
A Comparative Study between NMPC and Baseline Feedback Controllers for UAV Trajectory Tracking

 ,
,  ,
,  ,
,  , and
, and
Abstract
:1. Introduction
1.1. Motivation
1.2. Related Work
1.2.1. Non-Predictive Controllers
1.2.2. Predictive Controllers
1.3. Contribution of This Work
- Differential Kinematics and Dynamic Formulation: this work develops the differential kinematics and dynamics formulation considering maneuverability velocities as the control input of the system because many commercial aerial vehicles are produced under this structure where the user does not have access to attitude control schemes. Thus, this formulation can be straightforwardly applied to another commercial platform with desired velocities as inputs of the system. To obtain the dynamic model of the system, this work used the formulation of Euler–Lagrange; additionally, to modify this model into the velocities space, it is necessary to introduce the concept of low-level PID in the mathematical formulation.
- Nonlinear Feedback Formulations: are generated by inversion of differential kinematics and dynamic compensation techniques. The design of these control structures was developed using the theory of nonlinear control and linear algebra, guaranteeing minimal computational time with asymptotically and robust behavior.
- NMPC Formulation: This work formulates the NMPC considering system and input constraints such as system dynamics, limits in control action, rate of change of control inputs, and a candidate Lyapunov function that guarantees the stability of the control structure. This work uses CasADI to solve the nonlinear optimization problem.
- Comparative Study: The experiments are carried out in simulations and real-world environments. The simulation experiments were performed under the commercial simulator of the DJI brand. On the other hand, real-world experiments were conducted using the DJI Matrice 100 platform, which was equipped with all the necessary hardware to run the controllers on the onboard computer. The agile trajectory selected to compare the performances of the controllers is the Lissajous; additionally, to guarantee a good comparison, this work considers low and high velocities through the reference signal where the aerodynamics effects, latency, and uncertainties are inevitable. Finally, with the comparative results is possible to show the benefits of each controller considering their predictive and non-predictive structures; the comparative consider the following metrics: tracking accuracy and average computational time.
2. Preliminary Materials
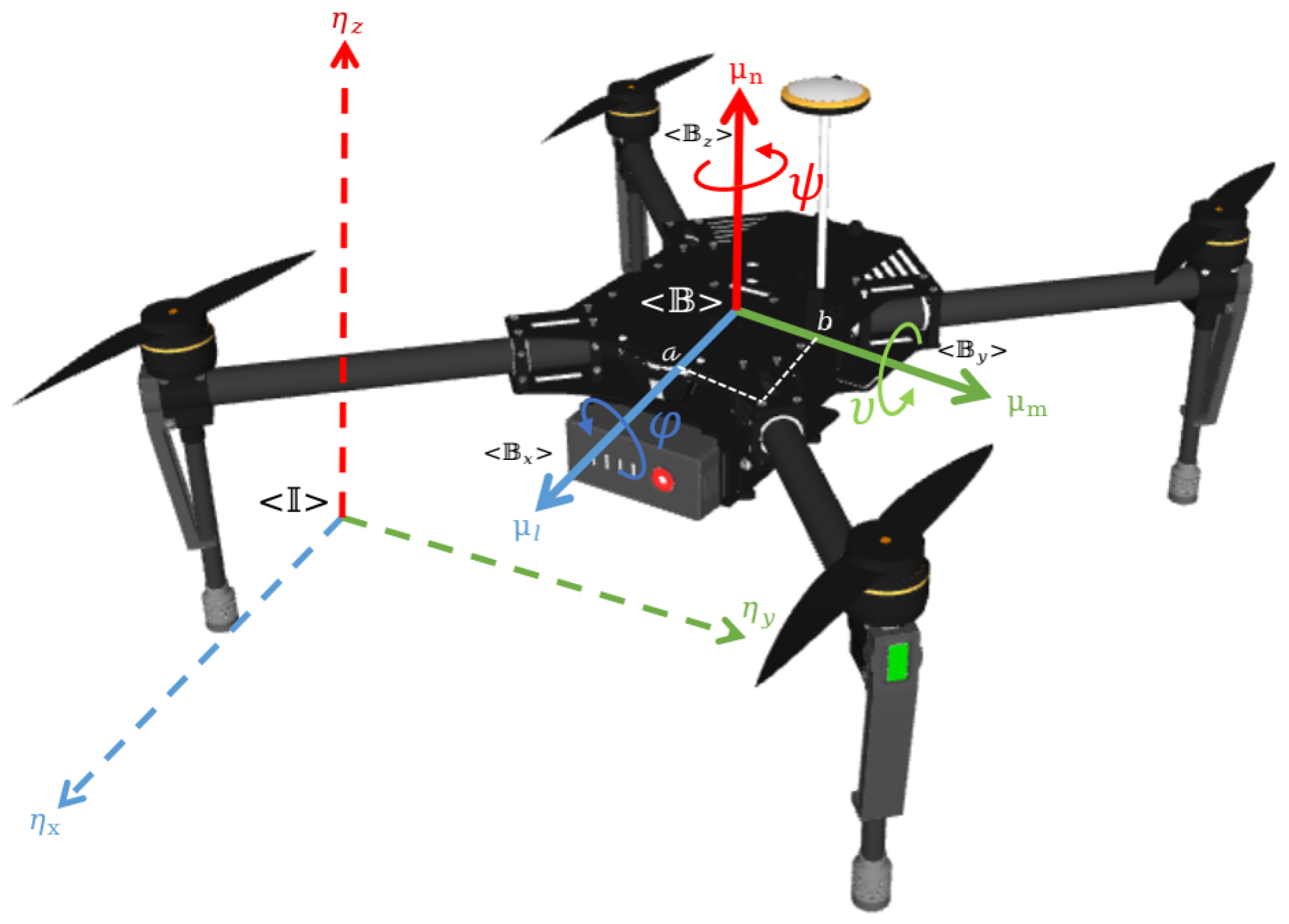
2.1. Kinematics Formulation
2.2. Quadrotor Dynamics
2.3. Simplified Dynamic Model Based on Maneuvering Velocities
