
Enriching Roadside Safety Assessments Using LiDAR Technology: Disaggregate Collision-Level Data Fusion and Analysis


Abstract
:1. Introduction
2. Literature Review
2.1. Pole-Like Object Extraction from LiDAR
2.2. Data Sources in Previous Roadside Safety Assessments
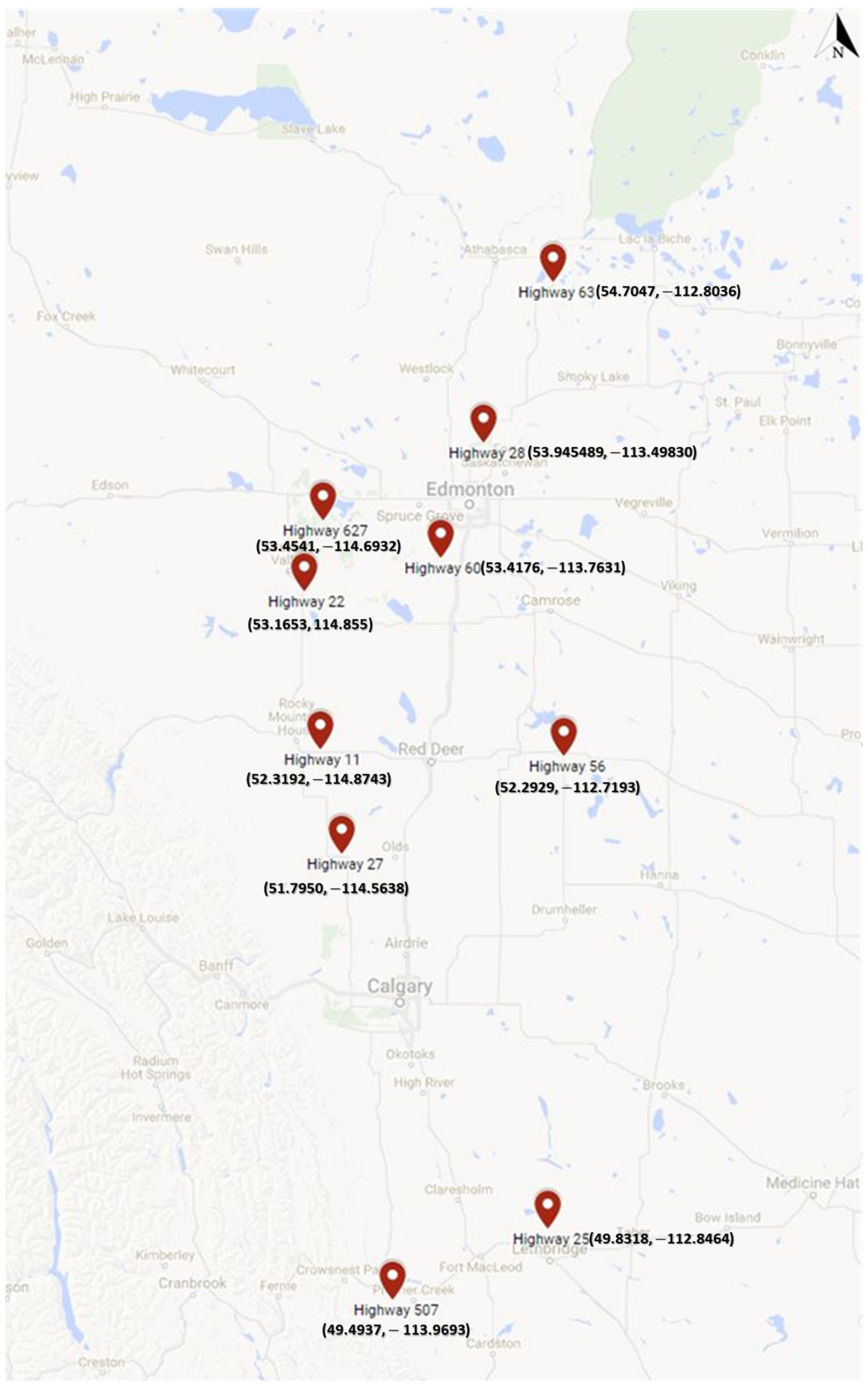
3. Data Collection and Test Segments
