1. Introduction
The rotary table plays a crucial role in the field of high-precision angle measurement. They can be broadly classified as mechanical, electromagnetic, and photoelectric, with photoelectric rotary tables being the most widely used, offering the advantages of high accuracy [
1], a wide measurement range, and high immunity to interference. The photoelectric rotary table consists of a rotating shaft, a photoelectric reading head, and an internal circular grating. During the rotation process, the relative movement of the grating pair produces a changing moiré fringe, and the moiré signal corresponds to the displacement output by the photoelectric reading head [
2]. There are quite a few factors affecting the accuracy of the rotary table [
3], which can be roughly divided into inherent error and application-dependent error [
4], of which the eccentricity error in the application-dependent error is the most important factor affecting the accuracy of angle measurement [
5,
6,
7]; therefore, separating the eccentricity error is of great value to ensure the accuracy of the rotary table.
The separation methods for the eccentricity error of the rotary table can be divided into two types [
8,
9,
10,
11]. One is based on the fundamental circumferential closure property, wherein external calibration devices are used to separate the eccentricity error components of the rotary table by calibrating the discrete positioning error curve of the entire circumference of the rotary table. Chen Xi-jun et al. [
12] established the moiré fringe equation with eccentricity error, derived the equation of angle measurement error caused by eccentricity error, calibrated rotary table using a polyhedral prism, fitted the angle measurement error equation of the rotary table and the eccentricity error of the rotary table, and improved the measurement accuracy range from (−7.0″, 1.1″) to (−1.9″, 1.0″) with the error compensation. Mi Xiao-tao et al. [
13] analyzed the relationship between the angular measurement results and the error caused by the eccentricity error, calibrated the discrete angular measurement error using a polyhedral prism and autocollimator, fitted the angular measurement error function through the least squares fitting method, separated the eccentricity error of the circular grating, and significantly reduced the angle-measurement error range by correcting from (−31.6″, 41.7″) to (−1.0″, 1.2″). Zheng Da-teng, et al. [
14] established the relationship model between the eccentricity error and the angle measurement error of AACMM (Articulated Arm Coordinate Measuring Machine), calibrated the angle measurement error with a polyhedral prism, fitted the compensation function of the angle measurement error and the eccentricity error with a nonlinear least squares method, and increased the measurement accuracy by 44.6% with correction of eccentricity errors.
The advantage of this kind of method is that it can ensure high accuracy in separating the eccentricity error, and its disadvantage is that during the separation process, due to the use of calibration instruments, such as a polyhedral prism and autocollimator, the requirements of the operating environment and the proficiency are high, and there are cumbersome steps in the operation and subsequent processing.
Another kind of method was realized with various sensors to achieve eccentricity error separation in the rotary table [
15,
16,
17]. Ai Cheng-guang et al. [
18] proposed an eccentricity error separation model based on non-diametric dual reading heads, compared the phase difference of the moiré signals received by the dual reading heads, separated the eccentricity error and the eccentricity error direction of the circular grating in the platform by synthesizing the Lissajous graph of the signals, corrected the testing system based on the derived compensation formula, and increased the circular angle accuracy by nearly five times. Feng Chao-peng et al. [
19] developed a model for the eccentricity error of dual reading heads, derived a self-calibration equation for the eccentricity error parameters of a circular grating based on the dual reading heads, and solved for the eccentricity error parameters by experimentally self-calibrating the eccentricity error parameters of a circular grating with double reading heads installed diametrically opposite, thereby achieving the separation of the eccentricity error of a circular grating. The error of the circular grating decreased from 0.0464° before compensation to 0.0037° after compensation. A fast least squares fitting method for calculating eccentricity error was proposed by Zhu San-ying et al. [
20], who combined a laser displacement sensor with the proposed fast algorithm to accurately separate the eccentricity error of the device 40–50% faster than the calculation of LSF (least squares fitting). Wang Ya-zhou et al. [
21] proposed a grating eccentricity error detection system based on image-based angular displacement measurement and used two pairs of diameter image sensors to separate the grating eccentricity error, reducing the root mean square error from 1017″ to 12.8″.
