
Transmission Range Evaluations for Connected Vehicles at Highway-Rail Grade Crossings


Abstract
:
1. Introduction
2. Methods
2.1. Reliability-Based Risk Analysis
2.2. Problem Formulation
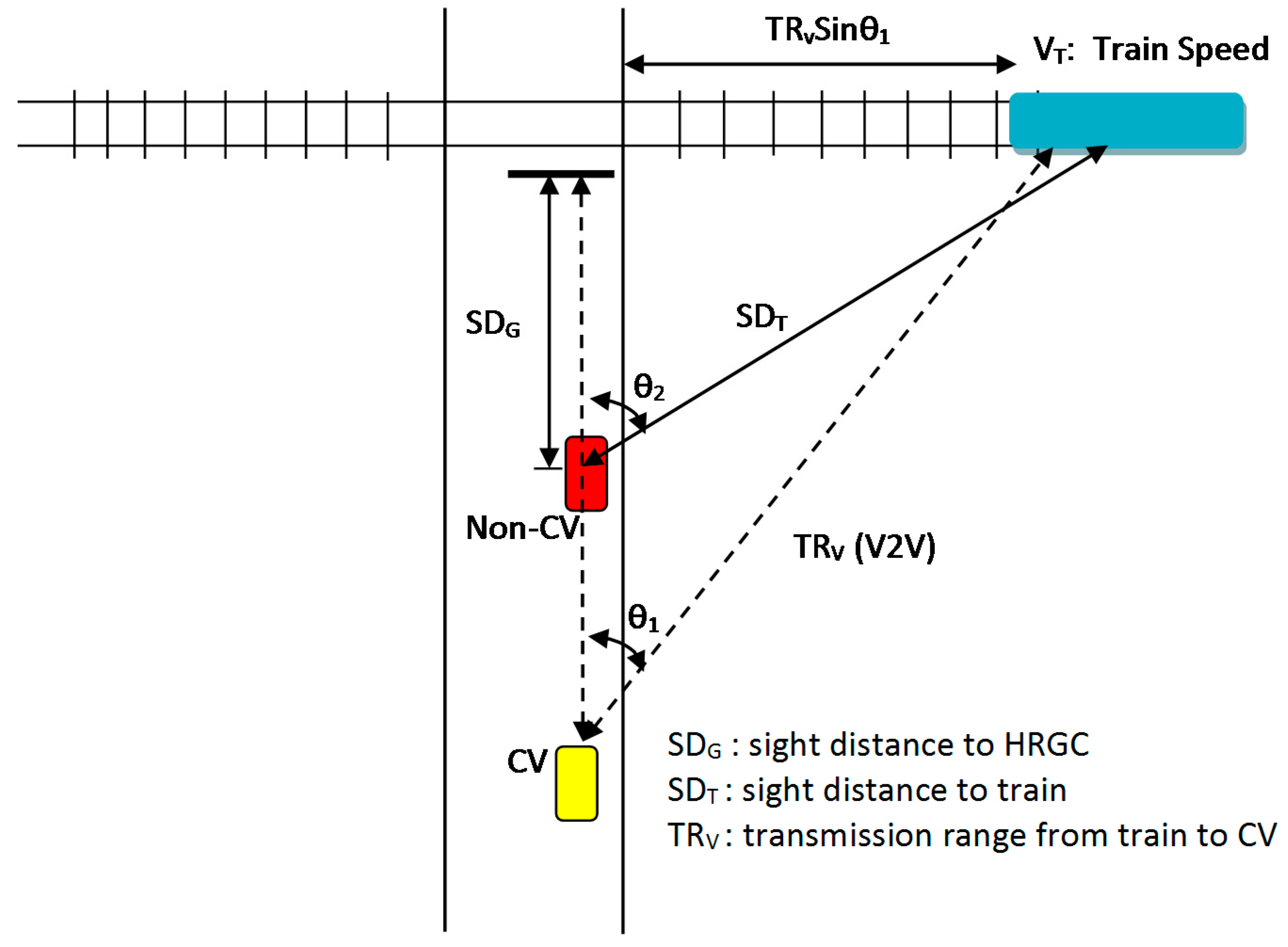
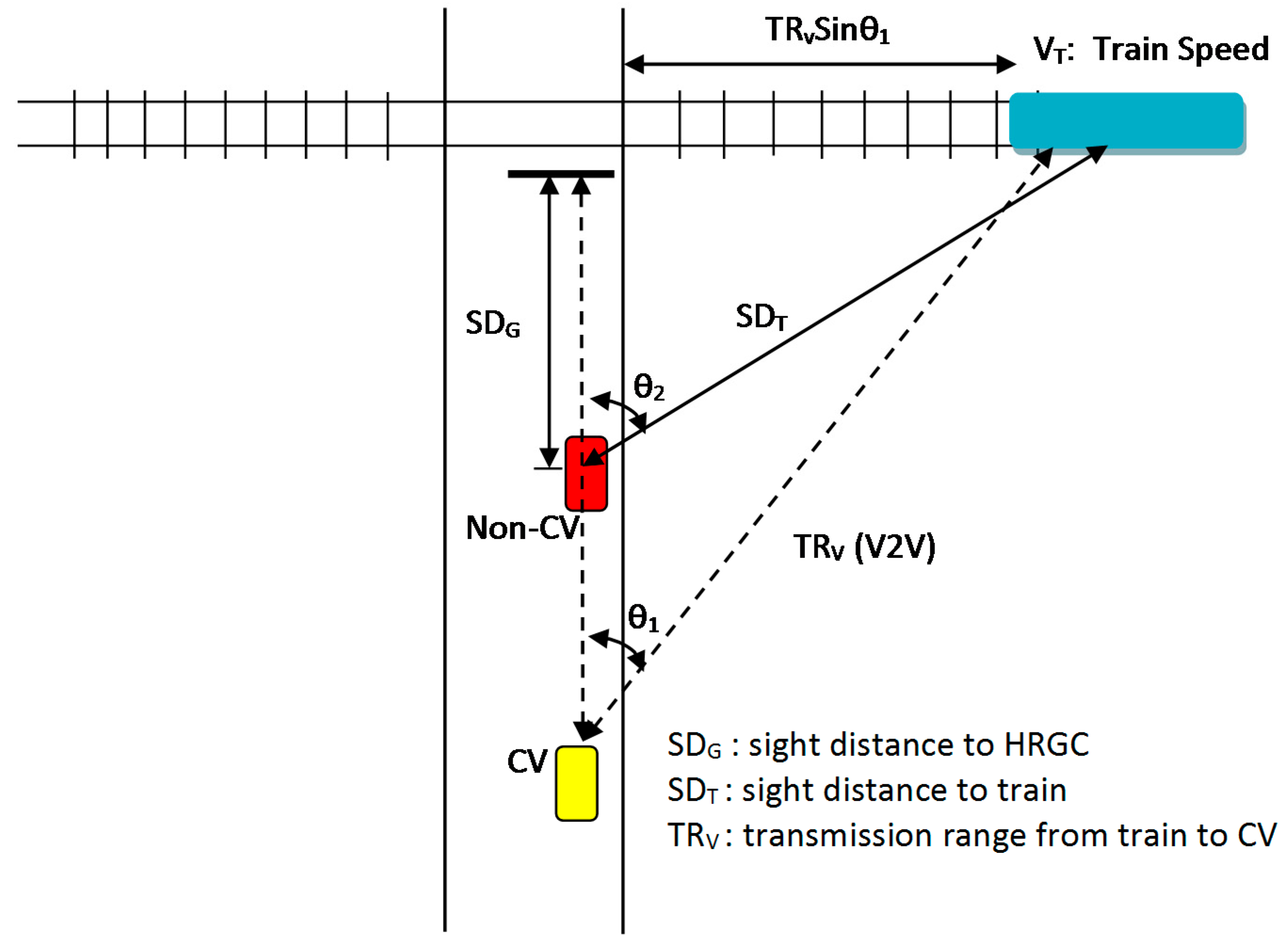
2.2.1. Assumptions
- A single track and two-lane highway
- Straight sections with no curves on the highway
- The highway–rail intersecting angle is 90°
- The highway pavement is dry to provide sufficient friction for deceleration
- No line of sight obstruction between highway vehicles and the approaching train
- The sight distance to train is 300 m under fair weather conditions
- The speed of an approaching train is constant
- CV drivers are obedient to the onboard warning of a train arrival to stop their vehicles
2.2.2. Supply Thresholds
2.2.3. Demand Functions
- d = stopping distance (m),
- Vi = initial vehicle speed (km/h),
- Vf = final vehicle speed (km/h),
- t = perception-reaction time (s),
- ai = initial deceleration rate (m/s2),
- af = final deceleration rate (m/s2),
- G = grade, and
- TTC = time to collision.
