Task Engagement as Personalization Feedback for Socially-Assistive Robots and Cognitive Training


Abstract
:1. Introduction
2. Background and Related Work
2.1. Reinforcement Learning for Socially-Assistive Robotics
2.2. Brain-Computer Interfaces
2.3. Learning from Human Feedback
3. Personalized Robot-Assisted Cognitive Training
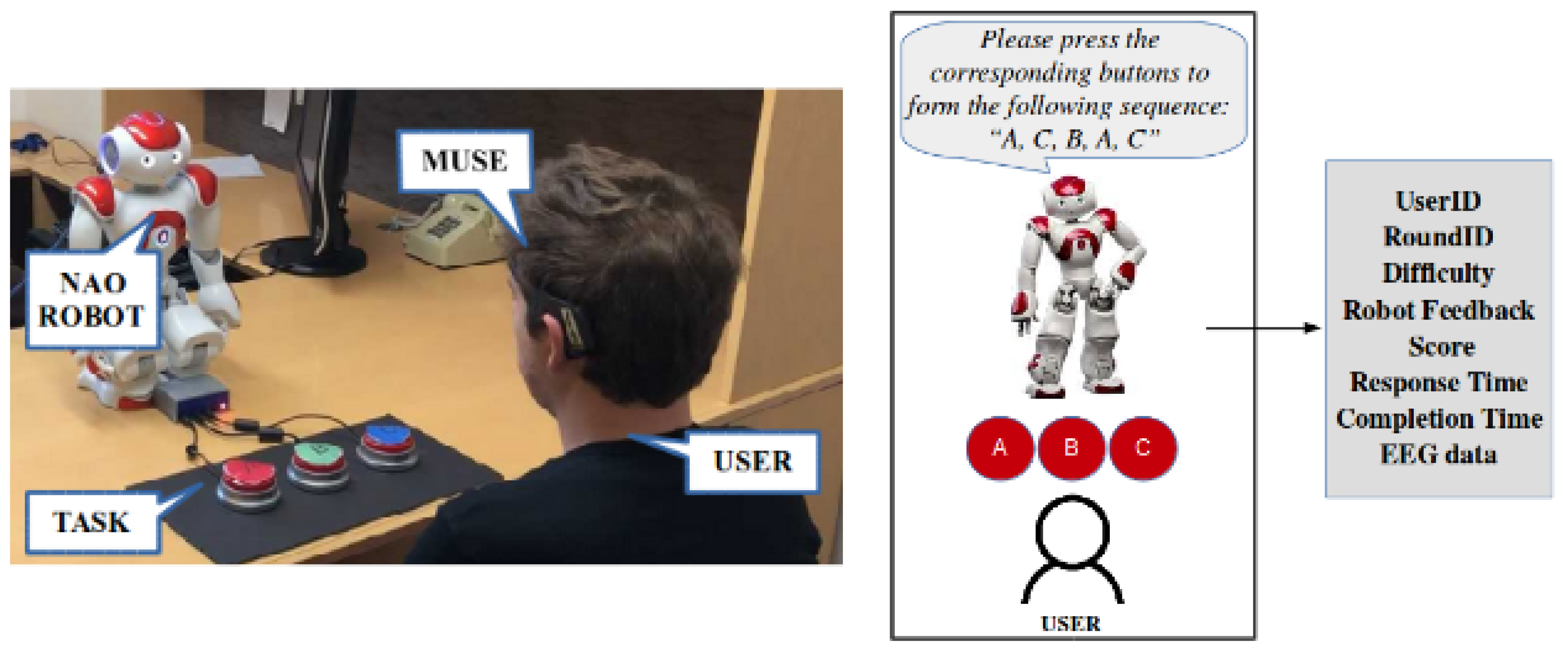
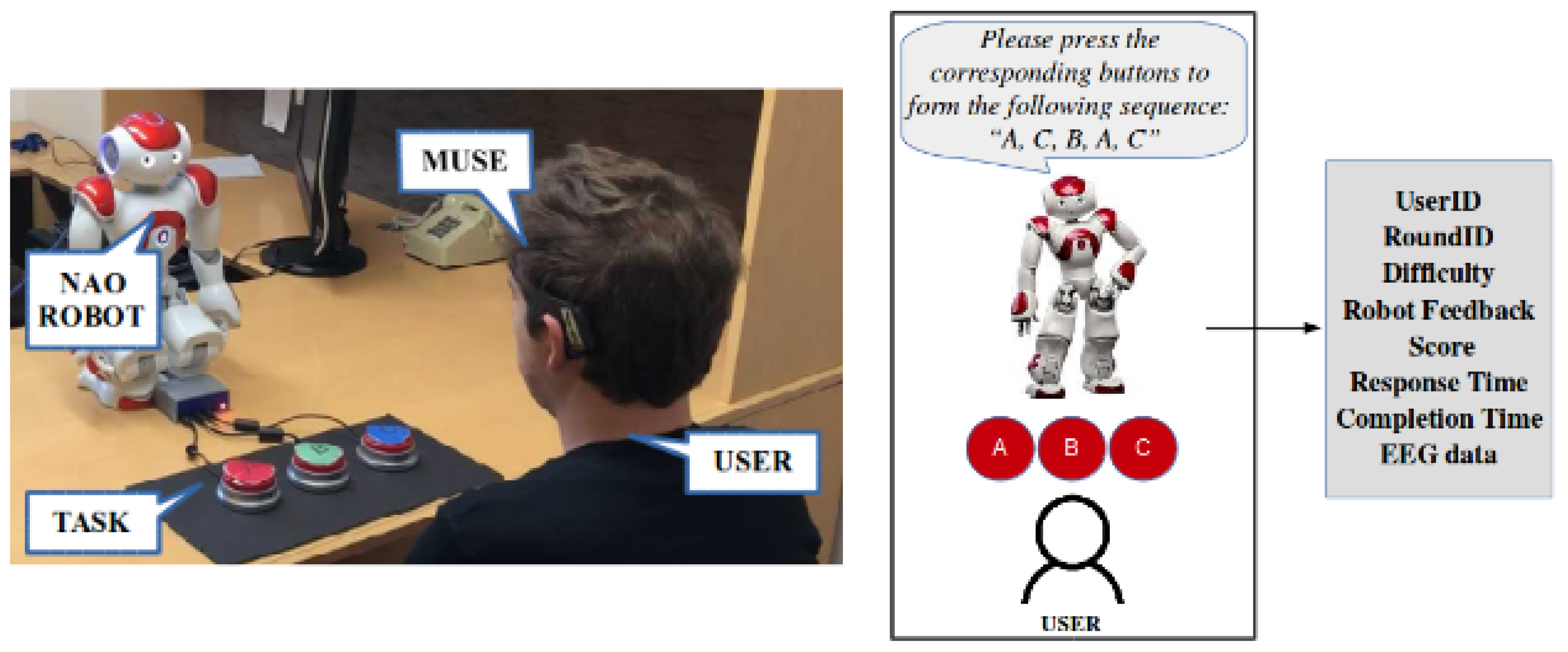
3.1. The Sequence Learning Task
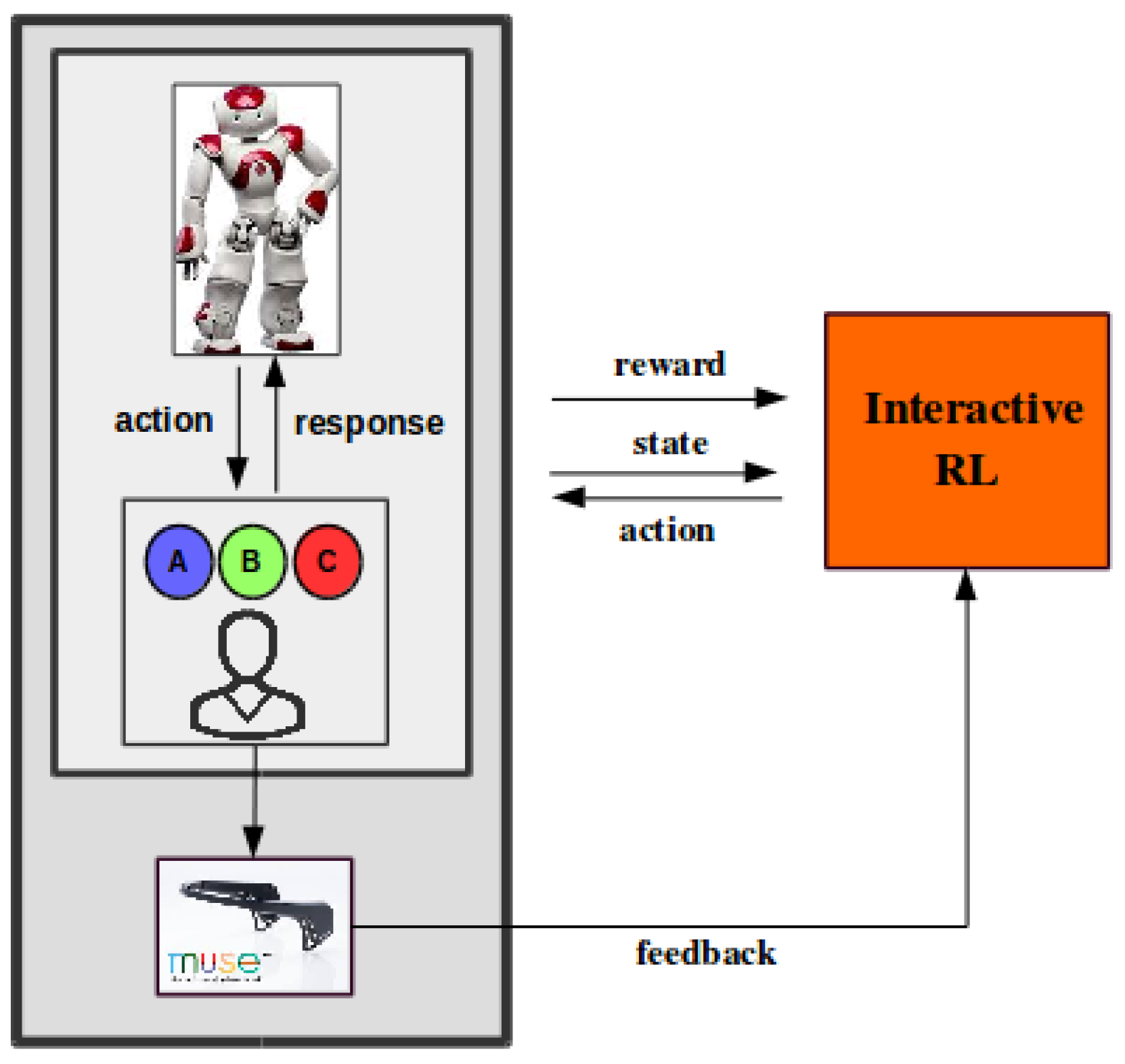
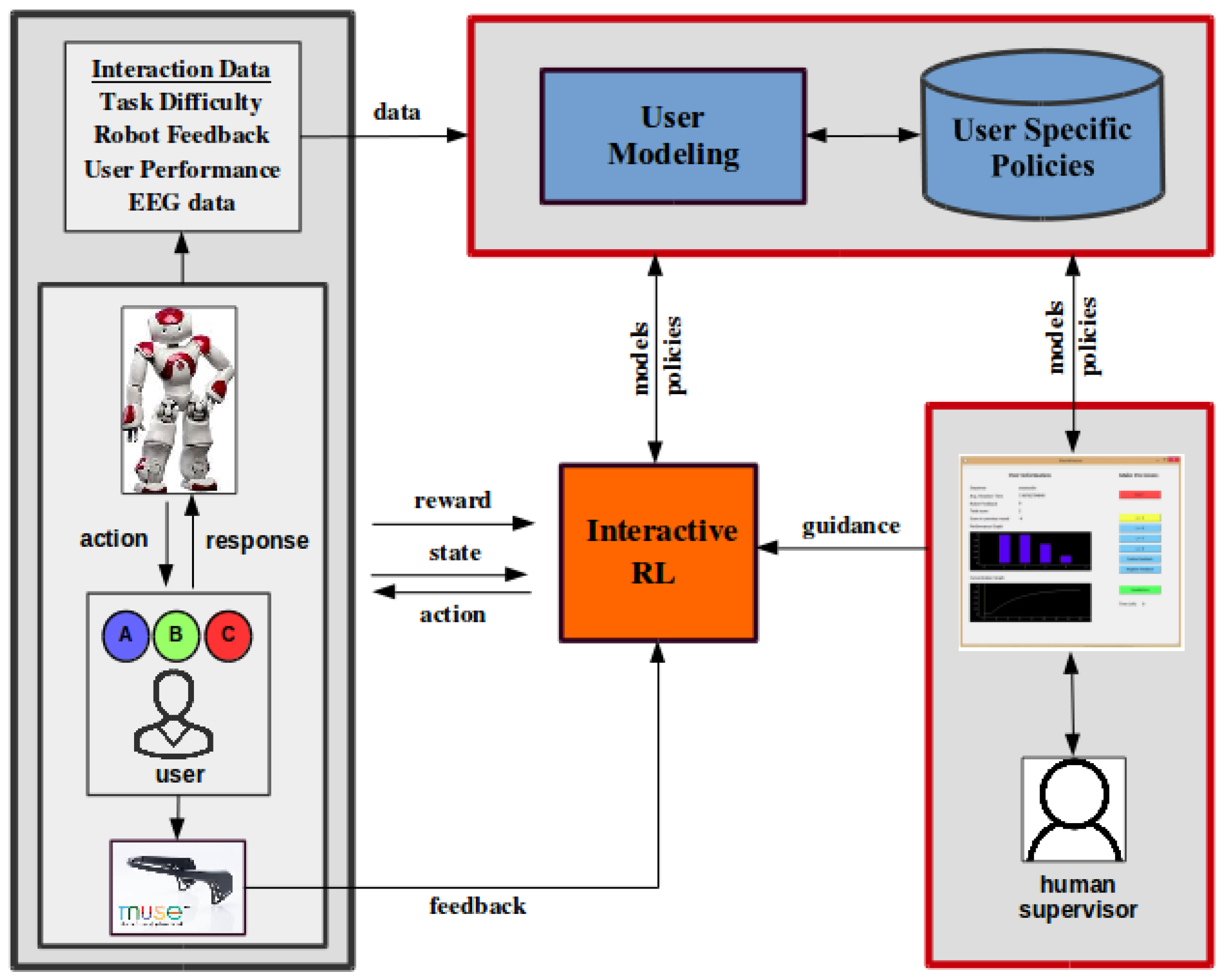
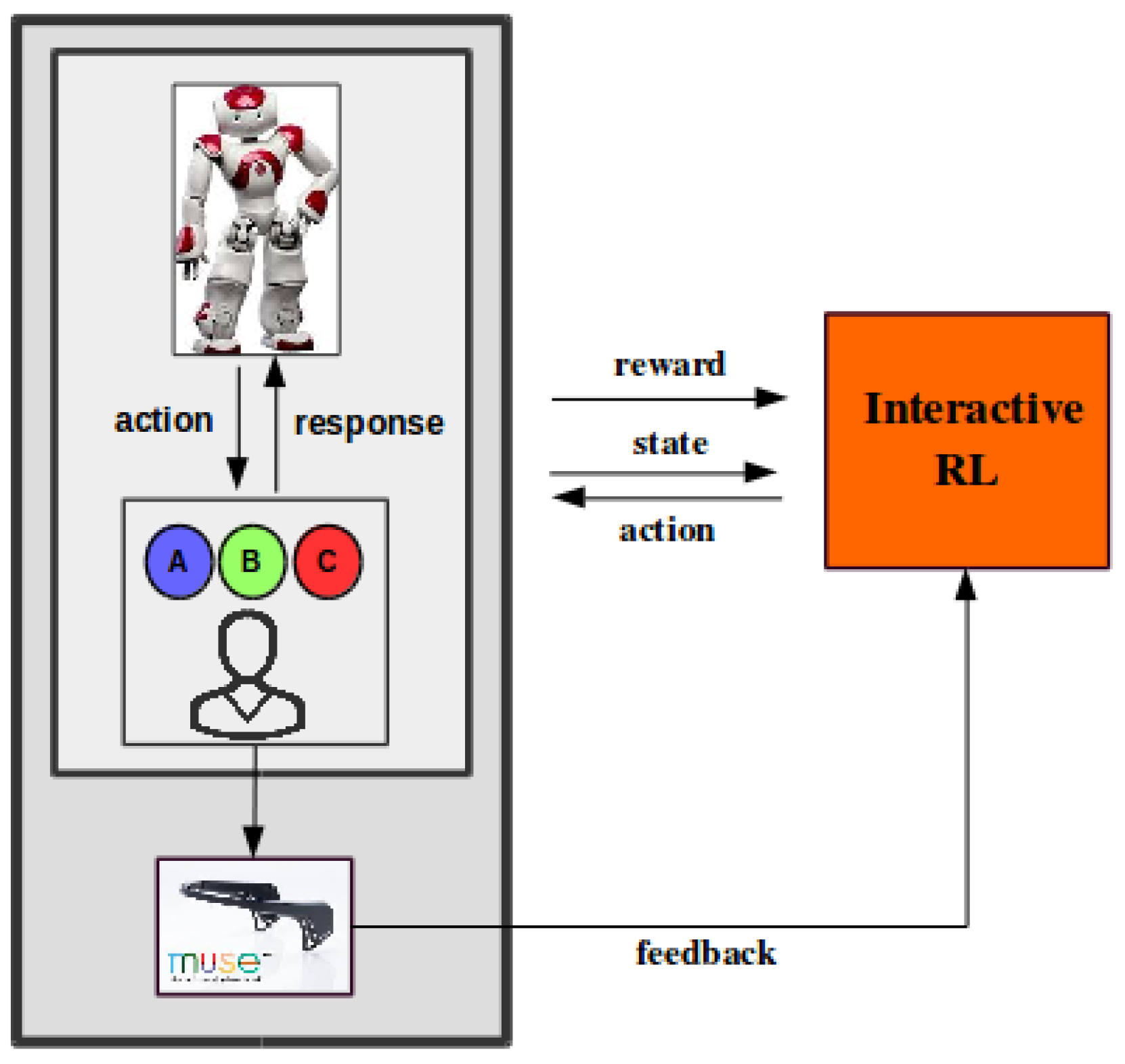
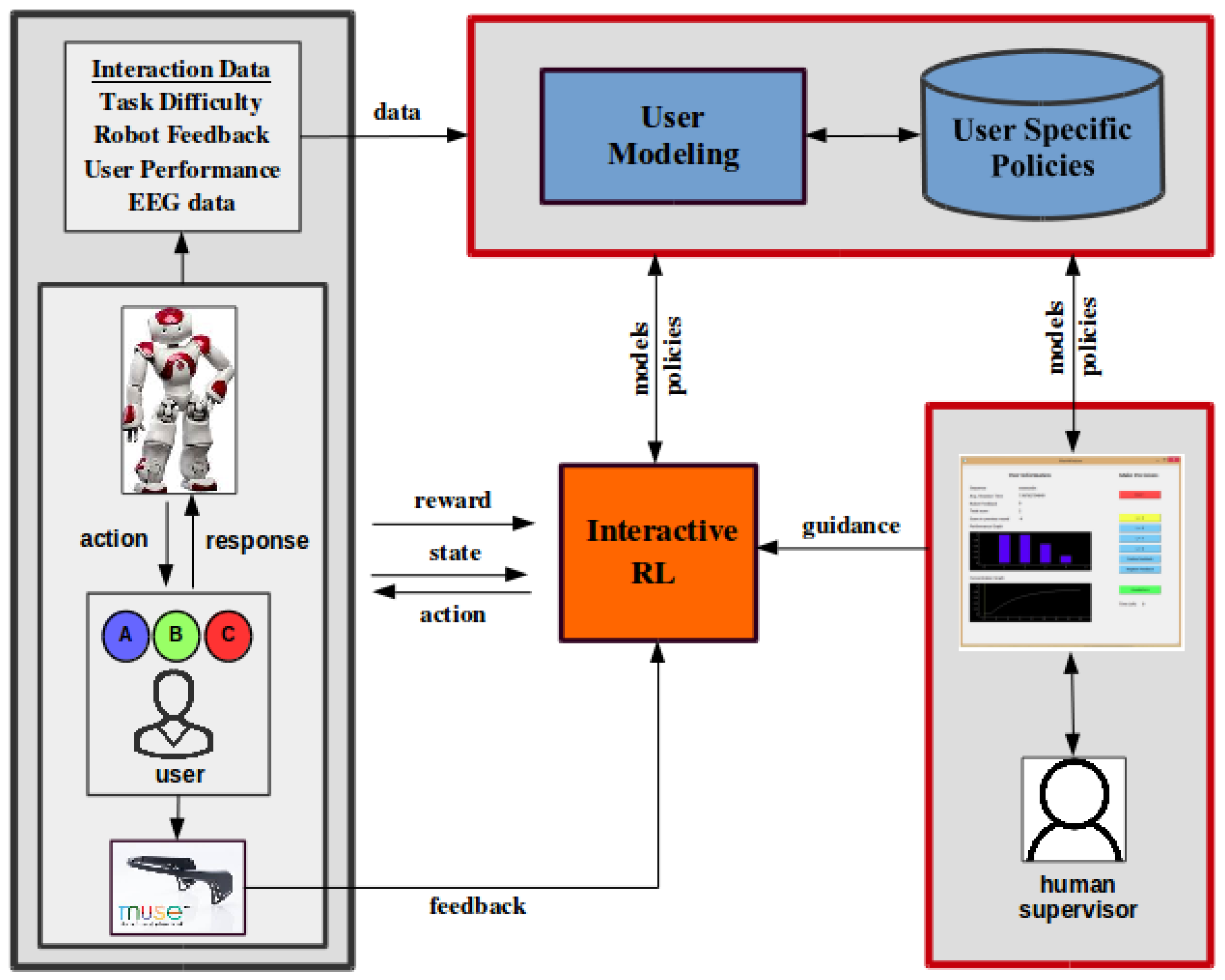
3.2. System Architecture
- S is a finite set of states (state space)
- A is the finite set of available actions (action space)
- T is the transition model where denotes the probability
- is a reward function, which evaluates the transition
- is a discount factor
4. Data Collection and Analysis
4.1. Data Collection
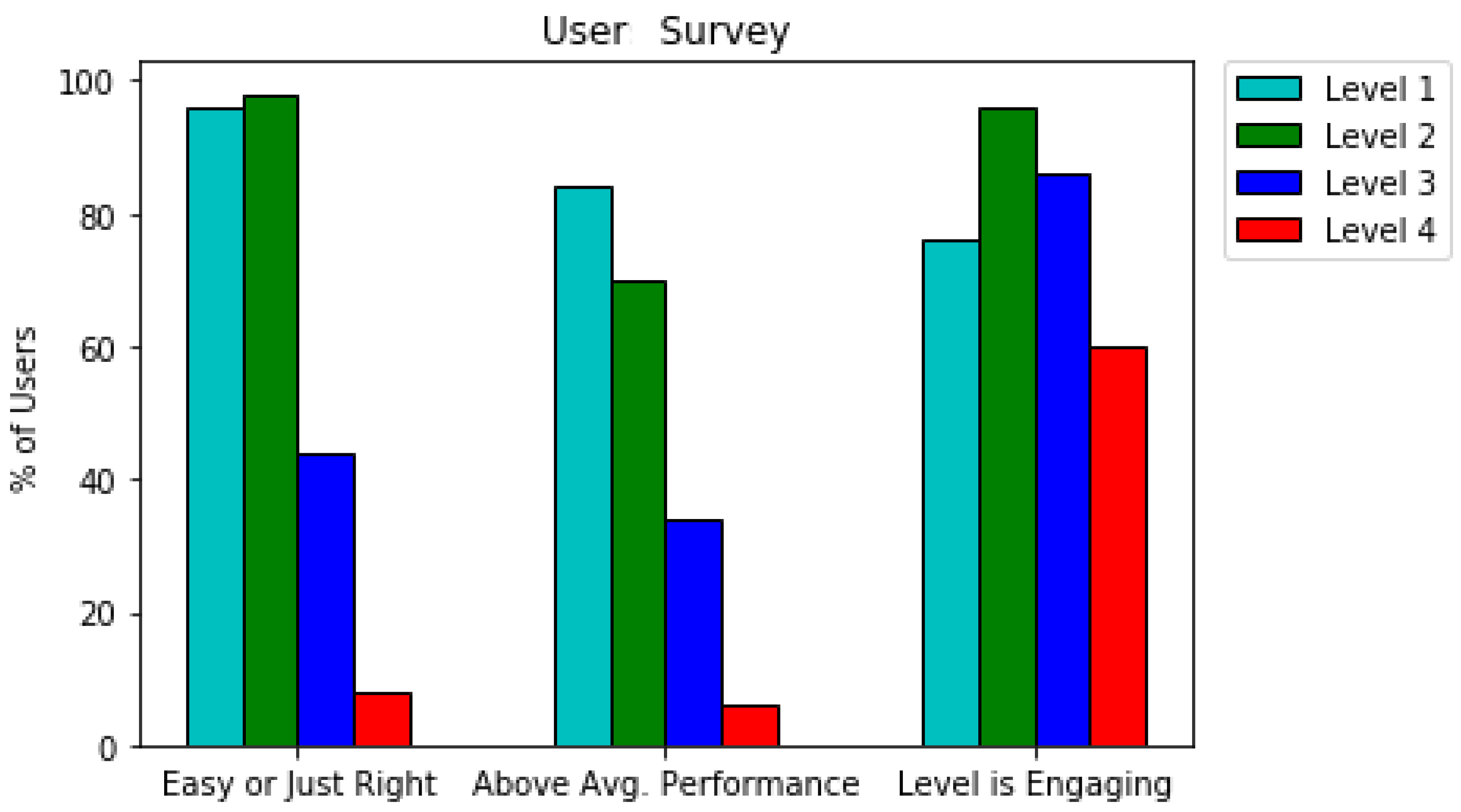
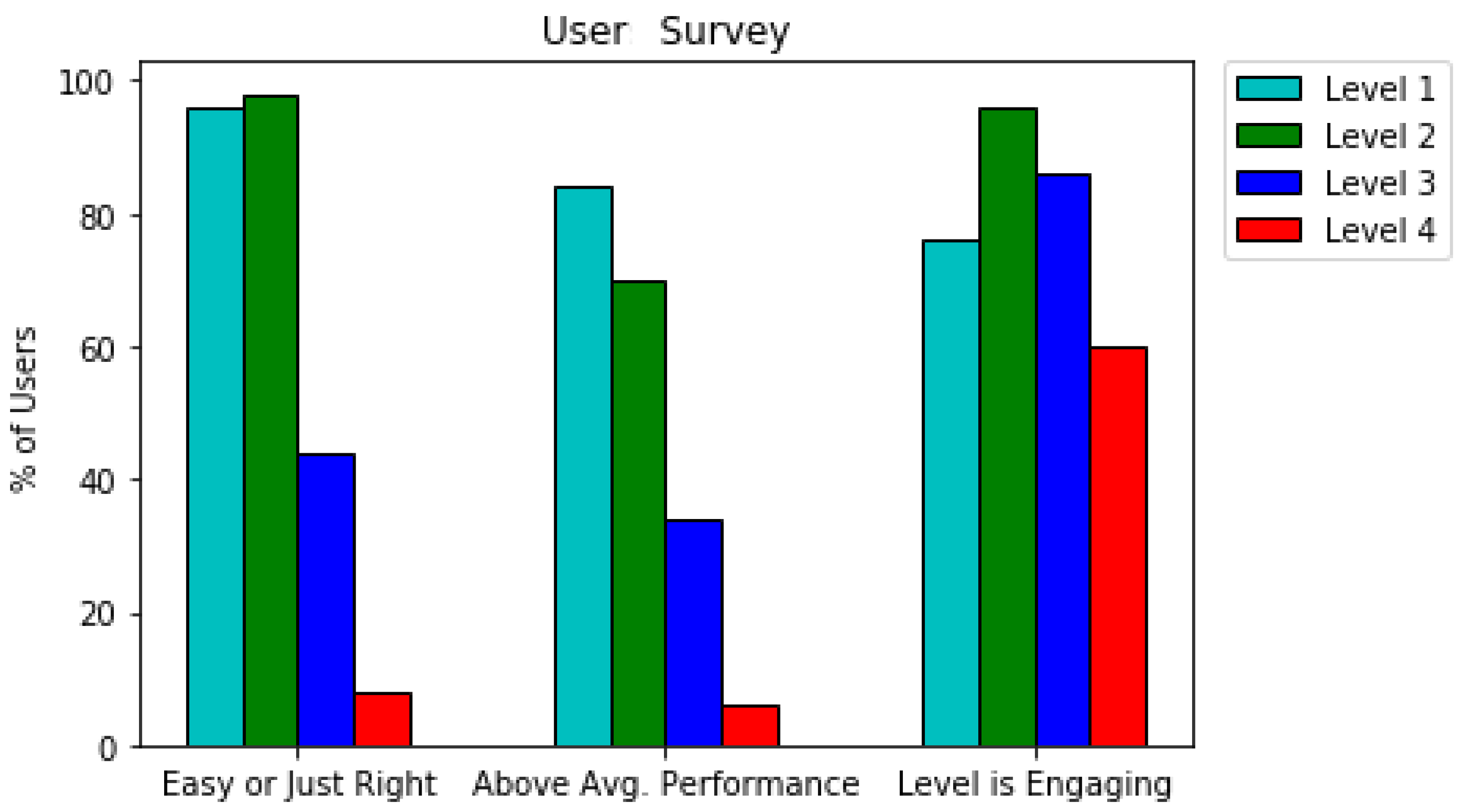
4.2. User Survey
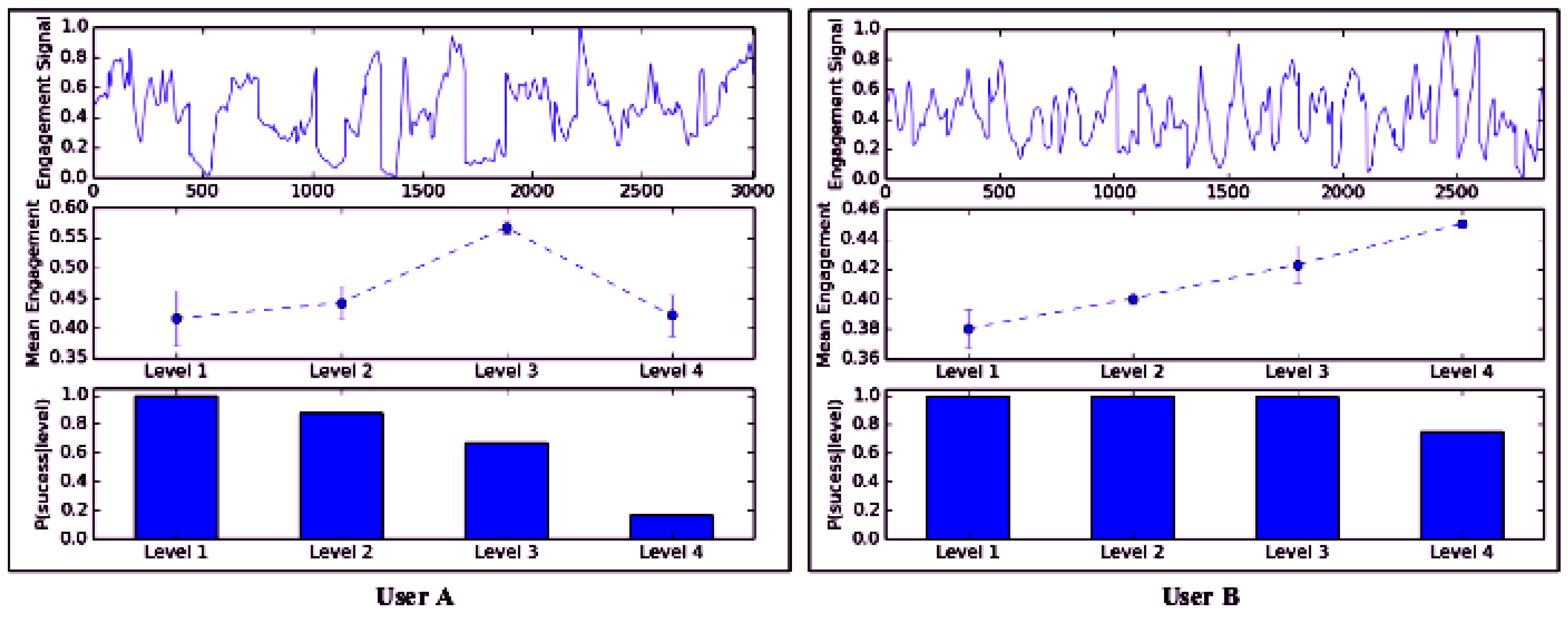
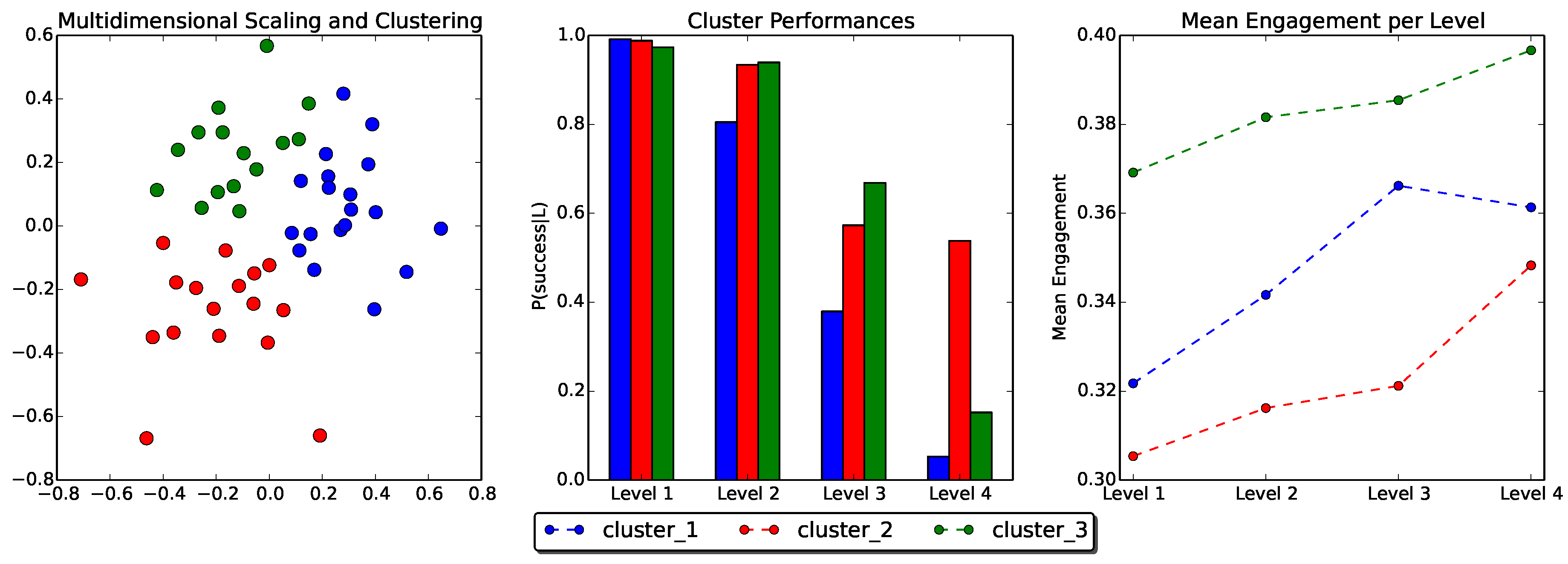
4.3. User Modeling and Clustering
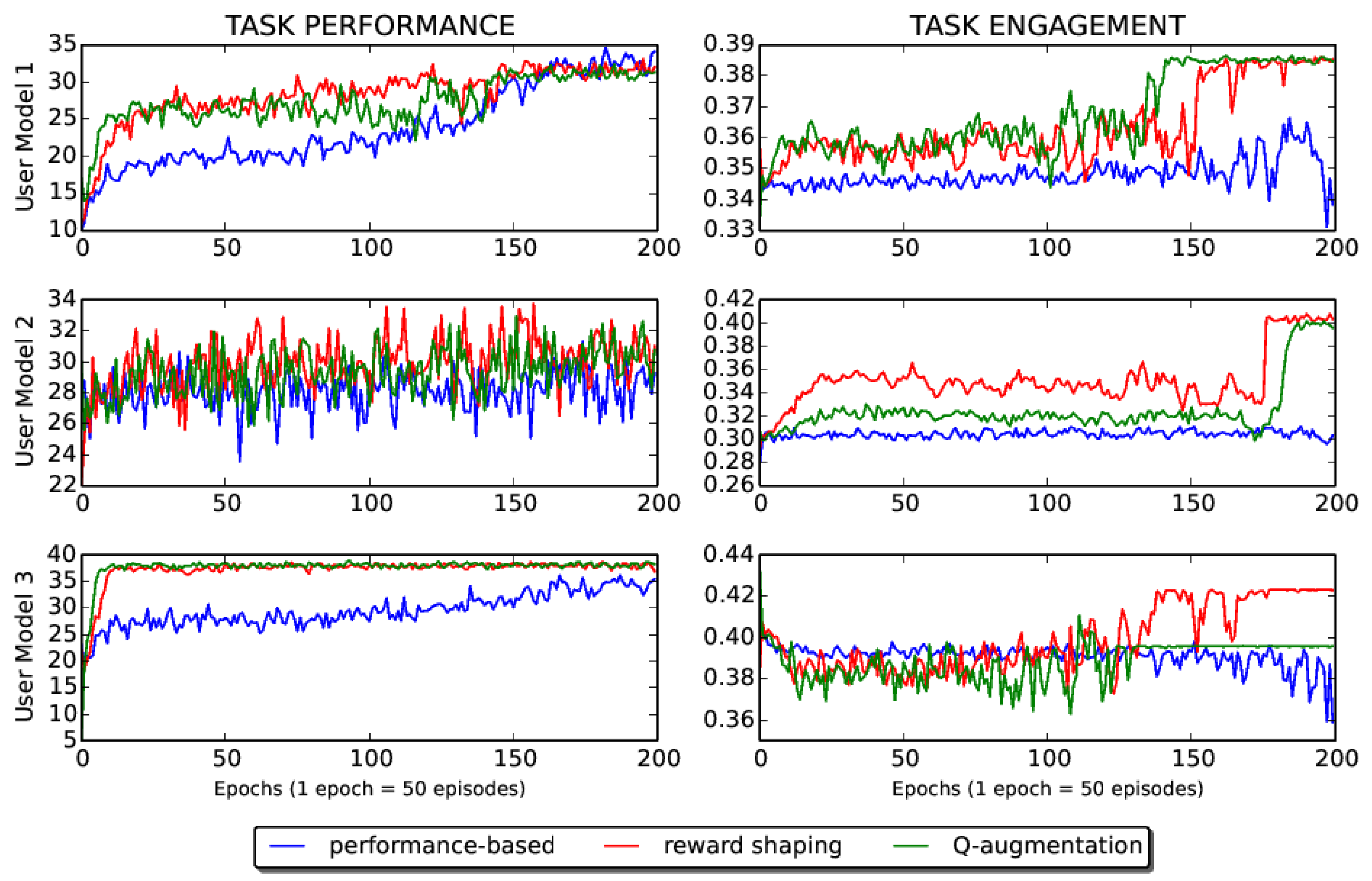
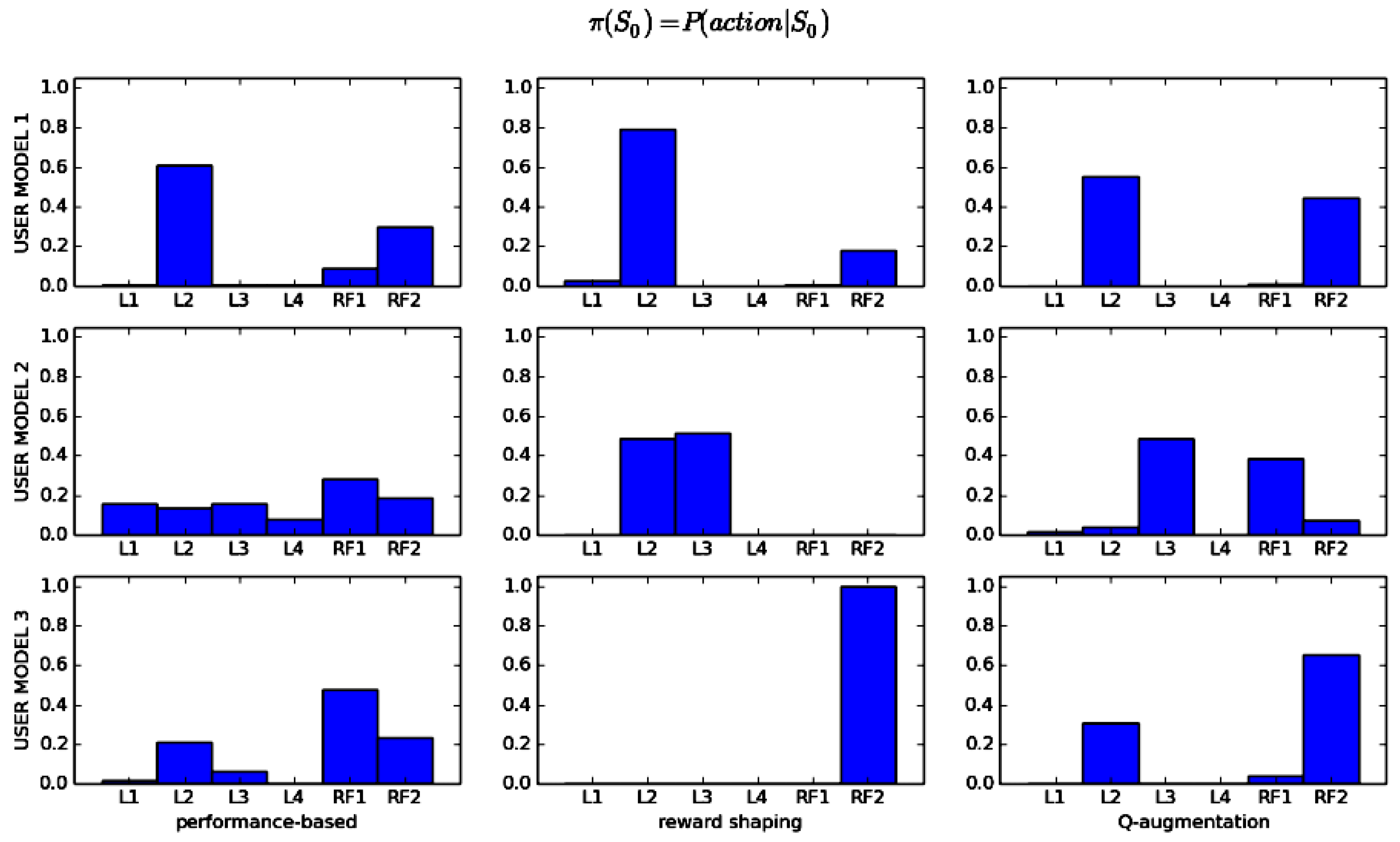
5. Learning Personalized Training Policies for Simulated Users
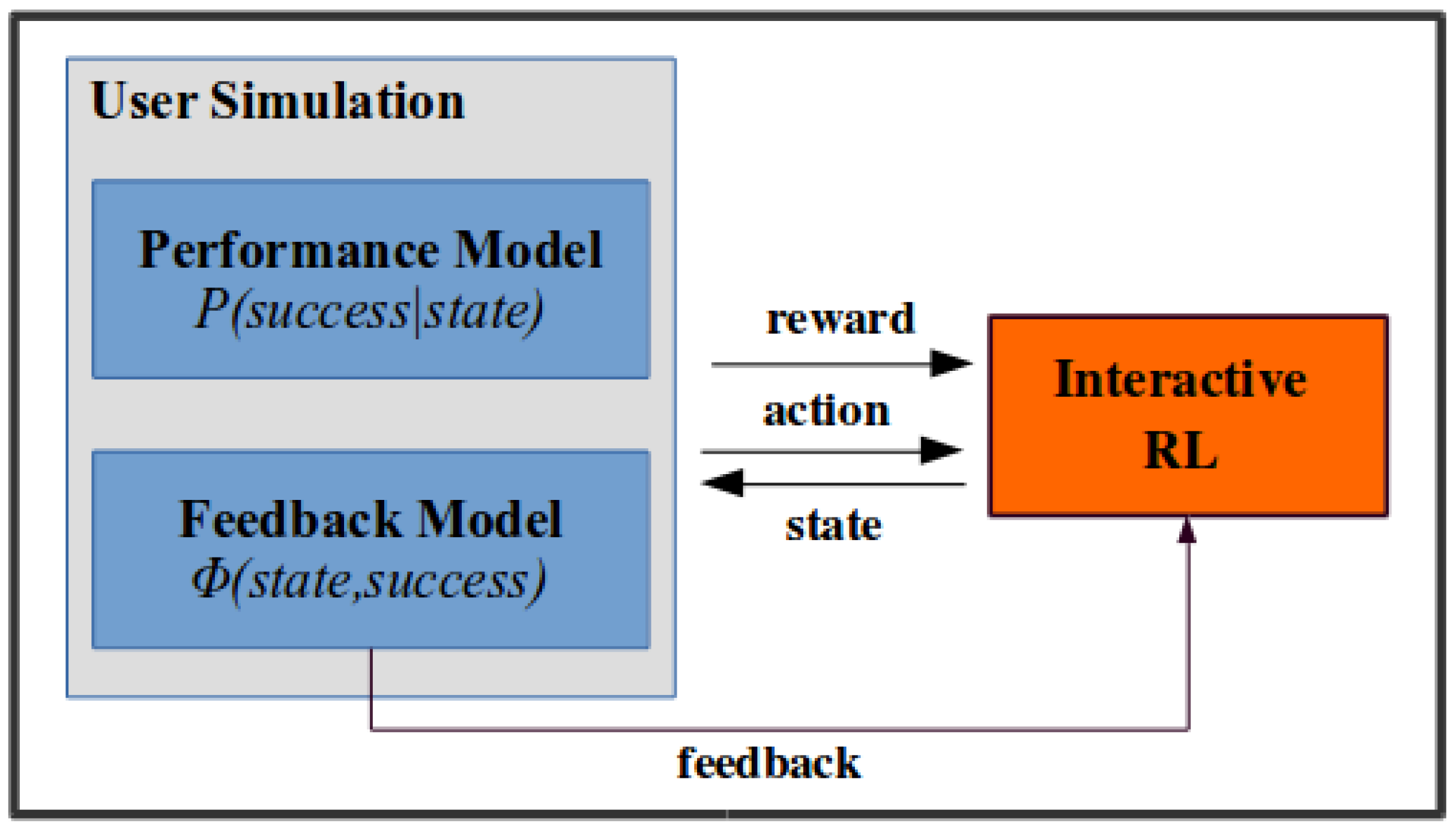
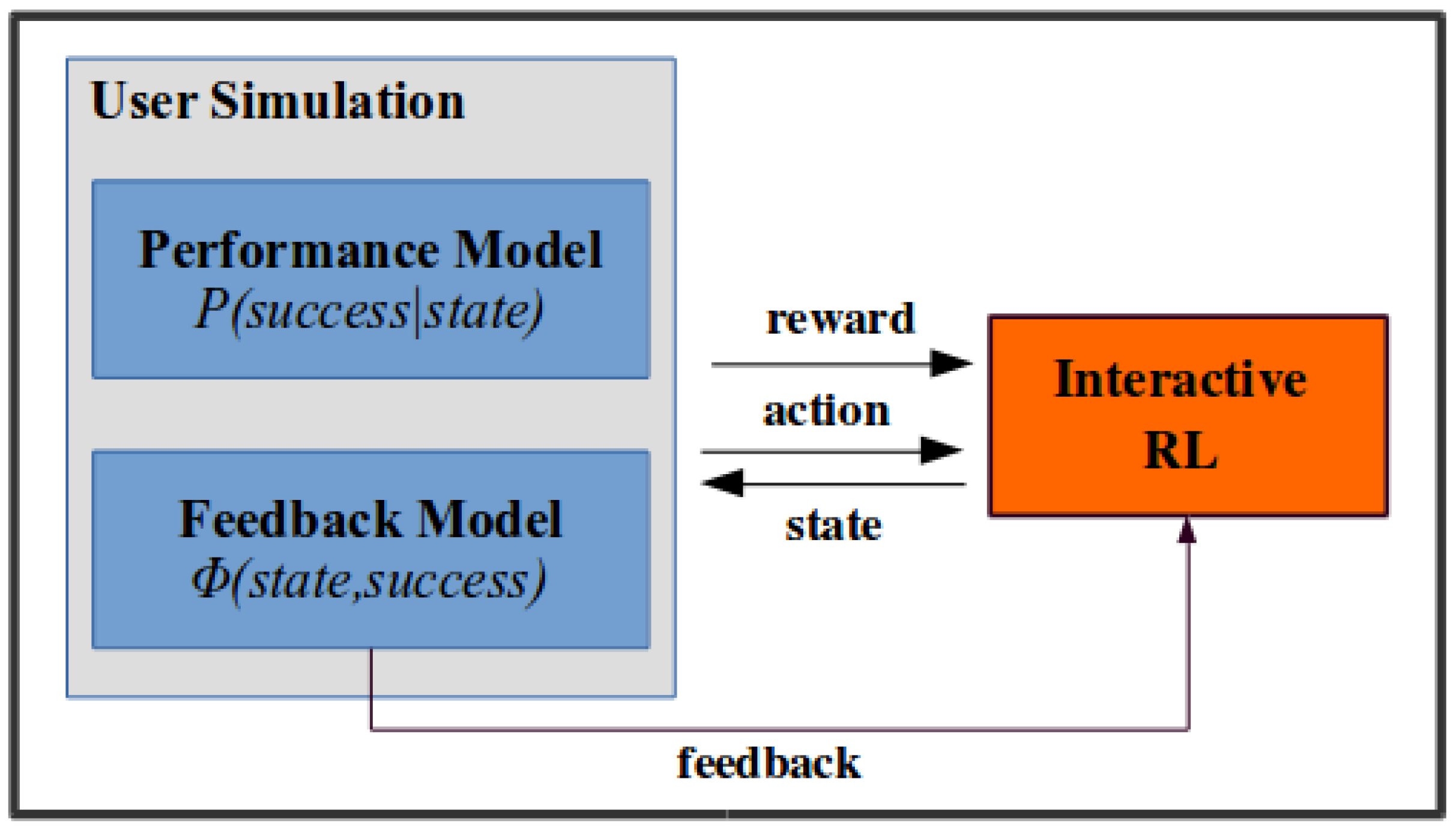
