
An Autonomous Satellite Time Synchronization System Using Remotely Disciplined VC-OCXOs

Abstract
:1. Introduction
2. System Design



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System | Clock | Clock Error Extraction Method | Syntonization | Autonomous |
|---|---|---|---|---|
| GPS Block IIR crosslink | Atomic clock & VCXO | Asynchronous two-way ranging | Yes | Yes |
| RESSOX | VC-OCXO | Using GPS signals and the follow-up processes on the ground station | Yes | No |
| NAMURU V3.2 | VC-TCXO | Disciplining to GPS time | Yes | Yes |
| GRACE | OCXO | Synchronous dual one-way ranging | No | No |
| Proposed system | VC-OCXO | STDD & FDD dual one-way ranging | Yes | Yes |
2.1. Clock Model
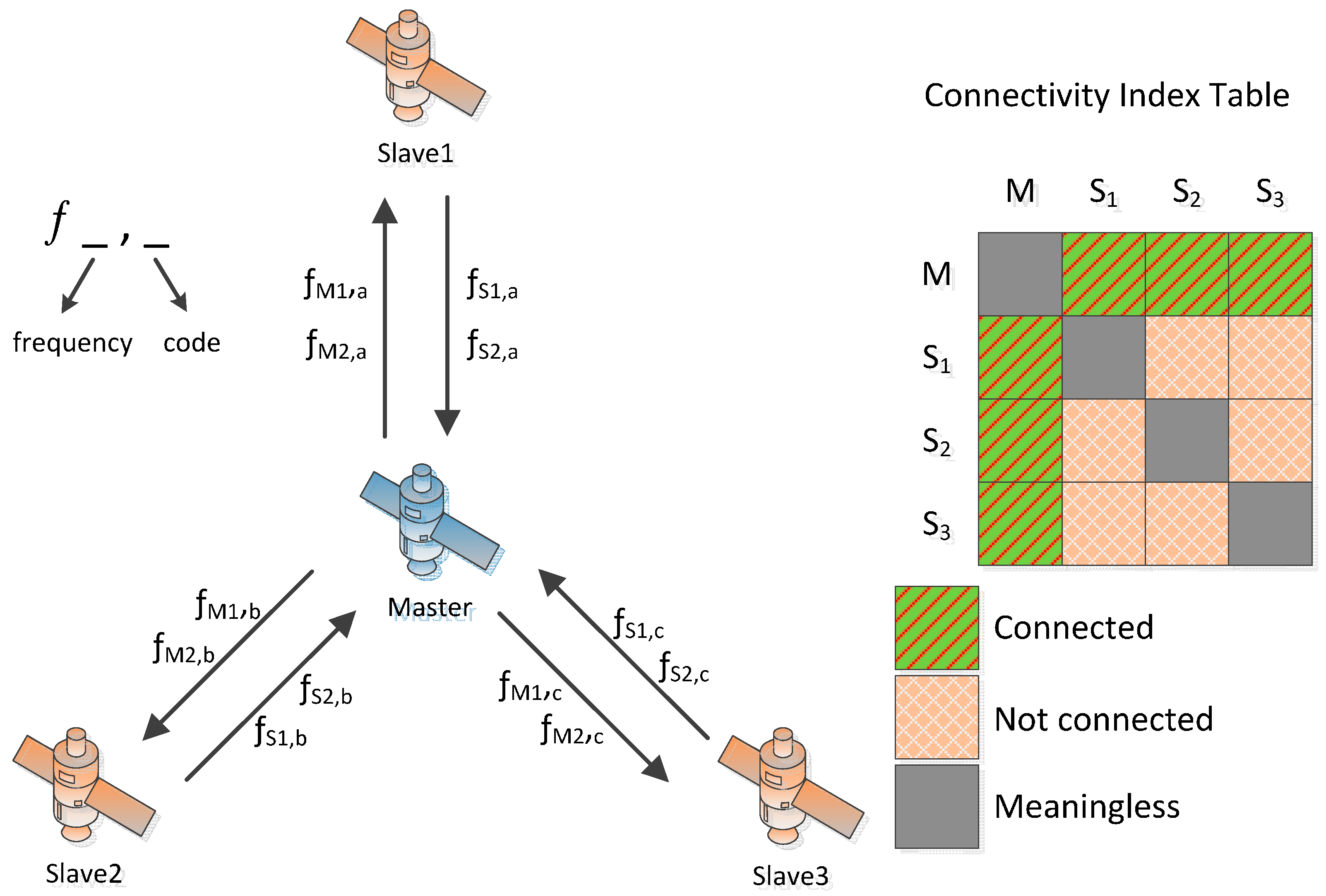
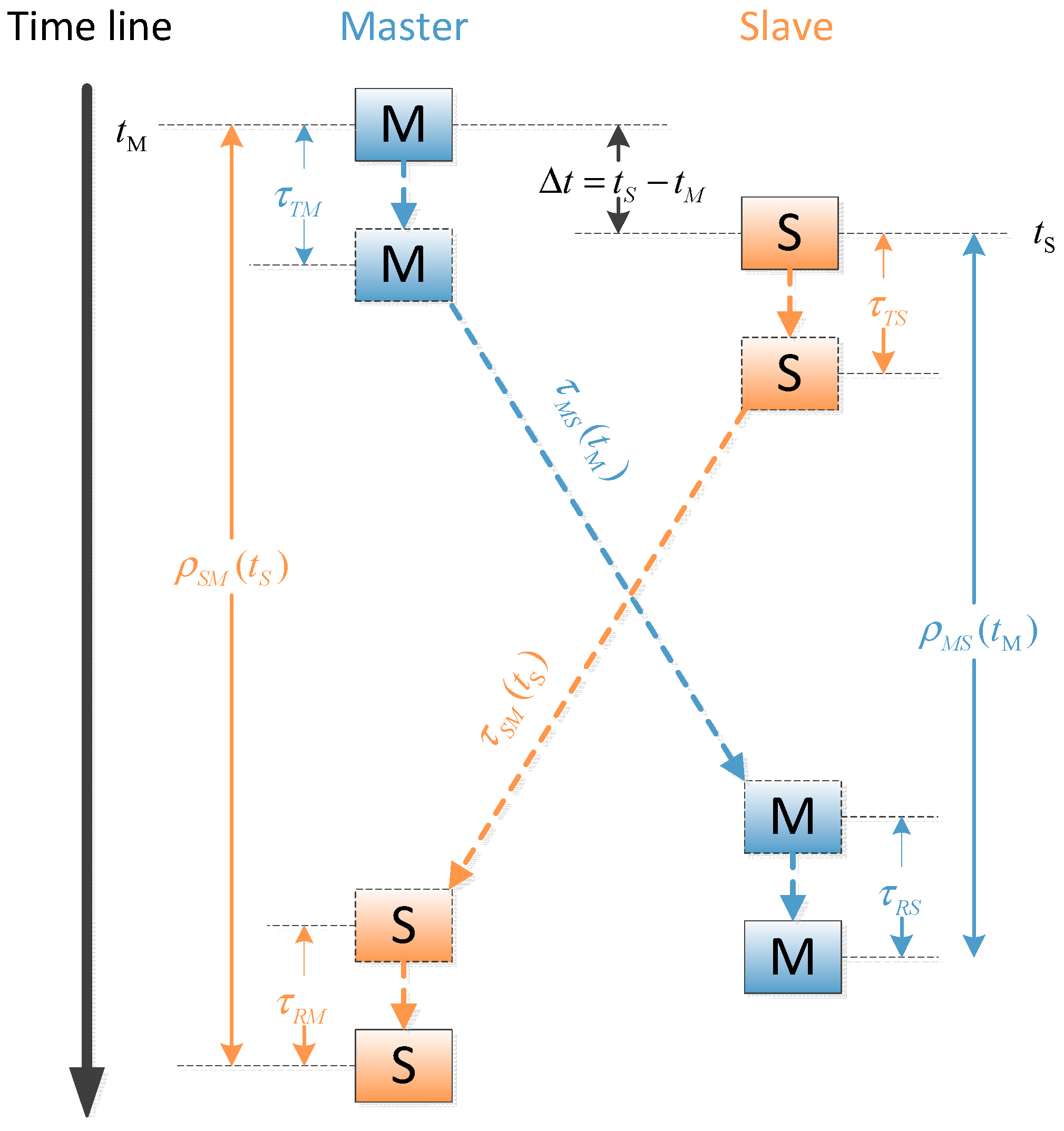
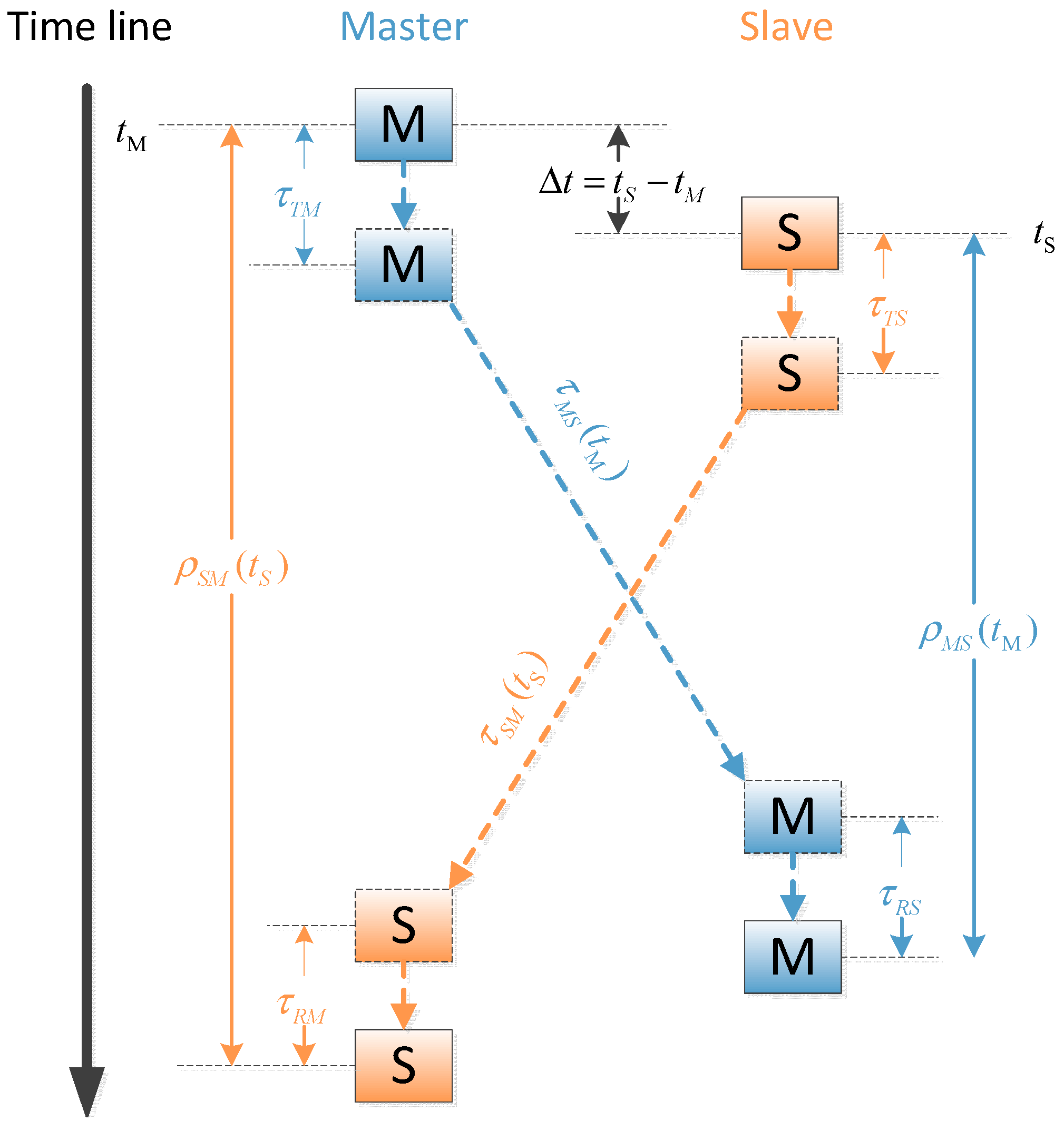
2.2. Ranging Measurement

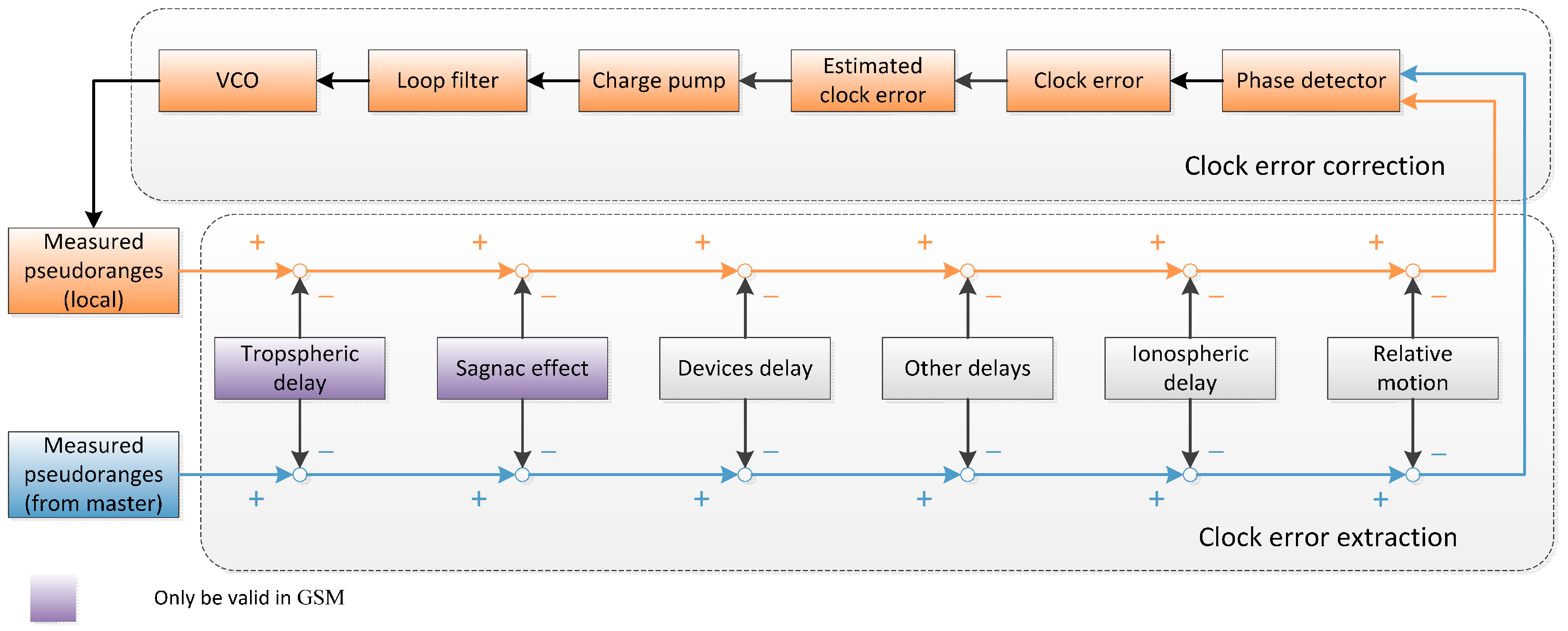
2.3. Adjustment Method

| Delays | Correction Method |
|---|---|
| Ionospheric delay | Dual-frequency correction |
| Device delay | Pre-calibration |
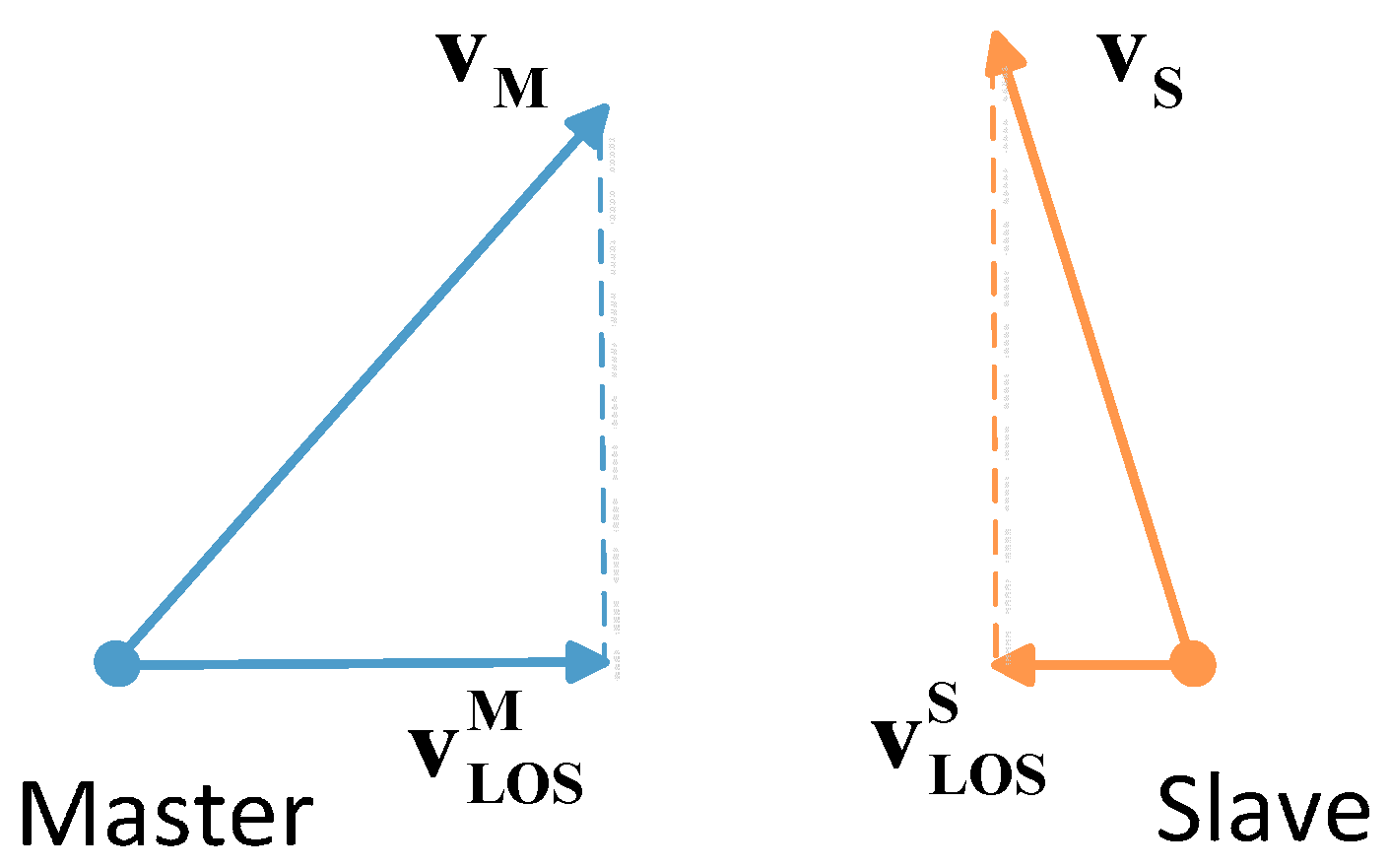
| Relative motion delay | Relative motion compensation |
| Ideal propagation delay | Dual one way ranging measurement |
