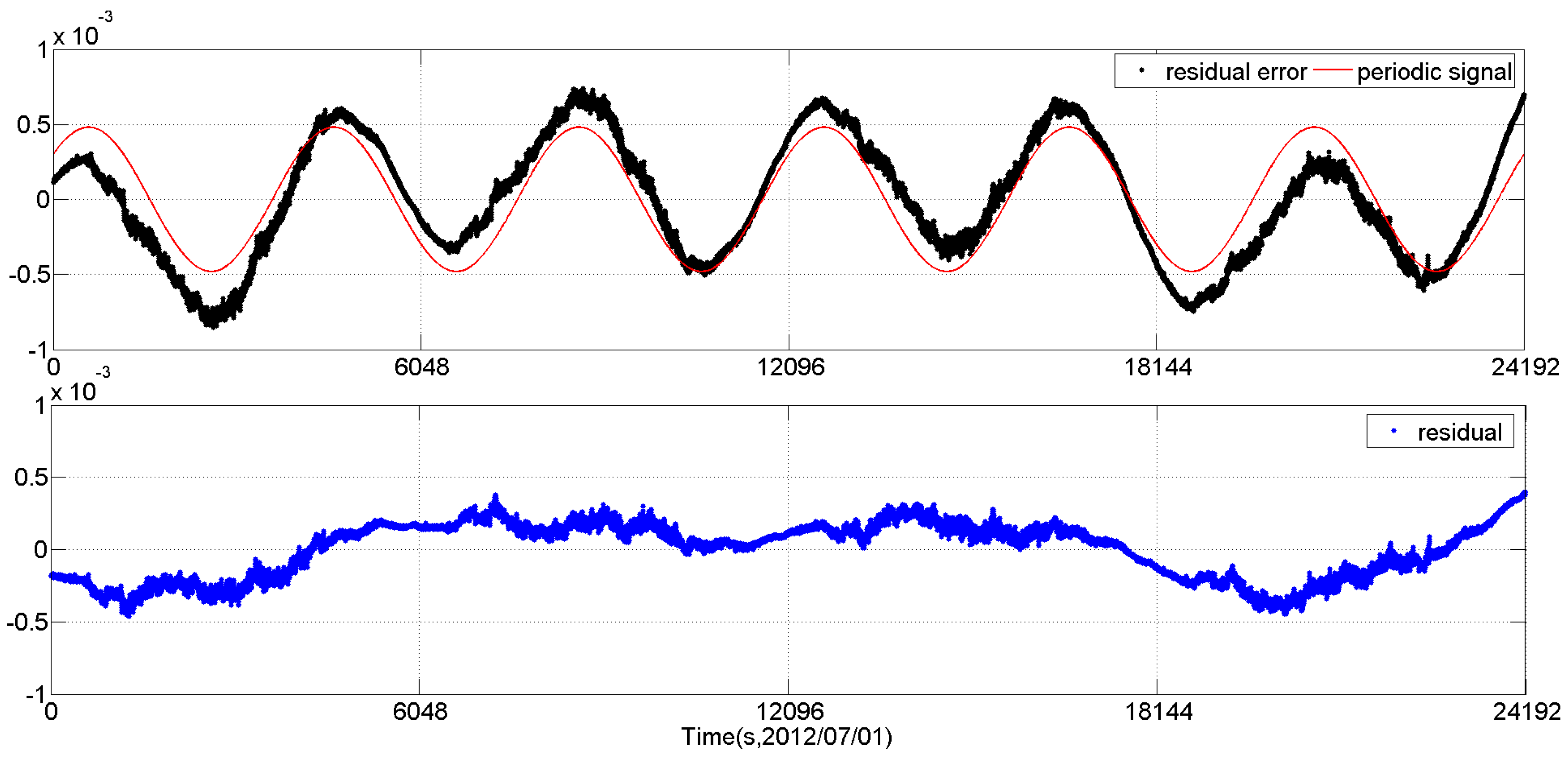
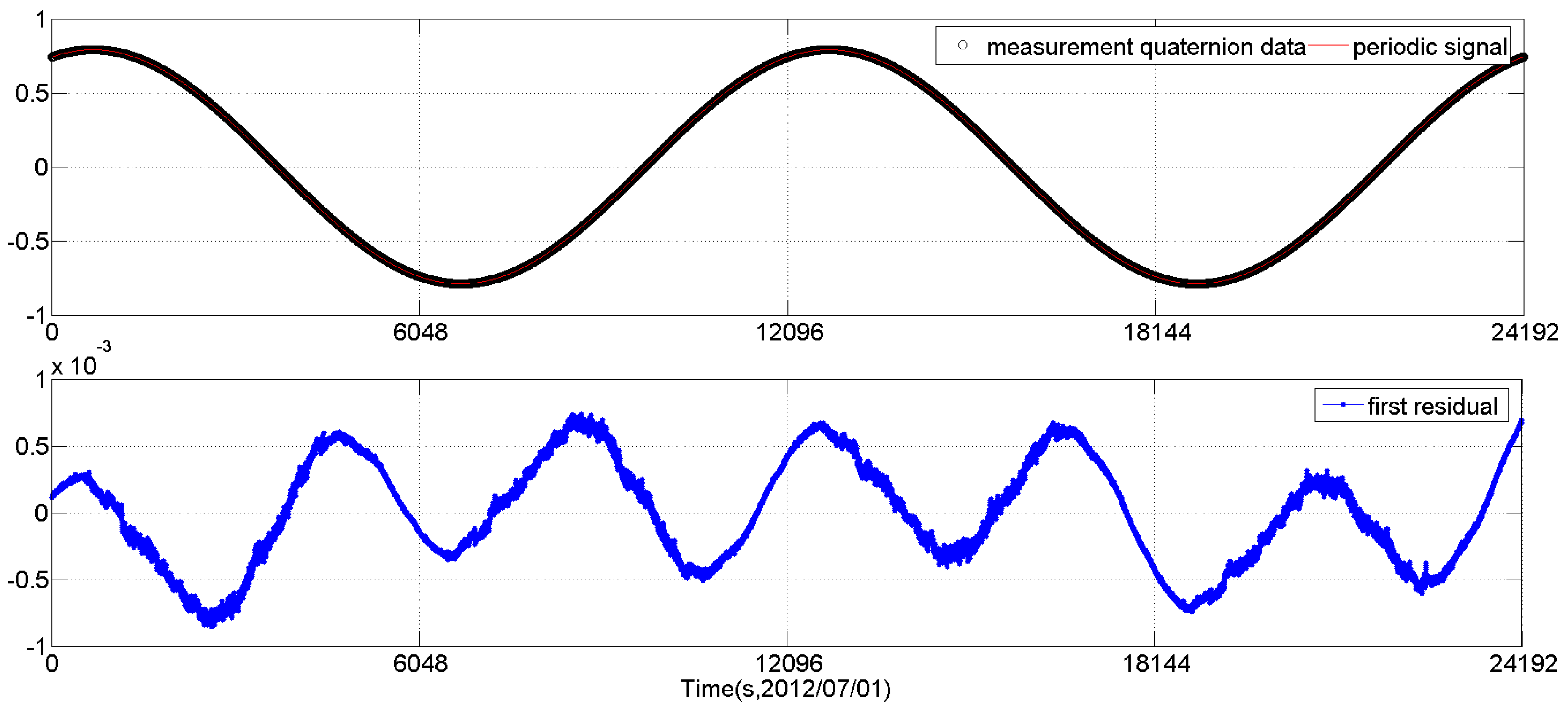
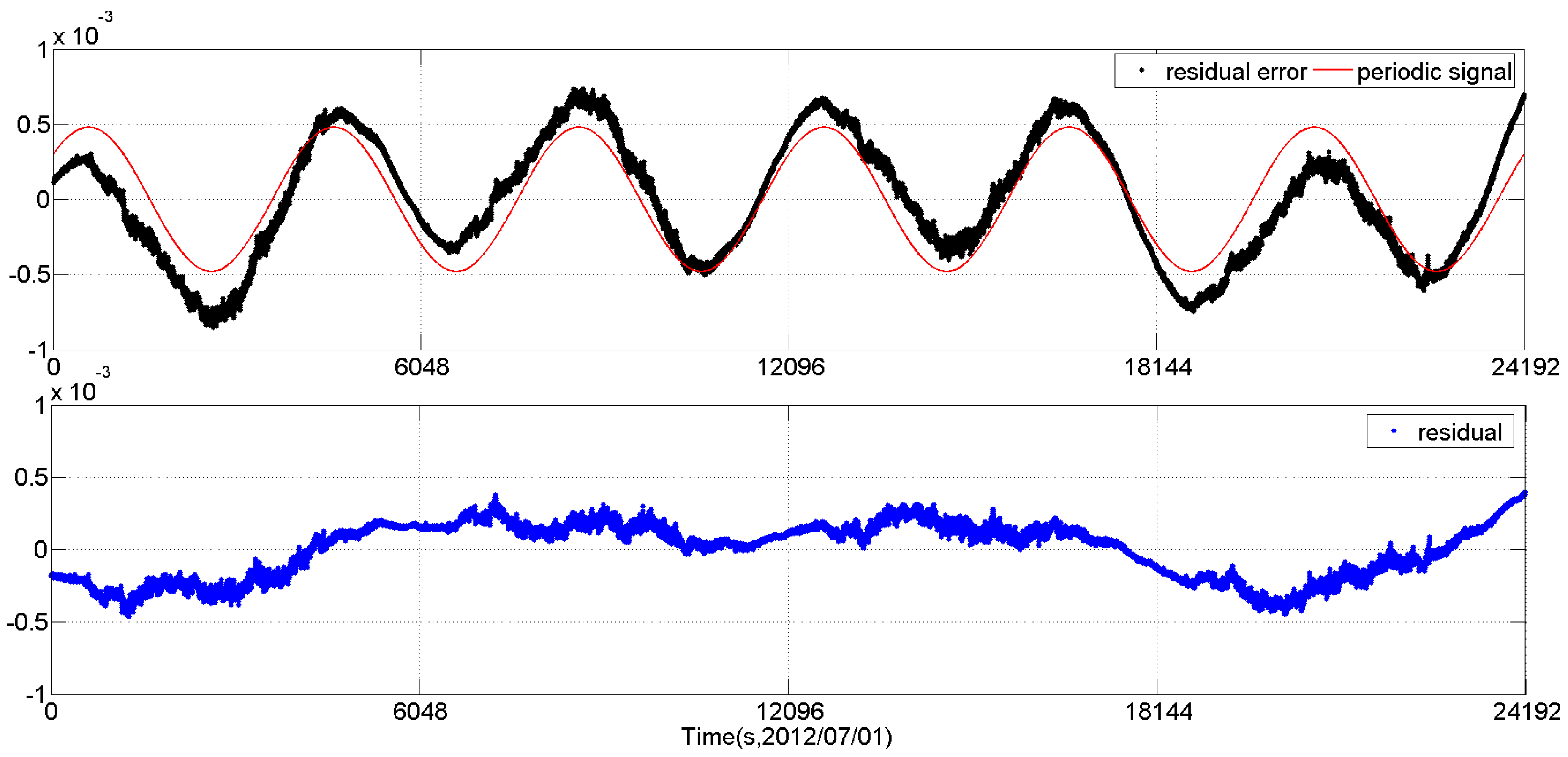
Because the STECE satellite maintains an Earth-fixed pointing with its z-axis directed towards nadir, as the satellite flies along the orbit, the attitude quaternion measured by the star tracker varies as a sinusoidal wave with a period equal to the orbital period. Therefore, to make the Vondrak filter better fit the quaternion data, we will use the Fourier analysis to extract the large periodic signals of the quaternion data in the FAVF method firstly. Considering that the measured quaternion data are discrete, the periods provided by the Fourier analysis are rough and need to be further adjusted. In this study, the optimal period of the periodic signal with the largest amplitude will be searched around