Adaptive Communication Techniques for the Internet of Things

Abstract
:1. Introduction
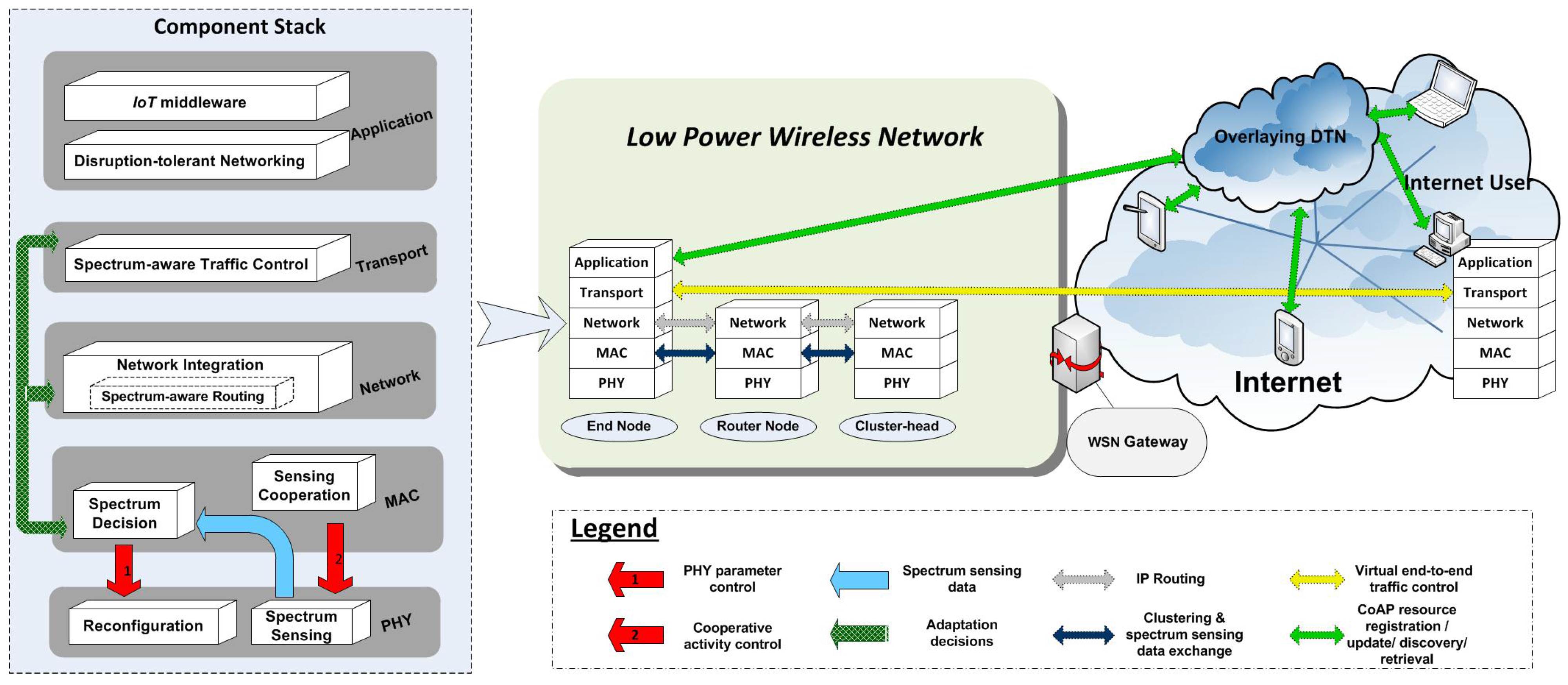
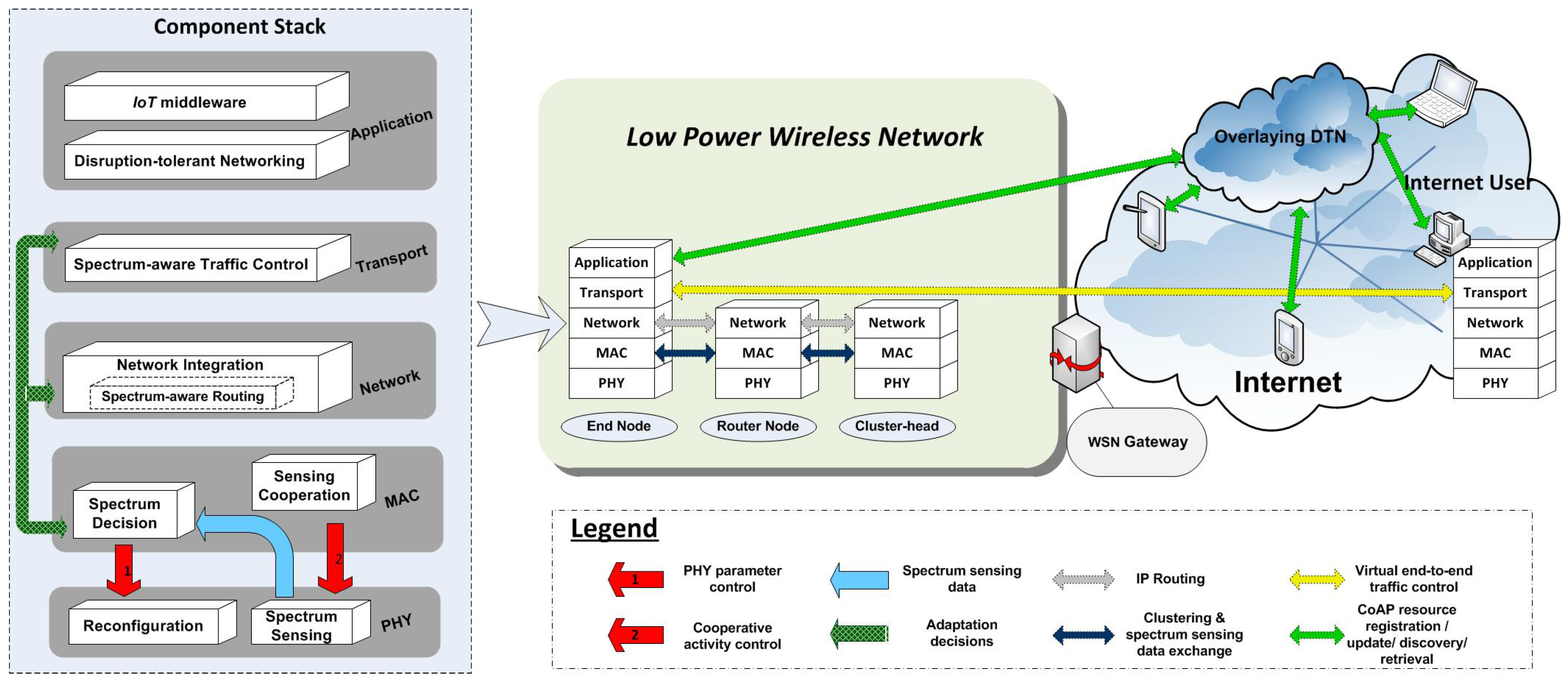
2. A Conceptual Model for Adaptive IoT Communications
3. Physical Layer
3.1. Spectrum Sensing Techniques

{kind=link}
| Technique | Prior signal info | Synchronization | Multiple Target Detection | Sensing Duration | Transmission Disruption | Computational Complexity |
|---|---|---|---|---|---|---|
| Matched Filter [14,15,21,22,23] | Required | With target signal | With dedicated antennas | Short | None (with dedicated antennas) | Medium |
| Cyclostationary Feature [15,17,20,24] | Required | Not required | Yes | Long | None | High |
| Energy Detection [23,25,26,27] | Not required | With adaptive peers | Not supported | Medium | Suspended during sensing periods | Low |
| Eigenvalue-based Detection [28,29,30,31] | Not required | Not required | Yes | Flexible | None | High |
3.1.1. Matched Filter
3.1.2. Cyclostationary Feature Detection
3.1.3. Energy Detection
3.1.4. Eigenvalue-Based Detection
3.2. Reconfigurability
3.3. Summary of Adaptive PHY
4. Media Access Control
4.1. Local Sensing Configuration
4.1.1. Sensing Mode
4.1.2. Sensing Duration
| Pros | Cons | ||
| Mode [23,27,39] | Reactive | Reduced sensing operation and related overhead Higher transmission throughput | Limited knowledge of spectral condition Delay if frequency adaptation is needed before transmission |
| Proactive | Updated knowledge of spectrum characteristics Quick in finding available channels | Higher energy cost Affected throughput | |
| Duration [26,42,44,45,46] | Long | More statistics leading to better accuracy | Higher energy cost Affected throughput |
| Short | Longer lifetime Less disruption to transmissions | Suboptimal sensing results |