| Delays only exist in GSM | Correction method |
| Tropospheric delay Sagnac effect | EGNOS tropospheric correction model Sagnac correction |
3. Case Study and Simulation
| Number | Designation | RWFM | FFM | WFM | FPM | WPM |
|---|---|---|---|---|---|---|
| 1 | at s | 1.2 × 10−11 | 1.0 × 10−10 | 1.0 × 10−10 | 1.0 × 10−9 | 1.0 × 10−9 |
| 2 | at s | 1.2 × 10−12 | 1.0 × 10−11 | 1.0 × 10−11 | 1.0 × 10−10 | 1.0 × 10−10 |
| 3 | at s | 1.2 × 10−13 | 1.0 × 10−12 | 1.0 × 10−12 | 1.0 × 10−11 | 1.0 × 10−11 |
| 4 | at s | 1.2 × 10−14 | 1.0 × 10−13 | 1.0 × 10−13 | 1.0 × 10−12 | 1.0 × 10−12 |
| Order of PLL | Parameters |
|---|---|
| Third order | a3 = 1.1 |
| b3 = 2.4 | |
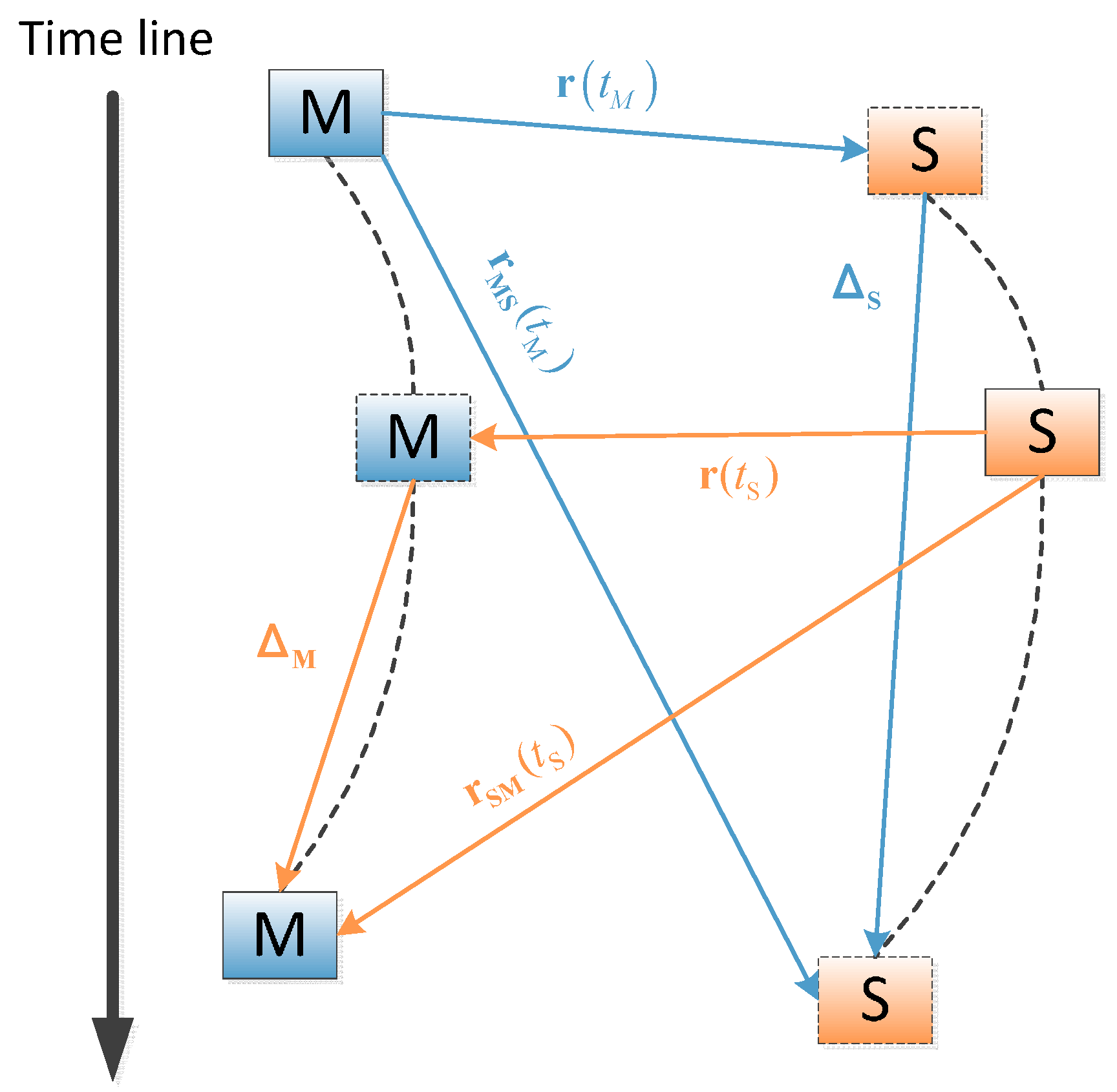
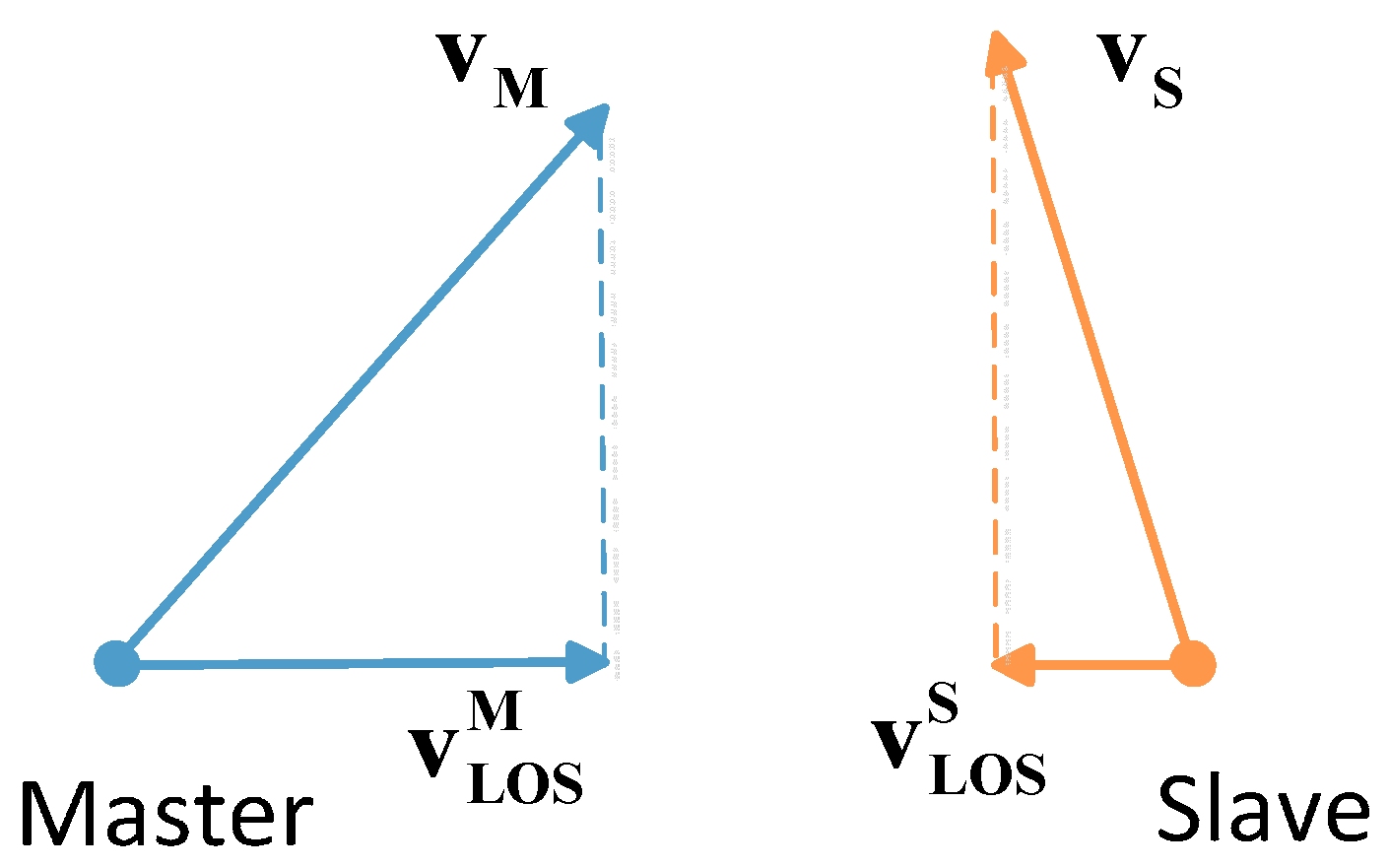
3.1. Relative Motion Compensation
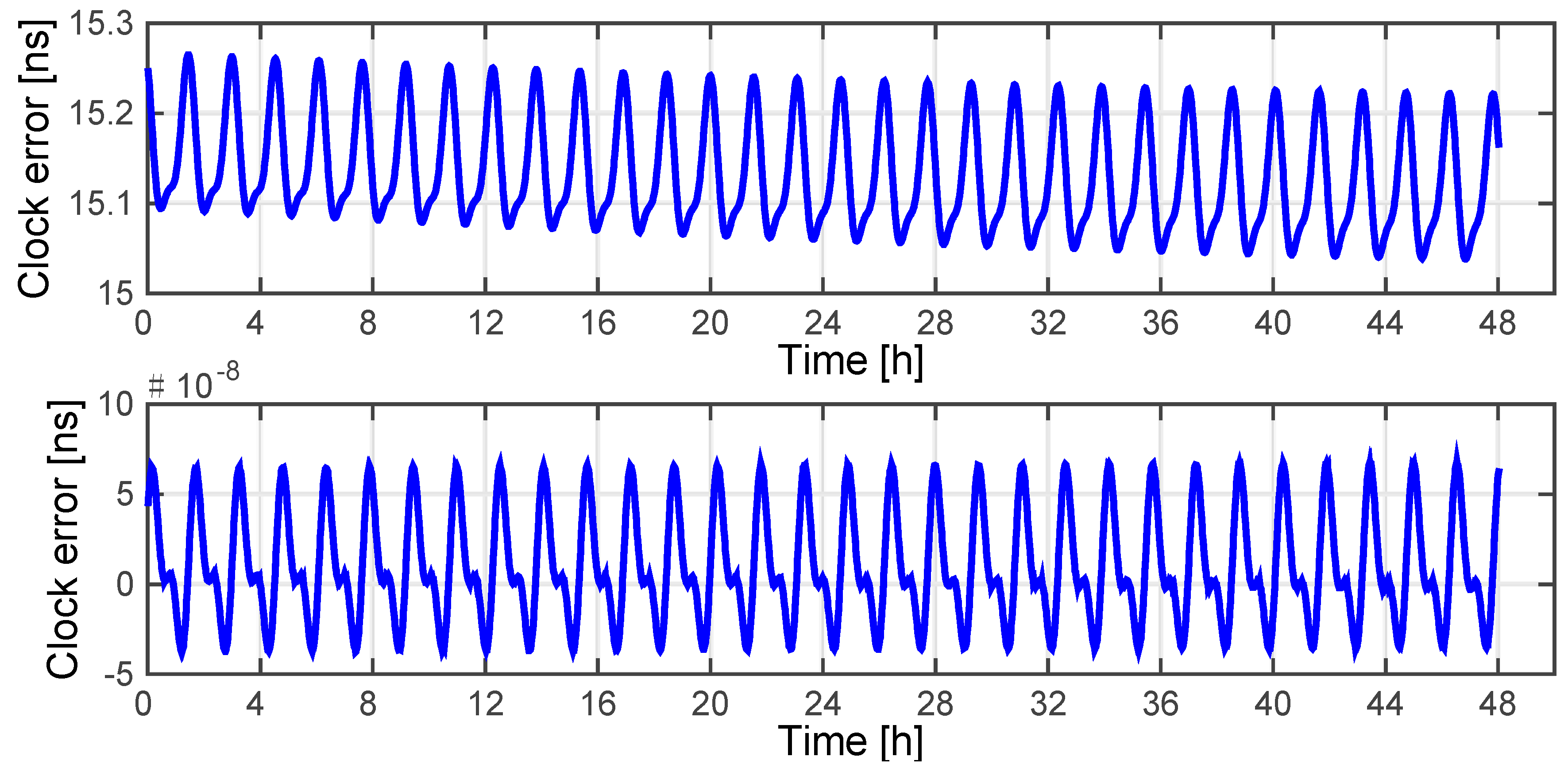

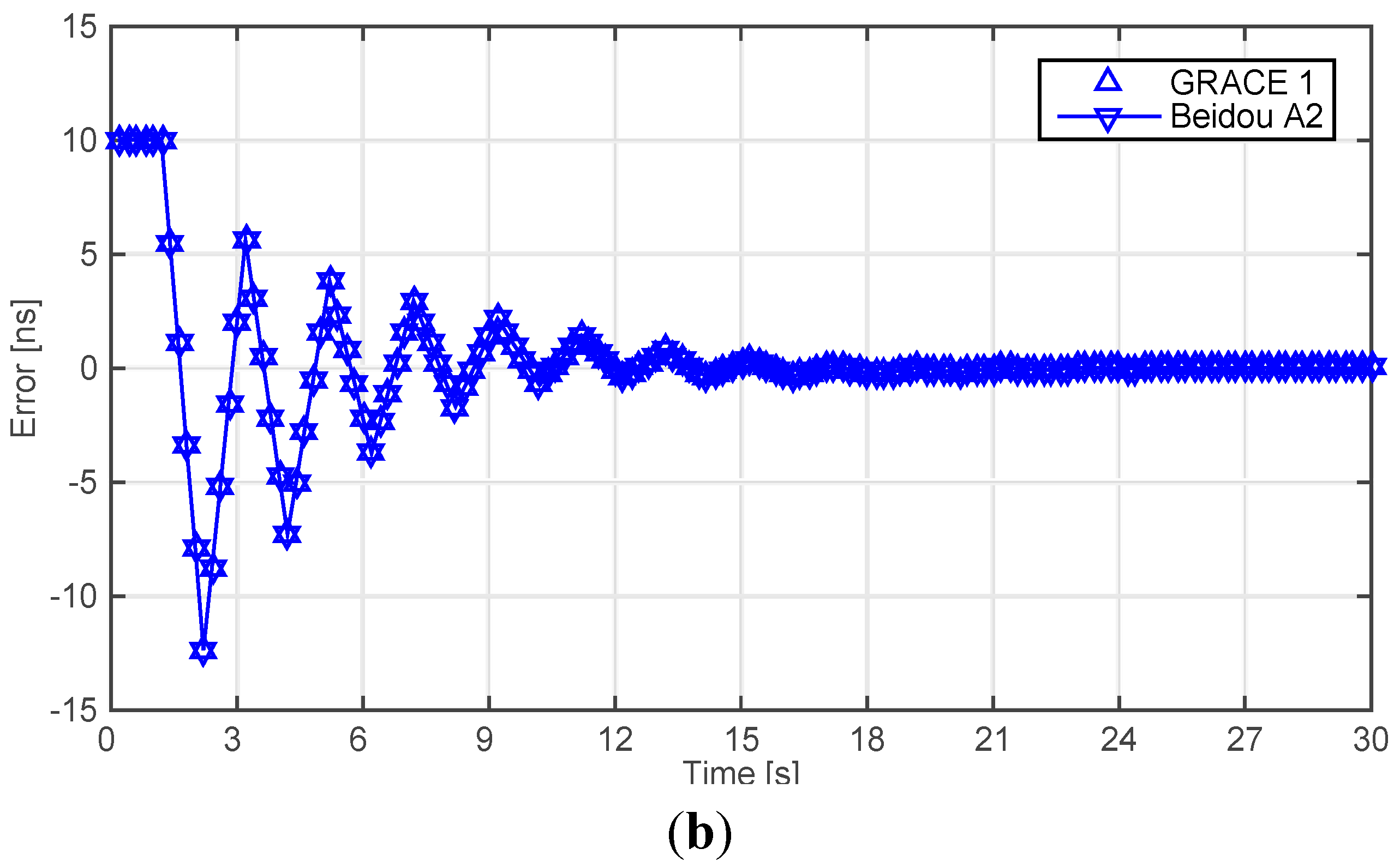
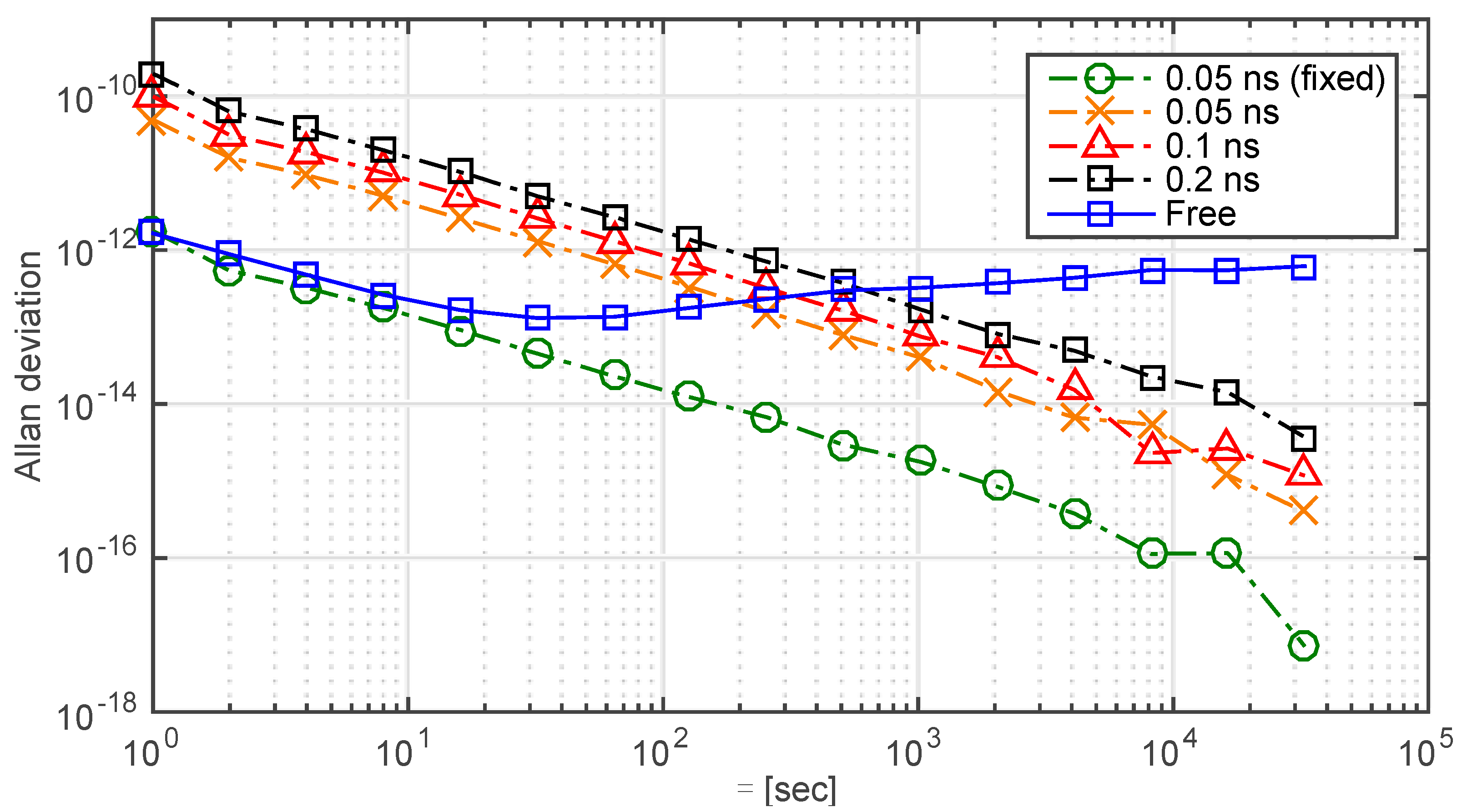
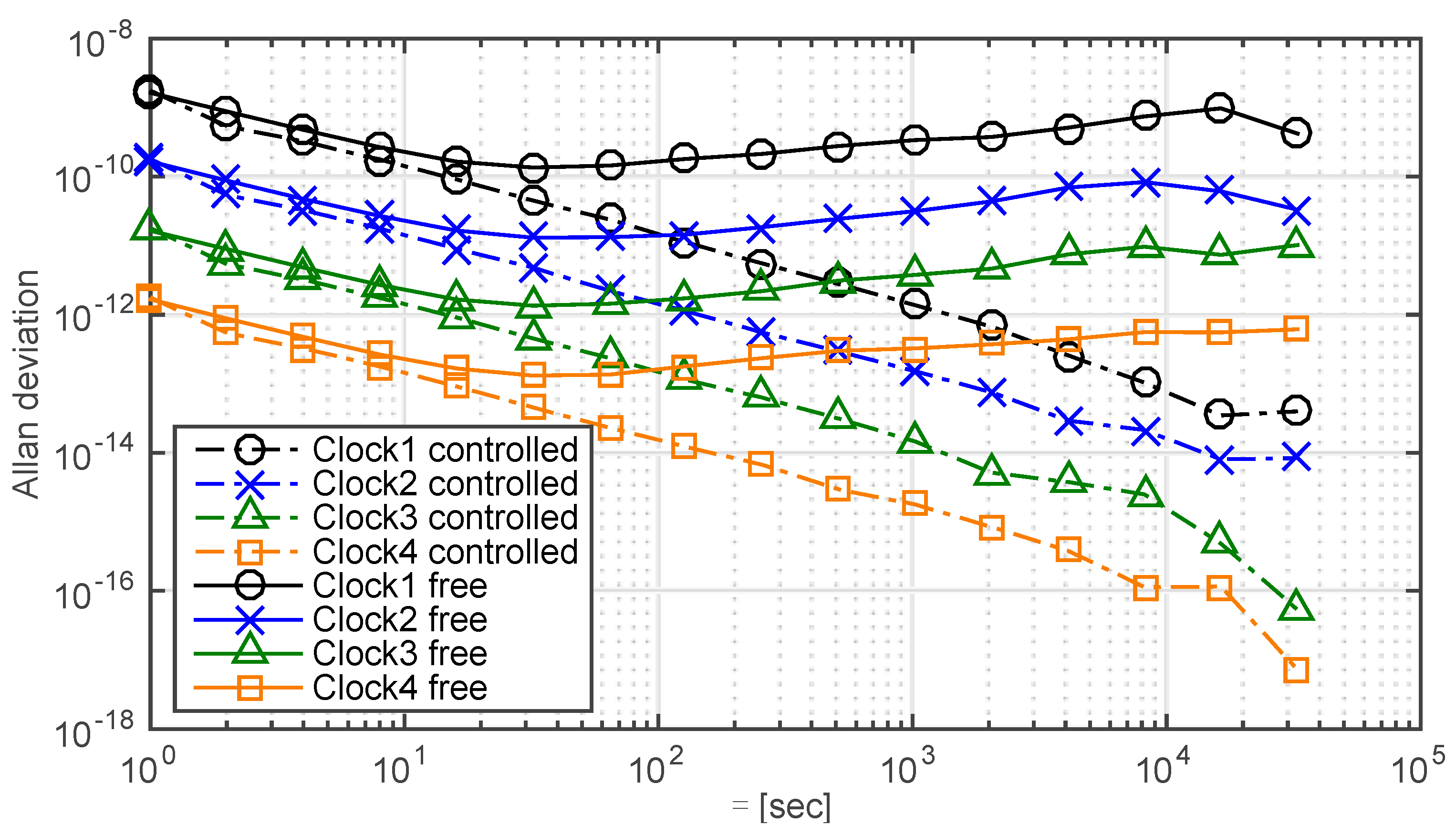
3.2. Clock Adjustment

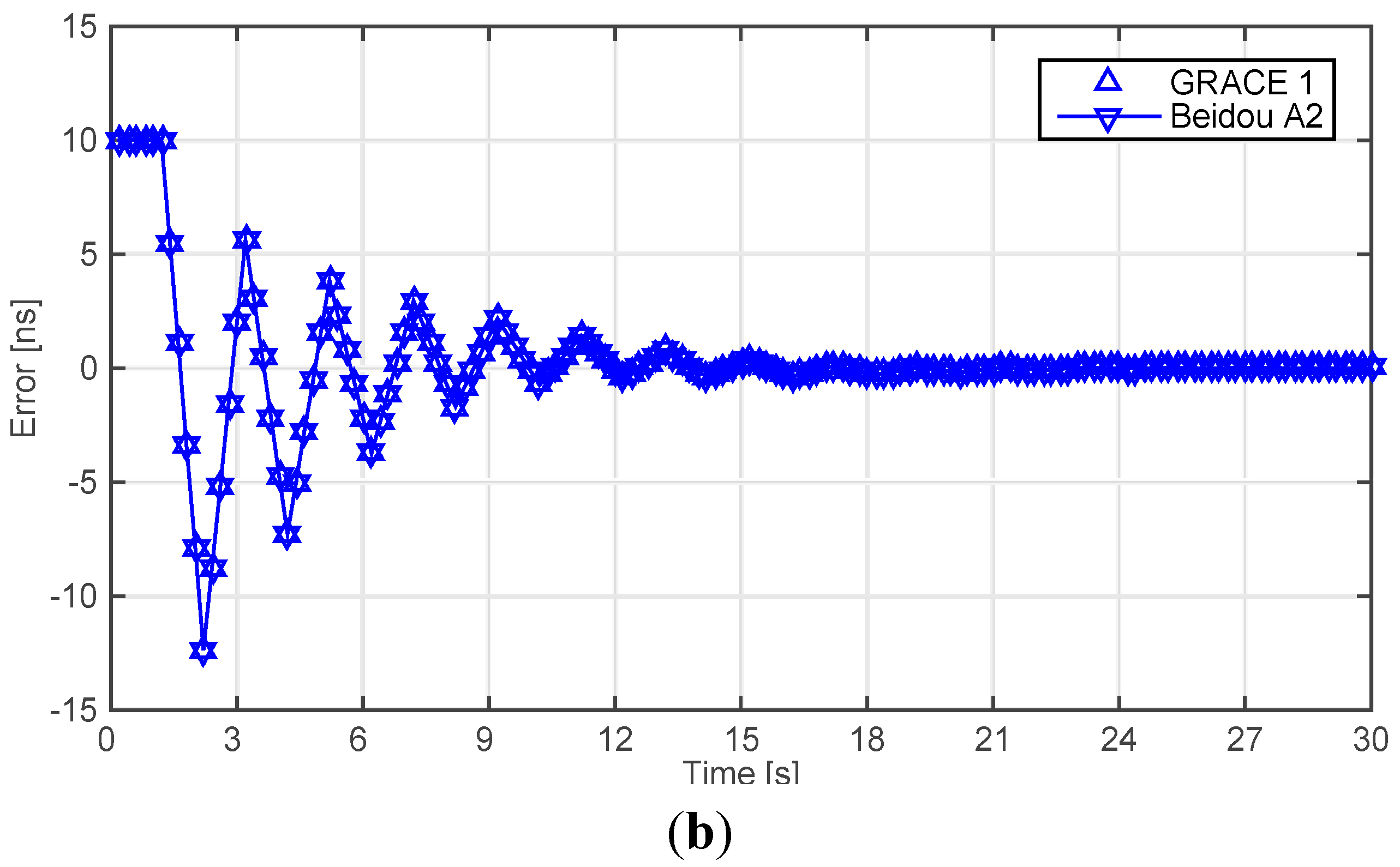
| Synchronization Error (Picosecond) | Scenarios | |
|---|---|---|
| GRACE | Beidou A2 & G1 | |
| Bias | 0.280 | 0.280 |
| RMSD | 40.816 | 40.818 |
| RMSE | 40.817 | 40.819 |
