Micro Cantilever Movement Detection with an Amorphous Silicon Array of Position Sensitive Detectors


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
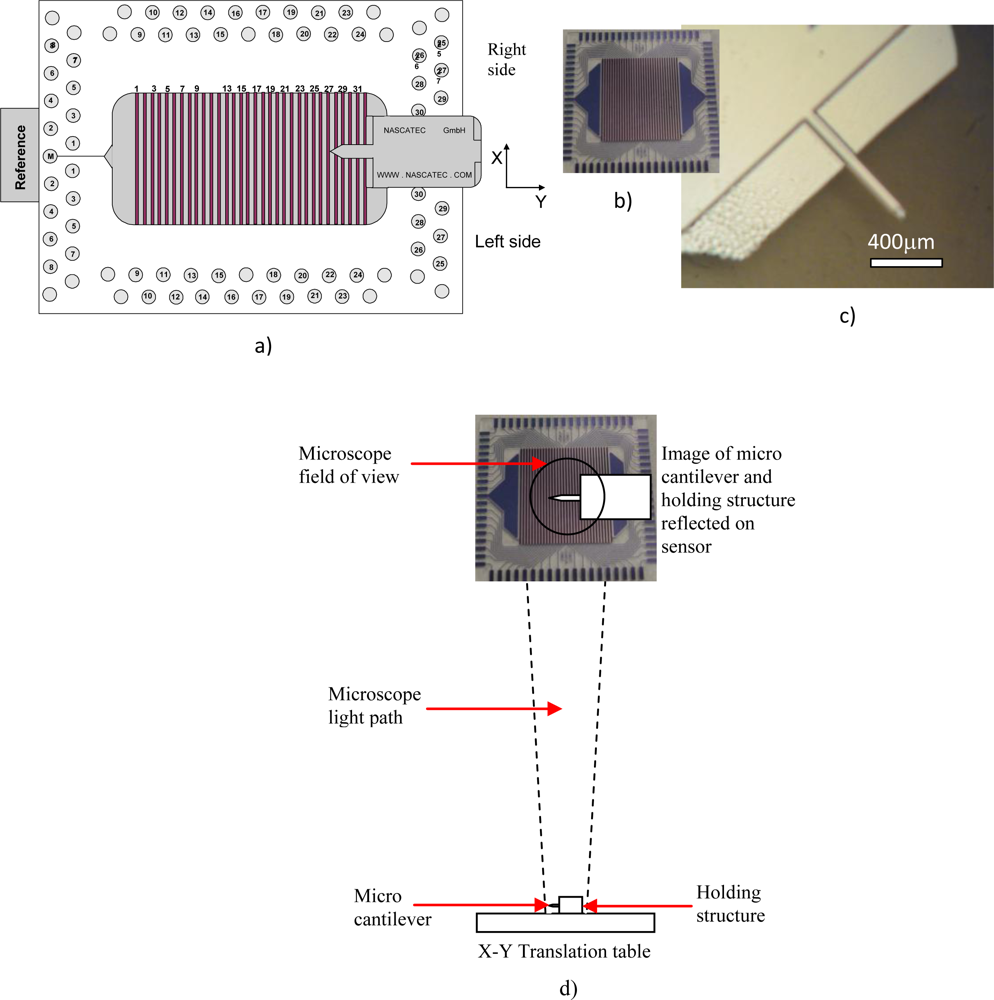
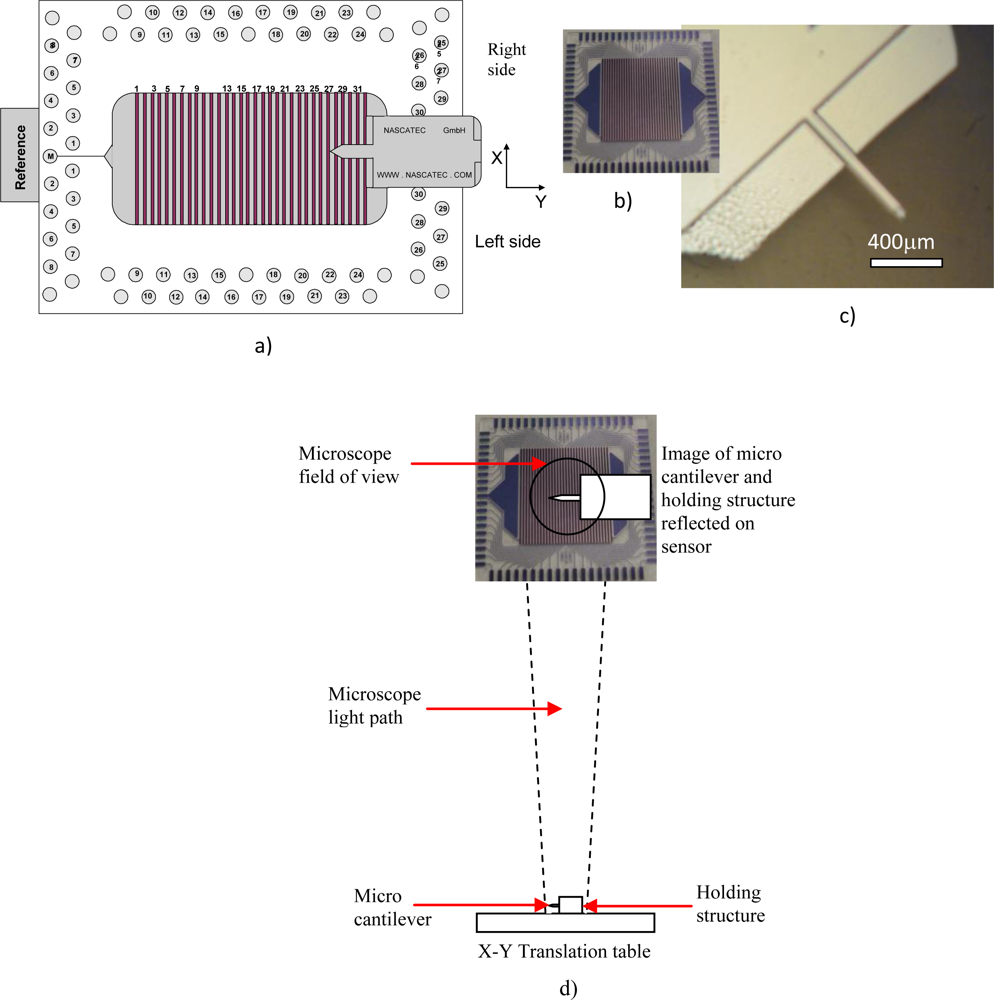
2. Working Principles of a Position Sensitive Detector Array
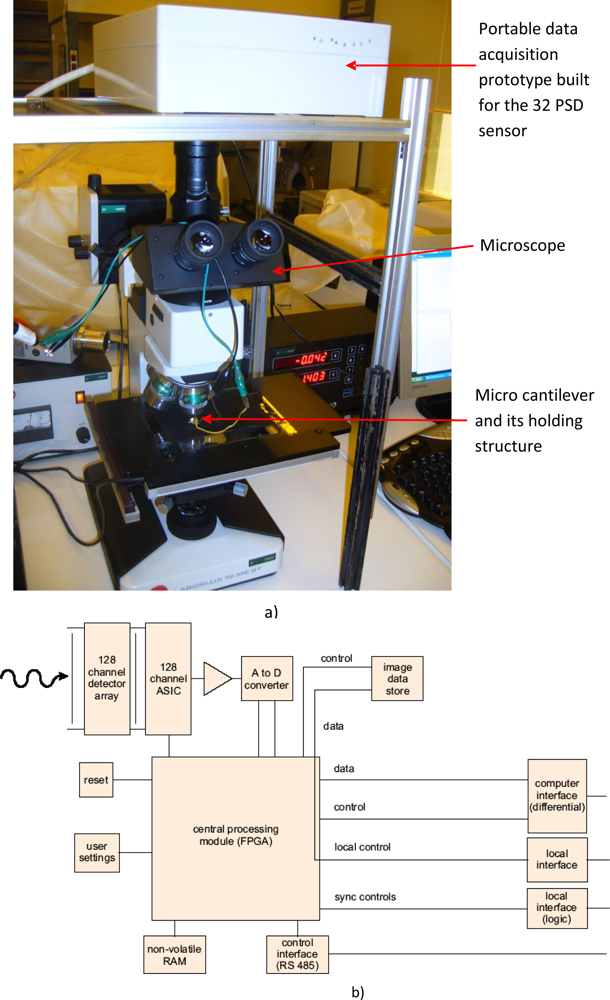
3. Experimental Setup
4. Electronics Module
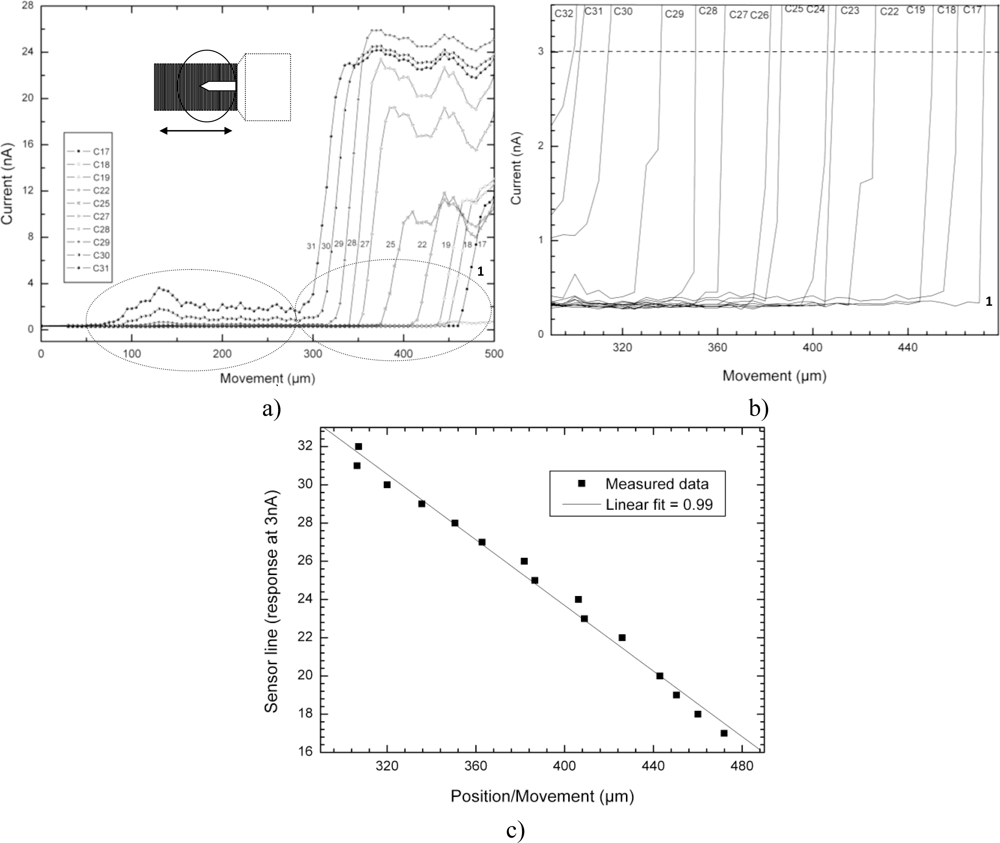
5. Results and Discussion
6. Conclusions
Acknowledgments
References
- Herman, B; Lemasters, JJ. Optical Microscopy: Emerging Methods and Applications; Academic Press: New York, NY, USA, 1993. [Google Scholar]
- Inoué, S; Spring, KR. Video Microscopy: The Fundamentals, 2nd ed; Plenum Press: New York, NY, USA, 1997. [Google Scholar]
- Bradbury, S; Bracegirdle, B. Introduction to Light Microscopy; BIOS Scientific Publishers Ltd: Oxford, UK, 1998. [Google Scholar]
- Slayter, EM; Slayter, HS. Light and Electron Microscopy; Cambridge University Press: Cambridge, UK, 1992. [Google Scholar]
- Pluta, M. Advanced Light Microscopy (3 volumes); Elsevier: New York, NY, USA, 1989. [Google Scholar]
