CENet: A Cabinet Environmental Sensing Network

Abstract
:1. Introduction
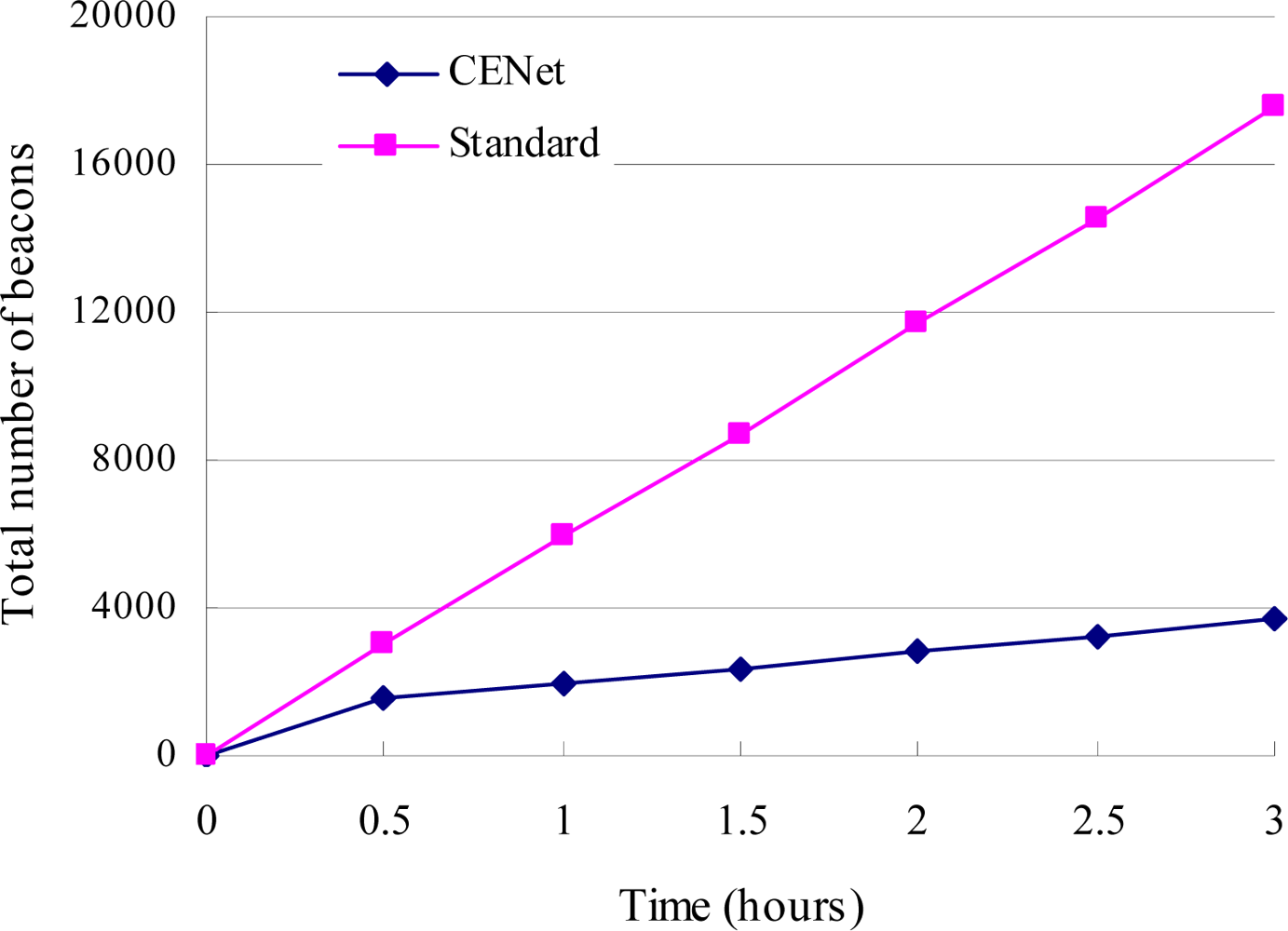
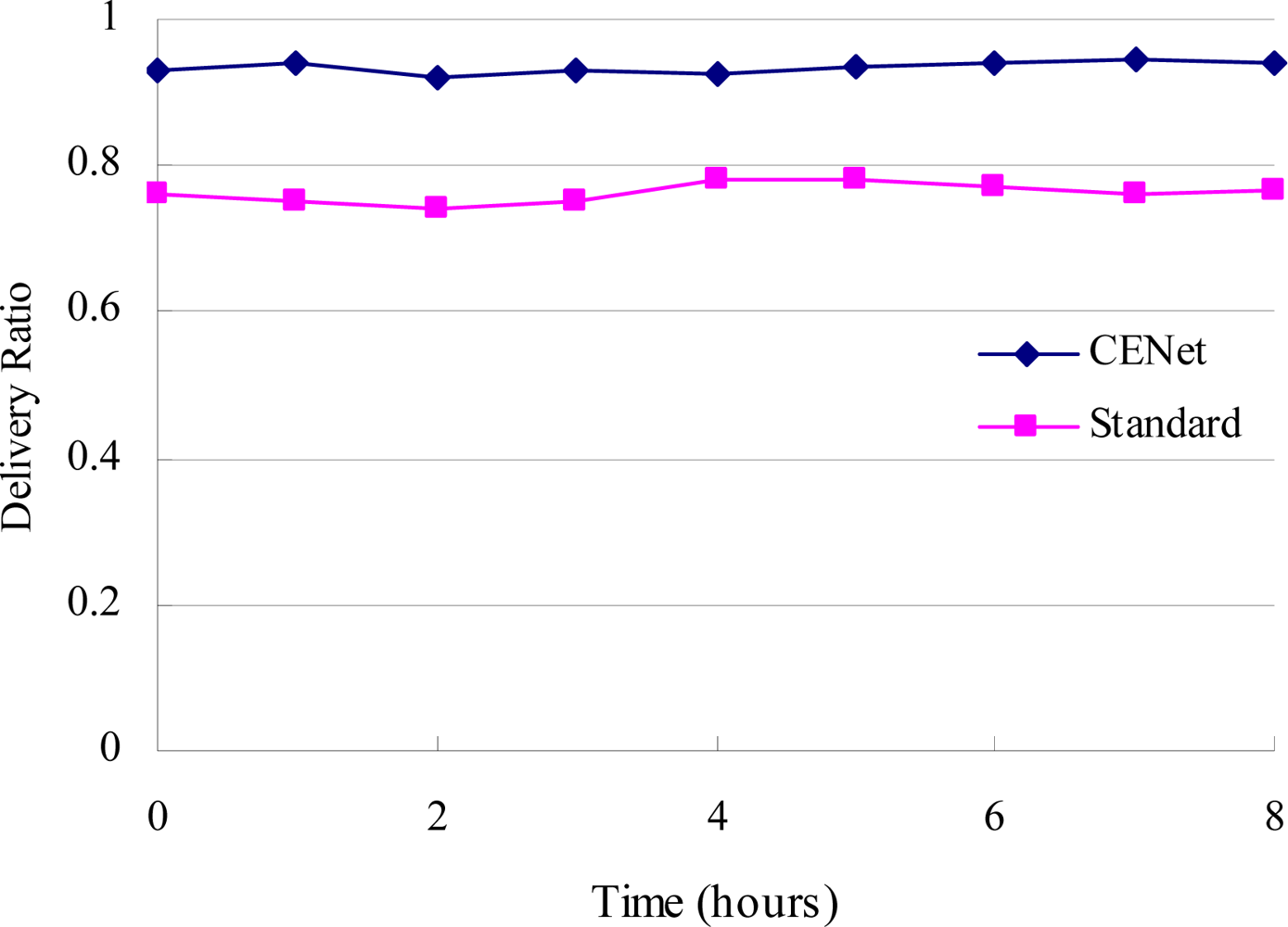
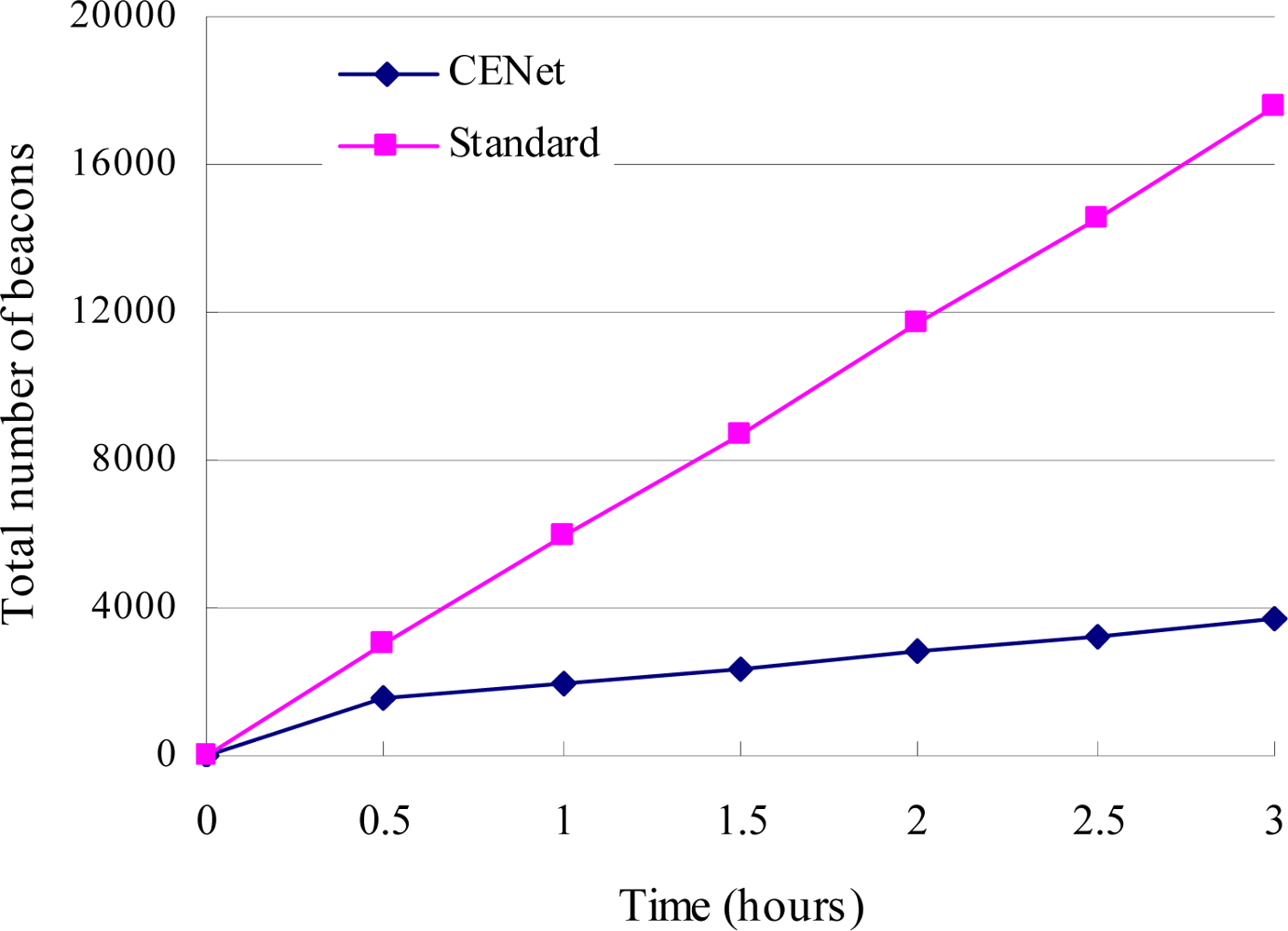
- CENet implements a data-aided routing protocol. Instead of using periodic beaconing to estimate link quality and maintain network routing topology, CENet uses transmitted data to continuously estimate link quality and its routing maintenance is triggered when poor link quality is detected. Therefore the energy dissipation due to beacons can be diminished. Compared to MintRoute’s fixed 1 minute beacon interval [5], CENet sends 85% fewer beacons. It can also achieve a packets delivery ratio of more than 93%.
