
Analysis of Intelligent Transportation Systems Using Model-Driven Simulations

Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Background
2.1. MDE
2.2. The Traffic Simulation Framework
2.3. The SN Development Framework
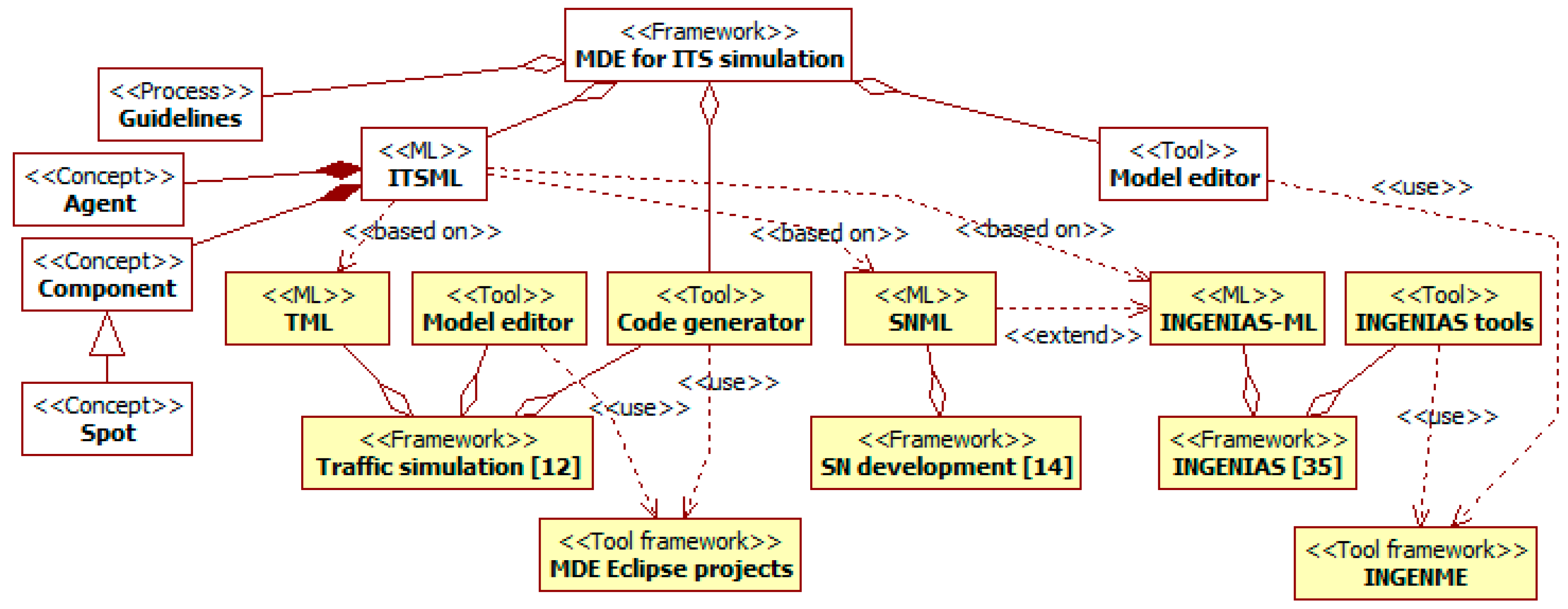
3. The MDE Framework for ITS Simulation
3.1. Modeling Language
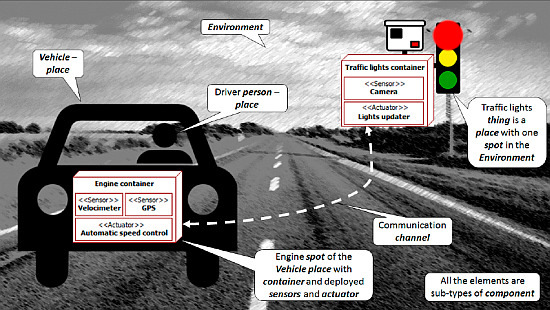
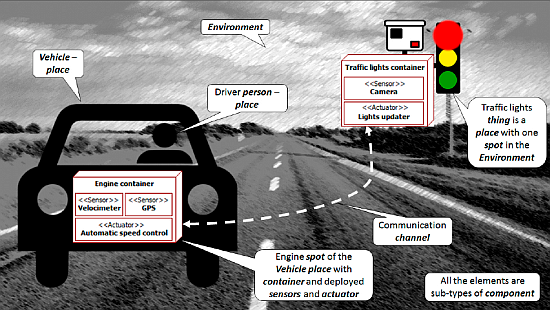
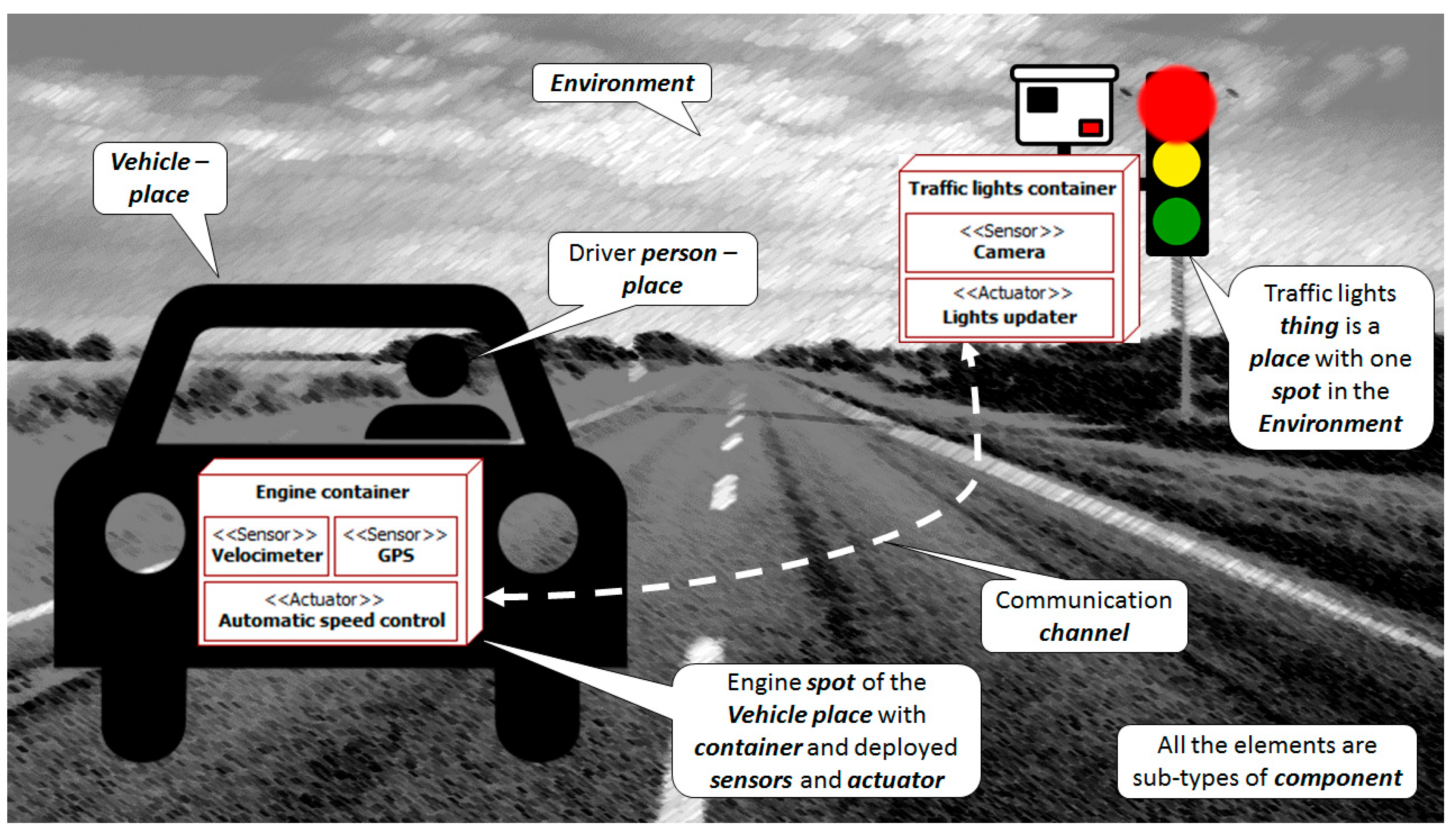
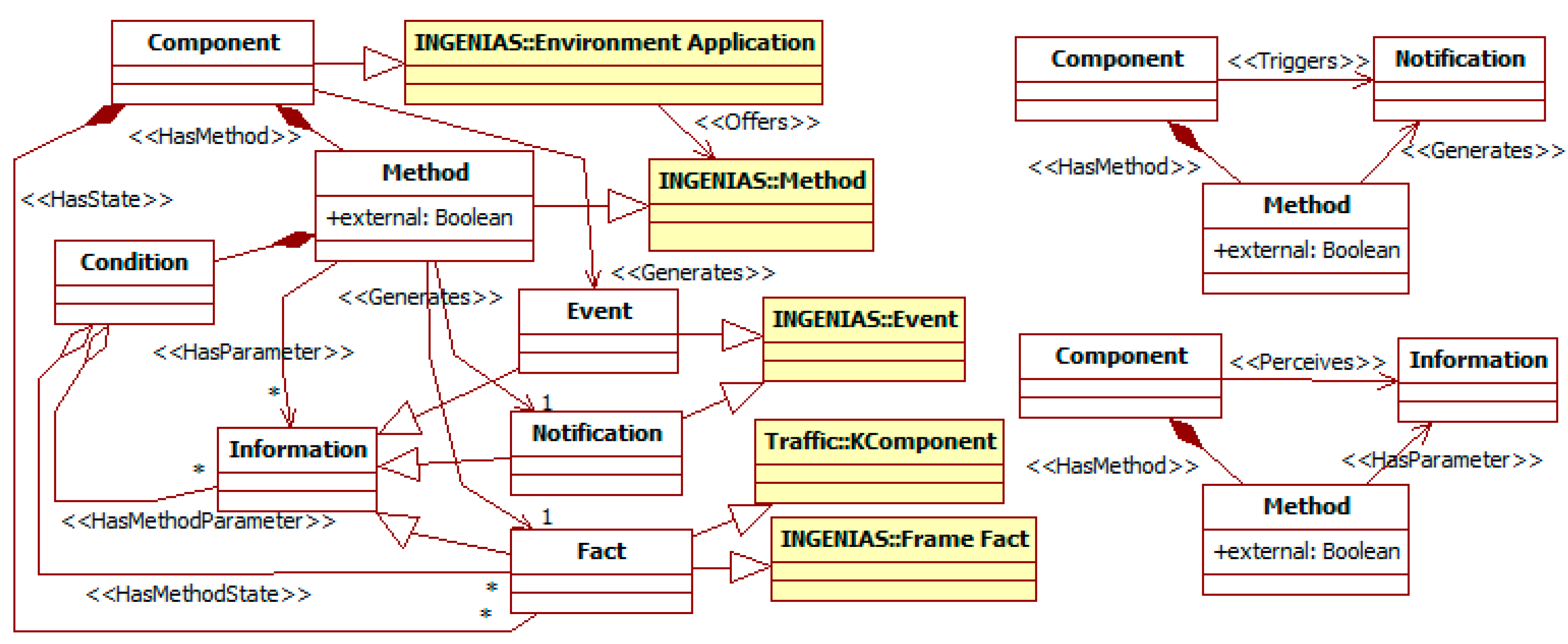
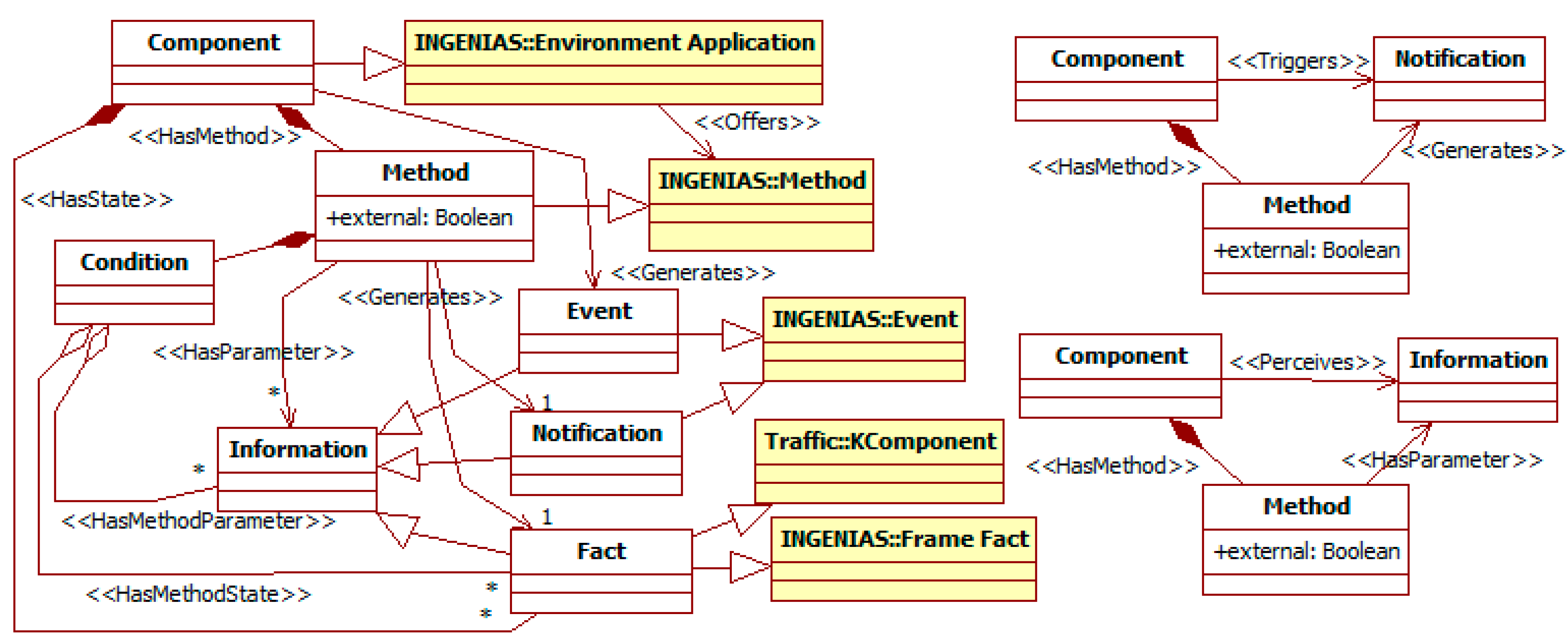
3.1.1. The Component Entity
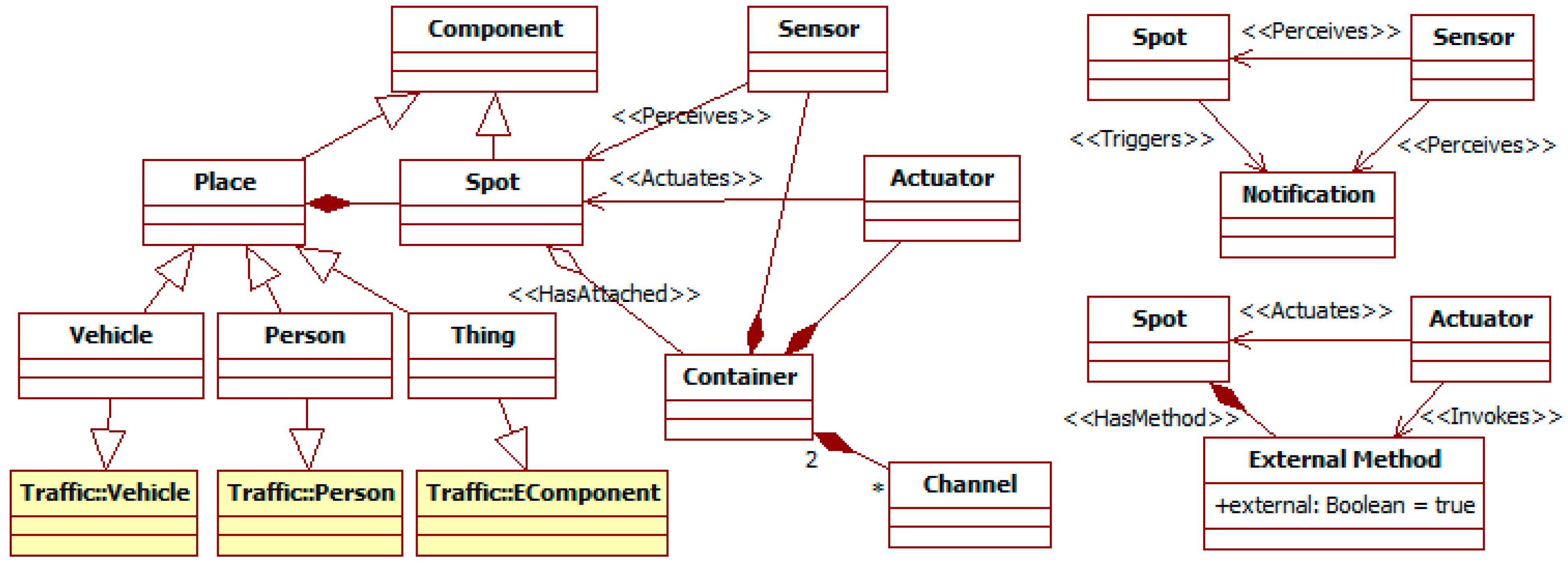
3.1.2. Place and Device Related Entities
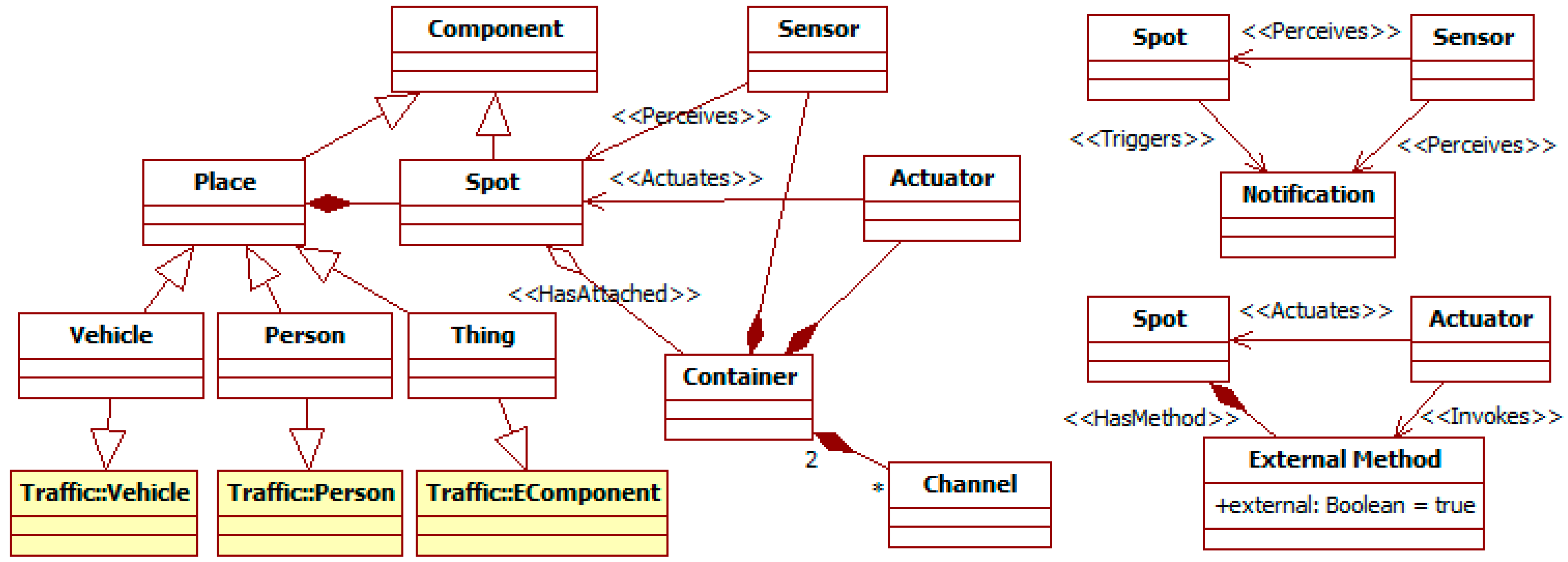
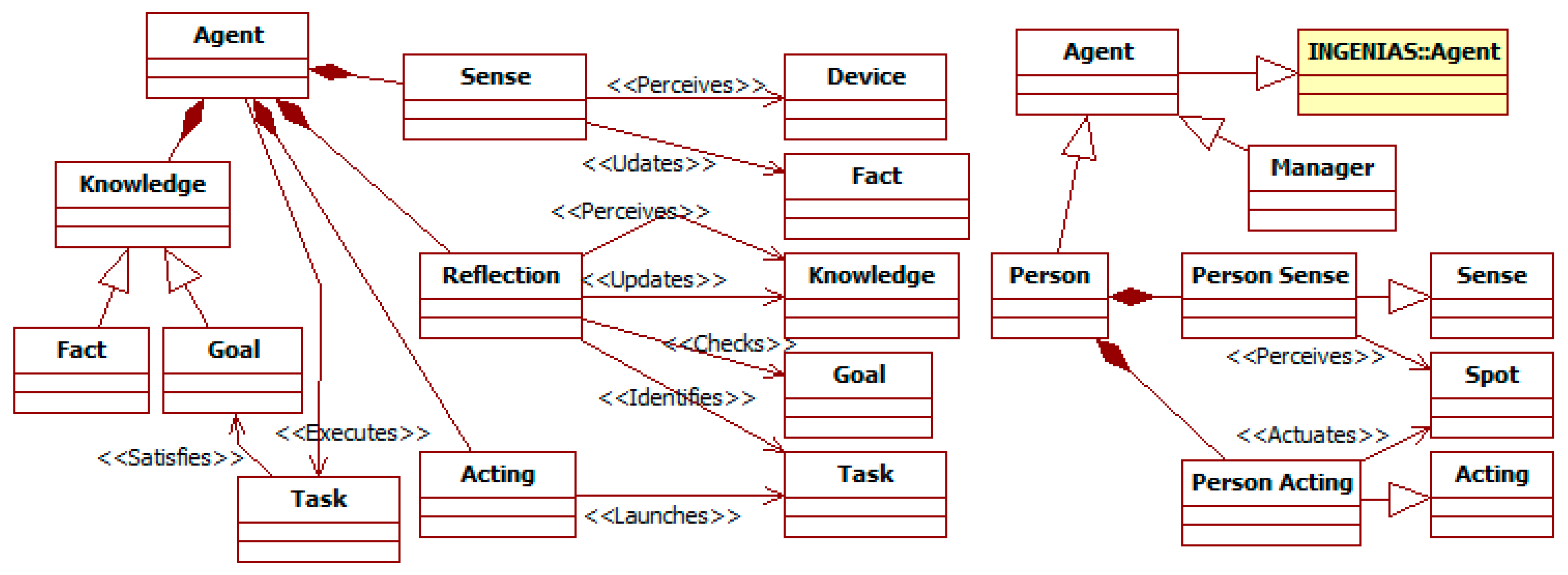
3.1.3. The Person and Manager Entities

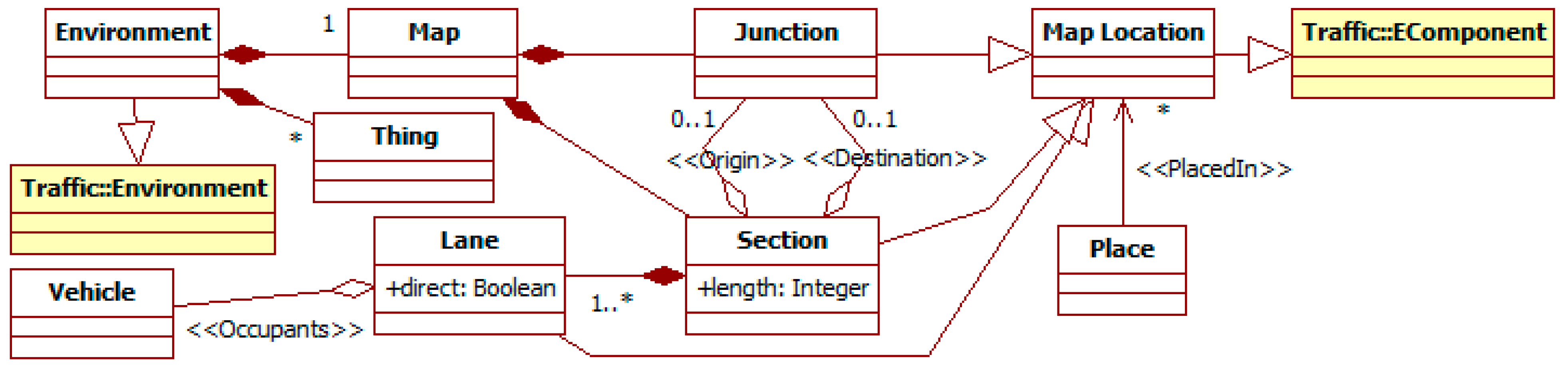
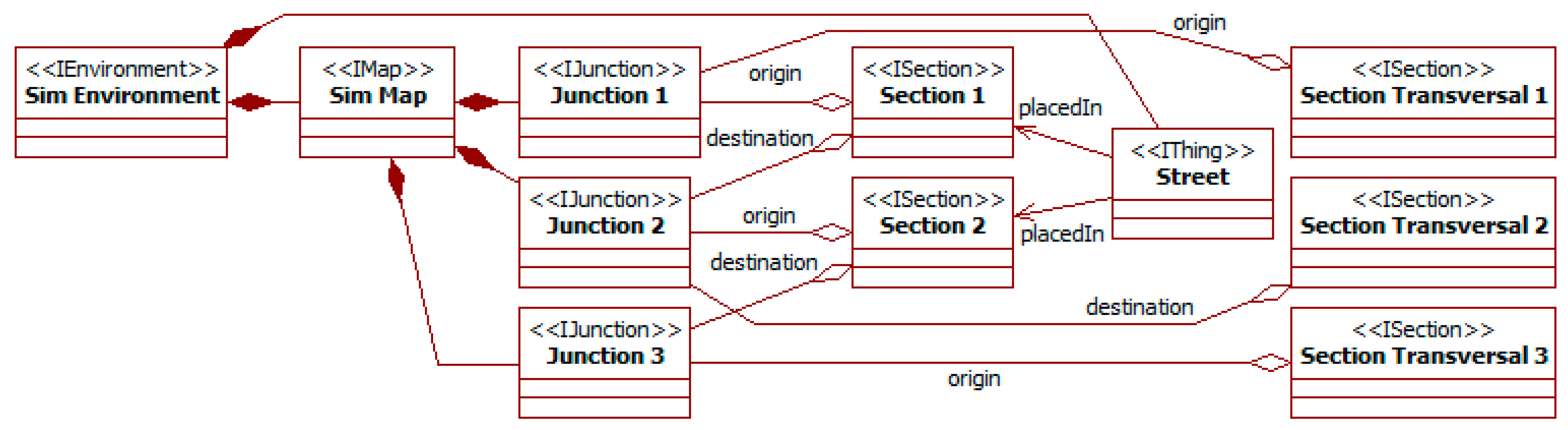
