A Celestial Assisted INS Initialization Method for Lunar Explorers

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
: The second and third phases of the Chinese Lunar Exploration Program (CLEP) are planning to achieve Moon landing, surface exploration and automated sample return. In these missions, the inertial navigation system (INS) and celestial navigation system (CNS) are two indispensable autonomous navigation systems which can compensate for limitations in the ground based navigation system. The accurate initialization of the INS and the precise calibration of the CNS are needed in order to achieve high navigation accuracy. Neither the INS nor the CNS can solve the above problems using the ground controllers or by themselves on the lunar surface. However, since they are complementary to each other, these problems can be solved by combining them together. A new celestial assisted INS initialization method is presented, in which the initial position and attitude of the explorer as well as the inertial sensors’ biases are estimated by aiding the INS with celestial measurements. Furthermore, the systematic error of the CNS is also corrected by the help of INS measurements. Simulations show that the maximum error in position is 300 m and in attitude 40″, which demonstrates this method is a promising and attractive scheme for explorers on the lunar surface.1. Introduction
The Moon is the only natural satellite of Earth. There is great potential to develop new technologies and to make use of the Moon’s valuable resources. Up to now, the Moon has been visited by the explorers of the Soviet Union (SU), the United States (US), the European Space Agency (ESA), Japan (JP), China (CHN) and India (IN). There are many lunar exploration programs currently happening or being planned.
China’s lunar exploration is a three-phase mission. In phases I and II, China launched its first and second lunar probes, Chang’e-1 and Chang’e-2, which have successfully finished their missions and obtained 3D images of the lunar surface. In the next few years of the phase II, an unmanned lander, which will carry a lunar rover for the exploration of the Moon’s surface, will softly land on the Moon. In phase III, a return vehicle will collect samples of lunar soil and carry them back to the Earth. In these upcoming missions to the Moon, explorers such as Rovers, Landers, Descenders and Ascenders will use INS and CNS for navigation to compensate for the limited capacity of ground tracking networks. The accuracy of INS and CNS mainly depends upon the accuracy with which these systems are initialized or calibrated, so the accurate initialization of the INS and the precise calibration of the CNS are needed.
The initialization of INS is the process of determining some initial values of the system, such as position, attitude, and sensors biases [1,2]. The calibration of CNS is the process of determining and correcting systematic error caused by sensors index error and alignment error [3]. The initialization of the INS and the calibration of the CNS are difficult problems on the lunar surface and cannot be accomplished by each one alone. However, because INS and CNS have complementary characteristics, their initialization and calibration can be accomplished by the combination of them [4].
A celestial assisted INS initialization method for explorers on the lunar surface is presented. An unscented Kalman filter is used for fusing information from various INS and CNS sensors. The initial position, attitude as well as biases of INS sensors are estimated effectively and the systematic error of CNS is corrected at the same time. The feasibility of this new method is validated using a ground test bed. Simulations show that the maximum error in position is 300 m and in attitude 40″. These results verify that this method is a promising and attractive scheme for lunar explorers.
This paper is systematized in five sections. After this introduction, the basic principle of INS and CNS is outlined in Section 2. Then the state model and measurement model of this celestial assisted INS initialization method is described in details in Section 3. Simulations in Section 4 demonstrate the performance and conclusions are drawn in Section 5.
3. Celestial Assisted INS Initialization Method
The traditional INS initialization method on the earth based on Kalman filter usually uses the INS error model as the state model [18,19]. The state variables of this model include two horizontal position errors, two horizontal velocity errors, three attitude error angles, three gyro biases and three accelerometer biases. Measurements include velocity error, Earth rotation rate, etc. The observability of this method is low and many state variables are not observable. Because CNS can provide refined position and attitude information, CNS aided INS initialization not only improves the observability, but also improves the initialization accuracy. To make system models simple, two horizontal positions, three attitude angles, three gyro biases, three accelerometer biases are used as state variables. In addition to these eleven variables, the systematic error in the star altitude measurement is also added to the state variables.
3.1. State Model
Because the lunar explorer is stationary, the state model in the Moon fixed frame is defined as:
3.2. Measurement Model
To make all state variables observable, the star altitude, star orientation and outputs of IMU are chosen as the measurement variables.