the max period (corresponding to the signal with the largest amplitude) provided by the Fourier analysis. The optimal period will be determined by a performance criterion defined in Equation (7). Then the period signal with the optimal period will be removed from the data. The residuals will be analyzed again by the Fourier analysis to check if there are still periodic signals. The Fourier analysis may be carried out several times until the periodic signal of the residuals becomes negligible.
Let
(
,
) be the
k periodic signals extracted by the Fourier method of the
elements of the measured quaternion
(
). Here
is the period of the corresponding periodic signals,
is the size of the data set. Let
be the corresponding residual, then we have:
The period
is determined by the following performance criterion
where
is the max period provided by the
k times Fourier analysis,
is defined as:
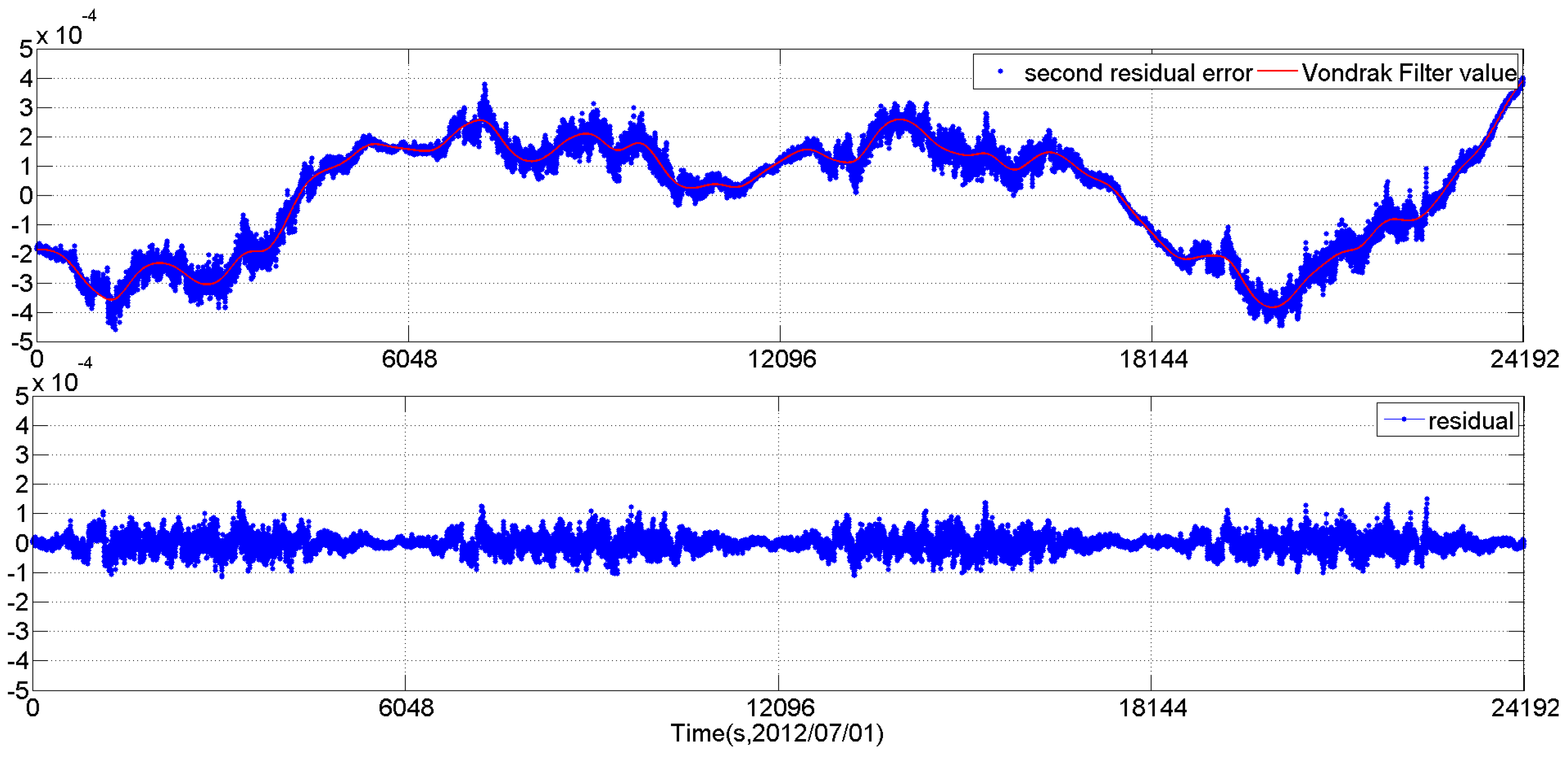
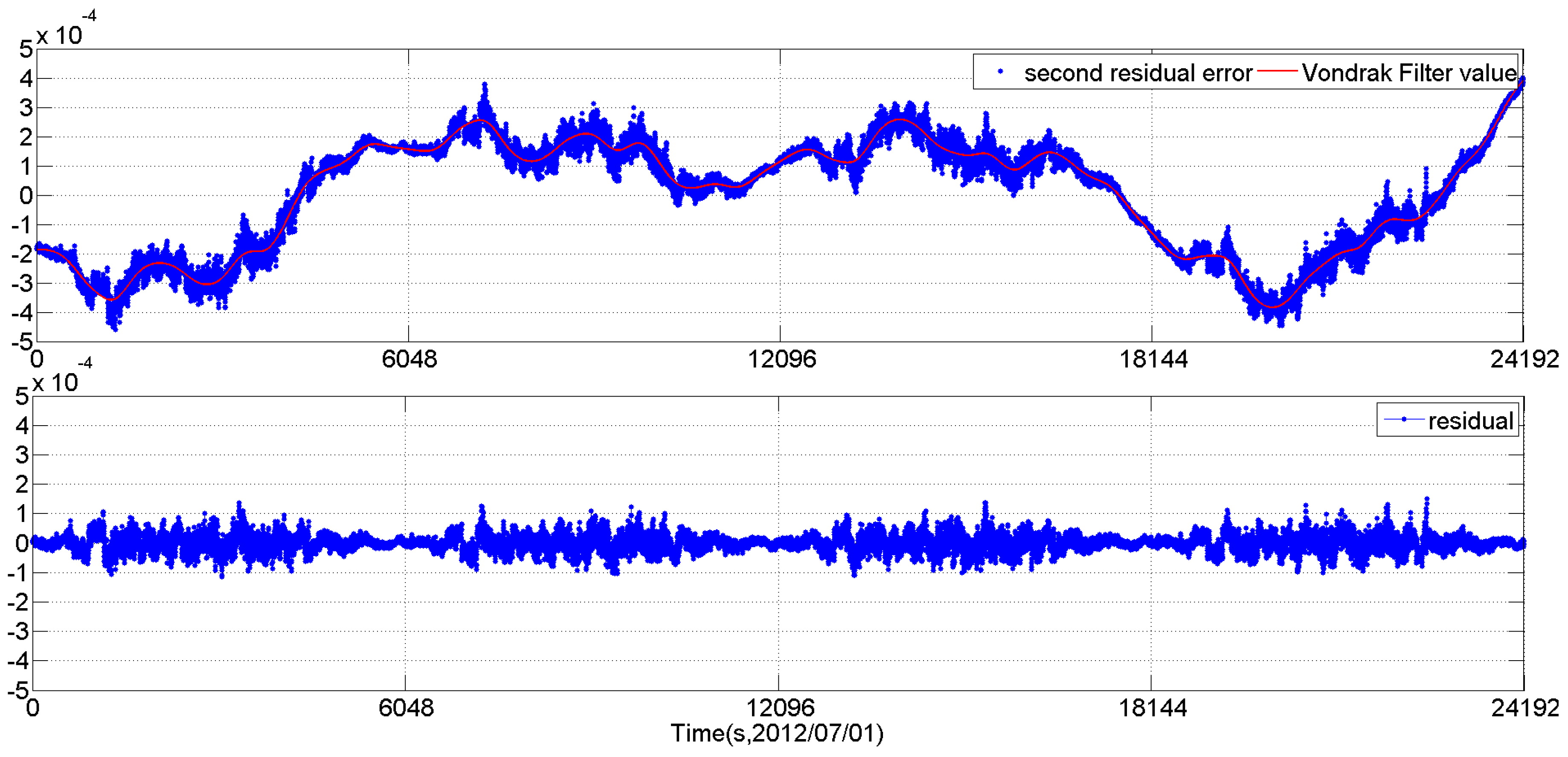
When the main periodic signals of the quaternion data have been extracted, the residual
will be fitted by the Vondrak filter. Let
be the Vondrak filter fit value of
, and
be the residual error of the Vondrak filter, then we have:
where
is the smoothing factor of the Vondrak filter.
According to Equations (6) and (9), the final fit value of the
elements is:
Finally, the reference quaternion
is acquired by
When the reference quaternion
is obtained, we can compute the residual quaternions between the reference quaternion
and the measured quaternion
at the epochs
:
where
is the inverse quaternion of
, defined as
. The operator
is quaternion multiplication defined as [
23]:
With
,
.