4.1.3. Tradeoffs of Local Sensing Operation Configurations
4.2. Cooperative Sensing
4.2.1. Cooperation Architectures
4.2.2. Sensing Scheduling
4.2.3. Decision Formulation
4.2.4. Summary of Cooperative Sensing
| Cooperation Model | Controlling Entity | Spectrum Decision | Control Channel | Traffic Overhead | Power Consumption |
|---|---|---|---|---|---|
| Centralized [47,53,54,55,56,57,58,59,60] | Pre-appointed Fusion Center | Network-wide agreement | Unified | High | Inefficient |
| Clustered [26,68,69,70,96,97,98] | Cluster-heads | Autonomously made by each cluster | Cluster-wise | Restricted | Mitigated |
| Pros | Cons | ||
| Coordination [20,54,56] | Random | Implementional simplicity | Complex PHY techniques required |
| TDMA | Suitable for simple energy detection | Synchronization overhead |
| Fusion Mode | Report Data Type | Transmission Overhead | Computational Overhead | Performance |
|---|---|---|---|---|
| Soft Fusion [3,53,59,99] | Preprocessed / raw data | High | High | Finer control given the fullness of information |
| Hard Combination [52,57,79,80,81] | Binary decision | Low | Low | Subject to limited information of local decisions |
5. Network Layer
5.1. Spectrum Awareness and Routing
5.2. Network Integration
5.3. Summary
6. Transport Layer
6.1. Summary
7. Application Layer
7.1. Delay- and Disruption-Tolerant Networking (DTN)
7.2. Application Layer Interoperability
7.3. Summary
8. Cross-Layer Optimization
8.1. Summary
9. Conclusion
References
- ITU. ITU Internet Reports 2005: The Internet of Things; Technical Report; ITU: Geneva, Switzerland, 2005. [Google Scholar]
- Ovidiu, V.; Harrison, M.; Vogt, H.; Kalaboukas, K.; Tomasella, M.; Wouters, K.; Gusmeroli, S.; Haller, S. Internet of Things Strategic Research Roadmap; European Commission-Information Society and Media DG: Brussels, Belgium, 2009. [Google Scholar]
