Mosaicking Opportunistically Acquired Very High-Resolution Helicopter-Borne Images over Drifting Sea Ice Using COTS Sensors



Abstract
:1. Introduction
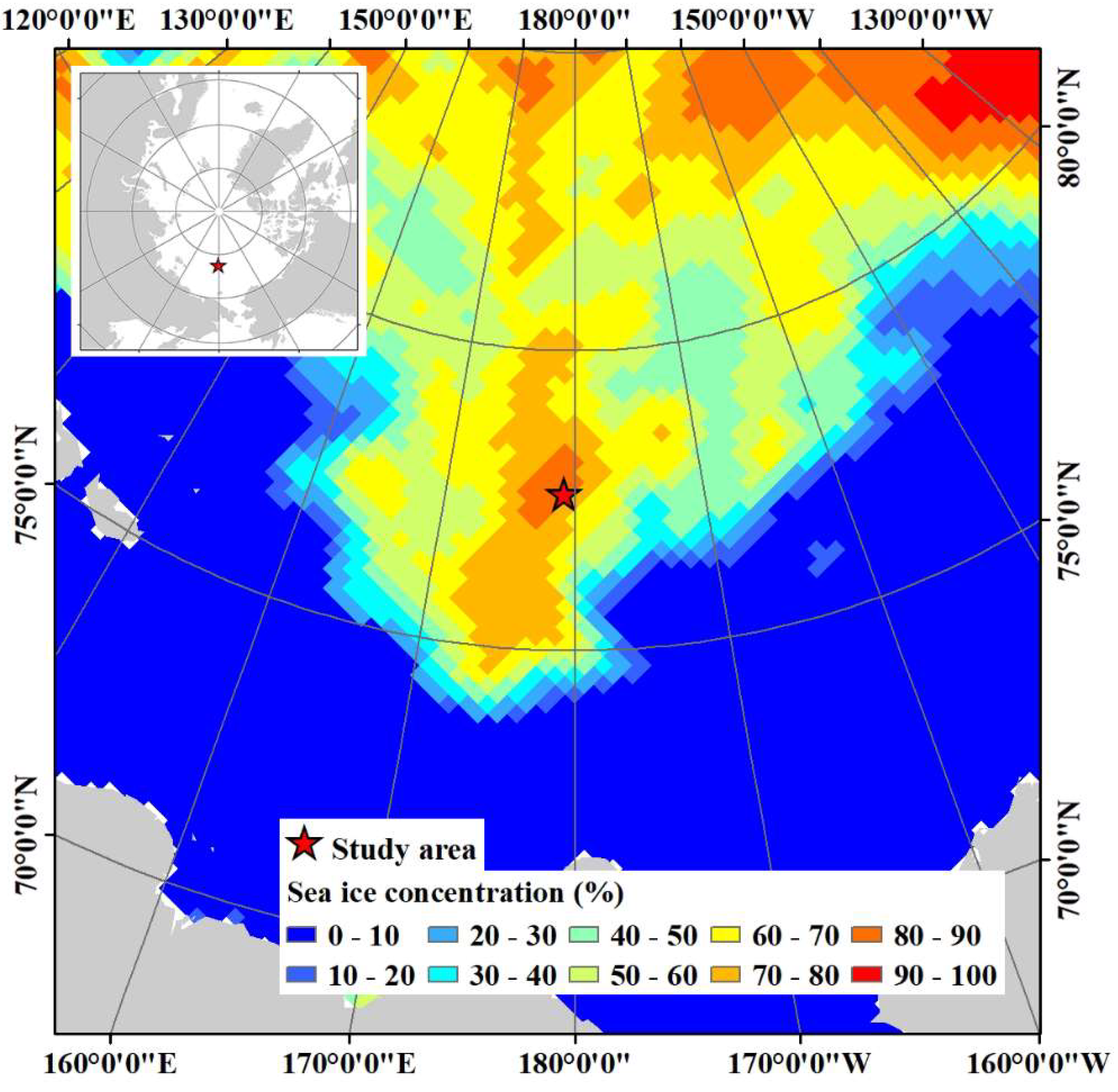
2. Description of Study Area
3. Materials and Methods
3.1. Installation of Imaging Equipment on Helicopter
3.2. Preprocessing of Acquired Helicopter-Borne Images
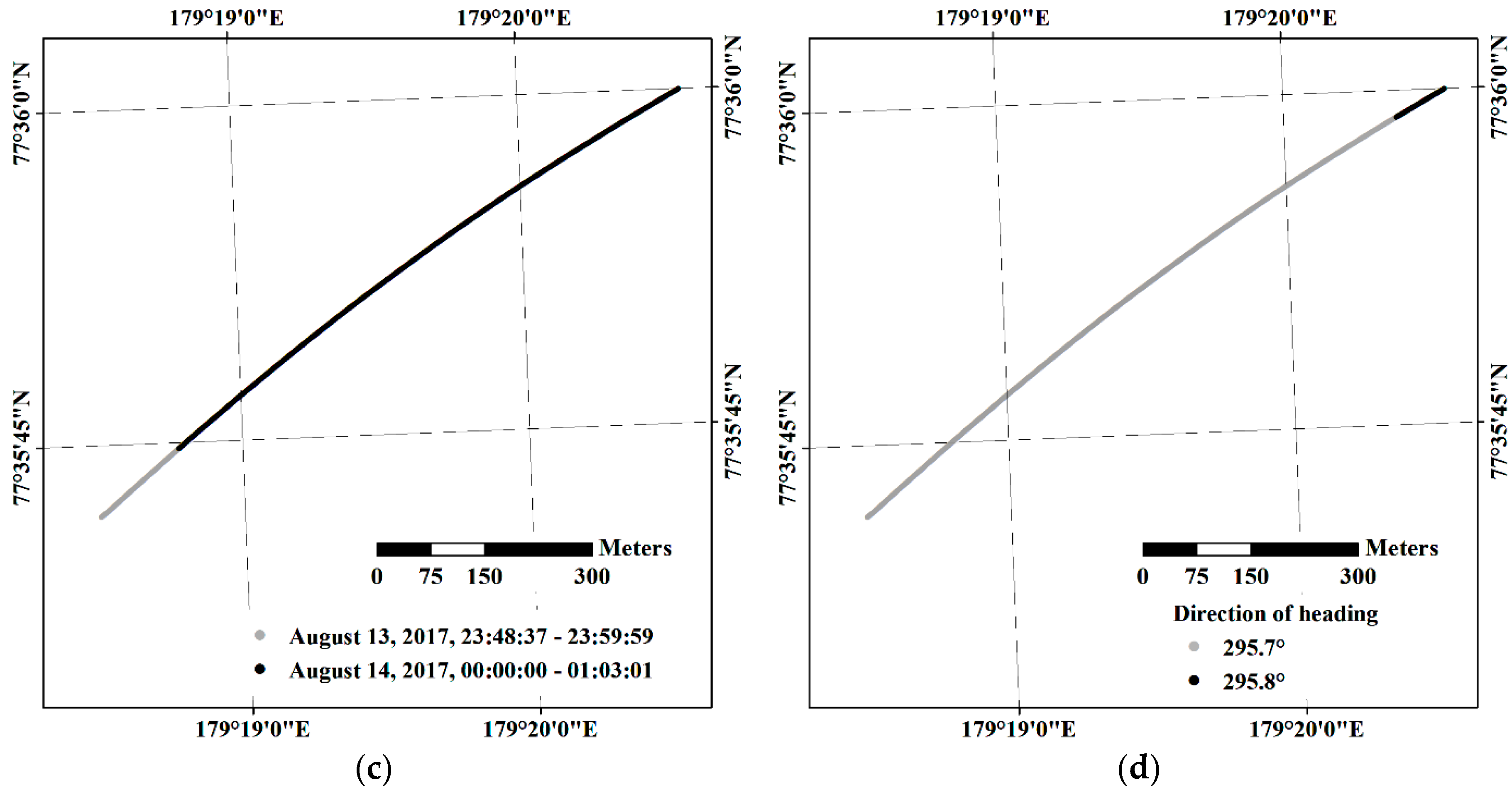
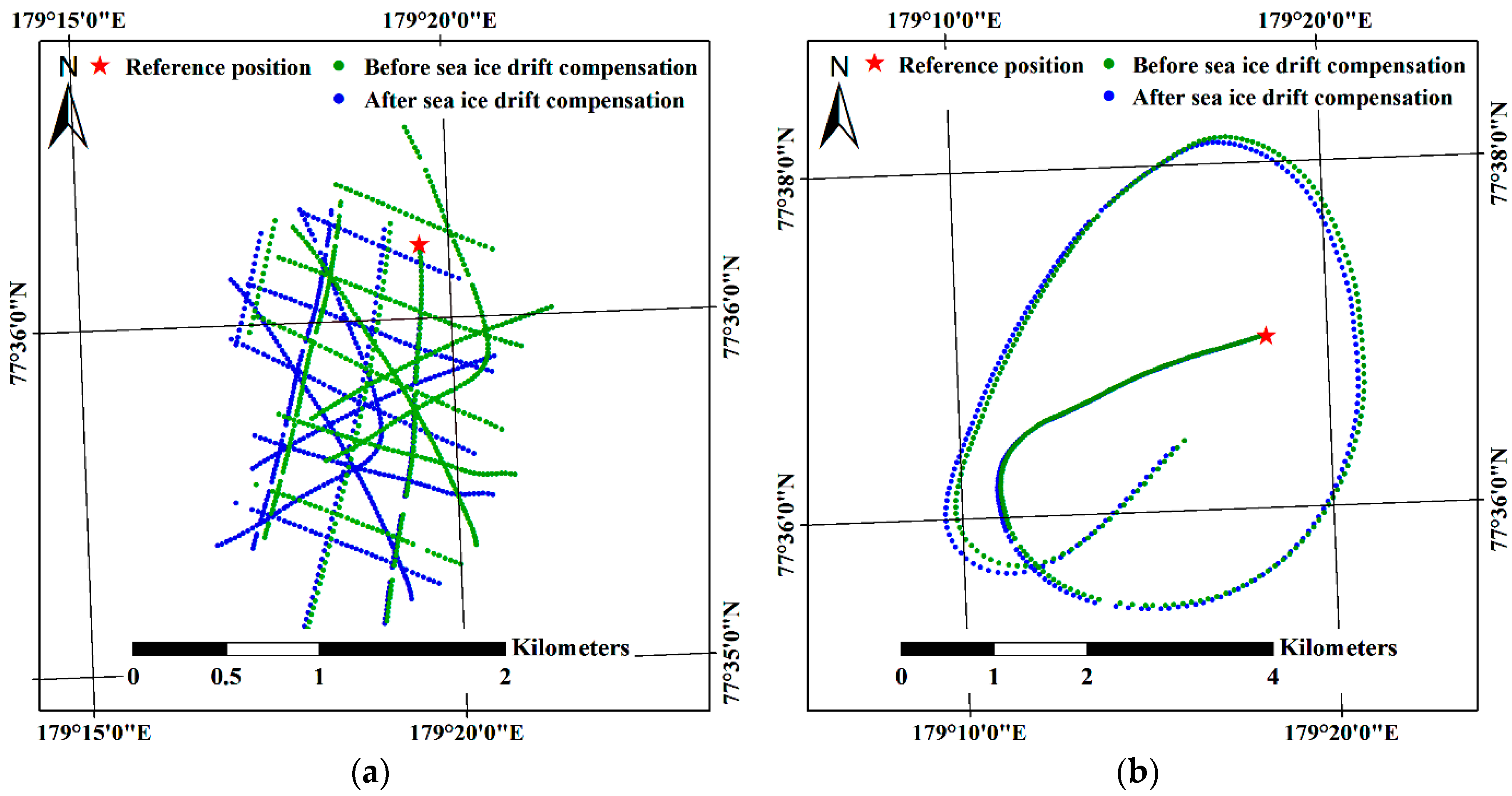
3.3. Compensation of the Effect from Sea Ice Drift in Imaging Locations
3.4. Image Mosaicking and Accuracy Assessment
4. Results
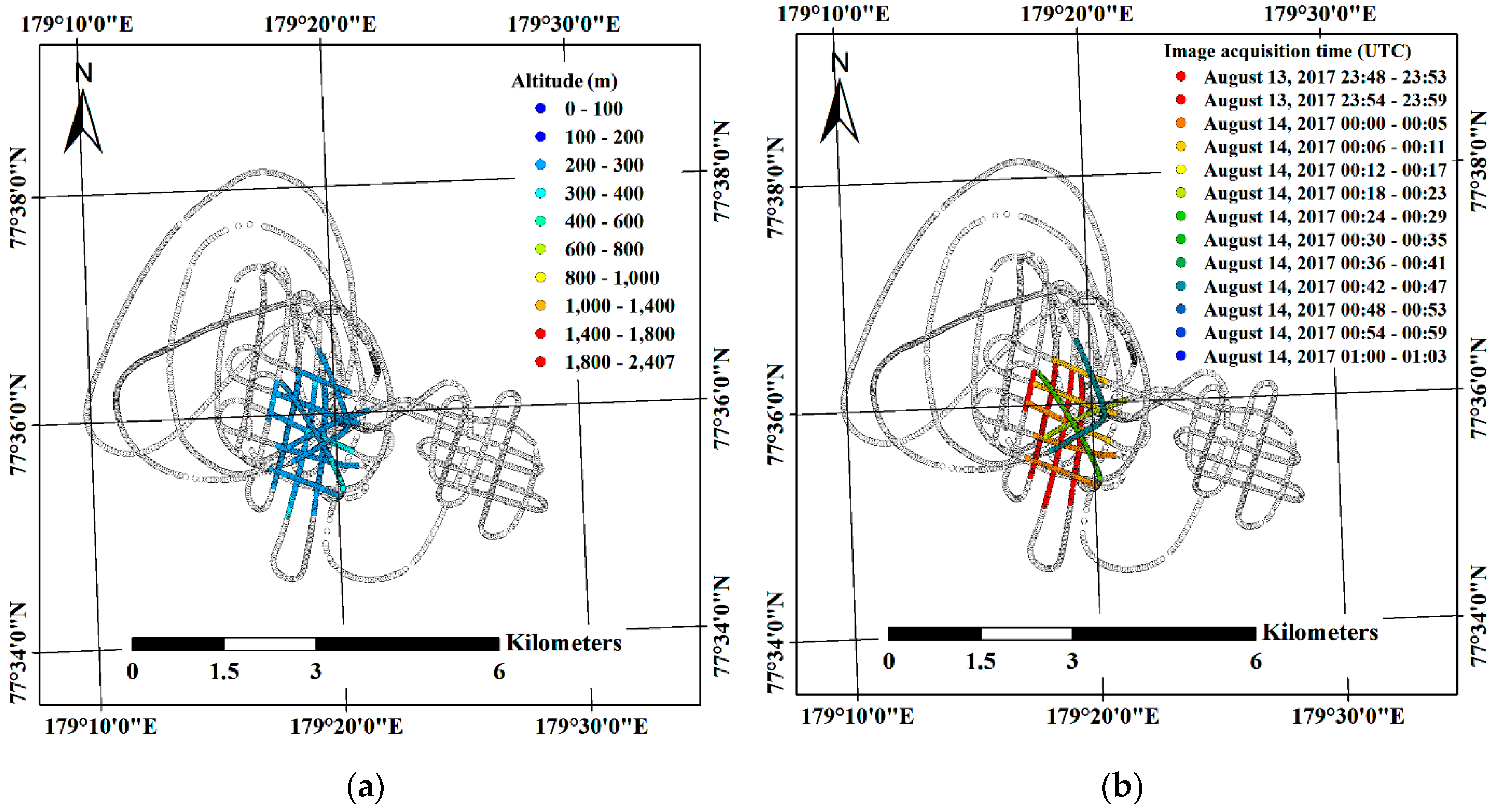
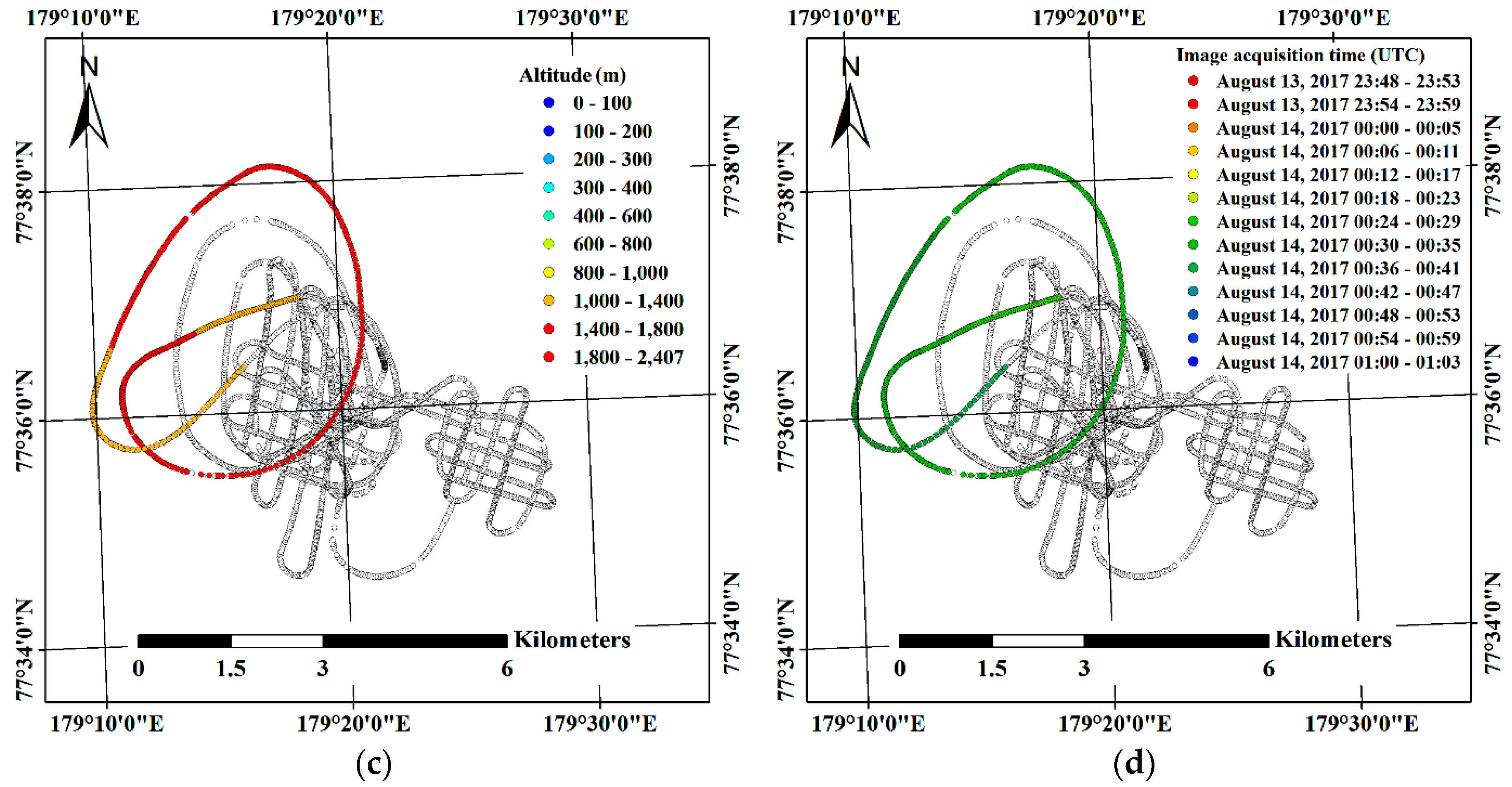
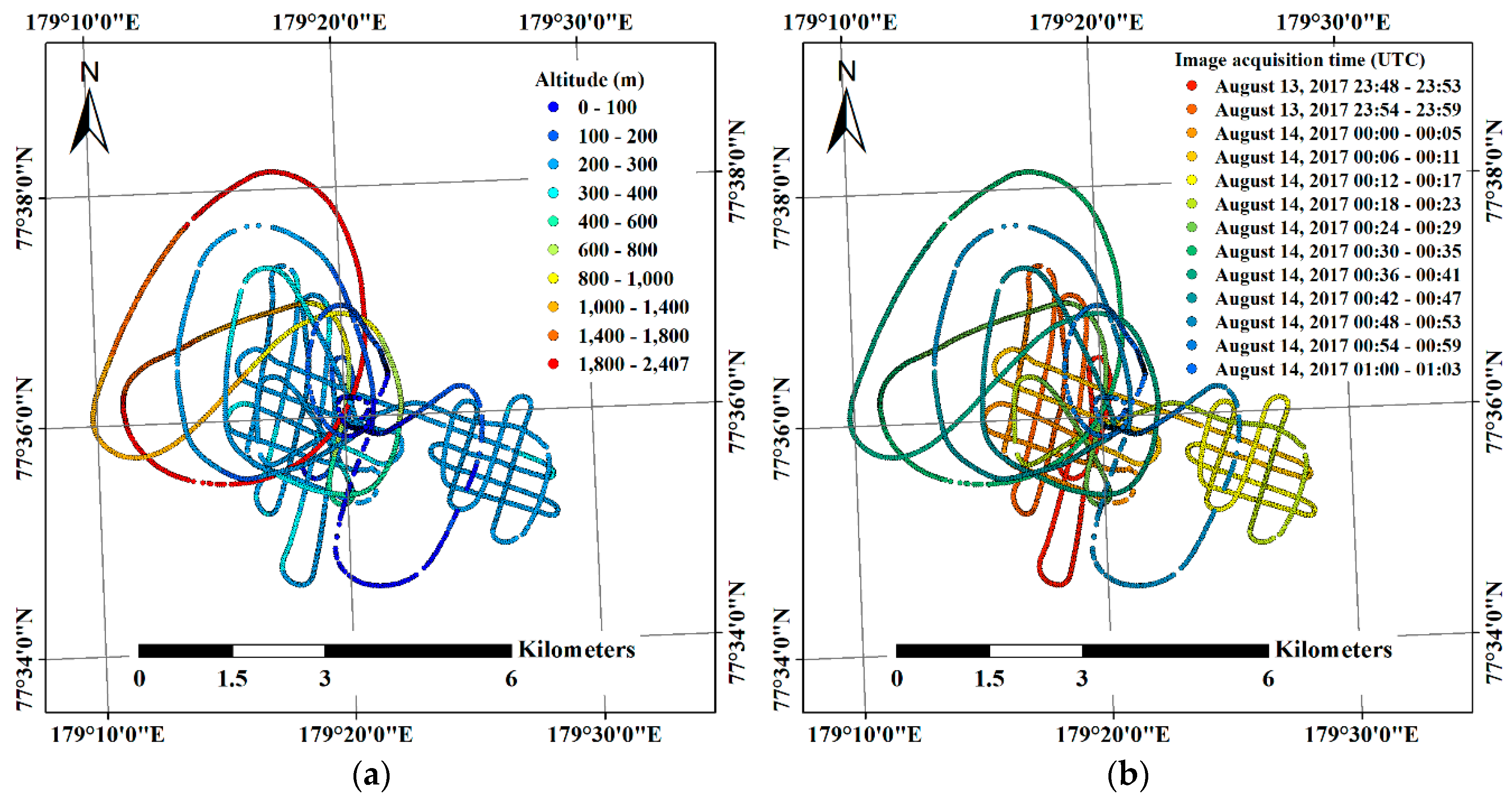
4.1. Results of Helicopter-Borne Image Acquisition
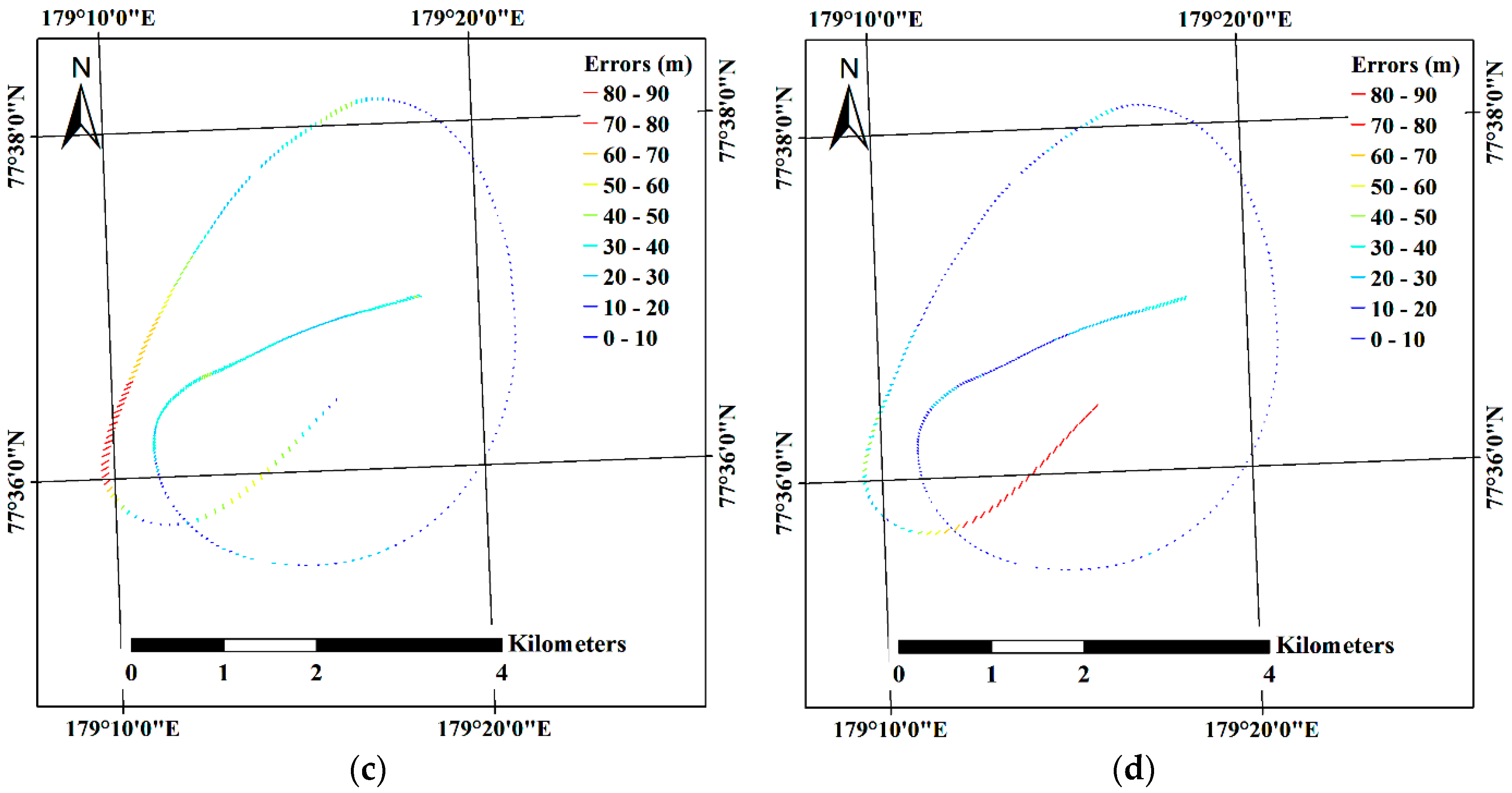
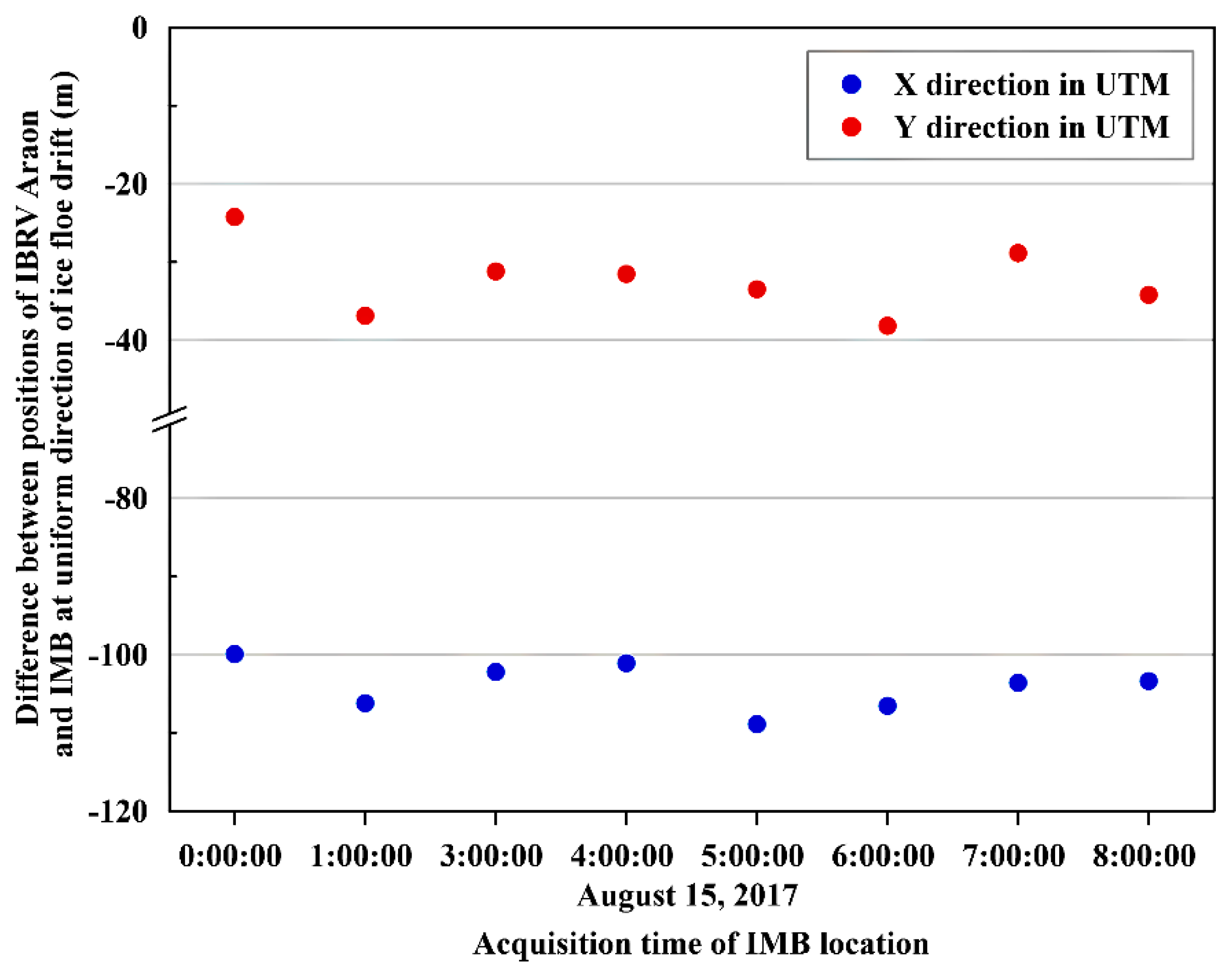
4.2. Compensation of the Effect from Sea Ice Drift
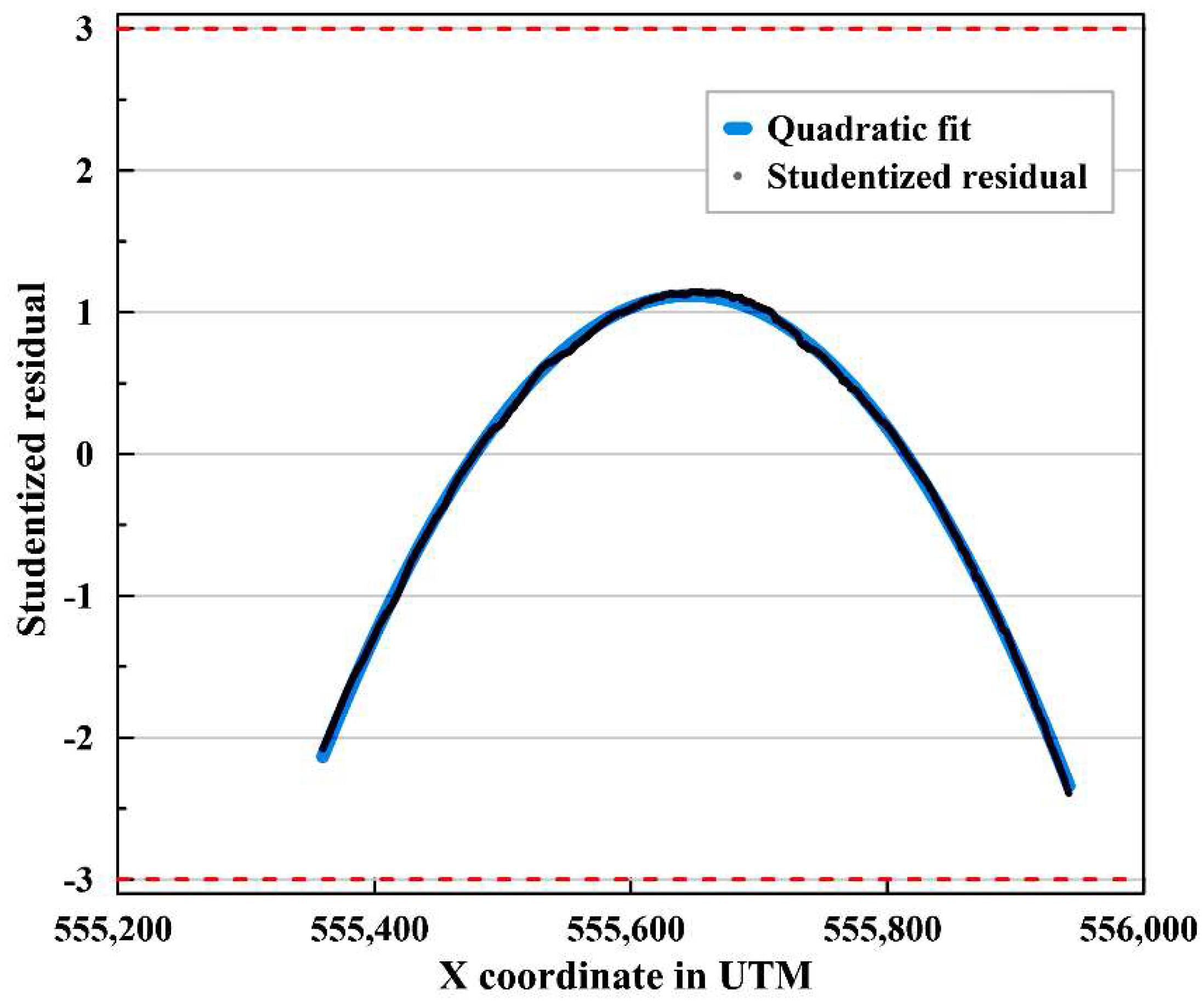
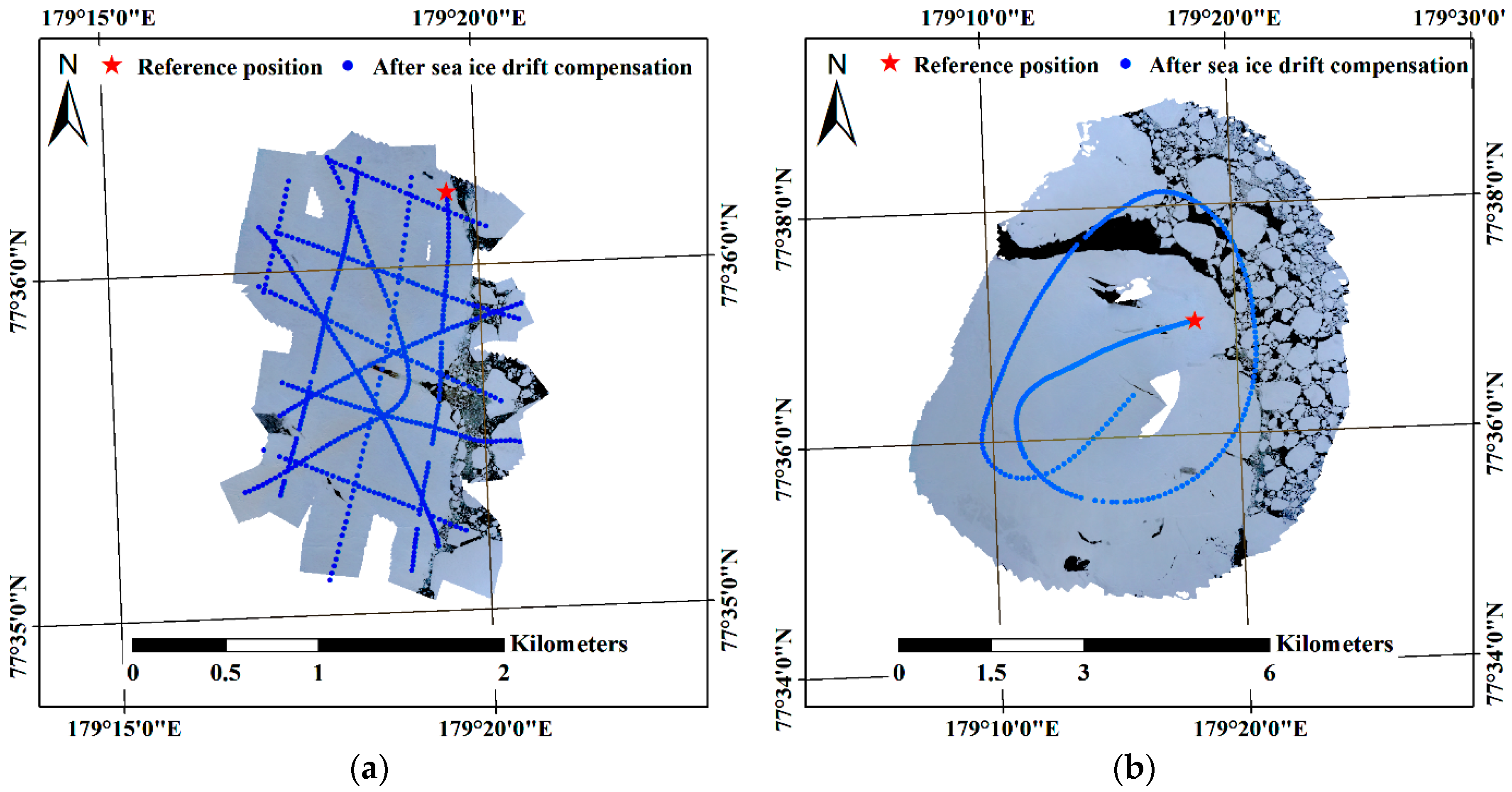
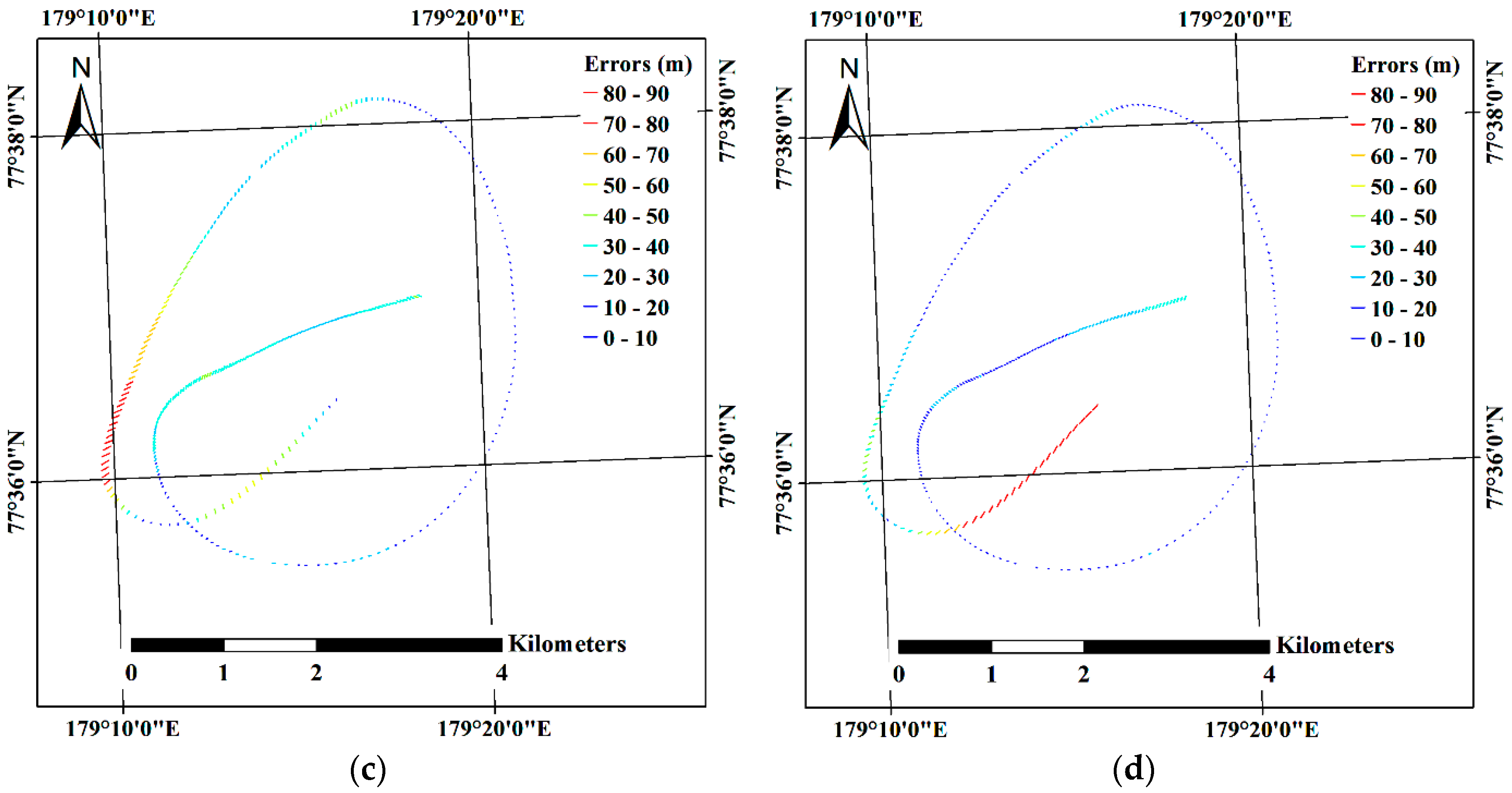
4.3. Image Mosaicking Results and Evaluation of Errors
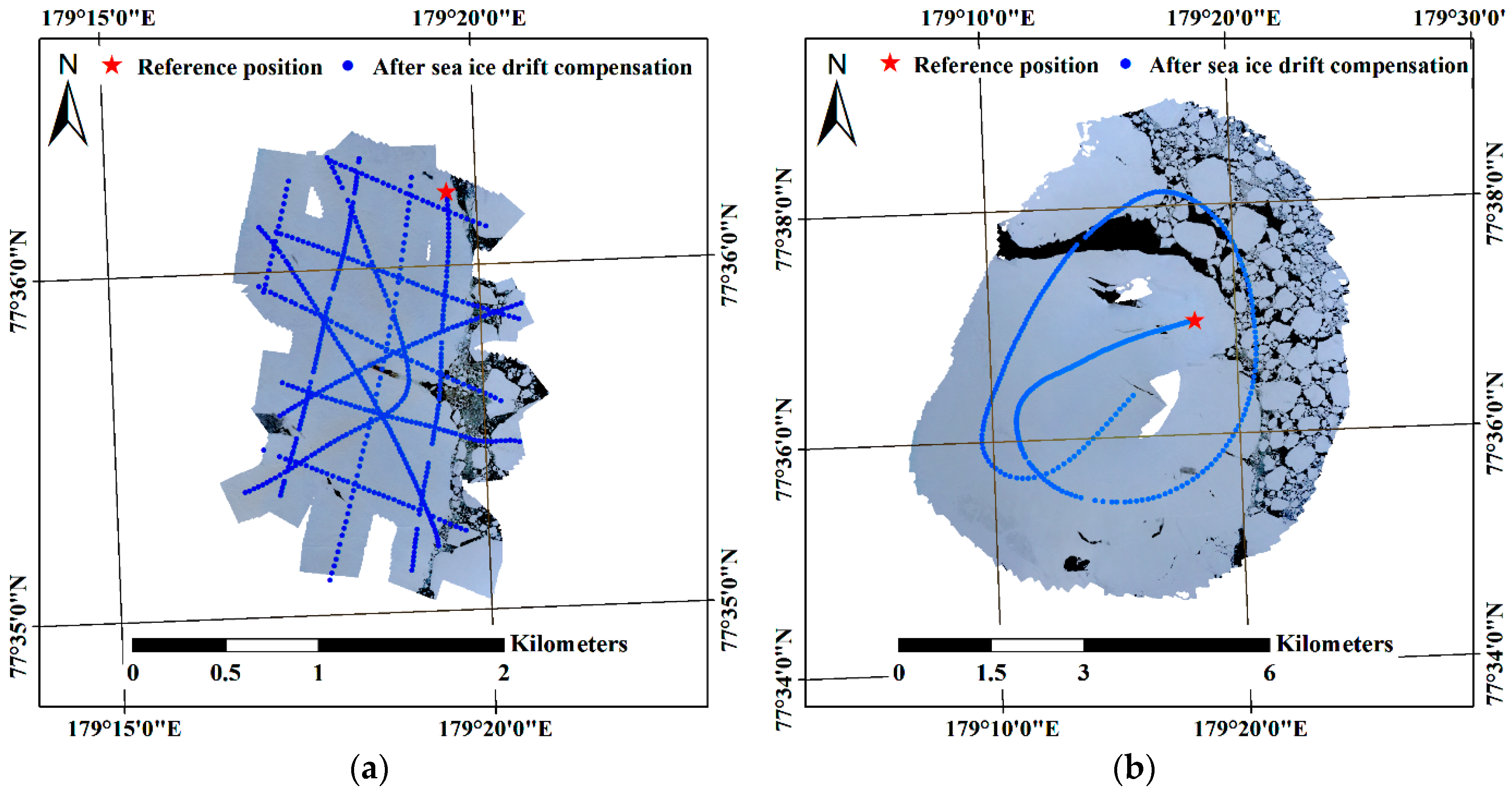
4.4. Comparison between Helicopter-Borne Mosaicked VHR Image and Satellite SAR Image
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Hall, R.J.; Hughes, N.; Wadhams, P. A systematic method of obtaining ice concentration measurements from ship-based observations. Cold Reg. Sci. Technol. 2002, 34, 97–102. [Google Scholar] [CrossRef]
