1. Introduction
The active sonar system [
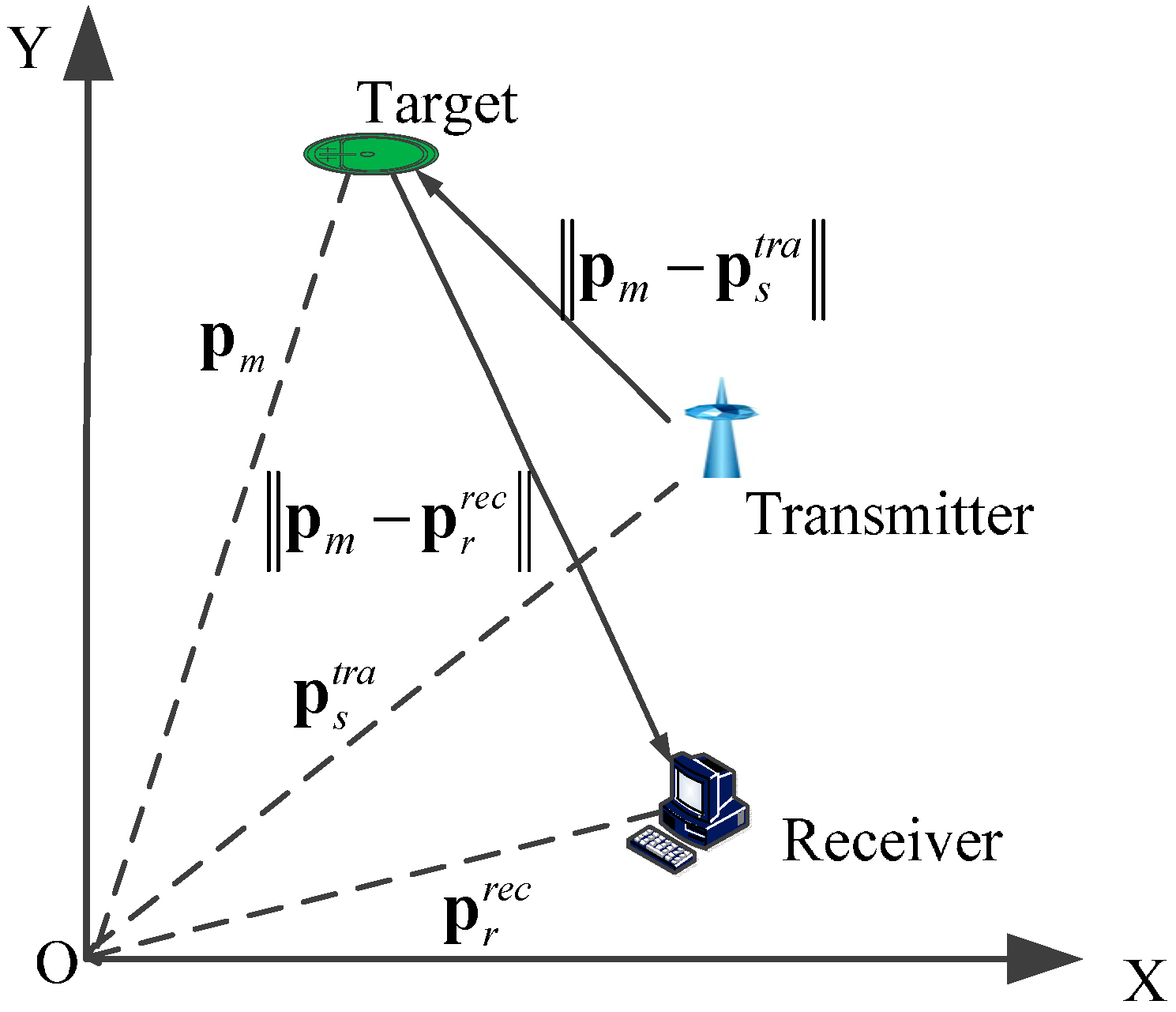
1] is one of the most used sonar systems; it uses one or more transmitters and receivers. Transmitters emit acoustic signals, and receivers listen to echoes of this signal from a target. When the transmitter and receiver are co-located, it is described as monostatic; when the transmitter and receiver are not co-located, it is described as bistatic; when multiple transmitters or receivers are used and spatially separated, it is described as multistatic. Multistatic target tracking has attracted broad attention since the formation of the NATO Multistatic Tracking Working Group in 2005. The multistatic sonar system provides the following measurements: bistatic range,
i.e., time-of-arrival, bearing measurements, bistatic range-rate measurements if continuous waveform (CW) is used and signal-to-noise ratio (SNR). Different waveforms can yield different measurement types and uncertainties. For example, frequency-modulated (FM) signals provide more accurate range measurements, while CW signals deliver Doppler measurements in addition to lower resolution range measurements. Both the FM and CW signals deliver bearing measurements. Additionally, FM and CW signals can be transmitted simultaneously. In this paper, we consider only bistatic range and Doppler information.
