by
Weijun Tian 1 , Jinhua Zhang 1, Kuiyue Zhou 1, Zhirui Wang 2, Ruina Dang 2, Lei Jiang 2, Ju Wang 3 and Qian Cong 1,*
, Jinhua Zhang 1, Kuiyue Zhou 1, Zhirui Wang 2, Ruina Dang 2, Lei Jiang 2, Ju Wang 3 and Qian Cong 1,*
, Jinhua Zhang 1, Kuiyue Zhou 1, Zhirui Wang 2, Ruina Dang 2, Lei Jiang 2, Ju Wang 3 and Qian Cong 1,*
1
Key Laboratory of Bionic Engineering (Ministry of Education, China), Jilin University, Changchun 130022, China
2
North-Vehicle Research, Fengtai District, Beijing 100072, China
3
Pujiang Agricultural and Rural Bureau, Chengdu 322200, China
Biomimetics 2022, 7(4), 220; https://doi.org/10.3390/biomimetics7040220 - 30 Nov 2022
Cited by 2 | Viewed by 2921
Abstract
The study aimed to assess the gait adjustment techniques of limbs on different slopes and investigate the relationship between forelimb and hindlimb kinetics and the center of mass (COM) during the uphill movement of a specific Boer goat using a pressure-sensitive walkway (PSW).
[...] Read more.
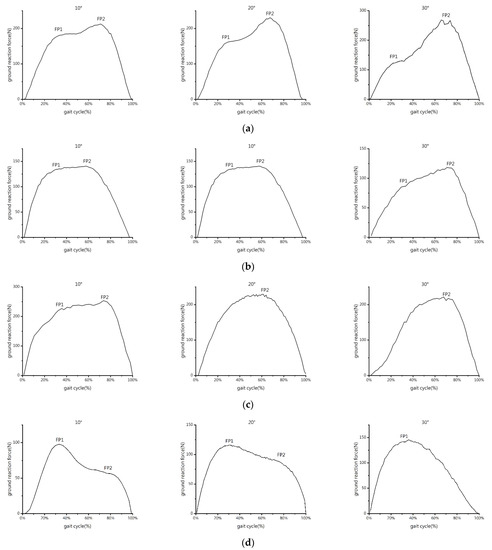
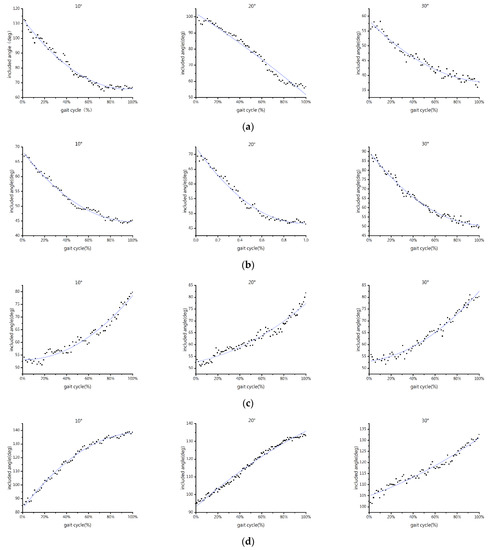
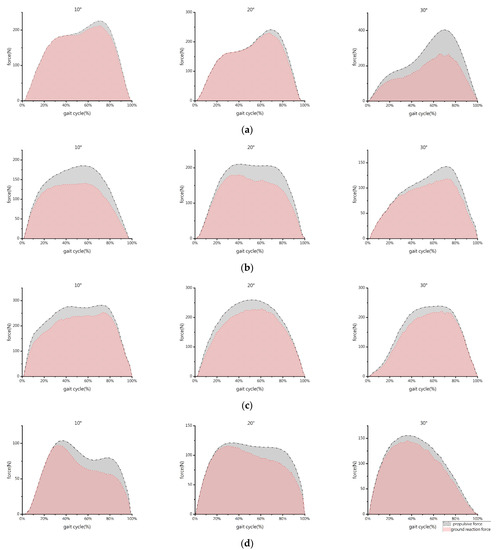
The study aimed to assess the gait adjustment techniques of limbs on different slopes and investigate the relationship between forelimb and hindlimb kinetics and the center of mass (COM) during the uphill movement of a specific Boer goat using a pressure-sensitive walkway (PSW). During the uphill and downhill movements at a comfortable walking speed, we measured the ground reaction force (GRF) of the forelimbs and hindlimbs on the slope, the change in the included angle of the propulsive force direction of the forelimbs and hindlimbs, and the impulse relationship between GRF and propulsive force. According to the study, since the forelimbs of the goat were nearer the COM, they were primarily adjusted during the movement on the slope. By lowering the initial included angle of the propulsive force and the angle variation range, the forelimbs and hindlimbs could walk steadily. The forelimbs and hindlimbs exhibited completely different adjustment strategies during uphill and downhill movements. In particular, the forelimbs performed braking and the hindlimbs performed driving. In addition, we discovered that the goat altered its adjustment strategy when climbing the steep slope. All findings of this study indicate the need to understand the gait adjustment mode of the Boer goat during movement on the slope to thoroughly comprehend the driving strategy of quadrupeds with the ability to walk on specialized terrains.
Full article
(This article belongs to the Special Issue Bio-Inspired Design and Control of Legged Robot)
▼
Show Figures
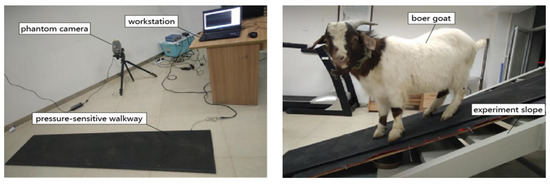
Figure 1









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}