Complete Scene Recovery and Terrain Classification in Textured Terrain Meshes


Abstract
: Terrain classification allows a mobile robot to create an annotated map of its local environment from the three-dimensional (3D) and two-dimensional (2D) datasets collected by its array of sensors, including a GPS receiver, gyroscope, video camera, and range sensor. However, parts of objects that are outside the measurement range of the range sensor will not be detected. To overcome this problem, this paper describes an edge estimation method for complete scene recovery and complete terrain reconstruction. Here, the Gibbs-Markov random field is used to segment the ground from 2D videos and 3D point clouds. Further, a masking method is proposed to classify buildings and trees in a terrain mesh.1. Introduction
Object segmentation and classification are widely researched topics in surveying, mapping, and autonomous navigation by mobile robots [1,2]. These techniques allow a robot to navigate through and interact with its environment by providing quickly accessible and accurate information regarding the surrounding terrain [3].
The multiple sensors mounted on such robots collect terrain information only in the form of three-dimensional (3D) point clouds and two-dimensional (2D) images [4]. Then object classification methods are applied to these datasets to classify salient features [5,6].
When mobile robots, especially ground-based autonomous robots, detect surrounding terrain information, some parts of objects are outside the measurement of range sensors. Therefore the classification will be incomplete and inaccurate. This incompleteness can be addressed with video cameras, which can provide terrain scenes with complete scenes in the far field. However, it is difficult to estimate objects' surfaces using only video cameras. Thus, datasets from a multiple sensors [7] must be integrated for a terrain classification system that allows accurate and reliable map annotation.
Here we propose a method of terrain classification, consisting of ground segmentation and building and tree classification, using complete scene recovery. We use 3D point clouds and 2D images for fast ground segmentation method using the Gibbs-Markov random field (MRF) method with a flood-fill algorithm. To recover complete scenes, we propose the Gibbs-MRF method that detects the boundary pixels between objects and background in order to recover the missing tops of objects.
Considering that trees have a porous surface and buildings have a uniform distribution, we classify buildings and trees based on the horizon spatial distribution using a masking method. Finally, the terrain classification results are used to create a 3D textured terrain mesh, which is compatible with global information database collection, semantic map generation, and augmented reality applications.
The present paper is organized as follows: in Section 2, we discuss related work on multisensor integration, interpolation, ground segmentation, and object classification in real-world applications. In Section 3, we describe our proposed framework for terrain reconstruction and object classification. In Section 4, we analyze the results of the proposed ground segmentation, height estimation, and object classification methods. In Section 5, we present our conclusions.
2. Related Work
Real-world reconstruction involves several sub-processes, including terrain mesh generation, interpolation, traversable region assessment, and object classification.
2.1. Multisensor Integration
To represent a robot's surrounding terrain in a virtual environment, it is necessary to reconstruct a terrain model using an integrated dataset obtained from multiple sensors [8–12]. Rovira-Más [13] proposed a density grid for 3D reconstruction from information obtained from stereo cameras, a localization sensor, and an inertial measurement unit. Sukumar [3] provided a convenient visualization method by integrating sensed datasets into a textured terrain mesh. However, it is difficult for these systems to process the large datasets obtained in outdoor environments and achieve on-line rendering.
Other researchers have enhanced the performance of terrain reconstruction to provide on-line photo-realistic visualization. Kelly [9] describes real-world representation methods using video-ranging modules. In the near field, 3D textured voxel grids are used to describe the surrounding terrain, whereas a billboard texture in front of the robot is used to show scenes in the far field. However, a range sensor cannot sense all terrain information, often leaving empty spaces in the terrain model in practice.
2.2. Interpolation in Empty Regions
Recovery of these “unsensed” regions plays a major role in obstacle avoidance. Some researchers apply interpolation algorithms to fill empty holes and smooth terrain [14–17]. For example, to estimate such unobserved data, Douillard [18] interpolates grids in empty regions in elevation maps in order to propagate label estimates. However, it is difficult to use these methods to recover missing information that is beyond the measurement range of the sensors.
Wellington [19] applies a hidden semi-Markov model to classify terrain vertical structure into ground, trees, and free space classes for each cell of a voxel-based terrain model. Then an MRF algorithm is used to estimate ground and tree height. However, this height estimation process simply averages across cells using neighbor data and cannot estimate actual height values.
In hardware design research, Früh [7] utilizes a vertical 2D laser scanner to measure large buildings and represent streetscapes in urban environments. When an object is located between the sensors and a building, some regions of the building cannot be sensed by the laser scanner as they are blocked by the object. These missing regions can be easily filled by planar or horizontal interpolation algorithm.
2.3. Traversable Region Segmentation
Ground segmentation is a widely studied topic necessary to determine the traversable regions in a terrain. Pandian [2] classifies terrain features into rocky, sandy, and smooth classes solely from 2D images. The segmented results take the form of a rectangular grid, instead of polygon shape. Therefore, this method lacks precision.
The MRF algorithm is effective in object segmentation from 2D images and 3D point clouds [20–26]. However, it is difficult to specify the probability density functions (PDF) in MRF. To solve this problem, the Hammersley-Clifford theorem proves an equivalence relationship between MRF and the Gibbs distribution [25]. However, computation of the Gibbs-MRF is too complicated for real-time ground segmentation.
2.4. Object Segmentation and Classification
Object segmentation is necessary to extract features, implement classification, and generate a semantic map. Weiss [27] utilizes a RANSAC algorithm to detect the ground and organize a point cloud into several clusters by segmenting plants and measuring plant positions. Segmented plants are estimated with high accuracy. However, this method can only be used for small plants, because it cannot be applied to objects outside the sensor's measurement range.
Golovinskiy [28] proposed a graph-based object segmentation method. The 3D points sensed by the range sensor are grouped into nodes of a graph using the k-nearest neighbor algorithm. The min-cut algorithm is then applied to segment the nodes into several objects. Lalonde [29] segments 3D points into scatter-ness, linear-ness, and surface-ness saliency features. In this method, an object model with a special saliency feature distribution is trained off-line by fitting a Gaussian mixture model (GMM) using the expectation-maximization (EM) algorithm. New data can be classified on-line into the model with a Bayesian classifier.
Huber [30] proposed a semantic representation method for building components. The floor and ceiling components are identified by finding the bottom-most and top-most local maxima in the height histogram. After low-density cells in the ground plane histogram are removed, the wall lines are detected using the Hough transform.
Nüchter [8] described a feature-based object detection method for 3D point cloud classification. First, the plans are extracted from the 3D point cloud using the RANSAC algorithm. Then, the wall, floor, ceiling, and other objects are labeled according to the defined scene interpretation. Finally, the objects are detected from a 2D image taken from the 3D rendering result.
In this paper, we discuss a multisensor integration method. For ground segmentation, we use the Gibbs-MRF and a flood-fill algorithm. Further, in contrast to interpolation methods, we propose a height estimation algorithm to recover unsensed regions, especially for objects at a height and outside the sensor's range of measurement.
