Application of Finite Element Analysis in Modeling of Bionic Harrowing Discs


Abstract
:1. Introduction
1.1. Biomimetic Design
1.2. Finite Element Method
2. Materials and Method
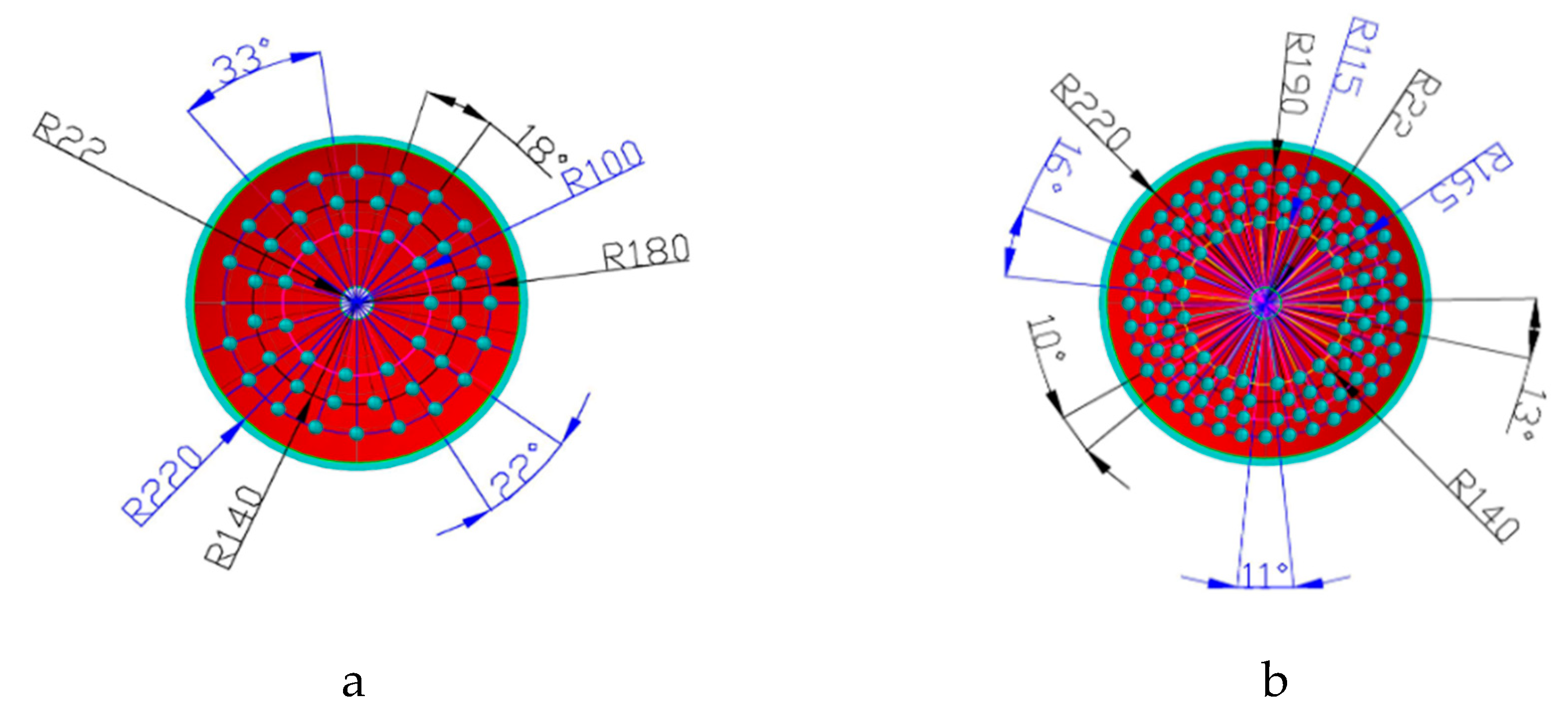
2.1. Determination of Parameters for Finite Element Modelling
2.2. Finite Element Method (FEM)
2.3. Validation of FEM Results
2.3.1. Preparation of Disc Samples
2.3.2. Soil Bin Experiment
3. Results and Discussion
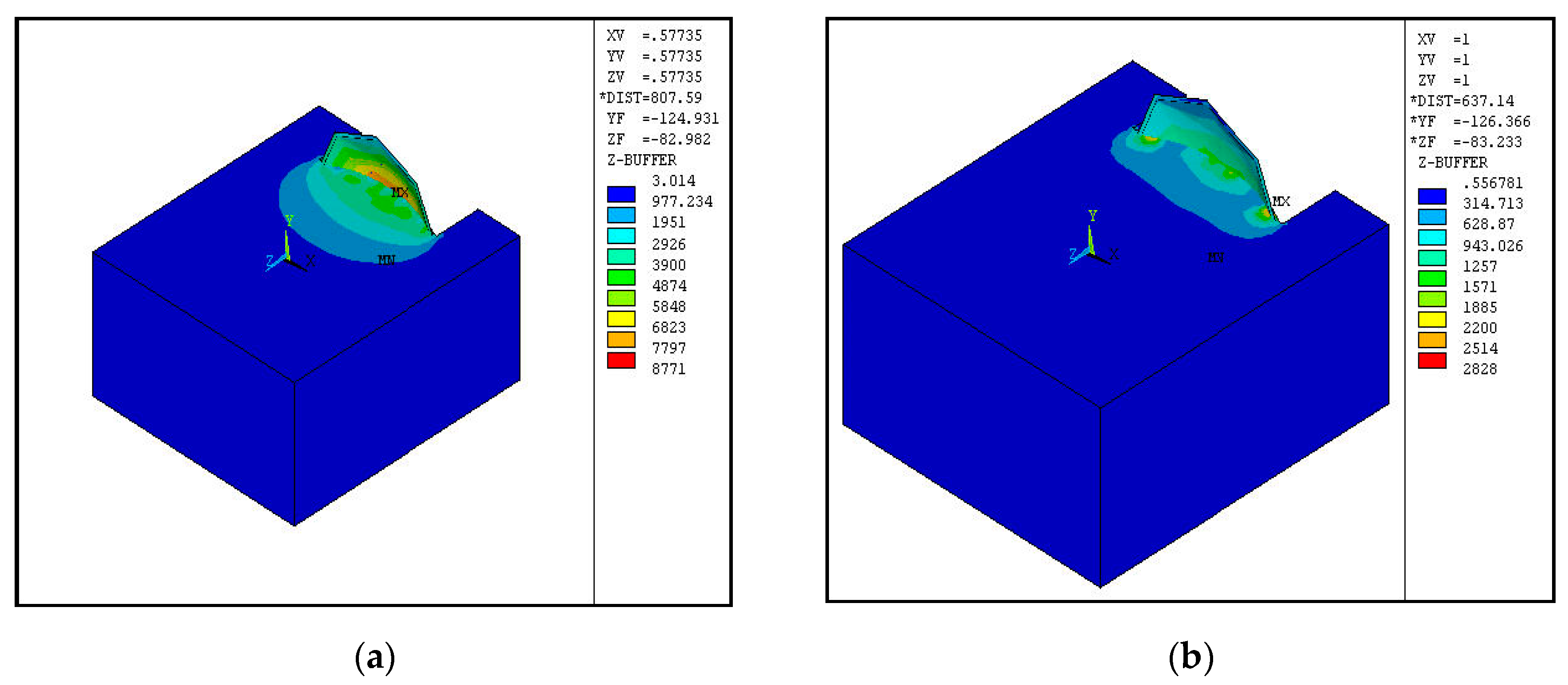
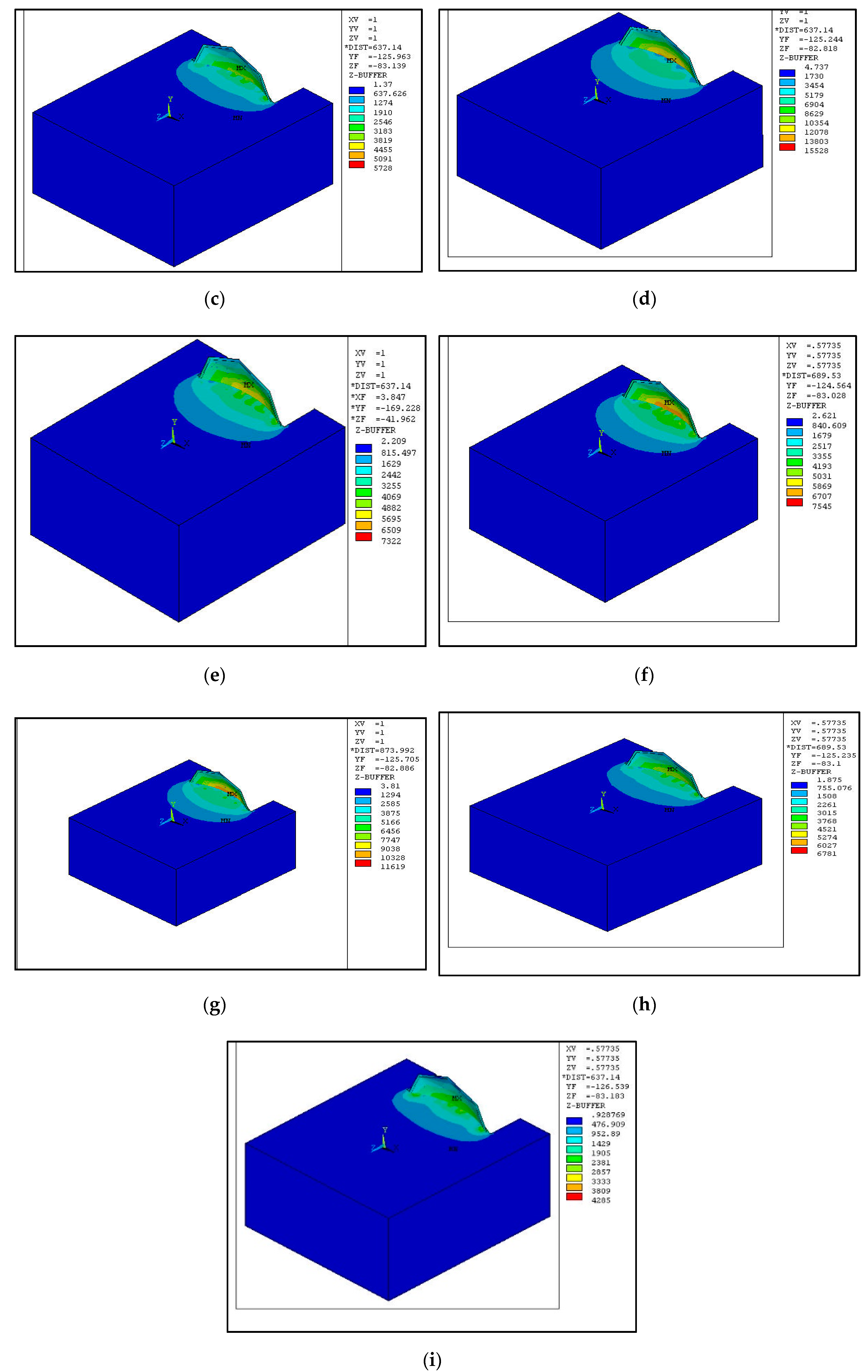
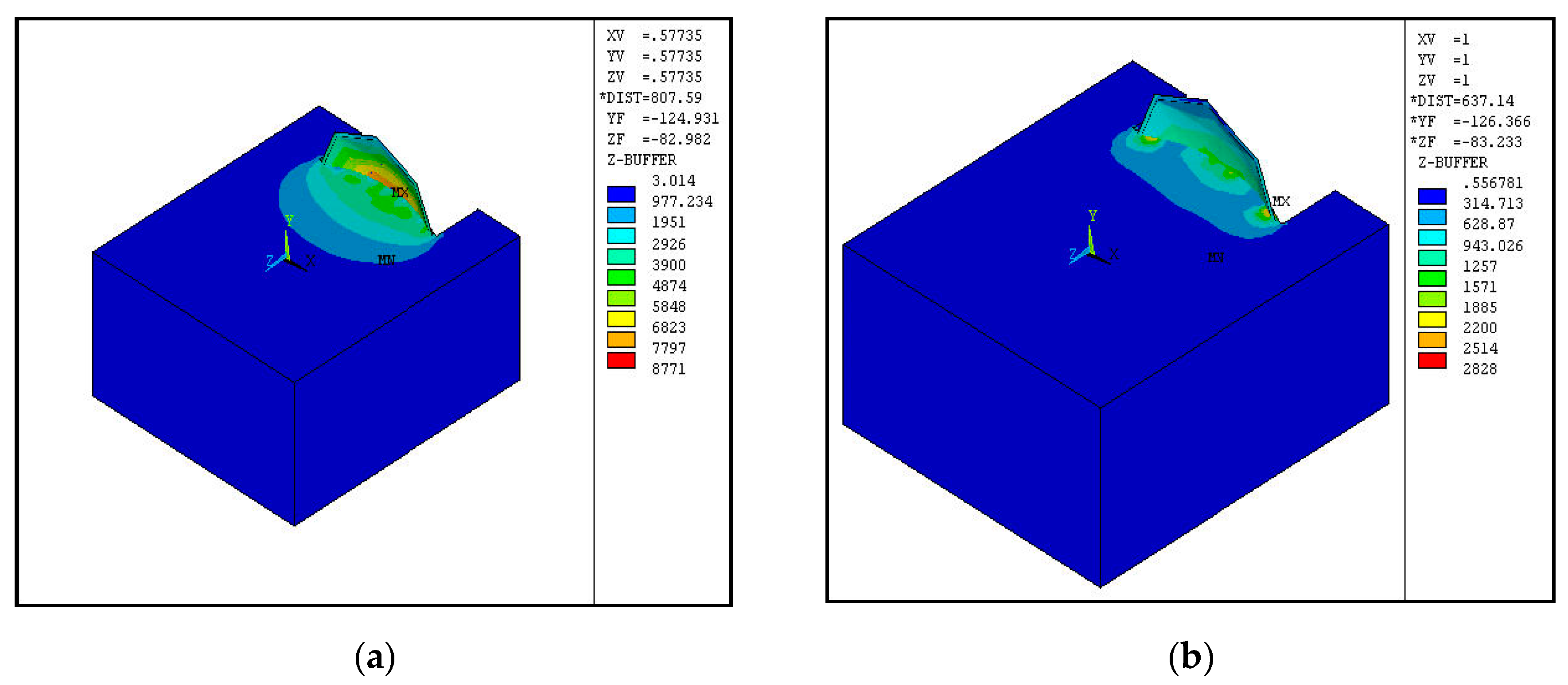
3.1. Von Mises Stress
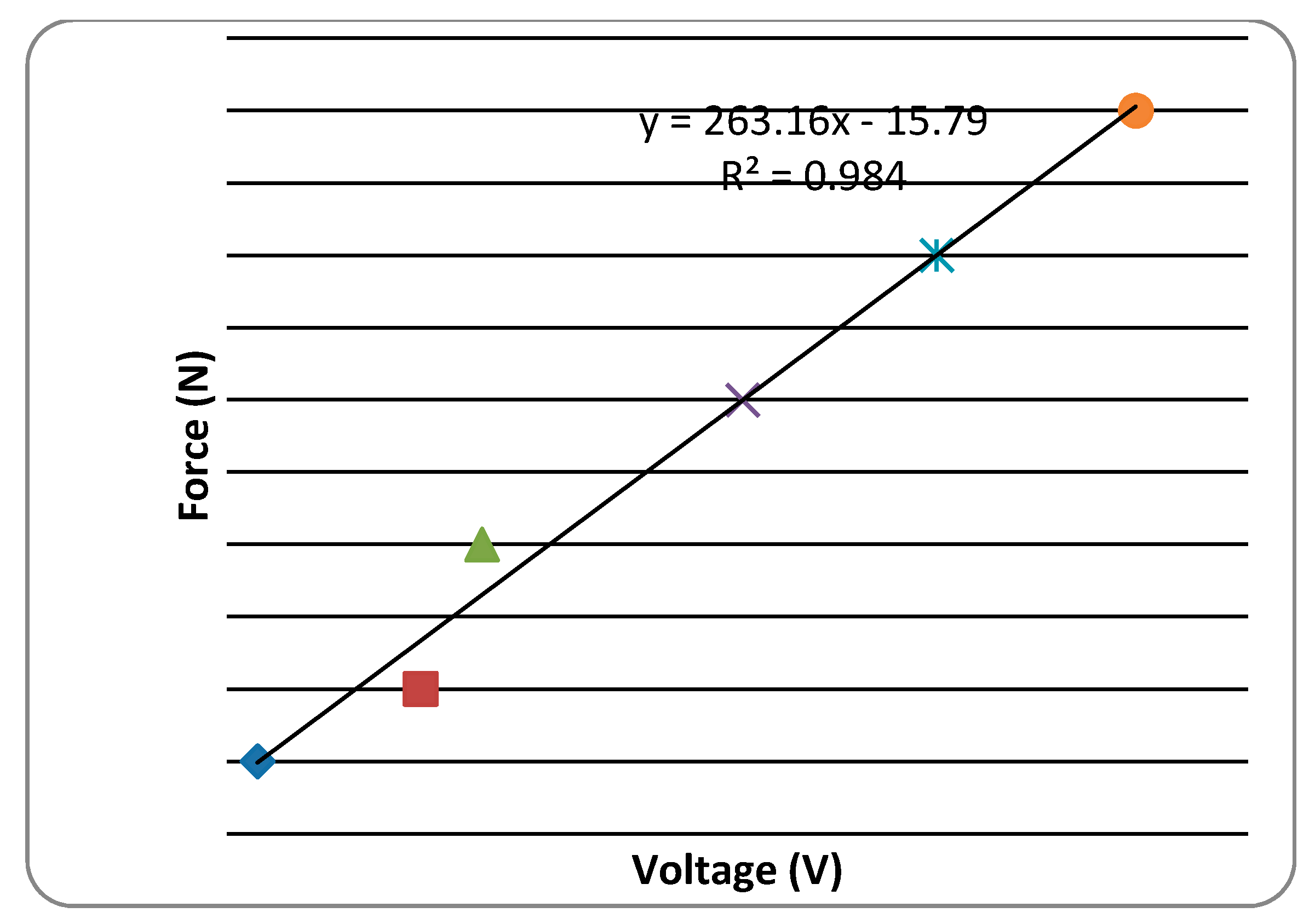
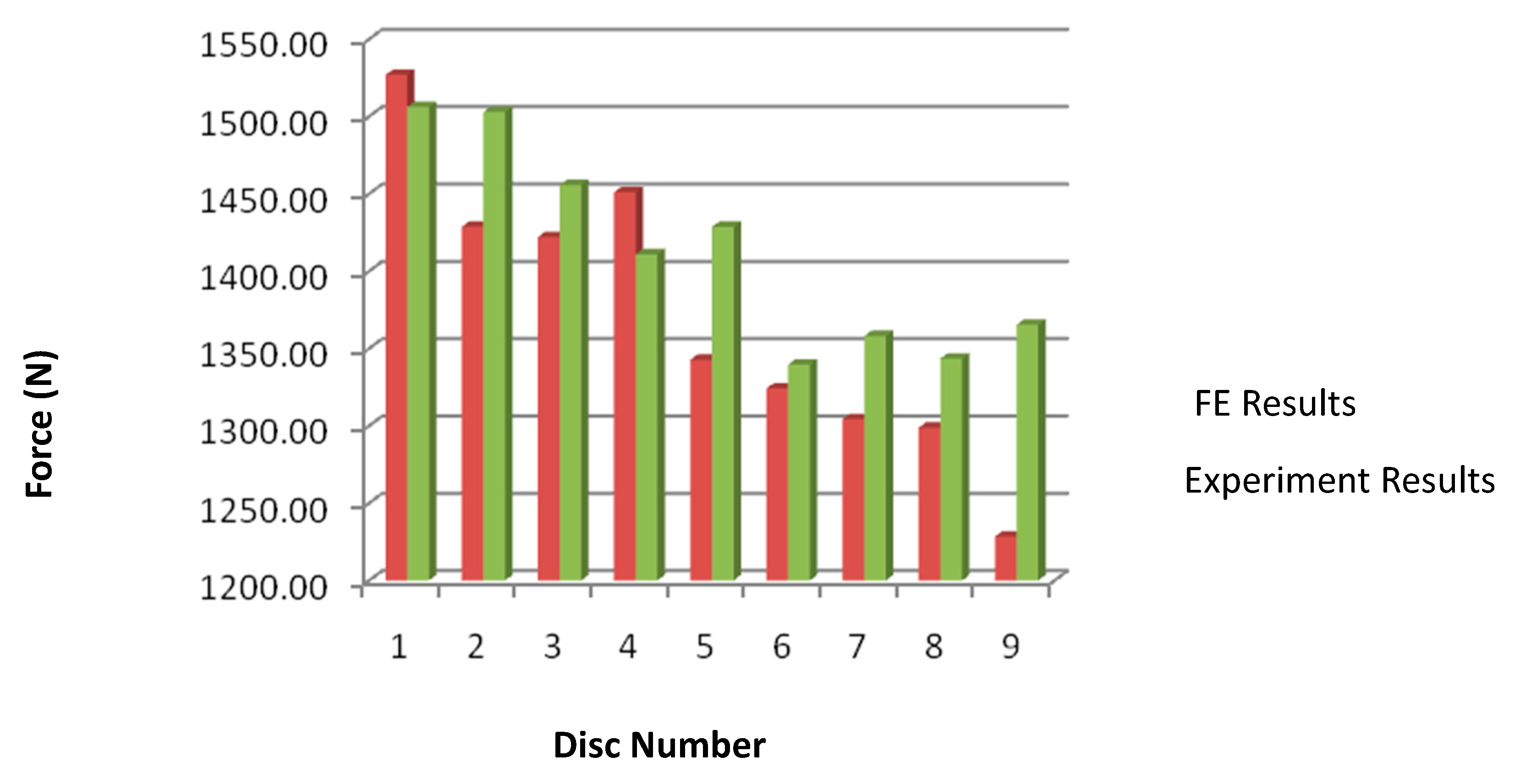
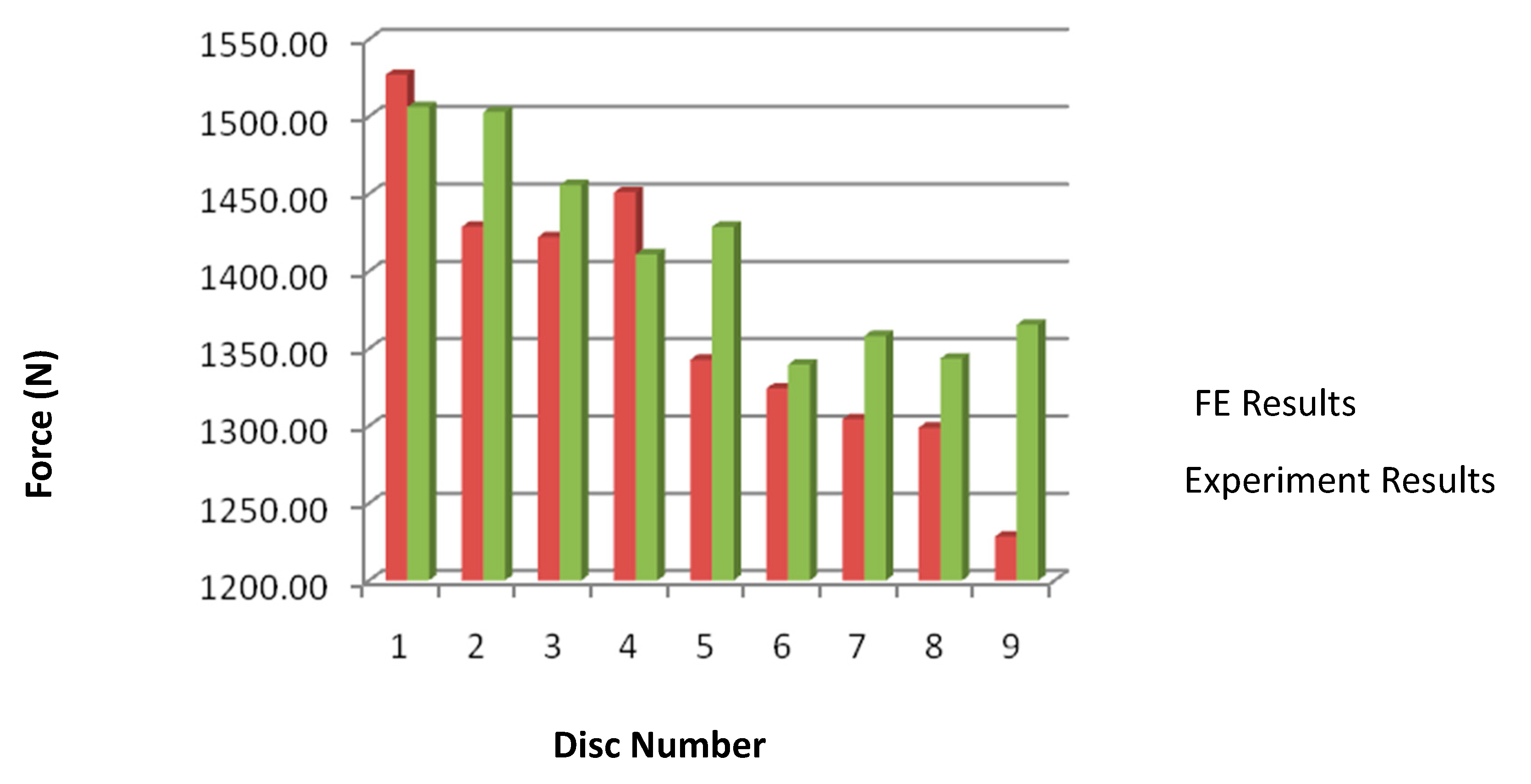
3.2. Derivation of Horizontal Force
4. Conclusions
Acknowledgments
Conflicts of Interest
References