5.1. User Simulation
5.2. Interactive Reinforcement Learning Experiments
6. Discussion and Future Work
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Feil-Seifer, D.; Mataric, M.J. Defining socially assistive robotics. In Proceedings of the 9th International Conference on Rehabilitation Robotics (ICORR 2005), Chicago, IL, USA, 28 June–1 July 2005; pp. 465–468. [Google Scholar]
- Fasola, J.; Matarić, M.J. Robot motivator: Increasing user enjoyment and performance on a physical/cognitive task. In Proceedings of the 2010 IEEE 9th International Conference on Development and Learning, Ann Arbor, MI, USA, 18–21 August 2010; pp. 274–279. [Google Scholar]
- Matarić, M.J.; Eriksson, J.; Feil-Seifer, D.J.; Winstein, C.J. Socially assistive robotics for post-stroke rehabilitation. J. NeuroEng. Rehabil. 2007, 4, 5. [Google Scholar] [CrossRef] [PubMed]
- Gordon, G.; Spaulding, S.; Westlund, J.K.; Lee, J.J.; Plummer, L.; Martinez, M.; Das, M.; Breazeal, C. Affective Personalization of a Social Robot Tutor for Children’s Second Language Skills. In Proceedings of the Thirtieth AAAI Conference on Artificial Intelligence, Phoenix, AZ, USA, 12–17 February 2016. [Google Scholar]
- Mead, R.; Wade, E.; Johnson, P.; Clair, A.S.; Chen, S.; Mataric, M.J. An architecture for rehabilitation task practice in socially assistive human-robot interaction. In Proceedings of the 19th International Symposium in Robot and Human Interactive Communication, Viareggio, Italy, 13–15 September 2010; pp. 404–409. [Google Scholar]