- = risk of collision for stopping distance,
- = risk of collision for TTC,
- =supply threshold of stopping distance,
- =supply threshold of TTC.
2.3. Data Sources
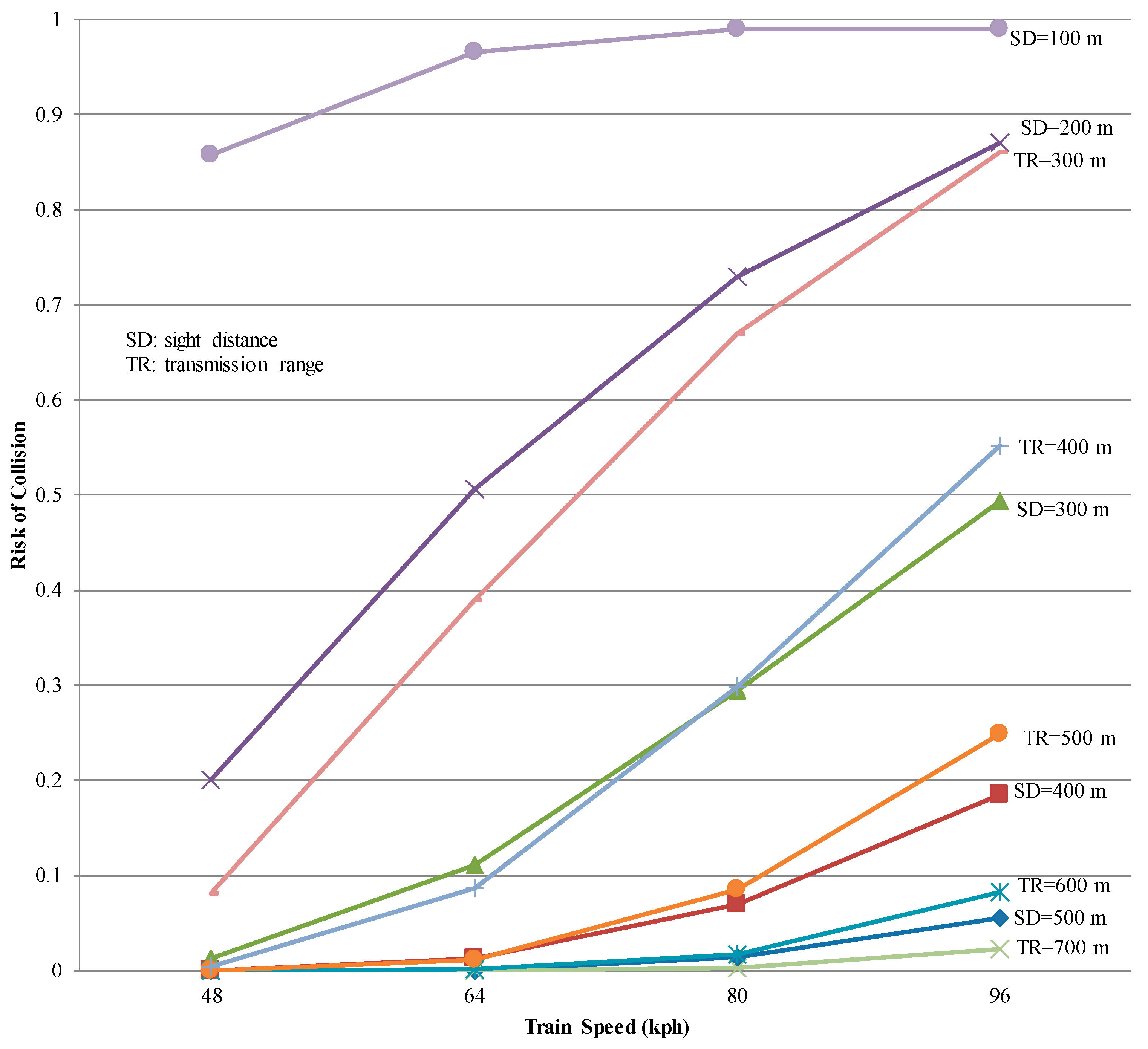
3. Results