| Max error | 20.86 | 20.87 |
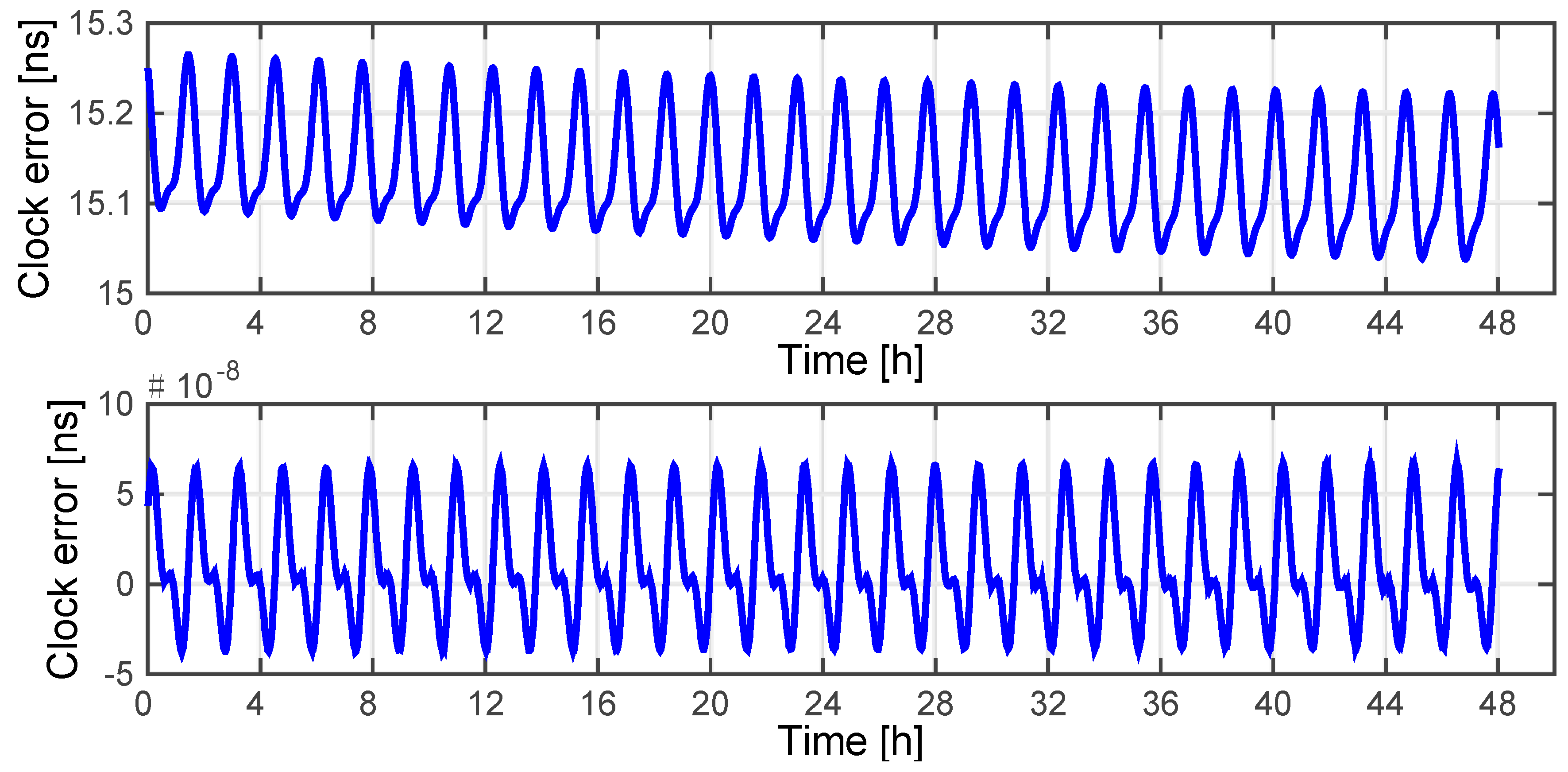
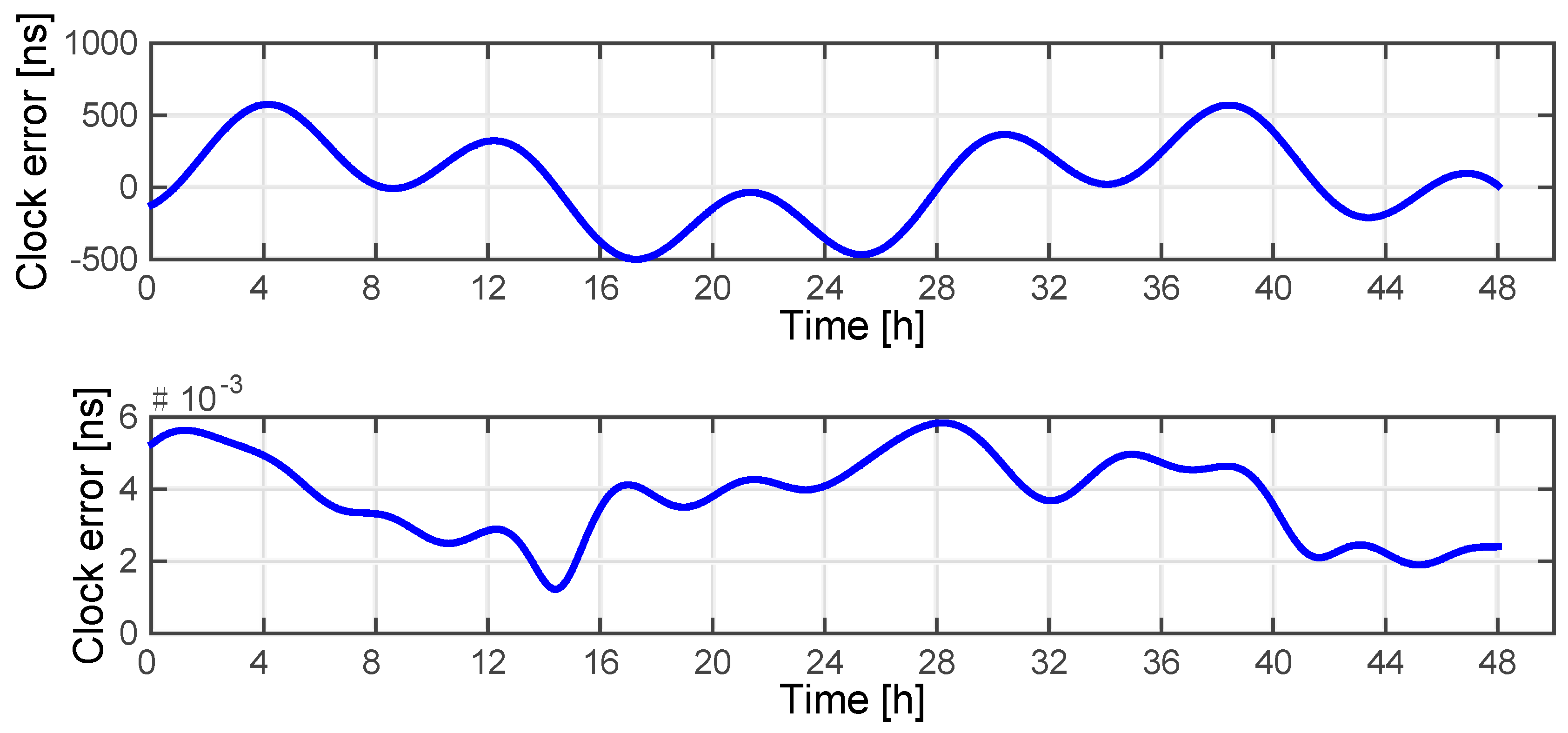
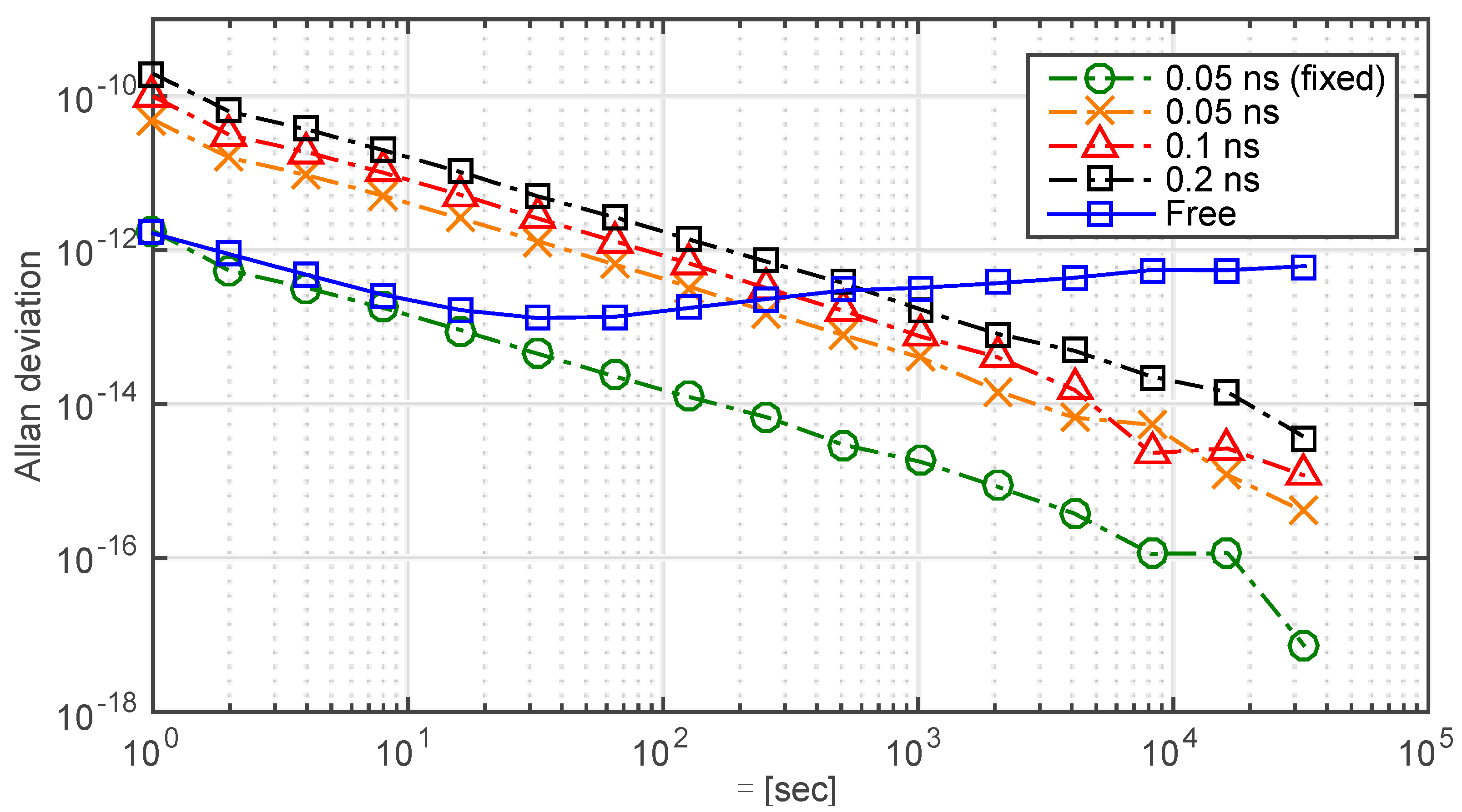
3.3. Residual Errors
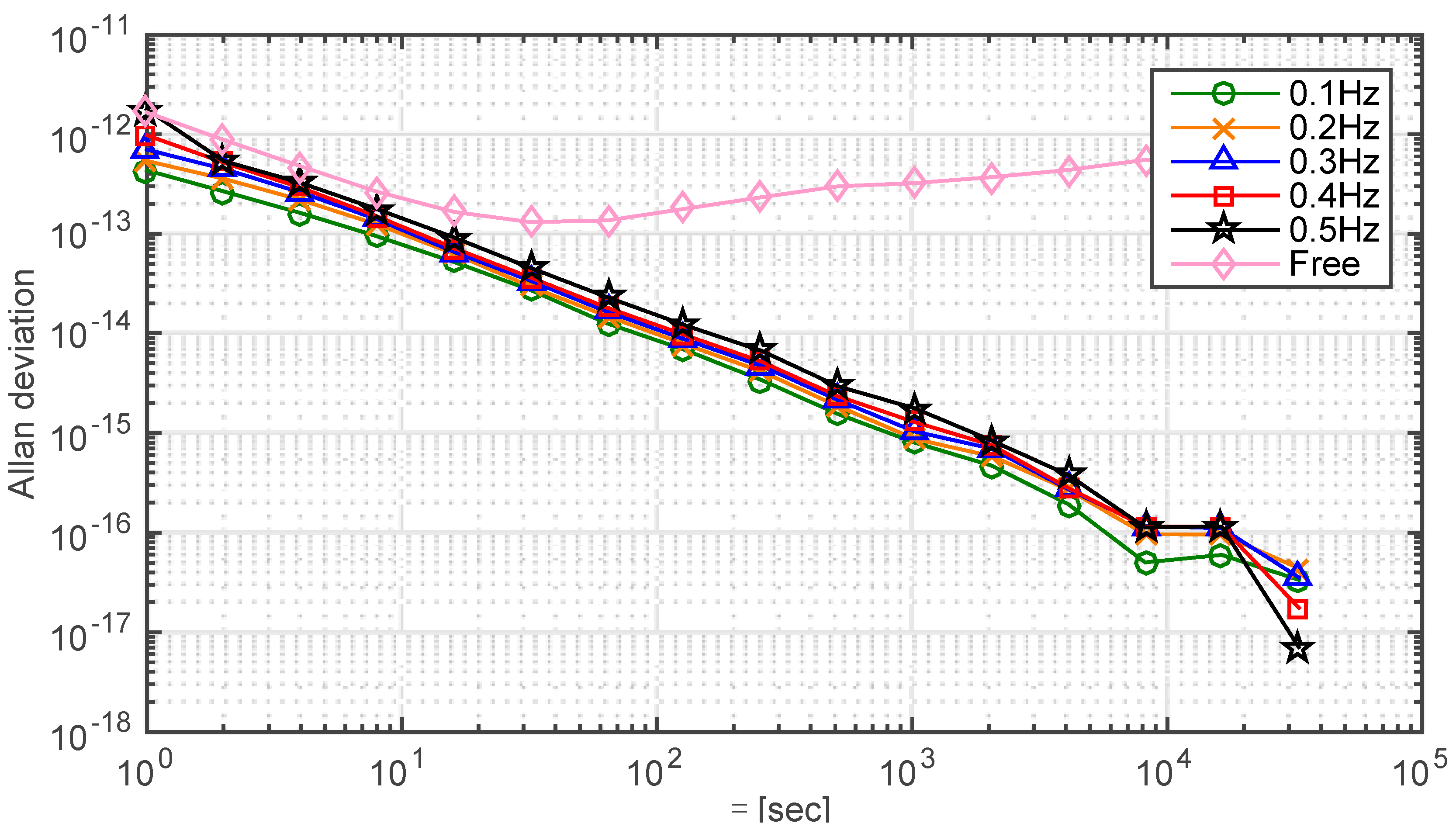
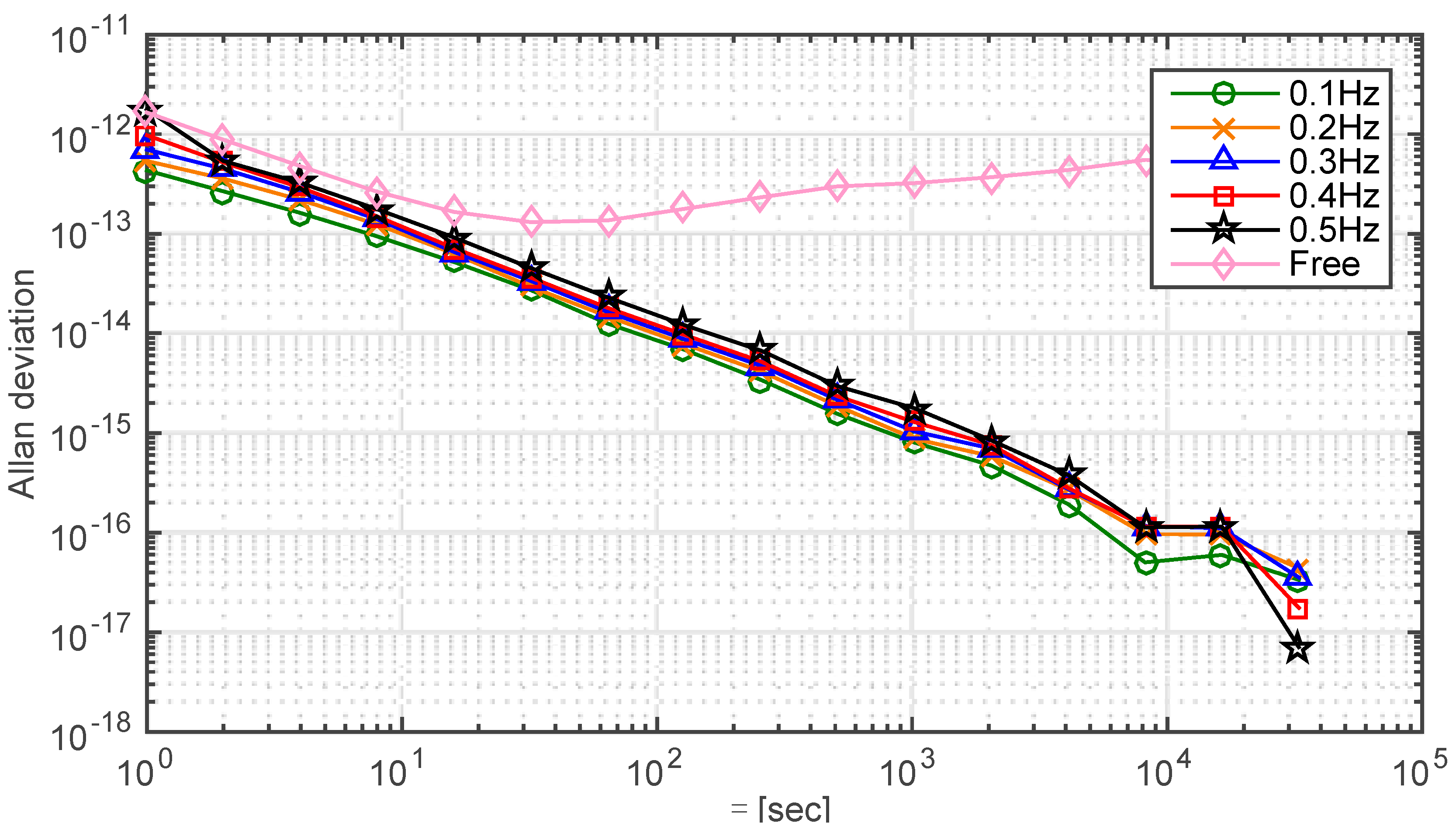
3.4. Bandwidth of the Control Loop
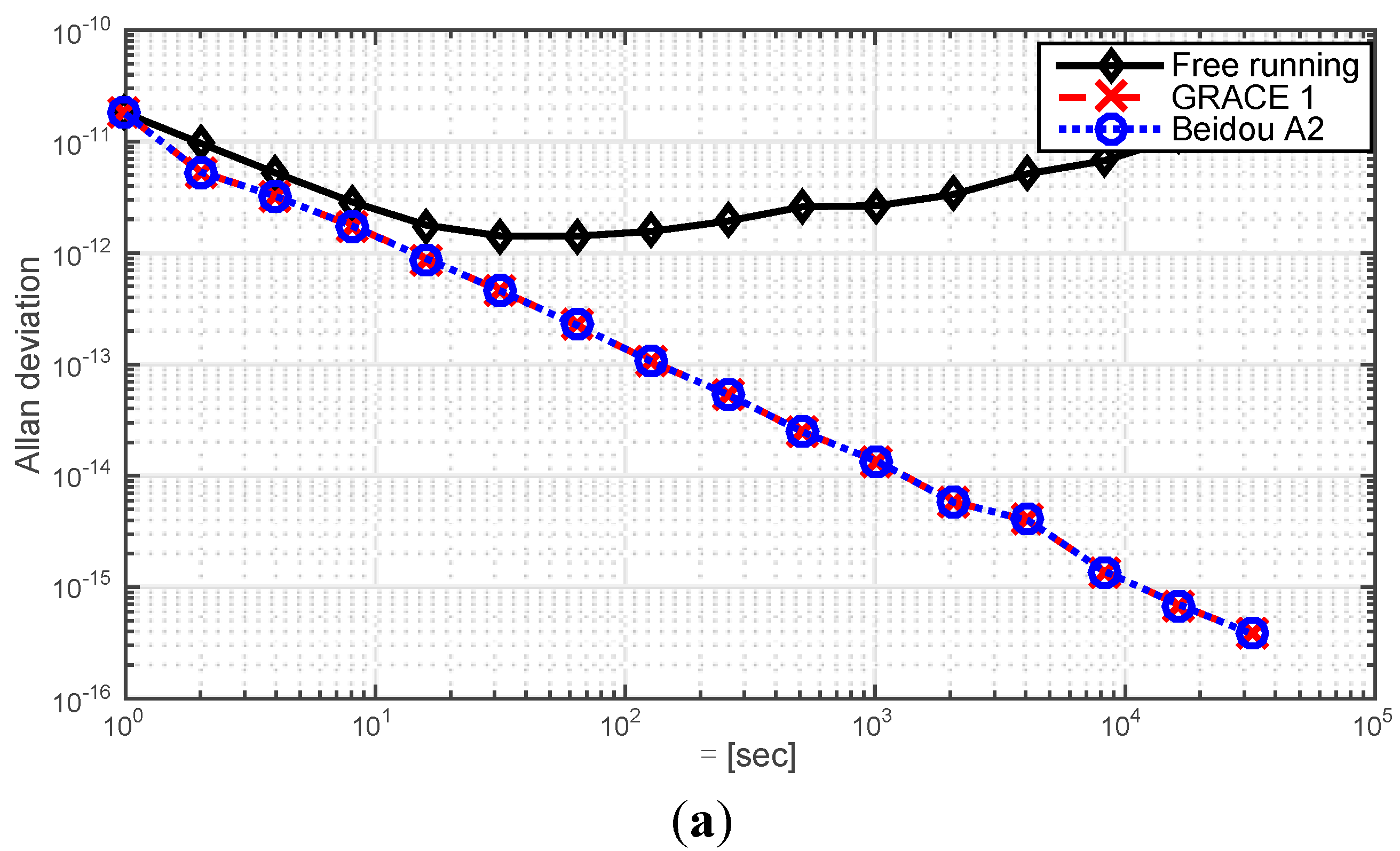
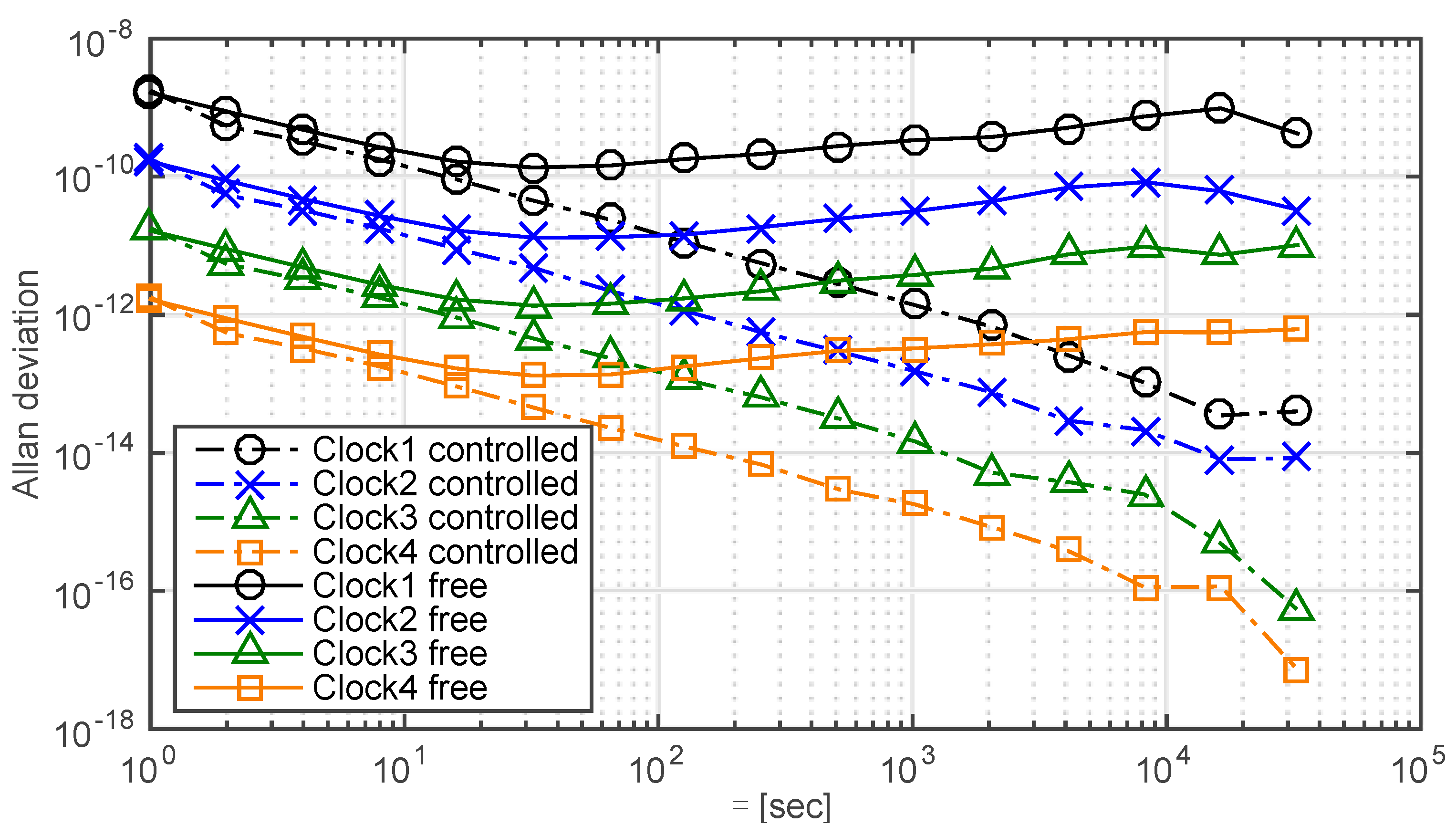
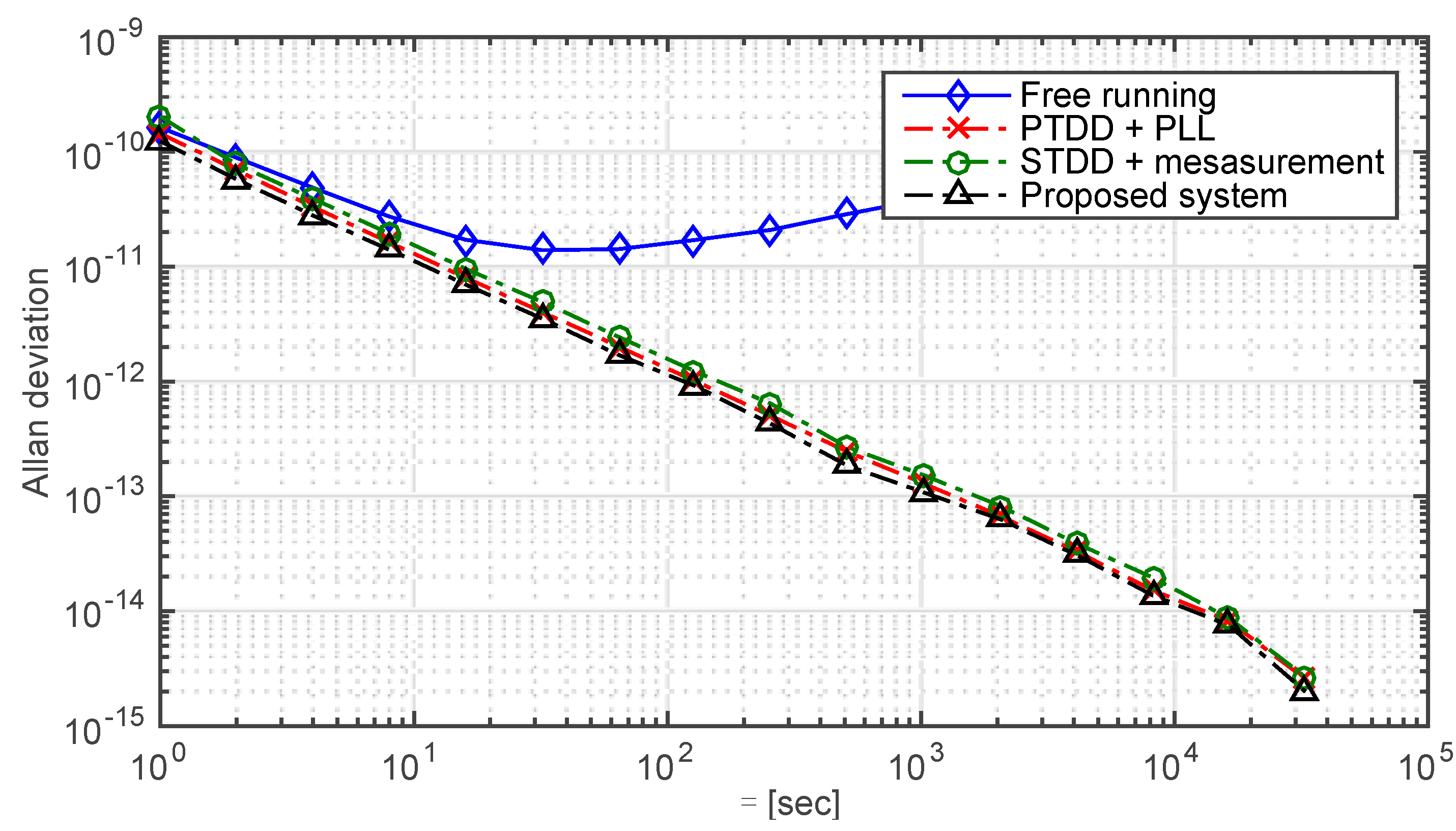
3.5. System Performance
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Kim, J.; Tapley, B.D. Simulation of dual one-way ranging measurements. J. Spacecr. Rockets 2003, 40, 419–425. [Google Scholar] [CrossRef]
- Kim, J. Simulation Study of a Low-Low Satellite-to-Satellite Tracking Mission. Ph.D. Thesis, The University of Texas, Austin, TX, USA, 2000. [Google Scholar]
- Rawicz, H.C.; Epstein, M.A.; Rajan, J.A. The time keeping system for GPS Block IIR. In Proceedings of the 24th Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting, McLean, VA, USA, 1–3 December 1992.
- Bradford, P.W.; Spilker, J.; Enge, P. Global Positioning System: Theory and Applications; AIAA: Washington, DC, USA, 1996. [Google Scholar]