While these kinds of methods reduce the complexity of separating eccentricity errors, they have the disadvantage of requiring multiple sensors to obtain information on the eccentricity error. During the operation process, it is usually necessary to expose the rotating shaft and grating disc, which increases the risks to the internal precision structure of the rotary table and reduces angle measurement accuracy.
In summary, the existing two kinds of eccentricity error separation methods either rely on external instrument equipment or require multiple sensors and exposed turntable structures. Focusing on the limitations of the current methods, a new method for separating eccentricity error is proposed in this paper. This method neither relies on external equipment nor exposes the internal structure of the rotary table, and can separate the eccentricity error only using a single reading head of the rotary table. By establishing a grating pair transmission model, the influence of eccentricity error on the phase feature of the moiré signal in the rotation course of the rotary table is clarified; thereby, a model for the relationship between the phase spectrum components and eccentricity error is established. The verification and comparison experiments of the eccentricity error separation method are carried out based on the laboratory-made circuit system, and the experimental results prove the effectiveness and accuracy of the proposed method. The new method has the advantages of low cost, simple steps, low environmental requirements, and little impact on the rotary table.
In the first part of the introduction, the background and significance of the research on eccentricity error separation are introduced, the classification and related achievements of eccentricity error separation methods for the rotary table are described in detail, and the innovation and research content of this paper are clearly and accordingly expressed. In the second part, the principle of the photoelectric rotary table is explained first. The grating transmission model and displacement error model caused by eccentricity error are established. The relationship between eccentricity error and the phase characteristics of the moiré signal is demonstrated, and the correctness and feasibility of the eccentricity error separation method proposed in this paper are proved. In the third part, the functional effectiveness of the experiment of the laboratory-made circuit board for collecting moiré signals is proved first. The experimental system and equipment are described in detail. By comparing the results of eccentricity error obtained by the proposed method in this paper with those of external calibration instruments, the accuracy and effectiveness of the method proposed in this paper are proved. In the first part of the conclusion, the full text is summarized, and the promotion value and application occasions of the proposed method are demonstrated.
2. Model of the Proposed Method
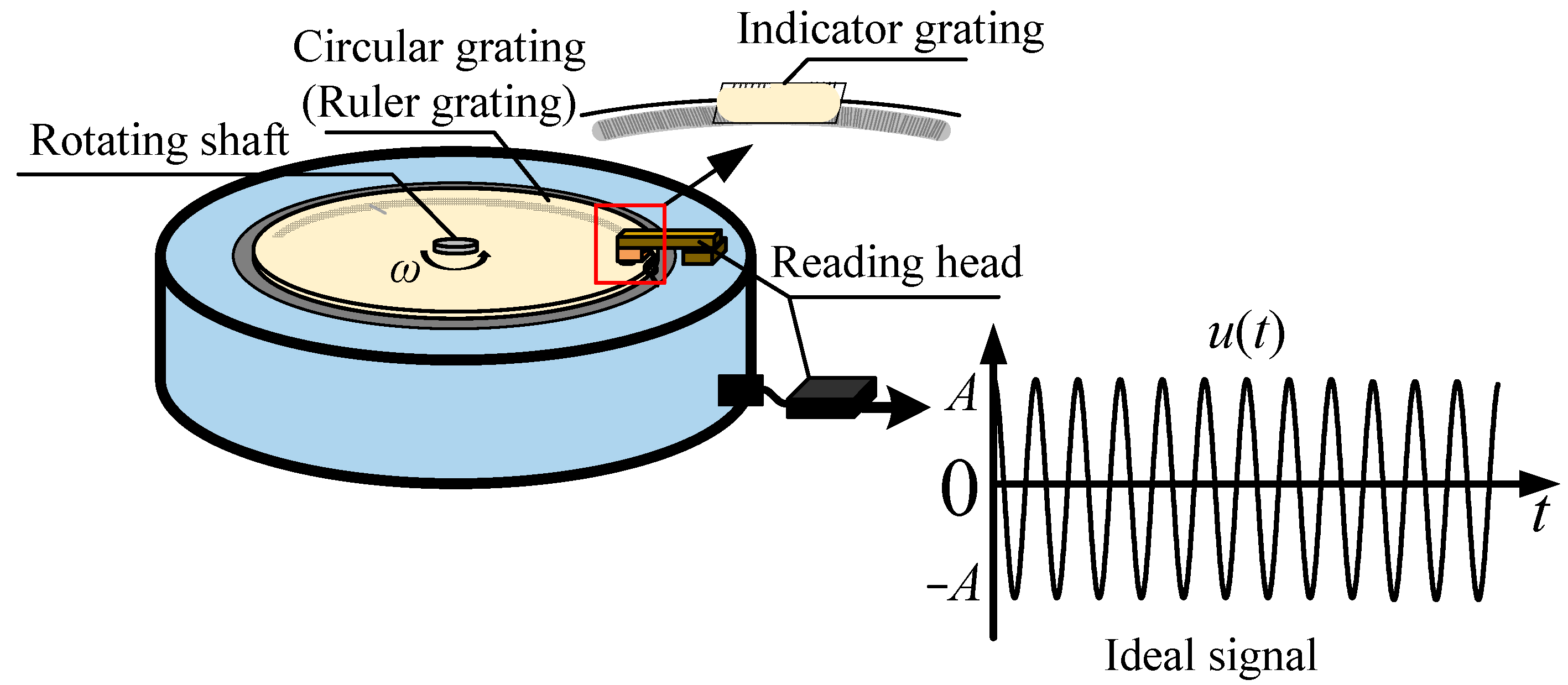
The photoelectric rotary table is mainly composed of a rotating shaft, an internal circular grating, and a grating reading head. The internal grating in the reading head is the indicative grating, and the circular grating is the scale grating. The two of them form the grating pair. The schematic of the structure of the rotary table is shown in