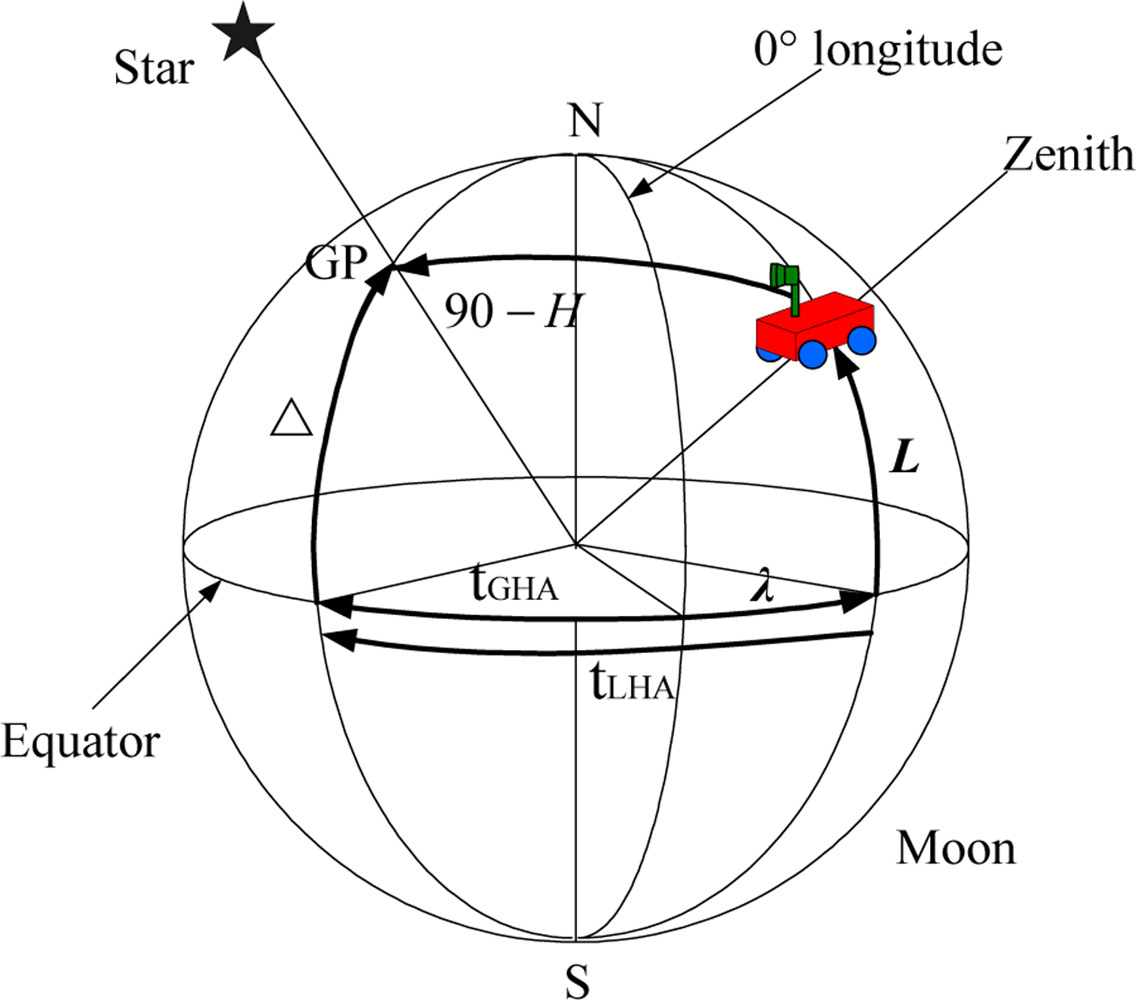
Star altitude. From Equation (3), the measurement equation of star height H is obtained as:
where λe, ϕe are the pre-estimated longitude and latitude of lunar probe respectively, which is provided by ground tracking network. The error between λe, ϕe and the true value is about 1,000 m. α is the systematic error in the star altitude measurement as mentioned above and vH is measurement noise.Star direction vector. The observation information measured by star sensor also provides an indication of the lunar explorer’s attitude information. Given the 2-D star centroid from the threshold star image, a 3-D star-direction unit vector sb = [xb,yb,zb]T in the explorer body frame can be computed [21]. At the same time, the vector direction of star in the Moon fixed frame can be obtained from the Astronomical Almanac, given as follows: sm = [xm,ym,zm]T = [cosΔcos tLHA, cosΔsin tLHA, sinΔ]T The relation between sb and sm is:
where is the transformation matrix from the navigation frame to the Moon fixed frame:Output of accelerometers:
where fb is the output of accelerometers, gt is gravity vector, gΔ is the vector of accelerometers biases.Output of gyros:
where wb is the output of gyros, wt is the lunar rotation rate, wΔ is the vector of gyros biases. Using Equations (5–9), we can obtain the following measurement model of this celestial assisted INS initialization method:
3.3. UKF Method
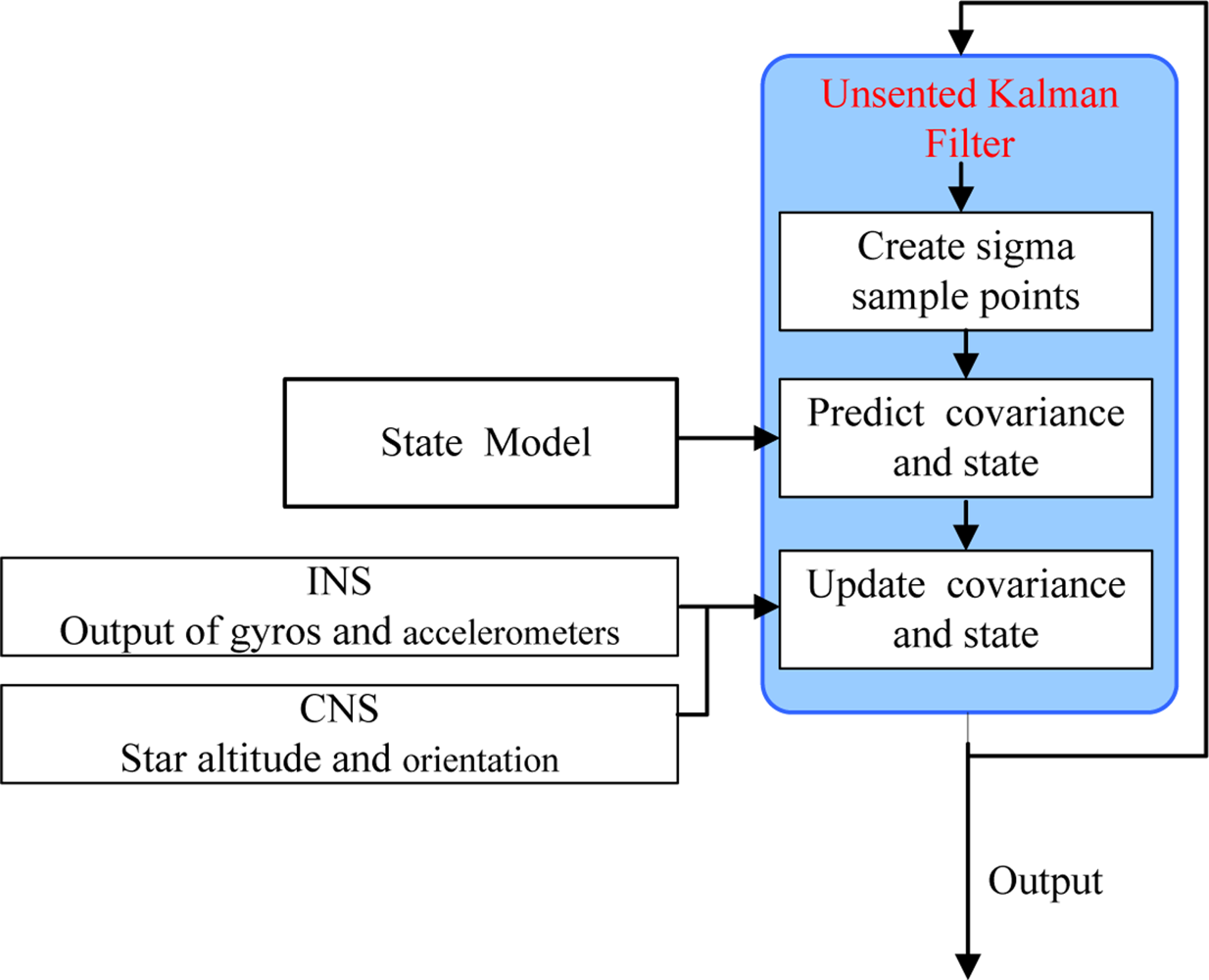