- Du, P.; Roussos, G. Adaptive Channel Hopping for Wireless Sensor Networks. In Proceedings of the 2011 International Conference on Selected Topics in Mobile and Wireless Networking (iCOST), Shanghai, China, 10–12 October 2011.
- Atzori, L.; Iera, A.; Morabito, G. The internet of things: A survey. Comput. Netw. 2010, 54, 2787–2805. [Google Scholar] [CrossRef]
- Benini, L.; Farella, E.; Guiducci, C. Wireless sensor networks: Enabling technology for ambient intelligence. Microelectron. J. 2006, 37, 1639–1649. [Google Scholar] [CrossRef]
- Mainetti, L.; Patrono, L.; Vilei, A. Evolution of Wireless Sensor Networks towards the Internet of Things: A Survey. In Proceedings of 2011 19th International Conference on the Software, Telecommunications and Computer Networks (SoftCOM), Adriatic Islands Split, Croatia, 15–17 September 2011; pp. 1–6.
- Tsitsigkos, A.; Entezami, F.; Ramrekha, T.; Politis, C.; Panaousis, E. A Case Study of Internet of Things Using Wireless Sensor Networks and Smartphones. In Proceedings of the Wireless World Research Forum (WWRF) Meeting: Technologies and Visions for a Sustainable Wireless Internet, Athens, Greece, 23–25 April 2012.
- Day, J.D.; Zimmermann, H. The OSI Reference Model. In Conformance Testing Methodologies and Architectures for OSI Protocols; Linn, R.J., Uyar, M.U., Eds.; IEEE Computer Society Press: Los Alamitos, CA, USA, 1995; pp. 38–44. [Google Scholar]
- Leiner, B.M.; Cole, R.; Postel, J.; Mills, D. The DARPA internet protocol suite. IEEE Commun. Mag. 1985, 23, 29–34. [Google Scholar] [CrossRef]
- Chen, K.C.; Peng, Y.J.; Prasad, N.; Liang, Y.C.; Sun, S. Cognitive Radio Network Architecture: Part II—Trusted Network Layer Structure. In Proceedings of the 2nd International Conference on Ubiquitous Information Management and Communication, Kota Kinabalu, Malaysia; pp. 120–124.