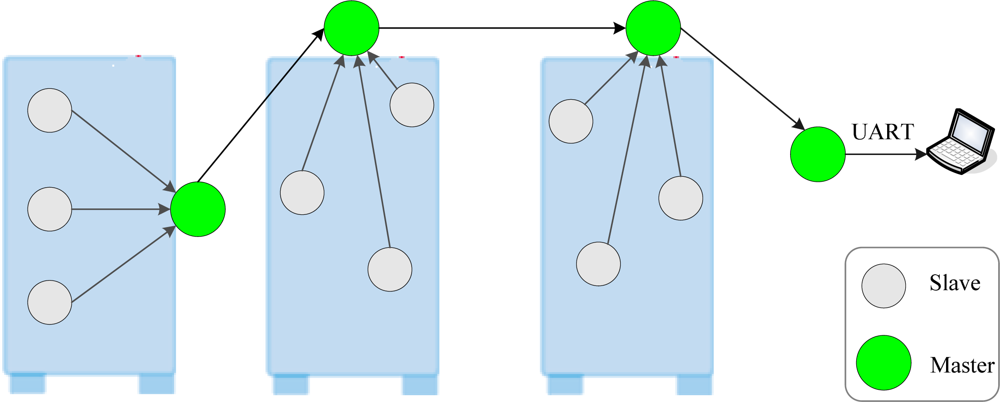
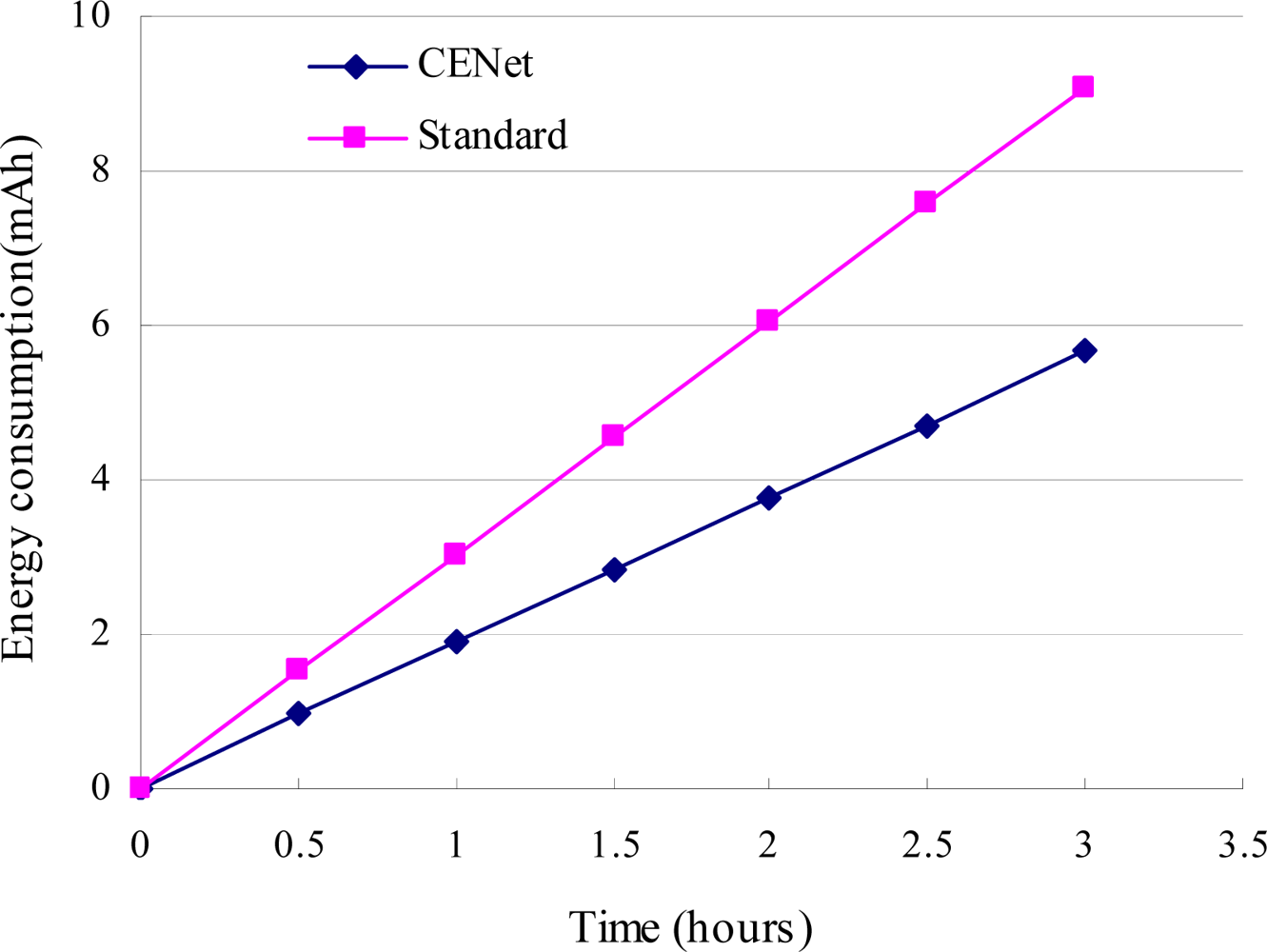
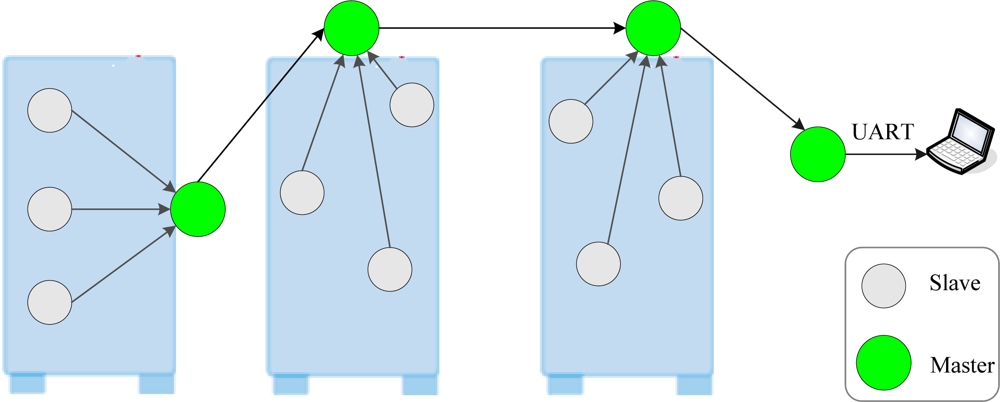
- CENet contains two kinds of nodes: master nodes and slave nodes. In order to prolong the network life time, we propose a scheduling scheme based on B-MAC [6] for slave nodes, which reduces unnecessary message snooping and channel listening, i.e., a slave node keeps sleeping until it is time for sensing the environment or it has data for transmission. Using CENet, slave nodes consume about 65% less energy compared to using B-MAC, where the sample interval is 5 minutes.