The Kalman filter (KF), which is optimal for application to linear and Gaussian systems, is often used in the INS initialization [22]. However, in this celestial assisted INS initialization system, the measurement model is nonlinear. Since UKF has lower estimation errors than the Extended Kalman filter (EKF) for nonlinear systems and it also avoids the derivation of Jacobian matrices, UKF is used in this study [23,24]. The block diagram of the celestial assisted INS initialization method based on UKF is shown in Figure 3.
4. Results and Discussion
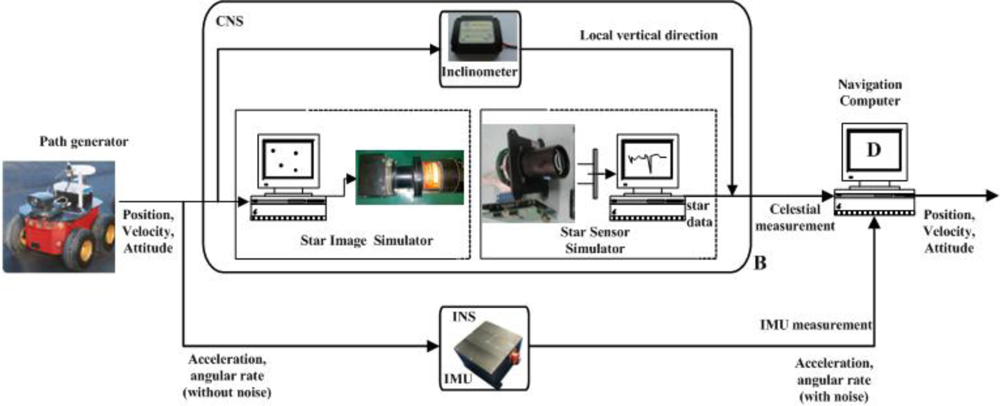
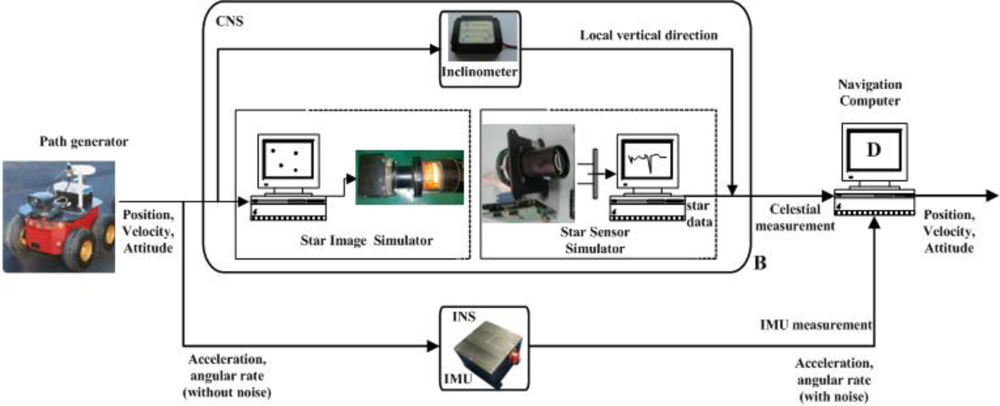
This section presents simulations of this celestial assisted INS initialization method. All simulation data comes from the lunar explorer INS/CNS simulation system shown in Figure 4. This system is composed of a lunar explorer simulator, a real-world model characterizing both navigation environment and on-board sensors and a navigation computer. A pioneer-3A robot is used as the lunar explorer simulator to evaluate navigation performance. The INS is composed of an IMU, which is composed of three optical fiber gyroscopes and three quartz pendulum accelerometers. The IMU is rigidly mounted parallel to the body axes of the explorer. The bias of each gyroscope is 0.05°/h and the bias of each accelerometer is 10 μg. The update rates of both sensors are 100 Hz. The CNS consists of a star image simulator, a star sensor and an inclinometer. The star image simulator is used to produce the simulation star image according to the explorer’s position, attitude, the Astronomical Almanac and astronomy software, etc. The accuracy of star sensor is 3″ (1σ) and its update rate is 5 Hz. The inclinometer used is a NS–45/P2 dual-axis inclinometer. The precision of the inclinometer is 0.03° and its update rate is 20 Hz.