- Bloom, B.S. The 2 sigma problem: The search for methods of group instruction as effective as one-to-one tutoring. Educ. Res. 1984, 13, 4–16. [Google Scholar] [CrossRef]
- Csikszentmihalyi, M. Beyond Boredom and Anxiety; Jossey-Bass: San Francisco, CA, USA, 2000. [Google Scholar]
- Csikszentmihalyi, M. Flow: The Psychology of Optimal Experience; Harper&Row: New York, NY, USA, 1990. [Google Scholar]
- Chanel, G.; Rebetez, C.; Bétrancourt, M.; Pun, T. Boredom, engagement and anxiety as indicators for adaptation to difficulty in games. In Proceedings of the 12th International Conference on Entertainment and Media in the Ubiquitous Era, Tampere, Finland, 7–10 October 2008; ACM: New York, NY, USA, 2008; pp. 13–17. [Google Scholar]
- Yerkes, R.M.; Dodson, J.D. The relation of strength of stimulus to rapidity of habit-formation. J. Comp. Neurol. Psychol. 1908, 18, 459–482. [Google Scholar] [CrossRef]
- Clabaugh, C.; Matarić, M.J. Exploring elicitation frequency of learning-sensitive information by a robotic tutor for interactive personalization. In Proceedings of the 25th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), New York, NY, USA, 26–31 August 2016; pp. 968–973. [Google Scholar]