3. Terrain Reconstruction and Object Classification
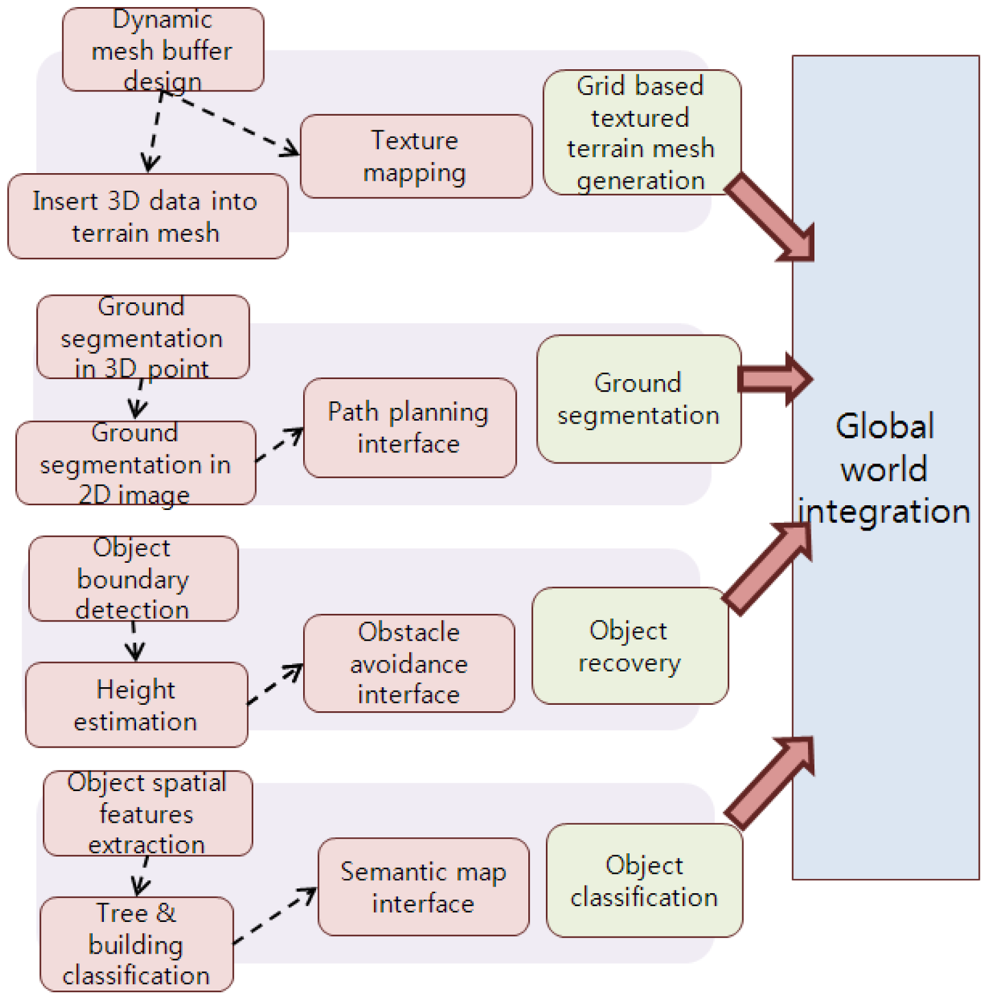
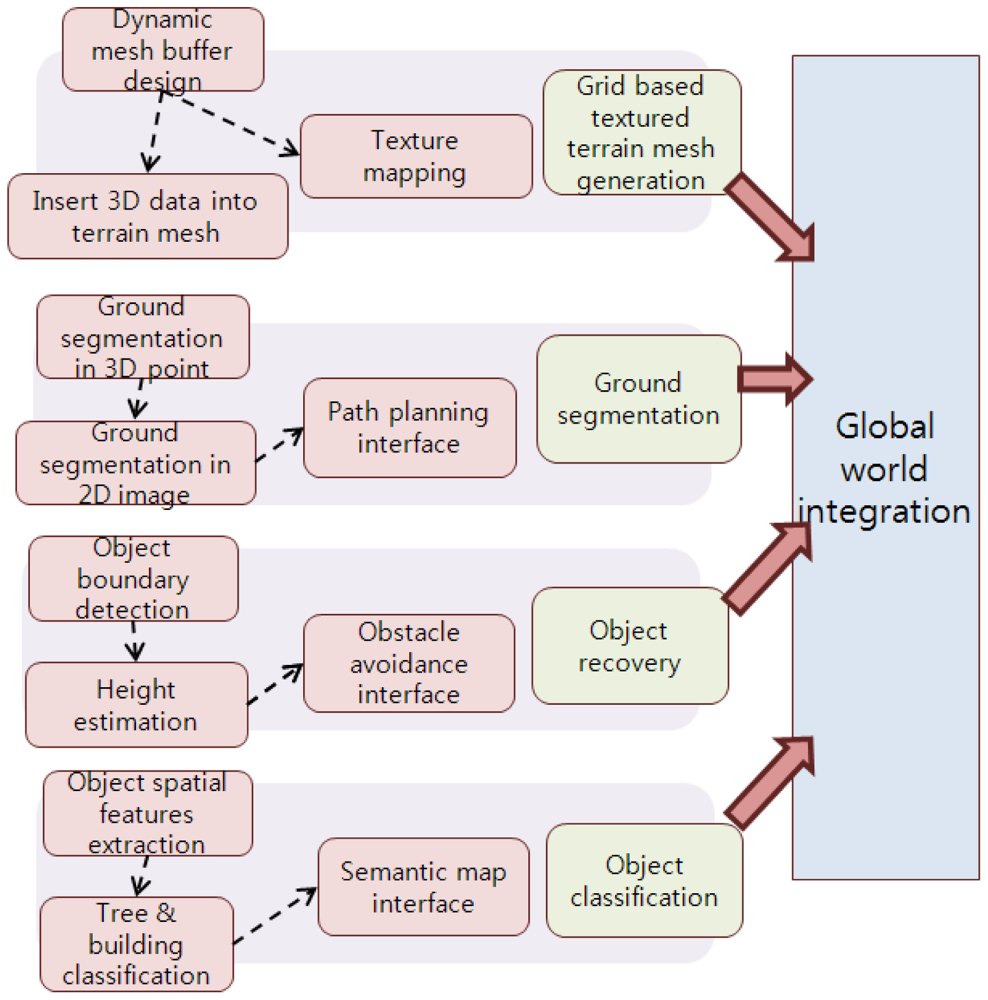
We describe a framework for outdoor terrain reconstruction and object classification, as shown in Figure 1. The integrated sensors provide a dataset of 2D images, 3D point clouds, and mobile robot navigation information. We integrate these dataset into a grid-based textured terrain mesh. Then, we describe a ground segmentation method that identifies the features such as the ground, obstacles, and the background.
As mentioned, for objects partially beyond the range of detection of the range sensor, we propose a height estimation method to recover the complete scene in the terrain mesh. Finally, we classify the objects into buildings and trees on the basis of their spatial distribution.
3.1. Grid-Based Textured Terrain Mesh
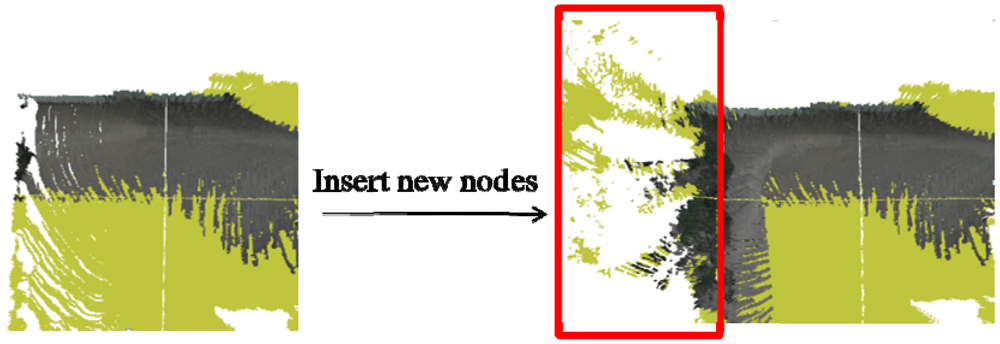
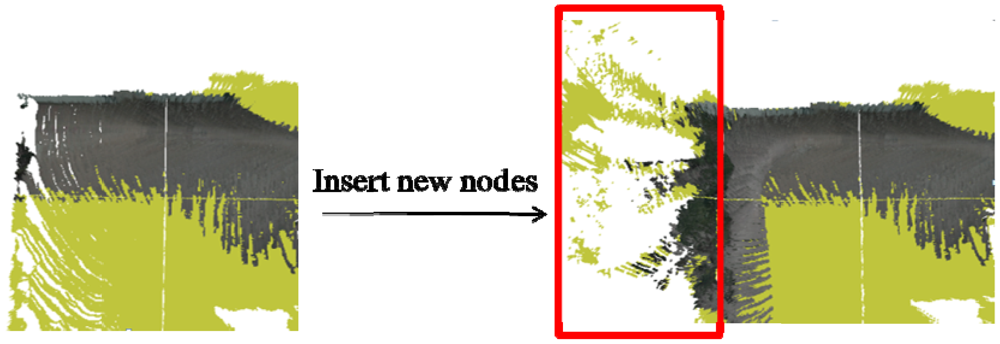
We integrate the sensed dataset into a grid-based textured terrain mesh. First, we project the 3D points onto the 2D image in front of the robot and get a coordinate in 2D image, named UV vector, for each 3D point. Then, we transform the local 3D points into global coordinates, and register them on the terrain mesh. The terrain mesh is generated using several grids, each with 151 × 151 textured vertices. In this application, the cell size is 0.125 × 0.125 m2. The height value of each cell is updated with the registered 3D points. If a new 3D point is to be inserted into the reconstructed terrain mesh but is outside the existing grids, we create a new grid to register this point, as shown in Figure 2.