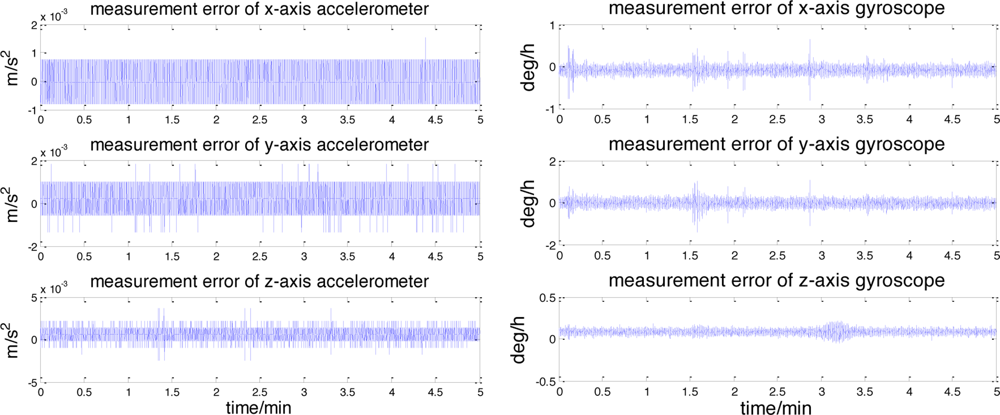
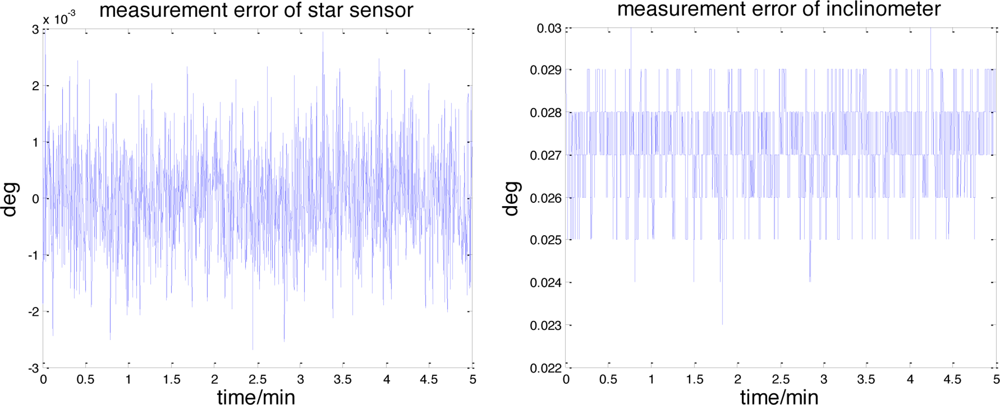
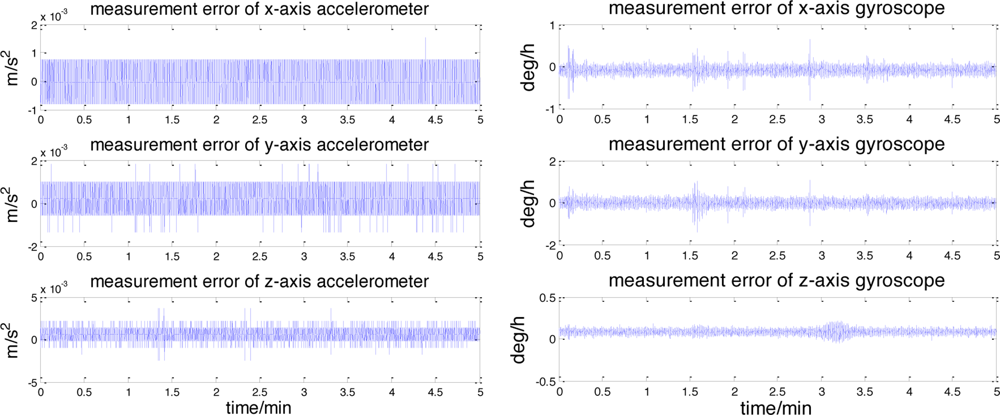
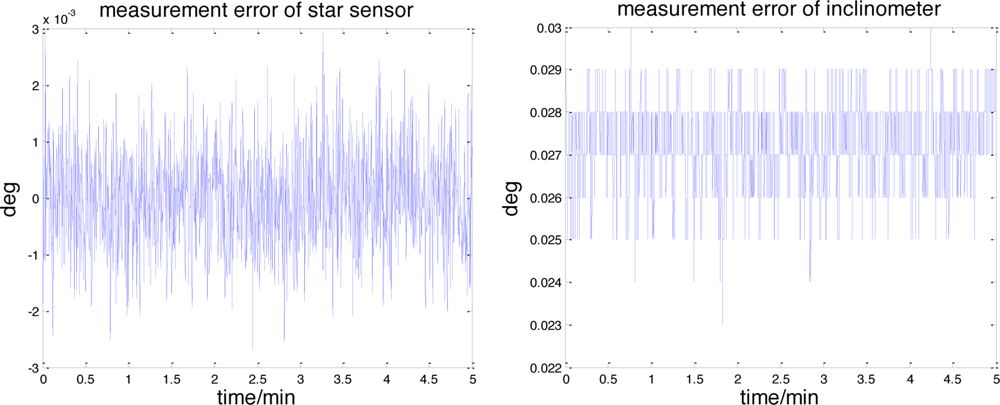
In simulations, measurement errors are separated from the real data and used to create simulation measurements on the lunar surface. The error characteristics of the accelerometers and gyroscopes are shown in Figure 5. It can be seen that each accelerometer measurement error consists of a constant bias and the random noise, which can also be observed in the gyroscopes. The raw measurement errors of the star sensor and the inclinometer are depicted in Figure 6.