- Clabaugh, C.E. Interactive Personalization for Socially Assistive Robots. In Proceedings of the Companion of the 2017 ACM/IEEE International Conference on Human-Robot Interaction, Vienna, Austria, 6–9 March 2017; ACM: New York, NY, USA, 2017; pp. 339–340. [Google Scholar]
- Corrigan, L.J.; Basedow, C.; Küster, D.; Kappas, A.; Peters, C.; Castellano, G. Mixing implicit and explicit probes: Finding a ground truth for engagement in social human-robot interactions. In Proceedings of the 2014 ACM/IEEE International Conference on Human-Robot Interaction, Bielefeld, Germany, 3–6 March 2014; ACM: New York, NY, USA, 2014; pp. 140–141. [Google Scholar]
- Canny, J. Interactive Machine Learning; University of California: Berkeley, CA, USA, 2014. [Google Scholar]
- Cuayáhuitl, H.; Renals, S.; Lemon, O.; Shimodaira, H. Human-computer dialogue simulation using hidden markov models. In Proceedings of the IEEE Workshop on Automatic Speech Recognition and Understanding, San Juan, Puerto Rico, 27 November–1 December 2005; pp. 290–295. [Google Scholar]
- Rieser, V.; Lemon, O. Reinforcement Learning for Adaptive Dialogue Systems: A Data-Driven Methodology for Dialogue Management and Natural Language Generation; Springer Science & Business Media: Berlin, Germany, 2011. [Google Scholar]
- Tapus, A.; Ţăpuş, C.; Matarić, M.J. User—robot personality matching and assistive robot behavior adaptation for post-stroke rehabilitation therapy. Intell. Serv. Robot. 2008, 1, 169–183. [Google Scholar] [CrossRef]