2. Architecture
3. Routing
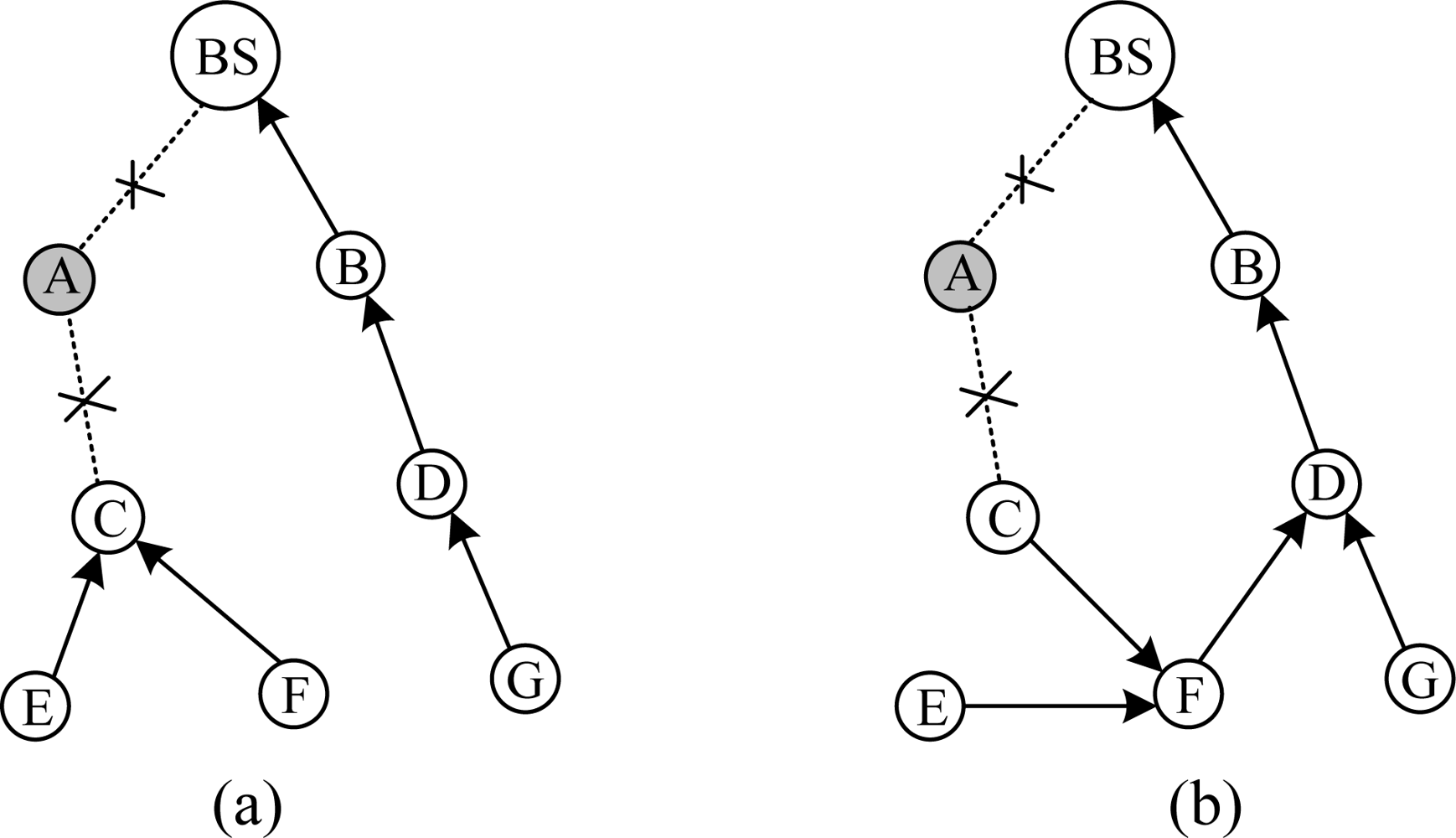
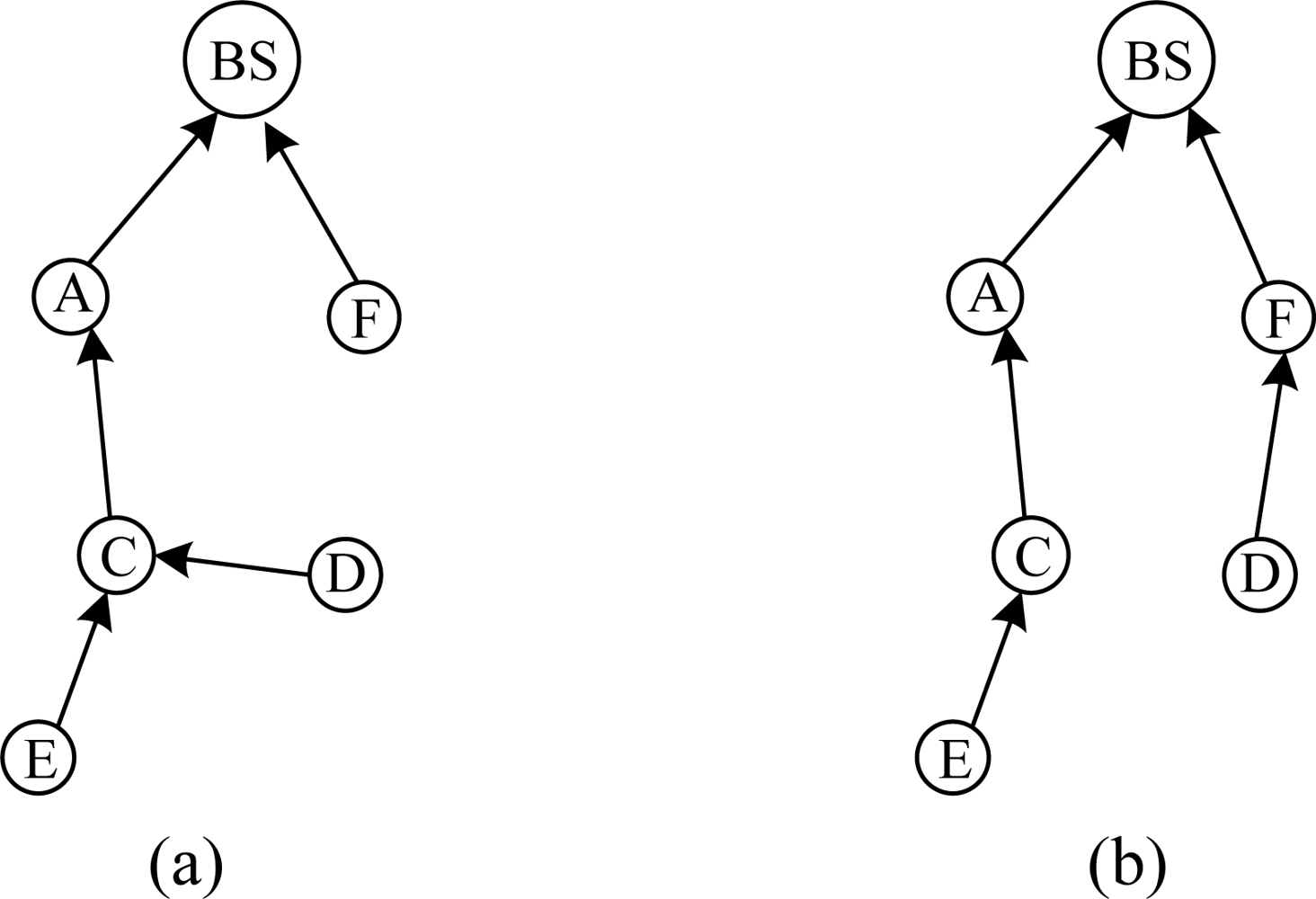
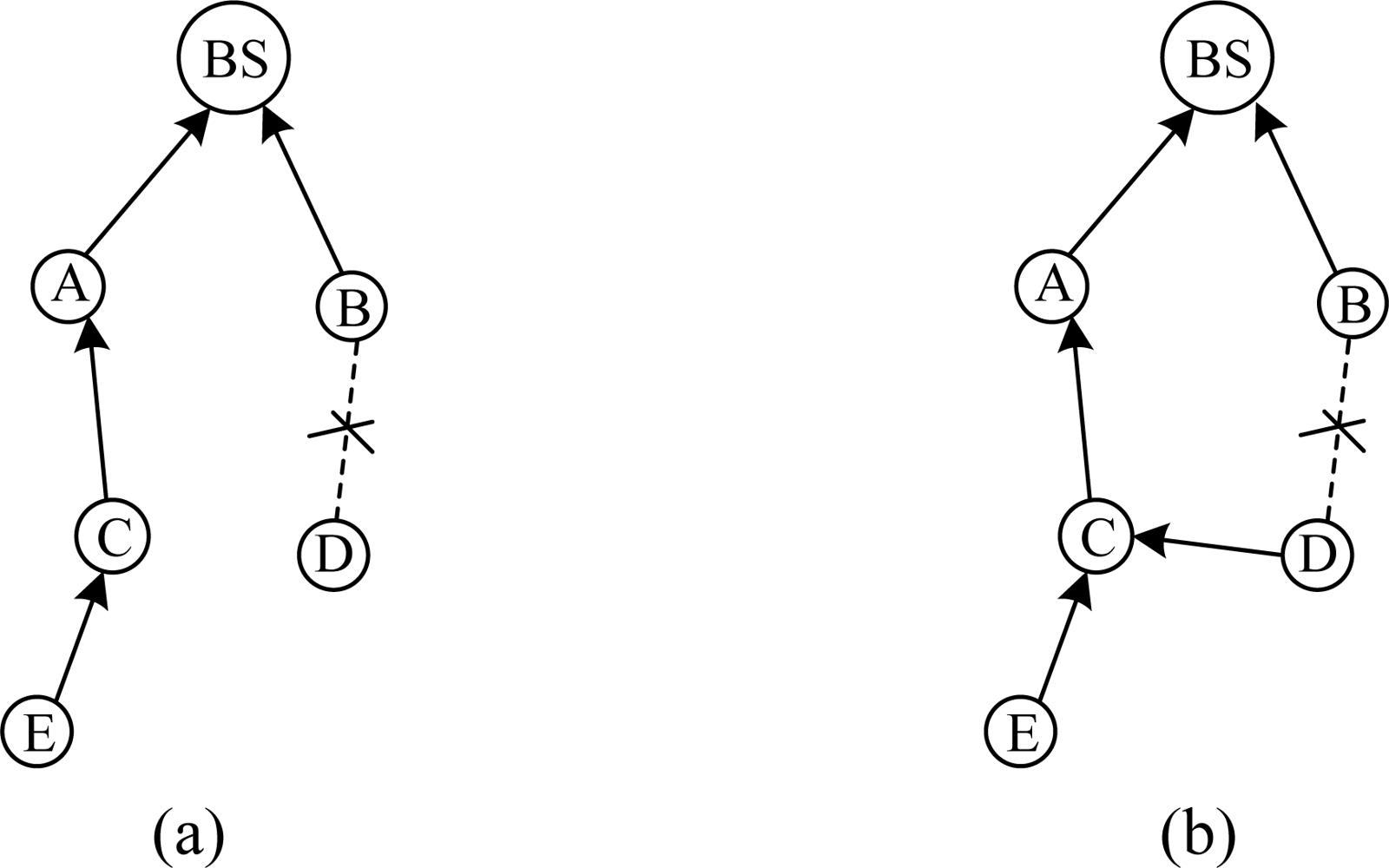
- Periodic beaconing has a slow response to network variation. The link quality is a statistical result, so it must to be estimated after many beacon exchanges for more accuracy. In some situations, these beacon exchanges should be finished in a short time. For example, when a node parent has failed, the node needs to find a new parent right away. However, taking into account the energy efficiency, the protocols using periodic beaconing should not use short intervals. As shown in Figure 3, when the link from C to A is failed, C needs to select a new parent. Assume at least eight rounds of beaconing are needed to accurately estimate link quality. The default beaconing interval in MintRoute is 8 s and at least 64 s are needed to recover the failure route. CENet solves the problem by considering a network change as an event. When an event is detected, route maintenance is triggered. Many beacons are exchanged in a short time and failed routes can be quickly repaired.