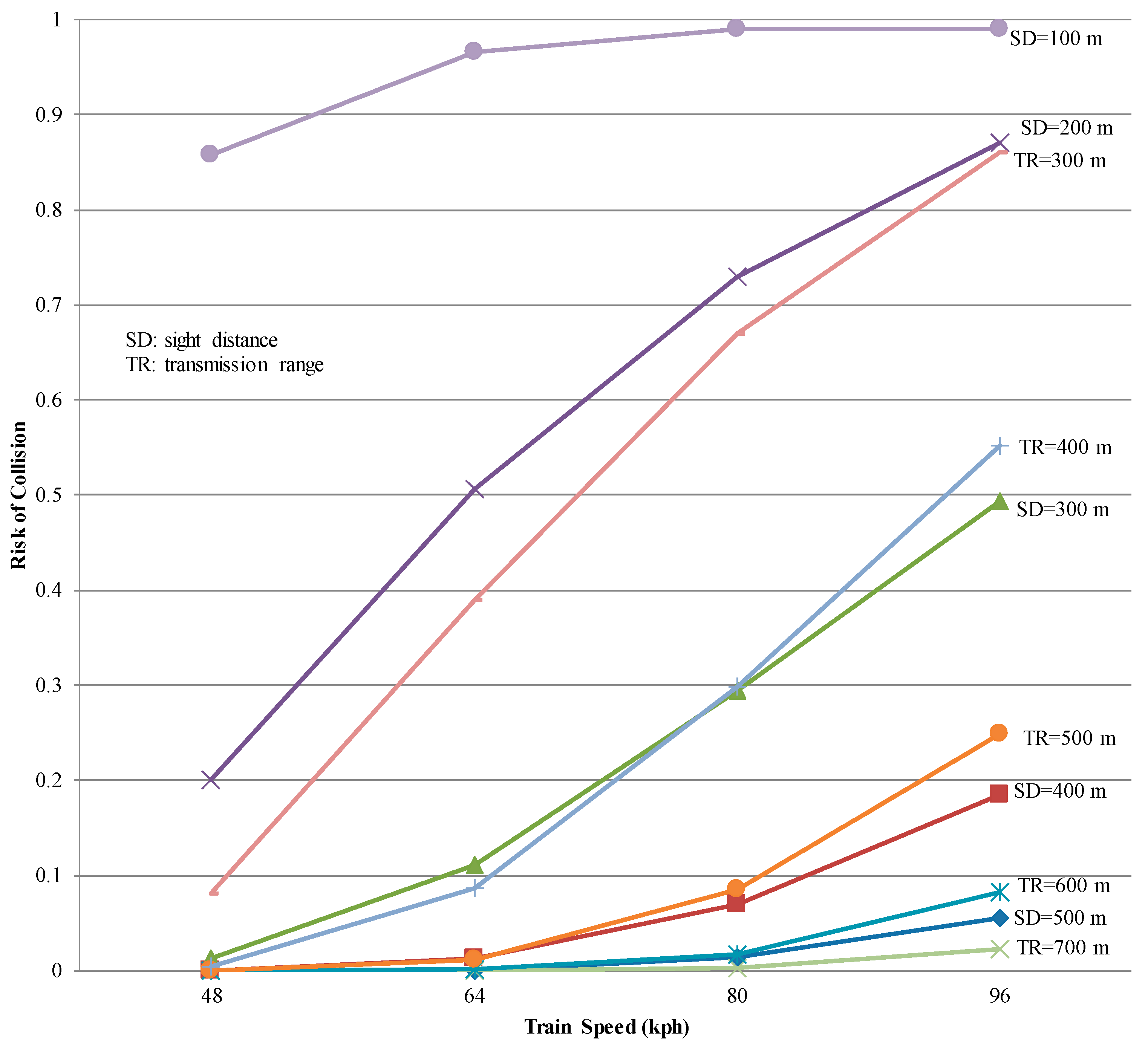
3.1. Passive HRGC
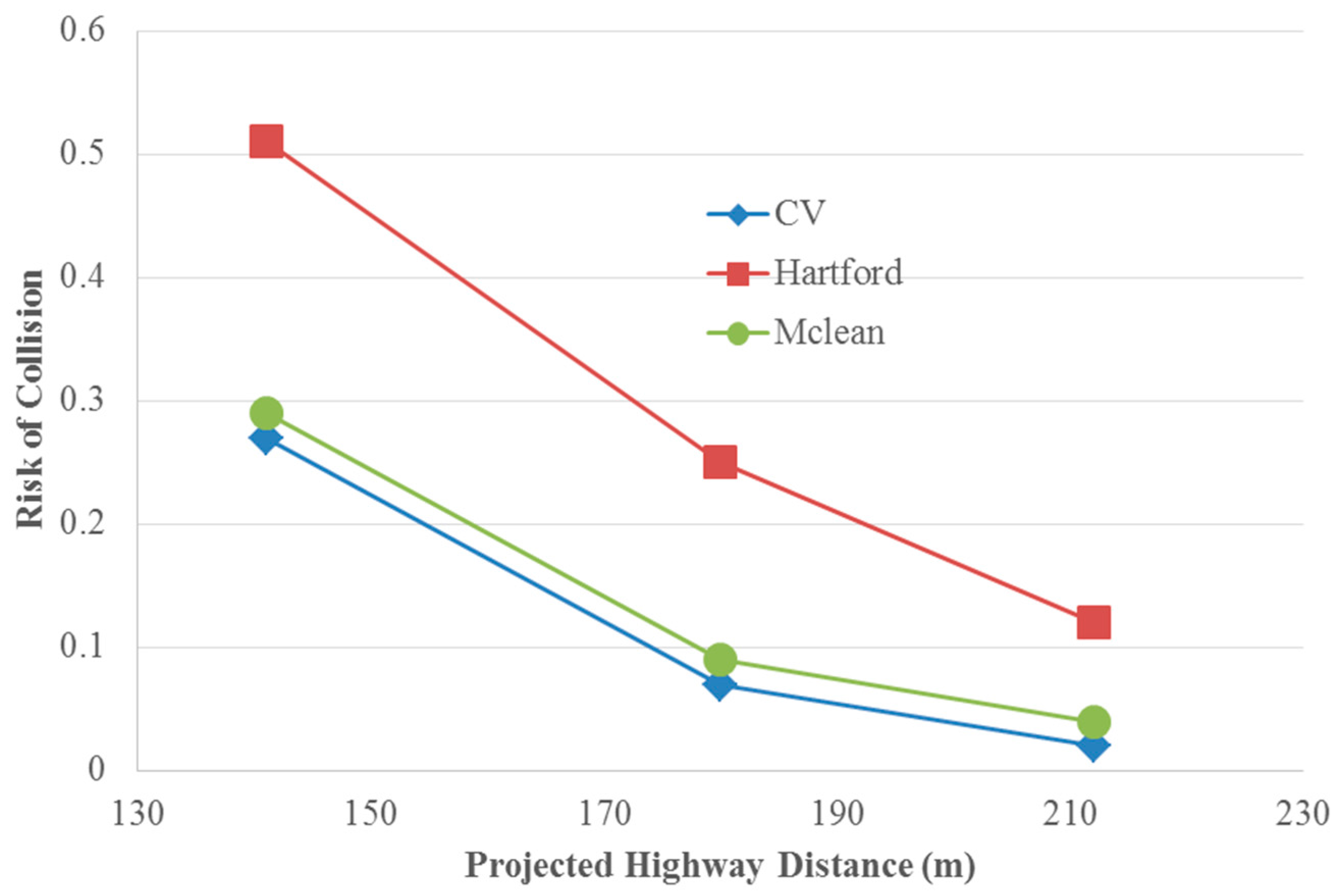
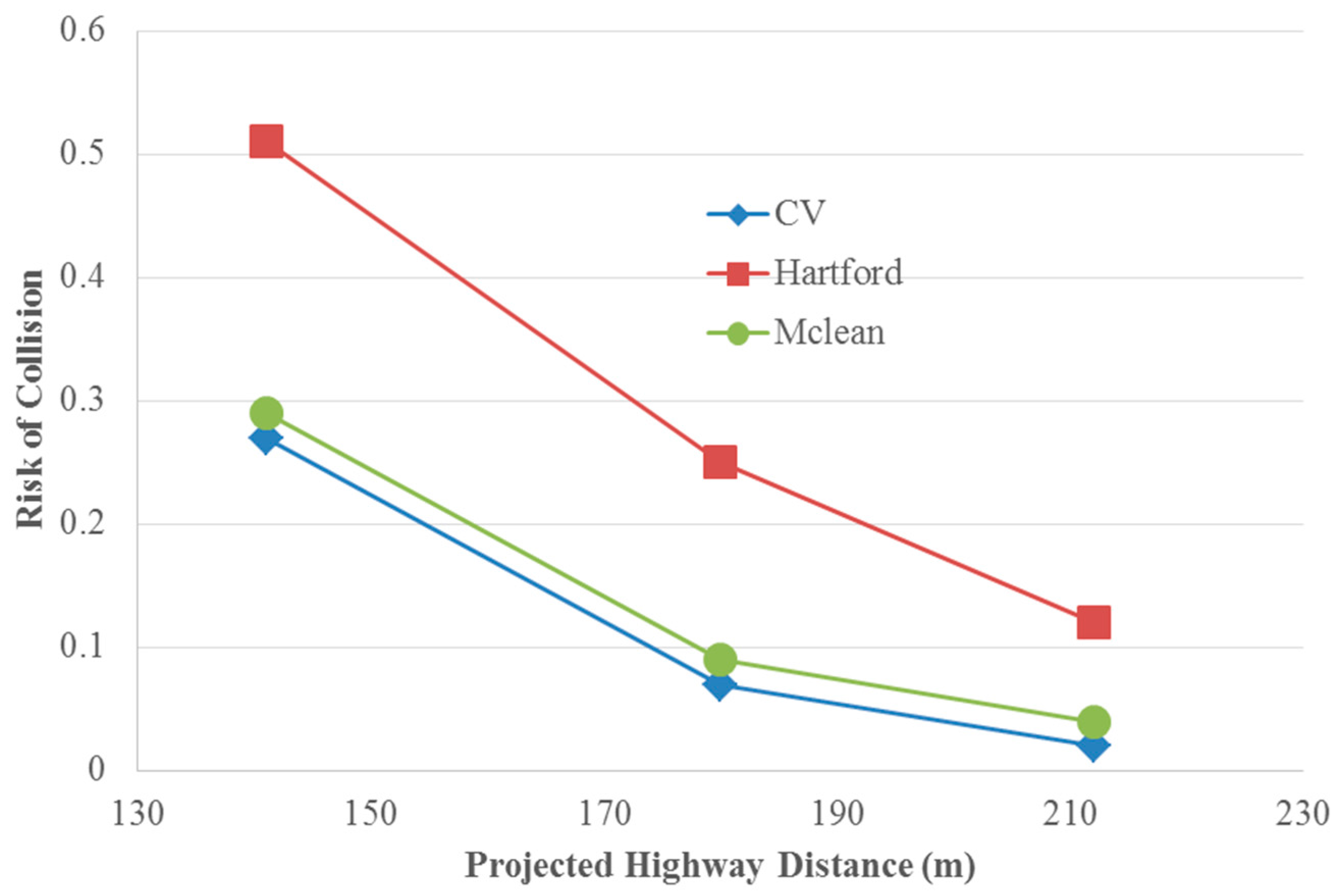
3.2. Active HRGC
4. Discussion
5. Conclusions
Author Contributions
Conflicts of Interest
References
- Federal Railroad Administration. Available online: https://www.fra.dot.gov/Page/P0855 (accessed on 16 December 2016).
- Brod, D.; Weisbrod, G.; Moses, S.J.; Gillen, D.B.; Martland, C.D. Comprehensive Costs of Highway-Rail Grade Crossing Crashes; Transportation Research Board: Washington, DC, USA, 2013. [Google Scholar]
- Federal Railroad Administration. Railroad Safety Statistics 2012 Preliminary Annual Report; Department of Transportation: Washington, DC, USA, 2013.