- Gao, A.Y.; Barendregt, W.; Castellano, G. Personalised Human-Robot Co-Adaptation in Instructional Settings using Reinforcement Learning. In Proceedings of the Persuasive Embodied Agents for Behavior Change (PEACH2017) Workshop at the International Conference on Intelligent Virtual Agents (IVA2017), Stockholm, Sweden, 27 August 2017. [Google Scholar]
- Ritschel, H.; André, E. Real-Time Robot Personality Adaptation based on Reinforcement Learning and Social Signals. In Proceedings of the Companion of the 2017 ACM/IEEE International Conference on Human-Robot Interaction, Vienna, Austria, 6–9 March 2017; ACM: New York, NY, USA, 2017; pp. 265–266. [Google Scholar]
- Chan, J.; Nejat, G. Social intelligence for a robot engaging people in cognitive training activities. Int. J. Adv. Robot. Syst. 2012, 9, 113. [Google Scholar] [CrossRef]
- Hemminghaus, J.; Kopp, S. Towards Adaptive Social Behavior Generation for Assistive Robots Using Reinforcement Learning. In Proceedings of the 2017 ACM/IEEE International Conference on Human-Robot Interaction, Vienna, Austria, 6–9 March 2017; ACM: New York, NY, USA, 2017; pp. 332–340. [Google Scholar]
- Moro, C. Learning Socially Assistive Robot Behaviors for Personalized Human-Robot Interaction; University of Toronto: Toronto, ON, Canada, 2018. [Google Scholar]
