
Study on Speed Planning of Signalized Intersections with Autonomous Vehicles Considering Regenerative Braking


Abstract
:1. Introduction
2. Establishment of Simulation Model of HERBS
2.1. Mathematical Model of Motor
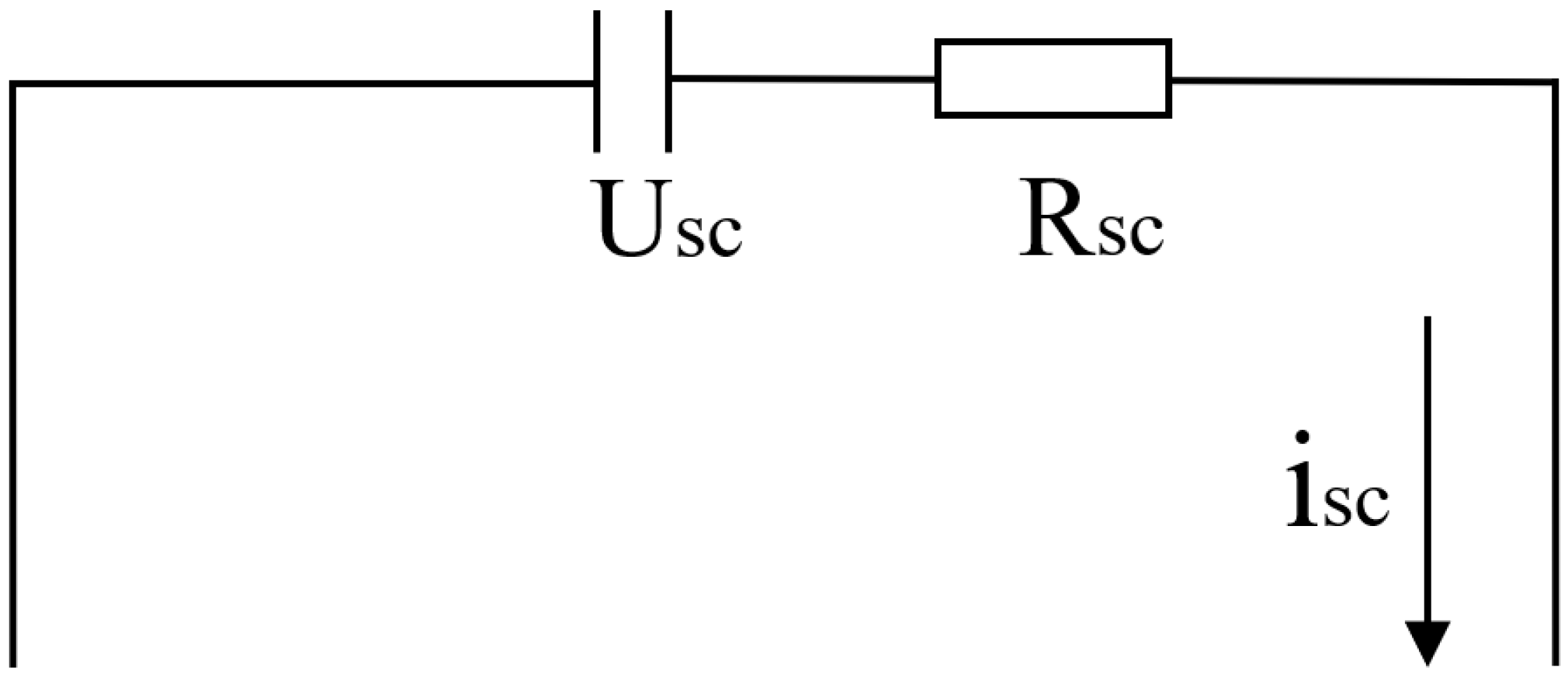
2.2. Mathematical Model of Supercapacitor
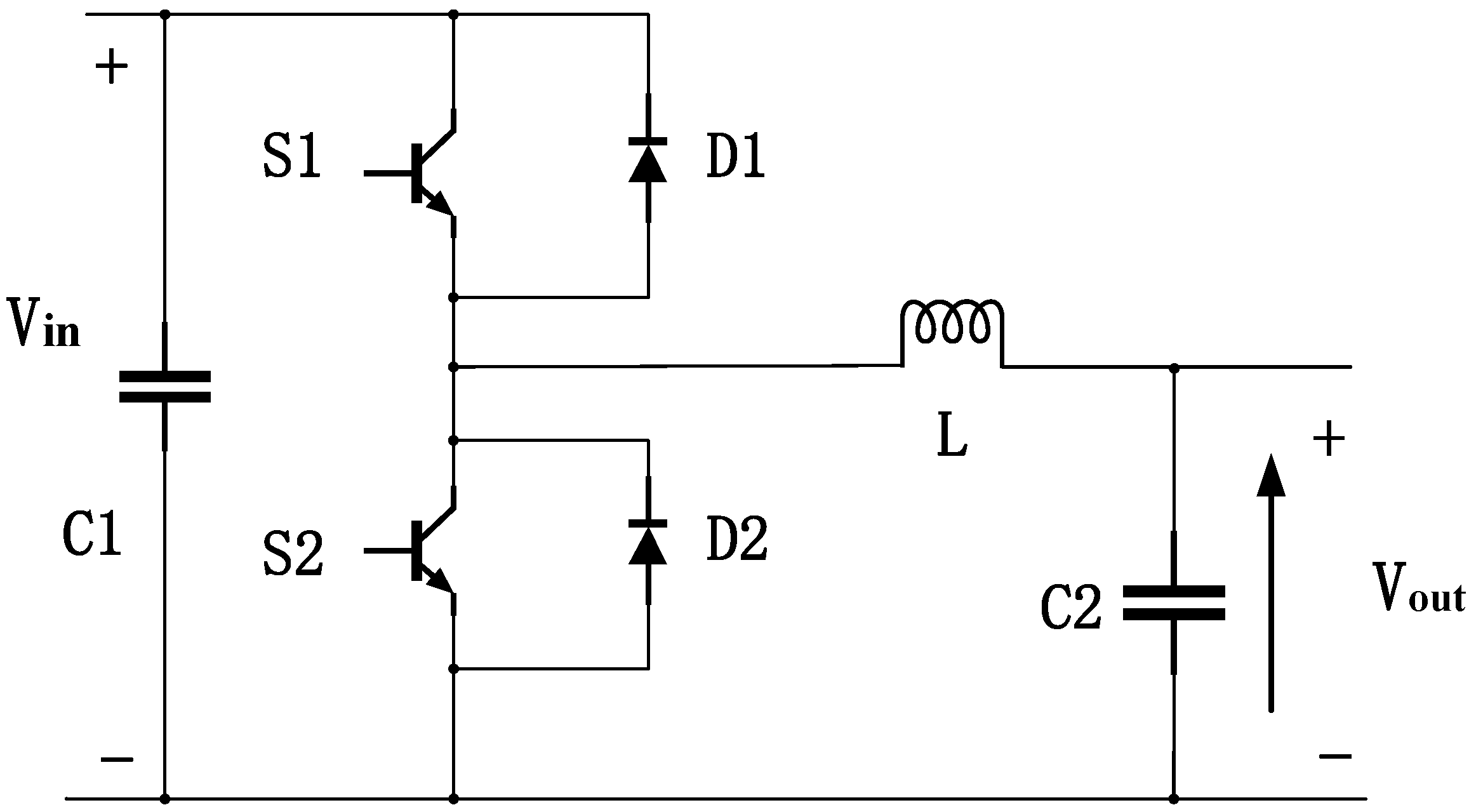
2.3. Bidirectional DC/DC Model