2.4. Identification and Validation
3. Controllers Design
3.1. Kinematic Controller
Kinematic Controller Stability Analysis
3.2. Dynamic Controller
Dynamic Controller Stability Analysis
3.3. NMPC Controller
4. Results
4.1. Simulation Experiments Results
4.1.1. Inverse Differential Kinematics
4.1.2. Inverse Dynamic Compensation
4.1.3. Nonlinear Model Predictive Control
4.2. Comparative of Simulations Experiments
4.3. Real-World Experiments Results
4.3.1. Inverse Differential Kinematics
4.3.2. Inverse Dynamic Compensation
4.3.3. Nonlinear Model Predictive Control
4.4. Comparative of Real-World Experiments
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kendoul, F. Survey of advances in guidance, navigation, and control of unmanned rotorcraft systems. J. Field Robot. 2012, 29, 315–378. [Google Scholar] [CrossRef]
- Mu, B.; Zhang, K.; Shi, Y. Integral Sliding Mode Flight Controller Design for a Quadrotor and theA pplication in a Heterogeneous Multi-Agent System. IEEE Trans. Ind. Electron. 2017, 64, 9389–9398. [Google Scholar] [CrossRef]
- Liang, X.; Fang, Y.; Sun, N.; Lin, H. A novel energy-coupling-based hierarchical control approach for unmanned quadrotor transportation systems. IEEE ASME Trans. Mechatronics 2019, 24, 248–259. [Google Scholar] [CrossRef]
- Xu, L.X.; Ma, H.J.; Guo, D.; Xie, A.H.; Song, D.L. Backstepping Sliding-Mode and Cascade Active Disturbance Rejection Control for a Quadrotor UAV. IEEE ASME Trans. Mechatronics 2020, 25, 2743–2753. [Google Scholar] [CrossRef]
- Lu, Q.; Ren, B.; Parameswaran, S. Uncertainty and Disturbance Estimator-Based Global Trajectory Tracking Control for a Quadrotor. IEEE ASME Trans. Mechatronics 2020, 25, 1519–1530. [Google Scholar] [CrossRef]
- Serrano, M.E.; Gandolfo, D.C.; Scaglia, G.J. Trajectory tracking controller for unmanned helicopter under environmental disturbances. ISA Trans. 2020, 106, 171–180. [Google Scholar] [CrossRef]
- Ou, J.; Guo, X.; Lou, W.; Zhu, M. Quadrotor Autonomous Navigation in Semi-Known Environments Based on Deep Reinforcement Learning. Remote Sens. 2021, 13, 4330. [Google Scholar] [CrossRef]
- Xu, B.; Wang, W.; Falzon, G.; Kwan, P.; Guo, L.; Sun, Z.; Li, C. Livestock classification and counting in quadcopter aerial images using Mask R-CNN. Int. J. Remote Sens. 2020, 41, 8121–8142. [Google Scholar] [CrossRef] [Green Version]
- Bircher, A.; Kamel, M.; Alexis, K.; Burri, M.; Oettershagen, P.; Omari, S.; Mantel, T.; Siegwart, R. Three-dimensional coverage path planning via viewpoint resampling and tour optimization for aerial robots. Auton. Robot. 2016, 40, 1059–1078. [Google Scholar] [CrossRef]
- Bircher, A.; Kamel, M.; Alexis, K.; Oleynikova, H.; Siegwart, R. Receding horizon path planning for 3D exploration and surface inspection. Auton. Robot. 2018, 42, 291–306. [Google Scholar] [CrossRef]