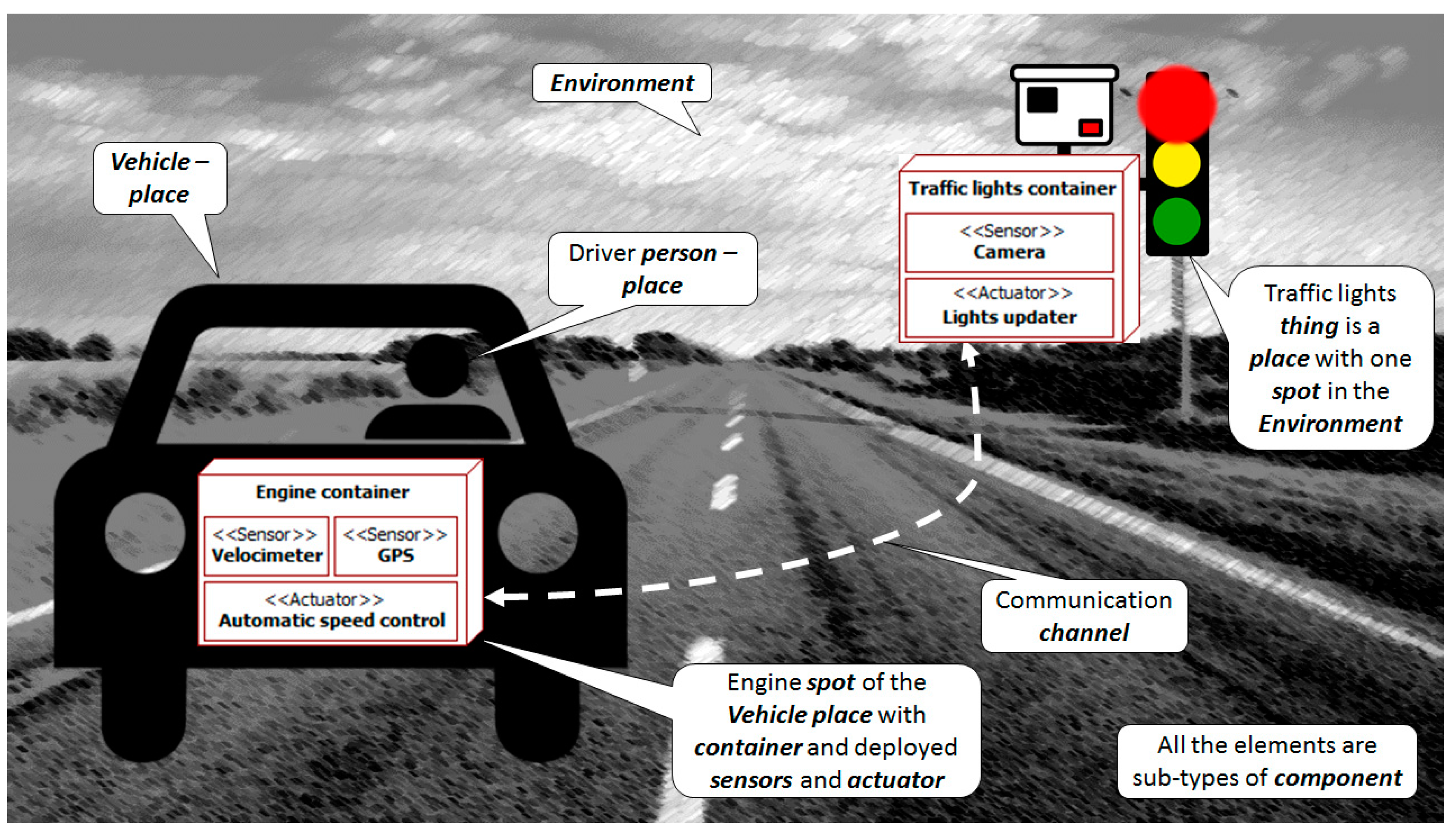
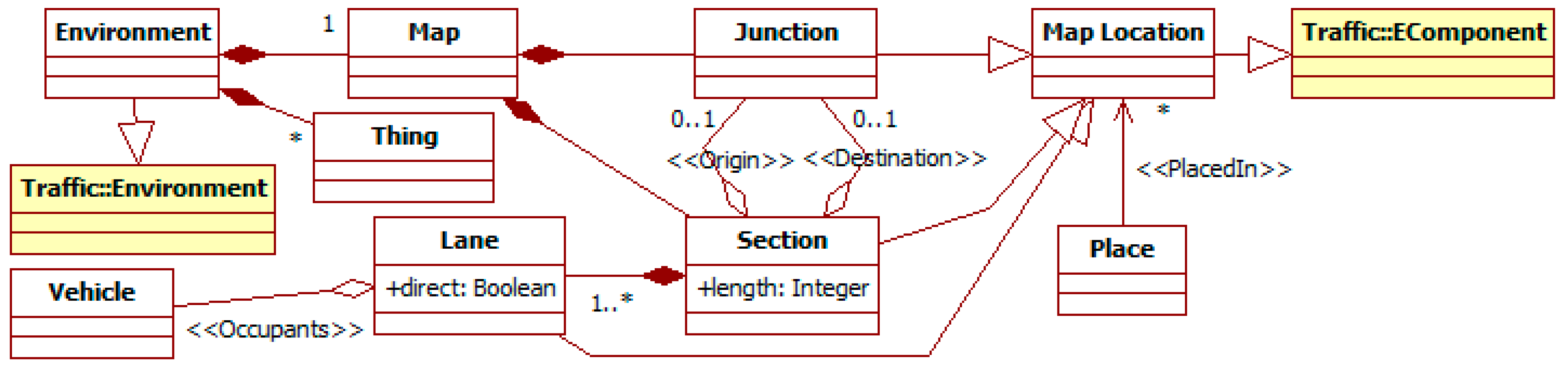
3.1.4. The Environment Entity
3.1.5. General Features
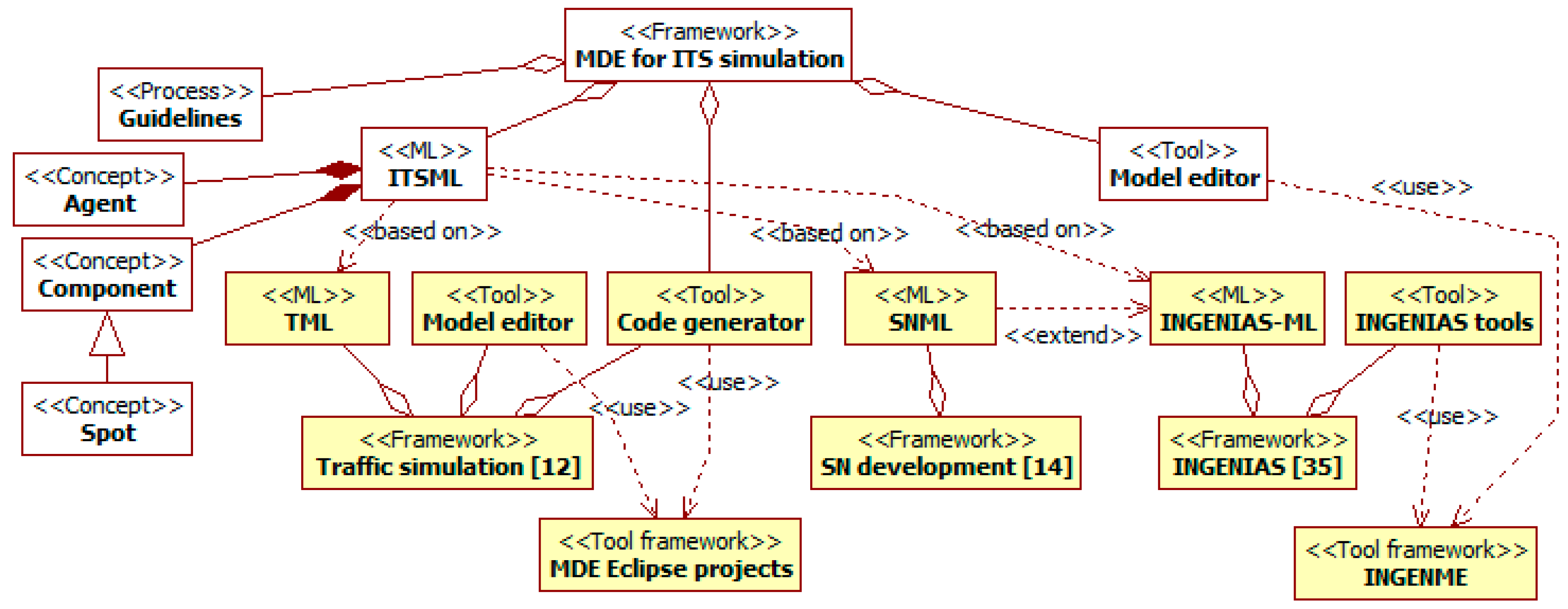
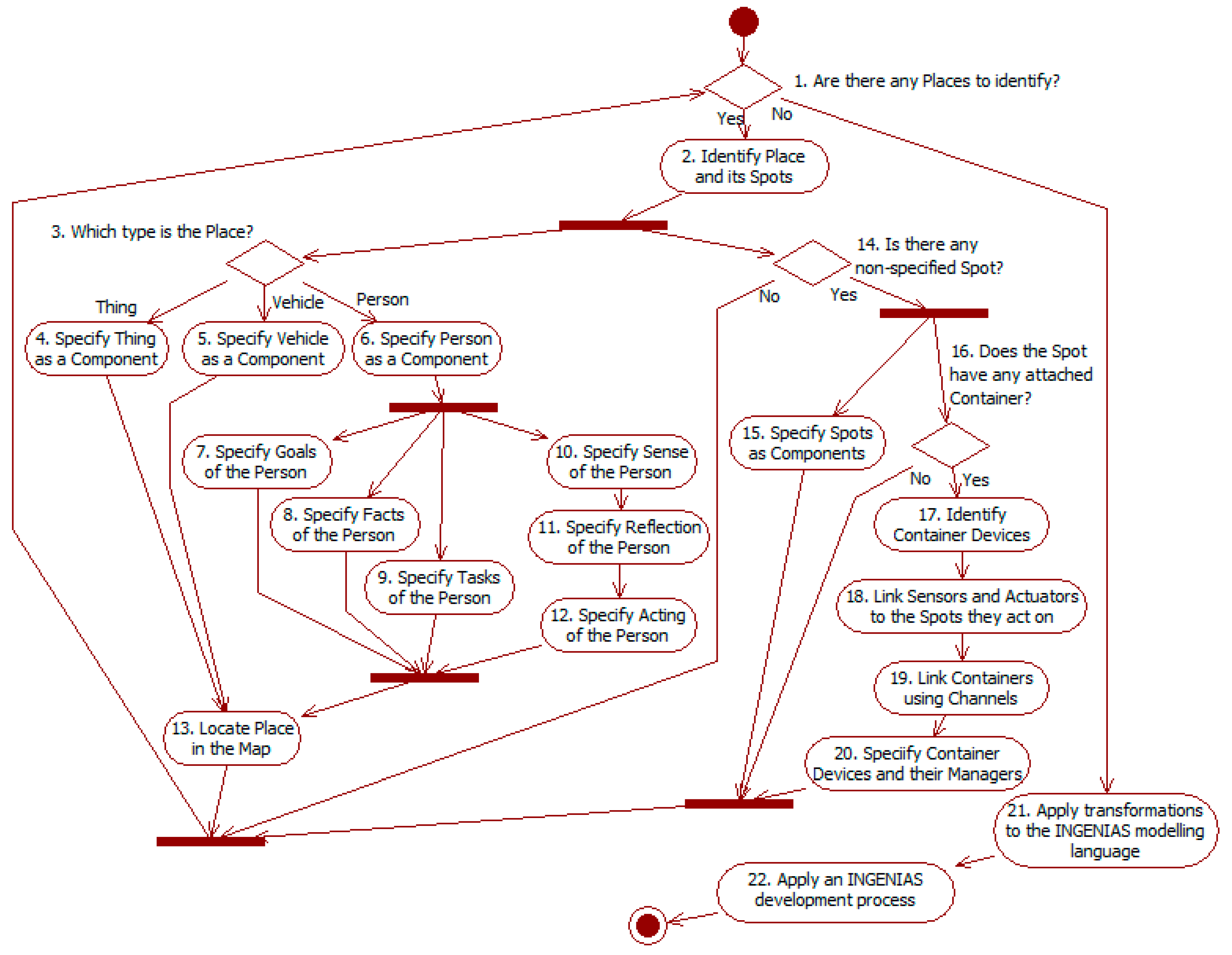
3.2. Development Guidelines and Tools
4. Experimentation
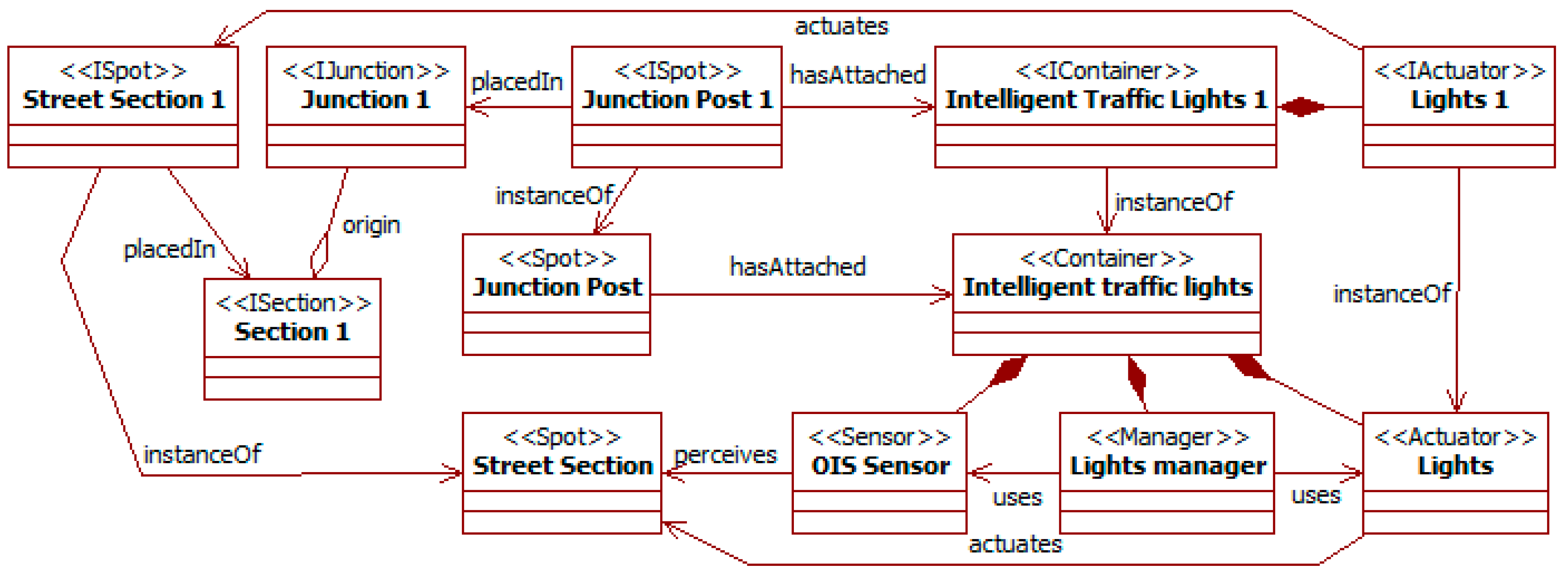
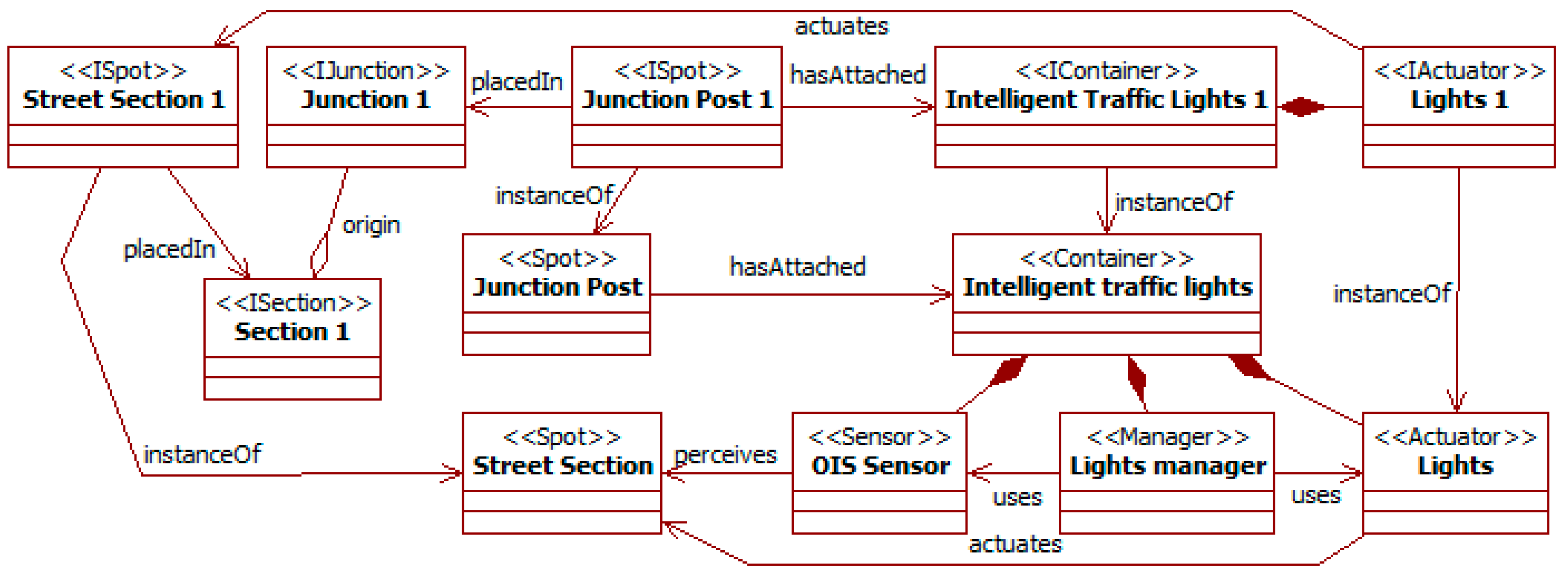
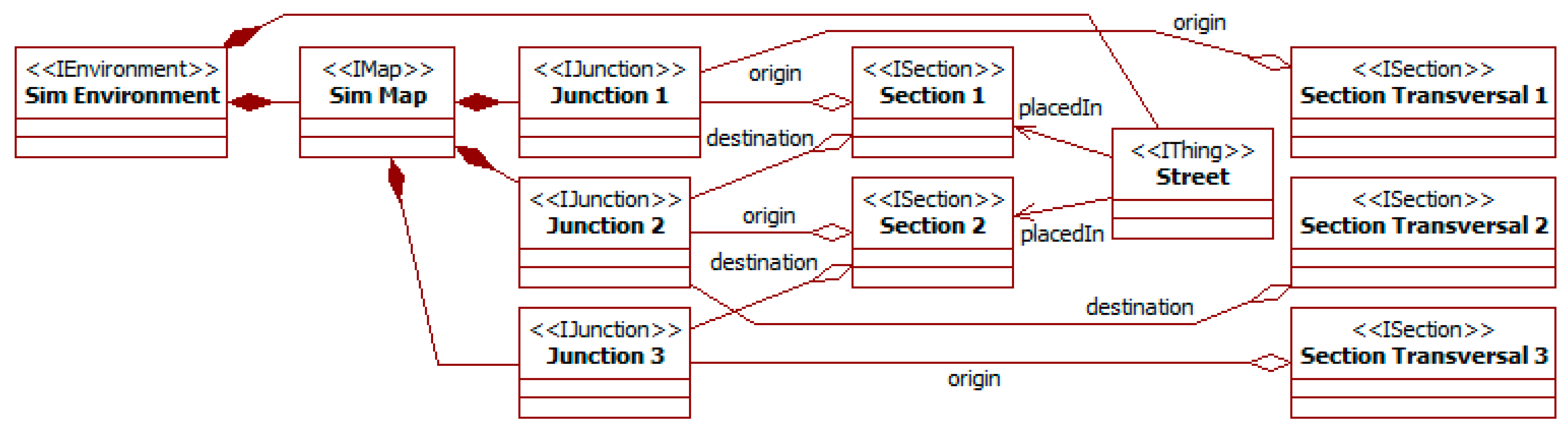
4.1. Case Study: A Control System for Traffic Lights
4.2. Discussion
5. Qualitative Comparative Analysis
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Chourabi, H.; Nam, T.; Walker, S.; Gil-Garcia, J.R.; Mellouli, S.; Nahon, K.; Pardo, T.A.; Scholl, H.J. Understanding Smart Cities: An Integrative Framework. In Proceedings of the 45th Annual Hawaii International Conference on System Sciences (HICSS 2012), Maui, HI, USA, 4–7 January 2012; Sprague, R.H., Jr., Ed.; IEEE: Washington, DC, USA, 2012; pp. 2289–2297. [Google Scholar]