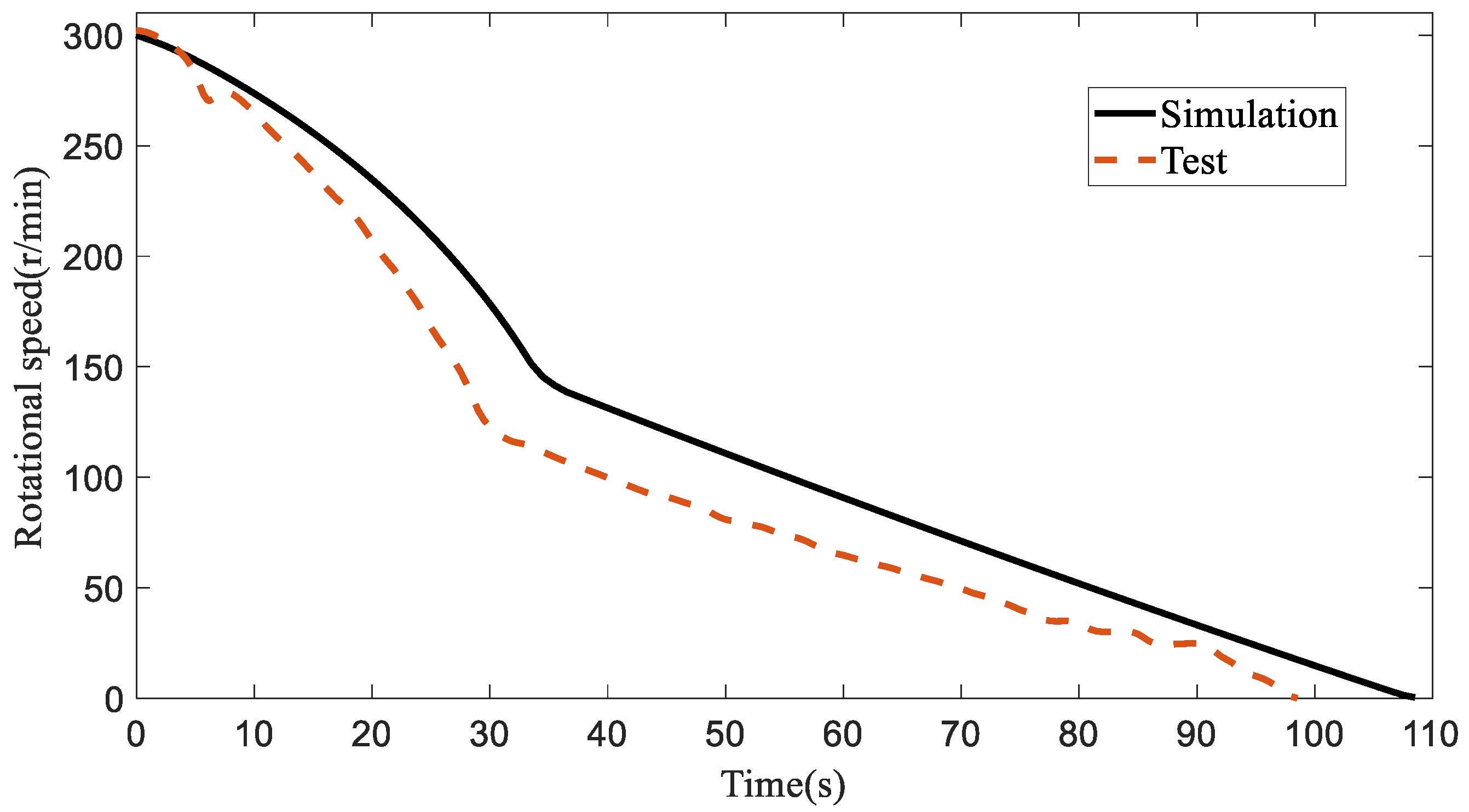
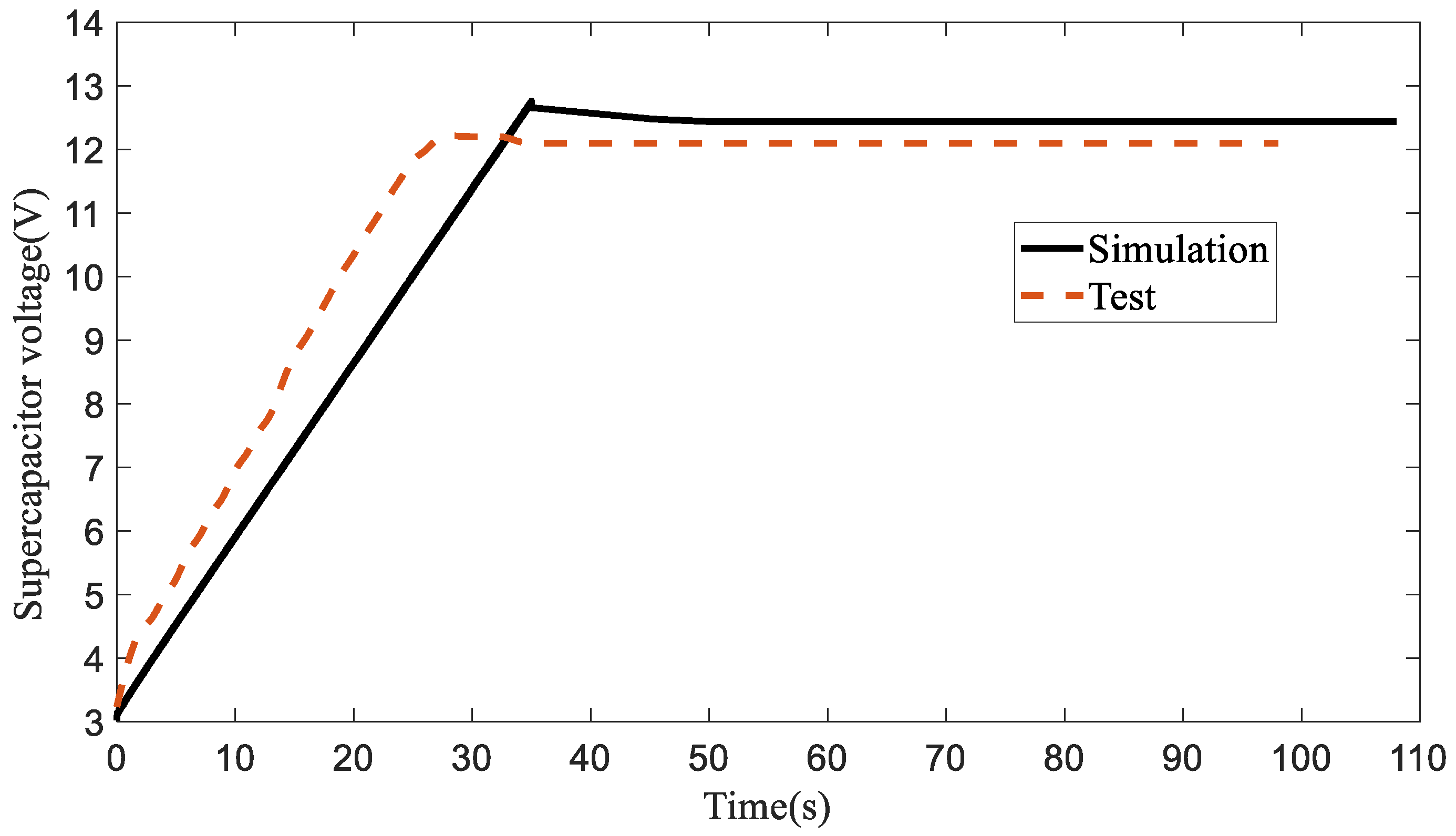
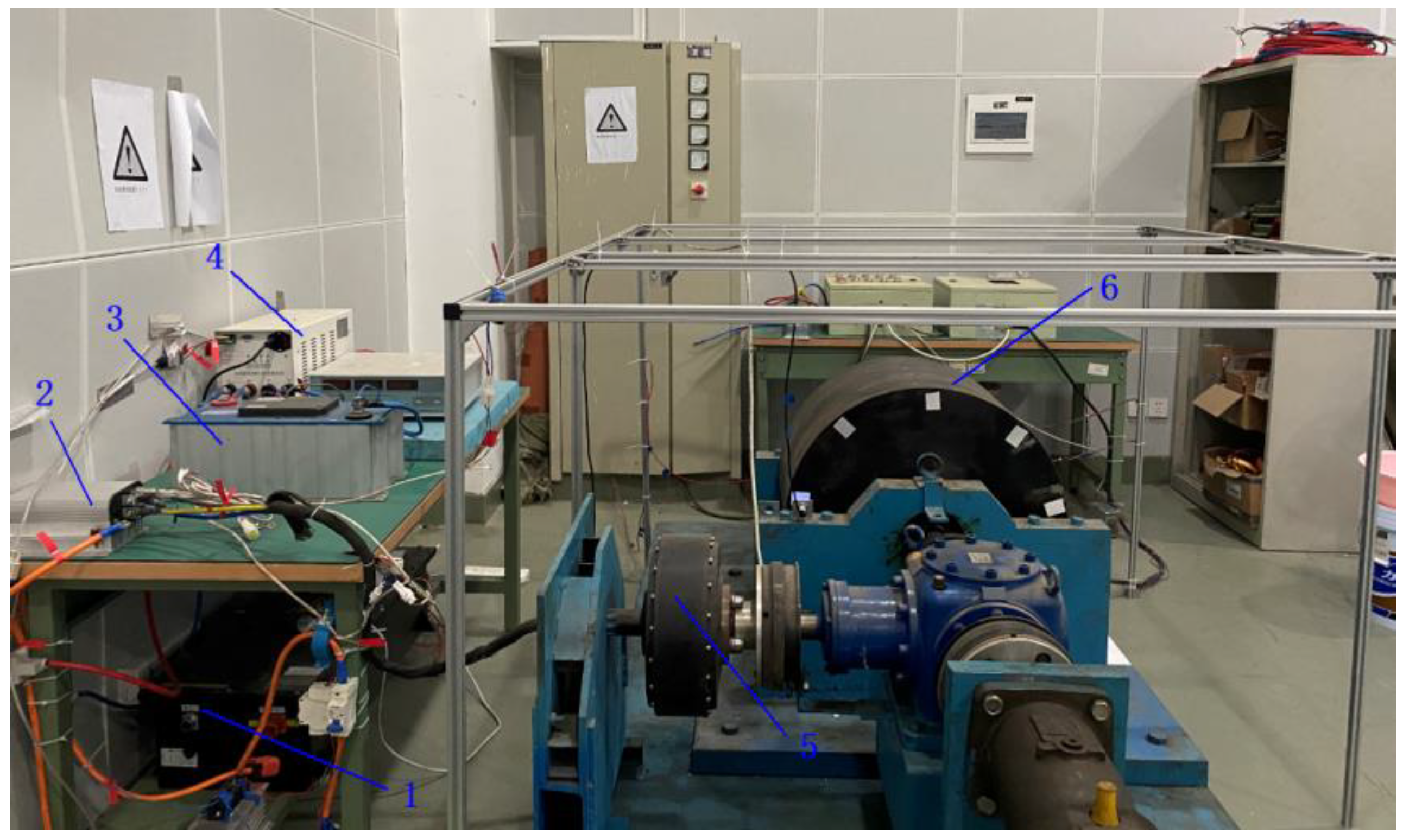
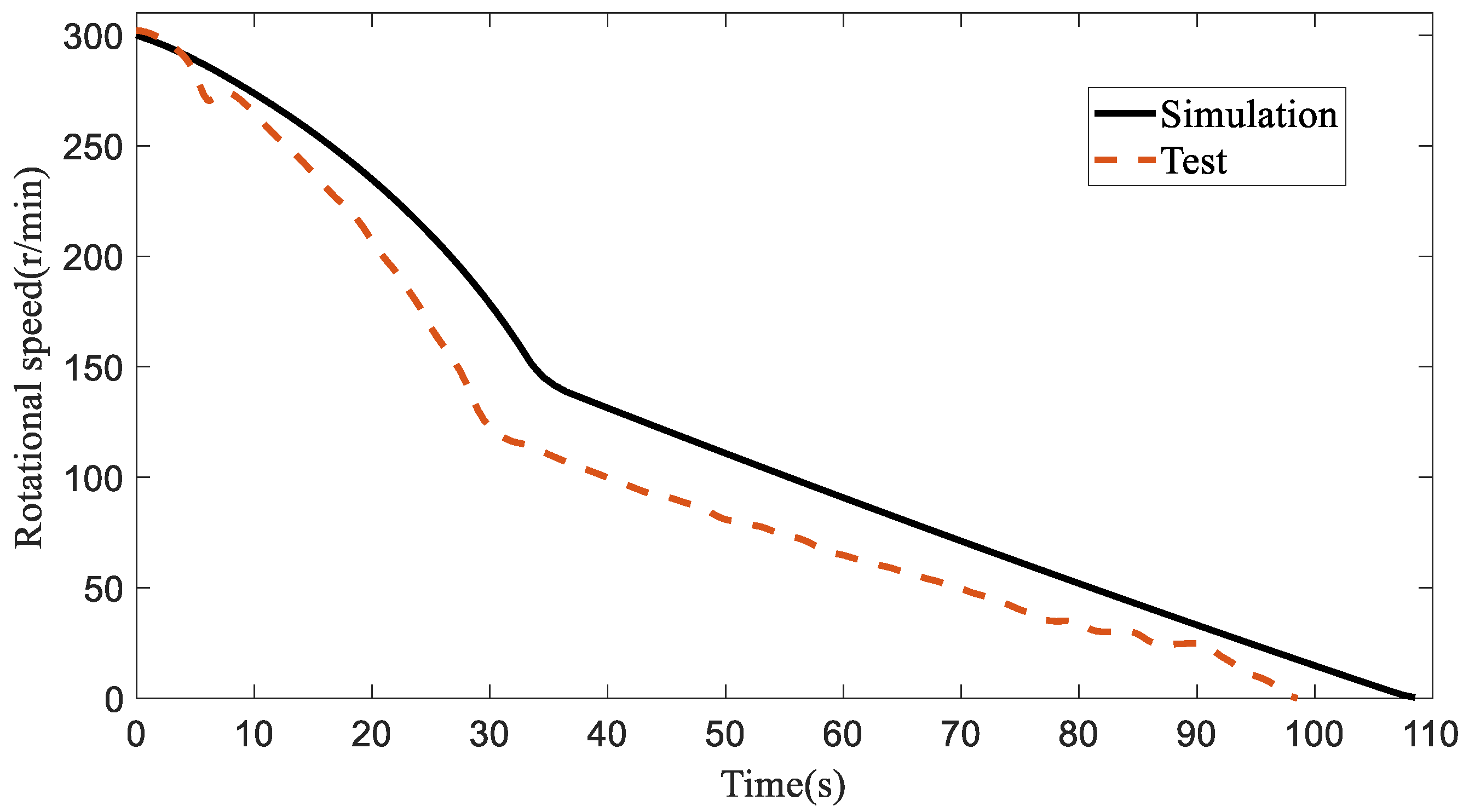
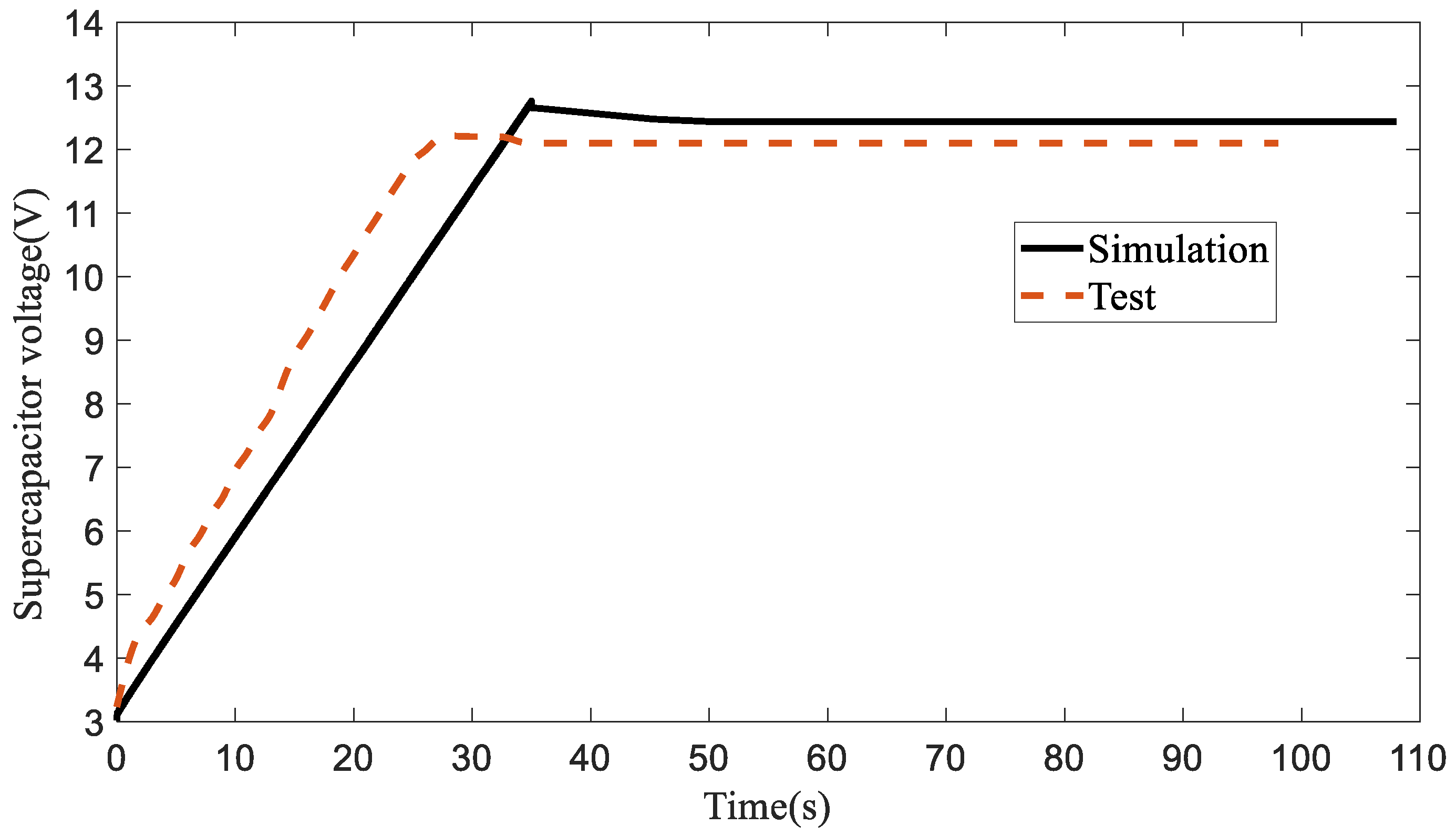
2.4. Simulation and Verification of HERBS
3. Establishment of Vehicle Model of HERBS
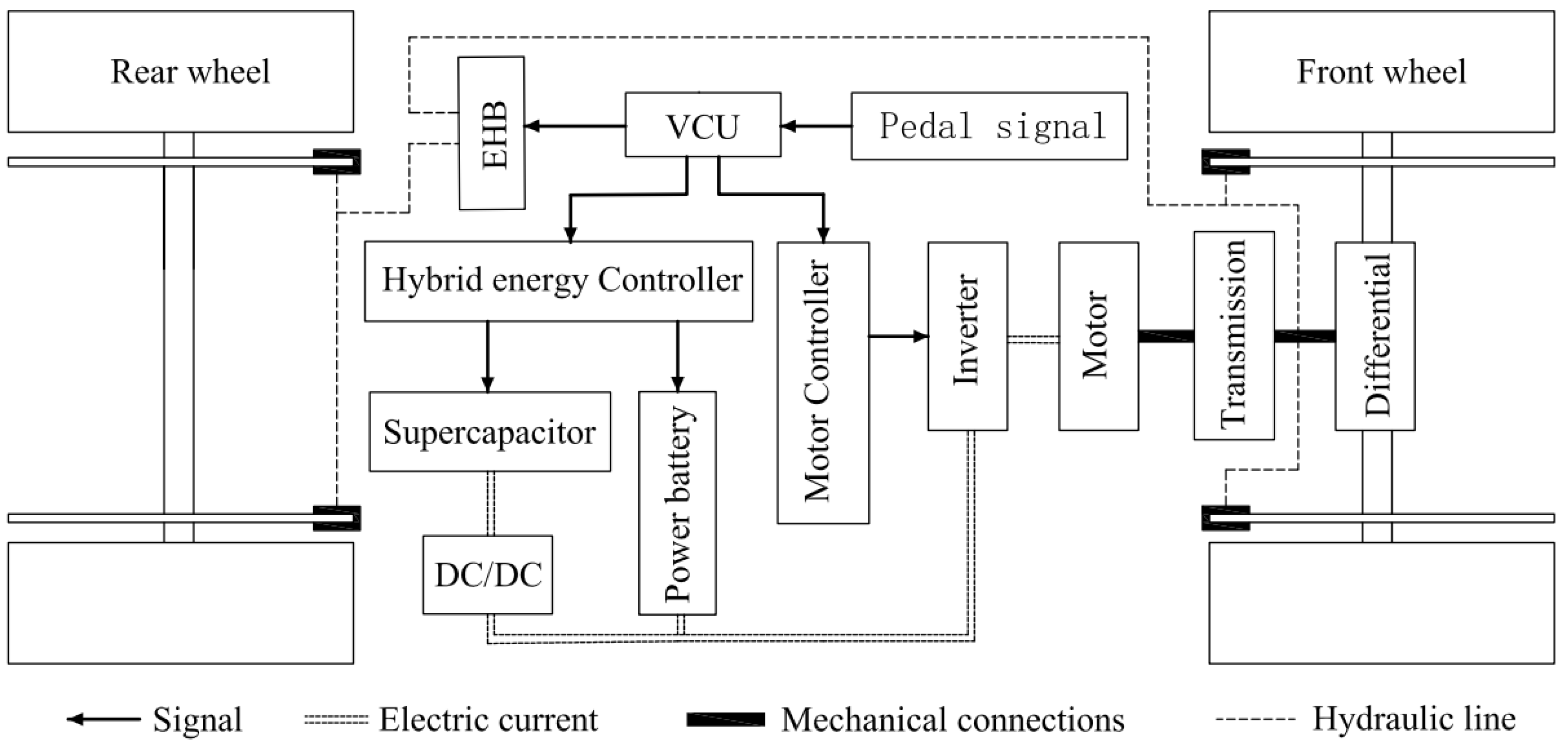
