
Underwater Acoustic Matched Field Imaging Based on Compressed Sensing


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (1)
- The model of CS-MFP is established from wave propagation angle considering boundaries;
- (2)
- The recovery performance of the model is discussed from a CS angle by examining the lower bound of the CS coherent parameter of the above model;
- (3)
- The effective solution is given when targets are sparsely distributed.
2. Compressed Sensing MFP Model Formulation
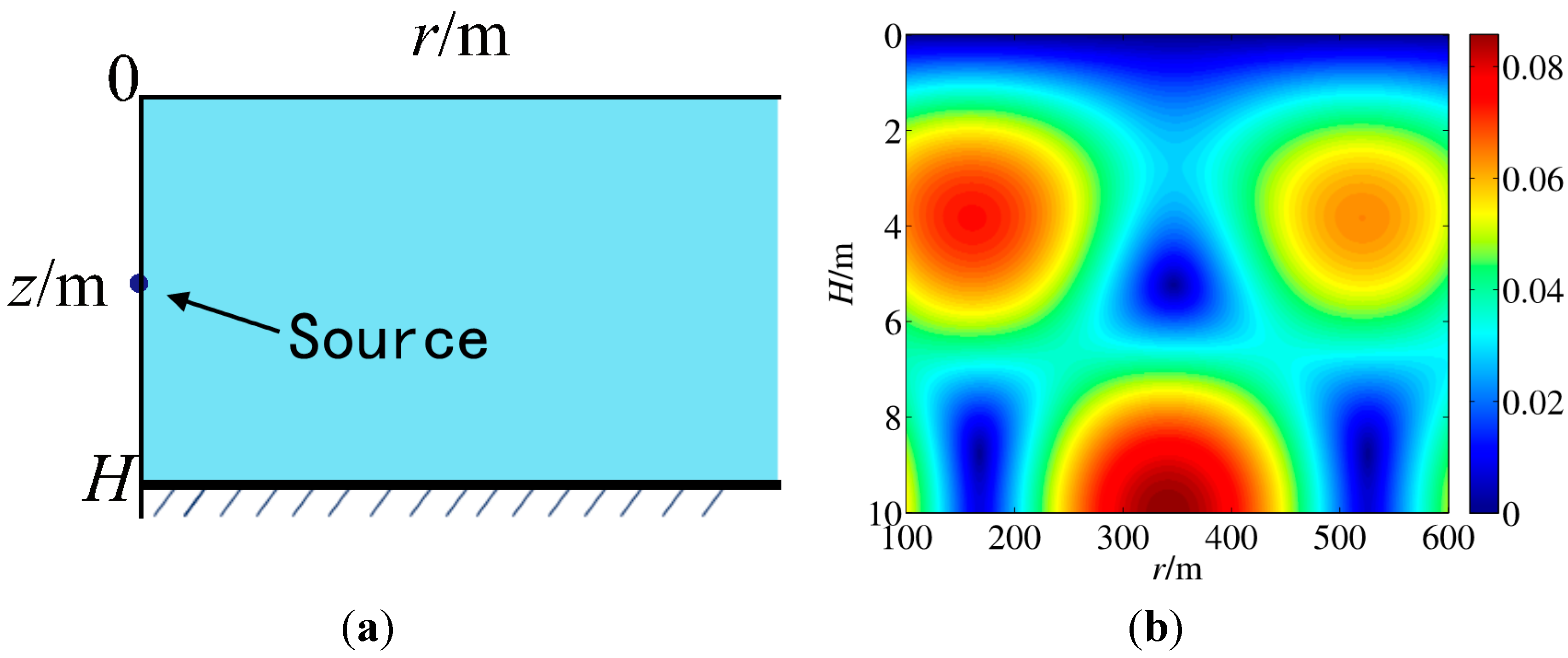
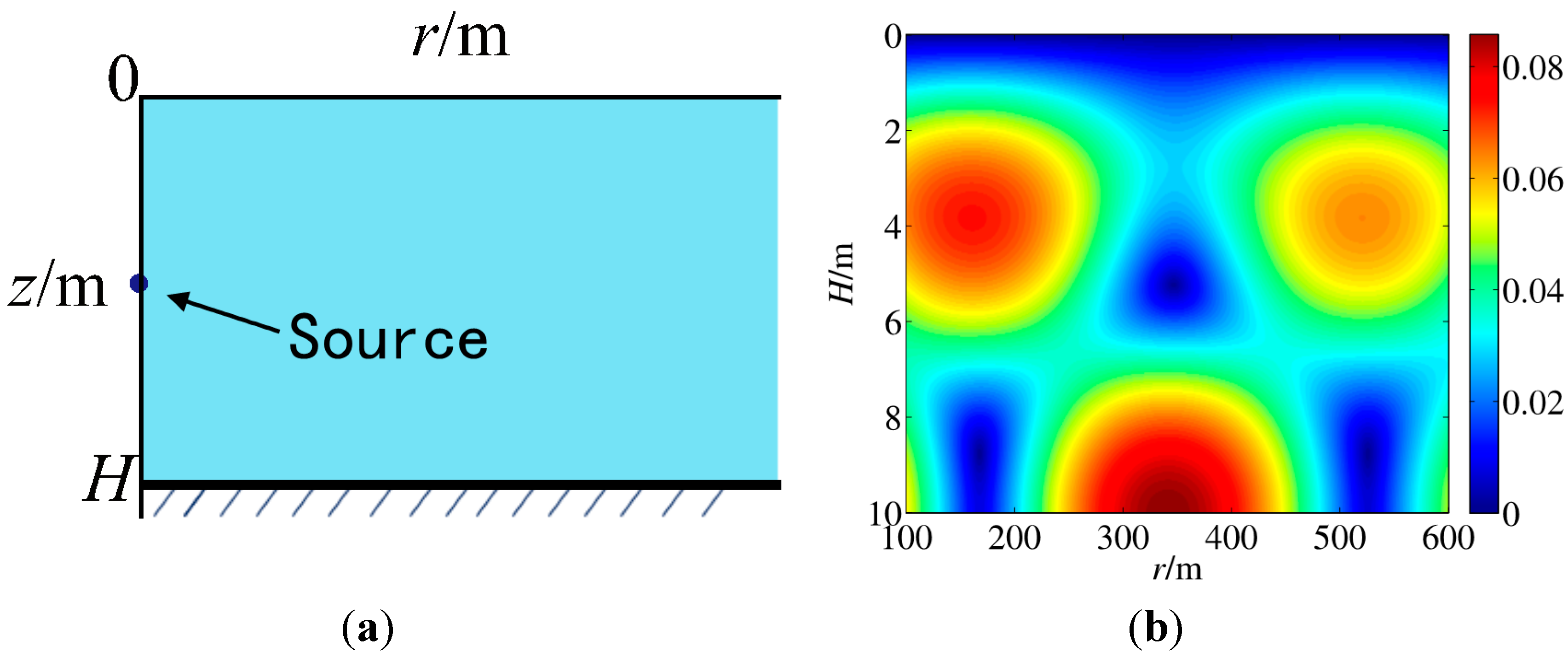
2.1. Wave Propagation Theories
2.2. CS-MFP Model Formulation
- (1)
- the distance has no impact on the coherence parameter.
- (2)
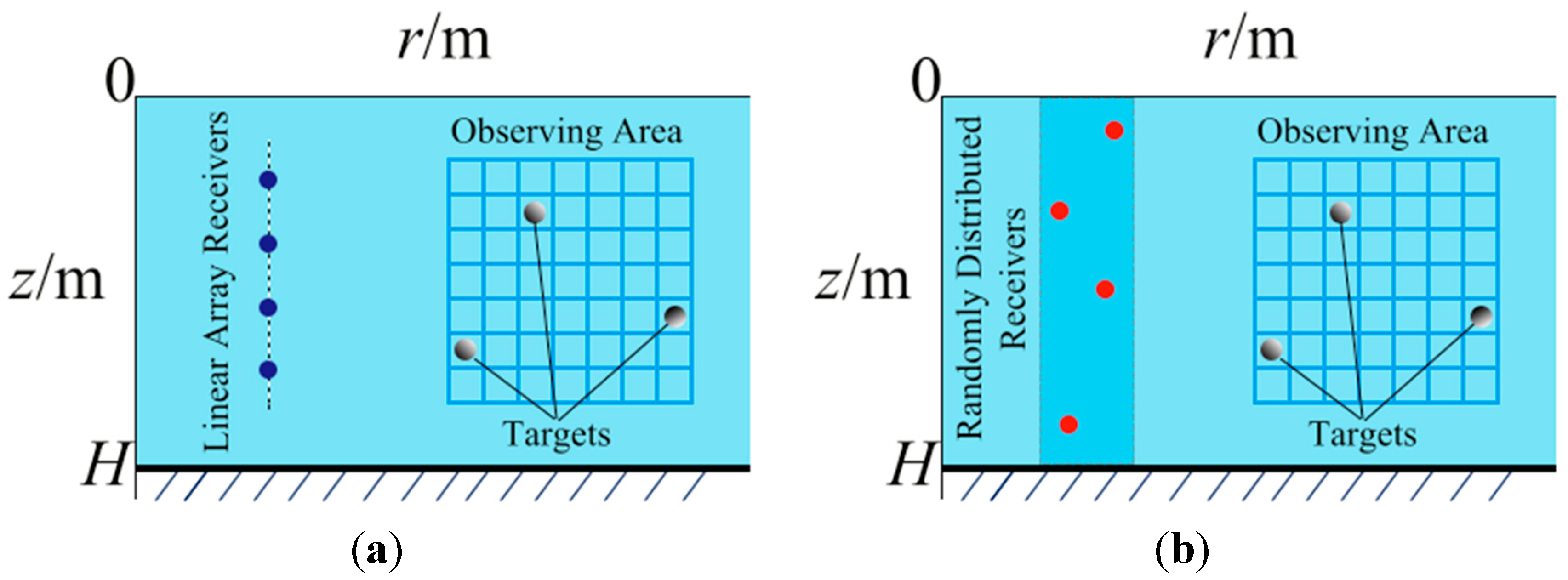