- Shelby, Z.; Bormann, C. 6LoWPAN: The Wireless Embedded Internet; Wiley Publishing: Weinheim, Germany, 2010. [Google Scholar]
- Goth, G. Delay-tolerant network technologies coming together. IEEE Distrib. Syst. Online 2006, 7, 2. [Google Scholar] [CrossRef]
- Farrell, S.; Cahill, V.; Geraghty, D.; Humphreys, I.; McDonald, P. When TCP breaks: Delay-and disruption-tolerant networking. IEEE Int. Comput. 2006, 10, 72–78. [Google Scholar] [CrossRef]
- Cabric, D.; Mishra, S.M.; Brodersen, R.W. Implementation Issues in Spectrum Sensing for Cognitive Radios. In Proceedings of the 38th Asilomar Conference Signals, Systems, and Computers, Pacific Grove, California, CA, USA, 7–10 November 2004; pp. 772–776.
- Cabric, D.; Brodersen, R.W. Physical Layer Design Issues Unique to Cognitive Radio Systems. In Proceedings of the 16th IEEE International Symposium on Personal Indoor and Mobile Radio Communications (PIMRC 2005), Berlin, Germany, 11–14 September 2005.
- Tian, Z.; Giannakis, G.B. Compressed Sensing for Wideband Cognitive Radios. In Proceedings of the 2007 IEEE International Conference on Acoustics Speech and Signal Processing (ICASSP 07), Honolulu, HI, USA, 15–20 April 2007; Volume 4, pp. IV:1357–IV:1360.
- Lundén, J.; Koivunen, V.; Huttunen, A.; Poor, H.V. Collaborative cyclostationary spectrum sensing for cognitive radio systems. Trans. Signal Proc. 2009, 57, 4182–4195. [Google Scholar] [CrossRef]
- Ben Letaief, K.; Zhang, W. Cooperative communications for cognitive radio networks. Proc. IEEE 2009, 97, 878–893. [Google Scholar] [CrossRef]
- Zeng, Y.; Liang, Y.C.; Hoang, A.T.; Zhang, R. A review on spectrum sensing for cognitive radio: Challenges and solutions. EURASIP J. Adv. Signal Process 2010, 2010, 2:2–2:2. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Lo, B.F.; Balakrishnan, R. Cooperative spectrum sensing in cognitive radio networks: A survey. Phys. Commun. 2011, 4, 40–62. [Google Scholar] [CrossRef]
- Cabric, D.; Tkachenko, A.; Brodersen, R.W. Spectrum Sensing Measurements of Pilot, Energy, and Collaborative Detection. In Proceedings of the 2006 IEEE Conference on Military Communications, Washington, DC, USA, 23–25 October 2006; pp. 1–7.
- Budiarjo, I.; Lakshmanan, M.K.; Nikookar, H. Cognitive radio dynamic access techniques. Wirel. Pers. Commun. 2008, 45, 293–324. [Google Scholar] [CrossRef]
- Ghasemi, A.; Sousa, E. Spectrum sensing in cognitive radio networks: Requirements, challenges and design trade-offs. IEEE Commun. Mag. 2008, 46, 32–39. [Google Scholar] [CrossRef]
- Fehske, A.; Gaeddert, J.; Reed, J. A New Approach to Signal Classification Using Spectral Correlation and Neural Networks. In Proceedings of 2005 First IEEE International Symposium on the New Frontiers in Dynamic Spectrum Access Networks (DySPAN), Baltimore, MA, USA, 8–11 November 2005.
- Digham, F.F.; Alouini, M.S.; Simon, M.K. On the energy detection of unknown signals over fading channels. IEEE Trans. Commun. 2007, 55, 21–24. [Google Scholar] [CrossRef]
- Kim, H.; Shin, K.G. In-band Spectrum Sensing in Cognitive Radio Networks: Energy Detection or Feature Detection? In Proceedings of the 14th ACM International Conference on Mobile Computing And Networking, San Francisco, CA, USA, 14–19 September 2008; pp. 14–25.
- Yucek, T.; Arslan, H. A survey of spectrum sensing algorithms for cognitive radio applications. IEEE Commun. Surv. Tutor. 2009, 11, 116–130. [Google Scholar] [CrossRef]
- Zeng, Y.; Liang, Y.C. Maximum-Minimum Eigenvalue Detection for Cognitive Radio. In Proceedings of IEEE 18th International Symposium on the Personal, Indoor and Mobile Radio Communications (PIMRC 2007), Athens, Greece, 3-7 September 2007; pp. 1–5.