4. Methodology
4.1. Feature Extraction
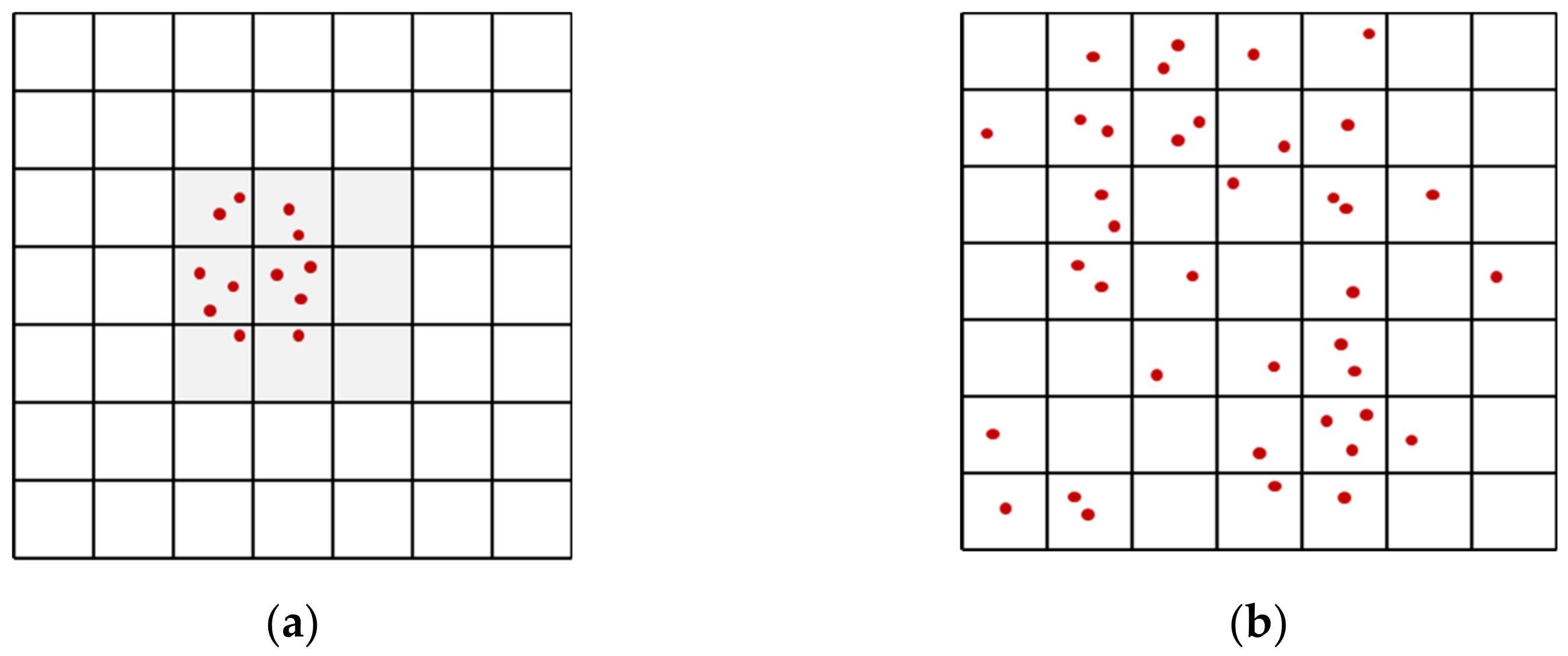
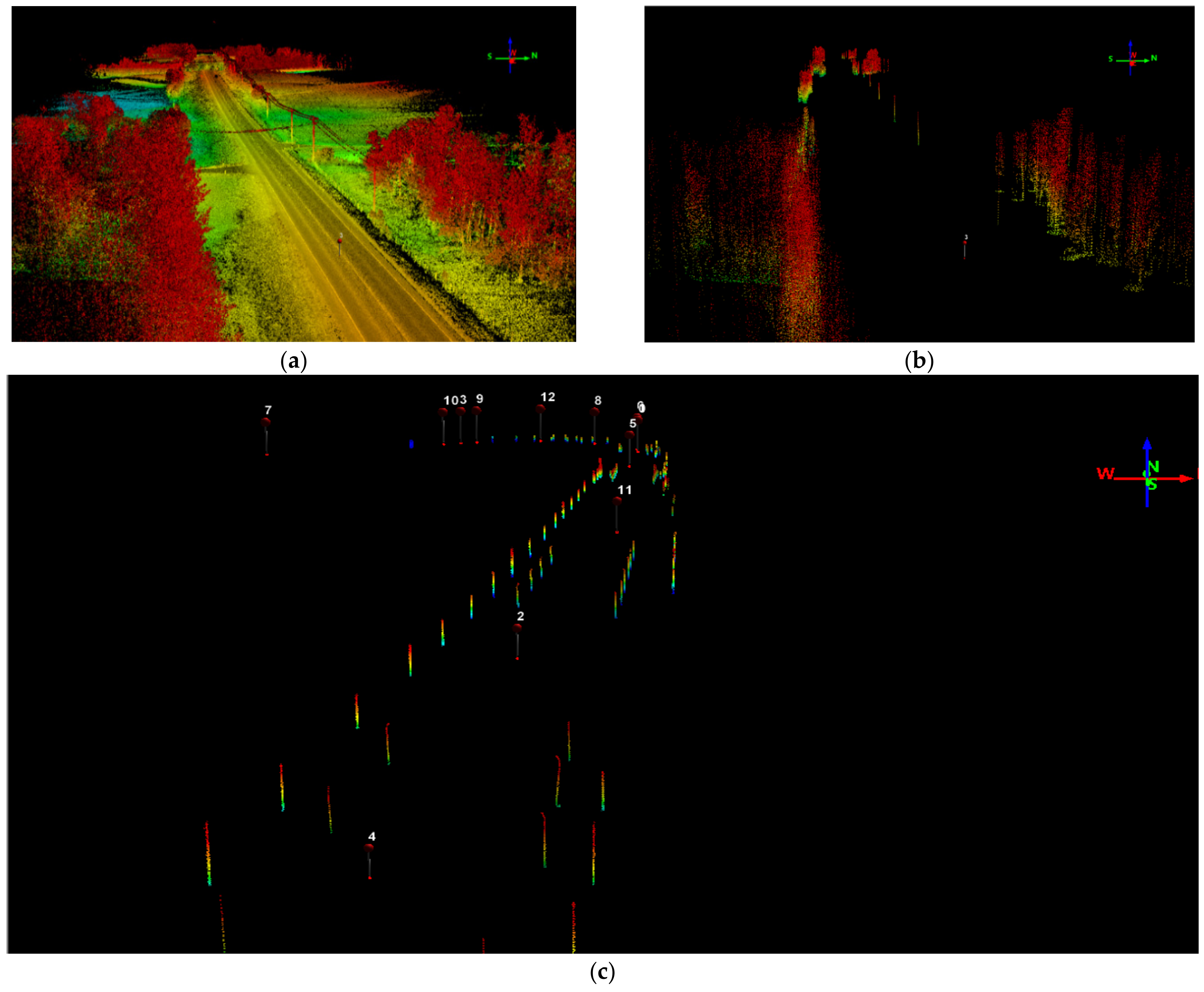
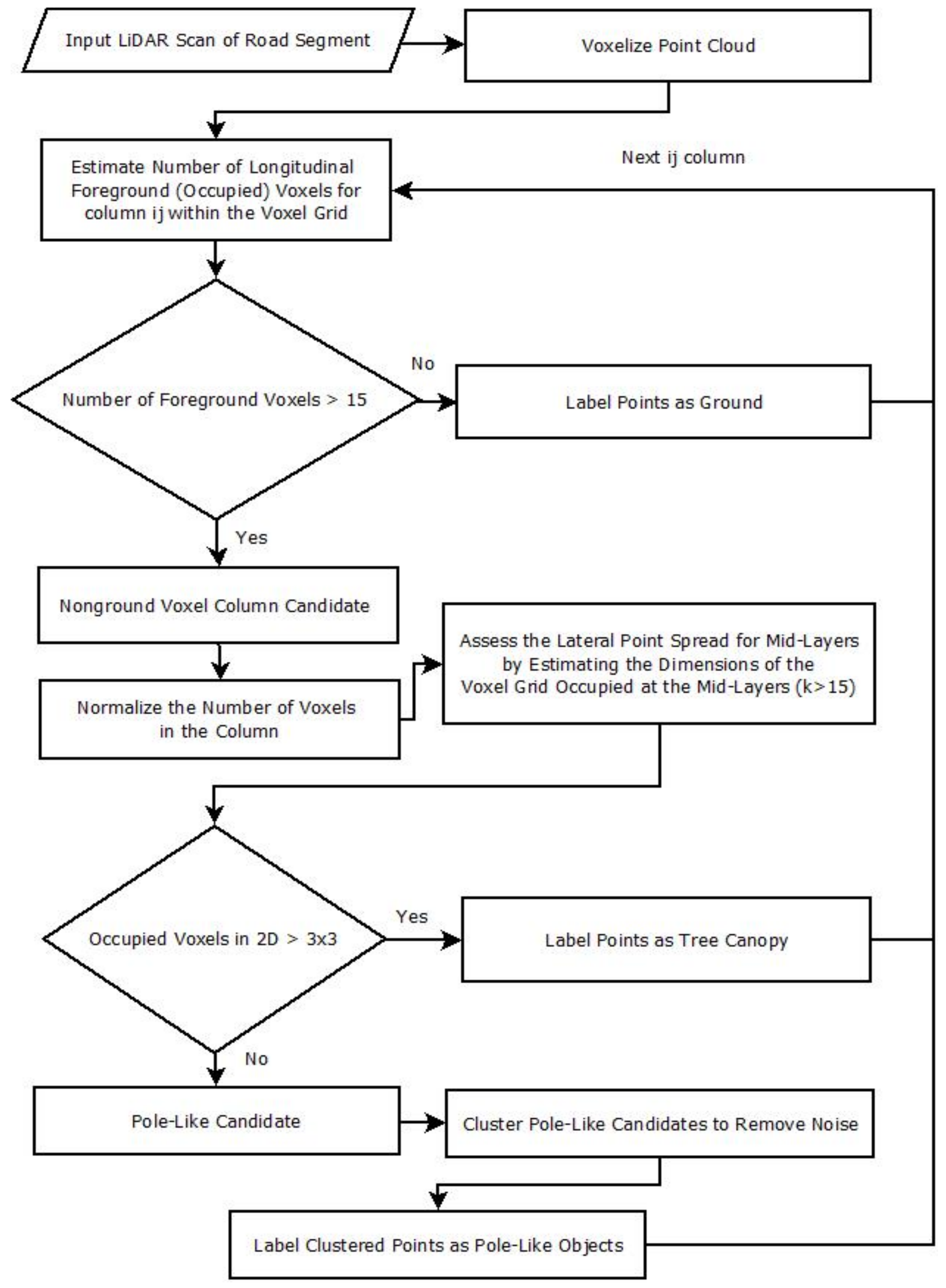
4.1.1. Pole-Like Object Extraction
4.1.2. Side Slope Estimation
4.1.3. Traffic Sign Post Extraction
4.1.4. Curve Detection and Radii Estimation
4.2. Logistic Regression
4.3. Collision-Level Data Fusion Method
5. Results and Discussion
5.1. Variability in Extracted Features
5.2. Safety Assessment
6. Summary and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Alberta Transportation. Alberta Traffic Collision Statistics 2016; Publication Alberta Vehicle Geographical Statistics, Alberta Transportation, Office of Traffic Safety: Edmonton, AB, Canada, 2016. [Google Scholar]
- Liu, C.; Ye, T.J. Run-Off-Road Crashes: An on-Scene Perspective; NHTSA: Washington, DC, USA, 2011; p. 36. [Google Scholar]
- National Highway Traffic Safety Administration. Fatality Analysis Reporting System. Available online: https://cdan.nhtsa.gov/SASStoredProcess/guest (accessed on 27 July 2018).