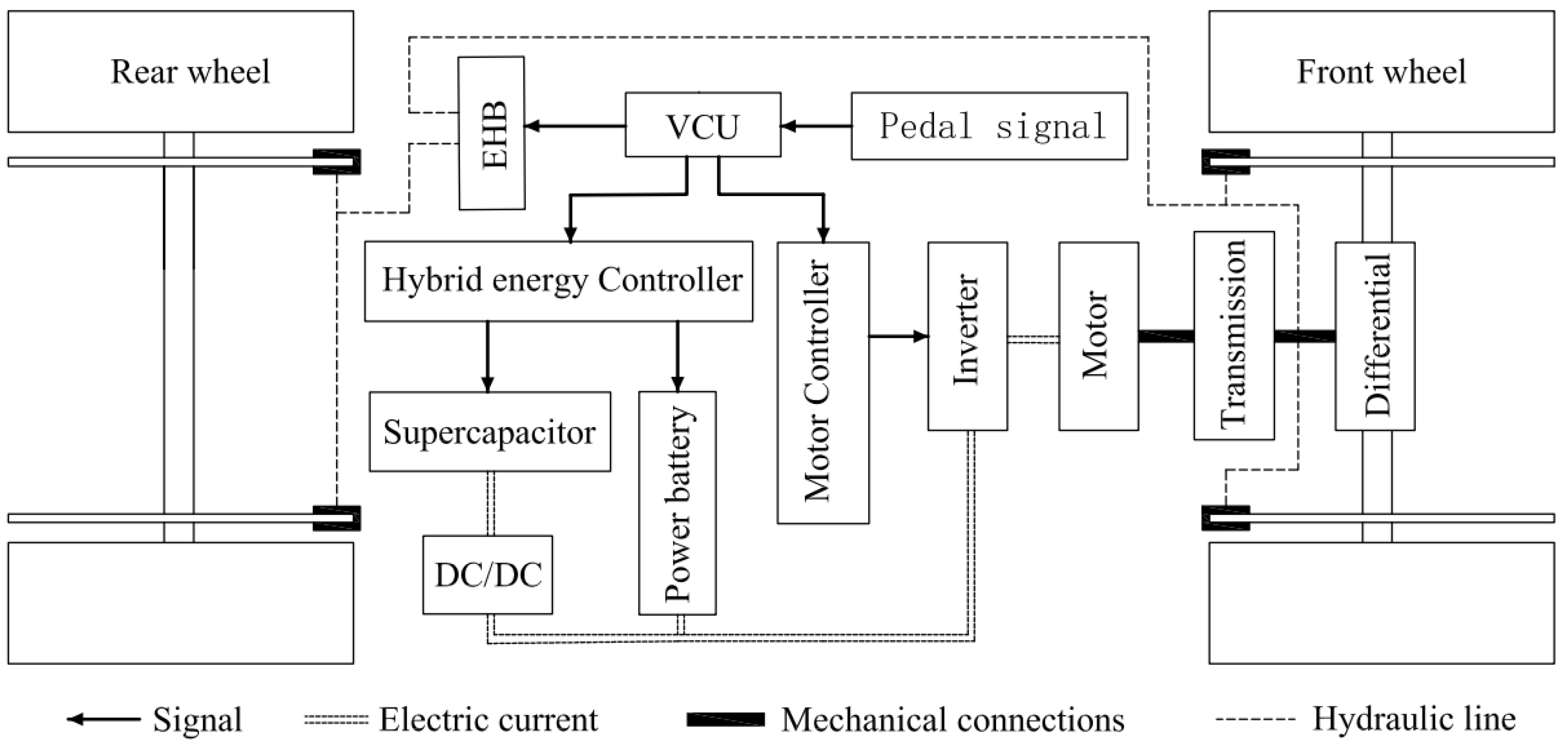
3.1. Working Principle of HERBS
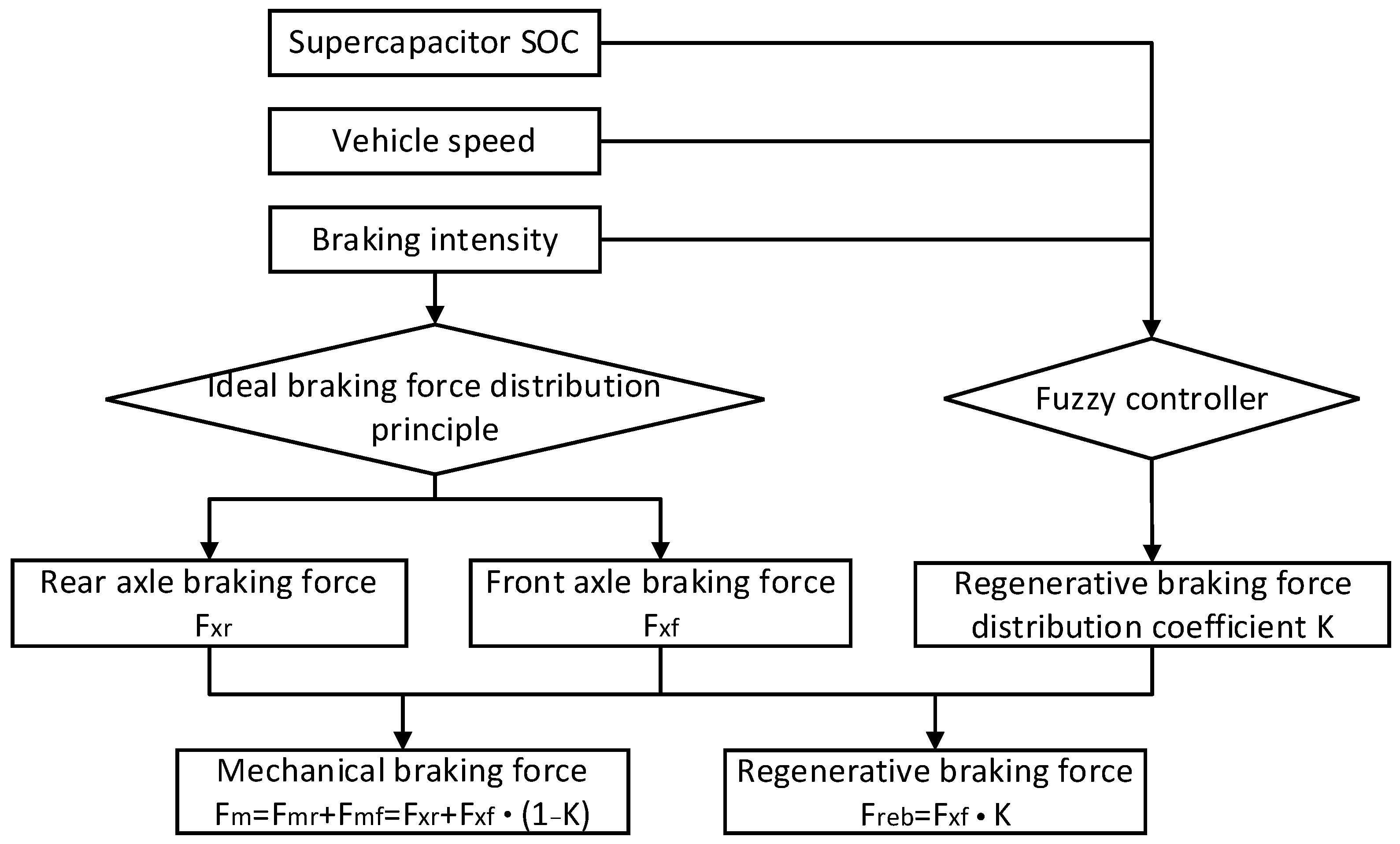
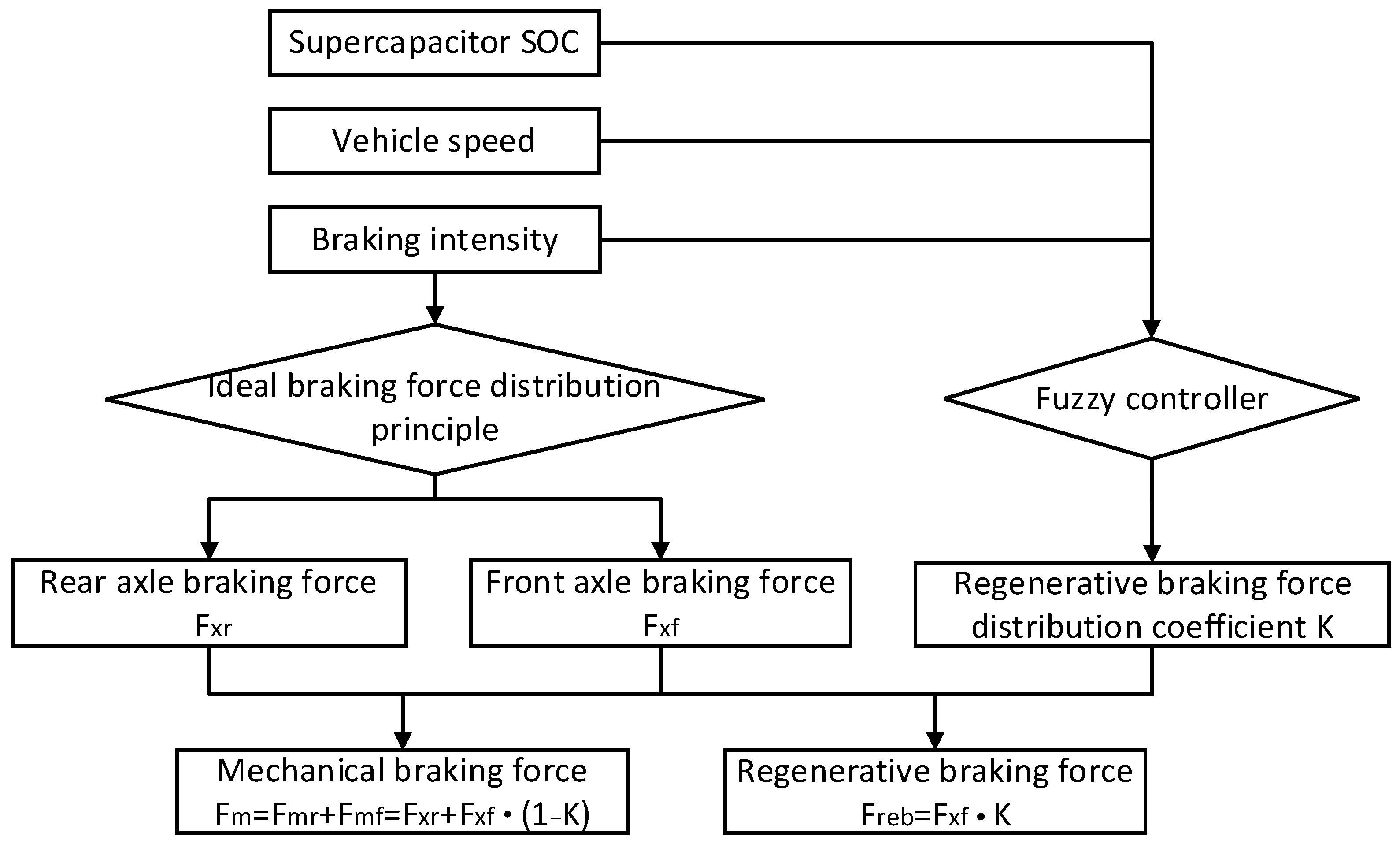
3.2. Distribution Strategy Design of Brake Force
- (1)
- When the vehicle speed is too high, less braking energy shall be recovered for braking safety; when the vehicle speed is too low, less braking energy is recovered.