- Massom, R.A.; Worby, A.; Lytle, V.; Markus, T.; Allison, I.; Scambos, T.; Enomoto, H.; Tamura, T.; Tateyama, K.; Haran, T.; et al. ARISE (Antarctic Remote Ice Sensing Experiment) in the East 2003: Validation of satellite-derived sea-ice data products. Ann. Glaciol. 2006, 44, 288–296. [Google Scholar] [CrossRef]
- Baldwin, D.; Tschudi, M.; Pacifici, F.; Liu, Y. Validation of Suomi-NPP VIIRS sea ice concentration with very high-resolution satellite and airborne camera imagery. ISPRS J. Photogramm. Remote Sens. 2017, 130, 122–138. [Google Scholar] [CrossRef]
- Li, L.; Ke, C.; Xie, H.; Lei, R.; Tao, A. Aerial observations of sea ice and melt ponds near the North Pole during CHINARE2010. Acta Oceanol. Sin. 2017, 36, 64–72. [Google Scholar] [CrossRef]
- Divine, D.V.; Pedersen, C.A.; Karlsen, T.I.; Aas, H.F.; Granskog, M.A.; Hudson, S.R.; Gerland, S. Photogrammetric retrieval and analysis of small scale sea ice topography during summer melt. Cold Reg. Sci. Technol. 2016, 129, 77–84. [Google Scholar] [CrossRef]
- Yitayew, T.G.; Dierking, W.; Divine, D.V.; Eltoft, T.; Ferro-Famil, L.; Rosel, A.; Negrel, J. Validation of Sea-Ice Topographic Heights Derived from TanDEM-X Interferometric SAR Data With Results From Laser Profiler and Photogrammetry. IEEE Trans. Geosci. Remote Sens. 2018, 56, 6504–6520. [Google Scholar] [CrossRef]
