
An Accurate Calibration Method Based on Velocity in a Rotational Inertial Navigation System

Abstract
:1. Introduction
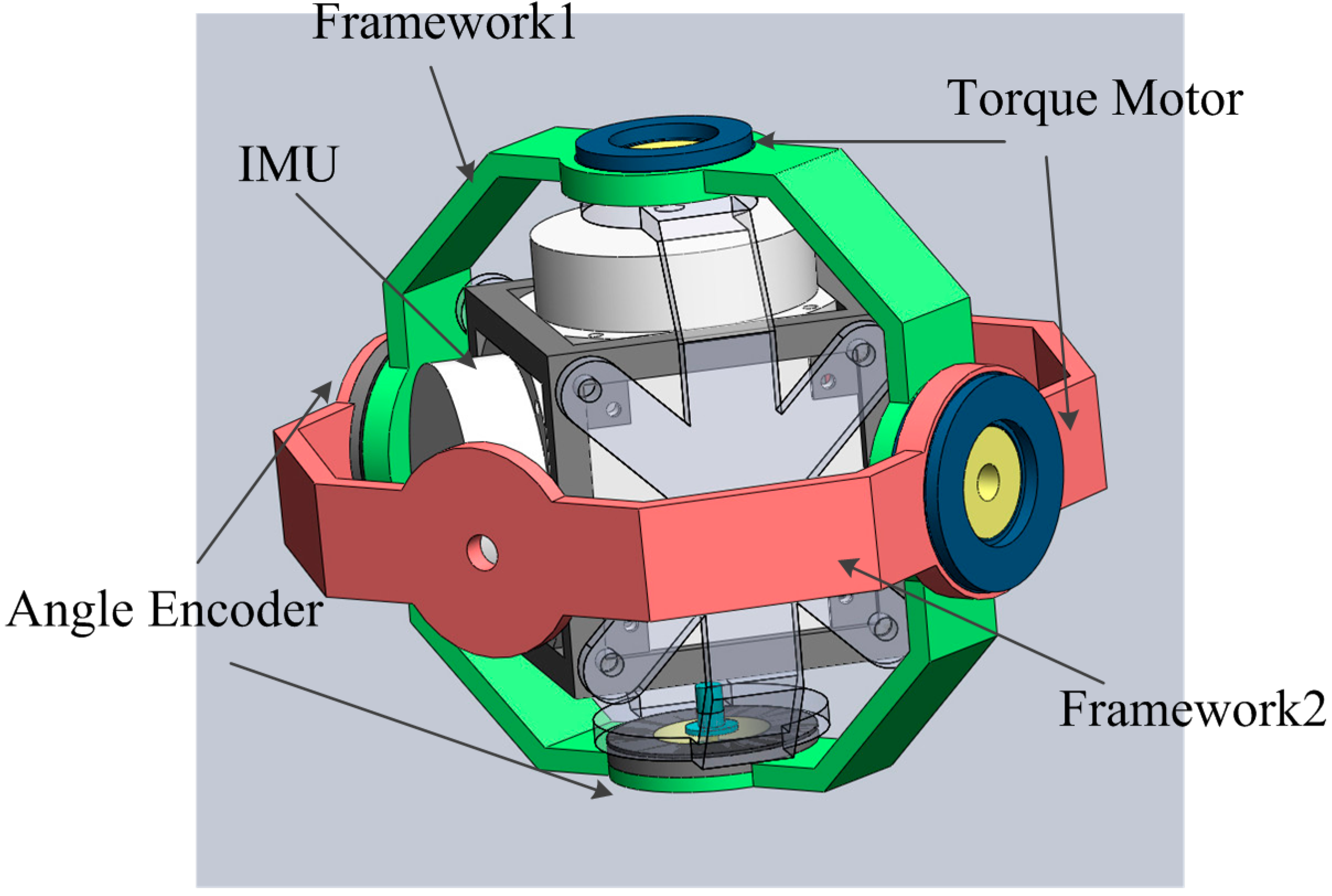
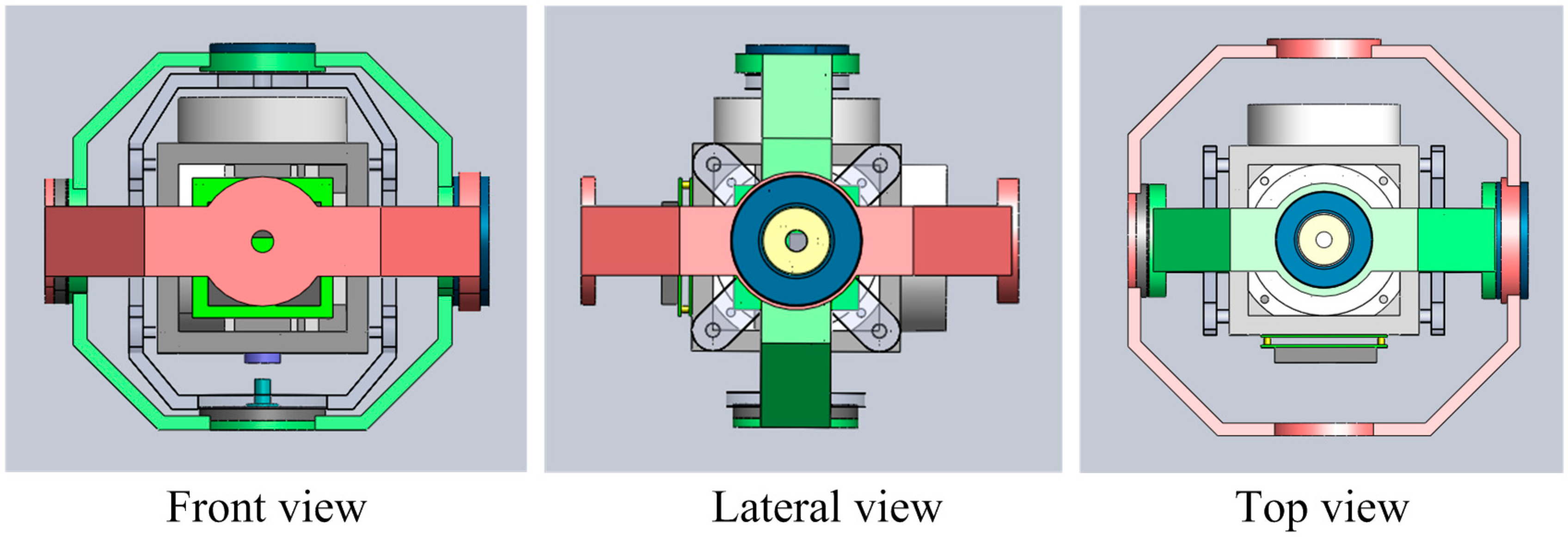
2. Modulation Principle and Experimental Verification
2.1. Modulation Principle in RINS
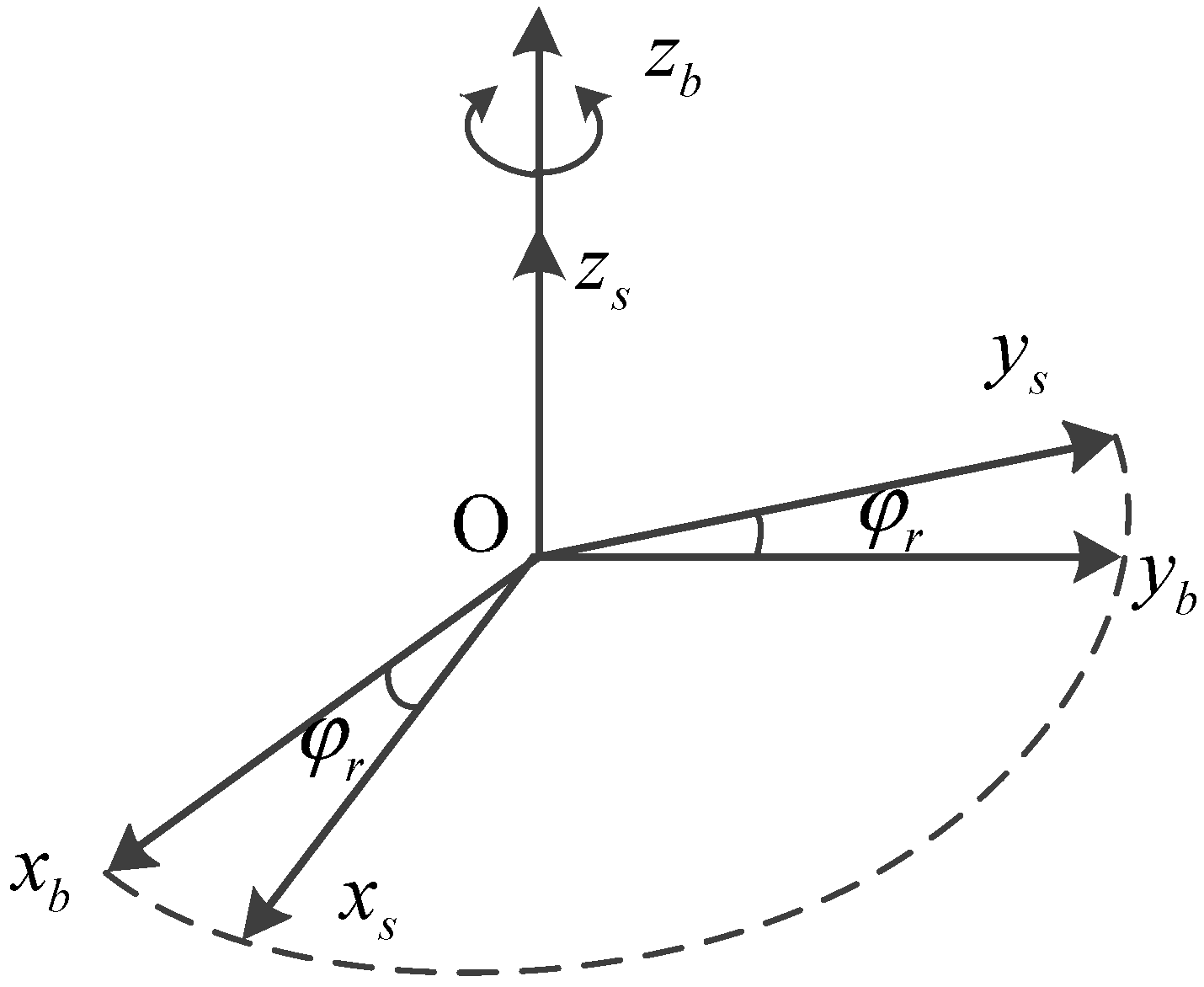
2.1.1. Rotation Along with the Z Axis
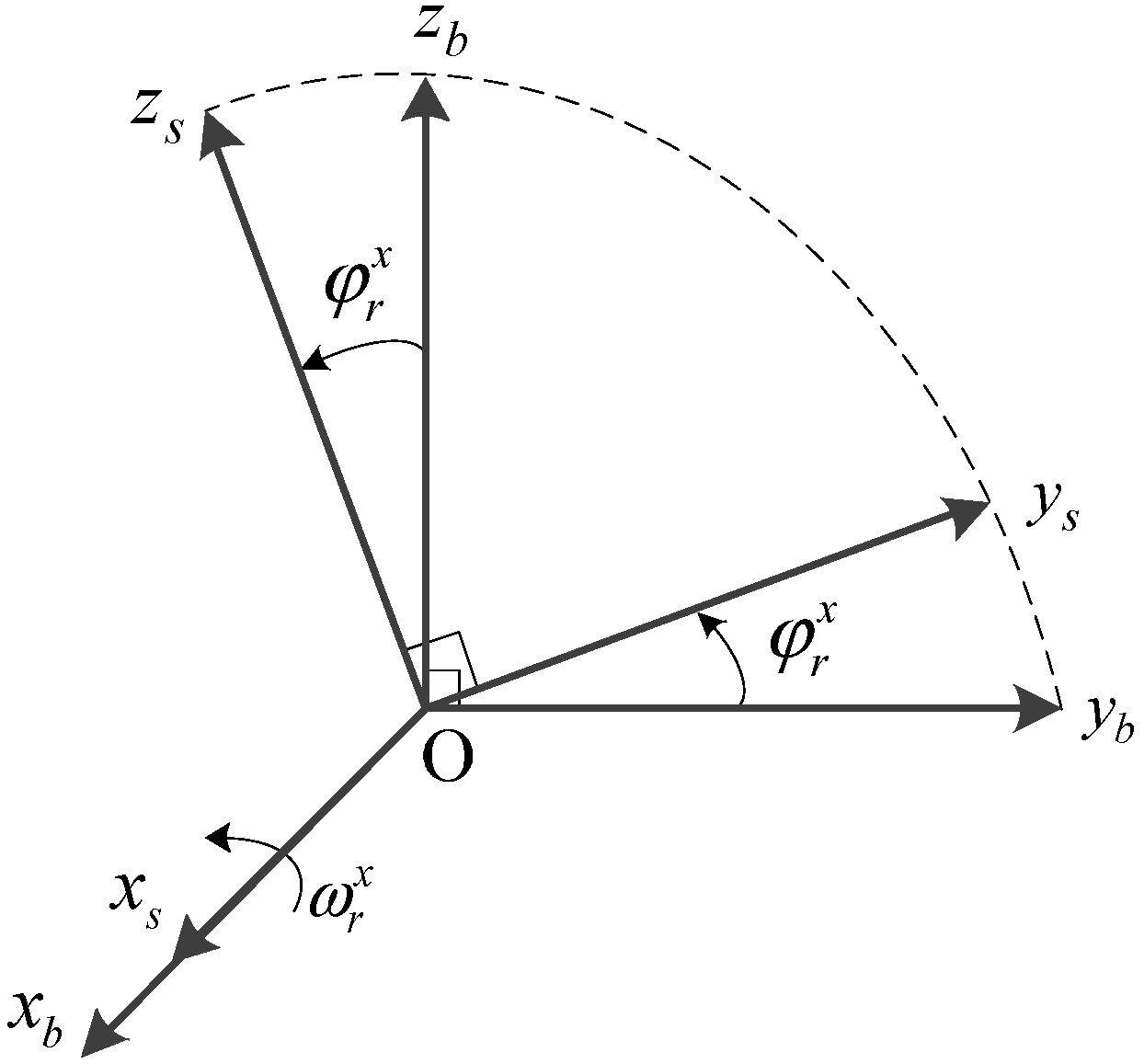
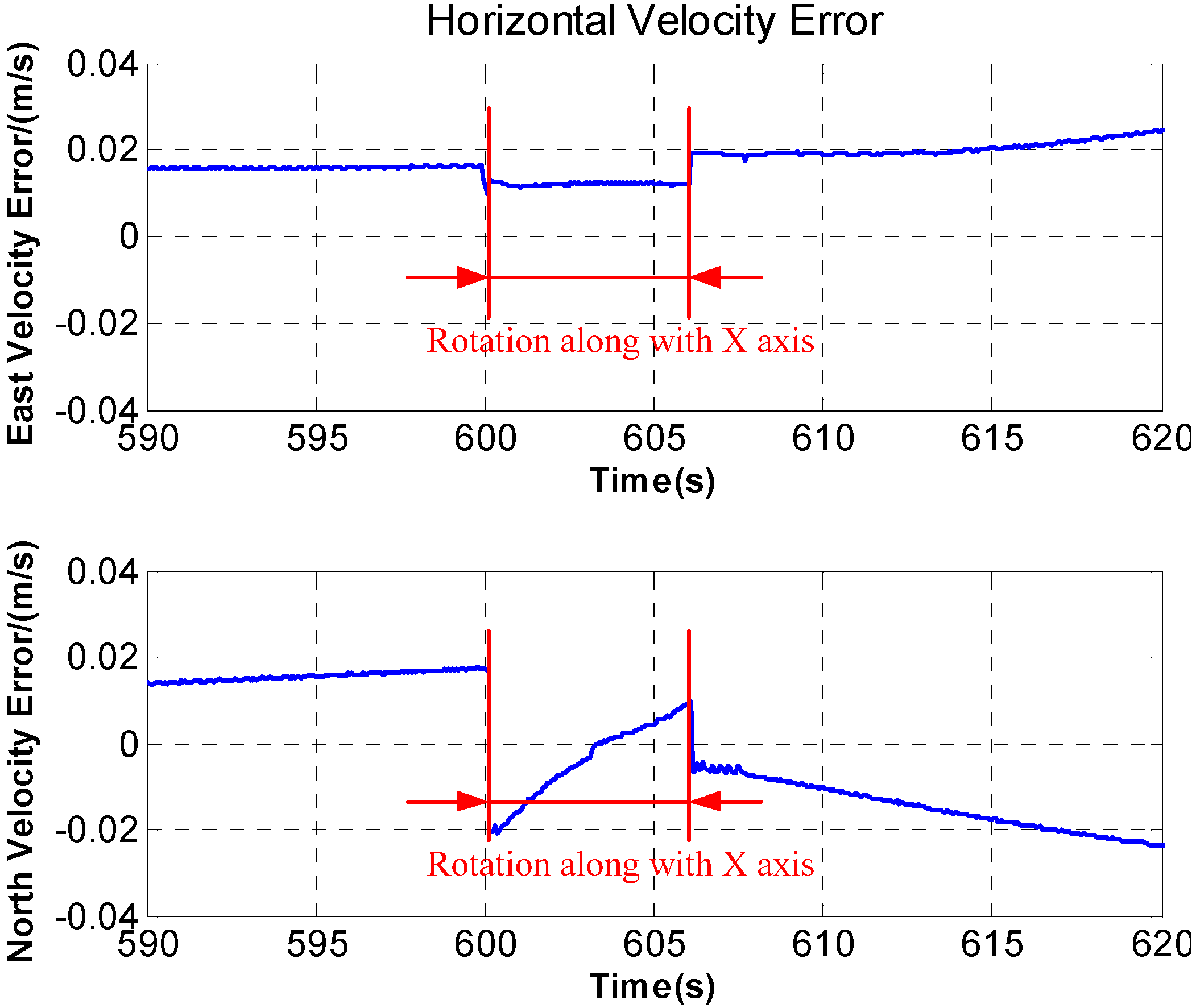
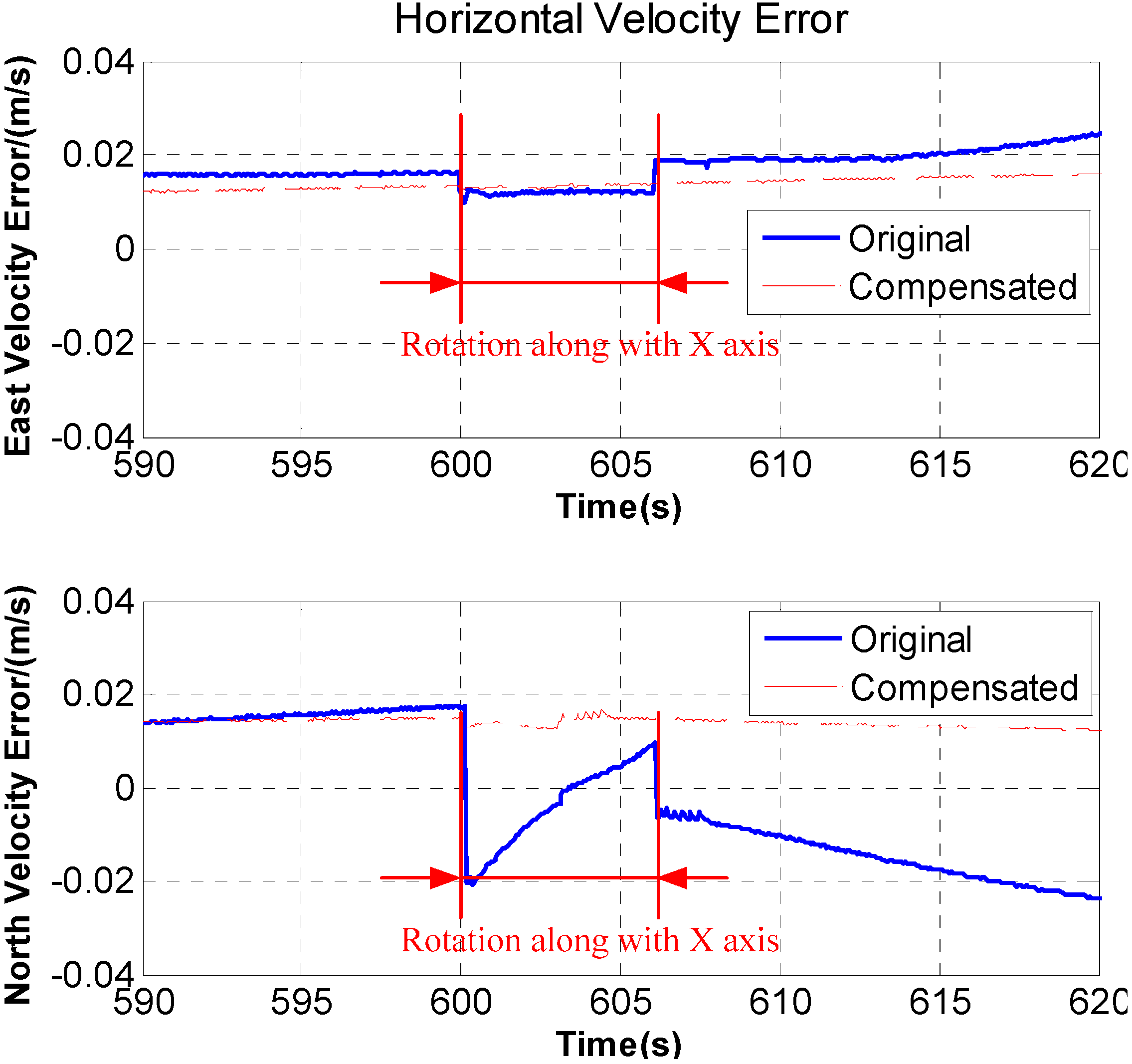
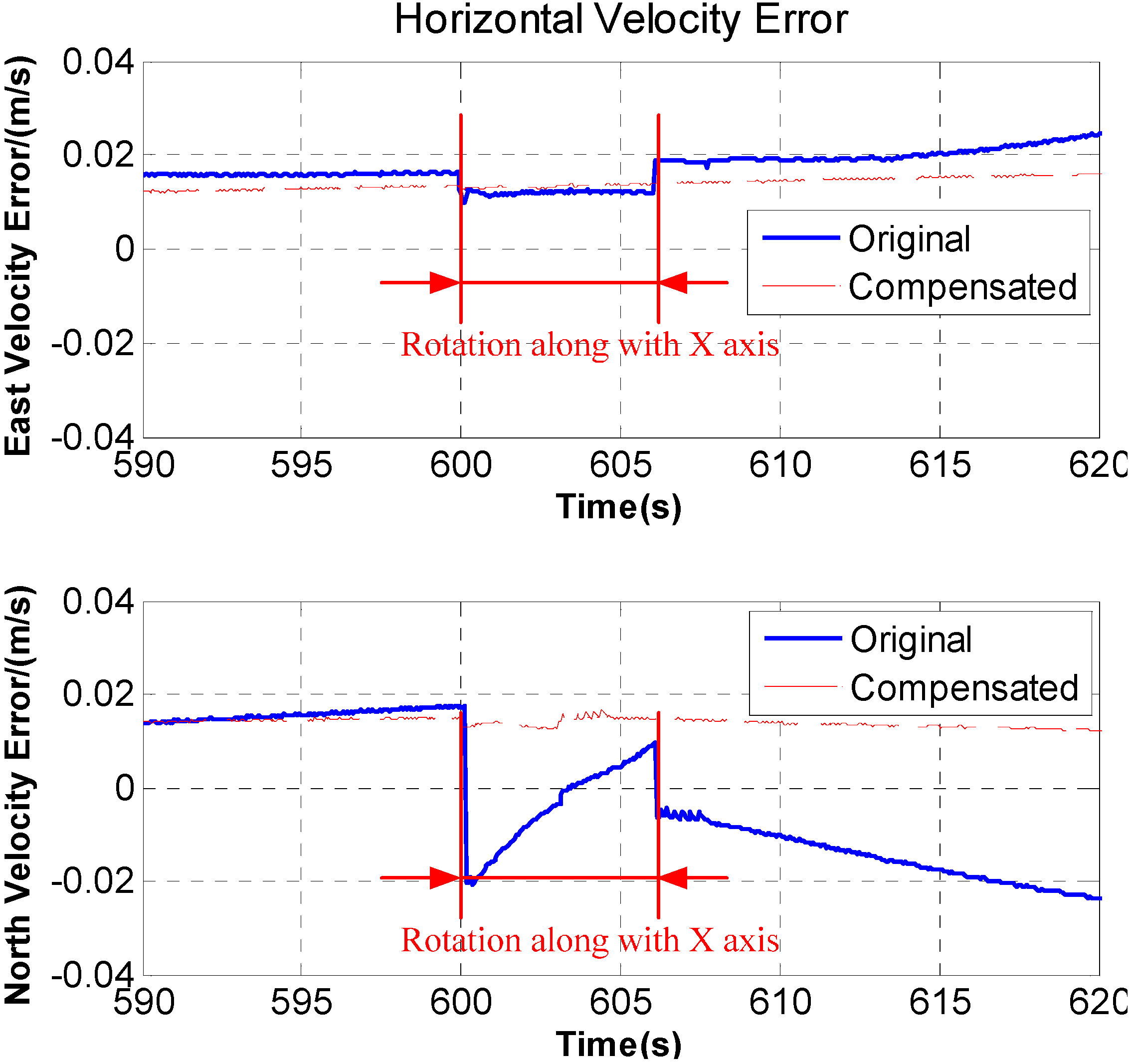
2.1.2. Rotation Along with the X Axis
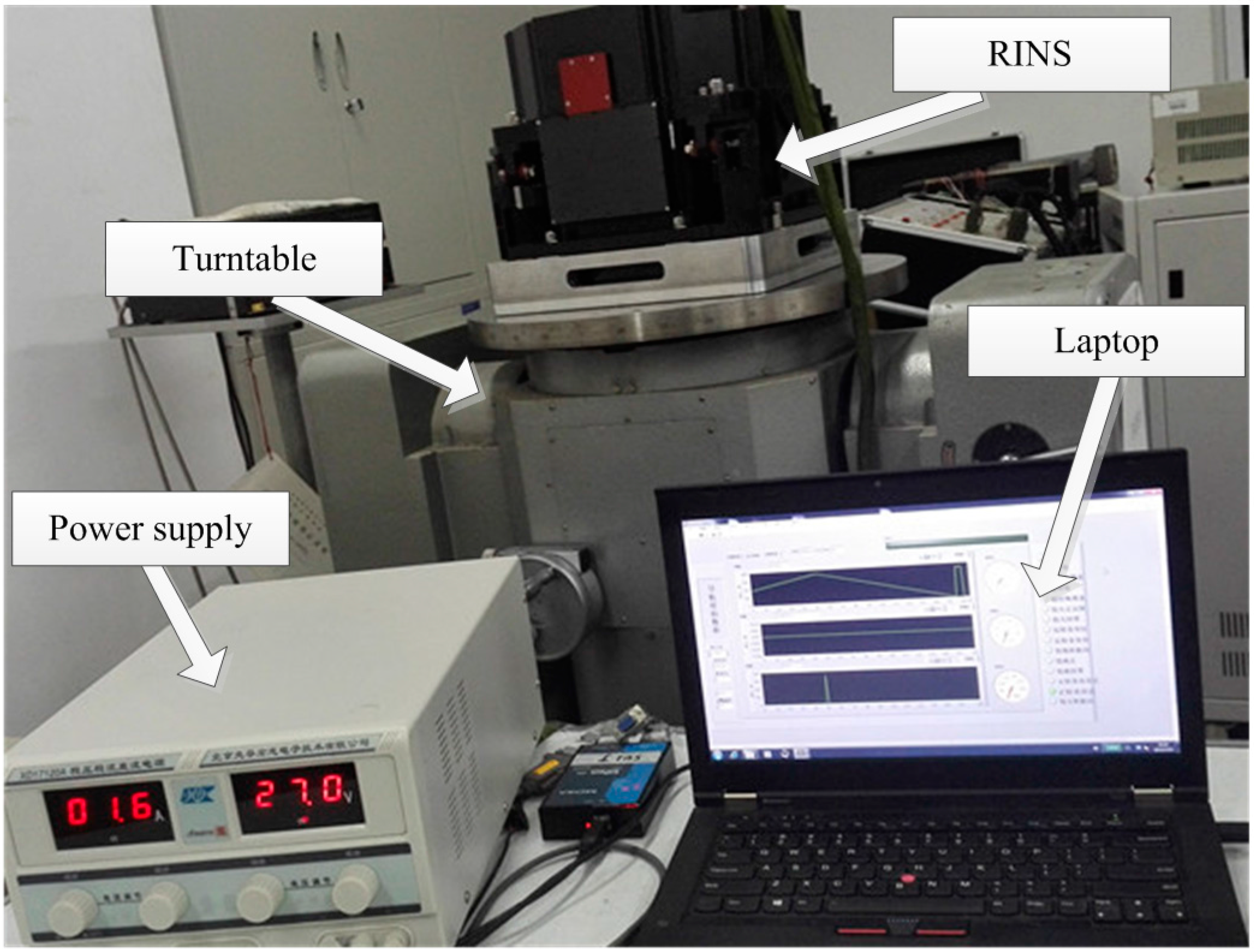
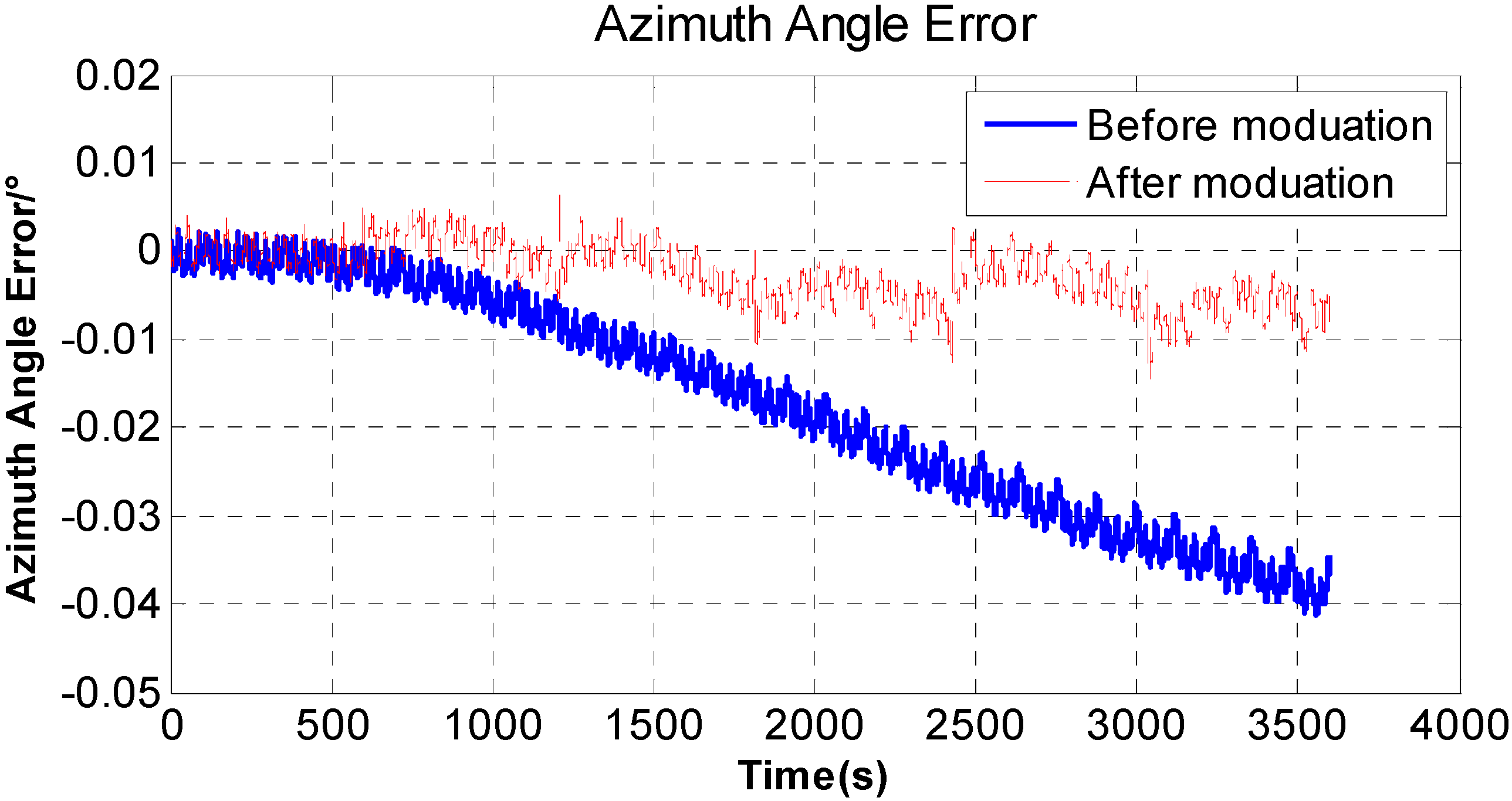
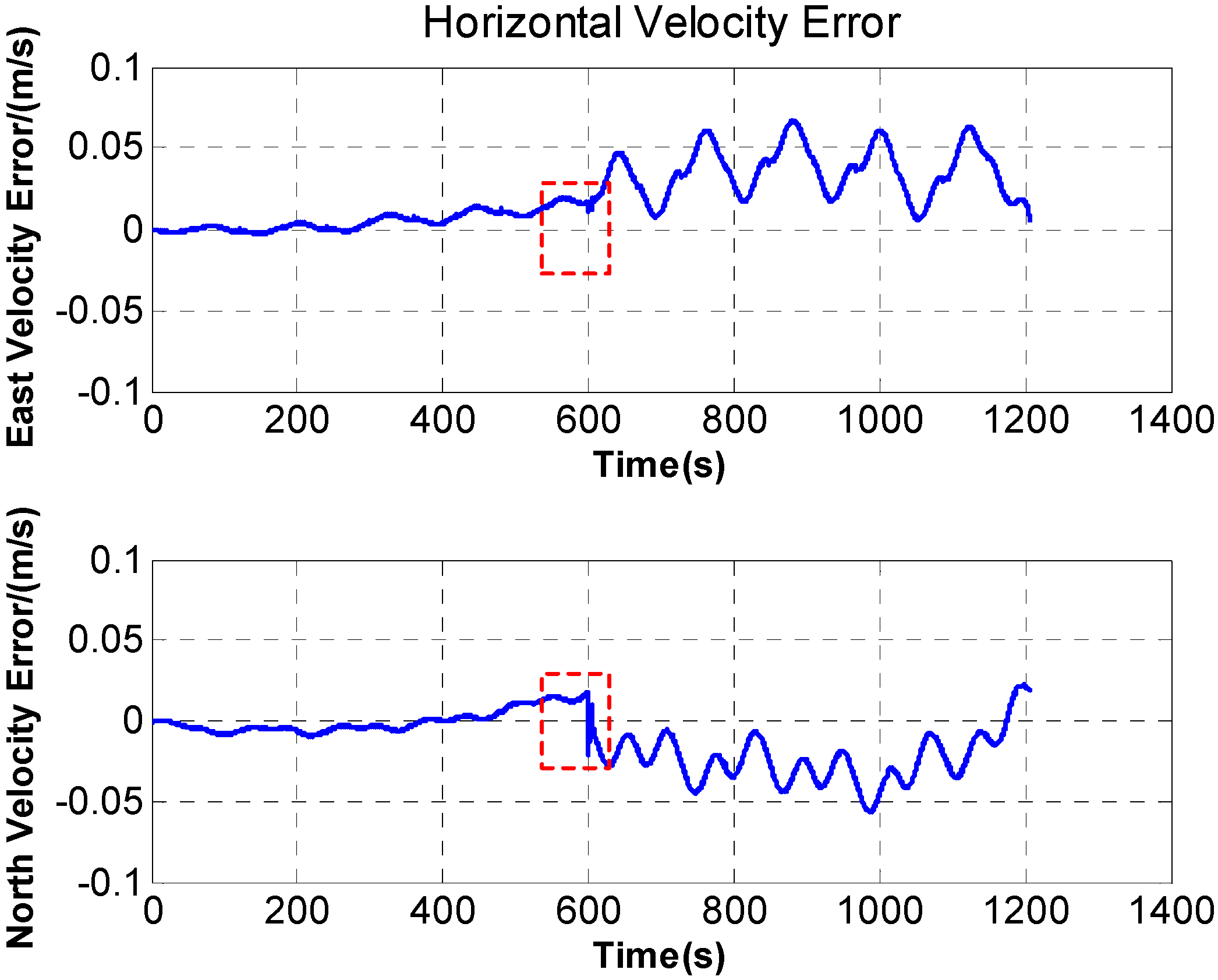
2.2. Experimental Verification
3. Analysis of the Velocity Accuracy
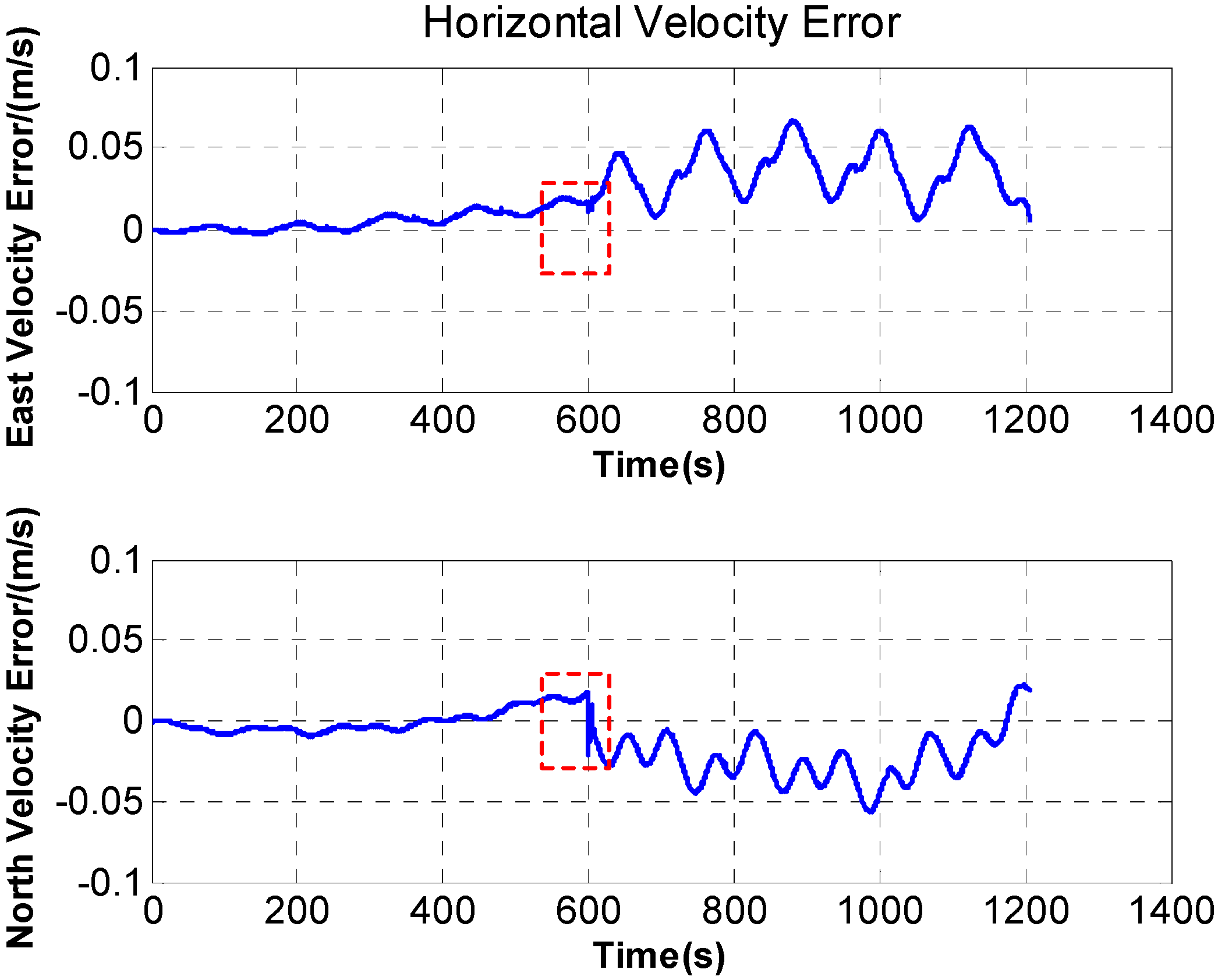
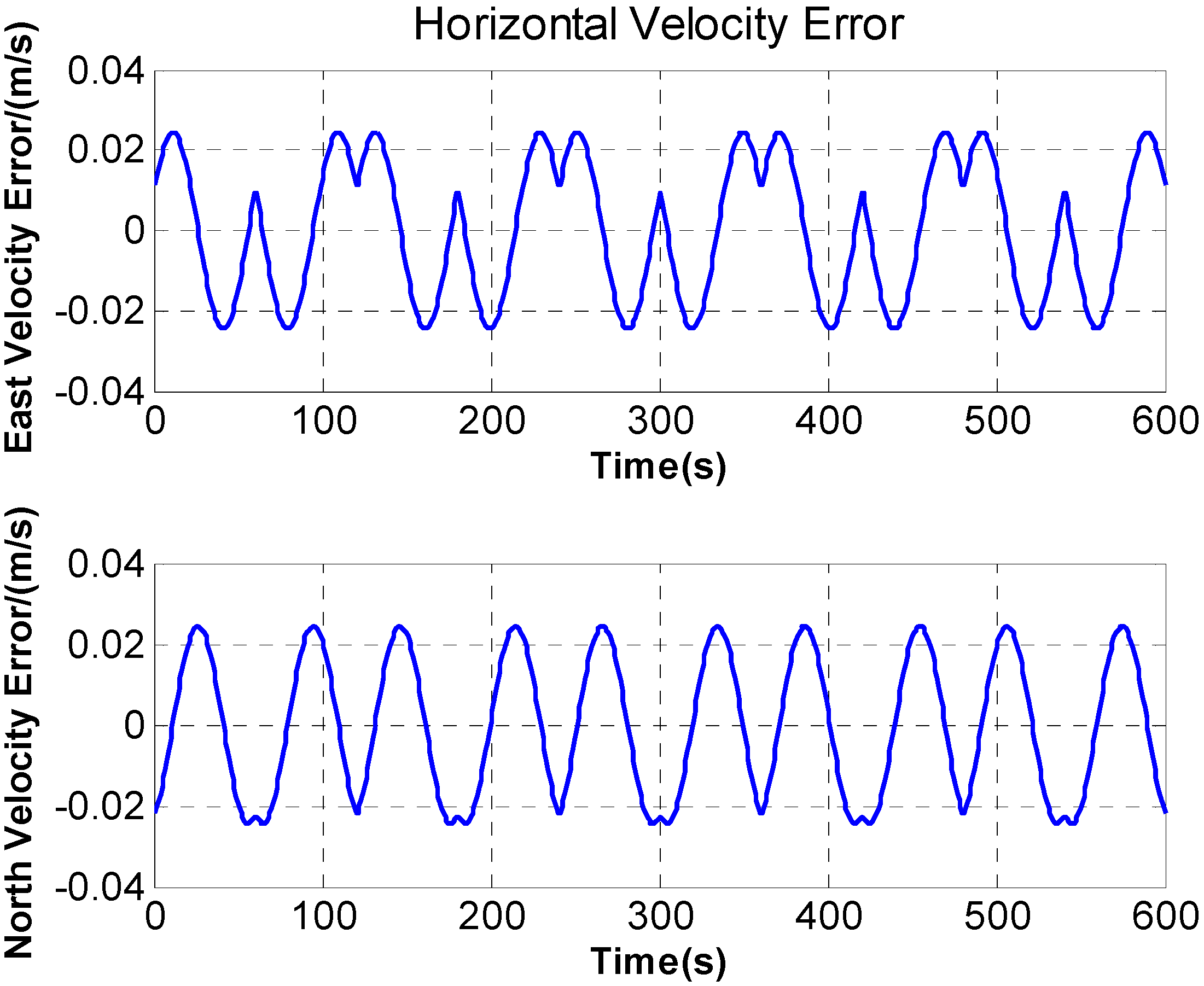
3.1. Analysis of Velocity Fluctuation

3.2. Analysis of Velocity Stage
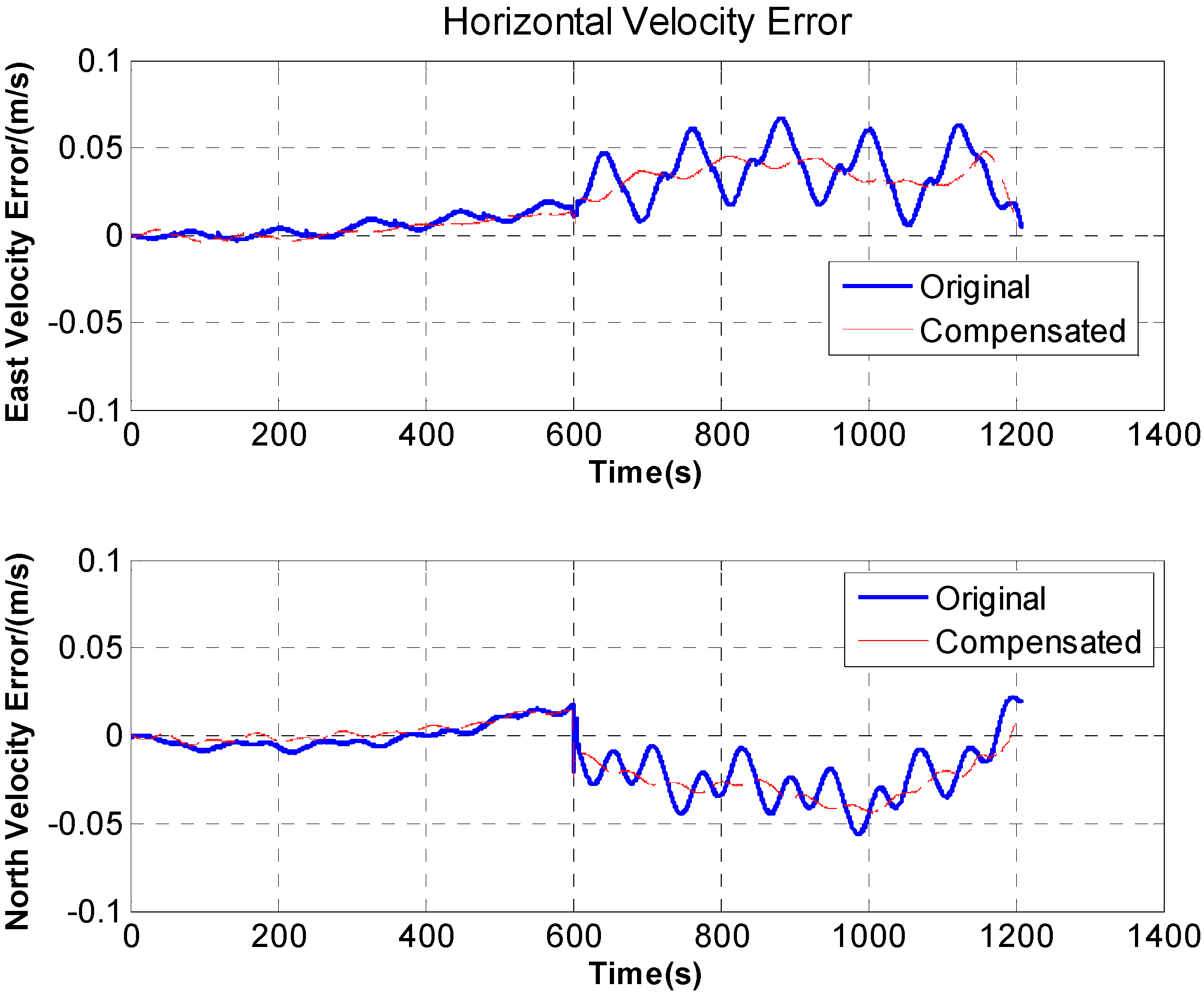
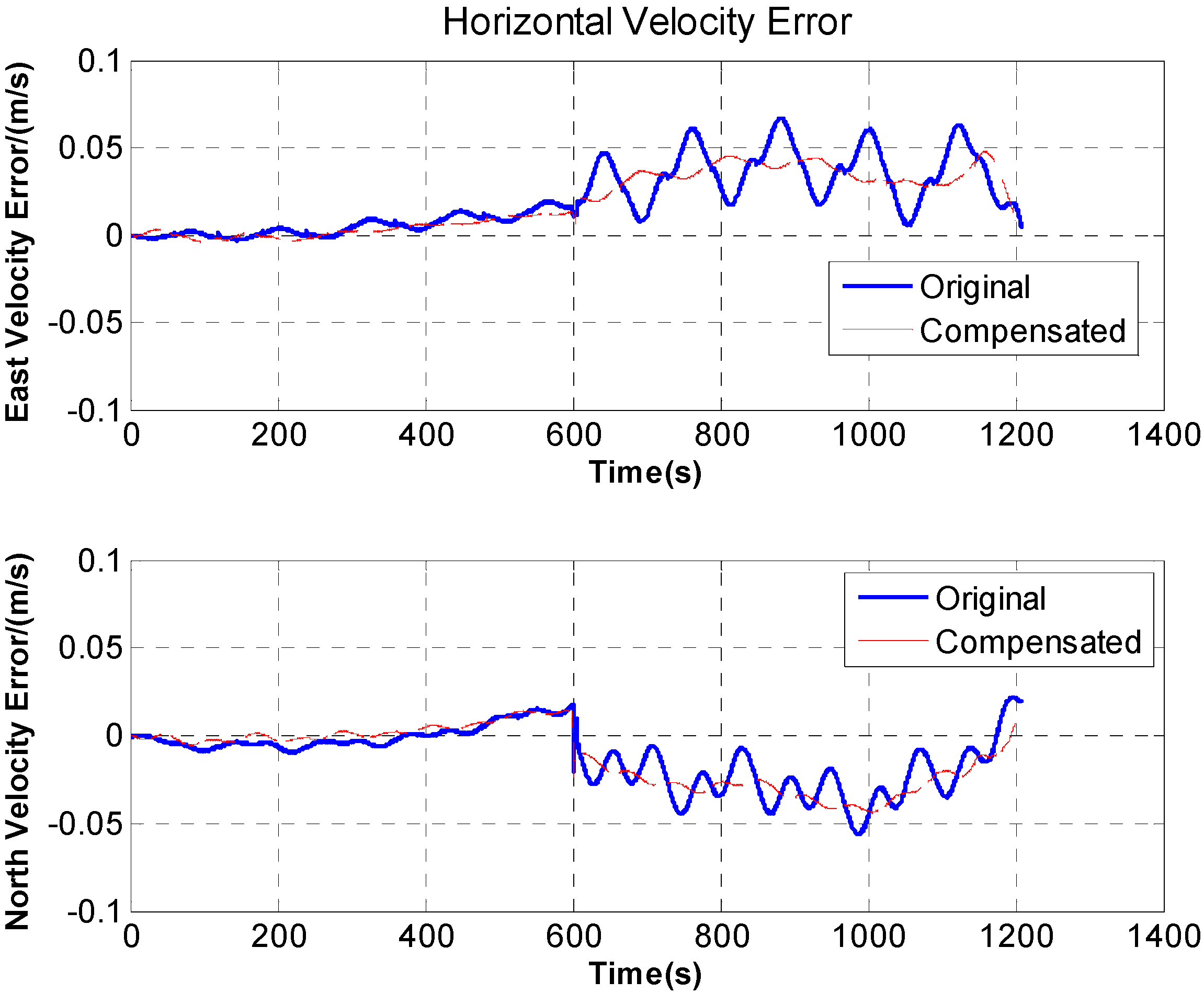