Similar to Figure 5, the dominant components of these errors also consists of the constant bias and the random noise. The landsite of USA Surveyor III (2°56′N, 336°40′E) is chosen as the initial position. The lunar rover stays still, its initial yaw, roll and pitch angles are 20°, 0° and 0°. The entire simulation time is 5 min.
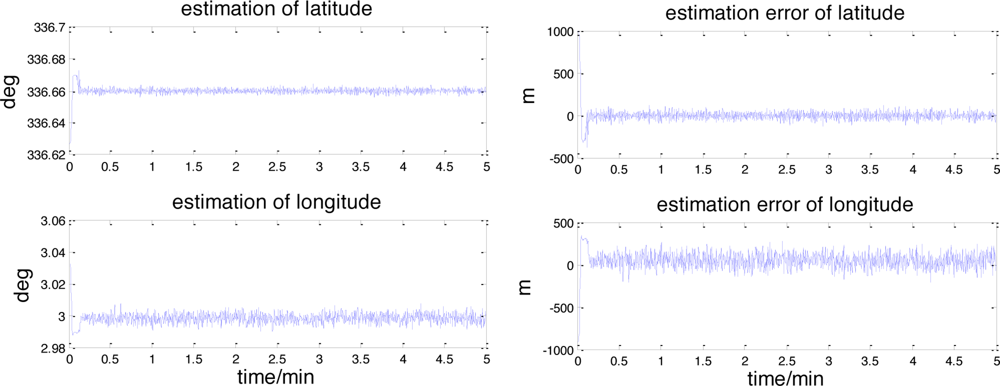
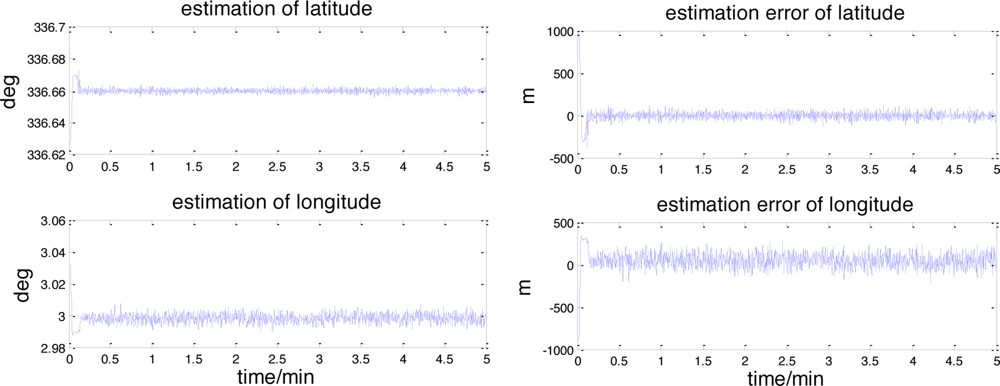
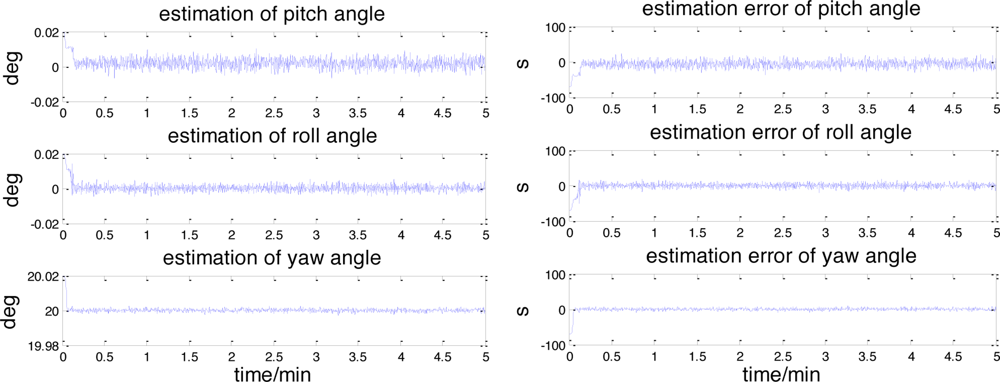
Figure 7 and Figure 8 shows the results of this celestial assisted INS initialization method. As indicated in these figures, the UKF filter converges rapidly within 10 seconds from the start of the run. After the filter convergence period, the estimated values of latitude and longitude converge to 336.66° and 2.9984° quickly, which are very close to the true value 336.6585° and 3.0023°. The root mean square (RMS) estimation errors of latitude and longitude are 39.9239 m and 90.4737 m. The maximum estimation errors of latitude and longitude are 131.8504 m and 276.1276 m.