- Rösel, A.; Kaleschke, L.; Birnbaum, G. Melt ponds on Arctic sea ice determined from MODIS satellite data using an artificial neural network. Cryosphere 2012, 6, 431–446. [Google Scholar] [CrossRef] [Green Version]
- Istomina, L.; Heygster, G.; Huntemann, M.; Schwarz, P.; Birnbaum, G.; Scharien, R.; Polashenski, C.; Perovich, D.; Zege, E.; Malinka, A.; et al. Melt pond fraction and spectral sea ice albedo retrieval from MERIS data—Part 1: Validation against in situ, aerial, and ship cruise data. Cryosphere 2015, 9, 1551–1566. [Google Scholar] [CrossRef]
- Lu, X.; Hu, Y.; Liu, Z.; Rodier, S.; Vaughan, M.; Lucker, P.; Trepte, C.; Pelon, J. Observations of Arctic snow and sea ice cover from CALIOP lidar measurements. Remote Sens. Environ. 2017, 194, 248–263. [Google Scholar] [CrossRef]
- Perovich, D.K. Seasonal evolution of the albedo of multiyear Arctic sea ice. J. Geophys. Res. 2002, 107, SHE 20-1–SHE 20-13. [Google Scholar] [CrossRef] [Green Version]
- Petrich, C.; Eicken, H.; Polashenski, C.M.; Sturm, M.; Harbeck, J.P.; Perovich, D.K.; Finnegan, D.C. Snow dunes: A controlling factor of melt pond distribution on Arctic sea ice. J. Geophys. Res. Ocean. 2012, 117. [Google Scholar] [CrossRef] [Green Version]
- Polashenski, C.; Perovich, D.; Courville, Z. The mechanisms of sea ice melt pond formation and evolution. J. Geophys. Res. Ocean. 2012, 117. [Google Scholar] [CrossRef] [Green Version]