4. Velocity Compensation and Experimental Results
4.1. Improvement in Velocity Fluctuation

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Number | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
| −0.0047 | −0.0049 | −0.0046 | −0.0052 | −0.0045 | |
| −0.0109 | −0.0112 | −0.0114 | −0.0119 | −0.0116 | |
| −0.0112 | −0.0112 | −0.0112 | −0.0114 | −0.0099 | |
| 0.0047 | 0.0052 | 0.0051 | 0.0058 | 0.0052 |
4.2. Improvement in Velocity Stage
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Wang, Q.Y.; Qi, Z.; Sun, F. Six-position calibration for the fiber optic gyro based on a double calculating program. Opt. Eng. 2013, 52, 043603. [Google Scholar] [CrossRef]
- Jwo, D.J.; Shih, J.H.; Hsu, C.S.; Yu, K.L. Development of a strapdown inertial navigation system simulation platform. J. Mar. Sci. Technol. 2014, 22, 381–391. [Google Scholar]
- Lv, P.; Lai, J.Z.; Liu, J.Y.; Nie, M.X. The compensation effects of gyros’ stochastic errors in a rotational inertial navigation system. J. Navig. 2014, 67, 1069–1088. [Google Scholar] [CrossRef]
- Pan, J.Y.; Zhang, C.X.; Niu, Y.X.; Fan, Z. Accurate calibration for drift of fiber optic gyroscope in multi-position north-seeking phase. Opt. Int. J. Light Electron. Opt. 2014, 125, 7244–7246. [Google Scholar] [CrossRef]
- Wang, B.; Ren, Q.; Deng, Z.H.; Fu, M.Y. A self-calibration method for nonorthogonal angles between gimbals of rotational inertial navigation system. IEEE Trans. Ind. Electron. 2015, 62, 2353–2362. [Google Scholar] [CrossRef]
- Gao, W.; Zhang, Y.; Wang, J.G. Research on initial alignment and self-calibration of rotary strapdown inertial navigation systems. Sensors 2015, 15, 3154–3171. [Google Scholar] [CrossRef] [PubMed]
- Kim, M.S.; Yu, S.B.; Lee, W.S. Development of a high-precision calibration method for inertial measurement unit. Int. J. Precis. Eng. Manuf. 2014, 15, 567–575. [Google Scholar] [CrossRef]
- Yuan, B.L.; Liao, D.; Han, S.L. Error compensation of an optical gyro INS by multi-axis rotation. Meas. Sci. Technol. 2012, 23, 025102. [Google Scholar] [CrossRef]
