1. Introduction
This work addresses the problem of determining a non-arbitrary measurement selection criterion for Gaussian-based algorithms. In particular, this work presents the problem of selecting the most significant features from an environment from both an estimation convergence perspective and the covariance matrix associated with the extracted features point of view.
The way a sensor extracts features from the environment is known as
sensing methodology and the set of features extracted from the environment can be used to create a map of the environment [
1,
2,
3]. The nature of the feature is related with the capabilities of the sensor used, although this relation is not strictly direct. For example, a range laser sensor is able to acquire range information regarding the surrounding environment [
4,
5]. With the set of laser measurements it is possible to extract geometric primitives such as lines or corners—associated with points—to infer moving objects or to recognize previously defined patterns [
6]. Similar procedures can be implemented on sonar range sensors, where the features extracted will have a larger associated covariance matrix due to the high uncertainty associated with the sonar measurements [
1,
7,
8]. Also, the features extracted from a range sensor are not necessarily related to features extracted by, e.g., a monocular vision system [
9,
10]. Therefore, the features extracted by sensors are dependent on the nature of such sensors. Nevertheless, further processing allows the extraction of valuable information regarding the raw sensor data [
11].
Features extracted from the environment can also be used for localization purposes. Localization procedures can be performed by both a direct method and an indirect method. A direct method uses sensors specially dedicated to estimate the a certain position. For example, a GPS (global positioning measurement) can be considered as a direct positioning sensor [
2], as is an IMU (inertial module unit) [
12], a dead-reckoning system [
2], an UWB (ultra-wide band) localization system [
13],
etc. These methods allow the estimation of a given position within the environment regardless of the elements of the environment. For example, [
12] uses an inertial/GPS fusion technique to estimate the position of an UAV (unmanned aerial vehicle); in [
14], the authors use a 3-axis magnetic sensor to estimate position and orientation. In addition, in [
15], the author uses a distributed sensor network to localize nodes based on acoustic signals. Also, in [
16], the authors use dead-reckoning and sensor data fusion integration to estimate the location of a vehicle as it drives through an environment.
On the other hand, an indirect positioning system uses the information provided by the environment to localize a given object (or a set of objects) within such environment. Such is the case shown in [
17], which extracts patterns from consecutive frames of 2-D images to localize the vision system within the environment; with the same insight, [
18] uses infrared images to recognize patterns associated with a given target and to localize such a target within the environment; in [
19], the authors use edges detection from ultrasonic data for objects localization within unknown environments. In [
20], the authors use beacons—strategically placed over a given environment—to localize a mobile anchor.
A SLAM (simultaneous localization and mapping) algorithm uses both the direct and the indirect localization method for concurrently estimating the pose (position and orientation) of a given sensor (or a vehicle equipped with such a sensor) while mapping the surrounding environment [
1,
7,
8,
21]. Thus, for example, in a feature-based SLAM, the features extracted from the environment are used to estimate the pose of a mobile and to build a feature-based model of the environment (see [
21,
22]). The nature of the feature uses is strictly dependent on the sensor capabilities. Thus, in [
23] the authors use a line-based SLAM, where lines are extracted by a laser range sensor and the implementation of recursive algorithms to estimate lines within the Cartesian space; in [
3], the author uses point-based features (like corners) to perform a SLAM algorithm. On the other hand, [
24] uses a stereo-vision system to estimate the orientation of the camera while mapping the surrounding environment. In [
25], the authors use a SLAM algorithm—based on a monocular vision system—to compensate for the accumulative errors in an inertial-based navigation system.
Several filters have been proposed in the literature to enhance the measurement process, minimizing its errors, and improving the efficiency of the estimation process. Such is the case of the Gaussian-based filters [
26]. Gaussian-based filters have been used to improve the localization system, the environment mapping, and the SLAM algorithm. The EKF (extended Kalman filter) is one of the first and m most commonly used Gaussian-based filters. It can be used equally well for localization, mapping, or as a SLAM solution [
1,
7,
8,
21,
23,
25,
27]. It uses linearized models for both the sensor’s motion model and the measurements (
i.e., extracted features). Another solution is the EIF (extended information filter) [
1]. The EIF reduces the computational cost associated with the correction stage of the EKF. An alternative strategy, the UKF (unscented Kalman filter) has a better performance when dealing with non-linear models for the measurements and the environment [
1,
28]. Nevertheless, the sequential EKF [
1,
29] considerably reduces the computational costs of the EKF by using sparse matrices in its formulation. The EKF, EIF and UKF are considered to be Gaussian filters [
6]. Other non-Gaussian solutions, such as the particle filter (PF) and Markov processes have also shown to be effective to solve the SLAM problem [
30,
31,
32]. In this work, we focus on Gaussian-based estimation algorithms.
If at time instant
k there are, say, five measurements (features) with correct data association [
7,
8], then the EKF, EIF and UKF would use the five features at the same time to correct the system state and its covariance matrix [
1,
7,
25]. Therefore, as the number of features with correct association increases, the computational cost associated with the correction stage of the SLAM algorithm also increases. Also, from the five features available at time
k, not all the five features will contribute in the same manner to improve the estimation process. We could have the case when only one feature contributes the most to the estimation process and the contribution of the remaining four features can be discarded.
Several works have been proposed in the literature to restrict the number of features to be used within the correction stage of a Gaussian-based estimator. Thus, [
24] uses only a fixed number of features at every SLAM execution cycle, whereas [
23] uses only the most robust features extracted by the feature extraction procedure. On the other hand, [
33] uses an entropy [
34] gate based on the SLAM covariance matrices to restrict the features to be used by such a SLAM algorithm. Thus, only the features whose associated entropy is below a certain threshold are used. With the same insight, approaches as the ones shown in [
35,
36] offer optimal solutions to the restriction of features to be used by the estimation algorithm: the use of sub-maps reduces the computational cost without affecting the optimality of the estimation. On the other hand, the UKF proposed by [
37] offers a slightly sub-optimal solution for the SLAM problem, showing improvements in the computational cost and in the non-linearity of both the process and the measurement models. However, no considerations are made regarding how the set of features with correct data association are managed.
Thus, the main contribution of this work lies in the proposal of a new measurement (feature) selection criterion based on the covariance matrices associated with the measurements, which are also associated with the feature extraction procedure and the sensor used. In [
29,
33,
38], the feature selection criteria are based on the manipulation of the covariance matrices—predicted and corrected ones—associated with the estimation system state. In this article, the feature selection criterion proposed does not process the estimation information. Instead, it uses the covariance matrix associated with a feature to decide whether or not that feature will have implications on the convergence of the estimation algorithm. The last also implies that the feature selection criterion proposed herein decreases the computational cost associated with the estimation process because no further processing is needed in order to select the most significant features. Thus, not all detected features from the environment are necessary for efficient estimation purposes (e.g., for localization, mapping, or SLAM).