- Balsa-Barreiro, J.; Lerma, J.L. Empirical study of variation in lidar point density over different land covers. Int. J. Remote Sens. 2014, 35, 3372–3383. [Google Scholar] [CrossRef]
- Farrell, S.L.; Kurtz, N.; Connor, L.N.; Elder, B.C.; Leuschen, C.; Markus, T.; McAdoo, D.C.; Panzer, B.; Richter-Menge, J.; Sonntag, J.G. A First Assessment of IceBridge Snow and Ice Thickness Data Over Arctic Sea Ice. IEEE Trans. Geosci. Remote Sens. 2012, 50, 2098–2111. [Google Scholar] [CrossRef]
- Assmy, P.; Ehn, J.K.; Fernandez-Mendez, M.; Hop, H.; Katlein, C.; Sundfjord, A.; Bluhm, K.; Daase, M.; Engel, A.; Fransson, A.; et al. Floating ice-algal aggregates below melting arctic sea ice. PLoS ONE 2013, 8, e76599. [Google Scholar] [CrossRef] [PubMed]
- Onana, V.-D.-P.; Kurtz, N.T.; Farrell, S.L.; Koenig, L.S.; Studinger, M.; Harbeck, J.P. A Sea-Ice Lead Detection Algorithm for Use with High-Resolution Airborne Visible Imagery. IEEE Trans. Geosci. Remote Sens. 2013, 51, 38–56. [Google Scholar] [CrossRef]
- Wang, X.; Guan, F.; Liu, J.; Xie, H.; Ackley, S. An improved approach of total freeboard retrieval with IceBridge Airborne Topographic Mapper (ATM) elevation and Digital Mapping System (DMS) images. Remote Sens. Environ. 2016, 184, 582–594. [Google Scholar] [CrossRef] [Green Version]