The major advantage of the multistatic sonar system is that it has additional detection opportunities in comparison to a monostatic system. It is very hard for a target to remain covert in a multistatic sonar system due to the transmitter-target-receiver geometry. In addition, the multistatic sonar system also has the potential to reduce the overall measurement uncertainty. What is more, receivers can remain covert if they are spatially separated from the transmitter.
Despite the advantages of multistatic sonar tracking systems, their use is challenging because of the complexity of the underwater environment. The underwater environment is time varying and spare varying, characterized by low target detection probability and an extremely large number of false alarms caused by reverberation [
2,
3]. Meanwhile, the low speed of acoustic propagation might result in measurement time delay, which will increase uncertainty in target location.
The multistatic system requires some form of data association approach to associate estimates. Some of the common data association approaches used for multi-target tracking are: (1) nearest neighbor (NN)-based trackers [
4]; (2) multiple hypothesis trackers (MHT) [
5] and their variants, such as distributed MHT [
6] and probabilistic MHT (PMHT) [
7]; (3) a joint probabilistic data association filter (JPDA) [
8]; (4) batch processing approaches, such as maximum likelihood probabilistic data association (MLPDA) [
9,
10] and maximum likelihood probabilistic multi-hypothesis trackers (ML-PMHT) [
11,
12,
13]; (5) a probability hypothesis density (PHD) tracker [
14] and its variants, such as Gaussian mixture cardinalized PHD (GMCPHD) [
3,
15,
16]; (6) particle filtering (PF) and some of its variants [
17,
18]; and (7) a specular-cued tracker [
19].
The PMHT is a natural and effective data association approach. The key idea is that it allows multiple measurements to be assigned to the same target/transmitter, which differs from the traditional data association approaches, such as JPDA [
8]. Moreover, the computational burden of PMHT grows linearly with the number of targets detected. Furthermore, it works directly in the original Cartesian space, which reduces the amount of tuning. However, the “usual” PMHT algorithm just considers the data association ambiguity between measurements and targets [
20,
21,
22]. For multistatic sonar target tracking, there is an additional unknown data association between measurements and transmitters,
i.e., we do not know which measurement arises from which transmitter, which increases data association complexity.
In this paper, we propose a novel PMHT tracker based on the extended Kalman filter (EKF) and unscented Kalman filter (UKF) for the problem of multi-target multi-sensor sonar tracking in a cluttered environment. In contrast to the “usual” PMHT, the proposed PMHT algorithm can handle both the measurement-to-target and measurement-to-transmitter association. In addition, we present a more compact formulation for the EKF-based PMHT, which obviates the need to form “stacked” measurements.
The remainder of this paper is as follows.
Section 2 describes the system and measurement model for multi-target multi-sensor sonar tracking. The PMHT algorithm is provided in
Section 3.
Section 4 discusses the simulation results. Finally,
Section 5 summarizes the paper and describes further work.
3. The PMHT Approach with Unknown Transmitter Association
In this section, we derive the PMHT method for multi-target multi-sensor sonar tracking with unknown measurement-to-target and measurement-to-transmitter association. We assume all measurements’ qualities for a particular transmitter are different and use the sequential updating for the UKF smoother.
3.1. Notation
Let there be targets and measurements for a receiver at time . The measurements consist of the detected target returns and clutter measurements. As a result, the collections of states for all targets and available measurements at time are written as and . The collection of states and measurements for all targets up to time are and . Now, our goal is to estimate the target states .
In the “usual” PMHT, we write
if measurement
is associated with a target
. Similarly, here, we define
if measurement
is associated with transmitter
. Then, the prior probabilities’ associations are denoted as:
The statistically-independent measurement-to-target and measurement-to-transmitter associations at time are and , respectively. The associations for the entire batch up to time are and .
3.2. The PMHTu Algorithm
PMHT is an expectation maximization (EM)-based [
28], batch-tracking algorithm for multi-target tracking in a cluttered environment. The aim of the PMHT approach is to maximize
over
using the EM algorithm. That is, we should find the maximum
a posteriori (MAP) estimate of
Usually, it is difficult to directly evaluate the MAP expectation. Hence, we define the following function:
where
is the number of the EM iterative steps. Based on an initial estimate
, the PMHT aims to find:
until a desired degree of convergence is achieved.