In this work, a feature selection criterion for the EKF, the EIF and the UKF-based algorithms is shown. The three Gaussian algorithms are used for environment modeling; although the results presented herein are not restricted to the application in which the Gaussian algorithms are immersed in. The selection criterion can be summarized as follows: let M be a set of, e.g., five features with correct data association at time k. The selection criterion presented herein chooses the most significant features according to their associated covariance matrices and their filter convergence implications. In addition, the same feature selection criterion is then applied to select the most meaningful feature in the presence of redundant information. Therefore, if a same feature is acquired by two or more different sensors—or by two or more feature extraction procedures—then the most meaningful feature is determined based on the selection criterion presented herein. Furthermore, we show that the feature whose covariance matrix is the closest to a null matrix yields a global minimum in the correction stage of the Gaussian-based algorithms.
This work is organized as follows.
Section 2 shows the Gaussian convergence theorem and selection criterion proposal for the EKF, the EIF and the UKF algorithms.
Section 3 shows several implementation results of the selection criterion proposed in this work. Conclusions are drawn in
Section 4.
2. General Proposal
The general idea of the feature selection criterion presented in this work is illustrated in
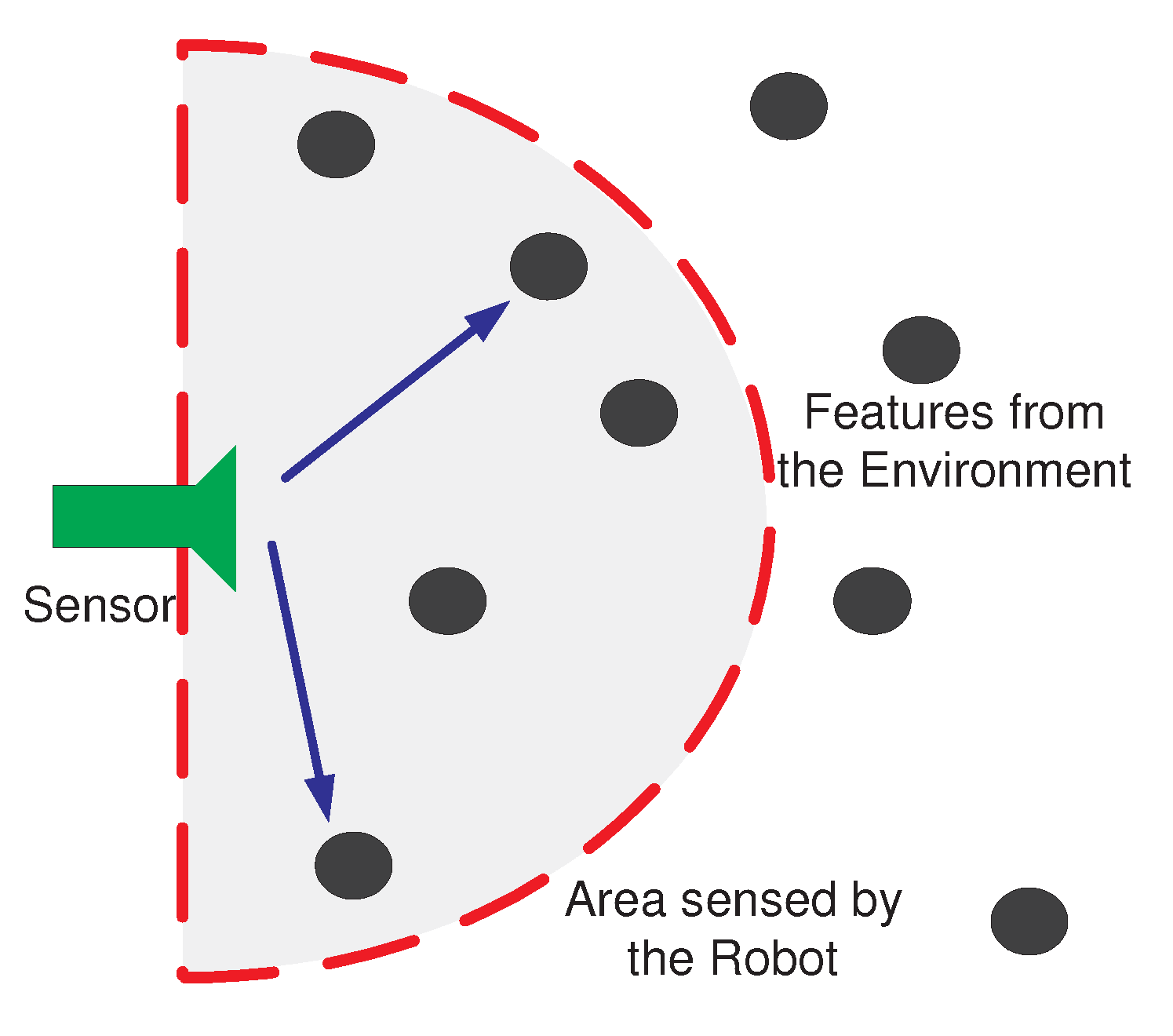
Figure 1. In
Figure 1, the solid-black circles represent general features from the environment; the grey zone limited by a dashed red line represents the area of the environment within which the sensors are able to detect and to extract features. As it can be seen in
Figure 1, five features lie within the sensor field. The feature selection criterion introduced in this work allows the selection of the most significant features and thus restricts the number of features used by the correction stage of the Gaussian-based estimation algorithms (two features are selected in
Figure 1).
Figure 1.
Graphical representation of features selection procedure.
Figure 1.
Graphical representation of features selection procedure.
The EKF convergence theorem, presented in [
22] establishes that, at the limit,
where
is the corrected covariance matrix associated with the EKF process at time
k. Also, according to [
38],
where
is the predicted covariance matrix. Therefore, in a consistent estimation process, the volume of uncertainty—expressed by the determinant of the covariance matrices in Equation (
2)—of the EKF correction stage is always smaller than, or at least equal to, the EKF prediction stage. Thus, the feature selection criterion used in this work is based on choosing those features with correct association that cause the largest decrement of the covariance ratio shown in Equation (
2) in order to execute the correction stage of the EKF estimation algorithm. The selection procedure is based only on the covariance matrix associated with the feature extraction procedure and it is shown in Equation (
3).