- Duncan, K.; Farrell, S.L.; Connor, L.N.; Richter-Menge, J.; Hutchings, J.K.; Dominguez, R. High-resolution airborne observations of sea-ice pressure ridge sail height. Ann. Glaciol. 2018, 59, 137–147. [Google Scholar] [CrossRef]
- Parmiggiani, F.; Moctezuma-Flores, M.; Wadhams, P.; Aulicino, G. Image processing for pancake ice detection and size distribution computation. Int. J. Remote Sens. 2018. [Google Scholar] [CrossRef]
- Alberello, A.; Onorato, M.; Bennetts, L.; Vichi, M.; Eayrs, C.; MacHutchon, K.; Toffoli, A. Brief communication: Pancake ice floe size distribution during the winter expansion of the Antarctic marginal ice zone. Cryosphere 2019, 13, 41–48. [Google Scholar] [CrossRef]
- Kurtz, N.T.; Farrell, S.L.; Studinger, M.; Galin, N.; Harbeck, J.P.; Lindsay, R.; Onana, V.D.; Panzer, B.; Sonntag, J.G. Sea ice thickness, freeboard, and snow depth products from Operation IceBridge airborne data. Cryosphere 2013, 7, 1035–1056. [Google Scholar] [CrossRef] [Green Version]
- Weissling, B.; Ackley, S.; Wagner, P.; Xie, H. EISCAM—Digital image acquisition and processing for sea ice parameters from ships. Cold Reg. Sci. Technol. 2009, 57, 49–60. [Google Scholar] [CrossRef]
- Inoue, J.; Curry, J.A.; Maslanik, J.A. Application of Aerosondes to Melt-Pond Observations over Arctic Sea Ice. J. Atmos. Ocean. Technol. 2008, 25, 327–334. [Google Scholar] [CrossRef]
- Tschudi, M.A.; Maslanik, J.A.; Perovich, D.K. Derivation of melt pond coverage on Arctic sea ice using MODIS observations. Remote Sens. Environ. 2008, 112, 2605–2614. [Google Scholar] [CrossRef]