- Tappero, F.; Dempster, A.; Iwata, T.; Imae, M.; Ikegami, T.; Fukuyama, Y.; Iwasaki, A. Proposal for a novel remote synchronization system for the on-board crystal oscillator of the quasi-zenith satellite system. Navigation 2006, 53, 219–229. [Google Scholar] [CrossRef]
- Iwata, T.; Kawasaki, Y.; Imae, M.; Suzuyama, T.; Matsuzawa, T.; Fukushima, S.; Hashibe, Y.; Takasaki, N.; Kokubu, K.; Iwasaki, A.; et al. Remote Synchronization System of Quasi-Zenith Satellites Using Multiple Positioning Signals for Feedback Control. Navigation 2007, 54, 99–108. [Google Scholar] [CrossRef]
- Iwata, T.; Matsuzawa, T.; Machita, K.; Kawauchi, T.; Ota, S.; Fukuhara, Y.; Hiroshima, T.; Tokita, K.; Takahashi, T.; Horiuchi, S.; et al. Demonstration Experiments of a Remote Synchronization System of an Onboard Crystal Oscillator Using “MICHIBIKI”. Navigation 2013, 60, 133–142. [Google Scholar] [CrossRef]
- Glennon, E.P.; Gauthier, J.P.; Choudhury, M.; Dempster, A.G. Synchronization and Syntonization of Formation Flying Cubesats Using the Namuru V3.2 Spaceborne GPS Receiver. In Proceedings of the the ION 2013 Pacific PNT Meeting, Honolulu, HI, USA, 23–25 April 2013; pp. 588–597.