Thus, let
M be the set of features detected at time
k and
N the set of features with correct association. Let
be a feature -observation—from the environment and
R the covariance matrix of the corresponding observation noise—obtained from the feature extraction procedure. Equation (
3) implies that the most significant feature in
N at time
k is the one that causes the largest decrement of the uncertainty volume of the corrected covariance matrix of the Gaussian estimation algorithm (see [
29]). Therefore, the selection criterion implemented in this work consists of using only the optimal features found in Equation (
3) to correct the estimation algorithm. The feature selection criterion shown in this work applies only to the correction stage of the Gaussian-based algorithms.
2.1. The Extended Kalman Filter
The general formulation of the EKF algorithm is shown in Equation (2.1). In Equation (2.1),
is the system state vector (where
is the predicted EKF system state vector and
its correction).
f is the model of the process (it describes its motion).
is the control commands vector;
is the covariance matrix associated with
.
is the Jacobian matrix of
f with respect to
;
represents the Gaussian noise of the process and
is its Jacobian matrix;
is the Kalman gain,
is the Jacobian matrix associated with the observation model and
is the covariance matrix associated with such an observation (feature).
is the current feature of the environment extracted by the system whereas
h is its mathematical model. Further information of the EKF and its implementation issues can be found in [
1,
7,
38].
For simplicity, subindex k associated with time in Equation (2.1) will be omitted in the remainder of this section. The objective is to determine which feature is the most important from the convergence perspective of the EKF algorithm by using the covariance matrix associated with an observed feature.
The following lemmas show the behavior of the uncertainty volume of the EKF correction stage at the limits of the covariance matrix associated with an observation.
Lemma I– Let
—where
stands for positive definiteness—be a positive definite covariance matrix associated with a given observation
z. Also, let
imply that all entries of
R, and its corresponding eigenvalues, tend to zero without compromising the positive definiteness of
R, then
Proof–
According to Equation (2.1) we have that,
where
is the identity matrix with the dimension of
P. By applying the determinant to the above expression we have the following result [
39],
In Equation (
6),
because
. Then,
Therefore, Equation (
7) shows that when
,
, which proves Lemma I.-
Lemma I shows that when
, the volume of uncertainty associated with the correction stage of the EKF—as defined in Equation (
1)—tends to its minimum. Also, as
, the correction stage of the EKF becomes independent on the Jacobian matrix associated with the observation. The following lemma applies to the case when
.
Lemma II– Let
R be the covariance matrix associated to an observation as in Lemma I. Also, let
imply that all entries of
R, and its corresponding eigenvalues, tend to infinity without compromising the positive definiteness of
R. Then,
Proof–
According to Equation (2.1):
, therefore,
In (
9), when
, it becomes much greater than
—under a consistent estimation assumption [
7,
8]—and the Kalman gain,
K, tends to a null matrix. Thus, applying Equation (
9) into the covariance matrix of the EKF system state,
Thus Equation (
8) follows.-
Therefore, when the observation z has associated a covariance matrix R with a high uncertainty, the uncertainty volume associated with the covariance matrix of the EKF estimation process is not decreased.
Using the results shown above, it is possible to see that minimizes (2.1).
Thus, the feature selection approach shown in Equation (
3) is applied to the EKF algorithm using the previous lemmas, as it is shown in Equation (
11).
In Equation (
11)
N is the set of features with correct association at time instant
k and
is the number of features with correct association. Therefore, the feature with minimum covariance matrix is considered as the optimal feature to be used within the correction stage of the EKF.
2.2. The Extended Information Filter
The general formulation of the EIF algorithm is shown in Equation (
12). In Equation (
12),
is the vector system state;
and
–the information matrix–are the parameters of the EIF, where
is of the dimension of
and
is of the dimension of the covariance matrix associated with vector system state;
is the Jacobian matrix associated with the model of the system process–
g–whereas
is the covariance matrix associated with the process noise;
represents the command control vector.
is the Jacobian matrix associated with the model of the observation and
is the covariance matrix of the observation noise; the current feature processed by the EIF is denoted by
. Finally,
and
are the predicted parameters of the EIF (further information regarding the EIF can be found in [
1,
40]).
The parametrization of the EIF can be derived directly from the EKF formulation [
1]. In Equation (
13),
ξ is the EKF system state and
P its covariance matrix.
Thus, according to Equation (
1) and Equation (
13) it is possible to see that,
Therefore,
. Thus, the feature that contributes the most to the EIF process is the feature that increases the volume of information of the information matrix of the EIF algorithm. For simplicity, subindex
k associated with time in Equation (
12)–Equation (
14) will be omitted in the remainder of this section.
The following lemmas show the behavior of the volume of information associated with the EIF at the limits of the covariance matrix associated with a given observation.
Lemma III– Let
be a positive definite covariance matrix associated with an observation
z, as previously stated in Lemma I. Then,
Proof–
Regarding Equation (
13) and Lemma I, the proof of Lemma III is straightforward. Thus, according to Equation (
5) and Equation (
13),
therefore,
which proves Lemma III.-
Lemma III establishes that when
, the volume of information of the corrected stage of the EIF tends to infinity. Thus,
is a maximum of the correction stage of the EIF. Also, as
, the correction stage of the EIF becomes independent on the Jacobian matrix associated with the observation. The following lemma deals with the case when
.
Lemma IV– Let
R be the covariance matrix associated with an observation as stated in Lemma I. Also, let
imply that all entries of
R, and its corresponding eigenvalues, tend to infinity without compromising the positive definiteness of
R. Then,
Proof–
As in Lemma III, the proof is straightforward, using the results shown in Equation (
13) and Equation (
5) and in Lemma II.
Lemma IV shows that when the observation is too noisy–i.e., the entries of its associated covariance matrix tend to infinity—then the information matrix of the EIF algorithm is not improved by such observation. This is so because as , the term tends to its null. Therefore, the volume of information is not increased.
Using the results shown in Lemmas III and IV, it is possible to see that the volume of information reaches its maximum when .
The feature selection approach shown in Equation (
3) is applied to the EIF algorithm using Lemmas III and VI, as it is shown in Equation (
17)—which is equivalent to the one shown in Equation (
3)–.
In Equation (
17),
N is the set of features with correct association at time instant
k and
is the number of features with correct association. Thus, the feature whose associated covariance matrix is the closest to the null matrix
is chosen as the optimum feature for the EIF correction stage.