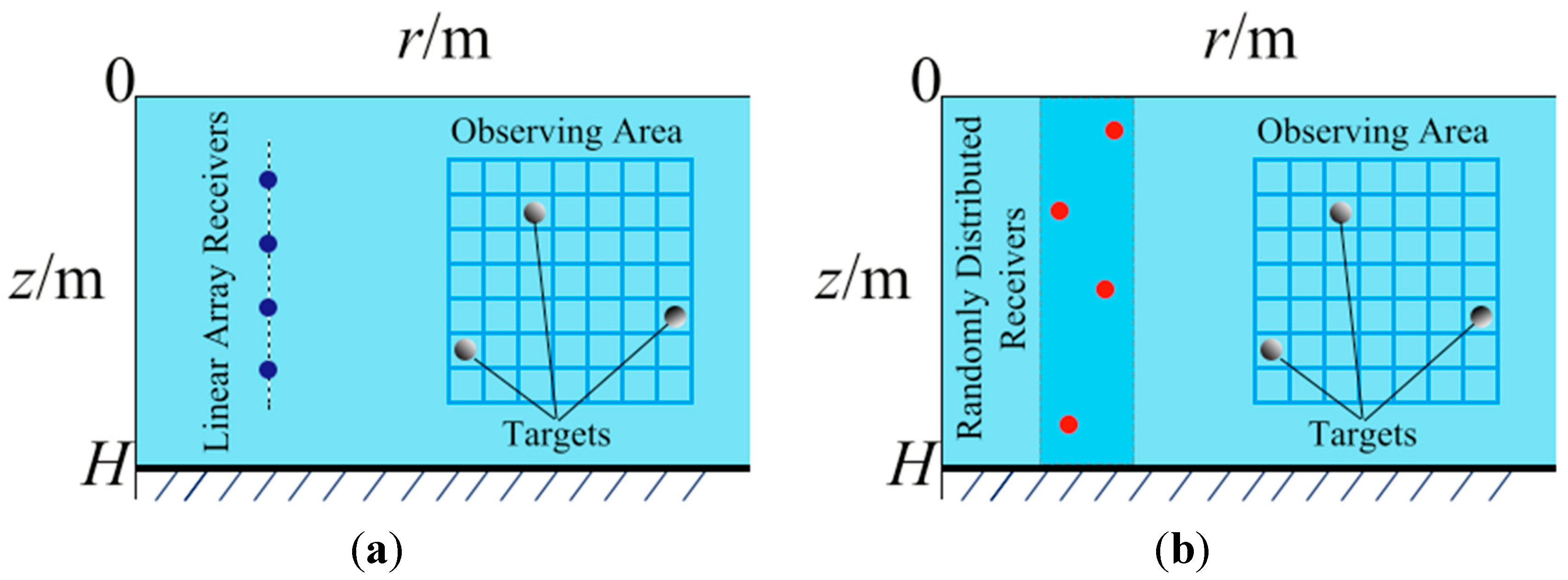
- the random deployment of sensors helps lower the coherence parameter in Equations (12) and (15), according to Cauchy-Schwarz inequality. Traditionally, if we use uniform array, we will have in Equation (12) and greater as
- (3)
- in the special case, the high coherent part is mainly contributed by signals of the same modes.