In order to derive an analytic expression for
, we note that the posterior association probabilities for all measurements in Equation (7) can be written as:
where:
The derivation of
is given in
Appendix A. Here,
denotes the posterior association probability of measurement
being related to target
and transmitter
at time
.
is the spatial density of clutter, and
is the measurements’ region of volume. Assume the clutters are uniformly distributed in range and Doppler measurement space. Additionally, the number of clutter
follows the Poisson distribution:
Now, we obtain (the detailed derivation is given in
Appendix B):
In order to maximize
in Equation (12), we should find its gradient. It turns out that Equation (12) has the same derivative as:
where the synthetic measurement
and covariance
are given by:
There is no association uncertainty for maximizing the , so that we can employ the UKF smoother to solve the maximization problem. Here, Equation (13) reflects the nonlinearity of the measurement model in Equation (4).
There are two methods to update the Kalman filter for a multi-sensor scenario: sequential updating and parallel updating [
29]. In sequential updating, the state vector and state covariance matrix are updated sequentially. The sequential updating can be easily extended to a larger number of sensors. In the parallel updating, we stack the measurements and update them in one step. Data from all sensors are expected; also, it is not easy to extend the number of sensors. An additional disadvantage of the parallel updating is that it needs to operate large measurement vectors and matrices, which is more computationally expensive. In this paper, we use the sequential updating method.
3.3. PMHTe Simplification for the Multi-Sensor Case
In this section, we present a compact formulation that obviates the need to form the “stacked” measurements for the PMHTe.