2.3. The Unscented Kalman Filter
The formulation of the UKF is shown in Equation (
18). In Equation (
18),
and
μ are the predicted and corrected system state, respectively;
and Σ are the predicted and corrected covariance matrices associated with the UKF system state;
u is the control vector input and
g the function that describes the mobile robot motion;
χ are the sigma points of the transformation associated with the estimation system state whereas the
-sigma points are associated with the observation model;
is the feature prediction and
is a cross-covariance term;
K is the Kalman gain,
R is the covariance matrix associated with the extracted feature and
Q is the covariance matrix of the process noise. Additional information regarding the UKF can be found in [
1,
41].
Applying the same procedure as the EKF–see Lemmas I and II–we have that,
In Equation (
18), let
be
. Then Equation (
19) turns into:
Considering that, in Equation (
20) Σ,
and
are positive semi-definite, then Equation (
19) might reach a global minimum as
. Nevertheless, as it is shown in Equation (
20), the limit of Σ—the corrected covariance matrix—when
R tends to a null, depends on
M, where
. Each feature has its own sigma points and then, each feature has its own associated
M–matrix. On the other hand, for the EKF and the EIF case, in the limit the correction stage becomes independent on the Jacobian matrix associated with the observation model as shown in Equation (
7) and Equation (
15). For simplicity, subindex
k associated with time in Equation (
18) will be omitted in the remainder of this section
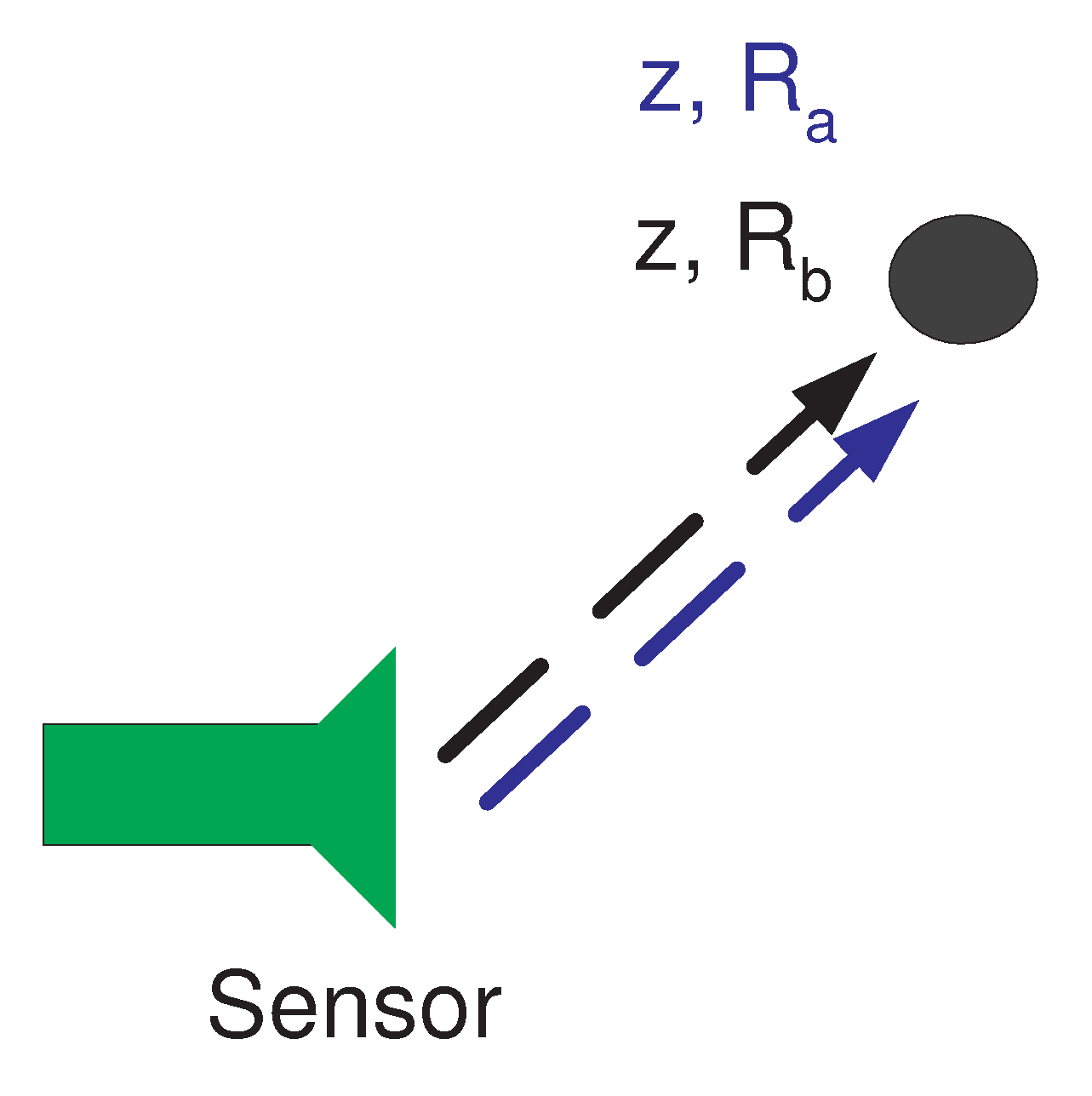
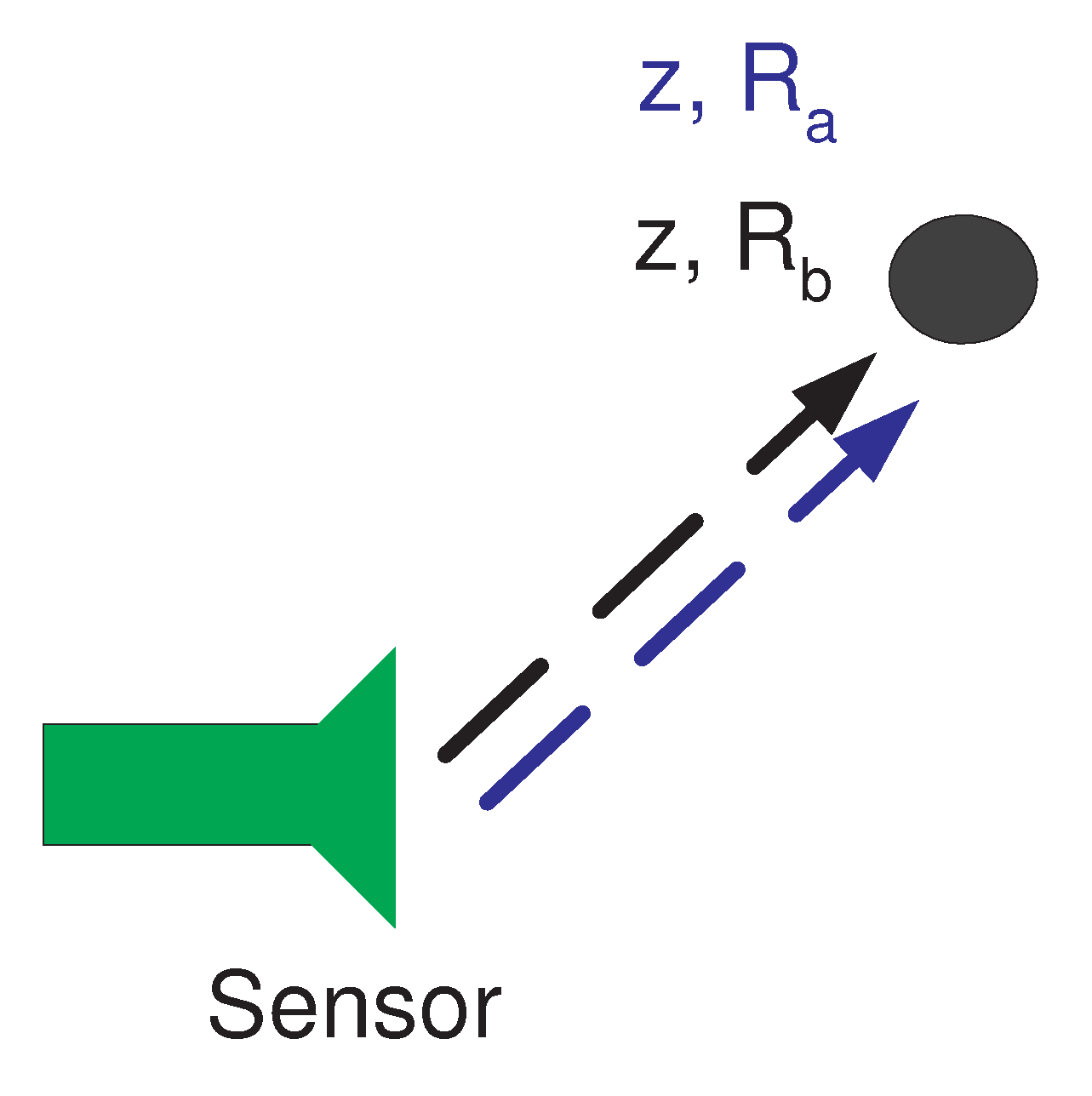
In order to use the feature selection criterion proposed in this work, the following modification is introduced. Instead of comparing two different features, a same feature extracted by—at least—two different methods or sensors will be used (see
Figure 2). Examples of this situation is a point-based feature extracted by a range laser sensor and by sonar (see [
4,
42]); or a position estimation given by the mobile robot’s encoder-based odometric measurements and the position estimation given by the integrations of internal accelerometers measurements [
2].
Figure 2.
Graphical representation of the feature selection for the UKF. A same feature is extracted from the environment—z—by two different methods—or sensors—with their respective covariance matrices ( and ).
Figure 2.
Graphical representation of the feature selection for the UKF. A same feature is extracted from the environment—z—by two different methods—or sensors—with their respective covariance matrices ( and ).
Lemma V– Let
z be a same feature extracted by two different methods—or sensors—as shown in
Figure 2 and let
and
be their associated positive definite covariance matrices. If