- Senft, E.; Baxter, P.; Kennedy, J.; Belpaeme, T. SPARC: Supervised Progressively Autonomous Robot Competencies. In Proceedings of the International Conference on Social Robotics, Paris, France, 26–30 October 2015; Springer: Berlin, Germany, 2015; pp. 603–612. [Google Scholar]
- Sugiyama, H.; Meguro, T.; Minami, Y. Preference-learning based inverse reinforcement learning for dialog control. In Proceedings of the Thirteenth Annual Conference of the International Speech Communication Association, Portland, OR, USA, 9–13 September 2012. [Google Scholar]
- Tsiakas, K.; Dagioglou, M.; Karkaletsis, V.; Makedon, F. Adaptive robot assisted therapy using interactive reinforcement learning. In Proceedings of the International Conference on Social Robotics, Kansas City, MO, USA, 1–3 November 2016; Springer: Berlin, Germany, 2016; pp. 11–21. [Google Scholar]
- Picard, R.W.; Picard, R. Affective Computing; MIT Press: Cambridge, UK, 1997; Volume 252. [Google Scholar]
- Sabourin, J.L.; Lester, J.C. Affect and engagement in Game-BasedLearning environments. IEEE Trans. Affect. Comput. 2014, 5, 45–56. [Google Scholar] [CrossRef]
- Bosch, N.; D’Mello, S.; Baker, R.; Ocumpaugh, J.; Shute, V.; Ventura, M.; Wang, L.; Zhao, W. Automatic detection of learning-centered affective states in the wild. In Proceedings of the 20th International Conference on Intelligent User Interfaces, Atlanta, GA, USA, 29 March–1 April 2015; ACM: New York, NY, USA, 2015; pp. 379–388. [Google Scholar]