- Sun, W.; Wang, D.X.; Xu, L.W.; Xu, L.L. MEMS-based rotary strapdown inertial navigation system. Measurement 2013, 46, 2585–2596. [Google Scholar] [CrossRef]
- Song, N.F.; Cai, Q.Z.; Yang, G.L.; Yin, H.L. Analysis and calibration of the mounting errors between inertial measurement unit and turntable in dual-axis rotational inertial navigation system. Meas. Sci. Technol. 2013, 24, 115002. [Google Scholar] [CrossRef]
- Nie, Q.; Gao, X.Y.; Liu, Z. Research on accuracy improvement of INS with continuous rotation. In Proceedings of the IEEE International Conference on Information and Automation, Zhuhai, China, 22–24 June 2009; pp. 849–853.
- Sun, W.; Gao, Y. Fiber-based rotary strapdown inertial navigation system. Opt. Eng. 2013, 52, 076106. [Google Scholar] [CrossRef]
- Levinson, E.; Horst, J.; Willcocks, M. The next generation marine inertial navigation is here now. In Proceedings of the IEEE Position Location and Navigation Symposium, Las Vegas, NV, USA, 11–15 April 1994; pp. 121–127.
- Lahham, J.I.; Wigent, D.J.; Coleman, A.L. Tuned support structure for structure-borne noise reduction of inertial navigator with dithered ring laser gyros (RLG). In Proceedings of the IEEE Position Location and Navigation Symposium, San Diego, CA, USA, 13–16 March 2000; pp. 419–428.
- Gao, Y.B.; Guan, L.W.; Wang, T.J.; Kuang, H. Position accuracy analysis for single-axis rotary FSINS. Chin. J. Sci. Instrum. 2014, 35, 794–800. (In Chinese) [Google Scholar]
- Liu, F.; Wang, W.; Wang, L.; Feng, P.D. Error analyses and calibration methods with accelerometers for optical angle encoder in rotational inertial navigation systems. Appl. Opt. 2013, 52, 7724–7731. [Google Scholar] [CrossRef] [PubMed]
- Cheng, J.H.; Li, M.Y.; Chen, D.D.; Chen, L.; Shi, J.Y. Research of strapdown inertial navigation system monitor technique based on dual-axis consequential rotation. In Proceedings of the IEEE International Conference on Information and Automation, Shenzhen, China, 6–8 June 2011; pp. 203–208.