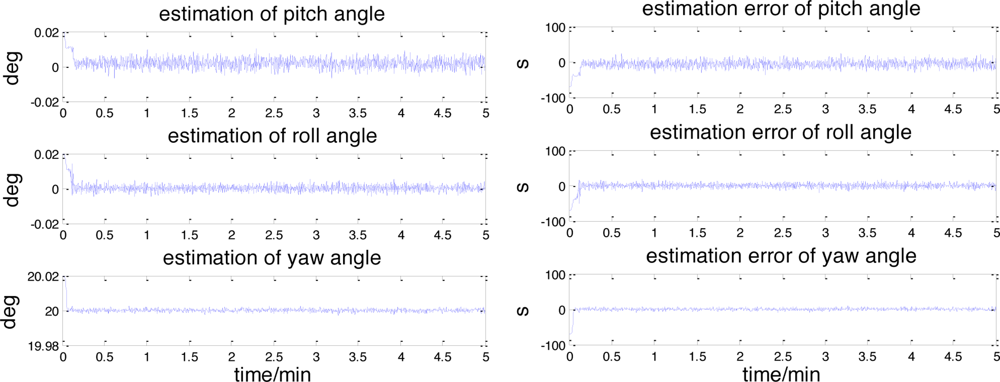
The estimated attitude also converges to the real attitude quickly. The root mean square (RMS) attitude errors are 11.3343″, 5.9231″ and 2.8087″ respectively in yaw, roll and pitch angle. The maximum estimation errors of these angles are 36.3830″, 19.7239″ and 10.2493″. From these results, it can be concluded that this celestial assisted INS initialization method can enhance the position and attitude estimation accuracy. The maximum error in position is 300 m and in attitude 40″, which is much better than that sent by ground stations.
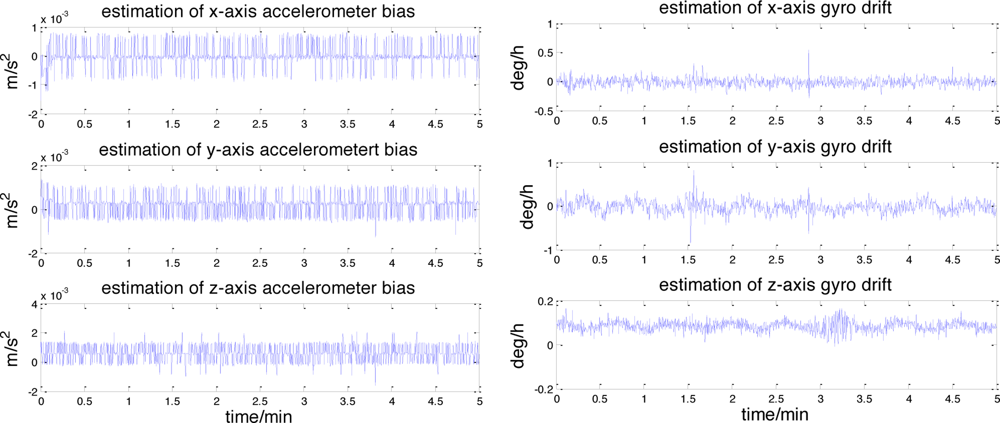
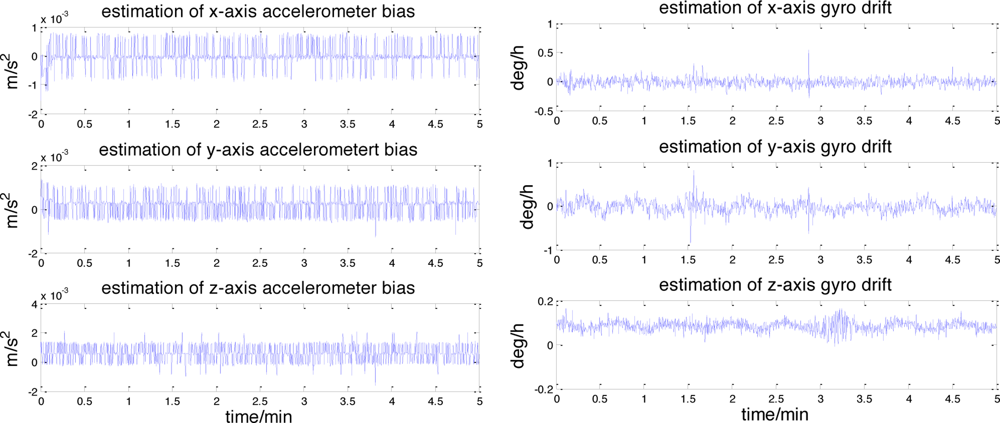
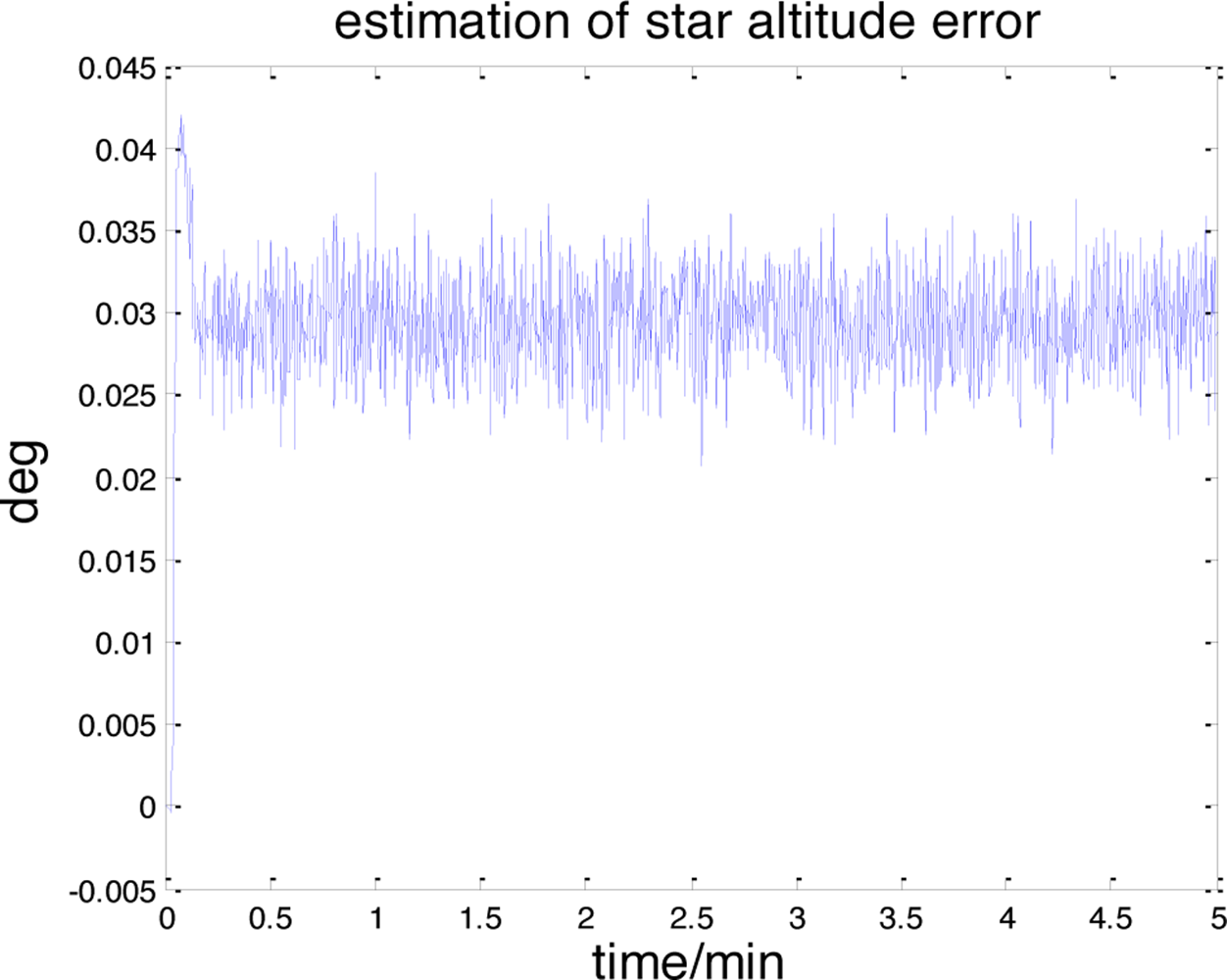
Figure 9 illustrates the accelerometer and gyroscope errors estimated by this celestial assisted INS initialization method. These results are coherent with the true measurement errors, as evidenced in Figure 5. The systematic error estimation result of star altitude in the CNS is presented in Figure 10. Compared with Figure 6, we can see that the estimation is consistent with the measurement error caused by the star sensor and the inclinometer. From these figures, it is clear that the celestial assisted INS initialization method developed in this paper is able to accurately estimate the accelerometer and gyroscope errors. Furthermore, it is also can estimate the systematic error in the CNS effectively.
5. Conclusions
In this study, a new celestial assisted INS initialization method for lunar explorers, which could solve the INS initialization and CNS calibration problems at the same time, is presented. To make the state model simple and observable, position, attitude, and main error resources are used as state variables. All original information provided by the sensors of the INS and the CNS is used as measurements. An unscented Kalman filter is used to deal with these measurements and estimate the states. The method is tested using a ground simulation system. The estimation error of initial position is within 300 m and the estimation error of initial attitude is within 40″. Both the inertial sensors’ biases in the INS and the systematic error in the CNS are estimated effectively. Results allow the conclusion that this celestial assisted INS initialization method is a promising method for the high accuracy initialization of a lunar explorer. It should be noted that the proposed approach is general and may be used on any kind of lunar explorers on the lunar surface, such as lunar rovers, landers and ascenders, with an equivalent set of sensors. Future directions of research include applications (extensions) of this method to cases where the INS and CNS are fused with other navigation sensors (e.g., vision sensors, beacons etc.)
Acknowledgments
The work described in this paper was supported by National Natural Science Foundation of China (60874095) and Hi-tech Research and Development Program of China. The author would like to thank all members of the Inertial Technology Key Laboratory, for their useful comments regarding this work effort.