- Loianno, G.; Scaramuzza, D. Special issue on future challenges and opportunities in vision-based drone navigation. J. Field Robot. 2020, 37, 495–496. [Google Scholar] [CrossRef]
- Rajendran, S.; Srinivas, S. Air taxi service for urban mobility: A critical review of recent developments, future challenges, and opportunities. Transp. Res. Part E Logist. Transp. Rev. 2020, 143, 102090. [Google Scholar] [CrossRef]
- Hanover, D.; Foehn, P.; Sun, S.; Kaufmann, E.; Scaramuzza, D. Performance, precision, and payloads: Adaptive nonlinear MPC for quadrotors. IEEE Robot. Autom. Lett. 2022, 7, 690–697. [Google Scholar] [CrossRef]
- Mohta, K.; Watterson, M.; Mulgaonkar, Y.; Liu, S.; Qu, C.; Makineni, A.; Saulnier, K.; Sun, K.; Zhu, A.; Delmerico, J.; et al. Fast, autonomous flight in GPS-denied and cluttered environments. J. Field Robot. 2018, 35, 101–120. [Google Scholar] [CrossRef]
- Foehn, P.; Kaufmann, E.; Romero, A.; Penicka, R.; Sun, S.; Bauersfeld, L.; Laengle, T.; Cioffi, G.; Song, Y.; Loquercio, A.; et al. Agilicious: Open-source and open-hardware agile quadrotor for vision-based flight. Sci. Robot. 2022, 7, 6259. [Google Scholar] [CrossRef] [PubMed]
- Loquercio, A.; Kaufmann, E.; Ranftl, R.; Müller, M.; Koltun, V.; Scaramuzza, D. Learning high-speed flight in the wild. Sci. Robot. 2021, 6. [Google Scholar] [CrossRef] [PubMed]
- Bicego, D.; Mazzetto, J.; Carli, R.; Farina, M.; Franchi, A. Nonlinear Model Predictive Control with Enhanced Actuator Model for Multi-Rotor Aerial Vehicles with Generic Designs. J. Intell. Robot. Syst. Theory Appl. 2020, 100, 1213–1247. [Google Scholar] [CrossRef]
- Foehn, P.; Romero, A.; Scaramuzza, D. Time-Optimal Planning for Quadrotor Waypoint Flight. Sci. Robot. 2021, 6. [Google Scholar] [CrossRef]
- Torrente, G.; Kaufmann, E.; Fohn, P.; Scaramuzza, D. Data-Driven MPC for Quadrotors. IEEE Robot. Autom. Lett. 2021, 6, 3769–3776. [Google Scholar] [CrossRef]
- Kamel, M.; Stastny, T.; Alexis, K.; Siegwart, R. Model predictive control for trajectory tracking of unmanned aerial vehicles using robot operating system. Stud. Comput. Intell. 2017, 707, 3–39. [Google Scholar] [CrossRef]
- Acosta Núñez, J.F.; Ortiz, V.H.A.; Peces, G.G.d.R.; Salas, J.G. Energy-Saver Mobile Manipulator Based on Numerical Methods. Electronics 2019, 8, 1100. [Google Scholar] [CrossRef] [Green Version]
- Ortiz, J.S.; Palacios-navarro, G.; Andaluz, V.H.; Recalde, L.F. Three-Dimensional Unified Motion Control of a Robotic Standing Wheelchair for Rehabilitation Purposes. Sensors 2021, 21, 3057. [Google Scholar] [CrossRef] [PubMed]