- Zeng, Y.; Liang, Y.-C. Eigenvalue-based spectrum sensing algorithms for cognitive radio. IEEE Trans. Commun. 2009, 57, 1784–1793. [Google Scholar] [CrossRef]
- Penna, F.; Garello, R.; Spirito, M. Cooperative spectrum sensing based on the limiting eigenvalue ratio distribution in wishart matrices. IEEE Commun. Lett. 2009, 13, 507–509. [Google Scholar] [CrossRef]
- Kortun, A.; Ratnarajah, T.; Sellathurai, M.; Zhong, C. On the Performance of Eigenvalue-Based Spectrum Sensing for Cognitive Radio. In Proceedings of 2010 IEEE Symposium on the New Frontiers in Dynamic Spectrum, Singapore, 6-9 April 2010; pp. 1–6.
- Akan, O.B.; Karli, O.B.; Ergul, O. Cognitive radio sensor networks. Netw. Mag. Glob. Int. 2009, 23, 34–40. [Google Scholar] [CrossRef]
- Cabric, D.; Tkachenko, A.; Brodersen, R.W. Experimental Study of Spectrum Sensing Based on Energy Detection and Network Cooperation. In Proceedings of the First International Workshop on Technology and Policy for Accessing Spectrum, Boston, MA, USA, 5 August 2006.
- Quan, Z.; Cui, S.; Sayed, A.H.; Poor, H.V. Optimal multiband joint detection for spectrum sensing in cognitive radio networks. Trans. Signal Proc. 2009, 57, 1128–1140. [Google Scholar] [CrossRef]
- Haykin, S. Cognitive radio: Brain-empowered wireless communications. IEEE J. Sel. Areas Commun. 2005, 23, 201–220. [Google Scholar] [CrossRef]
- Jondral, F.K. Software-defined radio: Basics and evolution to cognitive radio. EURASIP J. Wirel. Commun. Netw. 2005, 2005, 275–283. [Google Scholar] [CrossRef]
- Schmid, T.; Sekkat, O.; Srivastava, M.B. An Experimental Study of Network Performance Impact of Increased Latency in Software Defined Radios. In Proceedings of the Second ACM International Workshop on Wireless Network Testbeds, Experimental Evaluation and Characterization, Montreal, QC, Canada, 9–14 September 2007; pp. 59–66.
- Blossom, E. GNU radio: Tools for exploring the radio frequency spectrum. Linux J. 2004, 2004, 4. [Google Scholar]
- Kim, H.; Shin, K. Adaptive MAC-Layer Sensing of Spectrum Availability in Cognitive Radio Networks; Technical Report; University of Michigan: Ann Arbor, MI, USA, 2006. [Google Scholar]
- Zhao, Q.; Tong, L.; Swami, A. Decentralized Cognitive Mac for Dynamic Spectrum Access. In Proceedings of 2005 First IEEE International Symposium on the New Frontiers in Dynamic Spectrum Access Networks (DySPAN 2005), Baltimore, MA, USA, 8–11 November 2005; pp. 224–232.
- Yang, L.; Cao, L.; Zheng, H. Proactive channel access in dynamic spectrum networks. Phys. Commun. 2008, 1, 103–111. [Google Scholar] [CrossRef]
- Zhao, Q.; Geirhofer, S.; Tong, L.; Sadler, B.M. Optimal Dynamic Spectrum Access via Periodic Channel Sensing. In Proceedings of the IEEE Wireless Communications and Networking Conference, Hong Kong, China, 11–15 March 2007; pp. 33–37.
- Akyildiz, I.F.; Lee, W.Y.; Chowdhury, K.R. CRAHNs: Cognitive radio ad hoc networks. Ad Hoc Netw. 2009, 7, 810–836. [Google Scholar] [CrossRef]
- Lee, W.Y.; Akyildiz, I. Optimal spectrum sensing framework for cognitive radio networks. IEEE Trans. Wirel. Commun. 2008, 7, 3845–3857. [Google Scholar]
- Kim, H.; Shin, K. Efficient discovery of spectrum opportunities with MAC-layer sensing in cognitive radio networks. IEEE Trans. Mob. Comput. 2008, 7, 533–545. [Google Scholar]
- Liang, Y.; Zeng, Y.; Peh, E.C.Y.; Hoang, A.T. Sensing-throughput tradeoff for cognitive radio networks. IEEE Trans. Wirel. Commun. 2008, 7, 1326–1337. [Google Scholar] [CrossRef]
- Peh, E.C.Y.; Liang, Y.C.; Guan, Y.L. Optimization of Cooperative Sensing in Cognitive Radio Networks: A Sensing-Throughput Tradeoff View. In Proceedings of the 2009 IEEE International Conference on Communications, Dresden, Germany, 14–18 June 2009; pp. 3521–3525.
