Approximation of Gaussian Curvature by the Angular Defect: An Error Analysis


{kind=link}
{kind=link}
Abstract
:1. Introduction
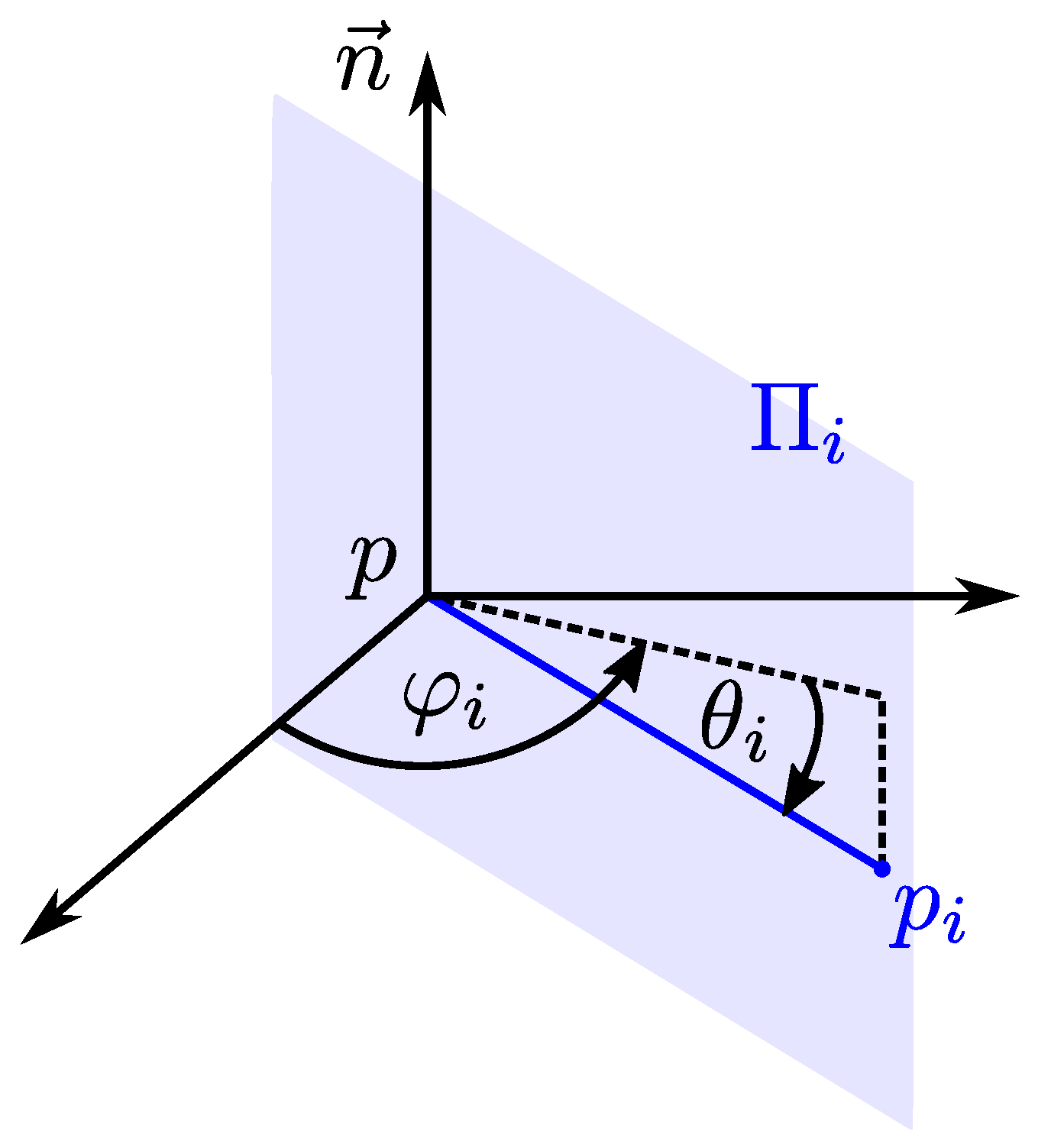