- Gandolfo, D.C.; Salinas, L.R.; Brandão, A.; Toibero, J.M. Stable Path-Following Control for a Quadrotor Helicopter Considering Energy Consumption. IEEE Trans. Control Syst. Technol. 2017, 25, 1423–1430. [Google Scholar] [CrossRef]
- Recalde, L.F.; Guevara, B.S.; Carvajal, C.P.; Andaluz, V.H.; Varela-Aldás, J.; Gandolfo, D.C. System Identification and Nonlinear Model Predictive Control with Collision Avoidance Applied in Hexacopters UAVs. Sensors 2022, 22, 4712. [Google Scholar] [CrossRef]
- Nascimento, T.P.; Saska, M. Position and attitude control of multi-rotor aerial vehicles: A survey. Annu. Rev. Control 2019, 48, 129–146. [Google Scholar] [CrossRef]
- Lee, H.; Kim, H.J. Trajectory tracking control of multirotors from modelling to experiments: A survey. Int. J. Control. Autom. Syst. 2017, 15, 281–292. [Google Scholar] [CrossRef]
- Martins, L.; Cardeira, C.; Oliveira, P. Linear Quadratic Regulator for Trajectory Tracking of a Quadrotor. IFAC-PapersOnLine 2019, 52, 176–181. [Google Scholar] [CrossRef]
- Shakeel, T.; Arshad, J.; Jaffery, M.H.; Rehman, A.U.; Eldin, E.T.; Ghamry, N.A.; Shafiq, M. A Comparative Study of Control Methods for X3D Quadrotor Feedback Trajectory Control. Appl. Sci. 2022, 12, 9254. [Google Scholar] [CrossRef]
- Chen, F.; Lei, W.; Zhang, K.; Tao, G.; Jiang, B. A novel nonlinear resilient control for a quadrotor UAV via backstepping control and nonlinear disturbance observer. Nonlinear Dyn. 2016, 2, 1281–1295. [Google Scholar] [CrossRef]
- Shen, Z.; Tsuchiya, T. Singular Zone in Quadrotor Yaw–Position Feedback Linearization. Drones 2022, 6, 84. [Google Scholar] [CrossRef]
- Martins, L.; Cardeira, C.; Oliveira, P. Feedback Linearization with Zero Dynamics Stabilization for Quadrotor Control. J. Intell. Robot. Syst. Theory Appl. 2021, 101, 1–17. [Google Scholar] [CrossRef]
- Kidambi, K.B.; Fermuller, C.; Aloimonos, Y.; Xu, H. Robust Nonlinear Control-Based Trajectory Tracking for Quadrotors under Uncertainty. IEEE Control Syst. Lett. 2021, 5, 2042–2047. [Google Scholar] [CrossRef]
- Bhargavapuri, M.; Sahoo, S.R.; Kothari, M.; Abhishek. Robust nonlinear control of a variable-pitch quadrotor with the flip maneuver. Control Eng. Pract. 2019, 87, 26–42. [Google Scholar] [CrossRef]
- Li, Z.; Ma, X.; Li, Y. Robust tracking control strategy for a quadrotor using RPD-SMC and RISE. Neurocomputing 2019, 331, 312–322. [Google Scholar] [CrossRef]
- Pliego-Jiménez, J. Quaternion-based adaptive control for trajectory tracking of quadrotor unmanned aerial vehicles. Int. J. Adapt. Control Signal Process. 2021, 35, 628–641. [Google Scholar] [CrossRef]
- Muthusamy, P.k.; Garratt, M.; Pota, H.R.; Muthusamy, R. Realtime Adaptive Intelligent Control System for Quadcopter UAV with Payload Uncertainties. IEEE Trans. Ind. Electron. 2021, 69, 1641–1653. [Google Scholar] [CrossRef]