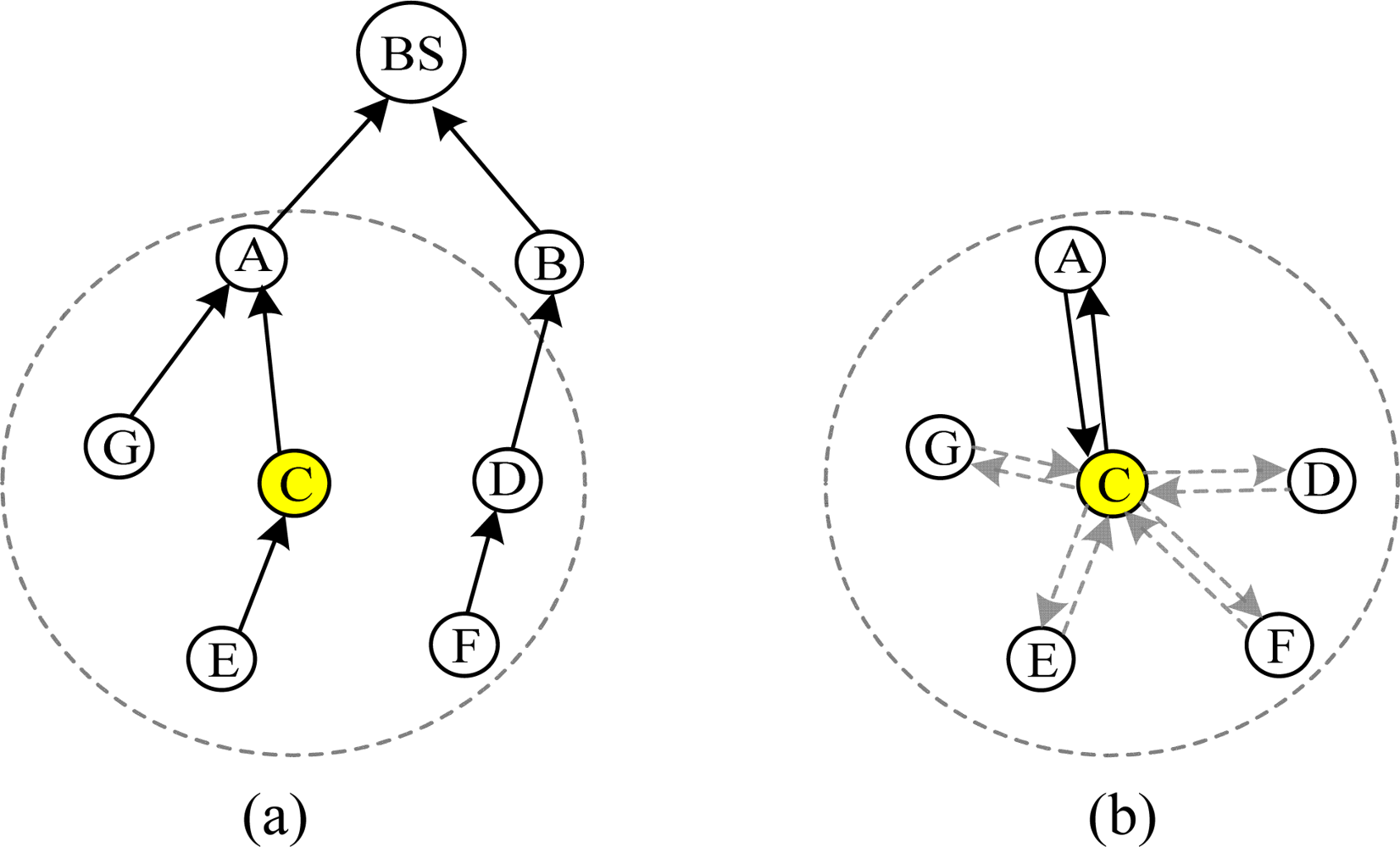
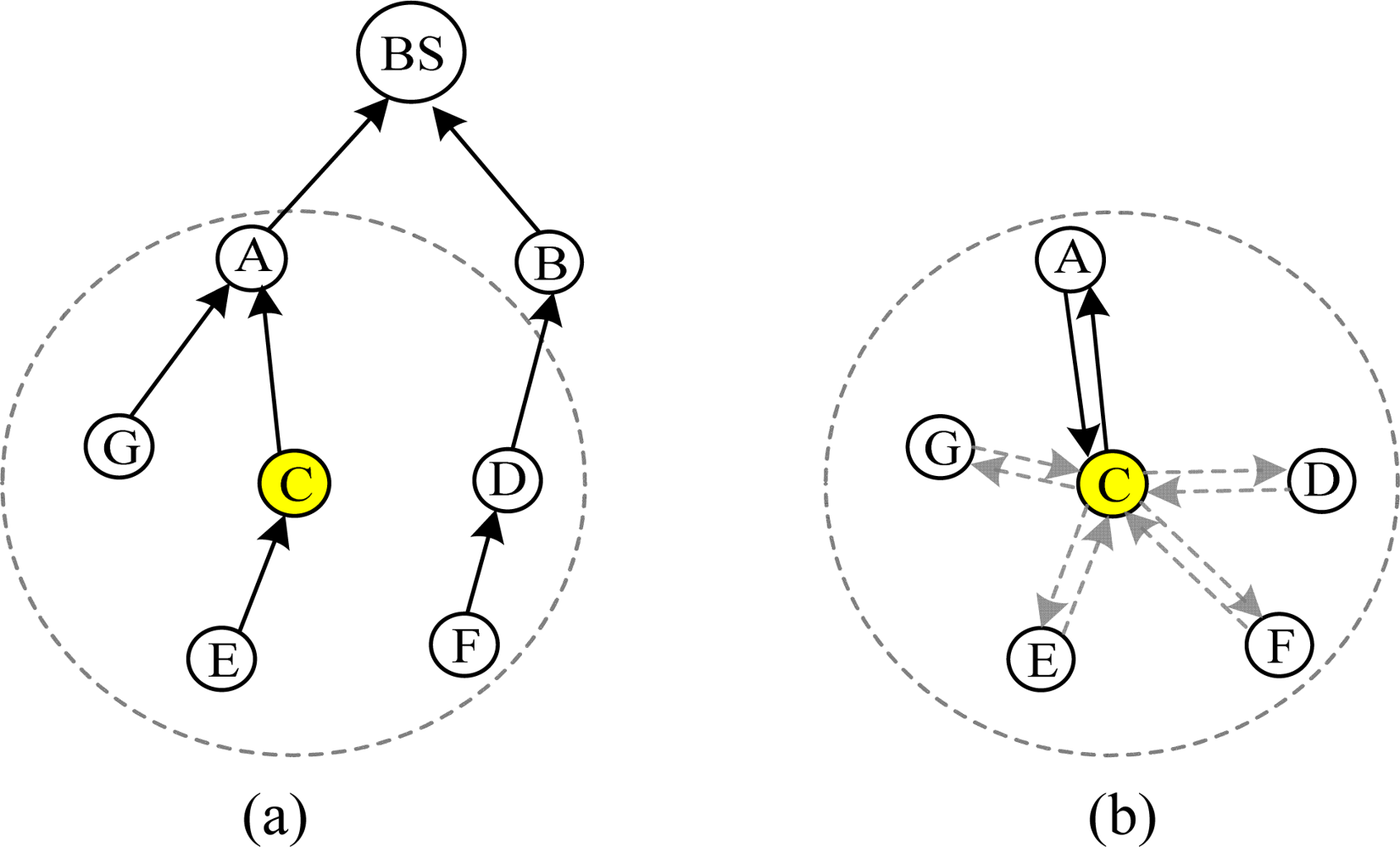
- Periodic beaconing is not energy efficient. A node periodically broadcasts beacons to its neighbors without considering link quality and data transmission. We denote the link from a node to its parent as L2P. A node selects the neighbor node with the best link as its parent. When L2P quality is good enough to support data transmission reliability, it is not necessary to change parent. As shown in Figure 4 (a), the parent of node C is A and only the bidirectional link between C and A effects their communication reliability. Let’s focus on the nodes inside the circle, as shown in Figure 4 (b). Node C broadcasts beacons to its neighbors and estimates the link qualities periodically. But for the link between C and A, the beacon exchanges between node G, D, E and F are redundant and waste energy. CENet solves the problem as follows: when a node is trying to find a parent, the link qualities of all the routes connected to the BS are estimated using beacons. When the node has found its parent, it stops issuing beacons. The link quality variation of L2P is monitored by transmitted data.