For the EKF, the derivatives of the range and Doppler observed by a transmitter
with respect to the target
are given by:
in which
and
.
The derivatives of the range and Doppler for
is similar to
. Therefore, the gradient of the nonlinear measurement function
becomes:
Considering the nonlinear system model in Equation (4) and performing a linearization at
, we get:
Rearranging and factorizing Equation (18) yields:
Finally, it turns out that Equation (12) has the same derivative with
, where:
in which the synthetic measurement
and synthetic measurement covariance
are given by:
Maximizing the thus coincides with the maximum of a single sensor system with no association uncertainty, so that we can easily use the EKF smoother to update the target state by the synthetic measurement and covariance .
4. Simulation
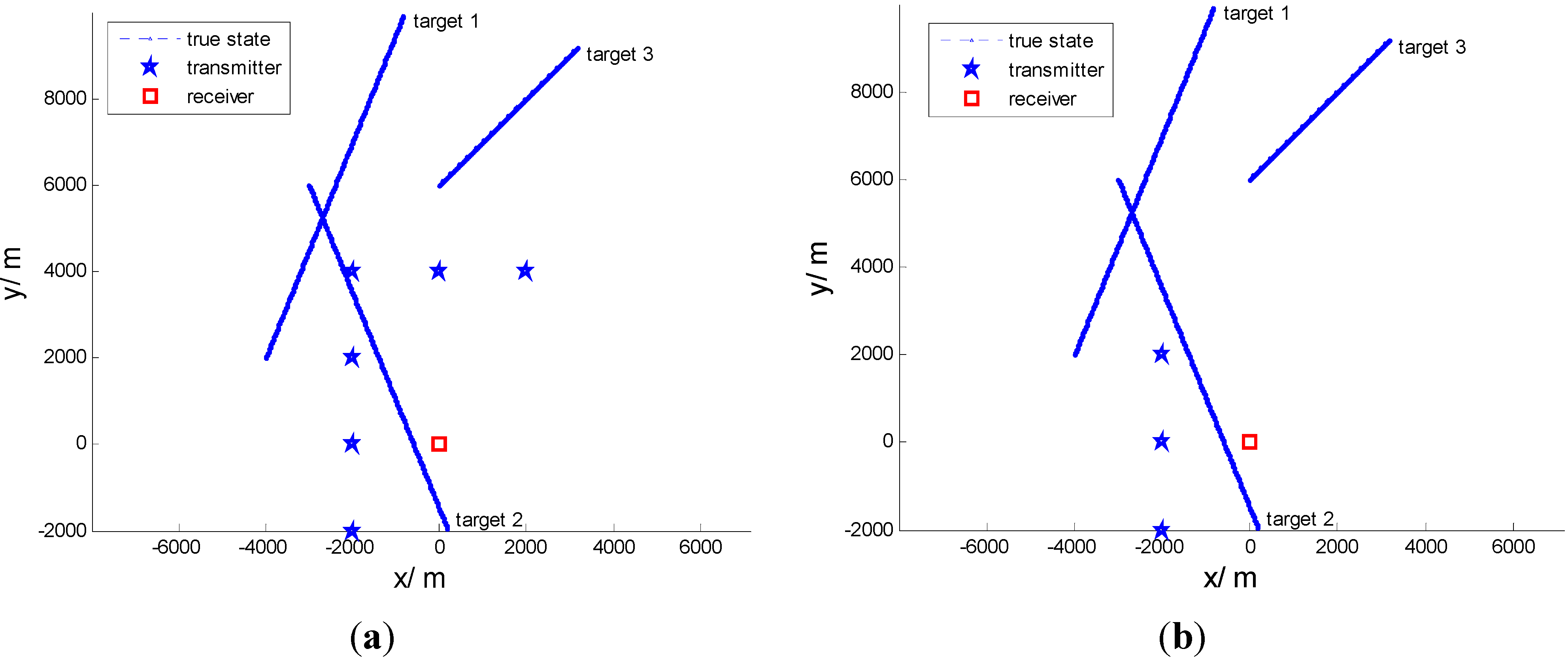
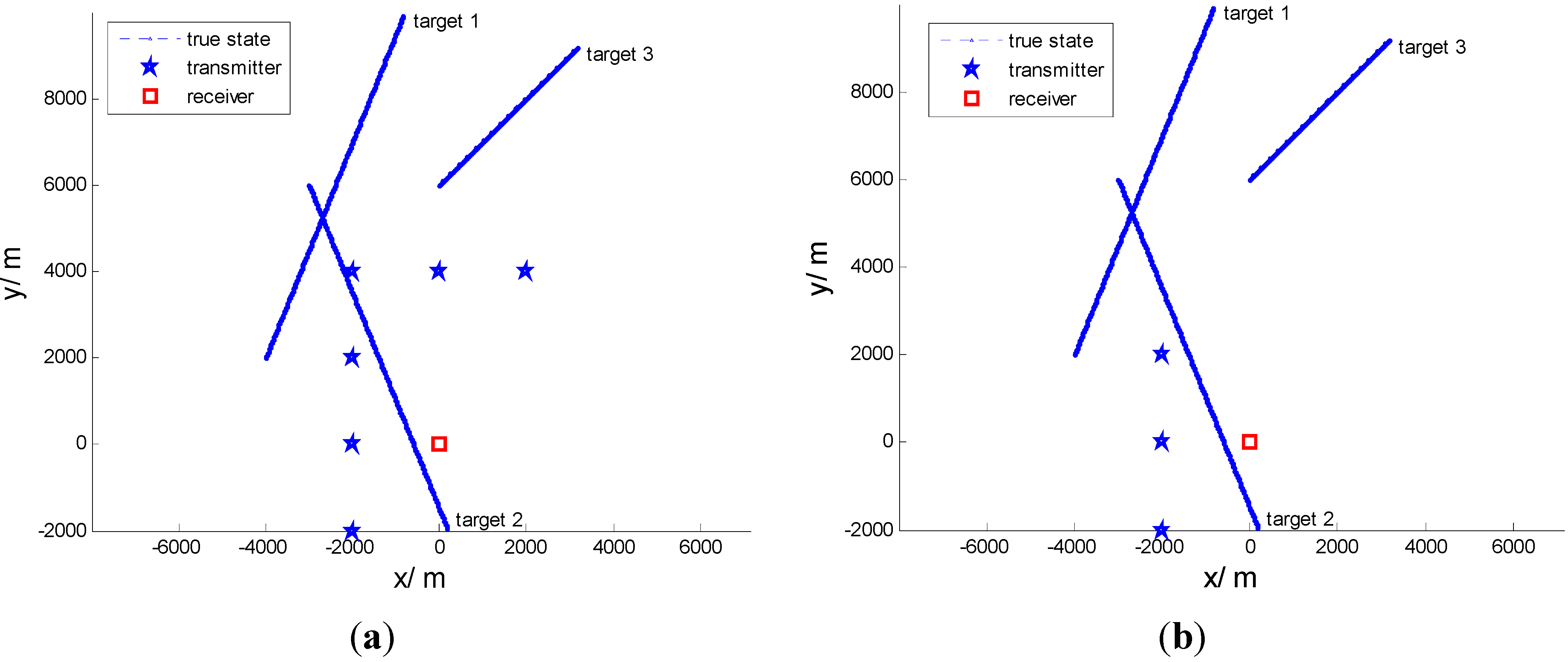
The simulation consists of two scenarios. The first scenario consists of six transmitters and a single receiver. The second scenario consists of three transmitters and a single receiver. The transmitters and receiver are both stationary. Both scenarios treat the same three targets as seen in
Figure 2. The targets’ parameters are shown in
Table 1. The receiver is located at the origin of the ordinates. The six transmitters are placed at: (i) [−2000 m, −2000 m]; (ii) [−2000 m, 0 m]; (iii) [−2000 m, 2000 m]; (iv) [−2000 m, 4000 m]; (v) [0 m, 4000 m]; and (vi) [2000 m, 4000 m]. The frequency of the transmitters is 20 kHz. We assume the probability of detection is equal and constant for all targets; here, we set it to 0.5. The number of clutters is Poisson distributed with mean 60 per scan. The entire tracking time is 200 scans with a scan period of
s, and 100 Monte Carlo runs were performed. The simulations were carried out in MATLAB 2009b on a PC with an Intel(R) Pentium 3.00 GHz CPU and 4 GB RAM.