- AASHTO. A Policy on Geometric Design of Highways and Streets, 2011; American Association of State Highway Transportation Officials: Washington, DC, USA, 2011. [Google Scholar]
- Bullough, J.D.; Donnell, E.T.; Rea, M.S. To illuminate or not to illuminate: Roadway lighting as it affects traffic safety at intersections. Accid. Anal. Prev. 2013, 53, 65–77. [Google Scholar] [CrossRef]
- Bhagavathula, R.; Gibbons, R.B.; Edwards, C.J. Relationship between Roadway Illuminance Level and Nighttime Rural Intersection Safety. Transp. Res. Rec. J. Transp. Res. Board 2015, 2485, 8–15. [Google Scholar] [CrossRef]
- El Esawey, M.; Sayed, T. Evaluating safety risk of locating above ground utility structures in the highway right-of-way. Accid. Anal. Prev. 2012, 49, 419–428. [Google Scholar] [CrossRef]
- Hauer, E. An exemplum and its road safety morals. Accid. Anal. Prev. 2016, 94, 168–179. [Google Scholar] [CrossRef]
- Lee, J.; Mannering, F. Impact of roadside features on the frequency and severity of run-off-roadway accidents: An empirical analysis. Accid. Anal. Prev. 2002, 34, 149–161. [Google Scholar] [CrossRef]
- Yadav, M.; Lohani, B.; Singh, A.K.; Husain, A. Identification of pole-like structures from mobile lidar data of complex road environment. Int. J. Remote Sens. 2016, 37, 4748–4777. [Google Scholar] [CrossRef]
- El-Halawany, S.I.; Lichti, D.D. Detecting road poles from mobile terrestrial laser scanning data. GIScience Remote Sens. 2013, 50, 704–722. [Google Scholar] [CrossRef]
- Gargoum, S.A.; Koch, J.C.; El-Basyouny, K. A Voxel-Based Method for Automated Detection and Mapping of Light Poles on Rural Highways using LiDAR Data. Transp. Res. Rec. J. Transp. Res. Board 2018, 2672, 274–283. [Google Scholar] [CrossRef]
- Wu, B.; Yu, B.; Yue, W.; Shu, S.; Tan, W.; Hu, C.; Huang, Y.; Wu, J.; Liu, H. A Voxel-Based Method for Automated Identification and Morphological Parameters Estimation of Individual Street Trees from Mobile Laser Scanning Data. Remote. Sens. 2013, 5, 584–611. [Google Scholar] [CrossRef] [Green Version]
- Teo, T.-A.; Chiu, C.-M. Pole-Like Road Object Detection From Mobile Lidar System Using a Coarse-to-Fine Approach. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2015, 8, 4805–4818. [Google Scholar] [CrossRef]
- Gargoum, S.; Karsten, L.; El-Basyouny, K. Network Level Clearance Assessment using LiDAR to Improve the Reliability and Efficiency of Issuing Over-Height Permits on Highways. Transp. Res. Rec. J. Transp. Res. Board 2018, 2672, 45–56. [Google Scholar] [CrossRef]
- Gargoum, S.A.; Karsten, L. Virtual assessment of sight distance limitations using LiDAR technology: Automated obstruction detection and classification. Autom. Constr. 2021, 125, 103579. [Google Scholar] [CrossRef]