After registration of all points, a ground segmentation algorithm is implemented to segment ground data and non-ground data in the 2D image. Then, a height estimation method is used to recover the missing regions outside the sensor's measurement range. Finally, the tree and building objects are classified using a classification operation. In our implementation, the user controls a virtual camera to study the reconstructed terrain from different viewpoints. A virtual robot model is loaded on the terrain to show the robot's navigation information in the real world.
3.2. Ground Segmentation Method
We classify each pixel in the 2D image into ground and non-ground classes on the basis of the probability of it being in that configuration, which depends on its connected neighbors. Therefore, we can apply the MRF for ground segmentation. However, it is difficult to determine the probability because it must be computed from local and neighbor observations. According to the Hammersley-Clifford theorem, we can solve this problem using the Gibbs-MRF model.
Given observation d and configuration f, we find the best possible configuration f* for site s using the following optimum solution:
The probability of a site's configuration is calculated using the Gibbs distribution [22]:
We define a clique as a neighboring set, and a clique set C as a collection of single-site and pair-site cliques. A potential function Vc(f) is defined to evaluate the effect of neighbor sites in clique c.
According to the Bayes' rule, the solution of Equation (1) is as follows:
The energy function of U(d|f) + U(f) is defined to evaluate the effect of the neighbor sites in single-site and pair-site potential cliques, as follows:
The evaluations of the clique potential functions V1(fs) and V1(ds|fs) depend on the local configuration and observations of clique C1. The clique potential functions V2(fs, fs') and V2(ds, ds'|fs, fs') are evaluations of the pair-site consistency of clique C2.
When we apply the Gibbs-MRF to ground segmentation in a 2D image, we first determine a set of pixels whose configurations are in the ground class with high confidence. We initially segment the 3D points as ground data using the robot vehicle's height h1 as the standard. We assume that if the y coordinate of a 3D point is ranging from −h1 − Δ to −h1 + Δ, then this point is ground data, as shown in Figure 3. This step is a rough ground segmentation process, which produces a dataset G1.
Then we find the projected pixels in the 2D image from the points in G1, using the projection matrix as follows:
We apply the Gibbs-MRF algorithm to classify the configurations of other pixels into the ground or non-ground classes. We consider that:
If the configuration of site s is same as its observation, the probability of this configuration is high.