- Hamid, M.; Björsell, N. A Novel Approach for Energy Detector Sensing Time and Periodic Sensing Interval Optimization in Cognitive Radios. In Proceedings of the 4th International Conference on Cognitive Radio and Advanced Spectrum Management, Barcelona, Spain, 26–29 October, 2011; pp. 58:1–58:7.
- Watteyne, T.; Mehta, A.; Pister, K. Reliability through Frequency Diversity: Why Channel Hopping Makes Sense. In Proceedings of the 6th ACM International Symposium on Performance Evaluation of Wireless Ad Hoc, Sensor, and Ubiquitous Networks PE-WASUN, Tenerife, Spain, 26–30 October, 2009; pp. 116–123.
- Sendonaris, A.; Erkip, E.; Aazhang, B. User cooperation diversity-part I: System description. IEEE Trans. Commun. 2003, 51, 1927–1938. [Google Scholar] [CrossRef]
- Ganesan, G.; Li, Y. Agility Improvement through Cooperative Diversity in Cognitive Radio. In Proceedings of the IEEE 2005 Global Telecommunications Conference, St. Louis, MO, USA, 28 November–2 December 2005; pp. 2505–2509.
- Mishra, S.M.; Sahai, A.; Brodersen, R.W. Cooperative Sensing among Cognitive Radios. In Proceedings of the IEEE International Conference on Communications, Istanbul, Turkey, 11–15 June 2006; pp. 1658–1663.
- Quan, Z.; Cui, S.; Sayed, A.H. Optimal linear cooperation for spectrum sensing in cognitive radio networks. IEEE J. Sel. Top. Signal Process. 2008, 2, 28–40. [Google Scholar] [CrossRef]
- Sharma, V.; Jayaprakasam, A. An efficient algorithm for cooperative spectrum sensing in cognitive radio networks. Change 2008, 5, 6. [Google Scholar]
- Gao, F.; Yuan, W.; Liu, W.; Cheng, W.; Wang, S. Pipelined Cooperative Spectrum Sensing in Cognitive Radio Networks. In Proceedings of the 2009 IEEE Conference Wireless Communicaiton & Networking, Budapest, Hungary, 5–8 April 2009; pp. 588–592.
- Fan, R.; Jiang, H. Optimal multi-channel cooperative sensing in cognitive radio networks. Trans. Wirel. Commun. 2010, 9, 1128–1138. [Google Scholar] [CrossRef]
- Yue, W.; Zheng, B.; Cui, J.; Tang, S.; Wang, L. Improved Cooperative Spectrum Sensing for Cognitive Radio under Bandwidth Constraints. In Proceedings of the International Conference on Wireless Communications and Mobile Computing, Caen, France, 28 June–2 July 2010; pp. 843–847.
- Zhao, Y.; Song, M.; Xin, C. A weighted cooperative spectrum sensing framework for infrastructure-based cognitive radio networks. Comput. Commun. 2011, 34, 1510–1517. [Google Scholar] [CrossRef]
- Khaleel, H.; Penna, F.; Pastrone, C.; Tomasi, R.; Spirito, M. Distributed Spectrum Sensing and Channel Selection in Opportunistic Wireless Personal Area Networks. In Proceedings of the 2nd International Workshop on Mobile Opportunistic Networking, Pisa, Italy, 22–23 February 2010; pp. 185–187.
- Ngatched, T.M.N.; Alfa, A.S.; Cai, J. Cooperative Sensing with Transmit Diversity Based on Randomized STBC in CR Networks. In Proceedings of the 6th International Wireless Communications and Mobile Computing Conference, Caen, France, 28 June–2 July 2010; pp. 225–230.
- Vlajic, N.; Xia, D. Wireless Sensor Networks: To Cluster or not to Cluster? In Proceedings of International Symposium on the World of Wireless, Mobile and Multimedia Networks (WoWMoM 2006), Buffalo, NY, USA, 26–29 June 2006; pp. 9–268.
- Sim, I.; Choi, K.; Kwon, K.; Lee, J. Energy Efficient Cluster Header Selection Algorithm in WSN. In Proceedings of International Conference on the Complex, Intelligent and Software Intensive Systems (CISIS ’09), Burgos, Spain, 23–26 September 2009; pp. 584–587.
- Diallo, C.; Marot, M.; Becker, M. Single-node Cluster Reduction in WSN and Energy-Efficiency during Cluster Formation. In Proceedings of the 9th IFIP Annual Mediterranean the Ad Hoc Networking Workshop (Med-Hoc-Net), Juan-les-pins, France, 23–25 June 2010; pp. 1–10.