- Wit, PJ; Noordmans, J; Busscher, HJ. Tracking of colloidal particles using microscopic image sequence analysis. Application to particulate microelectrophoresis and particle deposition. Colloid. Surf. A 1997, 125, 85–92. [Google Scholar]
- Visscher, K; Block, SM. Versatile optical traps with feedback control, methods in enzymology. Method. Enzymol 1998, 298, 460–489. [Google Scholar]
- Wallmark, J. A new semiconductor photocell using lateral photoeffect. Proc. IRE 1957, 45, 474–483. [Google Scholar]
- Kahmen, H; Roic, M. A new generation of measurement robots for object reconstruction without targeting. In Optical 3d Measurements III; Grün, A, Kahemen, H, Eds.; Herbert Wichmann Verlag: Heidelberg, Germany, 1995; pp. 251–262. [Google Scholar]
- Martins, R; Fortunato, E. Thin Film Position Sensitive Detectors: From 1D to 3D Applications In the Technology and Applications of Amorphous Silicon; Street, R, Ed.; Springer-Verlag Inc.: New York, NY, USA, 2000; pp. 342–403. [Google Scholar]
- Fortunato, E; Lavareda, G; Vieira, M; Martins, R. Thin film position sensitive detector based on amorphous silicon p-i-n diode. Rev. Sci. Instrum 1994, 65, 3784–3786. [Google Scholar]