- Maine, K.P.; Anderson, P.; Langer, J. Crosslinks for the next-generation GPS. In Proceedings of the 2003 IEEE Aerospace Conference, Los Angeles, CA, USA, 8–15 March 2003; pp. 1589–1596.
- Rajan, J.A. Highlights of GPS II-R autonomous navigation. In Proceedings of the 58th Annual Meeting of the Institute of Navigation and CIGTF 21st Guidance Test Symposium, Albuquerque, NM, USA, 24–26 June 2001; pp. 354–363.
- Wang, Z.B.; Zhao, L.; Wang, S.G.; Zhang, J.W.; Wang, B.; Wang, L.J. COMPASS time synchronization and dissemination—Toward centimetre positioning accuracy. Sci. China Phys. Mech. Astron. 2014, 57, 1788–1804. [Google Scholar] [CrossRef]
- Rodríguez-Pérez, I.; García-Serrano, C.; Catalán, C.C.; García, A.M.; Tavella, P.; Galleani, L.; Amarillo, F. Inter-satellite links for satellite autonomous integrity monitoring. Adv. Space Res. 2011, 47, 197–212. [Google Scholar] [CrossRef]
- Rajan, R.T.; van der Veen, A.J. Joint ranging and clock synchronization for a wireless network. In Proceedings of the 2011 4th IEEE International Workshop on Computational Advances in Multi-Sensor Adaptive Processing (CAMSAP), San Juan, Puerto Rico, 13–16 December 2011; pp. 297–300.