- Harrison, C.; Donnelly, I.A. A Theory of Smart Cities. In Proceedings of the 55th Annual Meeting of the International Society for the Systems Sciences (ISSS 2011), Hull, UK, 17–22 July 2011; pp. 1–15.
- Tewolde, G.S. Sensor and Network Technology for Intelligent Transportation Systems. In 2012 IEEE International Conference on Electro/Information Technology (EIT 2012), Indianapolis, IN, USA, 6–8 May 2012; IEEE: Washington, DC, USA, 2012; pp. 1–7. [Google Scholar]
- The European Parliament and the Council of the European Union. Directive 2010/40/EU of the European Parliament and of the Council of 7 July 2010, on the Framework for the Deployment of Intelligent Transport Systems in the Field of Road Transport and for Interfaces with Other Modes of Transport. Available online: http://eur-lex.europa.eu/ (accessed on 15 March 2015).
- Figueiredo, L.; Jesus, I.; Machado, J.A.T.; Ferreira, J.; de Carvalho, J.L.M. Towards the Development of Intelligent Transportation Systems. In Proceedings of the 2001 IEEE Intelligent Transportation Systems Conference (ITSC 2001), Oakland, CA, USA, 25–29 August 2001; IEEE: Washington, DC, USA, 2001; pp. 1206–1211. [Google Scholar]
- Klein, L.A. Sensor Technologies and Data Requirements for ITS; Artech House Publishers: Norwood, MA, USA, 2001. [Google Scholar]
- Pursula, M. Simulation of Traffic Systems—An Overview. J. Geogr. Inf. Decis. Anal. 1999, 3, 1–8. [Google Scholar]
- Axtell, R.L.; Epstein, J.M. Agent-based modeling: Understanding our creations. Bull. St. Inst. 1994, 9, 28–32. [Google Scholar]