- (2)
- When the supercapacitor SOC is high, the charging efficiency is low, and the braking energy is recovered as little as possible; when the supercapacitor SOC is low, the charging efficiency is high and the energy can be recovered as much as possible.
- (3)
- When the braking intensity is too high, energy is not recovered for braking safety; when the braking intensity is low, the recovery of braking energy shall be increased.
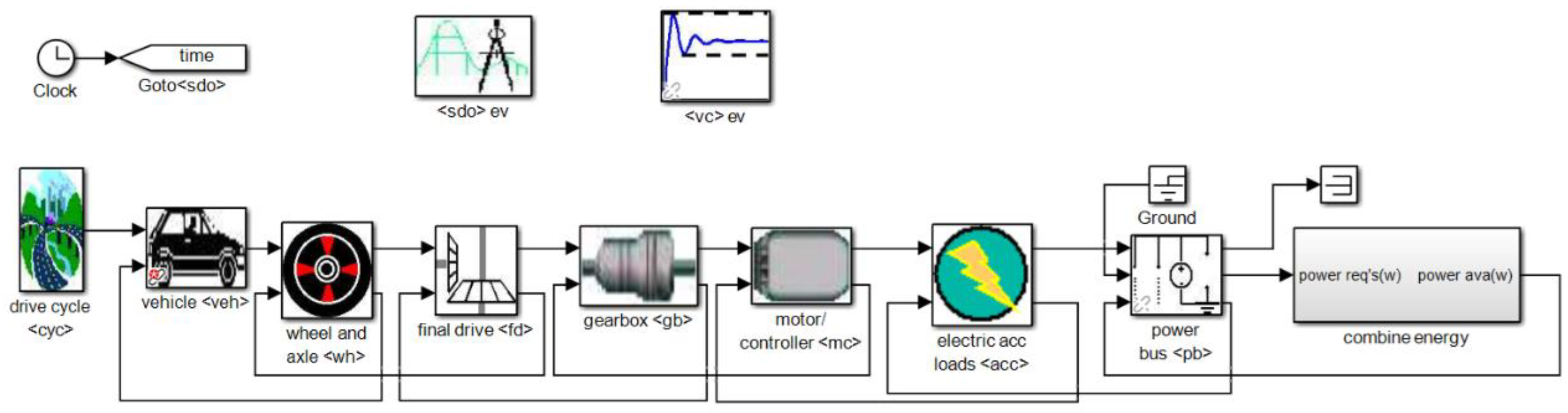
3.3. HERBS Vehicle Model
4. Analysis of the Traffic Characteristics of a Single Vehicle in the near Signal Control Area
- (1)
- Ignore the impact of pedestrians and non-motor vehicles on the study vehicles;