Figure 2.
Three target tracks for 200 scans for one receiver: (a) Six transmitters; (b) Three transmitters.
Figure 2.
Three target tracks for 200 scans for one receiver: (a) Six transmitters; (b) Three transmitters.
Table 1.
The three targets’ parameters.
Table 1.
The three targets’ parameters.
| Target | Target Initial Position (m) | Target Velocity (m/s) |
|---|
| 1 | (−4000, 2000) | (2, 5) |
| 2 | (−3000, 6000) | (2, −5) |
| 3 | (0, 6000) | (2, 2) |
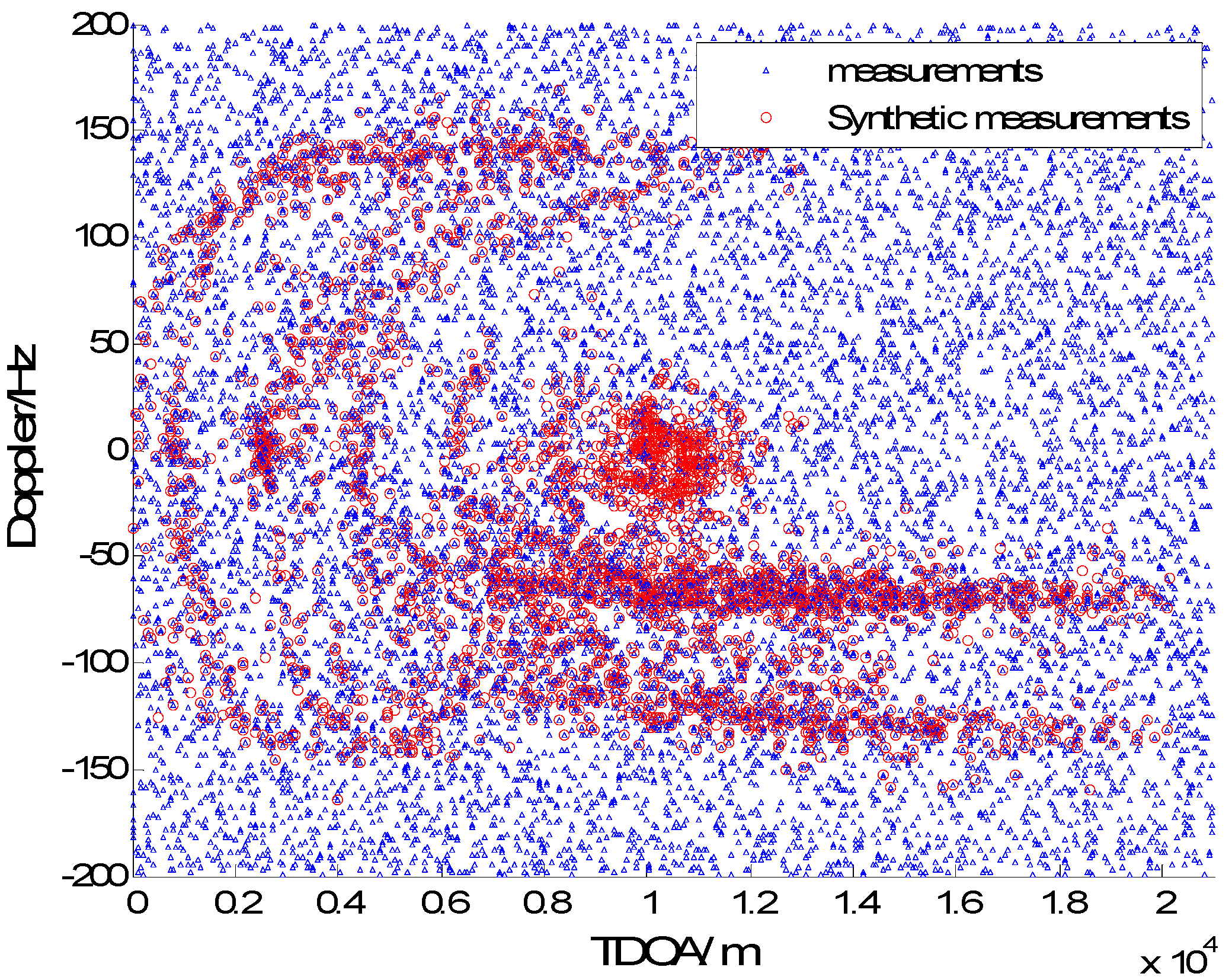
In
Figure 3,
Figure 4,
Figure 5 and
Figure 6 we consider the range and Doppler measurements for all targets with and without clutter. Measurements are presented with a blue “triangle”, and synthetic measurements are illustrated with a red “circle”. In
Figure 3 and
Figure 4, we consider the measurements for three targets with six transmitters on the conditions of without clutter and with clutter. The process noise intensity is
m, and the measurement noise for range and Doppler are
m and
Hz. As seen in
Figure 4, the clutter is dense, and the synthetic measurements for PMHTe are broadly consistent with the measurements without clutter in
Figure 3, which means that the PMHT approach can suppress clutter efficiently. The measurements for three transmitters in the same condition are similar to the case of six transmitters, as seen in
Figure 5 and
Figure 6.