- Guo, L.; Chen, F.; Dai, Z.; Liu, Z. WSN Cluster Head Selection Algorithm Based on Neural Network. In Proceedings of International Conference on the Machine Vision and Human-Machine Interface (MVHI), Kaifeng, China, 24–25 April 2010; pp. 258–260.
- Abusaimeh, H.; Yang, S.H. Energy-Aware Optimization of the Number of Clusters and Cluster-Heads in WSN. In Proceedings of 2012 International Conference on the Innovations in Information Technology (IIT), Al Ain, UAE, 18–20 March 2012; pp. 178–183.
- Hosseinirad, S.M.; Basu, S. Article: Imperialist approach to cluster head selection in WSN. Int. J. Comput. Appl. 2012, wcmn, 1–5. [Google Scholar]
- Baker, D.; Ephremides, A. The architectural organization of a mobile radio network via a distributed algorithm. IEEE Trans Commun. 1981, 29, 1694–1701. [Google Scholar] [CrossRef]
- Chatterjee, M.; Das, S.K.; Turgut, D. WCA: A weighted clustering algorithm for mobile ad hoc networks. Cluster Comput. 2002, 5, 193–204. [Google Scholar] [CrossRef]
- Gerla, M.; Chieh Tsai, J.T. Multicluster, mobile, multimedia radio network. J. Wirel. Netw. 1995, 1, 255–265. [Google Scholar] [CrossRef]
- Parekh, A. Selecting Routers in Ad Hoc Networks. In Proceedings SBT/IEEE International Telecommunications Symposium, Rio de Janeiro, Brazil, August 1994.
- Chiasserini, C.F.; Chlamtac, I.; Monti, P.; Nucci, A. Energy Efficient Design of Wireless Ad Hoc Networks. In Proceedings of the Second International IFIP-TC6 Networking Conference on Networking Technologies, Services, and Protocols; Performance of Computer and Communication Networks; and Mobile and Wireless Communications, Florence, Italy, 25–28 February, 2002; pp. 376–386.
- Chen, T.; Zhang, H.; Maggio, G.M.; Chlamtac, I. Topology Management in CogMesh: A Cluster-based Cognitive Radio Mesh Network. In Proceedings of IEEE International Conference on the Communications (ICC ’07), Glasgow, UK, 24–28 June 2007.
- Thoppian, M.; Venkatesan, S.; Prakash, R.; Chandrasekaran, R. MAC-Layer Scheduling in Cognitive Radio based Multi-Hop Wireless Networks. In Proceedings of the 2006 International Symposium on on World of Wireless, Mobile and Multimedia Networks, Buffalo, NY, USA, 26–29 June 2006; pp. 191–202.
- Cormio, C.; Chowdhury, K.R. A survey on MAC protocols for cognitive radio networks. Ad Hoc Netw. 2009, 7, 1315–1329. [Google Scholar] [CrossRef]
- Pister, K.S.J.; Doherty, L. TSMP: Time Synchronized Mesh Protocol. In Proceedings of the Parallel and Distributed Computing Systems, Orlando, FL, USA, 16–18 November 2008.
- Khaleel, H.; Pastrone, C.; Penna, F.; Spirito, M.; Garello, R. Impact of Wi-Fi Traffic on the IEEE 802.15.4 Channels Occupation in Indoor Environments. In Proceedings of the International Conference Electromagnetics in Advanced Applications, Torino, Italy, 14–18 September 2009; pp. 1042–1045.
- Du, P.; Roussos, G. Adaptive Time Slotted Channel Hopping for Wireless Sensor Networks. In Proceedings of 2012 4th Computer Science and Electronic Engineering Conference (CEEC), Colchester, UK, 12–13 September 2012; pp. 29–34.
- Da Silva, C.; Choi, B.; Kim, K. Distributed Spectrum Sensing for Cognitive Radio Systems. In Proceedings of the Information Theory and Applications Workshop, San Diego, CA, USA, 29 January–2 February 2007; pp. 120–123.
- Ghasemi, A.; Sousa, E.S. Collaborative Spectrum Sensing for Opportunistic Access in Fading Environments. In Proceedings of the First IEEE International Symposium on New Frontiers in Dynamic Spectrum Access Networks (DySPAN 2005), Baltimore, MA, USA, 8–11 November 2005; pp. 131–136.