- Haas, C.; Pfaffling, A.; Hendricks, S.; Rabenstein, L.; Etienne, J.-L.; Rigor, I. Reduced ice thickness in Arctic Transpolar Drift favors rapid ice retreat. Geophys. Res. Lett. 2008, 35. [Google Scholar] [CrossRef] [Green Version]
- Haas, C.; Lobach, J.; Hendricks, S.; Rabenstein, L.; Pfaffling, A. Helicopter-borne measurements of sea ice thickness, using a small and lightweight, digital EM system. J. Appl. Geophys. 2009, 67, 234–241. [Google Scholar] [CrossRef] [Green Version]
- Goebell, S. Comparison of coincident snow-freeboard and sea ice thickness profiles derived from helicopter-borne laser altimetry and electromagnetic induction sounding. J. Geophys. Res. 2011, 116. [Google Scholar] [CrossRef] [Green Version]
- Rabenstein, L.; Krumpen, T.; Hendricks, S.; Koeberle, C.; Haas, C.; Hoelemann, J.A. A combined approach of remote sensing and airborne electromagnetics to determine the volume of polynya sea ice in the Laptev Sea. Cryosphere Discuss. 2013, 7, 441–473. [Google Scholar] [CrossRef]
- Hendricks, S.; Gerland, S.; Smedsrud, L.H.; Haas, C.; Pfaffhuber, A.A.; Nilsen, F. Sea-ice thickness variability in Storfjorden, Svalbard. Ann. Glaciol. 2017, 52, 61–68. [Google Scholar] [CrossRef]