- Gargoum, S.A.; El Basyouny, K. A literature synthesis of LiDAR applications in transportation: Feature extraction and geometric assessments of highways. GIScience Remote. Sens. 2019, 56, 864–893. [Google Scholar] [CrossRef]
- Karsten, L.; Gargoum, S.; Saleh, M.; El-Basyouny, K. Automated Framework to Audit Traffic Signs Using Remote Sensing Data. J. Infrastruct. Syst. 2021, 27, 04021014. [Google Scholar] [CrossRef]
- Zeybek, M. Extraction of Road Lane Markings from Mobile LiDAR Data. Transp. Res. Rec. J. Transp. Res. Board 2021. [Google Scholar] [CrossRef]
- Hou, Q.; Ai, C. A network-level sidewalk inventory method using mobile LiDAR and deep learning. Transp. Res. Part C Emerg. Technol. 2020, 119, 102772. [Google Scholar] [CrossRef]
- Che, E.; Olsen, M.J.; Jung, J. Efficient segment-based ground filtering and adaptive road detection from mobile light detection and ranging (LiDAR) data. Int. J. Remote. Sens. 2021, 42, 3633–3659. [Google Scholar] [CrossRef]
- Wang, Z.; Yang, L.; Sheng, Y.; Shen, M. Pole-Like Objects Segmentation and Multiscale Classification-Based Fusion from Mobile Point Clouds in Road Scenes. Remote. Sens. 2021, 13, 4382. [Google Scholar] [CrossRef]
- Gao, Z.; Doi, A.; Kato, T.; Takahashi, H.; Sakakibara, K.; Hosokawa, T.; Harada, M. Utility pole extraction processing from point cloud data from 3D measurement and its applications. In Proceedings of the 2020 11th International Conference on Awareness Science and Technology (iCAST); IEEE: Piscataway, NJ, USA, 2020; pp. 1–6. [Google Scholar]
- Yang, B.; Dong, Z. A shape-based segmentation method for mobile laser scanning point clouds. ISPRS J. Photogramm. Remote. Sens. 2013, 81, 19–30. [Google Scholar] [CrossRef]
- Lehtomäki, M.; Jaakkola, A.; Hyyppä, J.; Kukko, A.; Kaartinen, H. Detection of Vertical Pole-Like Objects in a Road Environment Using Vehicle-Based Laser Scanning Data. Remote. Sens. 2010, 2, 641–664. [Google Scholar] [CrossRef] [Green Version]
- Pu, S.; Rutzinger, M.; Vosselman, G.; Elberink, S.O. Recognizing basic structures from mobile laser scanning data for road inventory studies. ISPRS J. Photogramm. Remote. Sens. 2011, 66, S28–S39. [Google Scholar] [CrossRef]
- El-Halawany, S.I.; Lichti, D.D. Detection of Road Poles from Mobile Terrestrial Laser Scanner Point Cloud. In 2011 International Workshop on Multi-Platform/Multi-Sensor Remote Sensing and Mapping; IEEE: Piscataway, NJ, USA, 2011; pp. 1–6. [Google Scholar]
- Yan, L.; Liu, H.; Tan, J.; Li, Z.; Xie, H.; Chen, C. Scan Line Based Road Marking Extraction from Mobile LiDAR Point Clouds. Sensors 2016, 16, 903. [Google Scholar] [CrossRef] [PubMed]
- Lehtomäki, M.; Jaakkola, A.; Hyyppa, J.; Lampinen, J.; Kaartinen, H.; Kukko, A.; Puttonen, E.; Hyyppa, H. Object Classification and Recognition From Mobile Laser Scanning Point Clouds in a Road Environment. IEEE Trans. Geosci. Remote. Sens. 2016, 54, 1226–1239. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Wang, W.; Tang, S.; Li, D.; Wang, Y.; Yuan, Z.; Guo, R.; Li, X.; Xiu, W. Localization and Extraction of Road Poles in Urban Areas from Mobile Laser Scanning Data. Remote. Sens. 2019, 11, 401. [Google Scholar] [CrossRef] [Green Version]