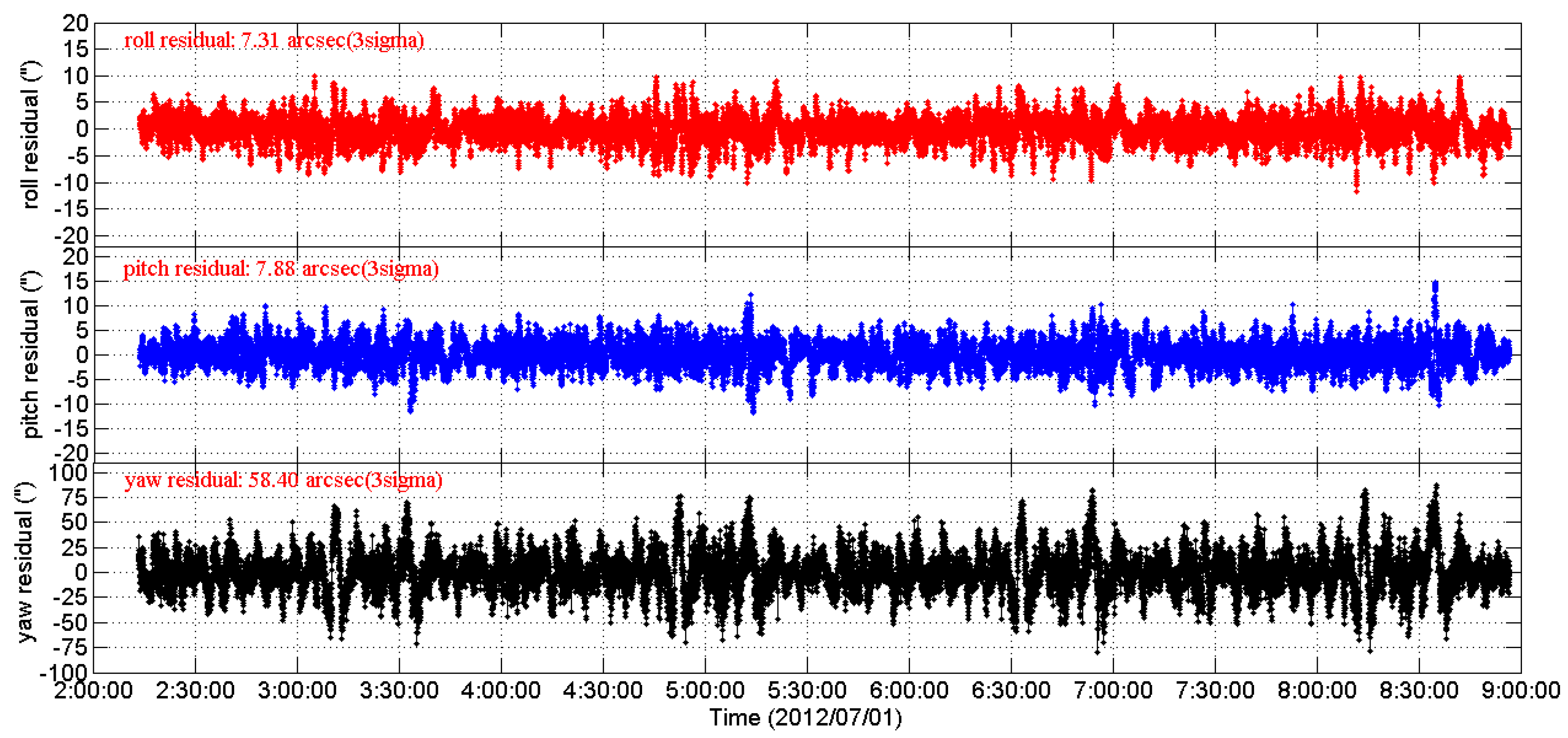
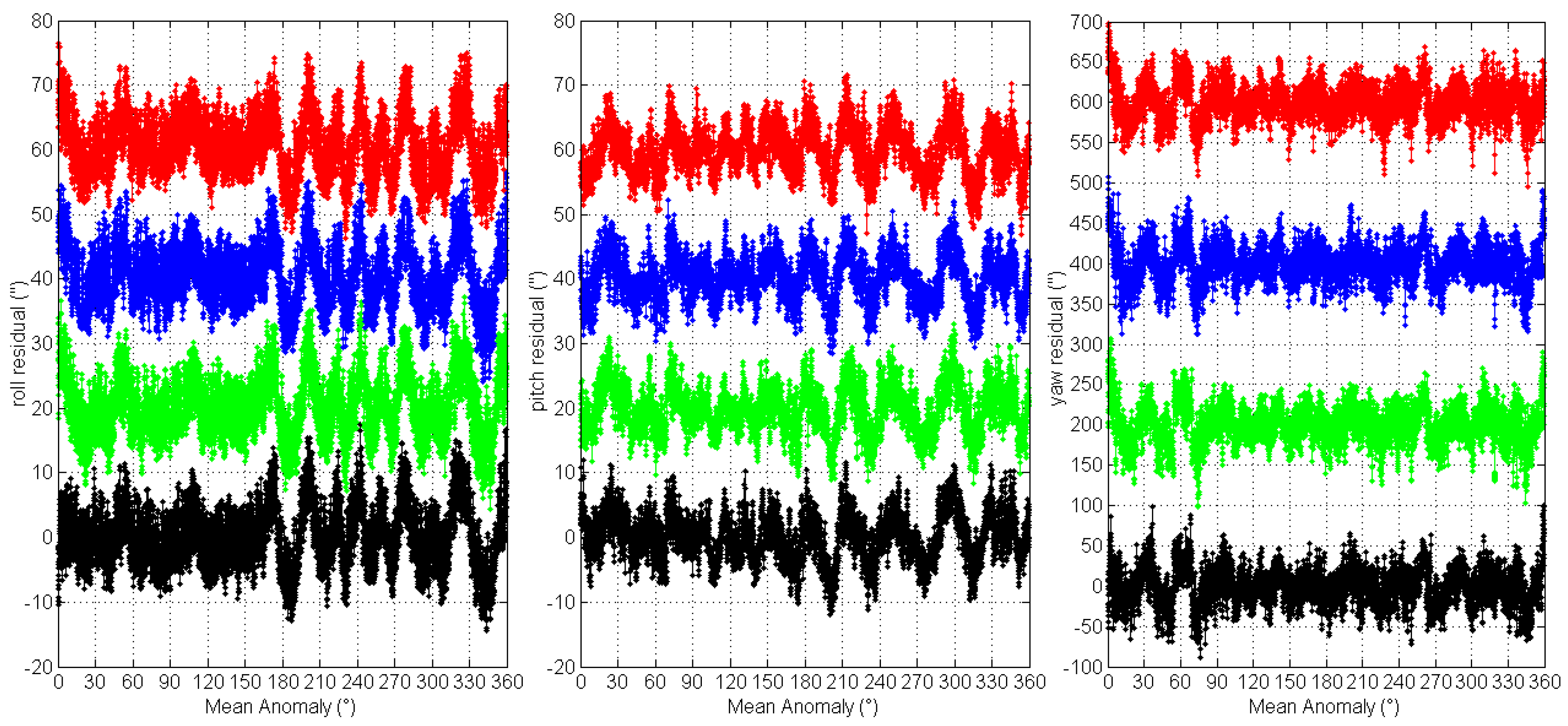
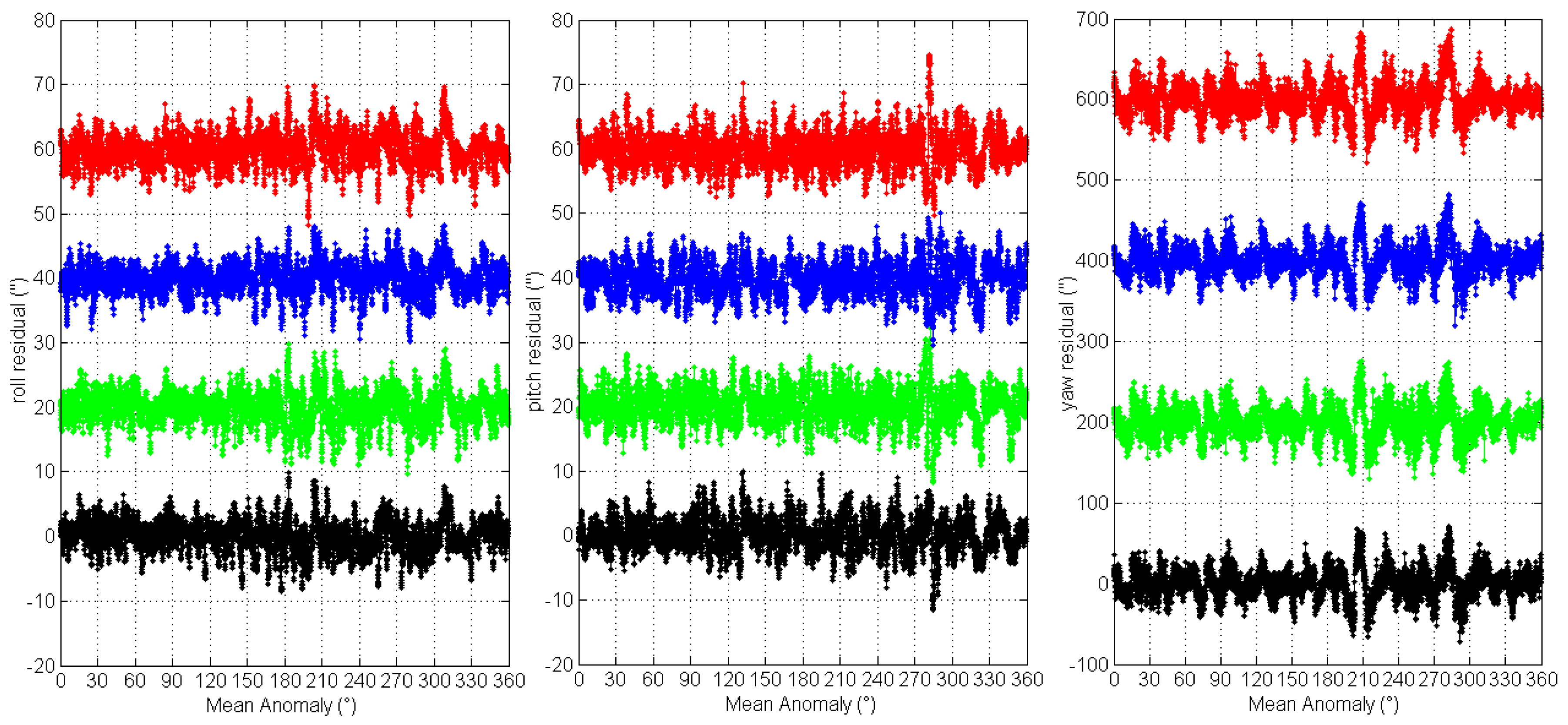
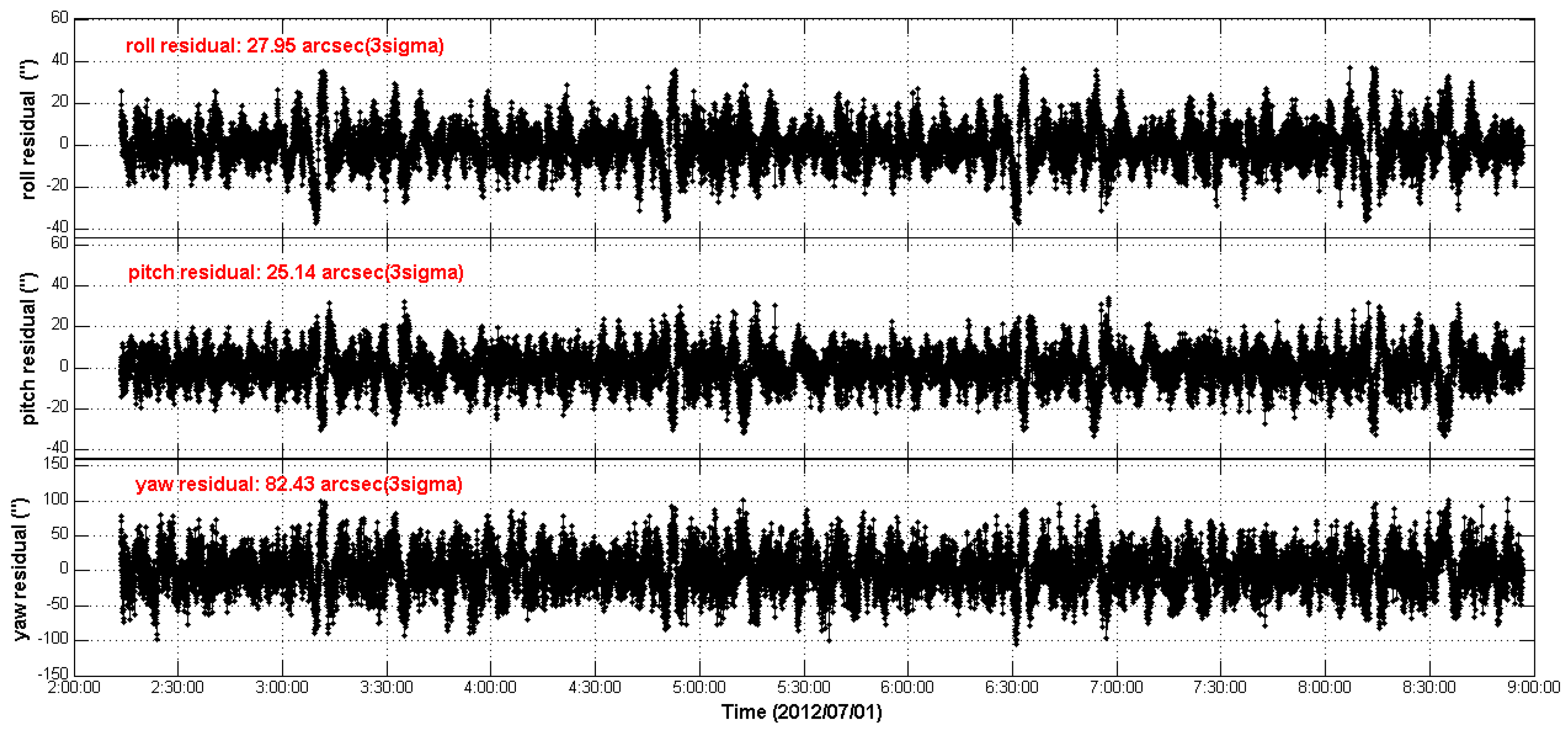