- Guan, X.; Lou, S.; Li, H.; Tang, T. Intelligent control of quad-rotor aircrafts with a STM32 microcontroller using deep neural networks. Ind. Robot 2021, 48, 700–709. [Google Scholar] [CrossRef]
- Al-Mahturi, A.; Santoso, F.; Garratt, M.A.; Anavatti, S.G. Self-Learning in Aerial Robotics Using Type-2 Fuzzy Systems: Case Study in Hovering Quadrotor Flight Control. IEEE Access 2021, 9, 119520–119532. [Google Scholar] [CrossRef]
- Sun, C.; Liu, M.; Liu, C.; Feng, X.; Wu, H. An Industrial Quadrotor UAV Control Method Based on Fuzzy Adaptive Linear Active Disturbance Rejection Control. Electronics 2021, 10, 376. [Google Scholar] [CrossRef]
- Jiang, Z.; Lynch, A.F. Quadrotor motion control using deep reinforcement learning. J. Unmanned Veh. Syst. 2021, 9, 234–251. [Google Scholar] [CrossRef]
- Pi, C.H.; Ye, W.Y.; Cheng, S. Robust Quadrotor Control through Reinforcement Learning with Disturbance Compensation. Appl. Sci. 2021, 11, 3257. [Google Scholar] [CrossRef]
- Kamel, M.; Burri, M.; Siegwart, R. Linear vs Nonlinear MPC for Trajectory Tracking Applied to Rotary Wing Micro Aerial Vehicles. IFAC-PapersOnLine 2017, 50, 3463–3469. [Google Scholar] [CrossRef]
- Nguyen, H.; Kamel, M.; Alexis, K.; Siegwart, R. Model Predictive Control for Micro Aerial Vehicles: A Survey. In Proceedings of the 2021 European Control Conference, ECC 2021, Rotterdam, The Netherlands, 29 June–2 July 2020; pp. 1556–1563. [Google Scholar] [CrossRef]
- Gros, S.; Zanon, M.; Quirynen, R.; Bemporad, A.; Diehl, M. From linear to nonlinear MPC: Bridging the gap via the real-time iteration. Int. J. Control 2020, 93, 62–80. [Google Scholar] [CrossRef]
- Alexis, K.; Nikolakopoulos, G.; Tzes, A. On Trajectory Tracking Model Predictive Control of an Unmanned Quadrotor Helicopter Subject to Aerodynamic Disturbances. Asian J. Control 2014, 16, 209–224. [Google Scholar] [CrossRef]
- Andersson, J.A.; Gillis, J.; Horn, G.; Rawlings, J.B.; Diehl, M. CasADi: A software framework for nonlinear optimization and optimal control. Math. Program. Comput. 2019, 11, 1–36. [Google Scholar] [CrossRef]
- Kahn, M.E.; Roth, B. The Near-Minimum-Time Control Of Open-Loop Articulated Kinematic Chains. J. Dyn. Syst. Meas. Control 1971, 93, 164–172. [Google Scholar] [CrossRef]
- Lloyd, S.; Irani, R.; Ahmadi, M. A numeric derivation for fast regressive modeling of manipulator dynamics. Mech. Mach. Theory 2021, 156, 104149. [Google Scholar] [CrossRef]
- Herrera, D.; Roberti, F.; Carelli, R.; Andaluz, V.; Varela, J.; Ortiz, J.; Canseco, P. Modeling and Path-Following Control of a Wheelchair in Human-Shared Environments. Int. J. Humanoid Robot. 2018, 15, 1850010. [Google Scholar] [CrossRef]