- Tu, J.; Yao, J.; Li, L.; Zhao, W.; Xiang, B. Extraction of Street Pole-Like Objects Based on Plane Filtering From Mobile LiDAR Data. IEEE Trans. Geosci. Remote. Sens. 2021, 59, 749–768. [Google Scholar] [CrossRef]
- Li, J.; Cheng, X. Supervoxel-based extraction and classification of pole-like objects from MLS point cloud data. Opt. Laser Technol. 2022, 146, 107562. [Google Scholar] [CrossRef]
- Jones, I.S.; Baum, A.S. An analysis of the urban utility pole accident problem. In Proceedings: American Association for Automotive Medicine Annual Conference, No. 22; Association for the Advancement of Automotive Medicine: Chicago, IL, USA, 1978; pp. 165–180. [Google Scholar]
- Fox, J.C.; Good, M.C.; Joubert, P.N. Collisions with Utility Poles: Summary Report; Office of Road Safety, Commonwealth Department of Transport: Melbourne, Australia, 1979. [Google Scholar]
- Mak, K.K.; Mason, R.L. Accident Analysis: Breakaway and Nonbreakaway Poles Including Sign and Light Standards along Highways; The Administration: Washington, DC, USA, 1980. [Google Scholar]
- Zegeer, C.V.; Parker, P.M., Jr. Effect of traffic and roadway features on utility pole accidents. Transp. Res. Rec. 1984, 970, 65–76. [Google Scholar]
- Good, M.; Fox, J.; Joubert, P. An in-depth study of accidents involving collisions with utility poles. Accid. Anal. Prev. 1987, 19, 397–413. [Google Scholar] [CrossRef]
- Holdridge, J.M.; Shankar, V.N.; Ulfarsson, G.F. The crash severity impacts of fixed roadside objects. J. Saf. Res. 2005, 36, 139–147. [Google Scholar] [CrossRef]
- Schneider, W.H.; Savolainen, P.T.; Zimmerman, K. Driver Injury Severity Resulting from Single-Vehicle Crashes along Horizontal Curves on Rural Two-Lane Highways. Transp. Res. Rec. J. Transp. Res. Board 2009, 2102, 85–92. [Google Scholar] [CrossRef]
- Xie, Y.; Zhao, K.; Huynh, N. Analysis of driver injury severity in rural single-vehicle crashes. Accid. Anal. Prev. 2012, 47, 36–44. [Google Scholar] [CrossRef]
- Park, J.; Abdel-Aty, M. Assessing the safety effects of multiple roadside treatments using parametric and nonparametric approaches. Accid. Anal. Prev. 2015, 83, 203–213. [Google Scholar] [CrossRef] [PubMed]
- Roque, C.; Moura, F.; Cardoso, J.L. Detecting unforgiving roadside contributors through the severity analysis of ran-off-road crashes. Accid. Anal. Prev. 2015, 80, 262–273. [Google Scholar] [CrossRef] [PubMed]
- RIEGL. RIEGL VMX-450 Data Sheet. RIEGL Laser Measurment Systems. Available online: http://www.riegl.com/uploads/tx_pxpriegldownloads (accessed on 1 April 2017).