- (4)
- if all the () are compensated to have equal energy, we have a lower bound
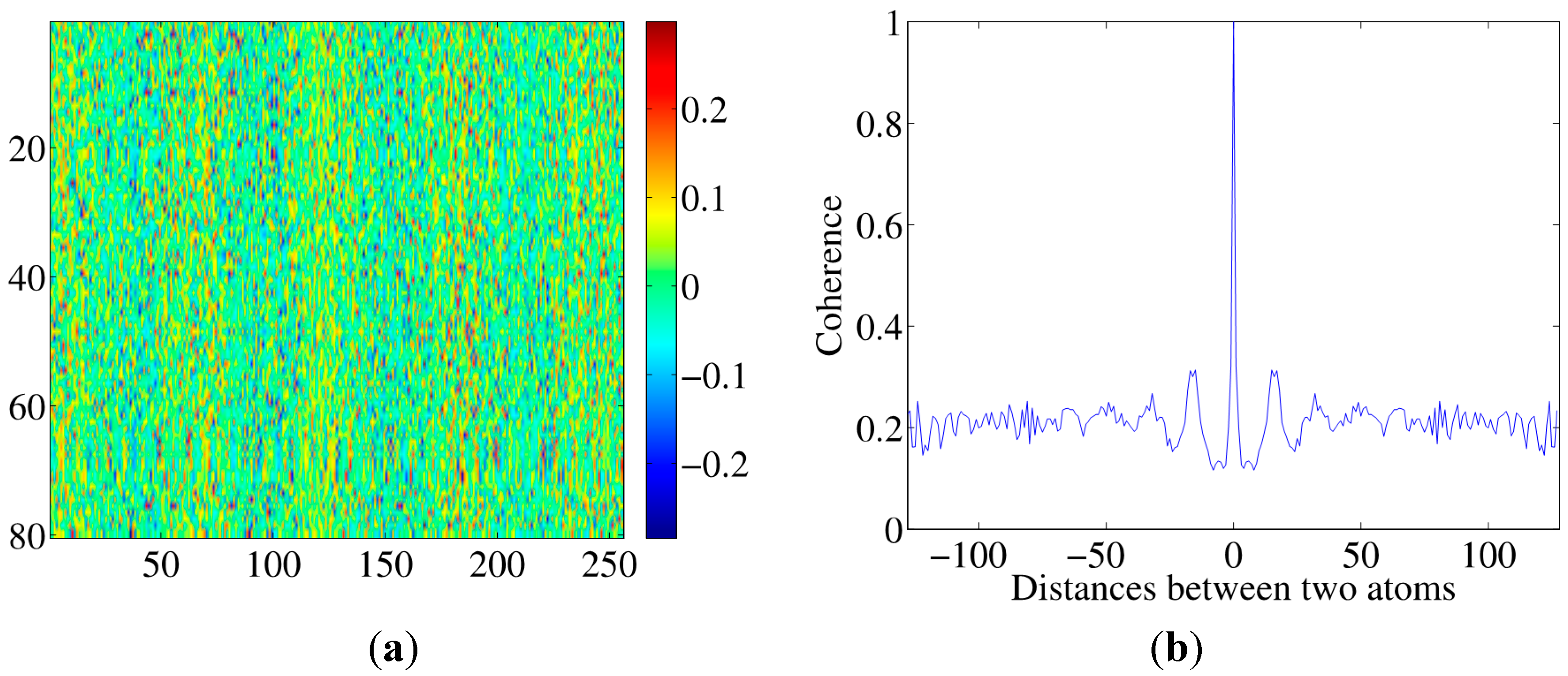
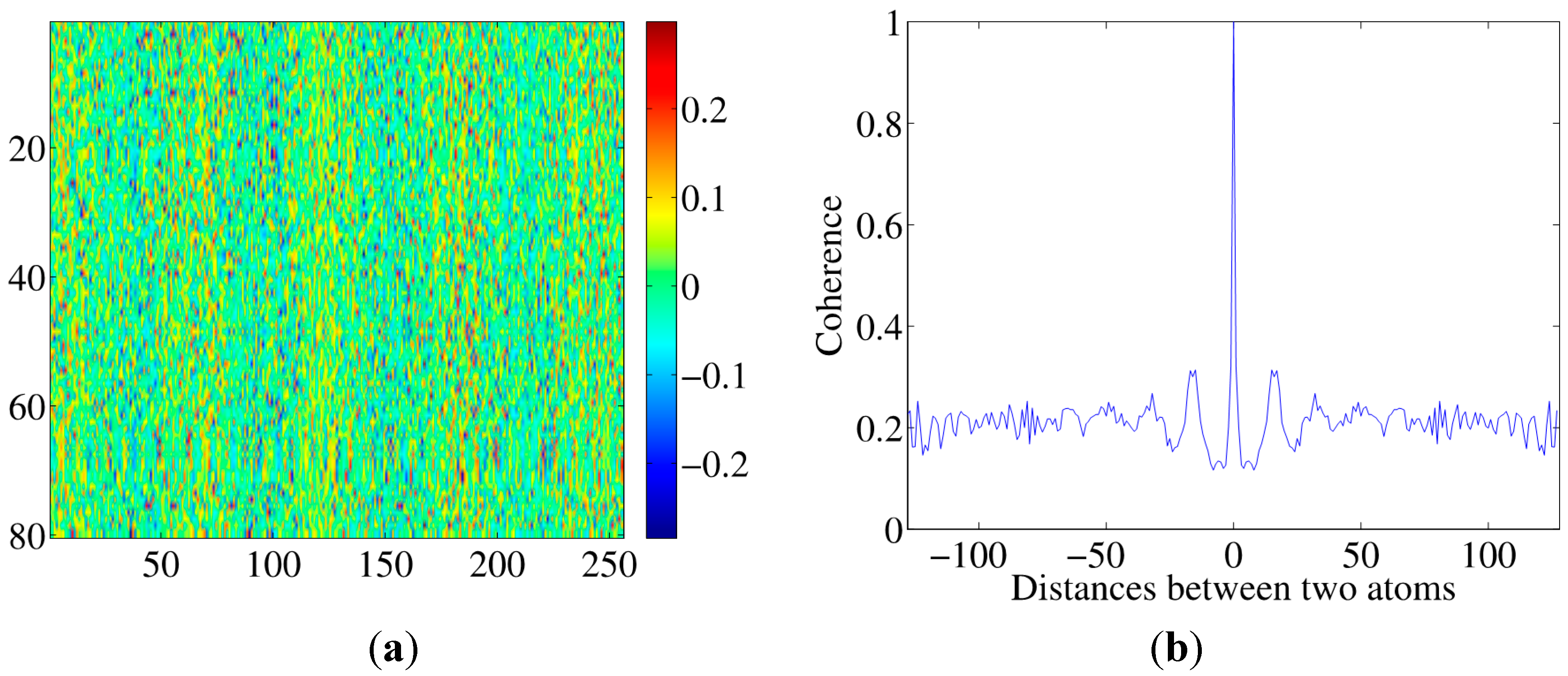
2.3. Robustness of Coherence
2.4. Multi-Frequency CS-MFP Case
3. CS-MFP Recovery with High Coherent Dictionaries via CCOOMP
| Algorithm 1 Coherence-Excluding Coherence Optimized Orthogonal Matching Pursuit (CCOOMP) |
1: Input: 2: Initialization: and 3: Iteration: For 4: 5: 6: 7: 8: return: |
| Algorithm 2 Coherence Optimization (CO) |
1: Input: 2: Iteration: For 3: 4: 5: return: |
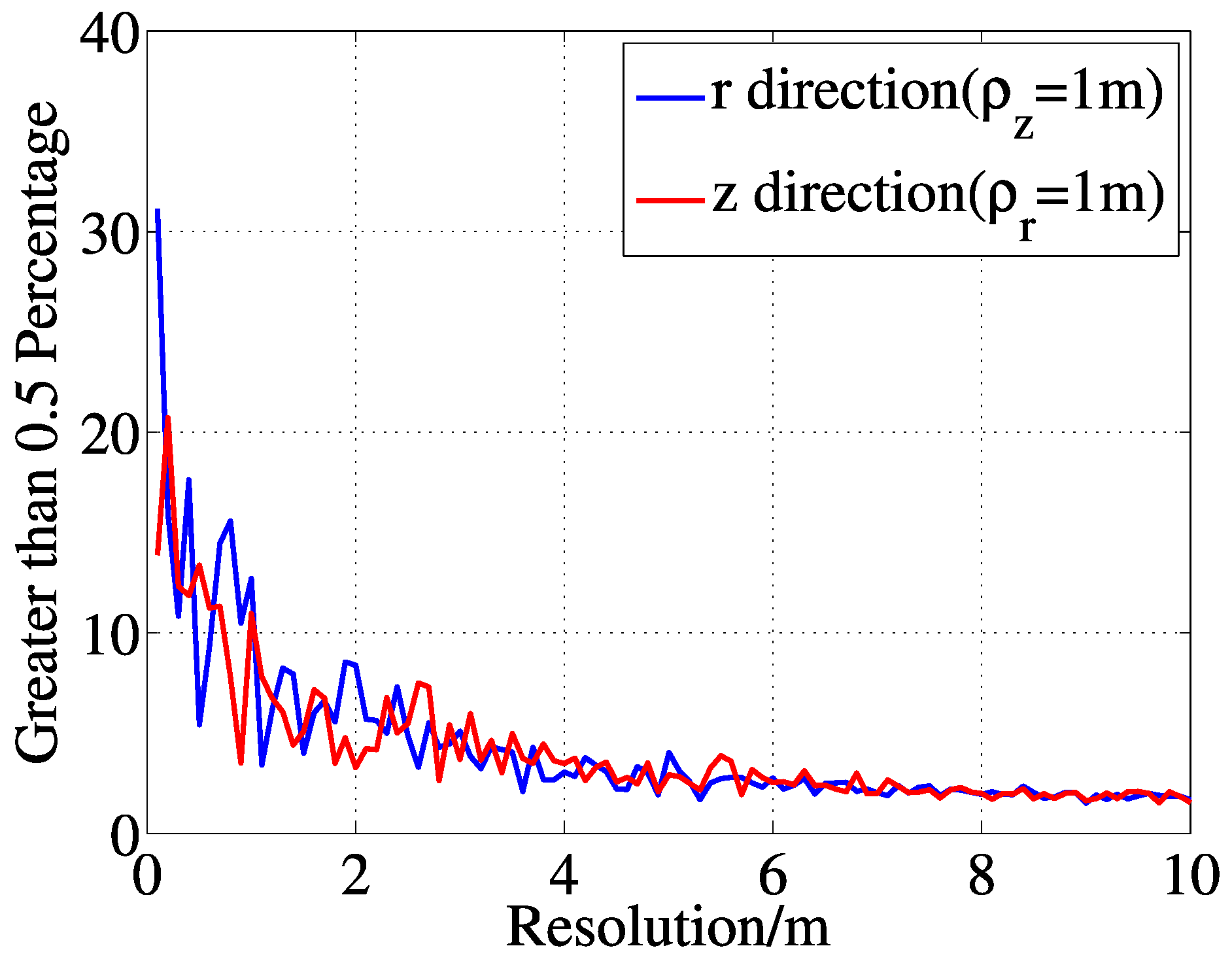
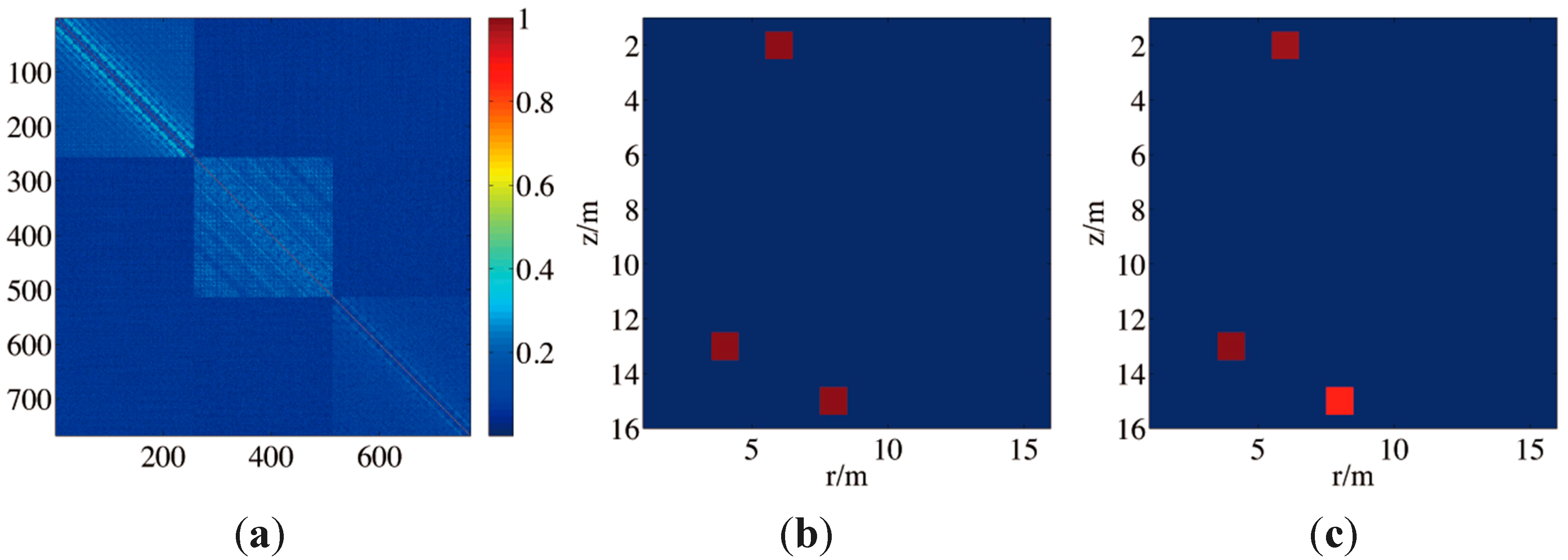
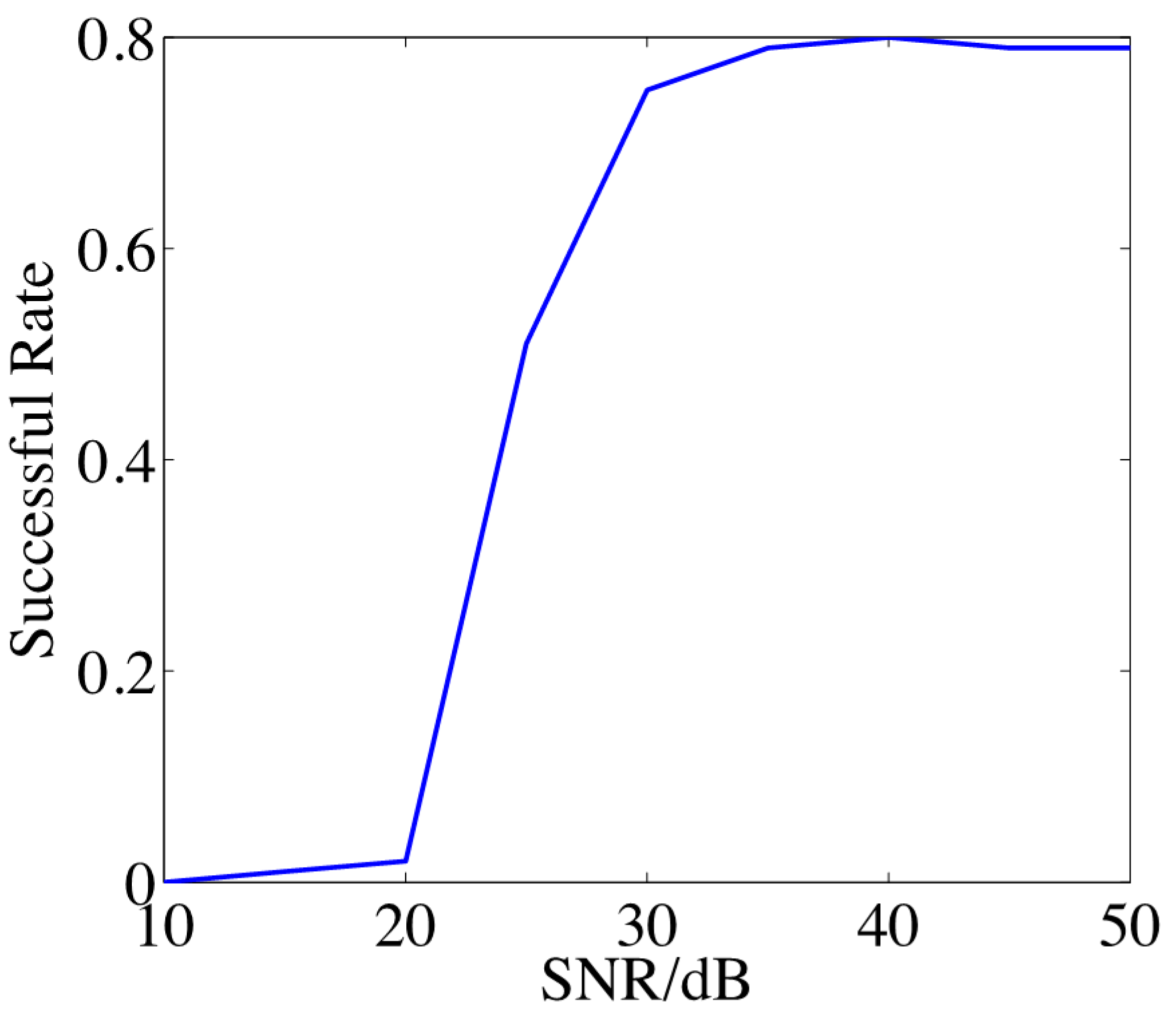
4. Numerical Experiments and Performance Analysis