(where ⪰ stands for
positive semi-definite) then,
In Equation (
21),
,
is the volume of uncertainty of the UKF algorithm when using observation
z and its corresponding covariance matrix
in the correction stage of the filter.
Proof–
Let
as established in the hypothesis, then, according to Equation (
18),
, but
is the same for both feature detection processes, therefore,
Also, considering that
S is positive definite, then [
39],
Since
is also positive definite, the following result is valid [
39]:
Also
in Equation (
18) is positive definite, then:
Considering that
, then the expression above turns into the following:
Adding
—the predicted UKF system state covariance—to both sides of the expression above and re-ordering, we have that,
Therefore, according to Equation (
18) it is possible to see that
. Considering also that Σ is positive semi-definite, then
—see [
39]—which proves Lemma V.-
Thus, Lemma V establishes that the measurement with the lowest covariance will have the largest decrement of the uncertainty associated with the estimation process. Also, Lemma V can be directly applied to the EKF and EIF-based algorithms, when the feature-selection criterion is restricted only to those features that can be extracted—acquired—by two or more methods—or sensors. Thus, under the same hypothesis of Lemma V, for the EKF case:
; and, for the EIF case:
. Both expressions can be directly obtained from Equations (2.1) and Equation (
12), considering that a same feature has a same Jacobian matrix associated with it [
29].
4. Conclusions
This paper has presented a non-arbitrary feature selection criterion for Gaussian-based SLAM algorithms. In particular, the feature selection criterion was applied to an EKF, EIF and UKF-based SLAM algorithm. The selection criterion presented herein was based on a convergence perspective of the SLAM algorithm implemented on each filter. It consisted of choosing only the features that cause the largest decrement of the uncertainty associated with the correction stage covariance matrix of each filter (EKF, EIF and UKF). The last was accomplished by using the covariance matrix associated with the feature’s extraction procedure.
It was shown that, for the three filters studied, the feature that causes the largest decrement of the uncertainty associated to the correction stage of the SLAM is the feature that has associated the smallest covariance matrix. Also, when the covariance matrix R associated with a feature tends to a null matrix of the dimension of R, the corrected covariance matrix of the EKF and UKF SLAM algorithms present a minimum for R, i.e., the volume of uncertainty reaches a minimum. On the other hand, for the EIF–SLAM case, when R tends to a null, the volume of information reaches a maximum for R.