- Tawfeek, M.; El-Basyouny, K. Safety Prediction Modelling and Deployment of Safety Analyst Software; University of Alberta: Edmonton, AB, Canada, 2017. [Google Scholar]
- Montella, A. A comparative analysis of hotspot identification methods. Accid. Anal. Prev. 2010, 42, 571–581. [Google Scholar] [CrossRef] [PubMed]
- Chow, R.; Mah, J.; Duckworth, R.; Bielkiewicz, B.; Aoro, J.; Dunn, G.; Ekkelenkamp, D.; Latte, B.; Putz, H.; Shaflik, P. Alberta Highway Lighting Guide; Alberta Transportation: Edmonton, AB, Canada, 2003. [Google Scholar]
- Gargoum, S.A.; El-Basyouny, K.; Froese, K.; Gadowski, A. A Fully Automated Approach to Extract and Assess Road Cross Sections From Mobile LiDAR Data. IEEE Trans. Intell. Transp. Syst. 2018, 19, 3507–3516. [Google Scholar] [CrossRef]
- Gargoum, S.; El-Basyouny, K.; Sabbagh, J.; Froese, K. Automated Highway Sign Extraction Using Lidar Data. Transp. Res. Rec. J. Transp. Res. Board 2017, 2643, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Gargoum, S.; El-Basyouny, K.; Sabbagh, J. Automated extraction of horizontal curve attributes using LiDAR data. Transp. Res. Rec. J. Transp. Res. Board 2018, 2672, 98–106. [Google Scholar] [CrossRef]
- Gargoum, S.A.; El-Basyouny, K.; Sabbagh, J. Assessing Stopping and Passing Sight Distance on Highways Using Mobile LiDAR Data. J. Comput. Civ. Eng. 2018, 32, 04018025. [Google Scholar] [CrossRef]
- Alberta Transportation. Highway Geometric Design Guide; Alberta Transportation, Office of Traffic Safety: Edmonton, AB, Canada, 1999. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Metric 1 | Results on AB-20-02 |
|---|---|
| Precision (%) | 98 |
| Recall (Detection Rate) (%) | 79 |
| N | Min | Max | Mean | Std. Deviation | |
|---|---|---|---|---|---|
| Severity | 100 | 0 | 1 | 0.26 | 0.44 |
| Number of Poles | 100 | 0 | 24 | 6.95 | 5.64 |
| Average Pole Offset (m) | 94 | 13 | 40 | 25.65 | 5.80 |
| Average Pole Spacing (m) | 93 | 15 | 230 | 61.24 | 41.97 |
| Tree Canopy Existence | 100 | 0 | 1 | 0.72 | 0.45 |
| Average Tree Canopy Offset (m) | 72 | 17 | 45 | 30.07 | 6.37 |
| Number of Sign Posts | 100 | 0 | 9 | 3.21 | 3.03 |
| Average Sign Spacing (m) | 59 | 1 | 278 | 56.11 | 46.84 |
| Existence of a Curve | 100 | 0 | 1 | 0.12 | 0.33 |
| Curve Radius (m) | 10 | 599 | 1614 | 972.11 | 300.42 |
| Side Slope Flatness (1:x) | 100 | 0 | 37.8 | 6.57 | 7.32 |
| Estimate | S.E. a | Wald | df b | p-Value | OR c | |
|---|---|---|---|---|---|---|
| Minimum Roadside Object Offset | −0.043 | 0.021 | 4.123 | 1 | 0.042 * | 0.958 |
| Side Slope Flatness | −0.086 | 0.047 | 3.326 | 1 | 0.068 * | 0.918 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gargoum, S.; Karsten, L.; El-Basyouny, K.; Chen, X. Enriching Roadside Safety Assessments Using LiDAR Technology: Disaggregate Collision-Level Data Fusion and Analysis. Infrastructures 2022, 7, 7. https://doi.org/10.3390/infrastructures7010007
Gargoum S, Karsten L, El-Basyouny K, Chen X. Enriching Roadside Safety Assessments Using LiDAR Technology: Disaggregate Collision-Level Data Fusion and Analysis. Infrastructures. 2022; 7(1):7. https://doi.org/10.3390/infrastructures7010007
Chicago/Turabian StyleGargoum, Suliman, Lloyd Karsten, Karim El-Basyouny, and Xinyu Chen. 2022. "Enriching Roadside Safety Assessments Using LiDAR Technology: Disaggregate Collision-Level Data Fusion and Analysis" Infrastructures 7, no. 1: 7. https://doi.org/10.3390/infrastructures7010007