- Xu, Y.; Chang, Q.; Yu, Z.J. On new measurement and communication techniques of GNSS inter-satellite links. Sci. China Technol. Sci. 2012, 55, 285–294. [Google Scholar] [CrossRef]
- Buist, P.J.; Teunissen, P.J.G.; Giorgi, G.; Verhagen, S. Functional model for spacecraft formation flying using non-dedicated GPS/Galileo receivers. In Proceedings of the 2010 5th ESA Workshop on Satellite Navigation Technologies and European Workshop on GNSS Signals and Signal Processing (NAVITEC), Noordwijk, Holland, 8–10 December 2010; pp. 1–6.
- Rajan, R.T.; van der Veen, A.J. Joint ranging and synchronization for an anchorless network of mobile nodes. IEEE Trans Signal Process. 2015, 63, 1925–1940. [Google Scholar] [CrossRef]
- Kiesel, S.; Ascher, C.; Gramm, D.; Trommer, G.F. GNSS Receiver with Vector Based FLL-Assisted PLL Carrier Tracking Loop. In Proceedings of ION GNSS 2008, Savannah, GA, USA, 16–19 September 2008; pp. 197–203.
- Allan, D.W. Time and frequency (time-domain) characterization, estimation, and prediction of precision clocks and oscillators. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1987, 34, 647–654. [Google Scholar] [CrossRef] [PubMed]