- Fan, J.; Bian, D.; Zheng, Z.; Beuscher, L.; Newhouse, P.A.; Mion, L.C.; Sarkar, N. A Robotic Coach Architecture for Elder Care (ROCARE) based on multi-user engagement models. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 1153–1163. [Google Scholar] [CrossRef] [PubMed]
- Peters, C.; Castellano, G.; de Freitas, S. An exploration of user engagement in HCI. In Proceedings of the International Workshop on Affective-Aware Virtual Agents and Social Robots, Boston, MA, USA, 6 November 2009; ACM: New York, NY, USA, 2009; p. 9. [Google Scholar]
- George, L.; Lécuyer, A. An overview of research on “passive” brain-computer interfaces for implicit human-computer interaction. In Proceedings of the International Conference on Applied Bionics and Biomechanics ICABB 2010-Workshop W1 “Brain-Computer Interfacing and Virtual Reality”, Venise, Italy, 14–16 October 2010. [Google Scholar]
- Szafir, D.; Mutlu, B. Pay attention!: designing adaptive agents that monitor and improve user engagement. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Austin, TX, USA, 5–10 May 2012; ACM: New York, NY, USA, 2012; pp. 11–20. [Google Scholar]
- MUSE. Available online: http://www.choosemuse.com/ (accessed on 11 May 2018).