- Nieminen, T.; Kangas, J.; Suuriniemi, S.; Kettunen, L. An enhanced multi-position calibration method for consumer-grade inertial measurement units applied and tested. Meas. Sci. Technol. 2010, 21, 105204. [Google Scholar] [CrossRef]
- Bekkeng, J.K. Calibration of a novel MEMS inertial reference unit. IEEE Trans. Instrum. Meas. 2009, 58, 1967–1974. [Google Scholar] [CrossRef]
- Ren, Q.; Wang, B.; Deng, Z.H.; Fu, M.Y. A multi-position self-calibration method for dual-axis rotational inertial navigation system. Sens. Actuators A Phys. 2014, 219, 24–31. [Google Scholar] [CrossRef]
- Xu, G.P.; Tian, W.F.; Jin, Z.H.; Qian, L. Temperature drift modelling and compensation for a dynamically tuned gyroscope by combining WT and SVM method. Meas. Sci. Technol. 2007, 18, 1425. [Google Scholar] [CrossRef]
- Bin, S.; Kim, H.K.; Digonnet, M.J.F.; Kino, G.S. Reduced thermal sensitivity of a fiber-optic gyroscope using an air-core photonic-bandgap fiber. J. Lightwave Technol. 2007, 25, 861–865. [Google Scholar]