- Nidal, H.A.; Randall, C.R. A nonlinear 3D finite element analysis of the soil forces acting on a disc plough. Soil Tillage Res. 2003, 74, 115–124. [Google Scholar]
- Jean, R.E.; Christel, A.; Michel, B.; Guy, R. Tillage and soil ecology: Partners for sustainable agriculture. Soil Tillage Res. 2010, 111, 33–40. [Google Scholar]
- Naderloo, L.; Alimadani, R.; Akram, A.; Javadikia, P.; Khanghah, Z.H. Tillage depth and forward speed effects on draft of three primary tillage implements in clay loam soil. J. Food Agric. Environ. 2009, 7, 382–385. [Google Scholar]
- Al-Suhaibani, S.A.; Ghaly, A.E. Effect of plowing depth of tillage and forward Speed on the Performance of a Medium Size Chisel Plow Operating in a Sandy Soil American. J. Agric. Biol. Sci. 2010, 5, 247–255. [Google Scholar] [CrossRef]
- Zhang, X.R.; Wang, C.; Chen, Z.H.; Zeng, Z.W. Design and experiment of a bionic vibratory subsoiler for banana fields in southern China. Int. J. Agric. Biol. Eng. 2016, 9, 75–83. [Google Scholar]
- Li, J.Q.; Kou, B.X.; Liu, G.M.; Fan, W.F.; Liu, L.L. Resistance reduction by bionic coupling of the earthworm lubrication function. Sci. China Tech. Sci. 2010, 53, 2989–2995. [Google Scholar] [CrossRef]
- Vincent, J.F.V.; Mann, D.L. Systematic technology transfer from biology to engineering. Philos. Trans. R. Soc. 2002, 360, 159–173. [Google Scholar] [CrossRef] [PubMed]
- Mouazen, A.M.; Nemenyi, M. Tillage tool design by finite element method: Part 1. Finite element modeling of soil plastic behavior. J. Agric. Eng. Res. 1999, 72, 37–51. [Google Scholar] [CrossRef]
- David, T.; Krishnamoorthy, R.; Cahyadi, B.I. Finite element modelling of soil-structure interaction. J. Teknol. 2015, 76, 59–63. [Google Scholar] [CrossRef]