- Kern, S.; Gade, M.; Haas, C.; Pfaffling, A. Retrieval of thin-ice thickness using the L-band polarization ratio measured by the helicopter-borne scatterometer Heliscat. Ann. Glaciol. 2006, 44, 275–280. [Google Scholar] [CrossRef] [Green Version]
- Girod, L.; Nuth, C.; Kääb, A.; Etzelmüller, B.; Kohler, J. Terrain changes from images acquired on opportunistic flights by SfM photogrammetry. Cryosphere 2017, 11, 827–840. [Google Scholar] [CrossRef] [Green Version]
- Johansson, A.M.; King, J.A.; Doulgeris, A.P.; Gerland, S.; Singha, S.; Spreen, G.; Busche, T. Combined observations of Arctic sea ice with near-coincident colocated X-band, C-band, and L-band SAR satellite remote sensing and helicopter-borne measurements. J. Geophys. Res. Ocean. 2017, 122, 669–691. [Google Scholar] [CrossRef]
- King, J.; Skourup, H.; Hvidegaard, S.M.; Rösel, A.; Gerland, S.; Spreen, G.; Polashenski, C.; Helm, V.; Liston, G.E. Comparison of Freeboard Retrieval and Ice Thickness Calculation From ALS, ASIRAS, and CryoSat-2 in the Norwegian Arctic to Field Measurements Made During the N-ICE2015 Expedition. J. Geophys. Res. Ocean. 2018, 123, 1123–1141. [Google Scholar] [CrossRef] [Green Version]
- Cavalieri, D.; Parkinson, C.; Gloersen, P.; Zwally, H.J. Sea Ice Concentrations from Nimbus-7 SMMR and DMSP SSM/I-SSMIS Passive Microwave Data; Version 1; NASA DAAC at the National Snow and Ice Data Center: Boulder, CO, USA, 1996; Available online: http://dx.doi.org/10.5067/8GQ8LZQVL0VL (accessed on 6 May 2018).