- Zhang, D.W.; Zhao, Y.X.; Shu, X.W.; Liu, C.; Fu, W.L.; Zhou, W.Q. Magnetic drift in single depolarizer interferometric fiber-optic gyroscopes induced by orthogonal magnetic field. Opt. Eng. 2013, 52, 054403. [Google Scholar] [CrossRef]
- Zhang, Z.M.; Hu, W.B.; Liu, F.; Gan, W.B.; Yang, Y. Vibration Error Research of Fiber Optic Gyroscope in Engineering Surveying. Indones. J. Electr. Eng. 2013, 11, 1949–1955. [Google Scholar]
- Ben, Y.Y.; Li, Q.; Zhang, Y.; Huo, L. Time-varying gyrocompass alignment for fiber-optic-gyro inertial navigation system with large misalignment angle. Opt. Eng. 2013, 53, 095103. [Google Scholar] [CrossRef]
- Plessis, F.D.; Swanepoel, F.; Nel, A. An alternative methodology for fiber optic gyroscope calibration. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Chicago, II, USA, 10–13 August 2009; pp. 1–24.
- Ma, Y.H.; Fang, J.C.; Li, J.L. Accurate estimation of lever arm in SINS/GPS integration by smoothing methods. Measurement 2014, 48, 119–127. [Google Scholar] [CrossRef]
- Gao, Q.W.; Zhao, G.R.; Wang, X.B. Transfer alignment error compensator design for flexure and lever-arm effect. In Proceedings of the IEEE International Conference on Industrial Electronics and Application, Xi’an, China, 25–27 May 2009; pp. 1810–1813.
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Q.; Wang, L.; Liu, Z.; Feng, P. An Accurate Calibration Method Based on Velocity in a Rotational Inertial Navigation System. Sensors 2015, 15, 18443-18458. https://doi.org/10.3390/s150818443
Zhang Q, Wang L, Liu Z, Feng P. An Accurate Calibration Method Based on Velocity in a Rotational Inertial Navigation System. Sensors. 2015; 15(8):18443-18458. https://doi.org/10.3390/s150818443
Chicago/Turabian StyleZhang, Qian, Lei Wang, Zengjun Liu, and Peide Feng. 2015. "An Accurate Calibration Method Based on Velocity in a Rotational Inertial Navigation System" Sensors 15, no. 8: 18443-18458. https://doi.org/10.3390/s150818443