5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Baggeroer, A.B.; Kuperman, W.A.; Schmidt, H. Matched field processing: Source localization in correlated noise as an optimum parameter estimation problem. J. Acoust. Soc. Am. 1998, 83, 571–587. [Google Scholar] [CrossRef]
- Tolstoy, A.; Diachok, O.; Frazer, L.N. Acoustic tomography via matched field processing. J. Acoust. Soc. Am. 1991, 89, 1119–1127. [Google Scholar] [CrossRef]
- Thode, A.M.; D’Spain, G.L.; Kuperman, W.A. Matched field processing, geoacoustic inversion, and source signature recovery of blue whale vocalizations. J. Acoust. Soc. Am. 2000, 107, 1286–1300. [Google Scholar] [CrossRef] [PubMed]
- Tolstoy, A. Matched Field Processing in Underwater Acoustics; World Scientific: Singapore, 1993; pp. 93–153. [Google Scholar]
- Baggeroer, A.B.; Kuperman, W.A.; Mikhalevsky, P.N. An overview of matched field methods in ocean acoustics. IEEE J. Ocean Eng. 1993, 18, 401–424. [Google Scholar] [CrossRef]
- Fannjiang, A.C.; Strohmer, T.; Yan, P. Compressed remote sensing of sparse objects. SIAM J. Imaging Sci. 2010, 3, 595–618. [Google Scholar]
- Fink, M.; Prada, C. Acoustic time-reversal mirror. Inverse Probl. 2001, 17. [Google Scholar] [CrossRef]
- Donoho, D.L. Compressed sensing. IEEE Trans. Inform. Theory 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Baraniuk, R.G. Compressive sensing. IEEE Signal Process. Mag. 2007, 24, 118–124. [Google Scholar] [CrossRef]
- Candes, E.J.; Romberg, J.K.; Tao, T. Stable signal recovery from incomplete and inaccurate measurements. Commun. Pure Appl. Math. 2006, 59, 1207–1223. [Google Scholar]
- Tropp, J.A.; Gilbert, A. Signal recovery from partial information via orthogonal matching pursuit. IEEE Trans. Inf. Theory 2007, 53, 4655–4666. [Google Scholar] [CrossRef]
- Lustig, M.; Donoho, D.L.; Pauly, J.M. Sparse MRI: The application of compressed sensing for rapid MR imaging. Magn. Reson. Med. 2007, 58, 1182–1195. [Google Scholar] [CrossRef] [PubMed]
- Herman, M.A.; Strohmer, T. High-resolution radar via compressed sensing. IEEE Trans. Signal Process. 2009, 57, 2275–2284. [Google Scholar] [CrossRef]
- Yan, H.; Xu, J.; Peng, S.; Zhang, X. A compressed sensing method for a wider swath in synthetic aperture imaging. In Proceedings of the IET Interantional Radar Conference, Xi’an, China, 14–16 April 2013; pp. 1–6.