- Wilson, K.J.; Guanabara, A.S. Methodology for product design based on the study of bionics. Mater. Des. 2005, 26, 149–155. [Google Scholar]
- Zhang, Z.J.; Jia, H.L.; Sun, J.Y. Bioinspired design of a ridging shovel with anti-adhesive and drag reducing. Adv. Mech. Eng. 2015, 7, 1–11. [Google Scholar] [CrossRef]
- Li, J.Q.; Sun, J.R.; Ren, L.Q.; Chen, B.C. Sliding resistance of plates with bionic bumpy surface against soil. J. Bionics Eng. 2004, 1, 207–214. [Google Scholar]
- Tong, J.; Moayad, B.Z.; Ma, Y.H.; Sun, J.Y.; Chen, D.H.; Jia, H.L.; Ren, L.Q. Effects of biomimetic surface designs on furrow opener performance. J. Bionics Eng. 2009, 6, 280–289. [Google Scholar] [CrossRef]
- Ren, L.Q.; Deng, S.Q.; Wang, J.C.; Han, Z.W. Design principles of the non-smooth surface of bionic plow moldboard. J. Bionics Eng. 2004, 1, 9–19. [Google Scholar] [CrossRef]
- Ren, L.Q.; Han, Z.W.; Li, J.Q.; Tong, J. Effects of non-smooth characteristics on bionic bulldozer blades in resistance reduction against soil. J. Terramechanics 2003, 40, 221–230. [Google Scholar] [CrossRef]
- Moayad, B.Z. Biomimetic Design and Experimental Research of Resistance-Reducing Surfaces of Soil-Tool Systems. Ph.D. Thesis, Jilin University, Jilin, China, 25 June 2005. [Google Scholar]
- Chirende, B.; Li, J.Q.; Wen, L.G.; Simalenga, T.E. Effects of bionic non-smooth surface on reducing soil resistance to disc ploughing. Sci. Chin. Tech. Sci. 2010, 53, 2960–2965. [Google Scholar] [CrossRef]
- Tagar, A.A.; Ji, C.; Jan, A.; Julien, M.; Chen, S.; Ding, Q.; Abbasi, N.A. Finite element simulation of soil failure patterns under soil bin and field testing conditions. Soil Tillage Res. 2015, 145, 157–170. [Google Scholar] [CrossRef]