- Bai, G.; Meng, Y.; Liu, L.; Luo, W.; Gu, Q.; Liu, L. Review and comparison of path tracking based on model predictive control. Electronics 2019, 8, 1077. [Google Scholar] [CrossRef] [Green Version]
- Romero, A.; Sun, S.; Foehn, P.; Scaramuzza, D. Model predictive contouring control for time-optimal quadrotor flight. IEEE Trans. Robot. 2022, 38, 3340–3356. [Google Scholar] [CrossRef]
- Amin, R.; Aijun, L.; Shamshirband, S. A review of quadrotor UAV: Control methodologies and performance evaluation. Int. J. Autom. Control 2016, 10, 87–103. [Google Scholar] [CrossRef]
- Tripathi, V.K.; Yogi, S.C.; Kamath, A.K.; Behera, L.; Verma, N.K.; Nahavandi, S. A Disturbance Observer-Based Intelligent Finite-Time Sliding Mode Flight Controller Design for an Autonomous Quadrotor. IEEE Syst. J. 2022, 16, 1649–1660. [Google Scholar] [CrossRef]
- Lindqvist, B.; Mansouri, S.S.; Agha-mohammadi, A.A.; Nikolakopoulos, G. Nonlinear MPC for collision avoidance and control of UAVs with dynamic obstacles. IEEE Robot. Autom. Lett. 2020, 5, 6001–6008. [Google Scholar] [CrossRef]
- Reinhold, J.; Baumann, H.; Meurer, T. Constrained-Differential-Kinematics-Decomposition-Based NMPC for Online Manipulator Control with Low Computational Costs. Robotics 2023, 12, 7. [Google Scholar] [CrossRef]
- Ju, F.; Zong, Y.; Zhuang, W.; Wang, Q.; Wang, L. Real-Time NMPC for Speed Planning of Connected Hybrid Electric Vehicles. Machines 2022, 10, 1129. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | |||
|---|---|---|---|
| Initial Positions [m]-[rad] | Initial Velocities [m/s]-[rad/s] | Reference Trajectory [m]-[rad] |
|---|---|---|
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| Kinematic | Dynamic | NMPC | |
|---|---|---|---|
| Avg. dt [ms] |
| Initial Positions [m]-[rad] | Initial Velocities [m/s]-[rad/s] | Reference Trajectory [m]-[rad] |
|---|---|---|
| Kinematic | Dynamic | NMPC | |
|---|---|---|---|
| Avg. dt [ms] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guevara, B.S.; Recalde, L.F.; Varela-Aldás, J.; Andaluz, V.H.; Gandolfo, D.C.; Toibero, J.M. A Comparative Study between NMPC and Baseline Feedback Controllers for UAV Trajectory Tracking. Drones 2023, 7, 144. https://doi.org/10.3390/drones7020144
Guevara BS, Recalde LF, Varela-Aldás J, Andaluz VH, Gandolfo DC, Toibero JM. A Comparative Study between NMPC and Baseline Feedback Controllers for UAV Trajectory Tracking. Drones. 2023; 7(2):144. https://doi.org/10.3390/drones7020144
Chicago/Turabian StyleGuevara, Bryan S., Luis F. Recalde, José Varela-Aldás, Victor H. Andaluz, Daniel C. Gandolfo, and Juan M. Toibero. 2023. "A Comparative Study between NMPC and Baseline Feedback Controllers for UAV Trajectory Tracking" Drones 7, no. 2: 144. https://doi.org/10.3390/drones7020144