- Yan, H.; Xu, J.; Xia, X.G.; Liu, F.; Peng, S.; Zhang, X.; Long, T. Wideband underwater sonar imaging via compressed sensing with scaling effect compensation. Sci. China Inf. Sci. 2015, 58, 1–11. [Google Scholar]
- Mantzel, W.; Romberg, J.; Sabra, K. Compressive matched-field processing. J. Acoust. Soc. Am. 2012, 132, 90–102. [Google Scholar] [CrossRef] [PubMed]
- Katsnelson, B.G.; Petnikov, V.G. Shallow Water Acoustics; Springer Science & Business Media: Berlin, Germany, 2002; pp. 165–180. [Google Scholar]
- Herman, M.A.; Strohmer, T. General deviants: An analysis of perturbations in compressed sensing. IEEE J. Sel. Top. Signal Process. 2010, 4, 342–349. [Google Scholar] [CrossRef]
- Chi, Y.; Scharf, L.L.; Pezeshki, A. Sensitivity to basis mismatch in compressed sensing. IEEE Trans. Signal Process. 2011, 59, 2182–2195. [Google Scholar]
- Duarte, M.F.; Baraniuk, R.G. Spectral compressive sensing. Appl. Comput. Harmonic Anal. 2013, 35, 111–129. [Google Scholar] [CrossRef]
- Fannjiang, A.C.; Liao, W. Coherence pattern-guided compressive sensing with unresolved grids. SIAM J. Imaging Sci. 2012, 5, 179–202. [Google Scholar] [CrossRef]
- Tang, G.; Bhaskar, B.N.; Shah, P.; Recht, B. Compressive sensing off the grid. IEEE Trans. Inf. Theory 2012, 59, 7465–7490. [Google Scholar] [CrossRef]
- Chen, Y.; Chi, Y. Robust spectral compressed sensing via structured matrix completion. IEEE Trans. Inf. Theory 2014, 60, 6576–6601. [Google Scholar]
- Stephens, R.W.B. Underwater Acoustics; John Wiley & Sons: New York, NY, USA, 1970. [Google Scholar]
- Tropp, J.A. Greed is good: Algorithmic results for sparse approximation. IEEE Trans. Inf. Theory 2004, 50, 2231–2242. [Google Scholar] [CrossRef]
- Yu, Y.; Petropulu, A.P.; Poor, H.V. MIMO radar using compressive sampling. IEEE J. Sel. Top. Signal Process. 2010, 4, 146–163. [Google Scholar]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, H.; Xu, J.; Long, T.; Zhang, X. Underwater Acoustic Matched Field Imaging Based on Compressed Sensing. Sensors 2015, 15, 25577-25591. https://doi.org/10.3390/s151025577
Yan H, Xu J, Long T, Zhang X. Underwater Acoustic Matched Field Imaging Based on Compressed Sensing. Sensors. 2015; 15(10):25577-25591. https://doi.org/10.3390/s151025577
Chicago/Turabian StyleYan, Huichen, Jia Xu, Teng Long, and Xudong Zhang. 2015. "Underwater Acoustic Matched Field Imaging Based on Compressed Sensing" Sensors 15, no. 10: 25577-25591. https://doi.org/10.3390/s151025577
APA StyleYan, H., Xu, J., Long, T., & Zhang, X. (2015). Underwater Acoustic Matched Field Imaging Based on Compressed Sensing. Sensors, 15(10), 25577-25591. https://doi.org/10.3390/s151025577