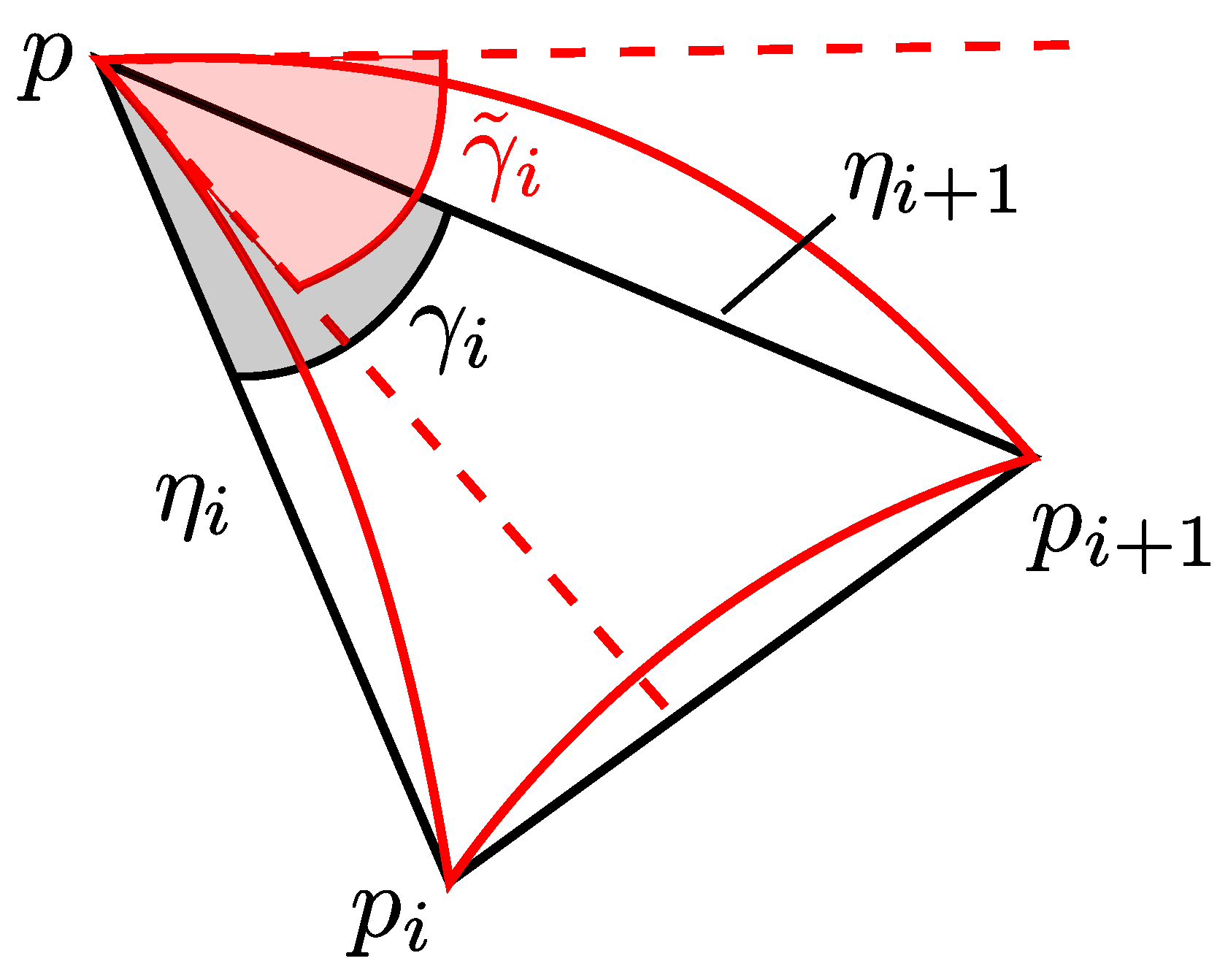
2. Basic Notations
3. The Gauss–Bonnet Scheme
4. Error Analysis
4.1. Preliminary Work
4.2. Acute Triangles
- There exists a positive constant such that .