Figure 1.
As shown in
Figure 1, when rotating at a constant speed
ω, the output moiré signal, defined as
u(
t), has a constant frequency and amplitude. The period of
u(
t) corresponds to the indexing angle of the grating line.
Due to the small receiving field of the reading head, usually at the millimeter level, the indicative grating and scale grating of the rotary table can both be regarded as a single rectangular grating, as shown in
Figure 2.
In the
xoy plane where the grating lines are located, the
x direction is the vertical grating line direction, and the grating lines are evenly distributed. Set the grating pitch is
T, the length of the shading area is
b with the light transmittance is zero, and the length of the light-transmitting area is
a with the light transmittance is equal to one. For the parallel light emitted from the reading head, grating transmission function
L(
x) can be described as:
Extend the Fourier Series on
L(
x), and its complex form can be written as:
where
v is the spatial frequency of the grating and
v = 1/
T,
An is the Fourier coefficient and
n = 0, ±1, ±2, etc. The expression of
An is shown in Equation (3).
where
β =
a/
T. The transmission functions of the scale grating and the indicative grating follow the above basic equation.
In the actual measurement process, the indicative grating and the scale grating do not completely overlap, and there is a certain angle of
γ. The schematic diagram of the relative position of the two gratings is shown in
Figure 3.
When the indicative grating and the scale grating are superimposed, the indicative grating decomposes the incident light into plane wave arrays in different propagation directions, namely expanding the incident light into the amplitude distribution of the cosine primitive. For the scale grating, the plane waves in each direction of the indicative grating are incident waves, that is to say, the indicative grating decomposes the parallel light and the scale grating subsequently modulates the decomposed light field. The transmission functions of
L1(
x) and
L2(
x,
y) of the two gratings can be expressed as:
where
v1 and
v2 are the spatial frequencies of the indicative grating and scale grating, respectively.
An and
Bm are the Fourier Series of the two transmission functions, respectively. The transmission function
M(
x,
y) of the moiré fringe composed of the scale grating and the indicative grating is:
Equation (5) is the transmission function of the grating pair inside the rotary table under ideal conditions.
In an actual working situation, the rotary table is affected by factors such as mechanical wear and installation errors, and thus the internal attitude will deviate. The actual structure of the internal section of the rotary table and the output moiré signal, which is defined as
u’(
t), is shown in
Figure 4.
It can be seen from
Figure 4 that due to the change in the internal attitude of the rotary table, the relative position of the indicative grating and the scale grating is displaced. The output light intensity of the incident light irradiated in the grating pair changes, and subsequently, the output moiré signal is different from the ideal moiré signal. The difference in amplitude and phase between the output moiré signal and the ideal moiré signal is collectively called the feature of moiré signal.