- Rebeyrol, E.; Macabiau, C.; Ries, L.; LucIssler, L.; Bousquet, M.; Boucheret, M.L. Phase noise in GNSS transmission/reception system. In Proceedings of the 2006 National Technical Meeting of the Institute of Navigation, Monterey, CA, USA, 18–20 January 2006; pp. 698–708.
- Vig, J.R. IEEE Standard Definitions of Physical Quantities for Fundamental Frequency and Time Metrology-Random Instabilities; IEEE Standard: New York, NY, USA, 1999. [Google Scholar]
- Van Dierendonck, A.J.; McGraw, J.B.; Brown, R.G. Relationship between ALLAN Variances and Kalman Filter Parameters; Stanford Telecommunications Inc Santa Clara Ca: Anta Clara, CA, USA, 1984. [Google Scholar]
- Allan, D.W.; Howe, D.A.; Walls, F.L. Characterization of Clocks and Oscillators. US Department of Commerce; National Institute of Standards and Technology: Boulder, CO, USA, 1990.
- Wornell, G.W. Wavelet-based representations for the 1/f family of fractal processes. IEEE Proc. 1993, 81, 1428–1450. [Google Scholar] [CrossRef]
- Kedar, S.; Hajj, G.A.; Wilson, B.D.; Heflin, M.B. The effect of the second order GPS ionospheric correction on receiver positions. Geophys. Res. Lett. 2003, 30. [Google Scholar] [CrossRef]
- Penna, N.; Dodson, A.; Chen, W. Assessment of EGNOS tropospheric correction model. J. Navig. 2001, 54, 37–55. [Google Scholar] [CrossRef]