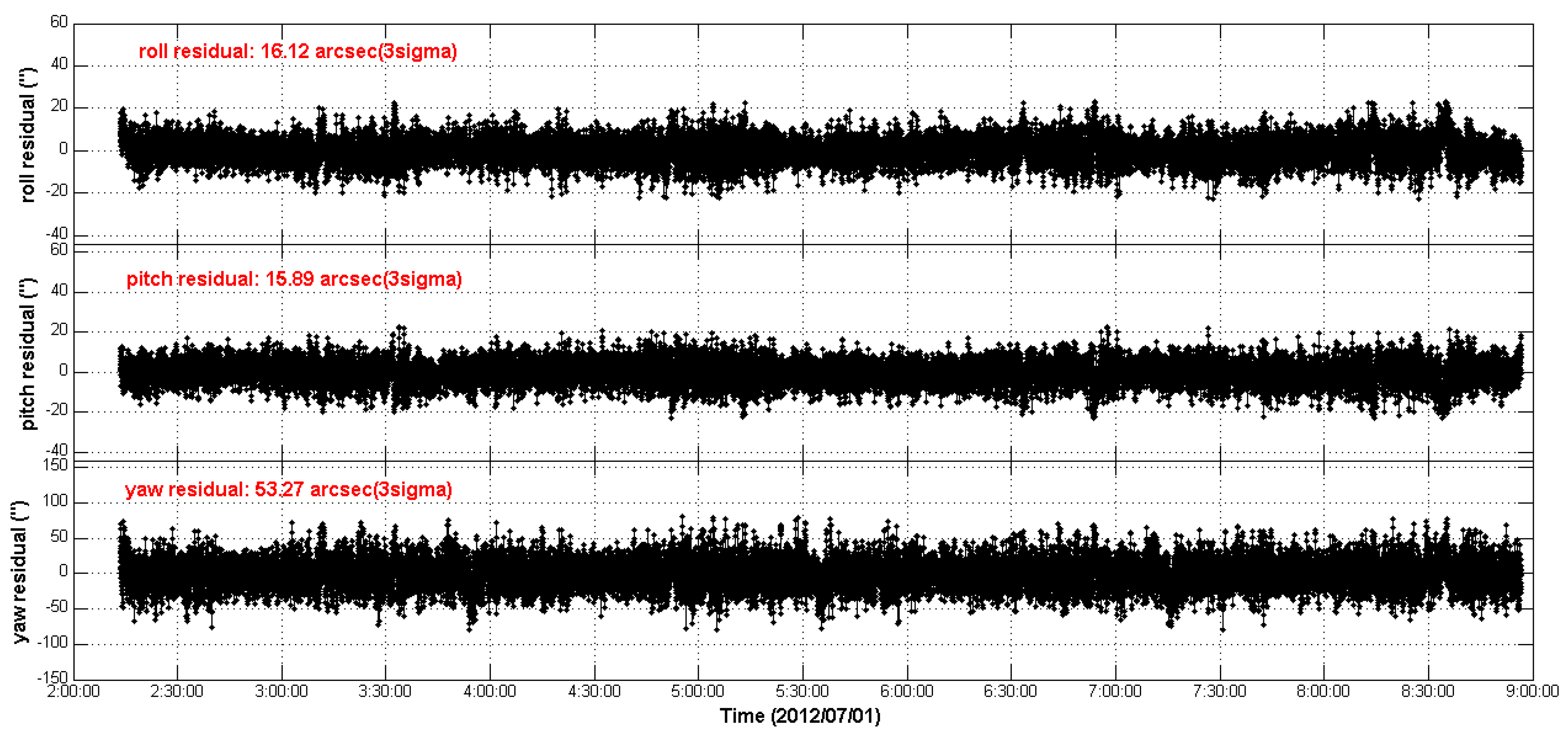
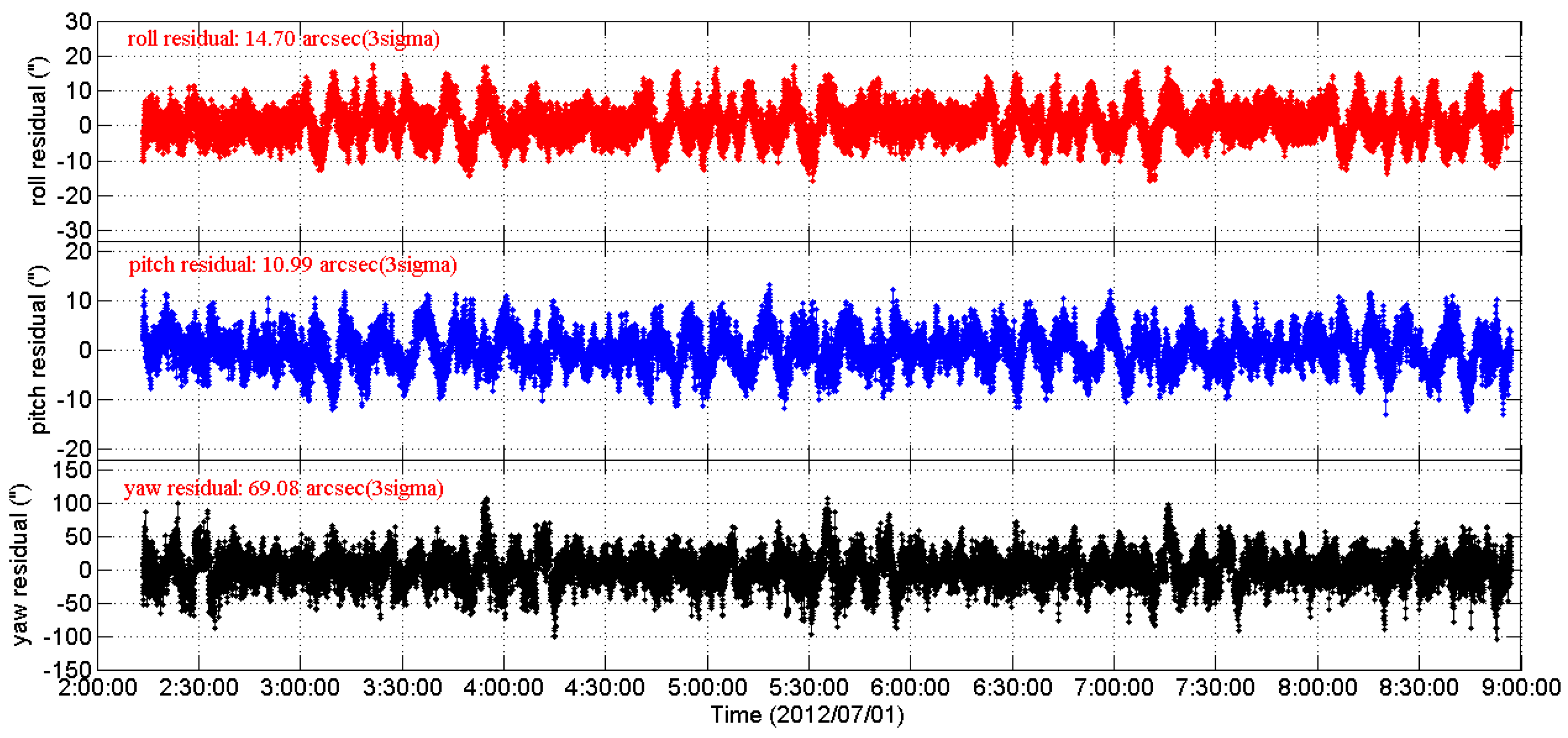
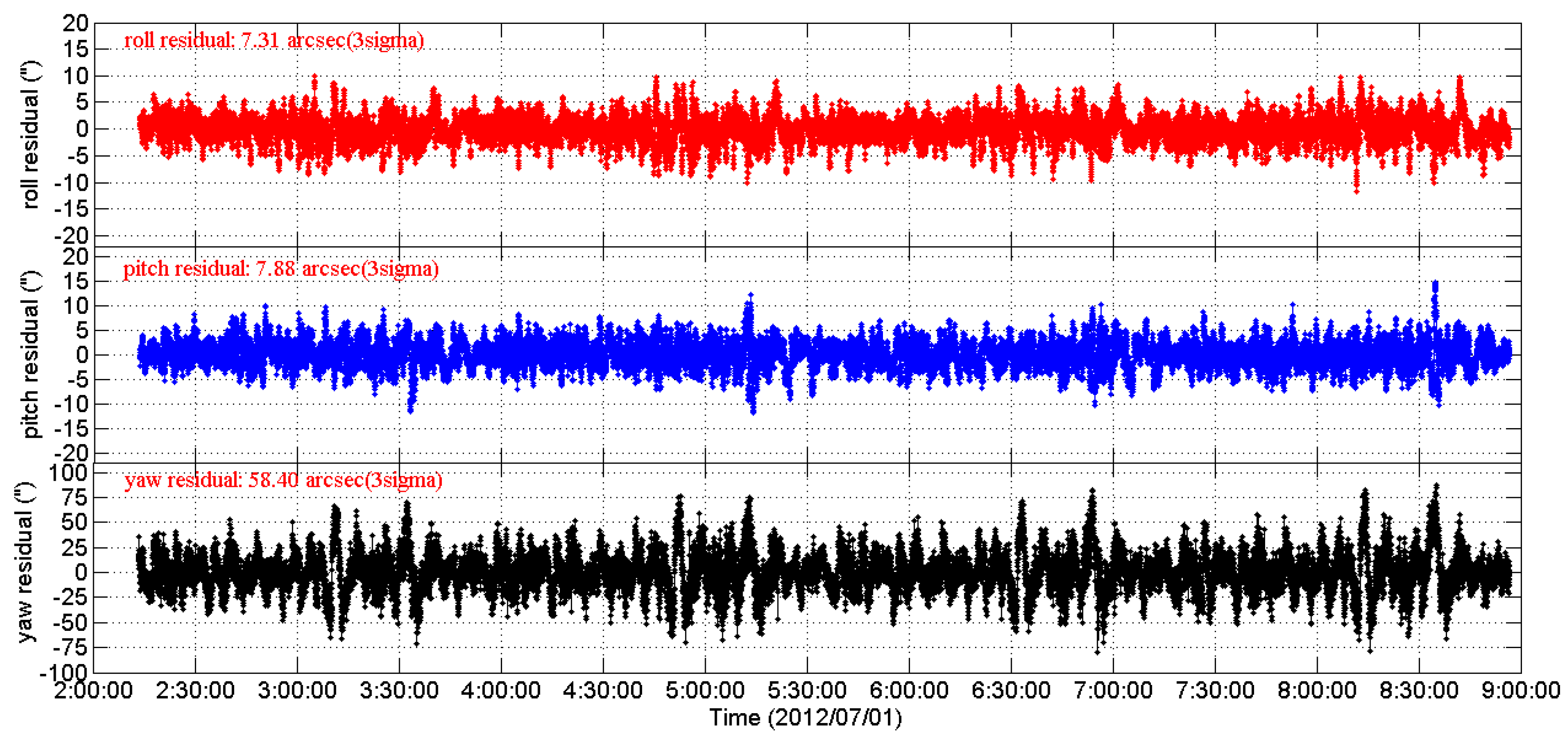