- Bézivin, J. Model Driven Engineering: An Emerging Technical Space. In Generative and Transformational Techniques in Software Engineering; Lecture Notes in Computer Science; Lämmel, R., Saraiva, J., Visser, J., Eds.; Springer: Heidelberg, Germany, 2006; Volume 4143, pp. 36–64. [Google Scholar]
- Fuentes-Fernández, R.; Hassan, S.; Pavón, J.; Galán, J.M.; López-Paredes, A. Metamodels for role-driven agent-based modelling. Comput. Math. Organ. Theory 2012, 18, 91–112. [Google Scholar] [CrossRef]
- Müller, J.P.; Pischel, M.; Thiel, M. Modeling Reactive Behaviour in Vertically Layered Agent Architectures. In Intelligent Agents; Lecture Notes in Computer Science; Wooldridge, M.J., Jennings, N.R., Eds.; Springer: Heidelberg, Germany, 1995; Volume 890, pp. 261–276. [Google Scholar]
- Fernández-Isabel, A.; Fuentes-Fernández, R. A Model-Driven Engineering Process for Agent-Based Traffic Simulations. In Proceedings of the 5th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2015), Colmar, France, 21–23 July 2015; SCITEPRESS: Setúbal, Portugal, 2015; pp. 1–10. [Google Scholar]
- Fuentes-Fernández, R.; Guijarro, M.; Pajares, G. A Multi-Agent System Architecture for Sensor Networks. Sensors 2009, 9, 10244–10269. [Google Scholar] [CrossRef] [PubMed]
- Pavón, J.; Gómez-Sanz, J.J.; Fuentes, R. The INGENIAS Methodology and Tools. In Agent-Oriented Methodologies; Henderson-Sellers, B., Giorgini, P., Eds.; Idea Group Publishing: Hershey, PA, USA, 2005; Chapter IX; pp. 236–276. [Google Scholar]
- Pavón, J.; Gómez-Sanz, J.; Paredes-López, A. The SiCoSSyS approach to SoS engineering. In Proceedings of the 6th International Conference on System of Systems Engineering (SoSE 2011), Albuquerque, NM, USA, 27–30 June 2011; IEEE: Washington, DC, USA, 2011; pp. 179–184. [Google Scholar]
- Krajzewicz, D.; Brockfeld, E.; Mikat, J.; Ringel, J.; Rössel, C.; Tuchscheerer, W.; Wagner, P.; Wösler, R. Simulation of modern Traffic Lights Control Systems using the open source Traffic Simulation SUMO. In Proceedings of the 3rd Industrial Simulation Conference (ISC 2005), Berlin, Germany, 9–11 June 2005; Krueger, J., Lisounkin, A., Schreck, G., Eds.; EUROSIS-ETI: Ostend, Belgium, 2005; pp. 299–302. [Google Scholar]
- Object Management Group. OMG Meta-Object Facility (MOF) Core Specification, Version 2.4.2; Object Management Group, 2014. Available online: http://www.omg.org/ (accessed on 15 March 2015).
- Object Management Group. OMG Unified Modeling Language (OMG UML), Version 2.5; Object Management Group, 2013. Available online: http://www.omg.org/ (accessed on 15 March 2015).