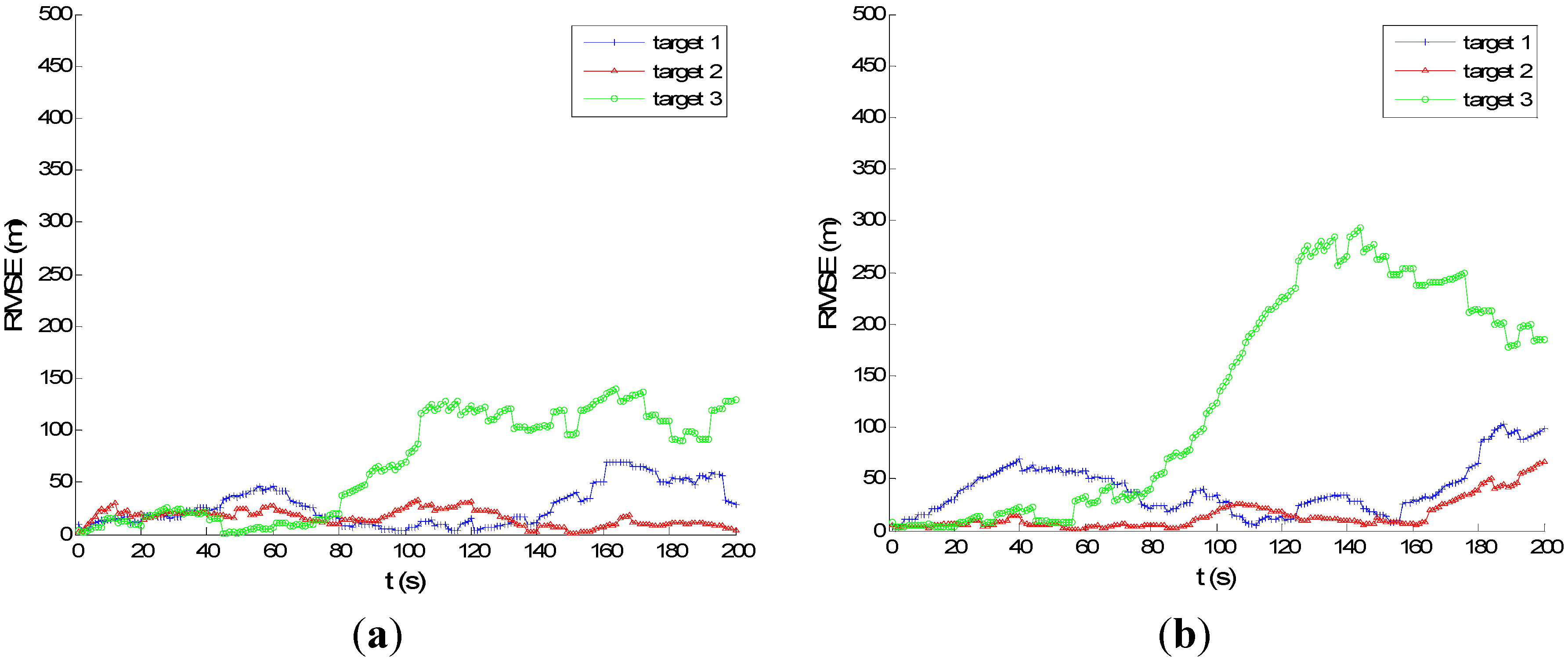
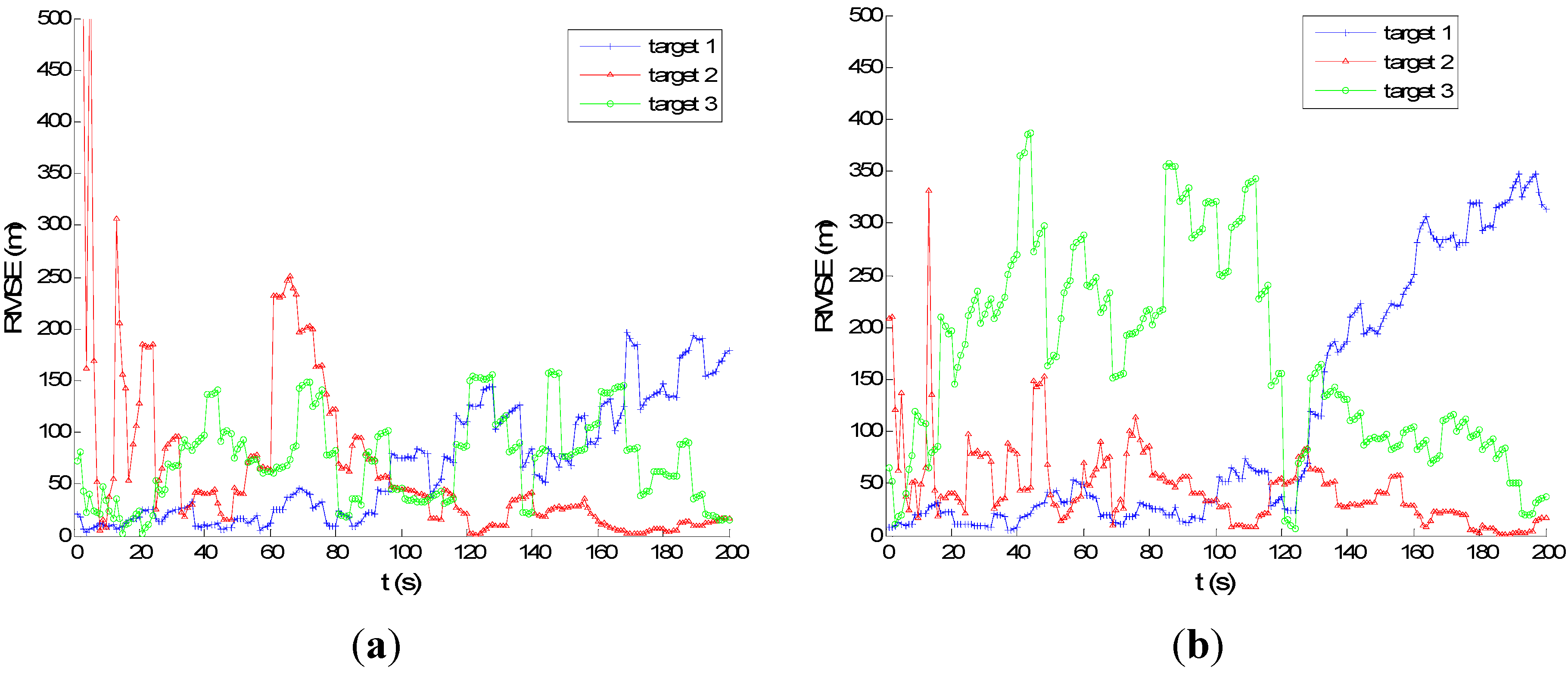
Figure 7 and
Figure 8 show the performance of PMHTe and PMHTu in the sense of root mean square error (RMSE) of position
versus time scans with a high measurement noise lever for the case of six transmitters and three transmitters, respectively. The measurement noise variances are
m for range and
Hz for Doppler. We can see that for the condition of six transmitters, the PMHTu approach can track all three targets efficiently, and the PMHTe approach works a little worse for Target 3, which is far from the transmitters and receiver. For the condition of three transmitters, the RMSE of position for the PMHTu approach is small for all three targets; while a little worse than the case of six transmitters; the PMHTe method works worse for Targets 1 and 3, as we can see the position errors increase as time elapses. This is because the EKF simply approximates the system function and the measurement function with a first-order Taylor series evaluated at the current estimate of the target state. The EKF ignores higher-order terms and can diverge if it is used in a highly nonlinear system. As opposed to the EKF, the UKF does not approximate the nonlinear measurement function. Instead, it captures the mean and covariance of the target state using deterministic sigma-points based on the unscented transform. The UKF can capture more aspects of the higher order terms, with no Jacobians needed. If the system is highly nonlinear, the EKF may diverge, and the UKF produces typically better results.
Figure 3.
Measurements for three targets without clutter, m, m, Hz, , six transmitters.
Figure 3.
Measurements for three targets without clutter, m, m, Hz, , six transmitters.
Figure 4.
EKF probabilistic multi-hypothesis tracker (PMHTe) synthetic measurements with clutter, m, m, Hz, , six transmitters.
Figure 4.
EKF probabilistic multi-hypothesis tracker (PMHTe) synthetic measurements with clutter, m, m, Hz, , six transmitters.
Figure 5.
Measurements for three targets without clutter, m, m, Hz, , three transmitters.
Figure 5.
Measurements for three targets without clutter, m, m, Hz, , three transmitters.
Figure 6.