- There exist two positive constants such that .
4.3. Triangles with Preconditioned Edge Lengths
- There exists a positive constant such that for all i.
- There exist positive constants and such that for all i.
- There exists a positive constant such that .
- There exists a positive constant such that .
- There exist positive constants and such that and , if .
4.4. Sphere
4.5. Counterexample
5. Conclusions
Funding
Acknowledgments
Conflicts of Interest
References
- Magid, E.; Soldea, O.; Rivlin, E. A comparison of Gaussian and mean curvature estimation methods on triangular meshes of range image data. Comput. Vis. Image Underst. 2007, 107, 139–159. [Google Scholar] [CrossRef]
- Surazhsky, T.; Magid, E.; Soldea, O.; Elber, G.; Rivlin, E. A comparison of Gaussian and mean curvature estimation methods on triangular meshes. In Proceedings of the 2003 IEEE International Conference on Robotics and Automation, Taipei, Taiwan, 14–19 September 2003; Volume 1, pp. 1021–1026. [Google Scholar]
- Watanabe, K.; Belyaev, A. Detection of salient curvature features on polygonal surfaces. Eurographics 2001, 20, 53. [Google Scholar] [CrossRef]
- Taubin, G. A signal processing approach to fair surface design. Comput. Graph. 1995, 29, 351–358. [Google Scholar]
- Gatzke, T.D.; Grimm, C.M. Estimating curvature on triangular meshes. Int. J. Shape Model. 2006, 12, 1–28. [Google Scholar] [CrossRef] [Green Version]
- Borrelli, V.; Cazals, F.; Morvan, J.M. On the angular defect on triangulations and the pointwise approximation of curvatures. Comput. Aided Geom. Des. 2003, 20, 319–341. [Google Scholar] [CrossRef]
- Meek, D.S.; Walton, D.J. On surface normal an Gaussian curvature approximations given data sampled from a smoth surface. Comput. Aided Geom. Des. 2000, 17, 521–543. [Google Scholar] [CrossRef]
- Xu, G. Convergence analysis of a discretization scheme for Gaussian curvature over triangular surfaces. Comput. Aided Geom. Des. 2006, 23, 193–207. [Google Scholar] [CrossRef]
- Xu, Z.; Xu, G. Discrete schemes for Gaussian curvature and their convergence. Comput. Math. Appl. 2009, 57, 1187–1195. [Google Scholar] [CrossRef] [Green Version]
- Do Carmo, M.P. Differential Geometry of Curves and Surfaces; Prentice-Hall, Inc.: Englewood Cliffs, NJ, USA, 1976. [Google Scholar]
- Meyer, M.; Desbrun, M.; Schröder, P.; Barr, A.H. Discrete differential-geometry operators for triangulated 2-manifolds. In Visualization and Mathematics III; Springer: Berlin/Heidelberg, Germany, 2003; pp. 35–57. [Google Scholar]
- Pottmann, H.; Wallner, J.; Huang, Q.X.; Yang, Y.L. Integral invariants for robust geometry processing. Comput. Aided Geom. Des. 2009, 26, 37–60. [Google Scholar] [CrossRef]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hartig, M.-S. Approximation of Gaussian Curvature by the Angular Defect: An Error Analysis. Math. Comput. Appl. 2021, 26, 15. https://doi.org/10.3390/mca26010015
Hartig M-S. Approximation of Gaussian Curvature by the Angular Defect: An Error Analysis. Mathematical and Computational Applications. 2021; 26(1):15. https://doi.org/10.3390/mca26010015
Chicago/Turabian StyleHartig, Marie-Sophie. 2021. "Approximation of Gaussian Curvature by the Angular Defect: An Error Analysis" Mathematical and Computational Applications 26, no. 1: 15. https://doi.org/10.3390/mca26010015
APA StyleHartig, M.-S. (2021). Approximation of Gaussian Curvature by the Angular Defect: An Error Analysis. Mathematical and Computational Applications, 26(1), 15. https://doi.org/10.3390/mca26010015