If the configuration of site s is same as the configuration of its neighboring site s', the probability of this configuration is high.
If the configuration of site s is same as the configuration of its neighboring site s', and the difference between these observations ds and ds′ is low, the probability of this configuration is high.
The clique potential functions are formulated as follows:
Here, the constants α, β, and γ are positive numerical values. The configuration fs depends on whether the pixel s belongs to the ground dataset . The formula ‖ds – ds'‖ is defined as the color difference between observations ds and ds'.
We derive Equation (5) using the potential functions defined in Equations (9–12), and label the configuration of each pixel.
To reduce the computation load of Gibbs-MRF, we apply a flood-fill algorithm to compute the configurations of pixels inside the boundary between ground and non-ground. The pseudocode for ground segmentation using the flood-fill algorithm is as follows:
| for each site s in |
| configuration f(s) = ground; |
| enqueue neighbour sites of s into a queue Q; |
| while (Q is not empty) |
| dequeue a site s′ from the Q; |
| if (f* (s′) =ground) |
| enqueue neighbor sites of s′ into Q; |
| endif; |
| endwhile; |
| endfor; |
Starting with the pixel set , we estimate the configurations of the neighboring pixels. We apply the Gibbs-MRF algorithm to classify the configurations of other pixels into the ground or non-ground classes.
The pixels with a ground configuration are grouped into dataset , which is shown as the blue region. The other regions contain objects and background textures. We classify the ground vertices in the 3D terrain mesh, which are mapped to the pixels in the dataset , as shown in Figure 11(b).
3.3. Complete Scene Recovery
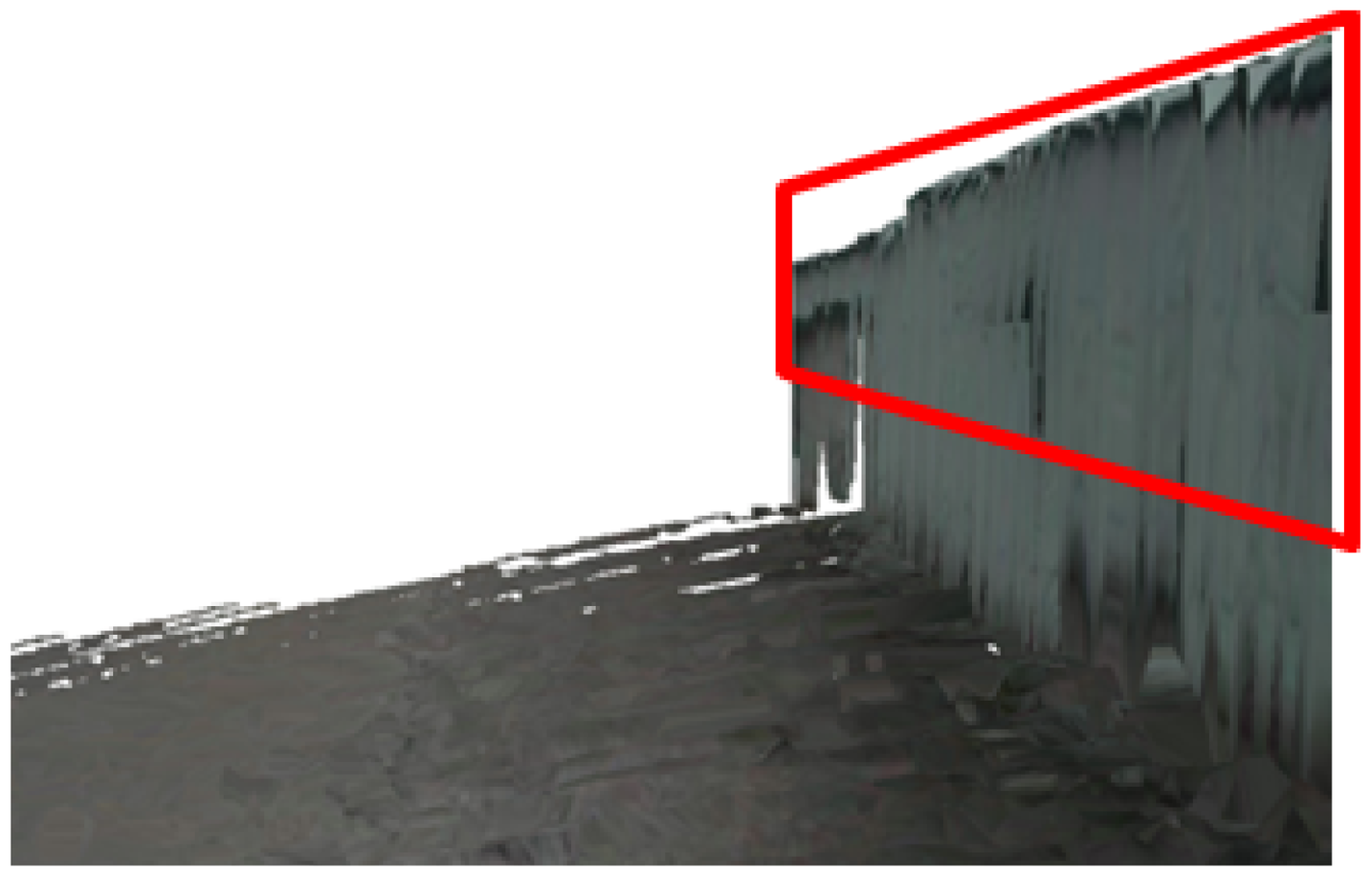
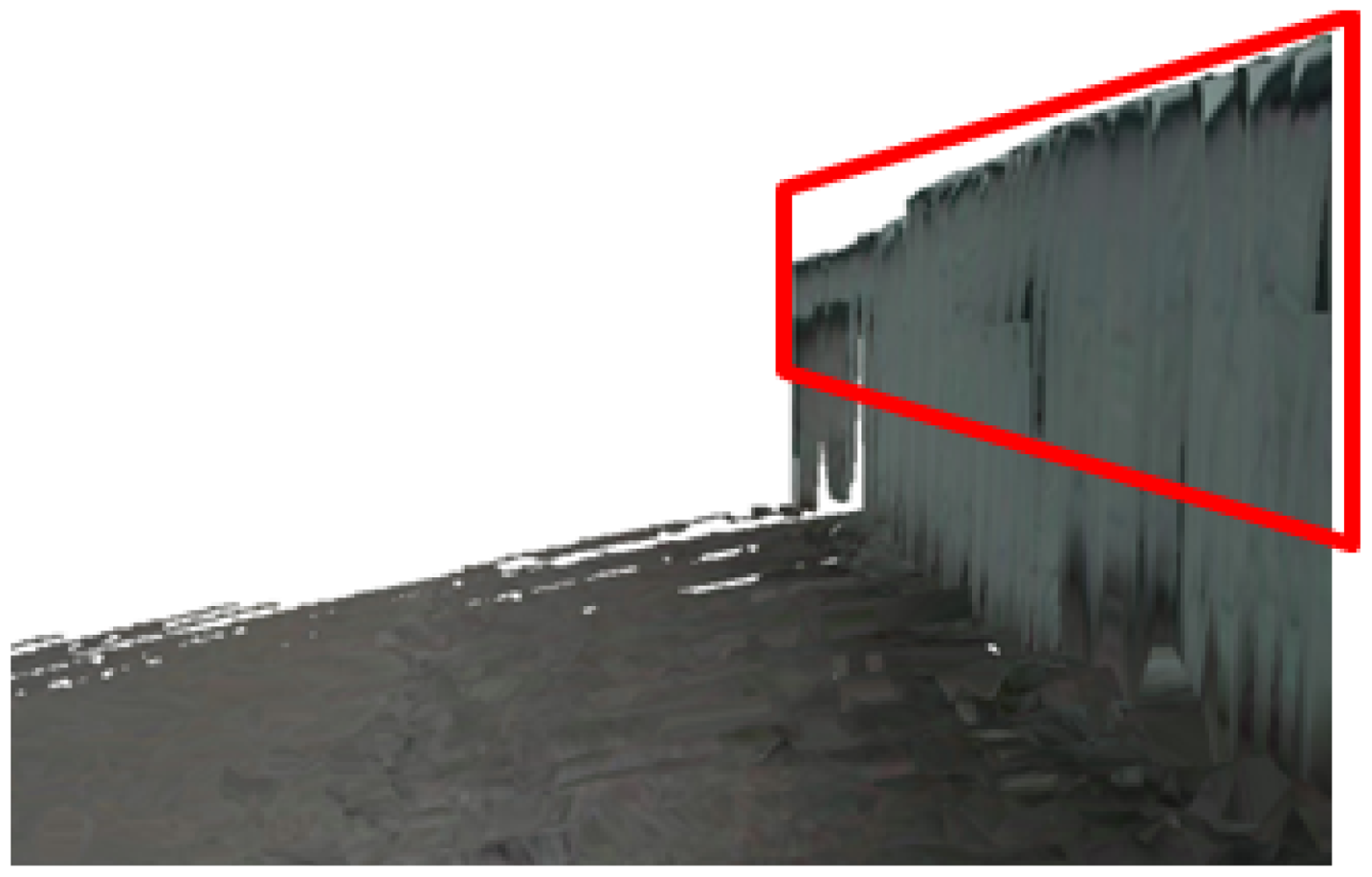
When mobile robots detect surrounding terrain information, some parts of objects are outside the measurement of range sensors. We see that the top of the building is missing in the terrain reconstruction result, shown as Figure 5.
We propose a height estimation method to solve the problem of missing regions by estimating the y coordinate of an object's top boundary.
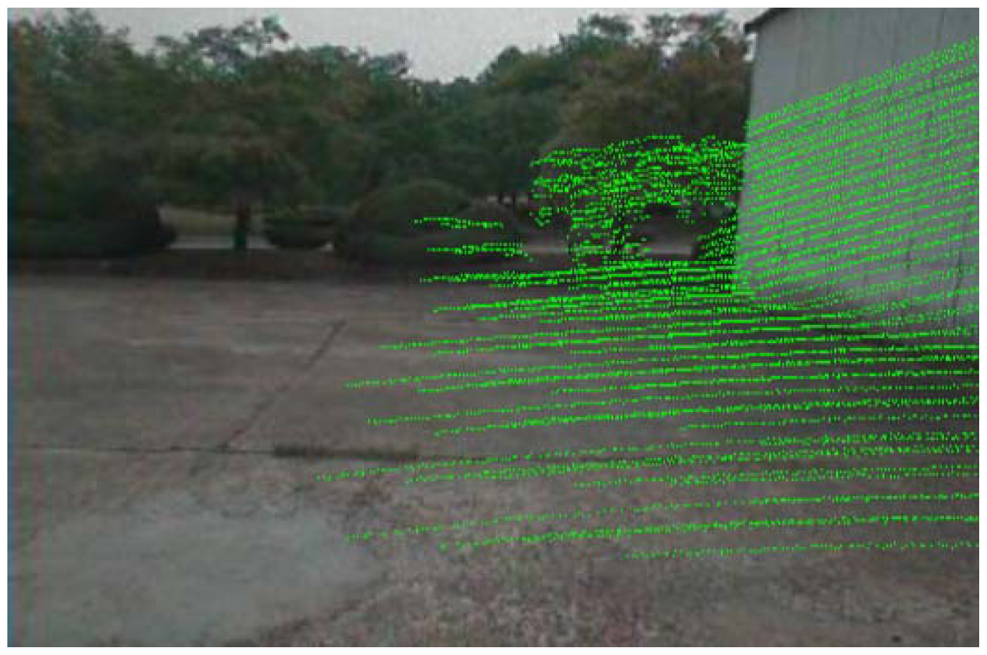
Using the ground data segmentation result, we assume that the non-ground vertices in the terrain mesh belong to objects, because background data, such as the sky, cannot be sensed by the range sensor. Next, we project these vertices onto pixels in a 2D image, whose configuration is determined as being part of an object. We apply the Gibbs-MRF method to classify the non-ground pixels into objects and background classes, in order to detect the boundary pixels between objects and background. The boundary detection results are shown as red pixels in Figure 6.