- Li, Z.; Xu, J.; Zhu, T. Prediction of Brain States of Concentration and Relaxation in Real Time with Portable Electroencephalographs. arXiv, 2015; arXiv:1509.07642. [Google Scholar]
- Abujelala, M.; Abellanoza, C.; Sharma, A.; Makedon, F. Brain-ee: Brain enjoyment evaluation using commercial eeg headband. In Proceedings of the 9th ACM International Conference on PErvasive Technologies Related to Assistive Environments, Corfu, Greece, 29 June–1 July 2016; ACM: New York, NY, USA, 2016; p. 33. [Google Scholar]
- Liu, X.; Tan, P.N.; Liu, L.; Simske, S.J. Automated Classification of EEG Signals for Predicting Students’ Cognitive State during Learning. In Proceedings of the International Conference on Web Intelligence, Leipzig, Germany, 23–26 August 2017; ACM: New York, NY, USA, 2017; pp. 442–450. [Google Scholar]
- Karydis, T.; Aguiar, F.; Foster, S.L.; Mershin, A. Performance characterization of self-calibrating protocols for wearable EEG applications. In Proceedings of the 8th ACM International Conference on PErvasive Technologies Related to Assistive Environments, Corfu, Greece, 1–3 July 2015; ACM: New York, NY, USA, 2015; p. 38. [Google Scholar]
- Pope, A.T.; Bogart, E.H.; Bartolome, D.S. Biocybernetic system evaluates indices of operator engagement in automated task. Biol. Psychol. 1995, 40, 187–195. [Google Scholar] [CrossRef]
- McMahan, T.; Parberry, I.; Parsons, T.D. Evaluating player task engagement and arousal using electroencephalography. Proc. Manuf. 2015, 3, 2303–2310. [Google Scholar] [CrossRef]
- Knox, W.B.; Stone, P. Reinforcement learning from simultaneous human and MDP reward. In Proceedings of the 11th International Conference on Autonomous Agents and Multiagent Systems, Valencia, Spain, 4–8 June 2012; Volume 1, pp. 475–482. [Google Scholar]
- Broekens, J. Emotion and reinforcement: Affective facial expressions facilitate robot learning. In Artificial Intelligence for Human Computing; Springer: Berlin/Heidelberg, Germany, 2007; pp. 113–132. [Google Scholar]
- Seo, Y.W.; Zhang, B.T. A reinforcement learning agent for personalized information filtering. In Proceedings of the 5th International Conference on Intelligent User Interfaces, New Orleans, LA, USA, 9–12 January 2000; ACM: New York, NY, USA, 2000; pp. 248–251. [Google Scholar]
- Gathercole, S.E.; Baddeley, A.D. Working Memory and Language; Psychology Press: Hoboken, NJ, USA, 2014. [Google Scholar]
- Cognition Measures. Available online: http://www.healthmeasures.net/explore-measurement-systems/nih-toolbox/intro-to-nih-toolbox/cognition (accessed on 11 May 2018).
- Who is NAO? Available online: https://www.ald.softbankrobotics.com/en/robots/nao (accessed on 11 May 2018).
- Park, E.; Kim, K.J.; Del Pobil, A.P. The effects of a robot instructor’s positive vs. negative feedbacks on attraction and acceptance towards the robot in classroom. In Proceedings of the International Conference on Social Robotics, Amsterdam, The Netherlands, 24–25 November 2011; Springer: Berlin, Germany, 2011; pp. 135–141. [Google Scholar]
- Tsiakas, K.; Abellanoza, C.; Abujelala, M.; Papakostas, M.; Makada, T.; Makedon, F. Towards Designing a Socially Assistive Robot for Adaptive and Personalized Cognitive Training. In Proceedings of the Robots 4 Learning Workshop R4L@HRI, Vienna, Austria, 6–9 March 2017. [Google Scholar]
- Sequence-learning-dataset. Available online: https://github.com/TsiakasK/sequence-learning-dataset (accessed on 11 May 2018).
- Papakostas, M.; Tsiakas, K.; Giannakopoulos, T.; Makedon, F. Towards predicting task performance from EEG signals. In Proceedings of the International Conference on Big Data, Boston, MA, USA, 11–14 December 2017. [Google Scholar]
- Clabaugh, C.; Tsiakas, K.; Mataric, M. Predicting Preschool Mathematics Performance of Children with a Socially Assistive Robot Tutor. In Proceedings of the Synergies between Learning and Interaction Workshop @ IROS, Vancouver, BC, Canada, 24–28 September 2017. [Google Scholar]
- So, W.K.; Wong, S.W.; Mak, J.N.; Chan, R.H. An evaluation of mental workload with frontal EEG. PLoS ONE 2017, 12, e0174949. [Google Scholar] [CrossRef] [PubMed]
- Käser, T.; Klingler, S.; Schwing, A.G.; Gross, M. Dynamic Bayesian Networks for Student Modeling. IEEE Trans. Learn. Technol. 2017, 10, 450–462. [Google Scholar] [CrossRef]
- Papudesi, V.N. Integrating Advice with Reinforcement Learning. Ph.D. Thesis, University of Texas at Arlington, Austin, TX, USA, 2002. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Encouraging Feedback | |
| success | “That was great! keep up the good work” |
| failure | “Oh, that was wrong! But that’s fine! don’t give up!” |
| Challenging Feedback | |
| success | “OK, that was easy enough! Let’s see now…” |
| failure | “Hey! Are you there? Stay focused when I speak!” |
| State Features | System Actions | Reward |
|---|---|---|
| Sequence Length (SL) | Level 1 (L3) | Current Score |
| Robot Feedback (RF) | Level 2 (L5) | Task Engagement |
| Previous Result (PR) | Level 3 (L7) | |
| Level 4 (L9) | ||
| Encouraging Feedback (RF1) | ||
| Challenging Feedback (RF2) |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tsiakas, K.; Abujelala, M.; Makedon, F. Task Engagement as Personalization Feedback for Socially-Assistive Robots and Cognitive Training. Technologies 2018, 6, 49. https://doi.org/10.3390/technologies6020049
Tsiakas K, Abujelala M, Makedon F. Task Engagement as Personalization Feedback for Socially-Assistive Robots and Cognitive Training. Technologies. 2018; 6(2):49. https://doi.org/10.3390/technologies6020049
Chicago/Turabian StyleTsiakas, Konstantinos, Maher Abujelala, and Fillia Makedon. 2018. "Task Engagement as Personalization Feedback for Socially-Assistive Robots and Cognitive Training" Technologies 6, no. 2: 49. https://doi.org/10.3390/technologies6020049
APA StyleTsiakas, K., Abujelala, M., & Makedon, F. (2018). Task Engagement as Personalization Feedback for Socially-Assistive Robots and Cognitive Training. Technologies, 6(2), 49. https://doi.org/10.3390/technologies6020049