References
- Grewal, MS; Weill, LR; Angus, PA. Global Positioning Systems, Inertial Navigation, and Integration, 2nd Ed ed; John Wiley & Sons: Hoboken, NJ, USA, 2007. [Google Scholar]
- Jekeli, C. Inertial Navigation Systems with Geodetic Application; Walter de Gruyter: Berlin, Germany, 2000. [Google Scholar]
- Ning, XL; Fang, JC. A new autonomous celestial navigation method for the lunar rover. Rob. Autonomous Syst 2009, 57, 48–54. [Google Scholar]
- Goldstein, MS; Greenwood, IA; Kuritsky, MM; Lerman, H; McCarthy, JE; Shanahan, T; Silver, M; Simpson, JH. Inertial navigation. Proc. IEEE 1983, 71, 1156–1176. [Google Scholar]
- Rogers, RM. Applied Mathematics in Integrated Navigation Systems, 3rd Ed ed; AIAA: Reston, VA, USA, 2007. [Google Scholar]
- Shin, E-H. Accuracy Improvement of Low Cost INS/GPS for Land Application. University of Calgary: Calgary, AB, Canada, 2001. [Google Scholar]
- Bar-Itzhack, IY; Goshen-Meskin, D. Identity between INS position and velocity error equations in the true frame. J. Guidance Control Dyn 1988, 6, 590–592. [Google Scholar]
- Rogers, RM. Comparison of Inertial Navigation System Error Models in Application to IMU Transfer Alignment. Proceedings of the AIAA Guidance, Navigation and Control Conference, New Orleans, IA, USA, 11–13 August 1997; pp. 686–695.
- Chung, DY; Lee, JG; Park, CG; Park, HW. Strapdown INS error model for multiposition alignment. IEEE Trans. Aerosp. Electron. Syst 1996, 4, 1362–1366. [Google Scholar]
- Dmitriyev, SP; Stepanov, OA; Shepel, SV. Nonlinear filtering methods application in INS alignment. IEEE Trans. Aerosp. Electron. Syst 1997, 1, 260–271. [Google Scholar]
- Shaolin, L; Ling, X; Jiabin, C. New techniques for initial alignment of strapdown inertial navigation system. J. Franklin Inst 2009, 10, 1021–1037. [Google Scholar]
- Goshen-Meskin, D; Bar-Itzhack, IY. Observability analysis of piece-wise constant system, Part II: Application to inertial navigation in-flight alignment. IEEE Trans. Aerosp. Electron. Syst 1992, 4, 1068–1075. [Google Scholar]
- Batista, P; Silvestre, C; Oliveira, P. On the observability of linear motion quantities in navigation systems. Syst. Control Lett 2011, 2, 101–110. [Google Scholar]
- Fang, JC; Wang, DJ. A fast initial alignment method for strapdown inertial navigation system on stationary base. IEEE Trans. Aerosp. Electron. Syst 1996, 32, 1501–1504. [Google Scholar]
- Zhang, CB; Tian, WF; Jin, ZH. A novel method improving the alignment accuracy of a strapdown inertial navigation system on a stationary base. Meas. Sci. Technol 2004, 15, 765–769. [Google Scholar]
- Trautner, R; Bello Mora, M; Hechler, M; Koschny, D. A New Celestial Navigation Method for Mars Landers. Proceedings of the 35th Lunar and Planetary Science Conference, League City, TX, USA, 15–19 March 2004.
- Thein, ML. Celestial Navigation (CelNav): Lunar Surface Navigation. Proceedings of the 2008 AIAA/AAS Astrodynamics Specialist Congress and Exposition, Honolulu, HI, USA, August 2008; pp. 1–19.
- Lee, H. An integration of GPS with INS sensors for precise long-baseline kinematic positioning. Sensors 2010, 10, 9424–9438. [Google Scholar]
- Acharya, A; Sadhu, S; Ghoshal, TK. Improving Self-Alignment of Strapdown INS Using Measurement Augmentation. Proceedings of the 12th International Conference on Information Fusion, Seattle, WA, USA, 6–9 July 2009.
- Samer, SS; Kristjan, TG. Automatic Alignment and Calibration of an Inertial Navigation System. Proceedings of the IEEE Position Location and Navigation Symposium (PLANS), Las Vegas, NV, USA, 11–15 April 1994; pp. 845–852.
- Veth, M; Raquet, J. Alignment and Calibration of Optical and Inertial Sensors Using Stellar Observations. Proceedings of the 18th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2005), Long Beach, CA, USA, September 2005.
- Neda, P; Farid, G. Integration of a multi-camera vision system and strapdown inertial navigation system (SDINS) with a modified kalman filter. Sensors 2010, 10, 5378–5394. [Google Scholar]
- Julier, SJ; Uhlmann, JK. A New Extension of the Kalman Filter to Nonlinear Systems. Proceedings of the 11th International Symposium on Aerospace/Defense Sensing, Simulation and Controls, Multi Sensor Fusion, Tracking and Resource Management, Orlando, FL, USA; 1997. [Google Scholar]
- Julier, SJ; Uhlmann, JK; Durrant-Whyte, HF. A new method for the non linear transformation of means and covariances in filters and estimators. IEEE Trans. Autom. Control 2000, 45, 477–482. [Google Scholar]



© 2011 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Ning, X.; Wang, L.; Wu, W.; Fang, J. A Celestial Assisted INS Initialization Method for Lunar Explorers. Sensors 2011, 11, 6991-7003. https://doi.org/10.3390/s110706991
Ning X, Wang L, Wu W, Fang J. A Celestial Assisted INS Initialization Method for Lunar Explorers. Sensors. 2011; 11(7):6991-7003. https://doi.org/10.3390/s110706991
Chicago/Turabian StyleNing, Xiaolin, Longhua Wang, Weiren Wu, and Jiancheng Fang. 2011. "A Celestial Assisted INS Initialization Method for Lunar Explorers" Sensors 11, no. 7: 6991-7003. https://doi.org/10.3390/s110706991