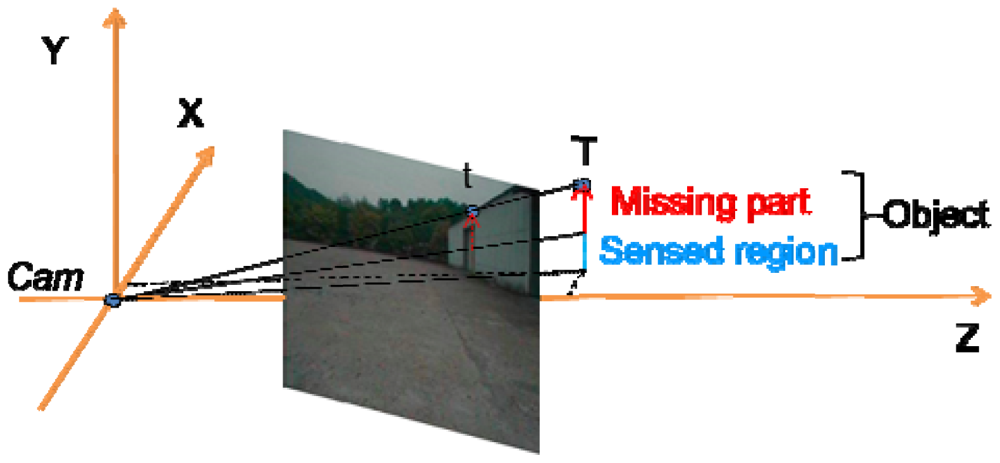
We find the boundary's y coordinates using an inverse process of projection from 2D pixels to 3D points. We place the camera centre at the origin. The projection ray from the origin to the object vertex gives an estimate of the height of that object vertex, as shown in Figure 7. Because the horizon coordinates of the 3D object vertex in the terrain mesh are fixed, we update the elevation value of each object vertex in the terrain mesh to obtain the results shown in Figure 8.
3.4. Building and Tree Classification
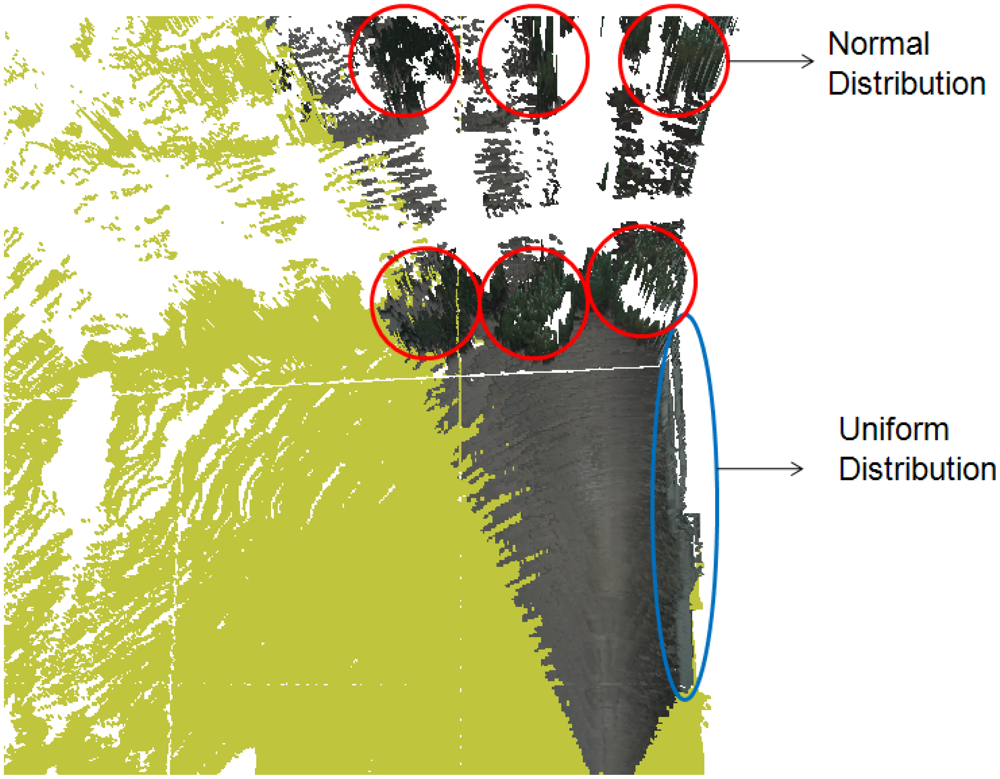
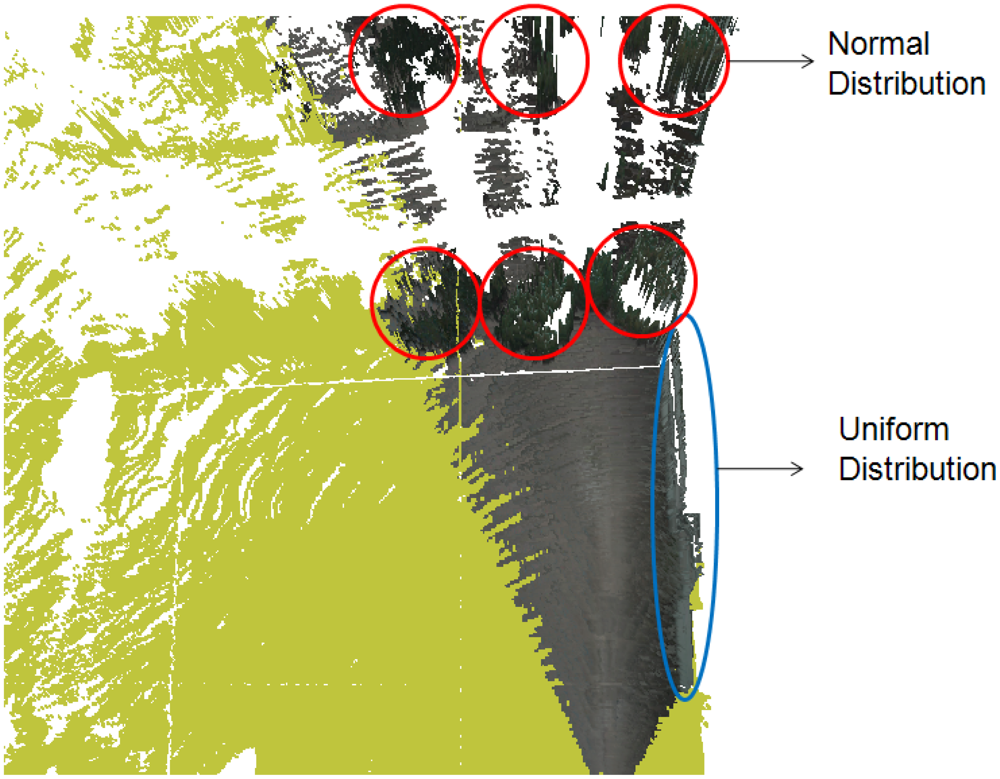
We consider tree objects, including both grass and trees, to have a porous surface that allows rays from the range finder to pierce through to the inside. This is in contrast to buildings, for which the 3D range finder only detects points on the outer surface. Therefore, the horizon shape of a building has a uniform distribution, whereas that for a tree has a normal distribution. As shown in Figure 9, we can see that the horizon structure of the buildings consists of the line-like components. We classify buildings by detecting these lines using the masks described in Figure 10.