- Avellar, G.S.; Pereira, G.A.; Pimenta, L.C.; Iscold, P. Multi-UAV Routing for Area Coverage and Remote Sensing with Minimum Time. Sensors 2015, 15, 27783–27803. [Google Scholar] [CrossRef] [Green Version]
- Little, T.A. Establishing Acceptance Criteria for Analytical Methods. Biopharm. Int. 2016, 29, 44–48. [Google Scholar]
- Lindsay, R.; Stern, H. The RADARSAT geophysical processor system: Quality of sea ice trajectory and deformation estimates. J. Atmos. Ocean. Technol. 2003, 20, 1333–1347. [Google Scholar] [CrossRef]
- Hyun, C.U.; Kim, H.C. A Feasibility Study of Sea Ice Motion and Deformation Measurements Using Multi-Sensor High-Resolution Optical Satellite Images. Remote Sens. 2017, 9, 930. [Google Scholar] [CrossRef]
- Javernick, L.; Brasington, J.; Caruso, B. Modeling the topography of shallow braided rivers using Structure-from-Motion photogrammetry. Geomorphology 2014, 213, 166–182. [Google Scholar] [CrossRef]
- Leon, J.X.; Roelfsema, C.M.; Saunders, M.I.; Phinn, S.R. Measuring coral reef terrain roughness using ‘Structure-from-Motion’ close-range photogrammetry. Geomorphology 2015, 242, 21–28. [Google Scholar] [CrossRef]
- Nolan, M.; Larsen, C.; Sturm, M. Mapping snow depth from manned aircraft on landscape scales at centimeter resolution using structure-from-motion photogrammetry. Cryosphere 2015, 9, 1445–1463. [Google Scholar] [CrossRef]
- Piermattei, L.; Carturan, L.; Guarnieri, A. Use of terrestrial photogrammetry based on structure-from-motion for mass balance estimation of a small glacier in the Italian alps. Earth Surf. Process. Landf. 2015, 40, 1791–1802. [Google Scholar] [CrossRef]
- Agisoft LLC. AgiSoft PhotoScan User Manual; Professional Edition v.1.4; Agisoft LLC: St. Petersburg, Russia, 2018. [Google Scholar]
- Lee, J.-S. Refined filtering of image noise using local statistics. Comput. Gr. Image Process. 1981, 15, 380–389. [Google Scholar] [CrossRef] [Green Version]
- Ressel, R.; Singha, S.; Lehner, S.; Rösel, A.; Spreen, G. Investigation into Different Polarimetric Features for Sea Ice Classification Using X-Band Synthetic Aperture Radar. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 3131–3143. [Google Scholar] [CrossRef] [Green Version]
- Breit, H.; Fritz, T.; Balss, U.; Lachaise, M.; Niedermeier, A.; Vonavka, M. TerraSAR-X SAR Processing and Products. IEEE Trans. Geosci. Remote Sens. 2010, 48, 727–740. [Google Scholar] [CrossRef]
- Zitova, B.; Flusser, J. Image registration methods: A survey. Image Vis. Comput. 2003, 21, 977–1000. [Google Scholar] [CrossRef]
- Liu, Y.; Zheng, X.; Ai, G.; Zhang, Y.; Zuo, Y. Generating a High-Precision True Digital Orthophoto Map Based on UAV Images. ISPRS Int. J. Geo-Inf. 2018, 7. [Google Scholar] [CrossRef]
- Martínez-Carricondo, P.; Agüera-Vega, F.; Carvajal-Ramírez, F.; Mesas-Carrascosa, F.-J.; García-Ferrer, A.; Pérez-Porras, F.-J. Assessment of UAV-photogrammetric mapping accuracy based on variation of ground control points. Int. J. Appl. Earth Obs. Geoinf. 2018, 72, 1–10. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Helicopter-Borne Imaging Setup | Specifications |
|---|---|
| Digital camera | Canon EOS M6 |
| Image acquisition interval | 1 s |
| Imaging mode | Aperture priority mode |
| Sensor | 24 mega-pixel Advanced Photo System type-C (APS-C) |
| Focal length | 22 mm (35 mm equivalent focal length to full frame sensor) |
| Aperture | F11 |
| Shutter speed | Varies between 1/1000 and 1/3200 |
| ISO | 400 |
| Satellite Dataset | Specifications |
|---|---|
| Imaging mode | StripMap |
| Acquisition date and time | 16 August 2017 18:49:52 (UTC) |
| Centre frequency | 9.65 GHz (X band) |
| Polarization | HH |
| Spatial resolution | 3 m |
| Swath width | 15 km |
| Helicopter-borne VHR Image Acquisition | Specifications |
|---|---|
| Number of acquired images | 4041 |
| Start time of image acquisition | 13 August 2017 23:48:37.65 (UTC) |
| End time of image acquisition | 14 August 2017 01:03:00.10 (UTC) |
| Duration of image acquisition | 1 h 14 min 22.45 s |
| Altitude of imaging location | Up to 2407 m |
| Image Subset | Number of Images | Imaging Duration |
|---|---|---|
| Subset I | 664 | 55 min 38.75 s (13 August 2017 23:50:39.70–14 August 2017 00:46:18.45) |
| Subset II | 324 | 11 min 0 s (14 August 2017 00:27:47.15–14 August 2017 00:38:47.15) |
| Image Subset | Effect from Sea Ice Drift | X Error (m) | Y Error (m) | XY Error (m) | Z Error (m) | Total Error (m) |
|---|---|---|---|---|---|---|
| Subset I | Before compensation | 188.4 | 150.7 | 241.2 | 8.1 | 241.4 |
| After compensation | 33.5 | 36.5 | 49.6 | 5.5 | 49.9 | |
| Subset II | Before compensation | 26.5 | 24.4 | 36.0 | 13.7 | 38.5 |
| After compensation | 18.9 | 20.2 | 27.6 | 9.4 | 29.2 |
| No | UTM Coordinates of CPs in Mosaicked VHR Image | UTM Coordinates of CPs in SAR Image | Residuals after Transformation (m) | RMS Error (m) | |||
|---|---|---|---|---|---|---|---|
| X (m E) | Y (m N) | X (m E) | Y (m N) | X (m E) | Y (m N) | ||
| 1 | 550,987.0 | 8,625,212.1 | 550,800.3 | 8,625,026.1 | 0.0 | 1.7 | 1.7 |
| 2 | 551,569.4 | 8,622,003.6 | 551,762.8 | 8,621,946.2 | 1.3 | 0.8 | 1.5 |
| 3 | 552,215.5 | 8,621,645.7 | 552,440.4 | 8,621,672.7 | 1.2 | 0.2 | 1.2 |
| 4 | 551,888.9 | 8,622,821.1 | 551,973.2 | 8,622,784.8 | −2.7 | −1.9 | 3.3 |
| 5 | 550,237.3 | 8,621,463.4 | 550,518.8 | 8,621,253.3 | −0.5 | 0.0 | 0.5 |
| 6 | 548,945.4 | 8,625,968.4 | 548,704.8 | 8,625,518.4 | 0.6 | −0.6 | 0.9 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hyun, C.-U.; Kim, J.-H.; Han, H.; Kim, H.-c. Mosaicking Opportunistically Acquired Very High-Resolution Helicopter-Borne Images over Drifting Sea Ice Using COTS Sensors. Sensors 2019, 19, 1251. https://doi.org/10.3390/s19051251
Hyun C-U, Kim J-H, Han H, Kim H-c. Mosaicking Opportunistically Acquired Very High-Resolution Helicopter-Borne Images over Drifting Sea Ice Using COTS Sensors. Sensors. 2019; 19(5):1251. https://doi.org/10.3390/s19051251
Chicago/Turabian StyleHyun, Chang-Uk, Joo-Hong Kim, Hyangsun Han, and Hyun-cheol Kim. 2019. "Mosaicking Opportunistically Acquired Very High-Resolution Helicopter-Borne Images over Drifting Sea Ice Using COTS Sensors" Sensors 19, no. 5: 1251. https://doi.org/10.3390/s19051251