3.1. Routing Tree Construction
3.2. Link Quality Estimation
3.3. Routing Tree Maintenance
- When a node’s link quality to its parent gets worse or the link has failed.
- When a node receives a pull beacon.
4. Scheduling
4.1. Modified Scheduling Scheme Based on B-MAC
4.2. Analysis of Energy Consumption
5. Evaluation
5.1. Simulations
5.2 Experiments
5.2.1. Cabinet Environmental Deployment
5.2.2. Energy Consumption
5.2.3. The Effect of Interference
6. Related Works
7. Conclusions and Future Work
Acknowledgments
References and Notes
- Punchimudiyanse, M. Environment Monitoring System for Distributed Network Cabinets in Typical Campus Network. Proceedings of the International Conference on Industrial and Information Systems (ICIIS), Nawala, Sri Lanka, August 2007; pp. 17–20.
- Liu, J.; Zhao, F.; Reilly, J.; Souarez, A.; Manos, M.; Liang, C.; Terzis, A. Project Genome: Wireless Sensor Network for Data Center Cooling. Architect. J 2009, 18, 28–34. [Google Scholar]
- Patel, C.D.; Bash, C.E.; Sharma, R.; Beitelmal, M.; Friedrich, R. Smart Cooling of Data Centers. Proceedings of International Electronic Packaging Technical Conference and Exhibition, Maui, HI, USA, June 2003.
- Akyildiz, I.F.; Su, W.L.; Sankarasubramaniam, Y.; Cayirci, E. A Survey on Sensor Networks. IEEE Commun. Mag 2002, 8, 102–114. [Google Scholar]
- Woo, A.; Tong, T.; Culler, D. Taming the Underlying Challenges of Reliable Multihop Routing in Sensor Networks. Proceedings of the ACM Conference on Embedded Networked Sensor Systems (SenSys), Los Angeles, CA, USA, November 2003; pp. 14–27.
- Polastre, J.; Hill, J.; Culler, D. Versatile Low Power Media Access for Wireless Sensor Networks. Proceedings of the 2nd ACM Conference on Embedded Networked Sensor Systems (SenSys), Baltimore, MD, USA; 2004; pp. 95–107. [Google Scholar]
- The MultiHopLQI protocol. Available online: http://www.tinyos.net/tinyos-2.x/tos/lib/net/lqi/ (accessed on September 12, 2009).
- Maroti, M. Directed Flood-Routing Framework for Wireless Sensor Networks. Proceedings of the 5th ACM/IFIP/USENIX International Conference on Middleware, Toronto, Canada, October 2004.
- He, T.; Krishnamurthy, S.; Stankovic, J.; Abdelzaher, T.; Luo, L.; Stoleru, R.; Yan, T.; Gu, L.; Hui, J.; Krogh, B. An Energy-efficient Surveillance System Using Wireless Sensor Networks. Proceedings of the 2nd International Conference on Mobile Systems, Applications and Services (MobiSys), Boston, MA, USA; 2004; pp. 270–283. [Google Scholar]
- De Couto, D.S.J.; Aguayo, D.; Bicket, J.; Morris, R. A High-throughput Path Metric for Multi-hop Wireless Routing. Proceedings of the International Conference on Mobile computing and networking (MobiCom), San Diego, CA, USA, September 2003; pp. 134–146.
- Woo, A.; Culler, D. Evaluation of Efficient Link Reliability Estimators for Low-power Wireless Networks. Technical Report UCB//CSD-03-1270; U.C. Berkeley Computer Science Division: Berkeley, CA, USA, September 2003. [Google Scholar]
- Doherty, L.; Warneke, B.A.; Boser, B.E.; Pister, K. Energy and Performance Considerations for Smart Dust. Int. J. Par. Distr. Sys. Netw 2001, 4, 121–133. [Google Scholar]
- Stemm, M.; Katz, R. Measuring and Reducing Energy Consumption of Network Interfaces in Hand-held Devices. IEICE Trans. Commun 1997, 8, 1125–1131. [Google Scholar]
- Ye, W.; Heidemann, J.; Estrin, D. An Energy-efficient MAC Protocol for Wireless Sensor Network. Proceedings of the Twenty-First Annual Joint Conference of the IEEE Computer and Communications Societies (INFOCOM), San Francisco, CA, USA; 2002; pp. 23–27. [Google Scholar]
- Hohlt, B.; Doherty, L.; Brewer, E. Flexible Power Scheduling for Sensor Networks. Proceedings of the 3rd International Symposium on Information Processing in Sensor Networks (IPSN), Berkeley, CA, USA; 2004; pp. 205–214. [Google Scholar]
- Zhang, Z.; Yu, F. A Depth-based TDMA Scheduling for Clustering Sensor Networks. Proceedings of the 4th International Conference on Frontier of Computer Science and Technology, Shanghai, China, December 2009.
- Wu, H.; Luo, Q.; Xue, W. Distributed Cross-Layer Scheduling for In-Network Sensor Query Processing. Proceedings of the Fourth Annual IEEE International Conference on Pervasive Computing and Communications (PERCOM), Pisa, Italy, March 2006; pp. 176–189.