The convolution function for the masking method is:
4. Experiments
Experiments were carried out using a mobile robot with integrated sensors, including a GPS receiver, gyroscope, video camera, and range sensor. We utilized HDL-32E Velodyne sensor to scan 3D points in an unknown environment. It provides approximately 694,292 laser shots per second. The Valid Data Range is approximately 70 m. The proposed algorithms were implemented by the laptop with an 2.82 GHz Intel(R) Core(TM)2 Quad CPU, a GeForce GTX 275 graphics card and 4 GB RAM. We drove the robot around an outdoor area of 104 square meters, including buildings and trees. The upper parts of these objects were outside the range of sensor, but were captured in the 2D images.
The final terrain classification result, as shown in Figure 11, is obtained in five steps: first, we reconstruct a textured terrain mesh in a virtual environment by integrating the packages. Then, we segment the ground vertices in the terrain mesh and map them onto 2D pixels. Next, we segment all the ground pixels using the Gibbs-MRF model with the flood-fill algorithm. Then, we estimate object boundaries in the 2D images using the object vertices in the terrain mesh and evaluate the height of each object cell in the terrain mesh. Finally, we classify buildings and trees in the terrain mesh based on the proposed masking method. Because we classify building objects in x-z plane, some pixels of trees exist above the buildings in Figure 11(d).
We discuss the ground segmentation results by using a confusion matrix, which is shown in Table 1. The ground and non – ground rows represent the actual ground and non-ground classes respectively. The and columns represent the inferred ground and non-ground classes respectively.
We segment the ground data in a 2D image with 512 × 256 pixels. The confusion matrix is computed by a supervised method. We group the pixels into ground and non-ground classes manually. If an actual ground pixel is grouped under the ground class, the inferred class increases by one. If not, increases by one.
Table 1 indicates that 97.68% of the ground region has been segmented on average. The ratio of the inferred errors to the actual classes, including ground and non-ground, is 3.19% on average.
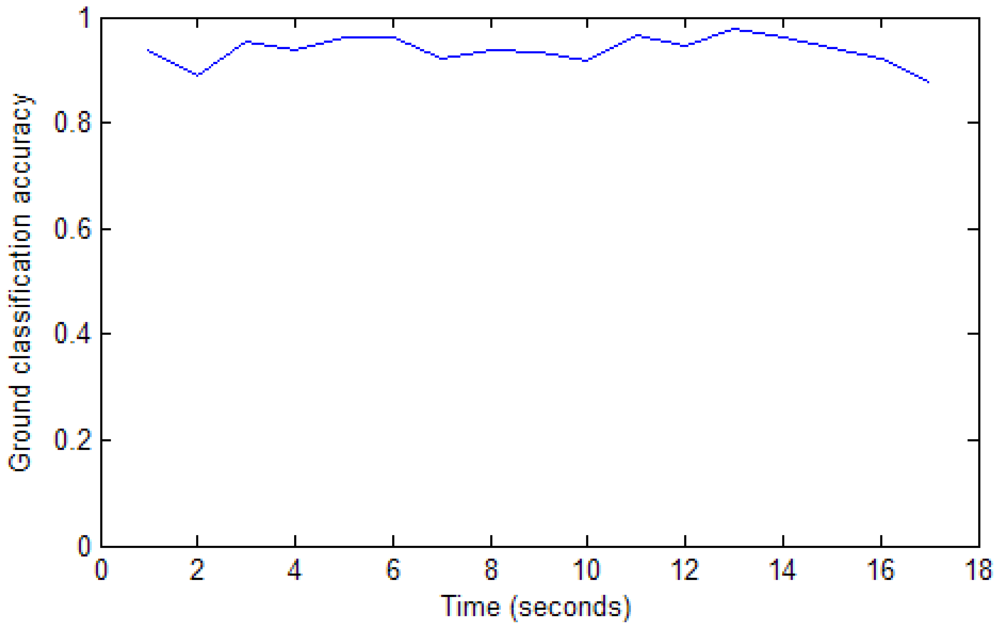
We implement the ground segmentation in 2D image every second. Figure 12 shows the ground classification accuracy samples during the robot navigated in an unknown environment. The accuracy value is calculated as the ratio between the inferred ground pixels and the actual ground pixels.
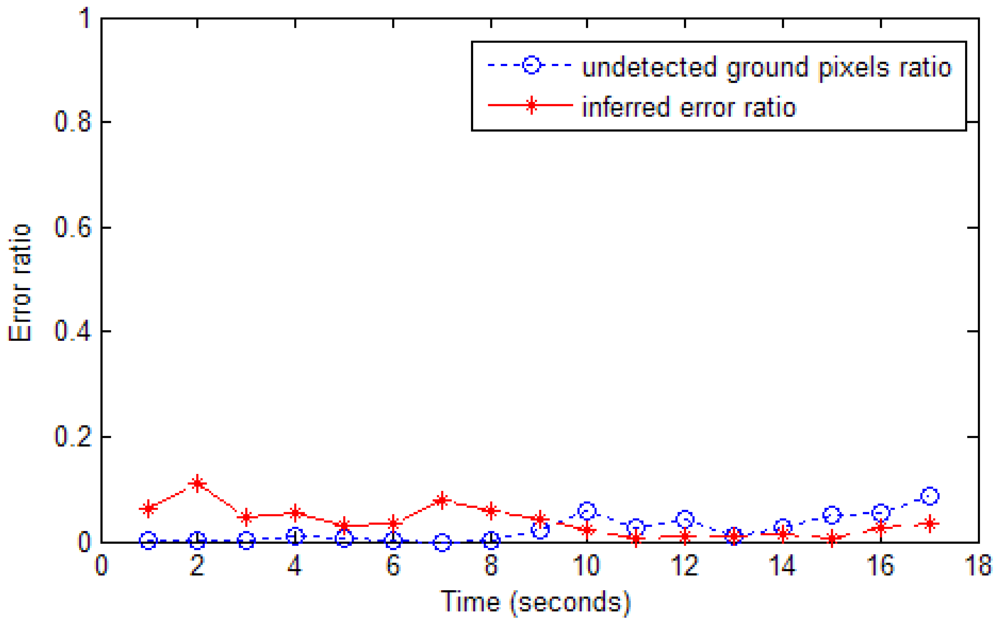
We define two types of classification errors in this project. One of them results from undetected ground pixels. If ground pixels are inferred as non-ground pixels, we define them as inferred errors. Figure 13 shows samples of undetected ground pixel ratio and inferred error ratio.
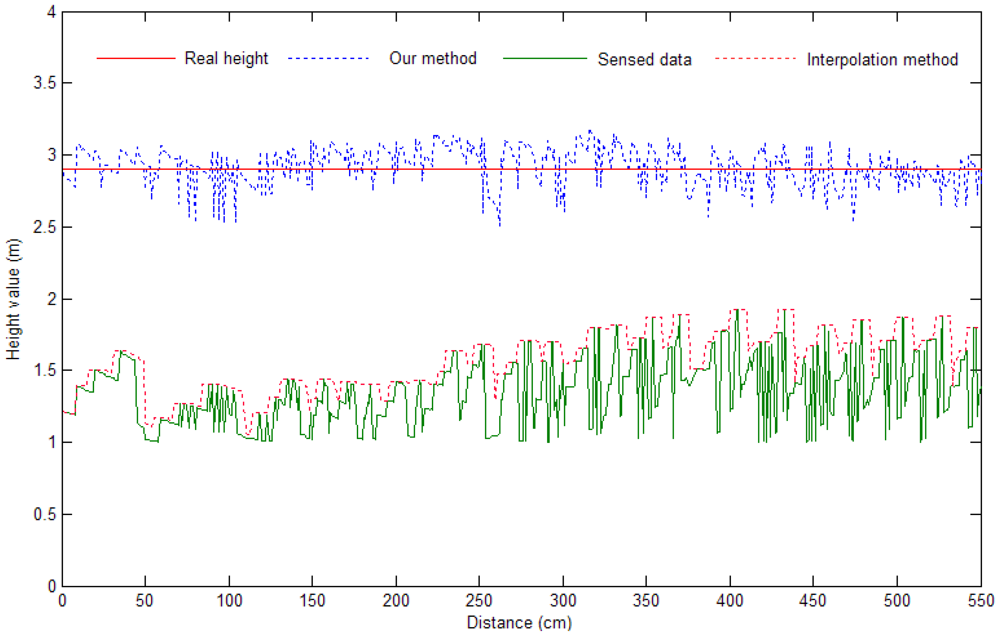
We then detect the edge of objects by using the non-ground classification result. We investigate the performance of the proposed height estimation method by comparing the obtained values with the actual heights (2.90 m on average). Since the range sensor scans objects only up to a height of 1.8 m, the upper parts of buildings cannot be sensed. However, as shown in Figure 14, we recover the missing parts from the incomplete terrain mesh, and the average estimated height value is 2.92 ± 0.11 m. In Figure 14, the x-axis represents the distance between the estimated vertices with the first estimated vertex.