- (2)
- The main research object is a single signalized intersection, without considering the impact of other intersections;
- (3)
- It mainly studies the straight driving conditions of vehicles. The vehicle lane changing conditions are not taken into account, and the problem of traffic conflict is ignored;
- (4)
- Classify the yellow-light as the red-light, which means that forbidden for vehicles to cross the stop line when the yellow-light is on.
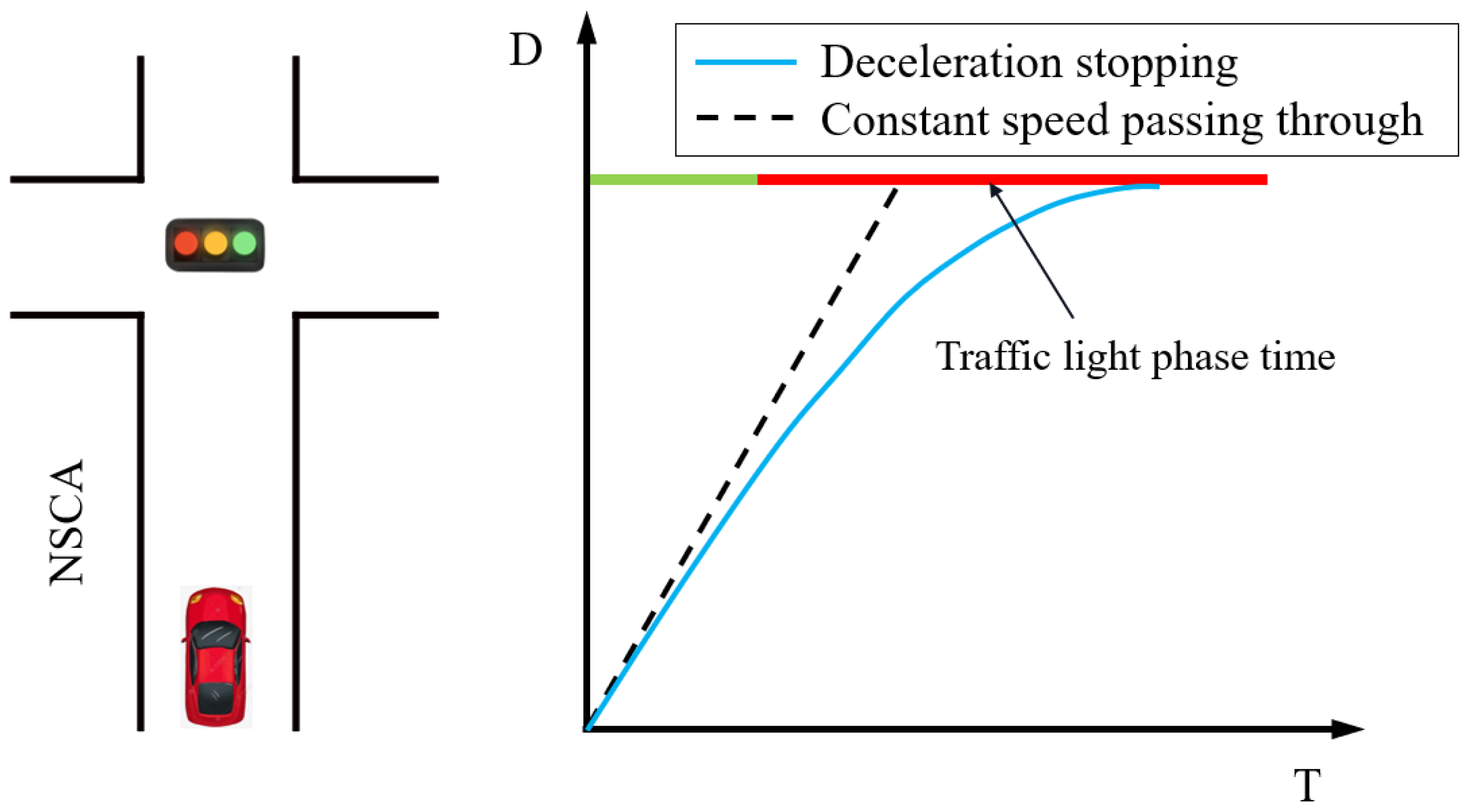
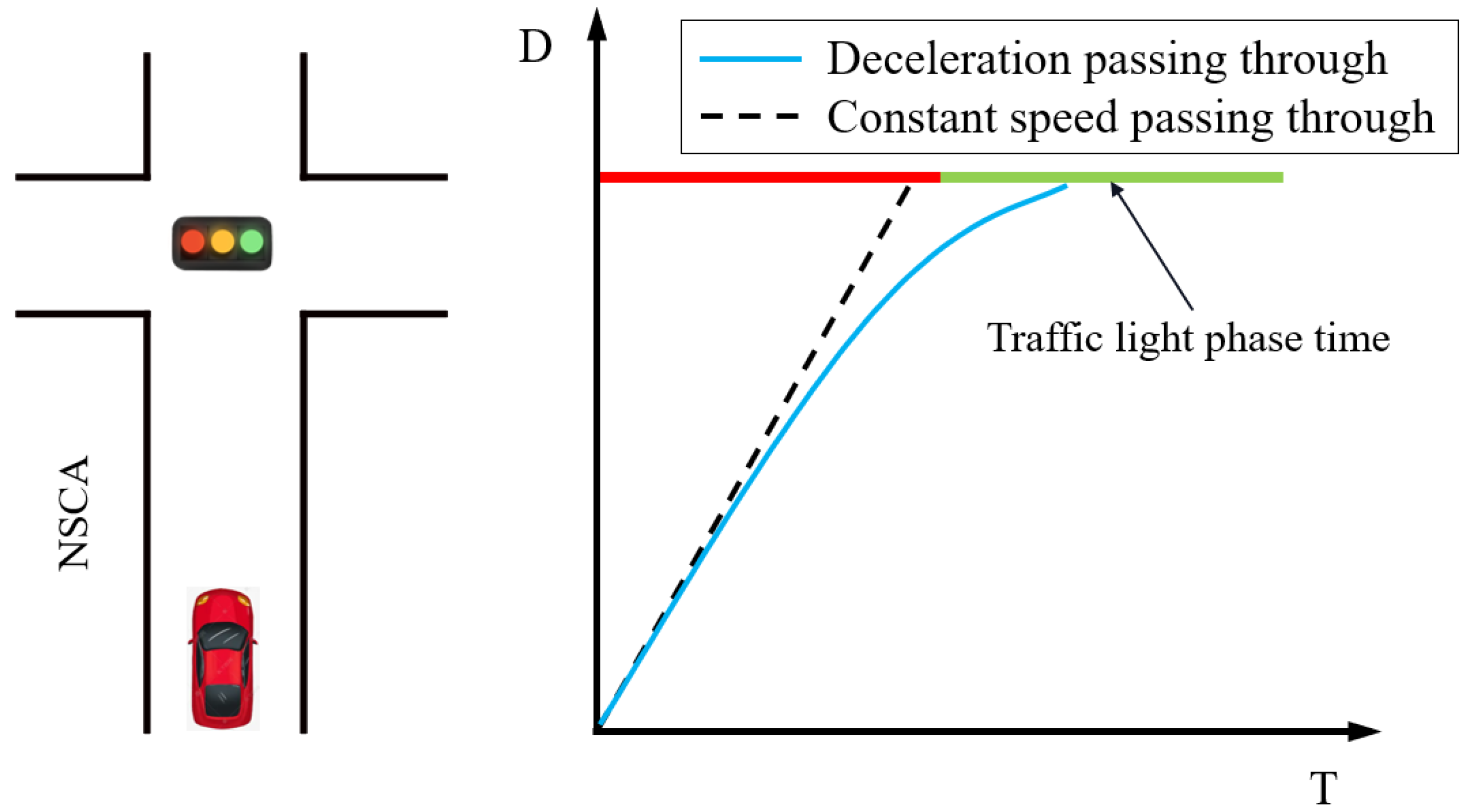
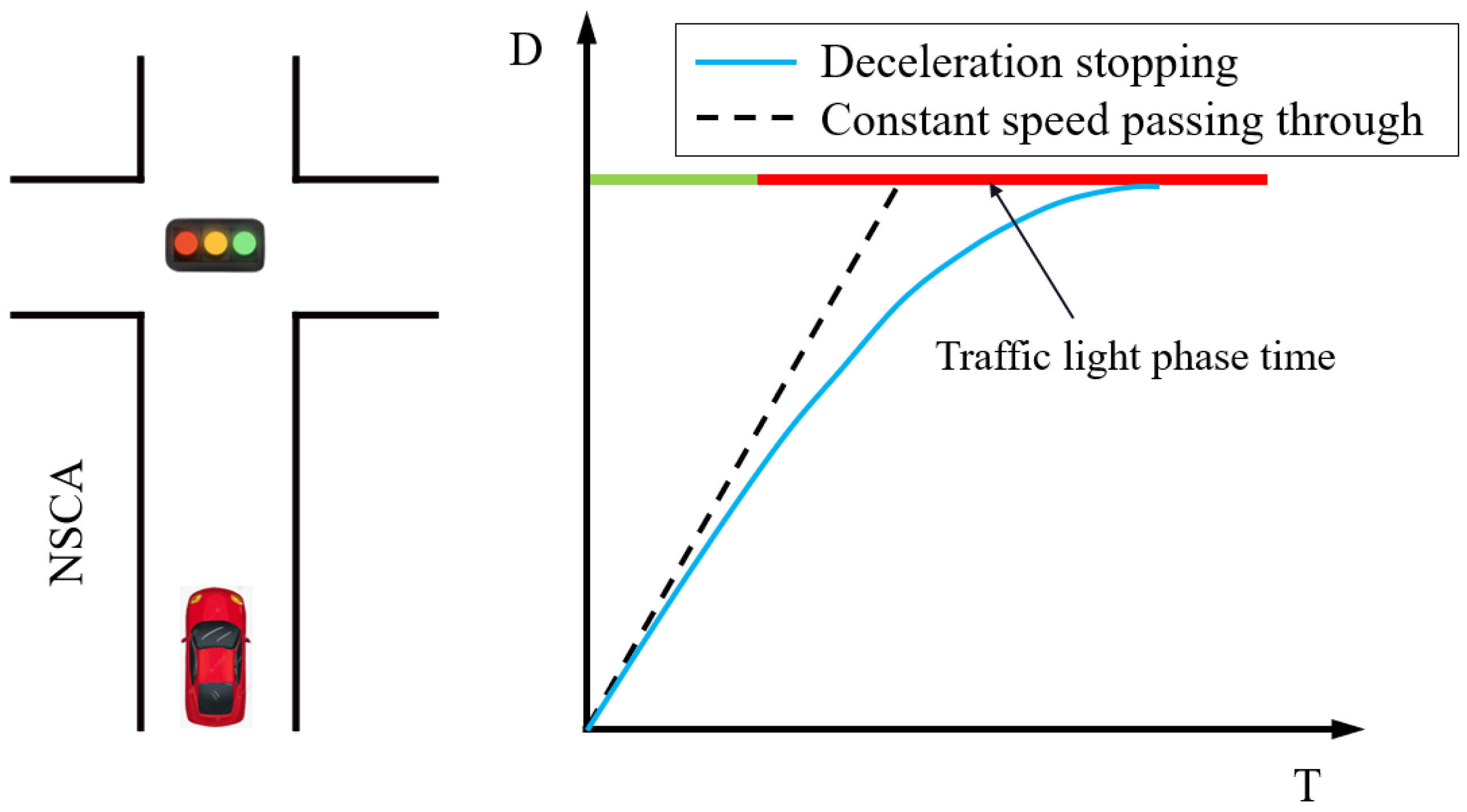
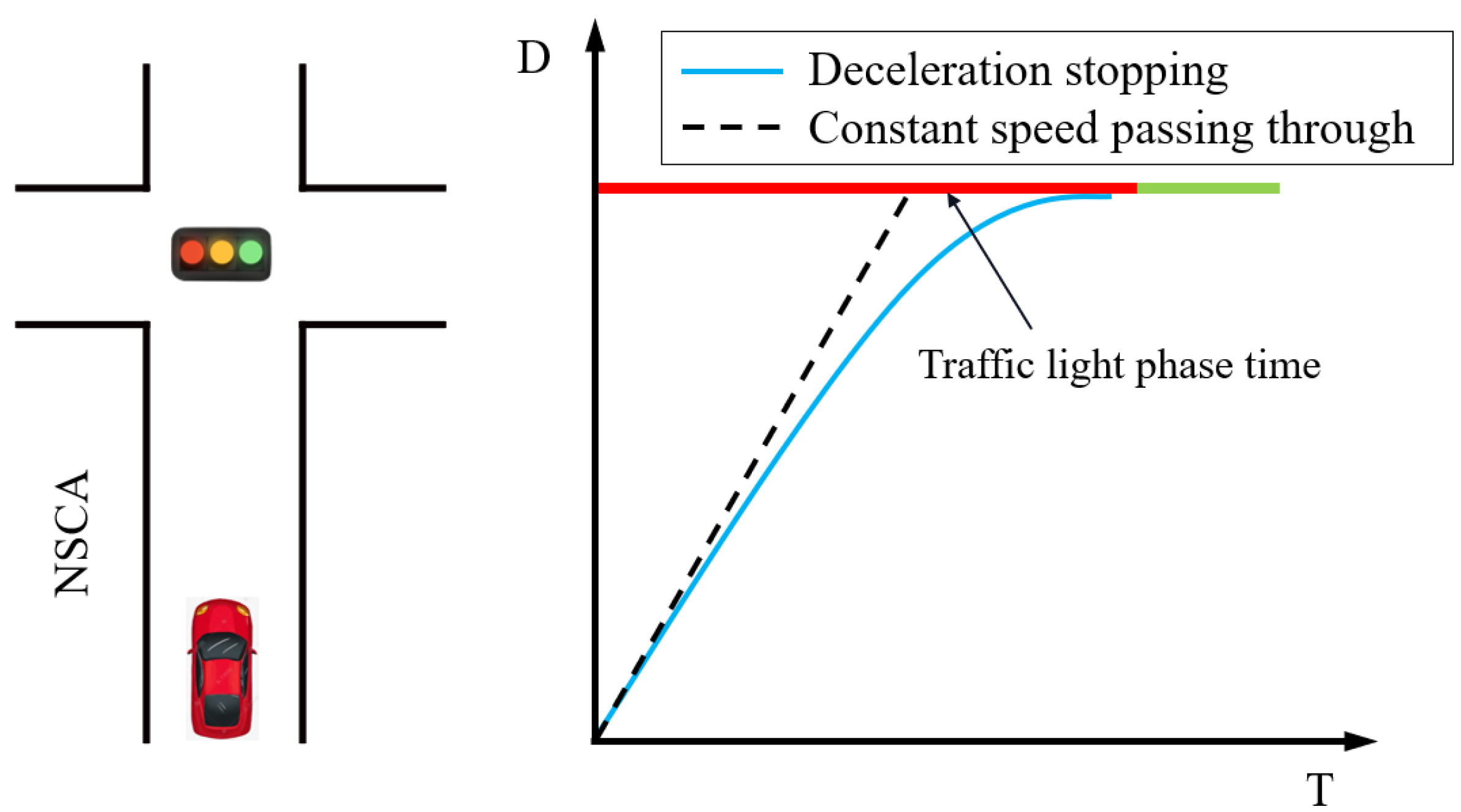