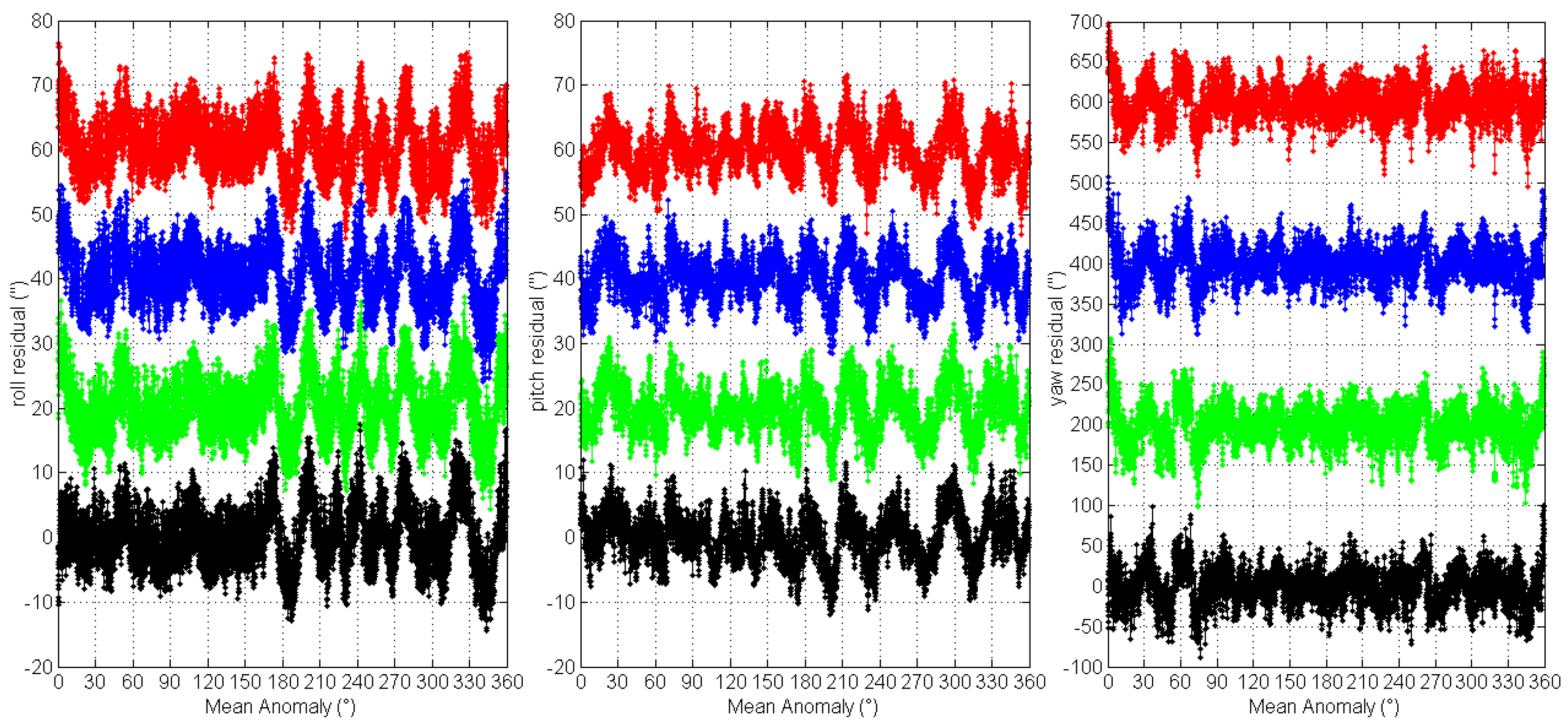
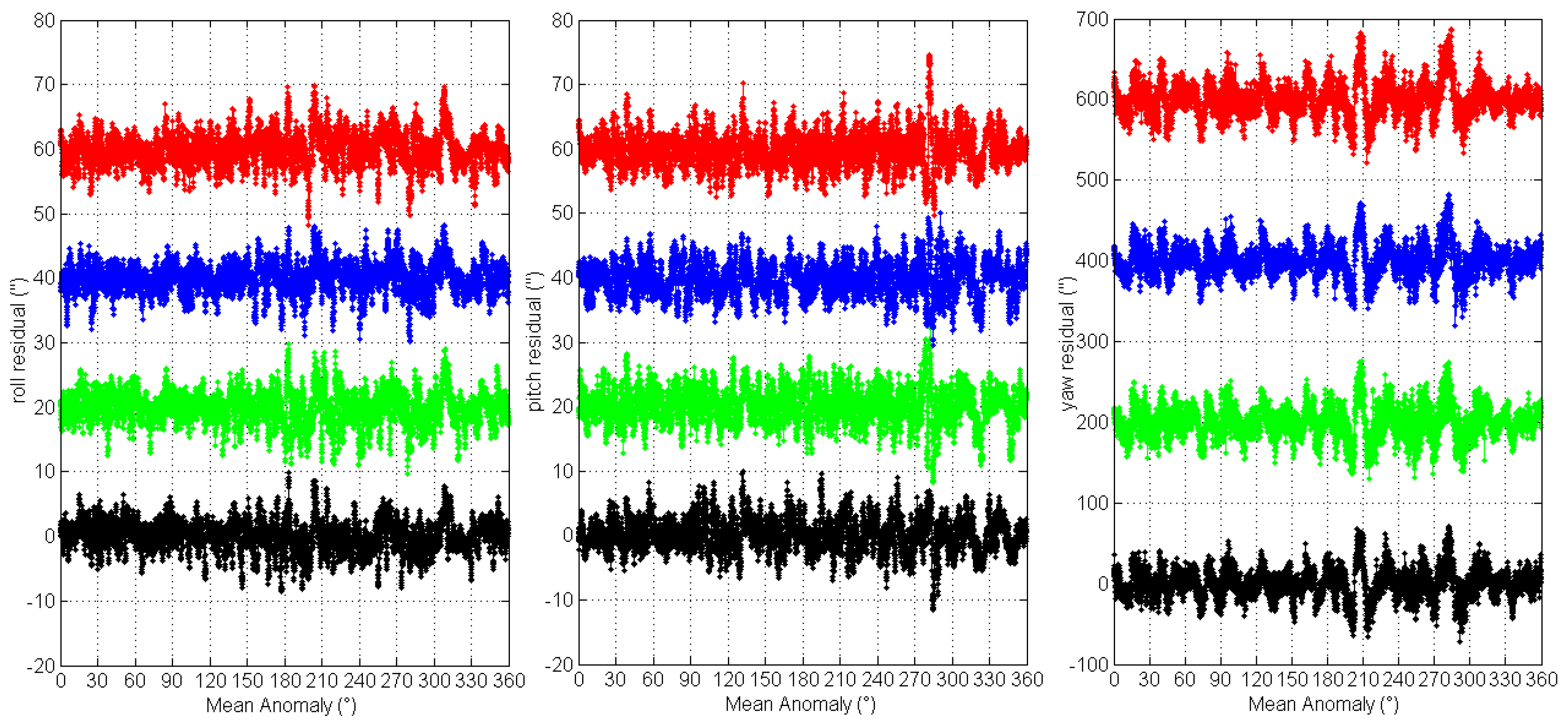
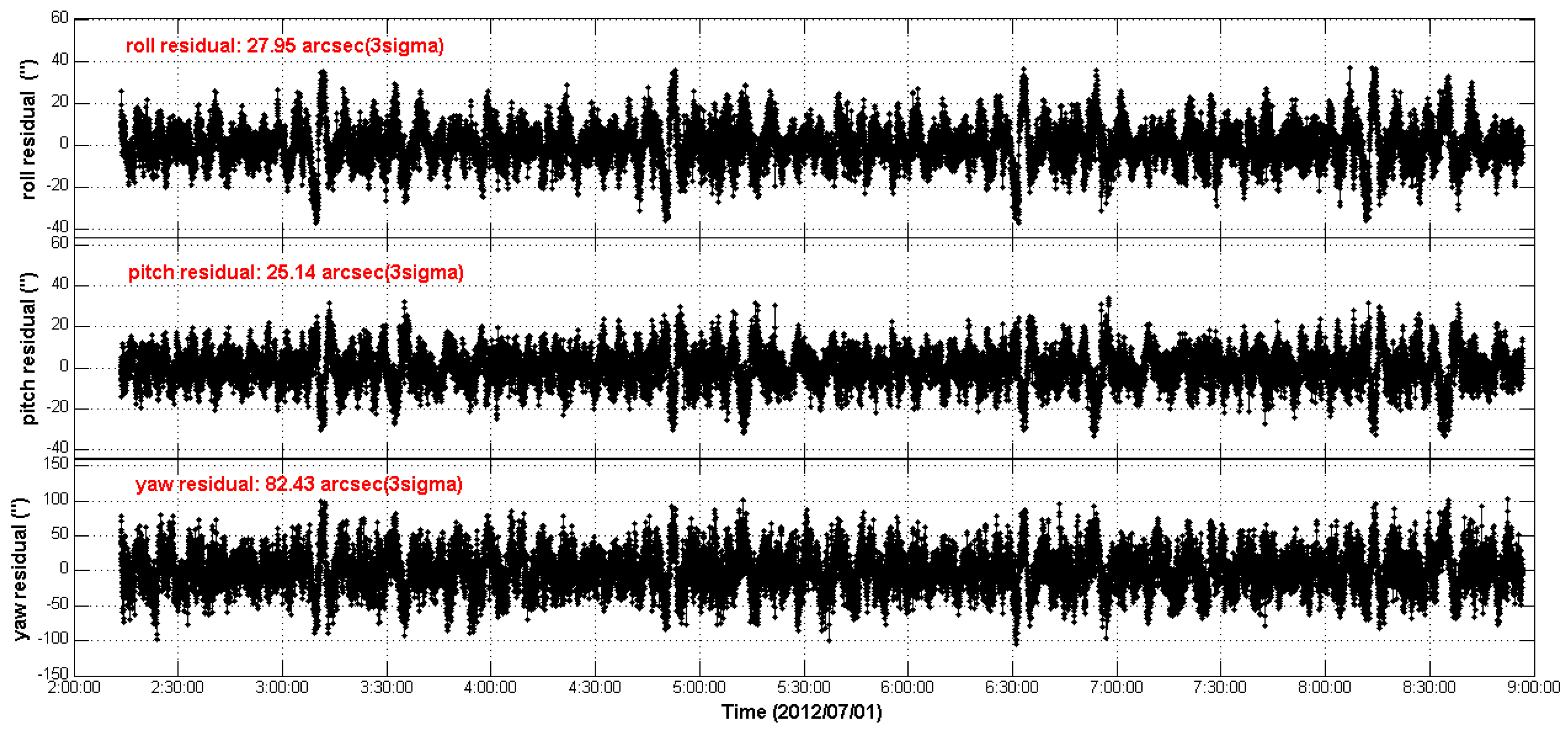
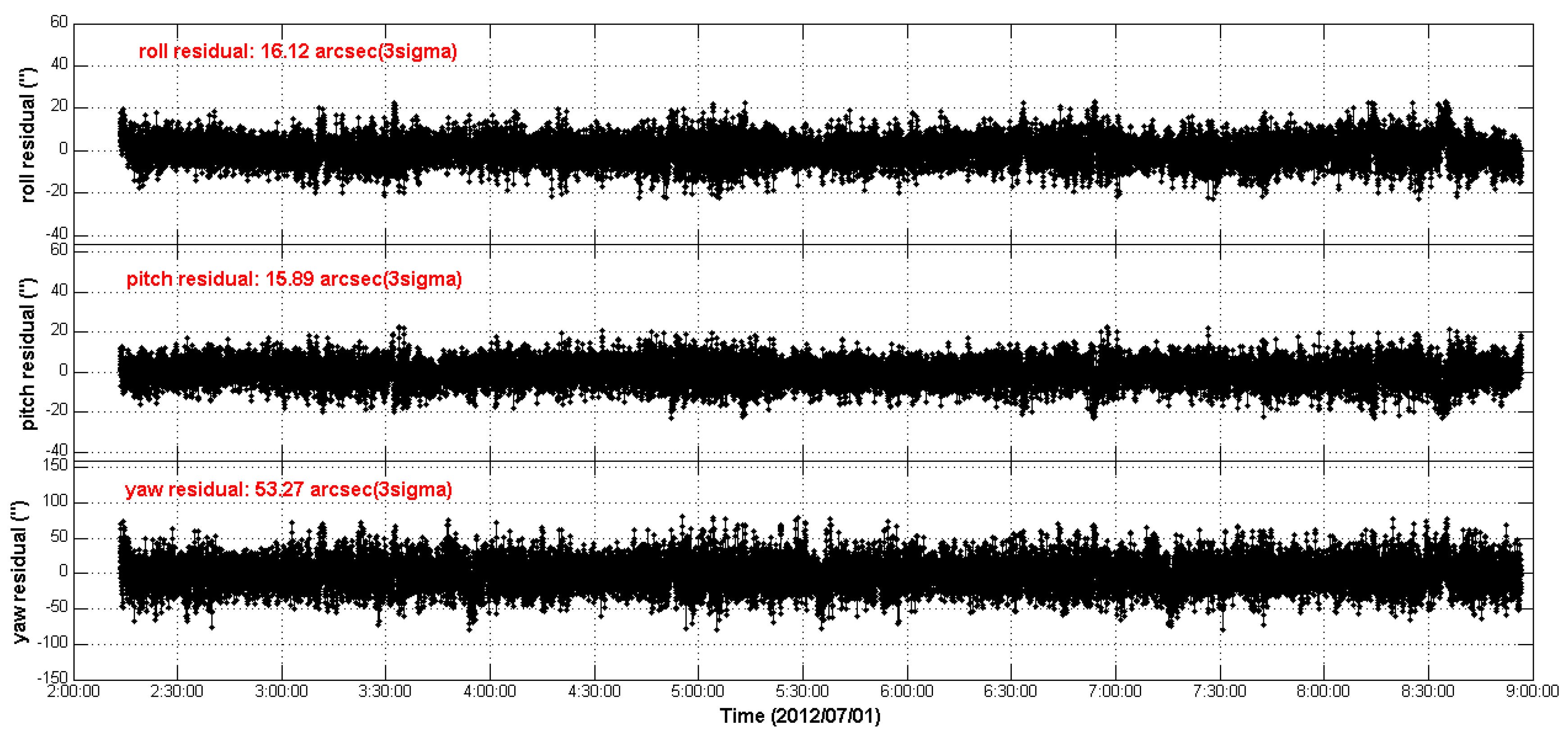
The 3-axes attitude measurement residuals are obtained by converting the residual quaternions to the 3-axes delta Euler angles in “3-1-2” rotation sequence:
where
is the roll angle,
is the pitch angle and
is the yaw angle.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}