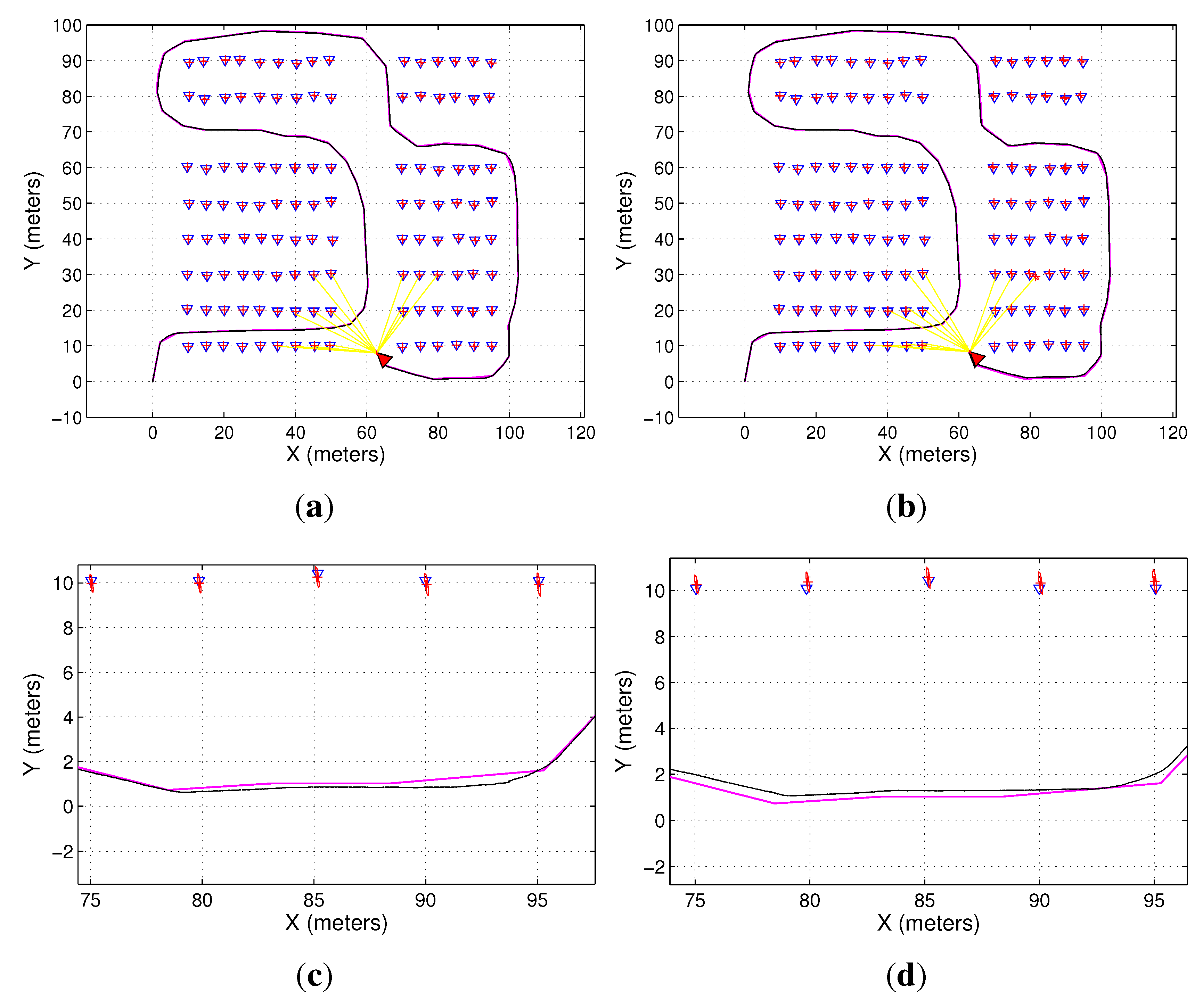
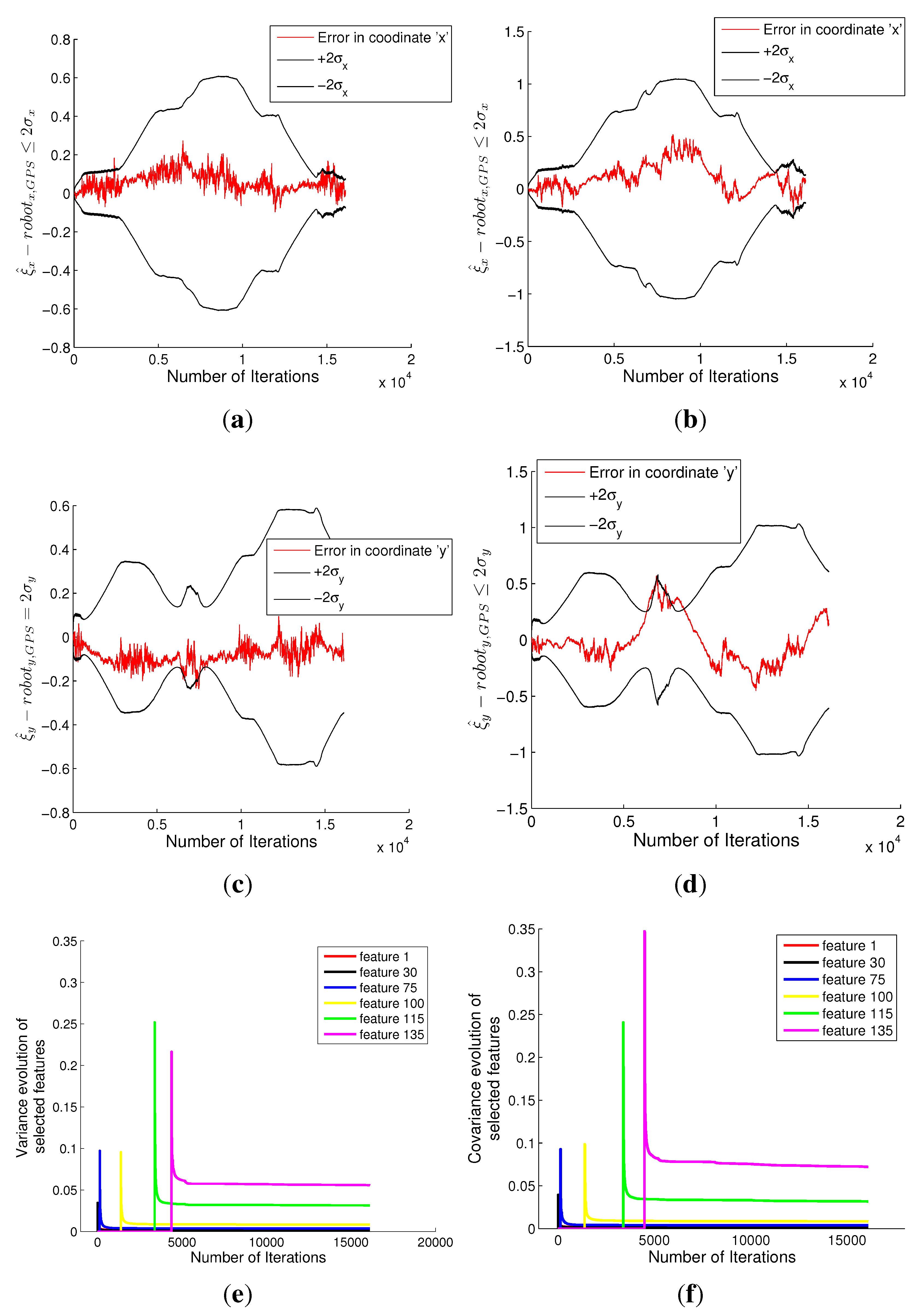
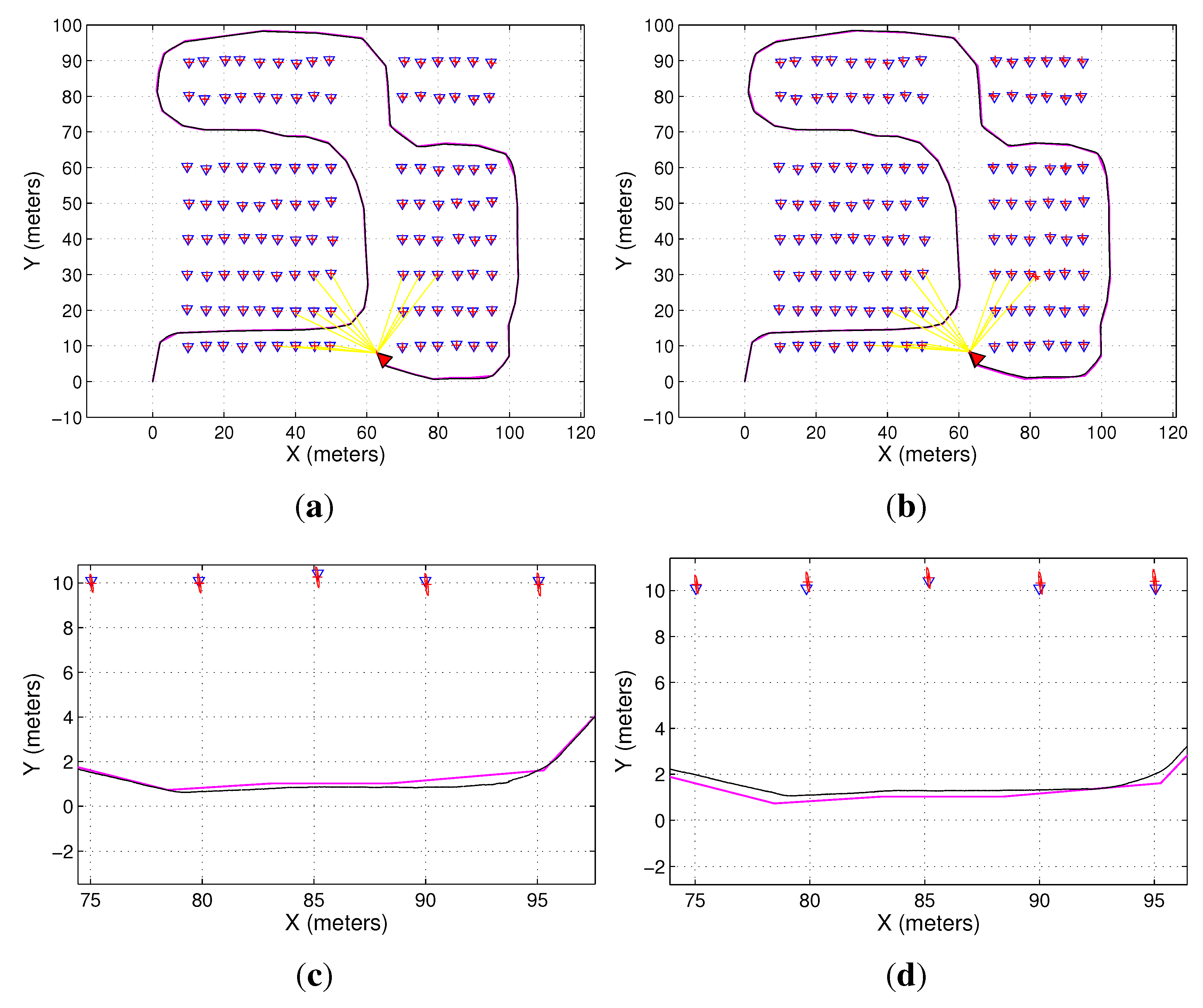
The results included in this work were obtained through a long-term experiment: the robot navigated approximately 420 meters within an fruit plantation while executing an EIF–SLAM algorithm with the feature selection approach shown in
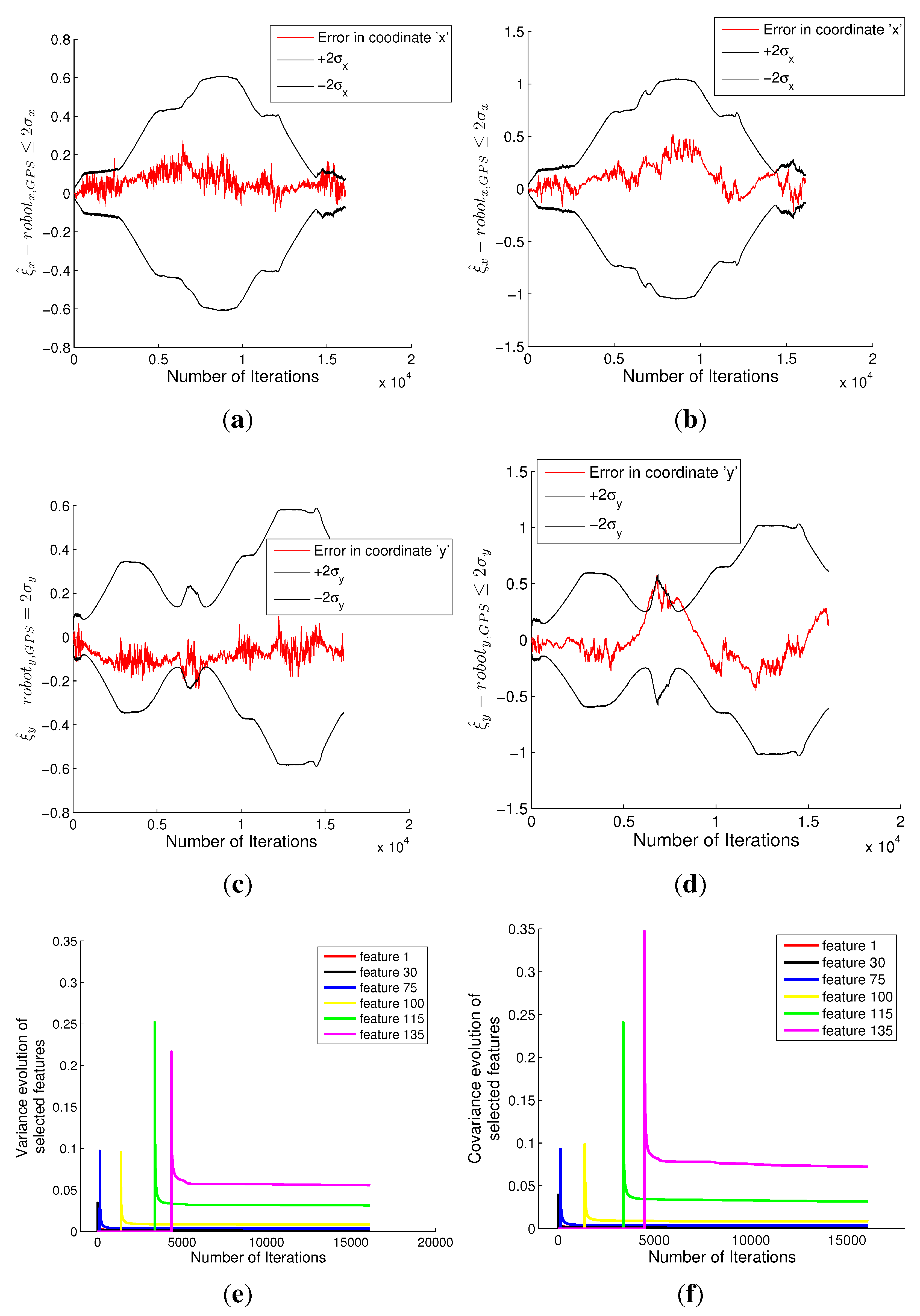
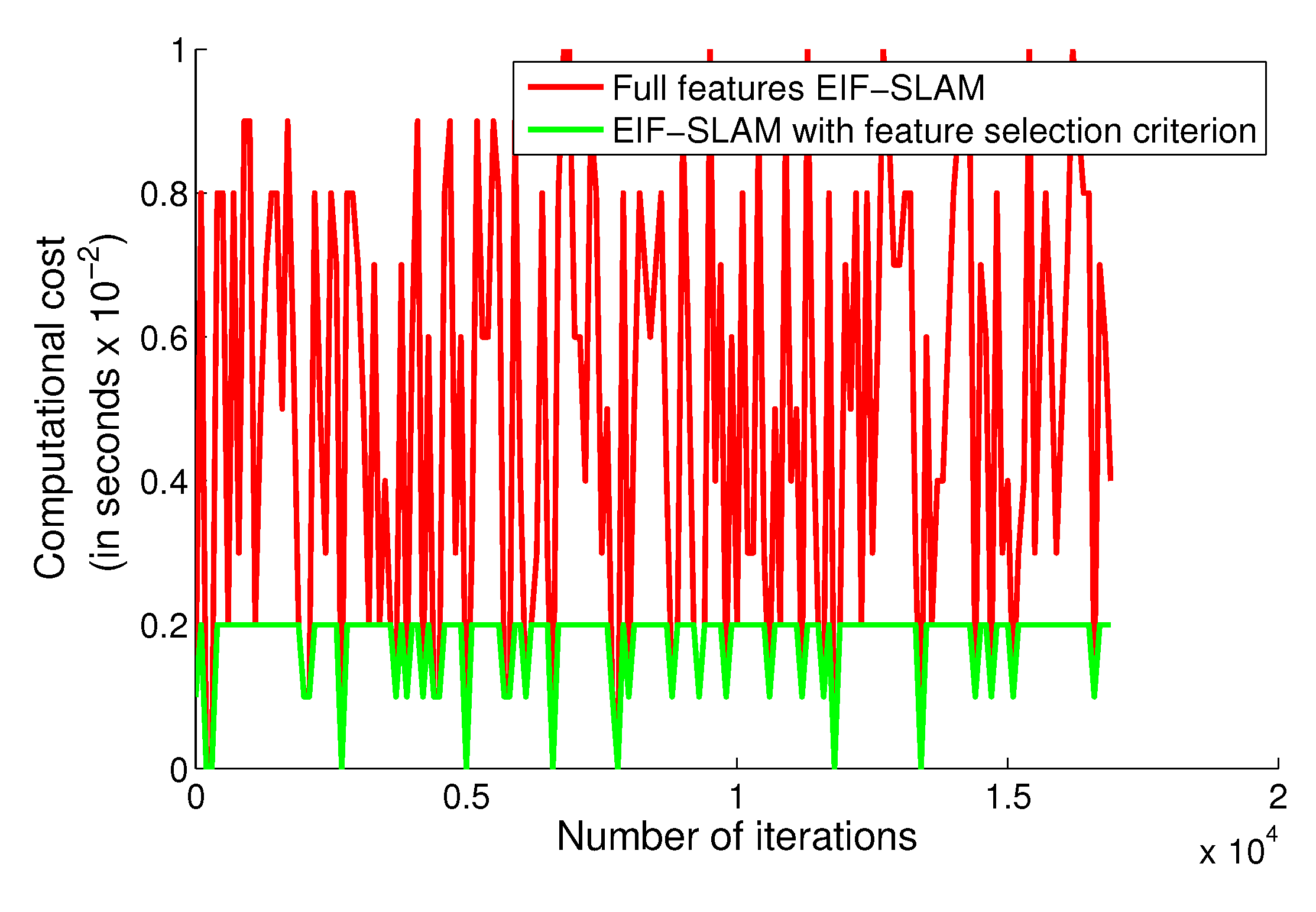
Section 2.2. The features extracted from the environment consisted of tree-stems. The map obtained by the EIF–SLAM with the feature selection criterion proposed herein has shown it to be coherent with the a previously obtained map by means of differential GPS measurements. Also, the consistency test associated with the position of the mobile robot has shown that the position estimate remains bound by twice its standard deviation. In addition, the map obtained by the EIF–SLAM algorithm without feature selection was also presented. Although the SLAM algorithm without feature selection criterion has shown the smallest positioning and mapping errors in an off-line execution of the SLAM algorithm, it used all the information available, whereas the EIF–SLAM with feature selection approach had used only the two most significant features according to
Section 2.2 without compromising the consistency of the estimation process nor the coherency of the map reconstruction.
Despite the fact that in this work the SLAM algorithm was based on point-based features, the selection criterion proposed herein is independent from the nature of the features used. In addition, the number of the most significant features to be used in the correction stage of the SLAM algorithm depends on the design criterion.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}