4.1. Deceleration Passing through Condition
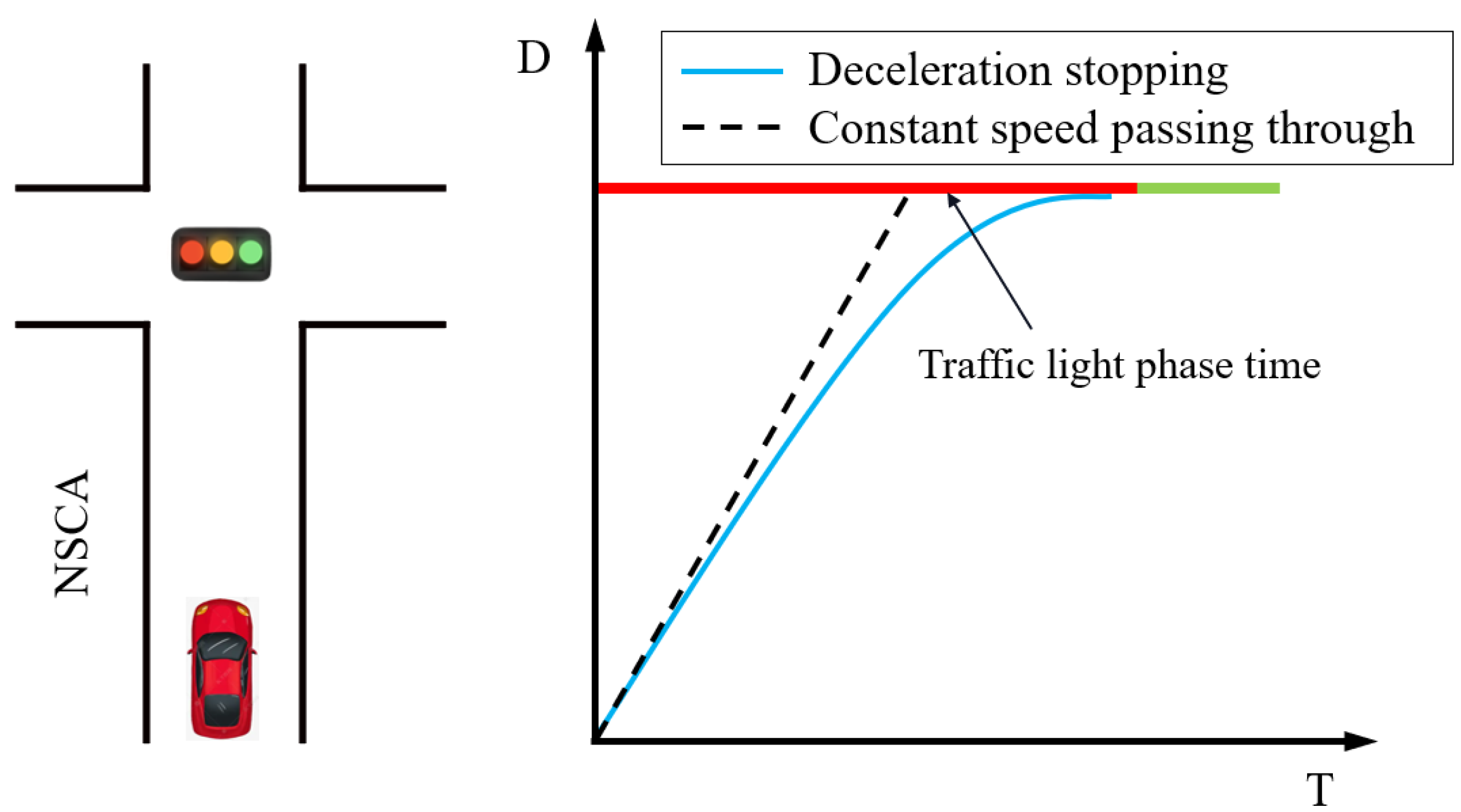
4.2. Deceleration Stopping Condition
5. Optimization of Speed Trajectory in NSCA Based on GA
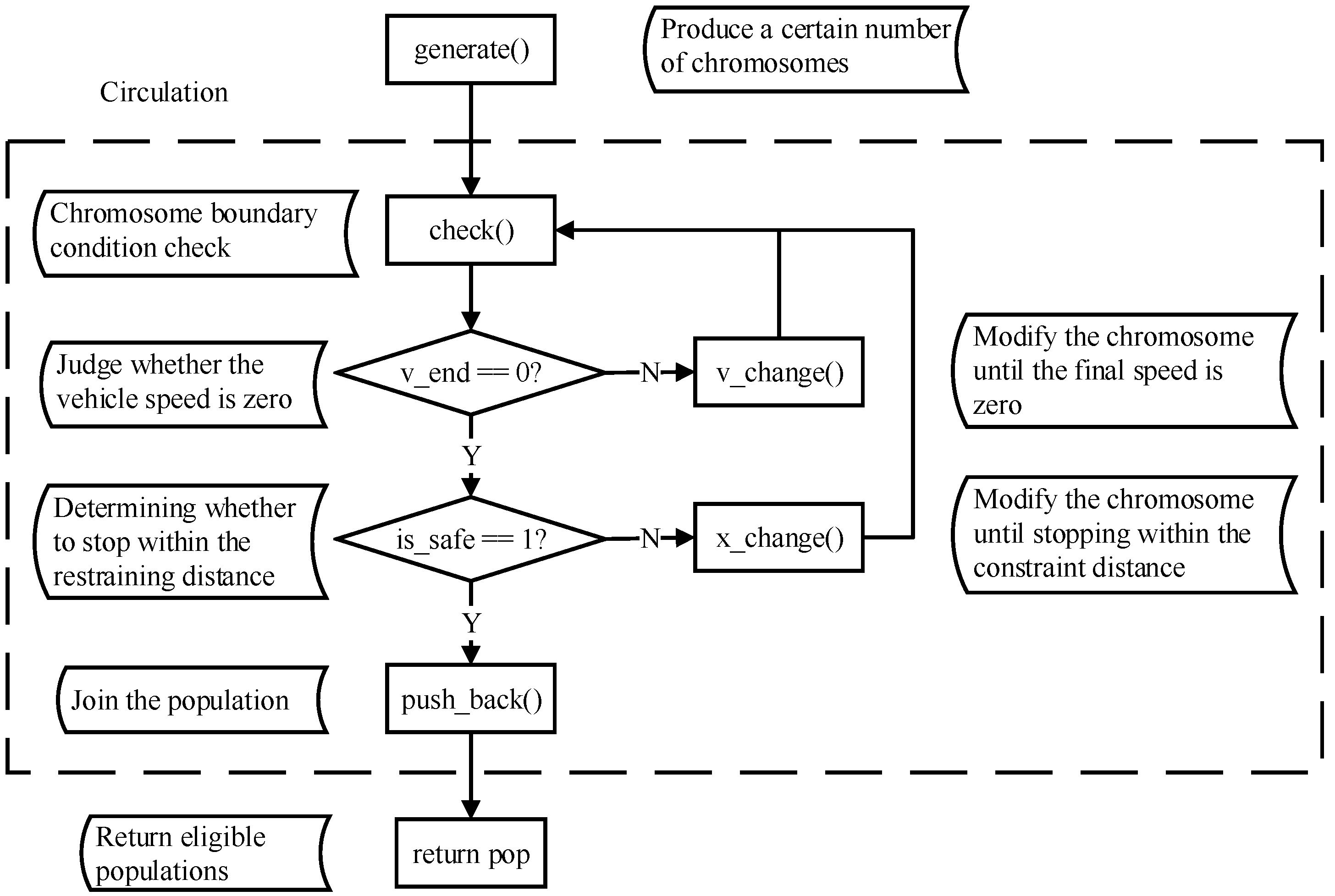
5.1. Establishment of GA Optimization Mathematical Model for Deceleration Stopping
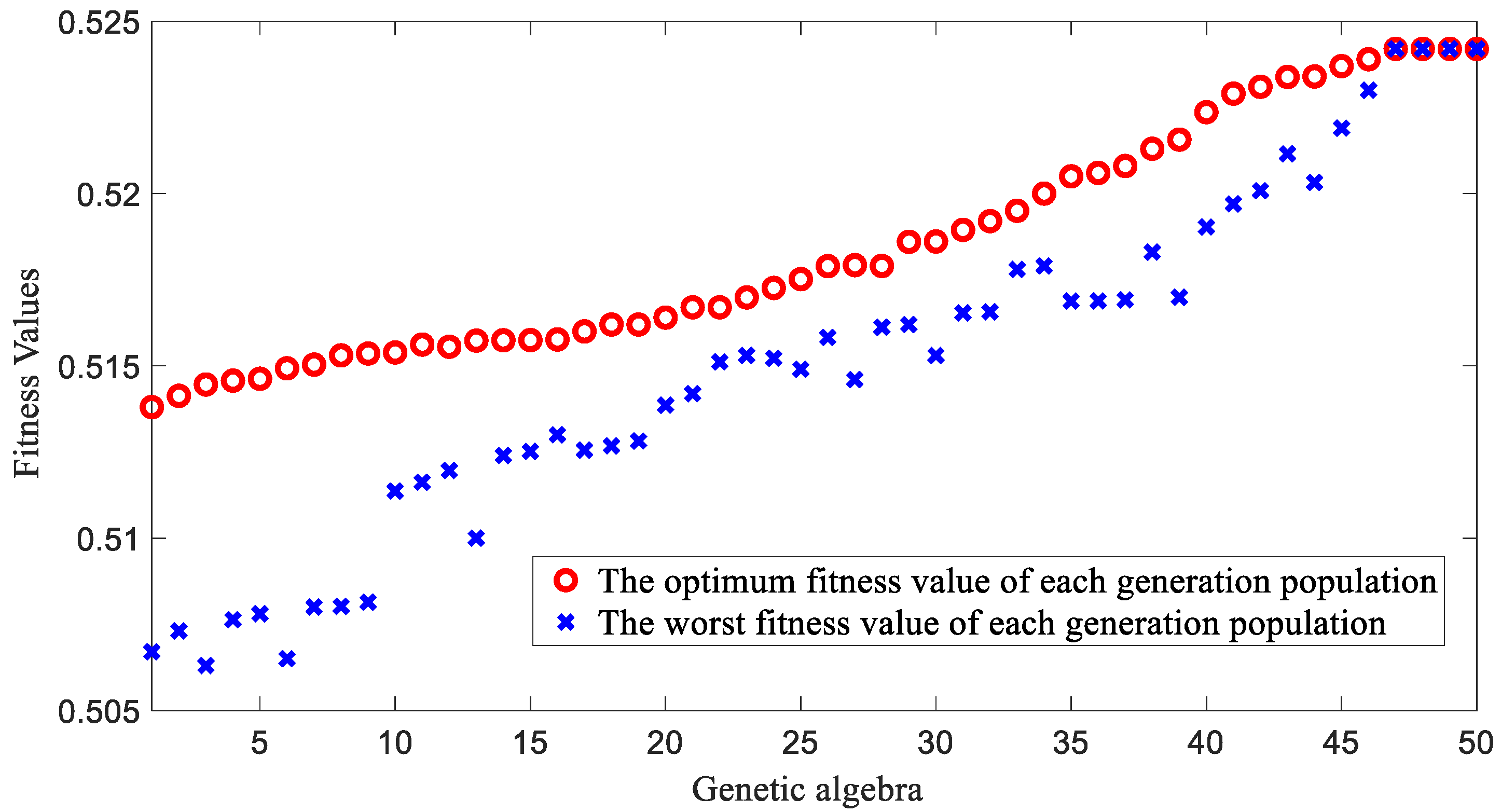
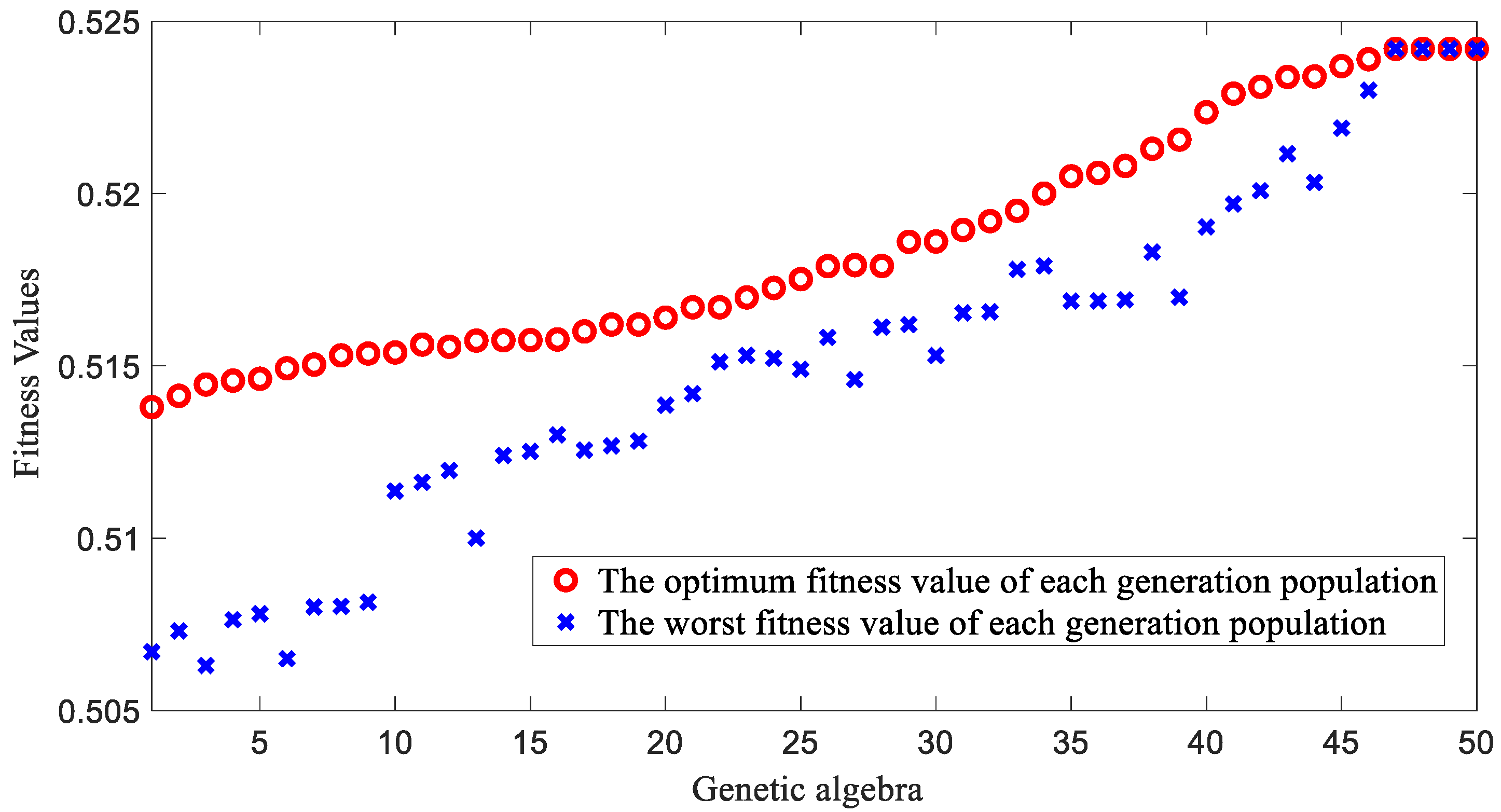
5.2. Deceleration Stopping GA Optimization
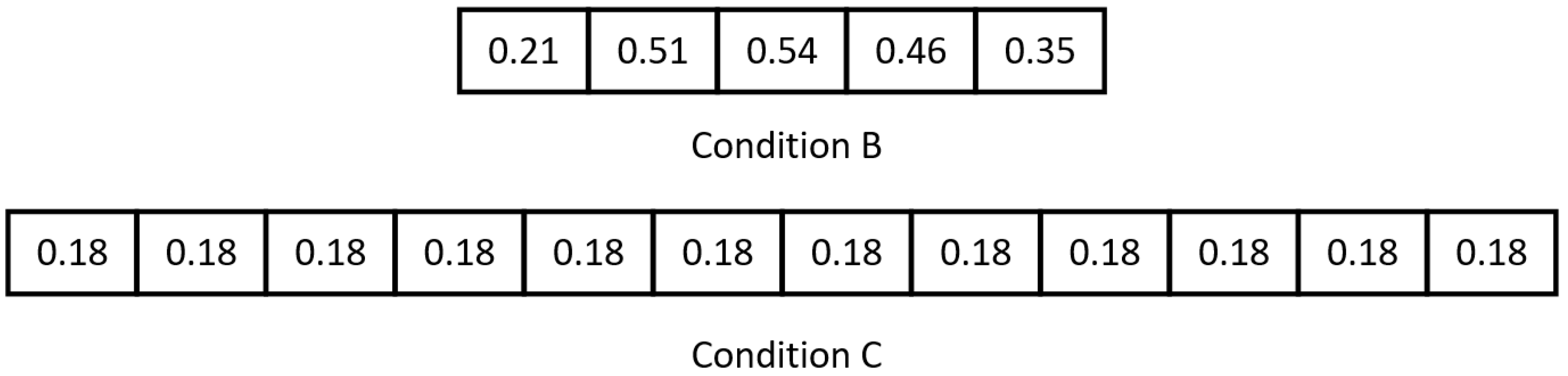
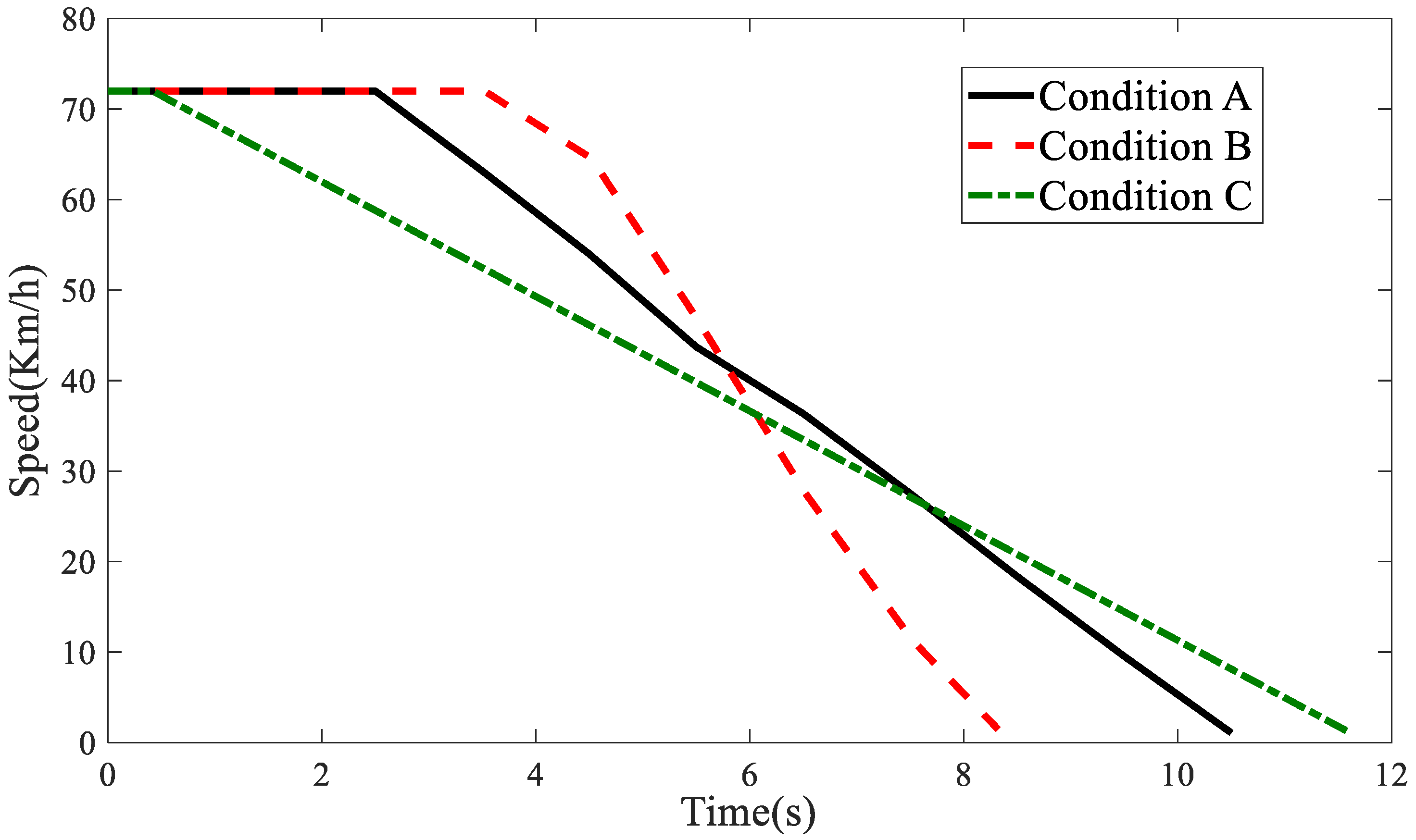
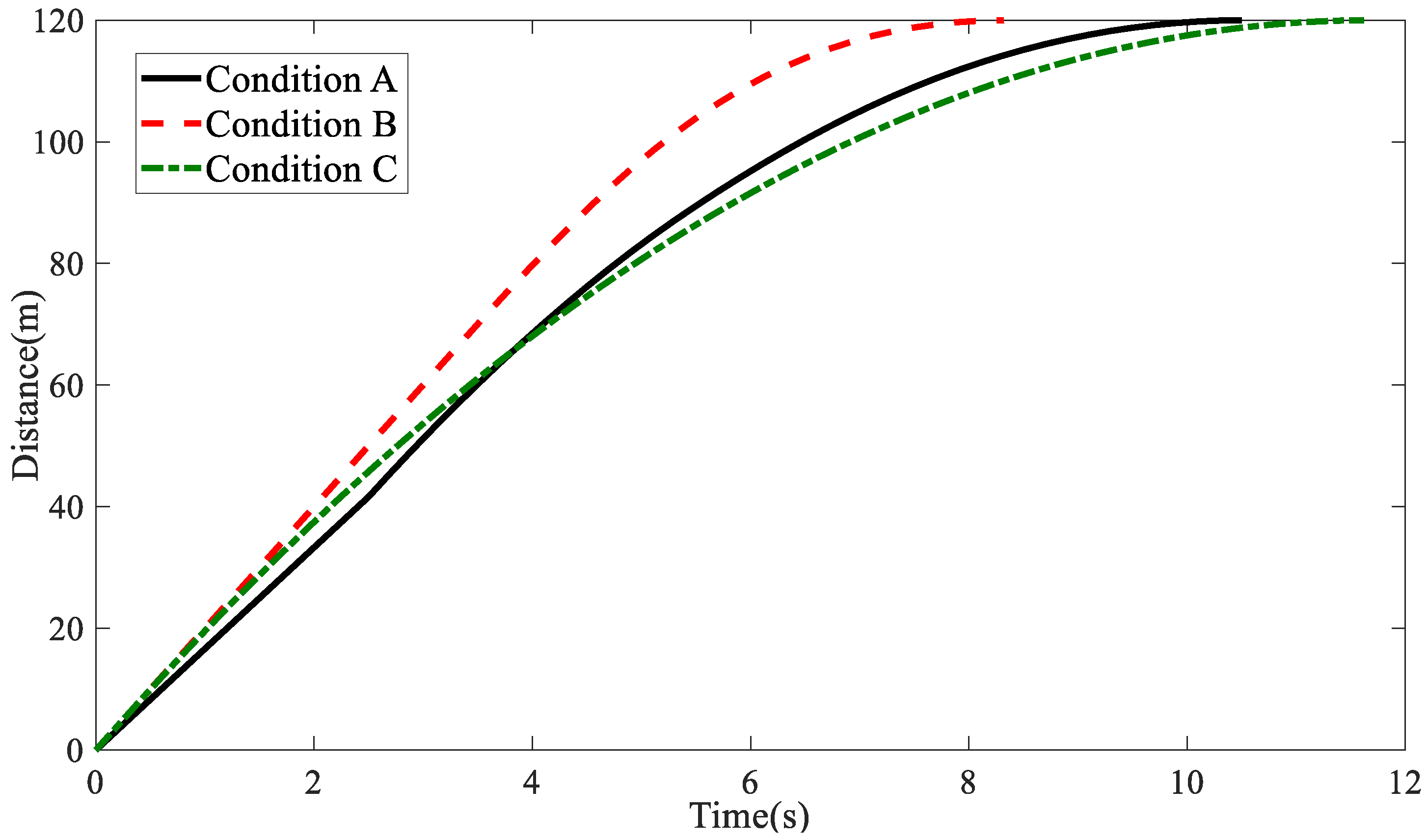
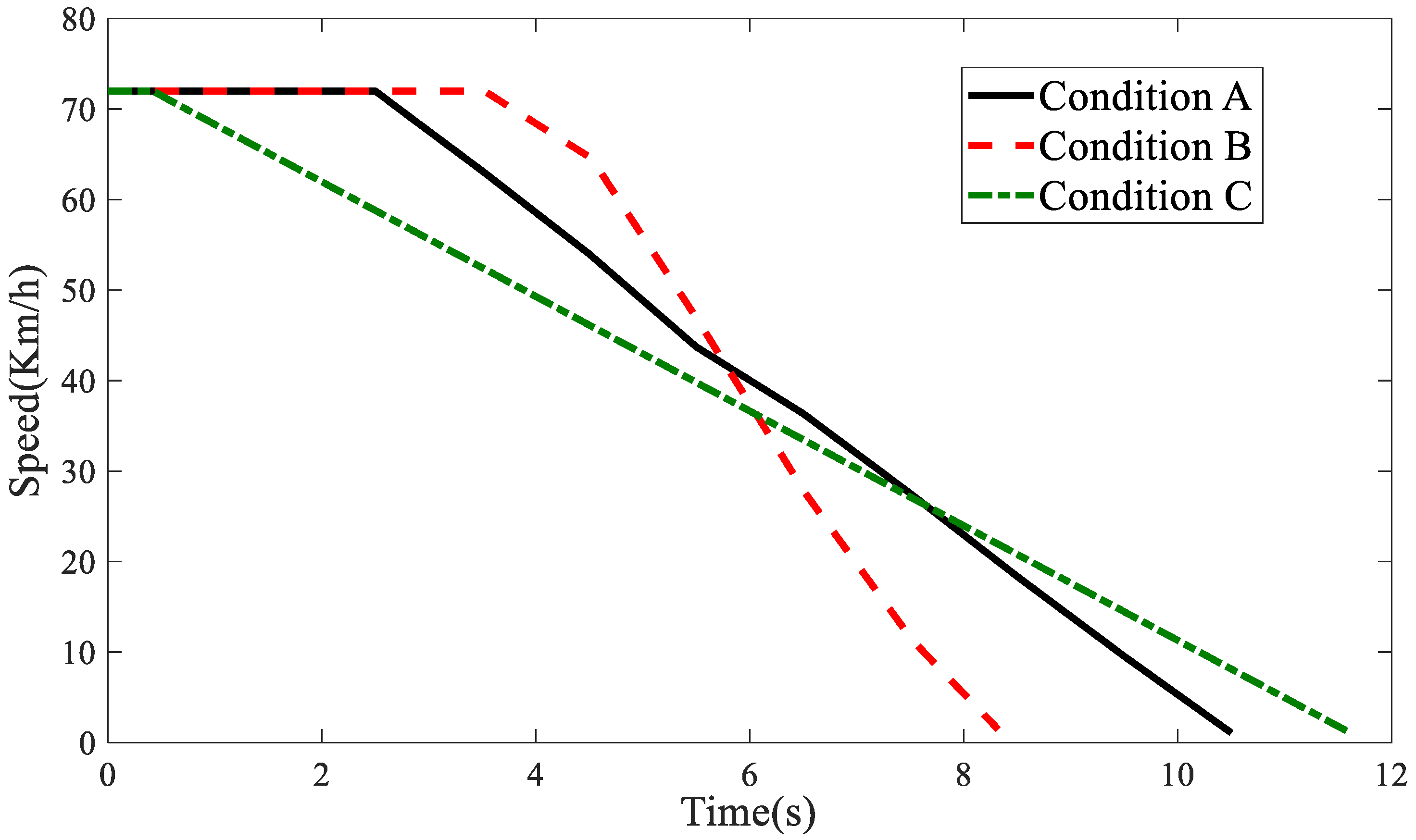
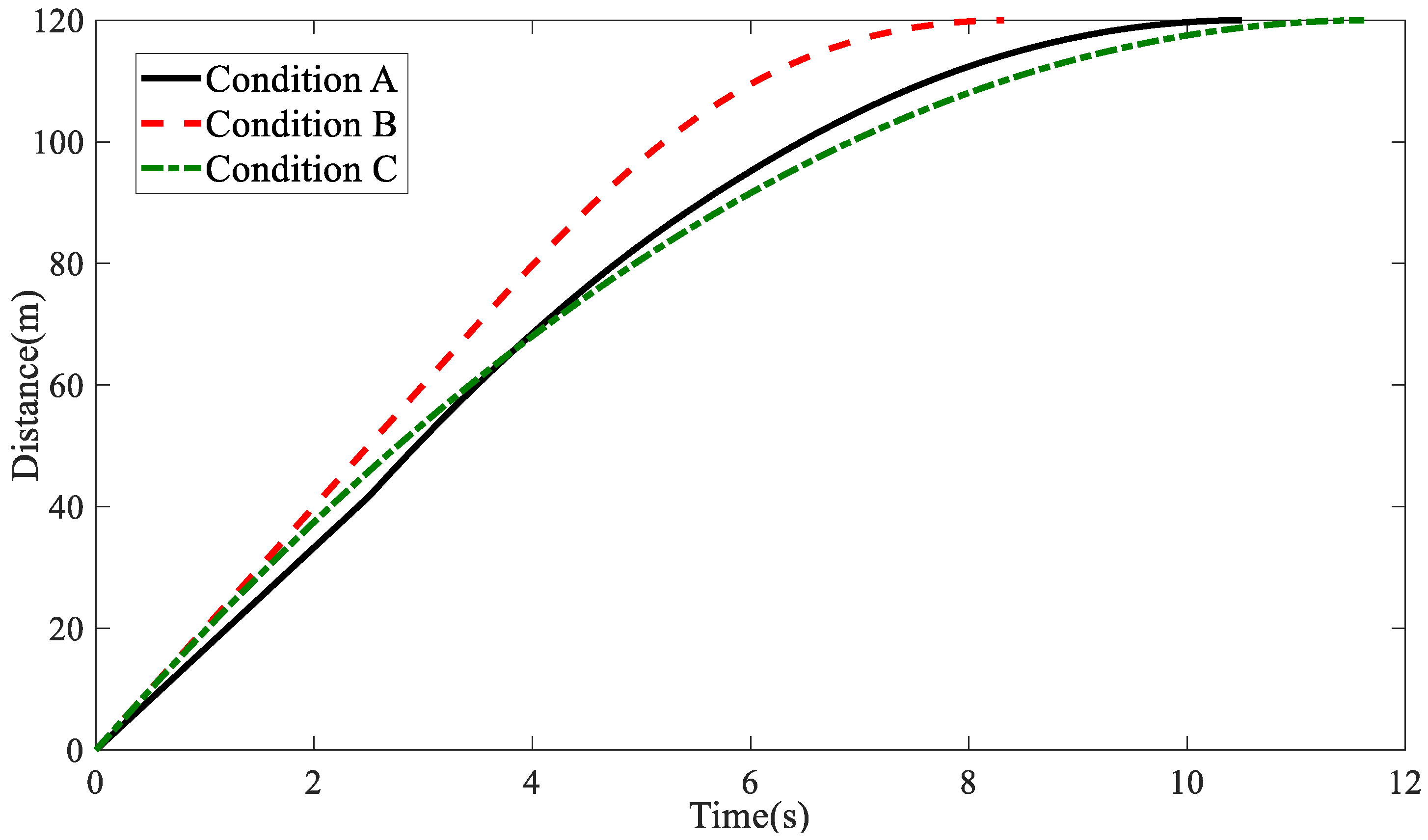