- Ren, L.Q. Progress in the bionic study on anti-adhesion and resistance reduction of terrain machines. Sci. Chin. Tech. Sci. 2009, 52, 273–284. [Google Scholar] [CrossRef]
- Mouazen, A.; Neményi, M. A review of the finite element modelling techniques of soil tillage. Math. Comput. Simul. 1998, 48, 23–32. [Google Scholar] [CrossRef]
- Ren, L.Q.; Li, J.Q.; Chen, B.C. Unsmoothed surface on reducing resistance by bionics. Chin. Sci. Bull. 1995, 40, 1077–1080. [Google Scholar]
- Zhang, Z.J.; Jia, H.L.; Sun, J.Y. Review on application of biomimetic for designing soil-engaging tillage implements in Northeast China. Int. J. Agric. Biol. Eng 2016, 9, 12–21. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Soil Type | Bulk Density (kg/m3) | Cohesion (kPa) | Internal Friction (Degrees) | Soil Metal Friction (Degrees) | Angle of Dilation (Degrees) | Modulus of Elasticity (Pa) | Poisson’s Ratio |
|---|---|---|---|---|---|---|---|
| Black Loamy Soil | 1620 | 10 | 34 | 23 | 4 | 8.067 × 106 | 0.35 |
| Particle Size (mm) | 0.074–0.05 | 0.05–0.01 | 0.01–0.005 | 0.005–0.002 |
|---|---|---|---|---|
| Weight (%) | 33 | 42.5 | 15.5 | 9 |
| Disc Number | Disc Surface | Depth/Height | Density | FE Force (N) | Experiment Force (N) | (% Difference) |
|---|---|---|---|---|---|---|
| 1 | Plain | 0 mm | 0% | 1526.87 | 1506.07 | 1.38 |
| 2 | Concave | 1 mm deep | 10% | 1428.67 | 1502.81 | −4.93 |
| 3 | Concave | 1 mm deep | 30% | 1422.00 | 1455.63 | −2.31 |
| 4 | Concave | 3 mm deep | 10% | 1450.92 | 1410.85 | 2.84 |
| 5 | Concave | 3 mm deep | 30% | 1342.65 | 1428.59 | −6.02 |
| 6 | Convex | 1 mm high | 10% | 1324.05 | 1339.55 | −1.16 |
| 7 | Convex | 1 mm high | 30% | 1304.21 | 1358.05 | −3.96 |
| 8 | Convex | 3 mm high | 10% | 1298.78 | 1343.49 | −3.33 |
| 9 | Convex | 3 mm high | 30% | 1228.38 | 1365.34 | −10.03 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chirende, B.; Li, J.Q.; Vheremu, W. Application of Finite Element Analysis in Modeling of Bionic Harrowing Discs. Biomimetics 2019, 4, 61. https://doi.org/10.3390/biomimetics4030061
Chirende B, Li JQ, Vheremu W. Application of Finite Element Analysis in Modeling of Bionic Harrowing Discs. Biomimetics. 2019; 4(3):61. https://doi.org/10.3390/biomimetics4030061
Chicago/Turabian StyleChirende, Benard, Jian Qiao Li, and Wonder Vheremu. 2019. "Application of Finite Element Analysis in Modeling of Bionic Harrowing Discs" Biomimetics 4, no. 3: 61. https://doi.org/10.3390/biomimetics4030061
APA StyleChirende, B., Li, J. Q., & Vheremu, W. (2019). Application of Finite Element Analysis in Modeling of Bionic Harrowing Discs. Biomimetics, 4(3), 61. https://doi.org/10.3390/biomimetics4030061