- Steinberg, D.; Budinsky, F.; Paternostro, M.; Merks, E. EMF—Eclipse Modeling Framework, 2nd ed.; Addison-Wesley Professional: Boston, MA, USA, 2008. [Google Scholar]
- Lopes, D.; Hammoudi, S.; Bézivin, J.; Jouault, F. Mapping Specification in MDA: From Theory to Practice. In Interoperability of Enterprise Software and Applications; Konstantas, D., Bourrières, J.-P., Léonard, M., Boudjlida, N., Eds.; Springer: Heidelberg, Germany, 2006; pp. 253–264. [Google Scholar]
- Kelly, S.; Lyytinen, K.; Rossi, M. Metaedit+: A fully configurable multi-user and multi-tool CASE and CAME environment. In Advanced Information Systems Engineering; Lecture Notes in Computer Science; Constantopoulos, P., Mylopoulos, J., Vassiliou, Y., Eds.; Springer: Heidelberg, Germany, 1996; Volume 1080, pp. 1–21. [Google Scholar]
- Mens, T.; van Gorp, P. A Taxonomy of Model Transformation. Electron. Notes Theor. Comput. Sci. 2006, 152, 125–142. [Google Scholar] [CrossRef]
- Czarnecki, K.; Helsen, S. Feature-Based survey of model transformation approaches. IBM Syst. J. 2006, 45, 621–645. [Google Scholar] [CrossRef]
- Eclipse M2T. Eclipse Modeling-M2T-Home. Available online: https://www.eclipse.org/modeling/m2t/ (accessed on 15 March 2015).
- Eclipse MMT. Eclipse Model to Model Transformation. Available online: https://www.eclipse.org/mmt/ (accessed on 15 March 2015).
- Kleppe, A.G.; Warmer, J.; Bast, B. MDA Explained: The Model Driven Architecture—Practice and Promise; Addison-Wesley: Boston, MA, USA, 2003. [Google Scholar]
- Gómez-Rodríguez, A.; Fuentes-Fernández, R.; González-Moreno, J.C.; Rodríguez-Martínez, F.J. INGENIAS with the Unified Development Process. In Handbook on Agent-Oriented Design Processes; Cossentino, M., Hilaire, V., Molesini, A., Seidita, V., Eds.; Springer: Heidelberg, Germany, 2014; pp. 371–405. [Google Scholar]
- González-Moreno, J.C.; Gómez-Rodríguez, A.; Fuentes-Fernández, R.; Ramos-Valcárcel, D. INGENIAS-Scrum. In Handbook on Agent-Oriented Design Processes; Cossentino, M., Hilaire, V., Molesini, A., Seidita, V., Eds.; Springer: Heidelberg, Germany, 2014; pp. 219–251. [Google Scholar]
- García-Magariño, I.; Fuentes-Fernández, R. A Technique for Defining Metamodel Translations. IEICE Trans. Inf. Syst. 2009, 92, 2043–2052. [Google Scholar] [CrossRef]
- Amditis, A.; Pagle, K.; Joshi, S.; Bekiaris, E. Driver-Vehicle-Environment monitoring for on-board driver support systems: Lessons learned from design and implementation. Appl. Ergon. 2010, 41, 225–235. [Google Scholar] [CrossRef] [PubMed]
- Rubel, D.; Wren, J.; Clayberg, E. The Eclipse Graphical Editing Framework (GEF); Addison-Wesley Professional: Boston, MA, USA, 2011. [Google Scholar]
- Ehlert, P.A.M.; Rothkrantz, L.J.M. Microscopic traffic simulation with reactive driving agents. In Proceedings of the 2001 IEEE Intelligent Transportation Systems Conference (ITSC 2001), Oakland, CA, USA, 25–29 August 2001; IEEE: Washington, DC, USA, 2001; pp. 860–865. [Google Scholar]
- Karpiriski, M.; Senart, A.; Cahill, V. Sensor networks for smart roads. In Proceedings of the 4th Annual IEEE International Conference on Pervasive Computing and Communications, Workshops (PerComW 2006), Pissa, Italy, 13–17 March 2006; IEEE: Washington, DC, USA, 2006; p. 310. [Google Scholar]
- Transport Systems Planning and Transport Telematics Group (Technische Universität Berlin); Transport Planning Group (Swiss Federal Institute of Technology Zurich); Senozon Company. MATSim, Multi-Agent Transport Simulation; MATSim, 2015. Available online: http://www.matsim.org/ (accessed on 25 May 2015).
- Fernández-Isabel, A.; Fuentes-Fernández, R. An Agent-Based Platform for Traffic Simulation. In Soft Computing Models in Industrial and Environmental Applications, 6th International Conference SOCO 2011; Advances in Intelligent and Soft Computing. Corchado, E., Snášel, V., Sedano, J., Hassanien, A.E., Calvo, J.L., Ślȩzak, D., Eds.; Springer: Heidelberg, Germany, 2011; Volume 87, pp. 505–514. [Google Scholar]
- Pascale, A.; Nicoli, M.; Deflorio, F.; Dalla Chiara, B.; Spagnolini, U. Wireless sensor networks for traffic management and road safety. IET Intell. Transp. Syst. 2012, 6, 67–77. [Google Scholar] [CrossRef]
- Sun, Z.; Bebis, G.; Miller, R. On-Road vehicle detection: A review. IEEE Trans. Pattern Anal. Mach. Intell. 2006, 28, 694–711. [Google Scholar] [PubMed]
- Faouzi, N.-E.E.; Leung, H.; Kurian, A. Data fusion in intelligent transportation systems: Progress and challenges—A survey. Inf. Fusion 2011, 12, 4–10. [Google Scholar] [CrossRef]
- Gandhi, T.; Trivedi, M.M. Pedestrian protection systems: Issues, survey, and challenges. IEEE Trans. Intell. Transp. Syst. 2007, 8, 413–430. [Google Scholar] [CrossRef]
- Hancke, G.P.; de Carvalho e Silva, B.; Hancke, G.P., Jr. The Role of Advanced Sensing in Smart Cities. Sensors 2012, 13, 393–425. [Google Scholar] [CrossRef] [PubMed]
- Trivedi, M.M.; Gandhi, T.; McCall, J. Looking-In and looking-out of a vehicle: Computer-Vision-Based enhanced vehicle safety. IEEE Trans. Intell. Transp. Syst. 2007, 8, 108–120. [Google Scholar] [CrossRef]
- Kotusevski, G.; Hawick, K.A. A Review of Traffic Simulation Software. Res. Lett. Inf. Math. Sci. 2009, 13, 35–54. [Google Scholar]
- Picone, M.; Amoretti, M.; Zanichelli, F. Simulating Smart Cities with DEUS. In Proceedings of the 5th International ICST Conference on Simulation Tools and Techniques (SIMUTOOLS 2012), Desenzano, Italy, 19–23 March 2012; pp. 172–177.
- Prendinger, H.; Gajananan, K.; Zaky, A.; Fares, A.; Molenaar, R.; Urbano, D.; van Lint, H.; Gomaa, W. Tokyo Virtual Living Lab: Designing Smart Cities Based on the 3D Internet. IEEE Internet Comput. 2013, 17, 30–38. [Google Scholar] [CrossRef]
- Salvucci, D.D.; Boer, E.R.; Liu, A. Toward an Integrated Model of Driver Behavior in Cognitive Architecture. Transp. Res. Rec. J. Transp. Res. Board 2001, 1779, 9–16. [Google Scholar] [CrossRef]
- Object Management Group. Object Constraint Language, Version 2.4; Object Management Group, 2014. Available online: http://www.omg.org/ (accessed on 15 March 2015).
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fernández-Isabel, A.; Fuentes-Fernández, R. Analysis of Intelligent Transportation Systems Using Model-Driven Simulations. Sensors 2015, 15, 14116-14141. https://doi.org/10.3390/s150614116
Fernández-Isabel A, Fuentes-Fernández R. Analysis of Intelligent Transportation Systems Using Model-Driven Simulations. Sensors. 2015; 15(6):14116-14141. https://doi.org/10.3390/s150614116
Chicago/Turabian StyleFernández-Isabel, Alberto, and Rubén Fuentes-Fernández. 2015. "Analysis of Intelligent Transportation Systems Using Model-Driven Simulations" Sensors 15, no. 6: 14116-14141. https://doi.org/10.3390/s150614116