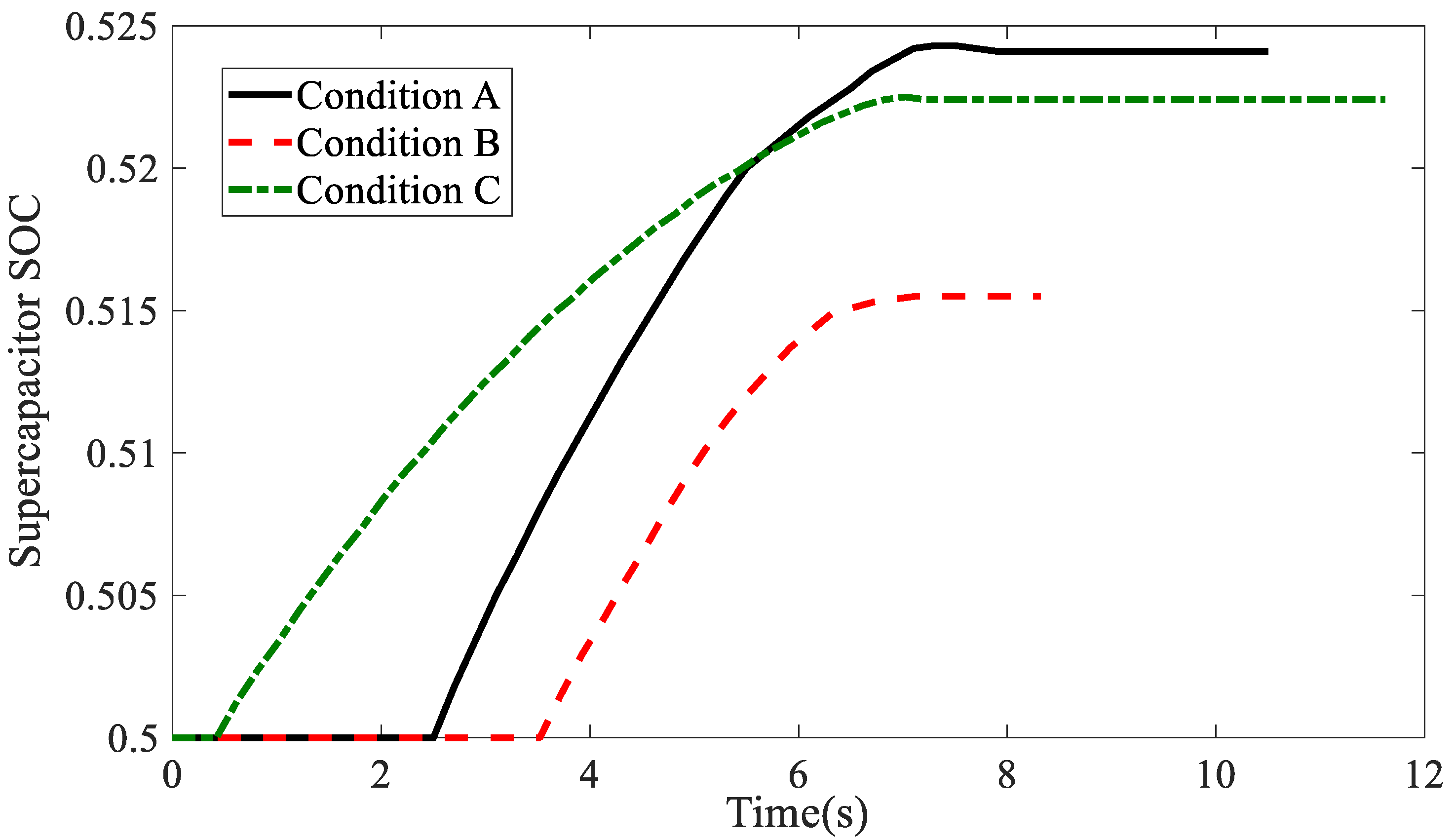
5.3. Comparative Analysis of Simulation Results
6. Conclusions
- (1)
- Based on the characteristics that connected automated vehicle can communicate with roadside facilities and regional center control systems in real-time, a GA optimization model for the deceleration stopping of electric vehicle HERBS is built. Taking the obtained signal light status and timing information as constraints, and the BERE as the optimization objective, speed trajectory of the autonomous vehicle equipped with the regenerative braking system is optimized at the signalized intersection and BERE and energy consumption are improved greatly.