The previously proposed interpolation algorithms average the empty region using the surrounding 3D points. These methods do not recover the actual shape of the unsensed region. However, using our proposed height estimation method, we successfully recover the actual shape of the missing parts.
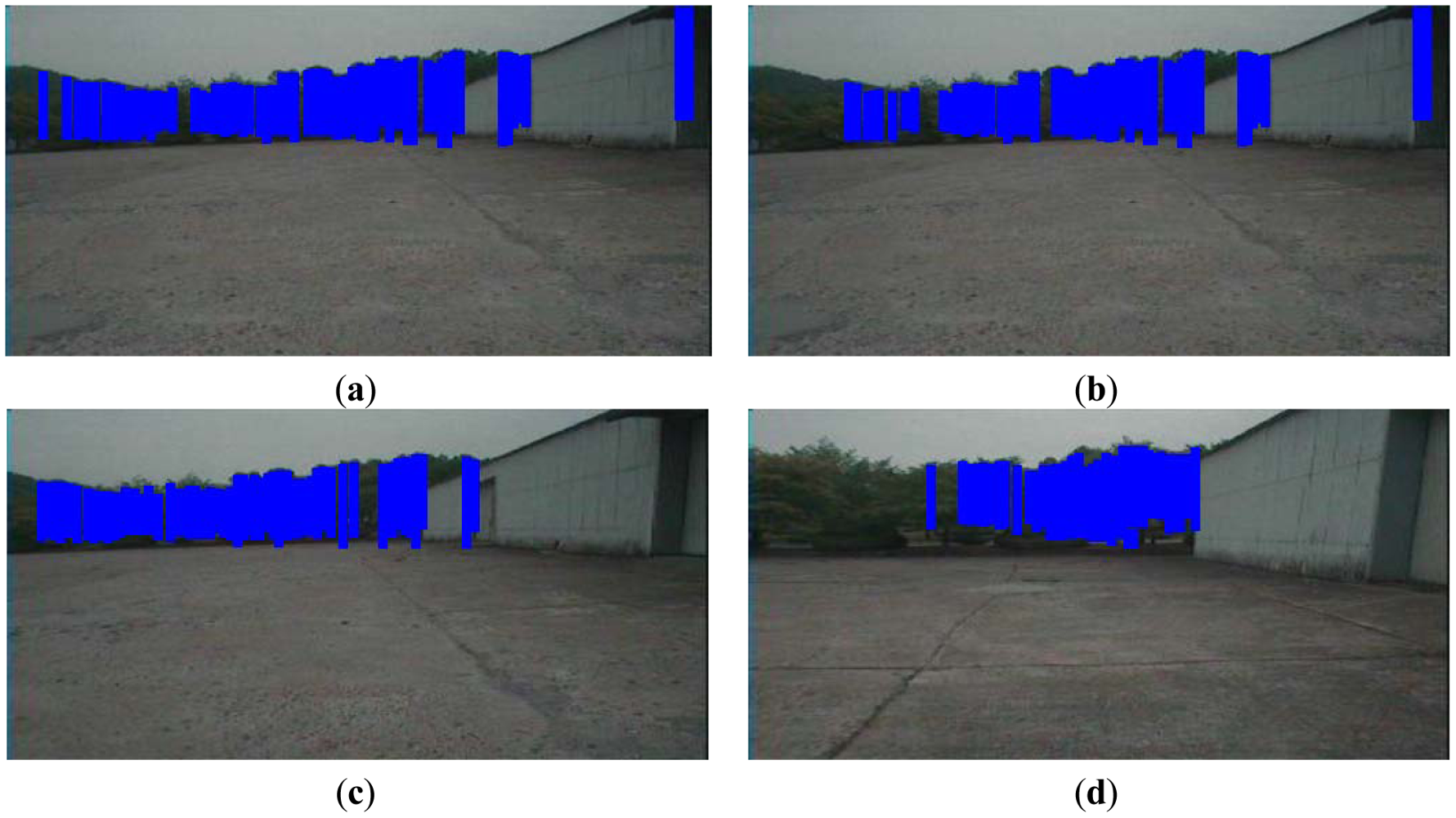
We render the textured terrain mesh and represent the texture of the ground, trees, and buildings at an average of 11.43 frames per second (FPS) using the Gibbs-MRF model along with the flood-fill algorithm. This is faster than the case where only the Gibbs-MRF model is used (8.37 FPS). After recovering complete scenes in the terrain mesh, we classify objects into tree and building classes. The tree classification results are indicated in blue color in the 2D images in Figure 15. In the 50th and 100th frames, the objects are located far from the robot, so that noise exists in the sensed objects, especially at the corners. When the robot moves closer to the building in the 200th frame, the corner shape is detected accurately. The corner pixels are grouped in the building class. When the robot is located near the trees in the 800th frame, the accuracy of the range sensor is higher than that when the robot is far from the trees. Finally, the noise in the spaces between the trees is removed in the reconstructed terrain mesh.
We use a manual supervised method to classify the pixels in the 2D images of Figure 15(a–d) into tree and building objects. By using the inferred results and through manual classification, the confusion matrices in Tables 2–5 are obtained. When the robot moves closer to the objects, the spatial distribution of the objects is detected with low noise; in this case, object classification is performed correctly and the error ratio is low.
5. Conclusions
This paper described a method of effective segmentation of ground, buildings, and trees for automated surveying and mapping by mobile robots. The method was found effective in an outdoor environment for a mobile robot with a range sensor, video camera, GPS receiver, and a gyroscope.
The complete shape of objects that are partly outside sensors' range of measurement is accurately recovered. The accurate height estimation allowed successful classification of buildings and trees on the basis of their spatial distribution. However, the height estimation algorithm does not work well for recovering the buildings which are not uniform in color or have overhanging roofs. In future, we will improve the system to deal with these problems.
Acknowledgments
This work was supported by the Agency for Defense Development, South Korea.
References
- Matsushita, Y.; Miura, J. On-line road boundary modeling with multiple sensory features, flexible road model, and particle filter. Robot. Auton. Syst. 2011, 59, 274–284. [Google Scholar]
- SoundraPandian, K.K.; Mathur, P. Traversability Assessment of Terrain for Autonomous Robot Navigation. Proceedings of the International MultiConference of Engineers and Computer Scientists, Hong Kong, China, 17–19 March 2010; Volume 2. pp. 17–20.
- Sukumar, S.R.; Yu, S.J.; Page, D.L.; Koschan, A.F.; Abidi, M.A. Multi-Sensor Integration for Unmanned Terrain Modeling. Proceedings of the SPIE Unmanned Systems Technology VIII, Orlando, FL, USA, 17– 20 April 2006; Volume 6230. pp. 65–74.