- Saccomanno, F.F.; Park, P.Y.-J.; Fu, L. Estimating countermeasure effects for reducing collisions at highway–railway grade crossings. Accid. Anal. Prev. 2007, 39, 406–416. [Google Scholar] [CrossRef] [PubMed]
- Meeker, F.; Fox, D.; Weber, C. A Comparison of Driver Behavior at Railroad Grade Crossings with Two Different Protection Systems. Accid. Anal. Prev. 1997, 29, 11–16. [Google Scholar] [CrossRef]
- Khattak, A.; McKnight, G. Gate rushing at highway-railroad grade crossings: Drivers’ response to a centerline barrier. Transp. Res. Rec. 2008, 2056, 104–109. [Google Scholar] [CrossRef]
- Russell, E.R.; Shah, H.D.; Rys, M.J. Study of Drivers’ Behavior at Passive Railroad-Highway Grade Crossings; Mack-Blackwell Transportation Center: Fayetteville, AR, USA, 2007. [Google Scholar]
- Tey, L.-S.; Ferreira, L.; Wallace, A. Measuring driver responses at railway level crossings. Accid. Anal. Prev. 2011, 43, 2134–2141. [Google Scholar] [CrossRef] [PubMed]
- Kasalica, S.; Vukadinović, R.; Lučanin, V. Study of Drivers’ Behaviour at a Passive Railway Crossing. Promet—Traffic Transp. 2012, 24, 193–201. [Google Scholar] [CrossRef]
- Rudin-Brow, C.M.; George, M.F.; Stuart, J.J. Human Factors Issues of Accidents at Passively Controlled Rural Level Crossings. Transp. Res. Rec. 2014, 2458, 96–103. [Google Scholar] [CrossRef]
- National Highway Traffic Safety Administration. Available online: https://www.federalregister.gov/documents/2017/01/12/2016-31059/federal-motor-vehicle-safety-standards-v2v-communications (accessed on 20 January 2017).
- Hartong, M.; Goel, R.; Farkas, C; Wijesekera, D. PTC-VANET Interactions to Prevent Highway Rail Intersection Crossing Accidents. In Proceedings of the IEEE 65th Vehicular Technology Conference, Dublin, Ireland, 22–25 April 2007; pp. 2550–2554. [Google Scholar]
- Bezzina, D.; Sayer, J. Safety Pilot Model Deployment: Test Conductor Team Report; Rep. No. DOT HS 812 171; National Highway Traffic Safety Administration: Washington, DC, USA, 2015.
- Faber, M.H.; Stewart, M.G. Risk Assessment for Civil Engineering Facilities: Critical Overview and Discussion. Reliab. Eng. Syst. Saf. 2003, 80, 173–184. [Google Scholar] [CrossRef]
- On-board Systems Requirements for V2V Safety Communications; Surface Vehicle Standard J2945/1; SAE International: Warrendale, PA, USA, 2016.
- Ang, A.H.S.; Tang, W.H. Probability Concepts in Engineering Planning and Design; John Wiley: New York, NY, USA, 1975; Volume 1. [Google Scholar]
- Ellingwood, B.; Galambos, T; MacGregor, J.; Cornell, C. Development of a Probability Based Load Criterion for American National Standard; US Department of Commerce: Washington, DC, USA, 1980.
- Mordechai, S. Applications of Monte Carlo Method in Science and Engineering; InTech: Rijeka, Croatia, 2011. Available online: http://www.intechopen.com/books/applications-of-monte-carlo-method-in-science-and-engineering (accessed on 5 January 2016).
- Metropolis, N.; Ulam, S. The Monte Carlo method. J. Am. Stat. Assoc. 1949, 44, 335–341. [Google Scholar] [CrossRef] [PubMed]
- 49 CFR 234.225—Activation of warning system; Federal Railroad Administration: Washington, DC, USA, 1998.