- (2)
- The proposed speed trajectory planning method is also applicable for the situation of signalized intersection by deceleration passing through, for both passage efficiency and BERE are favorable, and for reducing the energy consumption.
- (3)
- Influence of other vehicles in the trip and their effects on the speed trajectory planning, based on the BERE under multi-vehicle environments, should be further investigated in future work.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kamalanathsharma, R.K.; Rakha, H.A.; Yang, H. Networkwide Impacts of Vehicle Ecospeed Control in the Vicinity of Traffic Signalized Intersections. Transp. Res. Rec. J. Transp. Res. Board 2015, 2503, 91–99. [Google Scholar] [CrossRef]
- Bartoletti, S.; Masini, B.M.; Martinez, V.; Sarris, I.; Bazzi, A. Impact of the Generation Interval on the Performance of Sidelink C-V2X Autonomous Mode. IEEE Access 2021, 9, 35121–35135. [Google Scholar] [CrossRef]
- Song, Z.; Song, K.; Zhang, T. State-of-the-Art and Development Trends of Energy Management Strategies for Intelligent and Connected New Energy Vehicles: A Review. SAE Tech. Pap. 2019. [Google Scholar] [CrossRef]
- Wang, Z.; Wu, G.; Barth, M. Cooperative Eco-Driving at Signalized Intersections in a Partially Connected and Automated Vehicle Environment. IEEE Trans. Intell. Transp. Syst. 2020, 21, 2029–2038. [Google Scholar] [CrossRef] [Green Version]
- Yang, H.; Rakha, H.; Ala, M.V. Eco-Cooperative Adaptive Cruise Control at Signalized Intersections Considering Queue Effects. IEEE Trans. Intell. Transp. Syst. 2016, 18, 1575–1585. [Google Scholar] [CrossRef]
- Cruz-Piris, L.; Lopez-Carmona, M.A.; Marsa-Maestre, I. Automated optimization of Intersections using a genetic algorithm. IEEE Access 2019, 7, 15452–15468. [Google Scholar] [CrossRef]
- Jinquan, G.; Hongwen, H.; Jianwei, L.; Qingwu, L. Real-time energy management of fuel cell hybrid electric buses: Fuel cell engines friendly intersection speed planning. Energy 2021, 226, 120440. [Google Scholar] [CrossRef]
- Dong, H.; Zhuang, W.; Chen, B.; Lu, Y.; Liu, S.; Xu, L.; Pi, D.; Yin, G. Predictive energy-efficient driving strategy design of connected electric vehicle among multiple signalized intersections. Transp. Res. Part C 2022, 137, 103595. [Google Scholar] [CrossRef]
- Wei, X.; Leng, J.; Sun, C.; Huo, W.; Ren, Q.; Sun, F. Co-optimization method of speed planning and energy management for fuel cell vehicles through signalized intersections. J. Power Sources 2022, 518, 230598. [Google Scholar] [CrossRef]
- Liu, X.G.; Wang, H.N.; Wang, J.W.; Hao, L. Speed Control Strategy and Optimization of Signalized Intersection in Network Environment. J. Transp. Syst. Eng. Inf. Technol. 2021, 21, 82–90. [Google Scholar]
- Cheng, Y.; Zhao, J.Y.; Wang, L. Conflict Resolution Model Based on Multi-vehicle Cooperative Optimization at Intersections. J. Transp. Syst. Eng. Inf. Technol. 2020, 20, 205–211. [Google Scholar]
- Zhang, B.; Guo, G.; Wang, L.Y.; Wang, Q. Vehicle speed planning and control for fuel consumption optimization with traffic light state. Acta Autom. Sin. 2018, 44, 461–470. [Google Scholar]
- Sun, C.X.; Mo, B. Design of Control System of Brushless DC Motor Based on DSP. In Proceedings of the 2010 Intelligent Computation Technology and Automation (ICICTA), Changsha, China, 11–12 May 2010; pp. 11–14. [Google Scholar]
- Yue, X.L.; Bai, P. Modeling and simulation of brushless DC motor control algorithm based on matlab. Syst. Simul. Technol. 2019, 15, 120–125. [Google Scholar]
- Ji, Z.C.; Shen, X.Y.; Jiang, J.G. A novel method for modeling and simulation of BLDC system based on matlab. J. Syst. Simul. 2003, 15, 1745–1749. [Google Scholar]
- Li, H. Study on Control Strategy of Electric driving and Regeneration Braking for Pure Electric Vehicles. Ph.D. Thesis, Dalian University of Technology, Dalian, China, 2018. [Google Scholar]
- Meng, Y.J.; Li, X.N. Research on modeling and control strategy of bidirectional DC/DC converter for compound energy source. Mod. Electron. Tech. 2016, 39, 108–110. [Google Scholar]
- Li, N.; Ning, X.B.; Wang, Q.C.; Li, J.L. Hydraulic regenerative braking system studies based on a nonlinear dynamic model of a full vehicle. J. Mech. Sci. Technol. 2017, 31, 2691–2699. [Google Scholar] [CrossRef]
- Yu, F.; Lin, Y. Vehicle System Dynamics; China Machine Press: Beijing, China, 2008. [Google Scholar]
- Yu, Z.S. Automobile Theory; China Machine Press: Beijing, China, 2002. [Google Scholar]
- Lei, Z.Y.; Gao, J.P.; Qu, J.K.; Xi, J.G. Economic speed planning with consideration the state of traffic lights. Sci. Technol. Eng. 2020, 20, 7484–7492. [Google Scholar]
- Lei, Y.J.; Zhang, W.S. MATLAB Genetic Algorithm Toolbox and Its Application; Xidian University Press: Xi’an, China, 2014; pp. 150–240. [Google Scholar]
- Sun, B.; Jiang, P.; Zhou, G.R. AGV optimal path planning based on improved genetic algorithm. Comput. Eng. Des. 2020, 41, 550–556. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Parameter | Quantity |
|---|---|---|
| Mass | kg | 1800 |
| Wheel base | m | 2.85 |
| Front wheel track | m | 1.57 |
| Rear wheel track | m | 1.56 |
| Center of gravity | m | 0.53 |
| Distance from center of mass to front axle | m | 1.254 |
| Distance from center of mass to rear axle | m | 1.596 |
| Air drag coefficient | / | 0.28 |
| Wheel rolling radius | m | 0.32 |
| Symbol | Numerical | Unit |
|---|---|---|
| 1 | s | |
| 120 | m | |
| 20 | s | |
| 20 | m/s |
| Conditions | Supercapacitor SOC Initial Value | Supercapacitor SOC Final Value | Change Amount | Difference with Condition A |
|---|---|---|---|---|
| Condition A | 0.5 | 0.5243 | 0.0243 | -- |
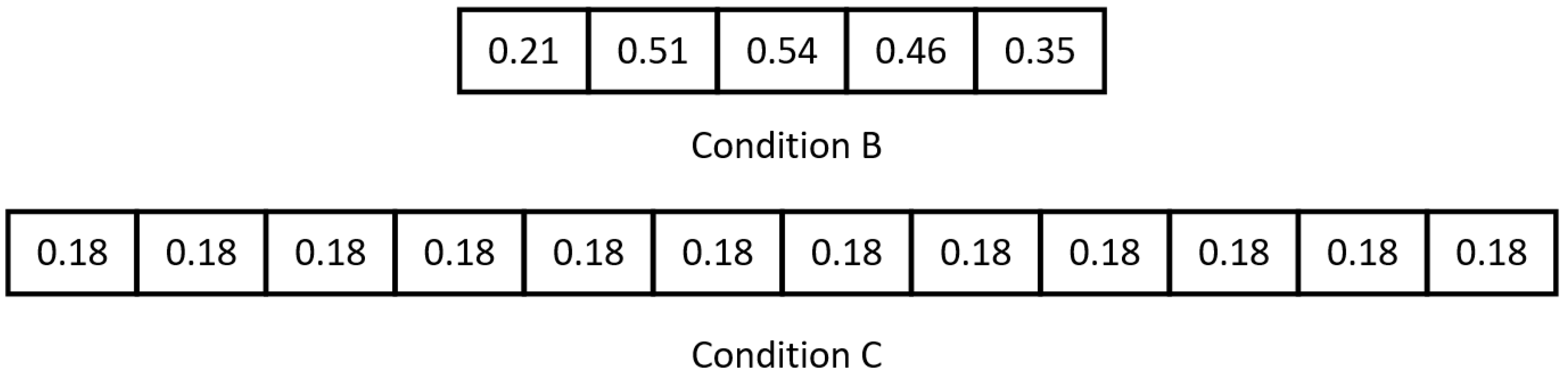
| Condition B | 0.5 | 0.5155 | 0.0155 | −36.21% |
| Condition C | 0.5 | 0.5224 | 0.0224 | −7.82% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, N.; Yang, J.; Jiang, J.; Hong, F.; Liu, Y.; Ning, X. Study on Speed Planning of Signalized Intersections with Autonomous Vehicles Considering Regenerative Braking. Processes 2022, 10, 1414. https://doi.org/10.3390/pr10071414
Li N, Yang J, Jiang J, Hong F, Liu Y, Ning X. Study on Speed Planning of Signalized Intersections with Autonomous Vehicles Considering Regenerative Braking. Processes. 2022; 10(7):1414. https://doi.org/10.3390/pr10071414
Chicago/Turabian StyleLi, Ning, Jiarao Yang, Junping Jiang, Feng Hong, Yang Liu, and Xiaobin Ning. 2022. "Study on Speed Planning of Signalized Intersections with Autonomous Vehicles Considering Regenerative Braking" Processes 10, no. 7: 1414. https://doi.org/10.3390/pr10071414