The phase feature of the moiré signal, defined as
φm(
t), is used to realize the eccentricity error separation of the rotary table in this paper. Since the rotary table is affected by quite a few factors in the actual rotation, the
φm(
t) can be regarded as a composite waveform formed by the superposition and mixture of various frequency harmonics, as shown in
Figure 5.
In this figure, Aicos(iωt), i = 1, 2, etc., are the harmonic components of the feature of the moiré signal caused by system error factors of the rotary table, where Ai is the amplitude of the harmonic and i is the order of the harmonic. The feature of moiré signal of the rotary table is formed by the superposition and addition of harmonic components of each order. Since the period of the eccentricity error of the rotary table is 2π, the phase feature of the moiré signal caused by eccentricity error, defined as φme(t), corresponds to the first-order component of φm(t), which accounts for the largest proportion in the feature of moiré signal, and has the greatest influence on the amplitude and phase of the moiré signal.
The schematic diagram of the displacement error of the rotary table affected by the eccentricity error is shown in
Figure 6.
As shown in
Figure 6, when the rotary table rotates at the speed of
ω, due to the eccentricity error, defined as
e, the grating rotation center, R, and the geometric center,
O, do not coincide. A displacement error, defined as
Le(
θ), will be generated during the rotation of the grating with the rotary table.
Establish the x-axis from the grating rotation center, R, to the reading head in the positive direction. The intersection point between the outer side of the marking line of the circular grating and the positive semi-axis of the x-axis is defined as P. Subsequently, OP is the radius of the grating, and the variation of RP with the angular position of the rotary table, θ, is defined as Le(θ), namely, the displacement error of the rotary table.
Since
OD⊥
RP, as well as
RO and
RD, are at a micro level in actual working conditions, it is thus clear that:
The
Le(
θ) can be described as:
Le(
θ), which is introduced by the eccentricity error of the rotary table, will affect the transmission function of the grating pair of the rotary table. The transmission function of the scale grating affected by the eccentricity error, defined as
L2(
x −
x′(
θ),
y), can be expressed as:
where
x′(
θ) is the relative displacement of the two gratings, which is changing with
θ, caused by the attitude error of the rotary table. At this time, the transmission function of the moiré fringe composed of the scale grating and the indicative grating,
M(
x,
y), can be described as:
The moiré fringe consists of contents produced by the beat phenomenon between two gratings. The content of the largest spatial period in the light intensity distribution constitutes the fundamental wave of the moiré fringe, and the general expression of the largest period moiré fringe produced by the beat phenomenon is obtained by taking
m = −
n in Equation (9).
In Equation (10),
Vx and
Vy are the components of the spatial frequency of the light intensity function in the
x-axis and
y-axis directions, respectively, and both of them are constants. Defining the intensity of the parallel light emitted from the reading head as
Ir, the outgoing light intensity generated by the light passing through the indicative grating and scale grating, defined as
Ic(
x −
x′(
θ),
y), can be expressed as:
When the photoelectric conversion rate of the photoelectric receiver is
k and the rotational speed of the rotary table is
ω, the output moiré signal by the rotary table,
u′(
t), can be expressed as:
From Equation (12), it can be seen that the rotary table is affected by the eccentricity error during the rotation process, and the introduced phase feature of the moiré signal,
φme(
t), can be expressed as:
When the grating pitch is 20 μm, the spatial frequency
v2 of the scale grating in the rotary table is 1/20 μm. In an actual working condition, the angle of
γ between the indicative grating and the scale grating in the rotary table is insignificant, and the cos
γ in Equation (13) is approximately equal to one, so Equation (13) can be simplified as:
Since
φme(
t) is the first-order component of
φm(
t) in the frequency domain, and the corresponding frequency-domain amplitude is
A(1), according to Equation (14), the relationship between the first-order amplitude,
A(1), and the eccentricity error, e, is as follows:
The expression of the eccentricity error of the rotary table is:
Since v2 is the spatial frequency of the scale grating, which is a constant in a fixed rotary table, it can be seen that the eccentricity error of the rotary table is directly proportional to the first-order component of φm(t) in the frequency domain.

 ,
, 











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}