- American Association of State Highway and Transportation Officials. A Policy on Geometric Design of Highways and Streets; AASHTO: Washington, DC, USA, 2011. [Google Scholar]
- Tey, L.-S.; Wallis, G.; Cloete, S.; Ferreira, L. Modelling driver behaviour towards innovative warning devices at railway level crossings. Accid. Anal. Prev. 2013, 51, 104–111. [Google Scholar] [CrossRef] [PubMed]
- Moon, Y.J.; Coleman, F. Highway-Rail Quad Gate Operation Time by System Simulation of Dynamic Dilemma Zone. J. Trans. Eng. 2003, 129, 253–261. [Google Scholar] [CrossRef]
- Hsu, C.-J.; Jones, E.G. Sensitivity analyses of stopping distance for connected vehicles at active highway-rail grade crossings. Accid. Anal. Prev. 2017, 99, 210–217. [Google Scholar] [CrossRef] [PubMed]
- Behnood, A.; Mannering, F.L. The temporal stability of factors affecting driver injury severities in single-vehicle crashes: Some empirical evidence. Anal. Methods Accid. Res. 2015, 8, 7–32. [Google Scholar] [CrossRef]
- Behnood, A.; Mannering, F. An empirical assessment of the effects of economic recessions on pedestrian-injury crashes using mixed and latent-class models. Anal. Methods Accid. Res. 2016, 12, 1–17. [Google Scholar] [CrossRef]
- Mannering, F.L.; Shankar, V.; Bhat, C.R. Unobserved heterogeneity and the statistical analysis of Highway accident data. Anal. Methods Accid. Res. 2016, 11, 1–16. [Google Scholar] [CrossRef]
- Amendment of the Commission’s Rules Regarding Dedicated Short-Range Communication Services in the 5.850-5.925 GHz Band; Federal Communications Commission: Washington, DC, USA, 2006.
- Harding, J.; Powell, G.R.; Yoon, R.; Fikentscher, J.; Doyle, C.; Sade, D.; Lukuc, M.; Simons, J.; Wang, J. Vehicle-to-Vehicle Communications: Readiness of V2V Technology for Application; Rep. No. DOT HS 812 014; National Highway Traffic Safety Administration: Washington, DC, USA, 2014.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| HRGC | Vehicle | Sight/Transmission Distance * | Train Arrival Time | Highway Distance | Supply Threshold |
|---|---|---|---|---|---|
| Active | CV | TR | ≥20 s | TR Cosθ1 | TR Cosθ1 |
| Active | Non-CV | SDG | ≥20 s | SDG | SDG |
| Passive | CV | TR | TR Sinθ1/VT | TR Cosθ1 | TR Sinθ1/VT |
| Passive | Non-CV | SDT | SDT Sinθ2/VT | SDT Cosθ2 | SDT Sinθ2/VT |
| Vehicle | Non-CV | Non-CV | Non-CV | CV | |
|---|---|---|---|---|---|
| Site | McLean | Hartford | Simulator | Simulator | |
| Warning Device | Active | Active | Passive | Onboard | |
| (mean, standard deviation) | (mean, standard deviation) | (mean, standard deviation) | (mean, standard deviation) | ||
| Reaction Time (s) | Normal | (3.13, 1.59) | (3.13, 1.59) | (3.22, 1.69) | (3.21, 1.35) |
| Initial Speed (m/s) | Normal | (17.24, 1.9) | (18.92, 2.1) | (16.5, 1.6) | (16.5, 1.6) |
| Initial Brake (m/s2) | Log-normal | (0.51, 0.27) | (0.63, 0.39) | (0.73, 0.43) | (0.57, 0.33) |
| Final Speed (m/s) | Normal | (14.2, 1.42) | (16.85, 1.85) | (12.32, 1.47) | (10.02, 1.2) |
| Final Brake (m/s2) | Log-normal | (1.19, 0.56) | (0.85, 0.47) | (1.64, 0.56) | (1.02, 0.52) |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hsu, C.-J.; Jones, E.G. Transmission Range Evaluations for Connected Vehicles at Highway-Rail Grade Crossings. Designs 2017, 1, 2. https://doi.org/10.3390/designs1010002
Hsu C-J, Jones EG. Transmission Range Evaluations for Connected Vehicles at Highway-Rail Grade Crossings. Designs. 2017; 1(1):2. https://doi.org/10.3390/designs1010002
Chicago/Turabian StyleHsu, Chung-Jen, and Elizabeth G. Jones. 2017. "Transmission Range Evaluations for Connected Vehicles at Highway-Rail Grade Crossings" Designs 1, no. 1: 2. https://doi.org/10.3390/designs1010002
APA StyleHsu, C.-J., & Jones, E. G. (2017). Transmission Range Evaluations for Connected Vehicles at Highway-Rail Grade Crossings. Designs, 1(1), 2. https://doi.org/10.3390/designs1010002