- Bauch, A.; Piester, D.; Fujieda, M.; Lewandowski, W. Directive for operational use and data handling in two-way satellite time and frequency transfer (TWSTFT). Rapport BIPM 2011, 1, 25. [Google Scholar]
- CCSDS 211.1-B-4. Proximity-1 Space Link Protoco1—Data Link Layer. CCSDS Blue Book. Available online: http://public.ccsds.org/publications/SLS.aspx (accessed on 23 May 2015).
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gu, X.; Chang, Q.; Glennon, E.P.; Xu, B.; Dempster, A.G.; Wang, D.; Wu, J. An Autonomous Satellite Time Synchronization System Using Remotely Disciplined VC-OCXOs. Sensors 2015, 15, 17895-17915. https://doi.org/10.3390/s150817895
Gu X, Chang Q, Glennon EP, Xu B, Dempster AG, Wang D, Wu J. An Autonomous Satellite Time Synchronization System Using Remotely Disciplined VC-OCXOs. Sensors. 2015; 15(8):17895-17915. https://doi.org/10.3390/s150817895
Chicago/Turabian StyleGu, Xiaobo, Qing Chang, Eamonn P. Glennon, Baoda Xu, Andrew G. Dempster, Dun Wang, and Jiapeng Wu. 2015. "An Autonomous Satellite Time Synchronization System Using Remotely Disciplined VC-OCXOs" Sensors 15, no. 8: 17895-17915. https://doi.org/10.3390/s150817895