- Levis, P.; Madden, S.; Polastre, J.; Szewczyk, R.; Whitehouse, K.; Woo, A.; Gay, D.; Hill, J.; Welsh, M.; Brewer, E.; Culler, D. TinyOS: An Operating System for Sensor Networks. In Ambient Intelligence; Weber, W., Rabaey, J., Aarts, E., Eds.; Springer-Verlag: Berlin, Germany, 2005; pp. 115–148. [Google Scholar]
- Levis, P.; Lee, N.; Welsh, M.; Culler, D. Tossim: Accurate and Scalable Simulation of Entire TinyOS Applications. Proceedings of the 1st ACM Conference on Embedded Networked Sensor Systems (SenSys), Los Angeles, CA, USA; 2003; pp. 126–137. [Google Scholar]
- Rappaport, T.S. Wireless Communications: Principles and Practices, 2nd ed.; Prentice Hall Press: Englewood Cliffs, NJ, USA, 2001. [Google Scholar]
- Stonebraker, M.; Kemnitz, G. The POSTGRES Next Generation Database Management System. Commun. ACM 1991, 34, 78–92. [Google Scholar]
- Krishnamurthy, L.; Adler, R.; Buonadonna, P.; Chhabra, J.; Flanigan, M.; Kushalnagar, N.; Nachman, L.; Yarvis, M. Design and Deployment of Industrial Sensor Networks: Experiences from A Semiconductor Plant and the North Sea. Proceedings of the 3rd ACM Conference on Embedded Networked Sensor Systems (SenSys), San Diego, CA, USA, November 2005; pp. 64–75.
- Werner-Allen, G.; Johnson, J.; Ruiz, M.; Lees, J.; Welsh, M. Monitoring Volcanic Eruptions with A Wireless Sensor Network. Proceedings of the 2nd European Workshop on Wireless Sensor Networks (EWSN), Istanbul, Turkey, January 2005; pp. 108–120.
- Glaser, S.D.; Chen, M.; Oberheim, T.E. Terra-Scope™ A MEMA-based Vertical Seismic Array. Smart Struct. Syst 2006, 2, 115–126. [Google Scholar]
- Tolle, G.; Polastre, J.; Szewczyk, R.; Turner, N.; Tu, K.; Buonadonna, P.; Burgess, S.; Gay, D.; Hong, W.; Dawson, T.; Culler, D. A Macroscope in the Redwoods. Proceedings of the 3rd ACM Conference on Embedded Networked Sensor Systems (SenSys), San Diego, CA, USA, November 2005; pp. 51–63.
- Li, M.; Liu, Y. Underground Coal Mine Monitoring with Wireless Sensor Networks. ACM Trans. Sensor Netw (TOSN) 2009, 5, 20–32. [Google Scholar]
- Engel, J.M.; Zhao, L.; Fan, Z.; Chen, J.; Liu, C. Smart Brick: A Low Cost, Modular Wireless Sensor for Civil Structure Monitoring. Proceedings of the International Conference on Computing, Communications and Control Technologies (CCCT), Austin, TX, USA, August 2004.
- Kim, S.; Pakzad, S.; Culler, D.; Demmel, J.; Fenves, G.; Glaser, S.; Turon, M. Health Monitoring of Civil Infrastructures Using Wireless Sensor Networks. Proceedings of the 6th International Conference on Information Processing in Sensor Networks (IPSN), Cambridge, MA, USA, April 2007; pp. 254–263.
- Szewczyk, R.; Mainwaring, A.; Polastre, J.; Culler, D. An Analysis of A Large Scale Habitat Monitoring Application. Proceedings of the Second ACM Conference on Embedded Networked Sensor Systems (SenSys), Baltimore, MD, USA, November 2004; pp. 214–226.
- Nasipuri, A.; Cox, R.; Alasti, H.; Van der Zel, Luke; Rodriguez, B.; McKosky, R.; Graziano, J. Wireless Sensor Network for Substation Monitoring: Design and Deployment. Proceedings of the 6td ACM Conference on Embedded Networked Sensor Systems (SenSys), Raleigh, NC, USA, November 2008; pp. 365–366.
- Liang, M.; Liu, J.; Luo, L.; Terzis, A. RACNet: Reliable ACquisition Network for High-Fidelity Data Center Sensing, Technical Report, MSR-TR-2008-144; Microsoft Research: Redmond, WA, USA, 2008. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mote Type | Dot | Mica2 |
|---|---|---|
| Microcontroller | MSP430F1611 | ATmega128 |
| Radio | CC1101 | CC1000 |
| Data rate (kbps) | 38.4 | 38.4 |
| Power dissipation for reception (mA) | 15.0 | 15.0 |
| Power dissipation for transmission (0dBm) (mA) | 16.0 | 16.0 |
| Battery | A button battery | A pair of rechargeable batteries |
| Integrated sensors | Yes | No |
| i | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
| Ci | 8 | 7 | 10 | 7 | 9 |
| Hi | 8 | 7.5 | 0 | 7 | 0 |
| Ti | 9 | 9 | 0 | 8 | 0 |
| Routing maintenance | No | No | Yes C3 > T2 | No | Yes C5 > T4 |
| Operation | Energy (mJ) | Time (s) | ||
|---|---|---|---|---|
| Receive a packet | 5.74704 | Erx | 0.127 | trx |
| Transmit a packet | 7.66272 | Etx | 0.127 | ttx |
| Sense environment | 66.0 | Es | 1.1 | ts |
| Notation | Parameter | Value |
|---|---|---|
| Isleep | Sleep current (mA) | 0.03 |
| Ilisten | Average listening current (mA) | 2.0 |
| V | Voltage | 3.0 |
| tlisten | Listening time (s) | 0.01 |
| n | Number of neighbors | 3 |
| Sealed steel box | Laboratory | With interference | |
|---|---|---|---|
| CENet | 100% | 94.5% | 89.2% |
| Standard | 100% | 82.3% | 64.7% |
© 2010 by the authors; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Zhang, Z.; Yu, F.; Chen, L.; Cao, G. CENet: A Cabinet Environmental Sensing Network. Sensors 2010, 10, 1021-1040. https://doi.org/10.3390/s100201021
Zhang Z, Yu F, Chen L, Cao G. CENet: A Cabinet Environmental Sensing Network. Sensors. 2010; 10(2):1021-1040. https://doi.org/10.3390/s100201021
Chicago/Turabian StyleZhang, Zusheng, Fengqi Yu, Liang Chen, and Guangmin Cao. 2010. "CENet: A Cabinet Environmental Sensing Network" Sensors 10, no. 2: 1021-1040. https://doi.org/10.3390/s100201021
APA StyleZhang, Z., Yu, F., Chen, L., & Cao, G. (2010). CENet: A Cabinet Environmental Sensing Network. Sensors, 10(2), 1021-1040. https://doi.org/10.3390/s100201021