- Huber, D.; Herman, H.; Kelly, A.; Rander, P.; Ziglar, J. Real-Time Photo-realistic Visualization of 3D Environments for Enhanced Tele-operation of Vehicles. Proceedings of the International Conference on 3D Digital Imaging and Modeling (3DIM), Kyoto, Japan, 3–4 October 2009; pp. 1518–1525.
- Saxena, A.; Chung, S.H.; Ng, A.Y. 3-D depth reconstruction from a single still image. Int. J. Comput. Vis. 2008, 76, 53–69. [Google Scholar]
- Kim, G.H.; Huber, D.; Hebert, M. Segmentation of Salient Regions in Outdoor Scenes Using Imagery and 3D Data. Proceedings of the IEEE Workshop on Applications of Computer Vision (WACV08), Copper Mountain Resort, CO, USA, 7– 9 January 2008; pp. 1–8.
- Früh, C.; Zakhor, A. Data processing algorithms for generating textured 3D building facade meshes from laser scans and camera images. Int. J. Comput. Vis. 2005, 61, 159–184. [Google Scholar]
- Nüchter, A.; Hertzberg, J. Towards semantic maps for mobile robots. Robot. Auton. Syst. 2008, 56, 915–926. [Google Scholar]
- Kelly, A.; Chan, N.; Herman, H.; Huber, D.; Meyers, R.; Rander, P.; Warner, R.; Ziglar, J.; Capstick, E. Real-time photorealistic virtualized reality interface for remote mobile robot control. Int. J. Robot. Res. 2011, 30, 384–404. [Google Scholar]
- Yu, S.J.; Sukumar, S.R.; Koschan, A.F.; Page, D.L.; Abidi, M.A. 3D reconstruction of road surfaces using an integrated multi-sensory approach. Opt. Lasers Eng. 2007, 45, 808–818. [Google Scholar]
- Schiewe, J. Integration of multi-sensor data for landscape modeling using a region-based approach. ISPRS J. Photogram. Remote Sens. 2003, 57, 371–379. [Google Scholar]
- Sequeira, V.; Ng, K.; Wolfart, E.; Gonçalves, J.G.M.; Hogg, D. Automated reconstruction of 3D models from real environments. J. Photogramm. Remote Sens. 1999, 54, 1–22. [Google Scholar]
- Rovira-Más, F.; Zhang, Q.; Reid, J.F. Stereo vision three-dimensional terrain maps for precision agriculture. Comput. Electron. Agric. 2008, 60, 133–143. [Google Scholar]
- Kraus, K.; Pfeifer, N. Determination of terrain models in wooded areas with airborne laser scanner data. J. Photogramm. Remote Sens. 1998, 53, 193–203. [Google Scholar]
- Huang, Y.M.; Chen, C.J. 3D fractal reconstruction of terrain profile data based on digital elevation model. Chaos Soliton. Fractal. 2009, 40, 1741–1749. [Google Scholar]
- Kobler, A.; Pfeifer, N.; Ogrinc, P.; Todorovski, L.; Oštir, K.; D(x0017E)eroski, S. Repetitive interpolation: A robust algorithm for DTM generation from aerial laser scanner data in forested terrain. Remote Sens. Environ. 2007, 108, 9–23. [Google Scholar]
- Hugentobler, M.; Schneider, B. Breaklines in Coons surfaces over triangles for the use in terrain modeling. Comput. Geosci. 2005, 31, 45–54. [Google Scholar]
- Douillard, B.; Brooks, A.; Ramos, F. A 3D Laser and Vision Based Classifier. Proceedings of the Fifth International Conference on Intelligent Sensors, Sensor Networks and Information Processing, Melbourne, Australia, 7–10 December 2009; pp. 295–300.
- Wellington, C.; Courville, A.; Stentz, A. A generative model of terrain for autonomous navigation in vegetation. Int. J. Robot. Res. 2006, 25, 1287–1304. [Google Scholar]
- Kindermann, R.; Snell, J.L. Markov Random Fields and Their Applications; American Mathematical Society (AMS): Providence, RI, USA, 1980. [Google Scholar]
- Besag, J. Spatial interaction and the statistical analysis of lattice systems. J. R. Statist. Soc. 1974, 36, 192–236. [Google Scholar]
- Geman, S.; Geman, D. Stochastic relaxation, Gibbs distribution, and the Bayesian restoration of images. J. Appl. Statist. 1984, 6, 721–741. [Google Scholar]
- Zeng, W.; Gao, W. Semantic Object Segmentation by a Spatio-Temporal MRF Model. Proceedings of the International Conference on Pattern Recognition, Cambridge, UK, 23–26 August 2004; pp. 775–778.
- Perez, P. Markov random fields and images. CWI Q. 1998, 11, 413–437. [Google Scholar]
- Szirányi, T.; Zerubia, J.; Czúni, L.; Geldreich, D.; Kato, Z. Image segmentation using Markov random field model in fully parallel cellular network architectures. Real Time Imaging 2000, 6, 195–211. [Google Scholar]
- Anguelov, D.; Taskarf, B.; Chatalbashev, V.; Koller, D.; Gupta, D.; Heitz, G.; Ng, A. Discriminative Learning of Markov Random Fields for Segmentation of 3D Scan Data. Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Diego, CA, USA, 20– 25 June 2005; pp. 169–176.
- Weiss, U.; Biber, P. Plant detection and mapping for agricultural robots using a 3D LIDAR sensor. Robot. Auton. Syst. 2011, 59, 265–273. [Google Scholar]
- Golovinskiy, A.; Funkhouser, T. Min-Cut Based Segmentation of Point Clouds. Proceedings of the IEEE 12th International Conference on Computer Vision Workshops (ICCV Workshops), Kyoto, Japan, 27 September– 4 October 2009; pp. 39–46.
- Lalonde, J.-F.; Vandapel, N.; Hebert, M. Natural terrain classification using three-dimensional ladar data for ground robot mobility. J. Field Robot. 2006, 3, 839–861. [Google Scholar]
- Huber, D.; Akinci, B.; Oliver, A.A.; Anil, E.; Okorn, B.E.; Xiong, X.H. Methods for Automatically Modeling and Representing As-Built Building Information Models. Proceedings of the NSF CMMI Research Innovation Conference, Atlanta, GA, USA, 4–7 January 2011.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Truth/Inferred | ||
|---|---|---|
| ground | 67977 | 1611 |
| non – ground | 2580 | 58904 |
| Truth/Inferred | ||
|---|---|---|
| tree | 9918 | 3026 |
| building | 2828 | 10235 |
| Truth/Inferred | ||
|---|---|---|
| tree | 11983 | 3106 |
| building | 1749 | 9847 |
| Truth/Inferred | ||
|---|---|---|
| tree | 11536 | 905 |
| building | 1238 | 14652 |
| Truth/Inferred | ||
|---|---|---|
| tree | 17196 | 33 |
| building | 340 | 17771 |
© 2012 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Song, W.; Cho, K.; Um, K.; Won, C.S.; Sim, S. Complete Scene Recovery and Terrain Classification in Textured Terrain Meshes. Sensors 2012, 12, 11221-11237. https://doi.org/10.3390/s120811221
Song W, Cho K, Um K, Won CS, Sim S. Complete Scene Recovery and Terrain Classification in Textured Terrain Meshes. Sensors. 2012; 12(8):11221-11237. https://doi.org/10.3390/s120811221
Chicago/Turabian StyleSong, Wei, Kyungeun Cho, Kyhyun Um, Chee Sun Won, and Sungdae Sim. 2012. "Complete Scene Recovery and Terrain Classification in Textured Terrain Meshes" Sensors 12, no. 8: 11221-11237. https://doi.org/10.3390/s120811221