PMHTe synthetic measurements with clutter, m, m, Hz, , three transmitters.
Figure 6.
PMHTe synthetic measurements with clutter, m, m, Hz, , three transmitters.
Figure 7.
RMSE of position for high measurement noise, m, m, Hz, , six transmitters: (a) UKF PMHT (PMHTu); (b) PMHTe.
Figure 7.
RMSE of position for high measurement noise, m, m, Hz, , six transmitters: (a) UKF PMHT (PMHTu); (b) PMHTe.
Figure 8.
RMSE of position for high measurement noise, m, m, Hz, , three transmitters: (a) PMHTu; (b) PMHTe.
Figure 8.
RMSE of position for high measurement noise, m, m, Hz, , three transmitters: (a) PMHTu; (b) PMHTe.
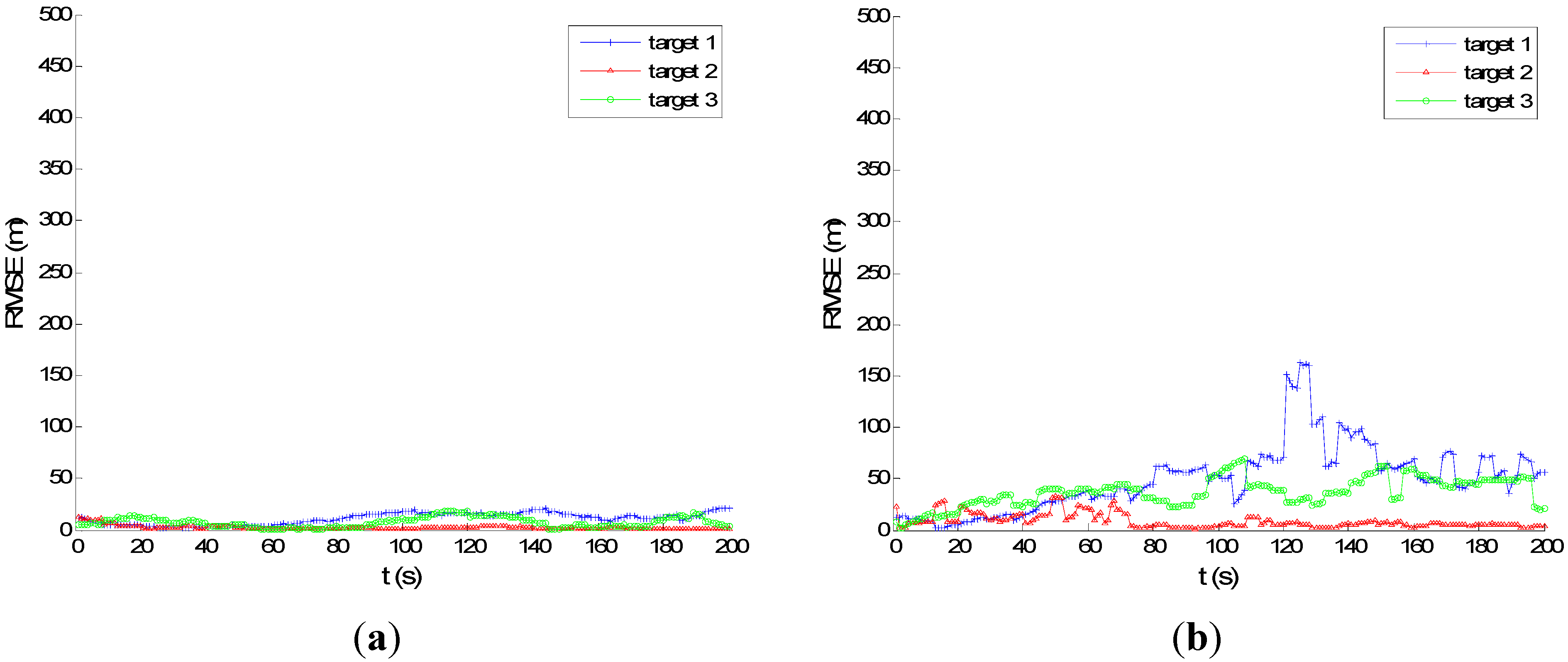
Now, we consider a less challenging situation for the case of six transmitters, as seen in
Figure 9: the process noise intensity is
m, and the measurement noise variances are
m for range and
Hz for Doppler. We can see that the position errors for all the three targets are small for both the PMHTe and PMHTu approach. It would appear that the PMHT approach can work adequately in less challenging situations.
Figure 9.
RMSE of position for less challenging situation, m, m, Hz, , , six transmitters: (a) PMHTu; (b) PMHTe.
Figure 9.
RMSE of position for less challenging situation, m, m, Hz, , , six transmitters: (a) PMHTu; (b) PMHTe.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}