- Martins, R; Fortunato, E. Lateral photoeffect in large area one-dimensional thin-film position-sensitive detectors based in a-Si:H P-I-N devices. Rev. Sci. Instrum 1995, 66, 2927–2934. [Google Scholar]
- Fortunato, E; Soares, F; Teodoro, P; Guimarães, N; Mendes, M; Águas, H; Silva, V; Martins, R. Characterisitcs of a linear array of a-Si:H thin film position sensitive detector. Thin Solid Films 1999, 337, 222. [Google Scholar]
- Fortunato, E; Pereira, L; Águas, H; Ferreira, I; Martins, R. Flexible a-Si:H position sensitive detectors. Proc. IEEE 2005, 93, 1281–1286. [Google Scholar]
- Martins, R; Raniero, L; Pereira, L; Águas, H; Pereira, S; Silva, L; Gonçalves, A; Ferreira, I; Fortunato, E. Nanostructured silicon and its application to solar cells, position sensors and thin film transistors. Phil. Mag 2009, 89, 2699–2721. [Google Scholar]
- Águas, H; Pereira, L; Costa, D; Fortunato, E; Martins, R. Linearity and sensitivity of MIS position sensitive detectors. J. Mater. Sci 2005, 40, 1377–1381. [Google Scholar]
- Contreras, J; Baptista, C; Ferreira, I; Costa, D; Pereira, S; Águas, H; Fortunato, E; Martins, R; Wierzbicki, R; Heerlein, H. Amorphous silicon position sensitive detectors applied to micropositioning. J Non-Cryst Solids. 2006, 352, pp. 1792–1796. http://www.sciencedirect.com/science/journal/00223093.

© 2010 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Contreras, J.; Costa, D.; Pereira, S.; Fortunato, E.; Martins, R.; Wierzbicki, R.; Heerlein, H.; Ferreira, I. Micro Cantilever Movement Detection with an Amorphous Silicon Array of Position Sensitive Detectors. Sensors 2010, 10, 8173-8184. https://doi.org/10.3390/s100908173
Contreras J, Costa D, Pereira S, Fortunato E, Martins R, Wierzbicki R, Heerlein H, Ferreira I. Micro Cantilever Movement Detection with an Amorphous Silicon Array of Position Sensitive Detectors. Sensors. 2010; 10(9):8173-8184. https://doi.org/10.3390/s100908173
Chicago/Turabian StyleContreras, Javier, Daniel Costa, Sonia Pereira, Elvira Fortunato, Rodrigo Martins, Rafal Wierzbicki, Holger Heerlein, and Isabel Ferreira. 2010. "Micro Cantilever Movement Detection with an Amorphous Silicon Array of Position Sensitive Detectors" Sensors 10, no. 9: 8173-8184. https://doi.org/10.3390/s100908173