- Zhou, X.; Ma, J.; Li, G.; Kwon, Y.H.; Soong, A. Probability-Based Combination for Cooperative Spectrum Sensing in Cognitive Radio Networks. In Proceedings of IEEE International Conference on the Communications (ICC ’09), Dresden, Germany, 14–18 June 2009; pp. 1–5.
- Pratas, N.; Marchetti, N.; Rodrigues, A.; Prasad, R. Capacity Limits Introduced by Data Fusion on Cooperative Spectrum Sensing under Correlated Environments. In Proceedings of the 2010 8th International Conference on Communications (COMM), Bucharest, Romania, 10–12 June 2010.
- Ma, J.; Zhao, G.; Li, Y. Soft combination and detection for cooperative spectrum sensing in cognitive radio networks. IEEE Trans. Wirel. Commun. 2008, 7, 4502–4507. [Google Scholar]
- Kyperountas, S.; Correal, N.; Shi, Q. A Comparison of Fusion Rules for Cooperative Spectrum Sensing in Fading Channels. In Proceedings of the Wireless Symposium and Summer School, Blacksburg, VA, USA, 2–4 June 2010.
- Sun, C.; Zhang, W.; Ben, K. Cluster-Based Cooperative Spectrum Sensing in Cognitive Radio Systems. In Proceedings of the IEEE International Conference Communication (ICC ’07), Glasgow, UK, 24–28 June 2007.
- Visotsky, E.; Kuffner, S.; Peterson, R. On Collaborative Detection of TV Transmissions in Support of Dynamic Spectrum Sharing. In Proceedings of 2005 First IEEE International Symposium on the New Frontiers in Dynamic Spectrum Access Networks (DySPAN 2005), Baltimore, MA, USA, 8–11 November 2005; pp. 338–345.
- Zhang, W.; Mallik, R.; Ben Letaief, K. Cooperative Spectrum Sensing Optimization in Cognitive Radio Networks. In Proceedings of IEEE International Conference on the Communications (ICC ’08), Beijing, China, 19–23 May 2008; pp. 3411–3415.
- Min, A.W.; Zhang, X.; Shin, K.G. Spatio-Temporal Fusion for Small-scale Primary Detection in Cognitive Radio Networks. In Proceedings of the 29th IEEE International Conference on Computer Communications INFOCOM, San Diego, CA, USA, 14–19 March 2010.
- Quan, Z.; Cui, S.; Sayed, A. An Optimal Strategy for Cooperative Spectrum Sensing in Cognitive Radio Networks. In Proceedings of the IEEE Global Telecommunications Conference (GLOBECOM ’07), Washington, DC, USA, 26–30 November 2007; pp. 2947–2951.
- Chen, R.; Park, J.M.; Bian, K. Robust Distributed Spectrum Sensing in Cognitive Radio Networks. In Proceedings of the IEEE 27th Conference on Computer Communications (INFOCOM 2008), Phoenix, AZ, USA, 15–17 April 2008; pp. 1876–1884.
- Shen, J.; Liu, S.; Zhang, R.; Liu, Y. Soft versus Hard Cooperative Energy Detection under Low SNR. In Proceedings of the Third International Conference on Communications and Networking in China (ChinaCom 2008), Hangzhou, China, 25–27 August 2008; pp. 128–131.
- Zhu, J.; Xu, Z.; Wang, F.; Huang, B.; Zhang, B. Double Threshold Energy Detection of Cooperative Spectrum Sensing in Cognitive Radio. In Proceedings of the The Third International Conference on Cognitive Radio Oriented Wireless Networks and Communications, Singapore, 15–17 May 2008.
- Wang, W.; Zou, W.; Zhou, Z.; Zhang, H.; Ye, Y. Decision Fusion of Cooperative Spectrum Sensing for Cognitive Radio under Bandwidth Constraints. In Proceedings of the Third International Conference on Convergence and Hybrid Information Technology (ICCIT ’08), Busan, Korea, 11–13 November 2008; Volume 1, pp. 733–736.
- Alemseged, Y.; Sun, C.; Tran, H.N.; Harada, H. Distributed Spectrum Sensing with Two-Stage Detection for Cognitive Radio. In Proceedings of the IEEE 70th Vehicular Technology Conference Fall (VTC 2009-Fall), Anchorage, AK, USA, 20–23 September 2009.
- Agrawal, P.; Patwari, N. Correlated link shadow fading in multi-hop wireless networks. IEEE Trans. Wirel. Commun. 2009, 8, 4024–4036. [Google Scholar] [CrossRef]
- Butterworth, K.; Sowerby, K.; Williamson, A. Correlated shadowing in an in-building propagation environment. Electron. Lett. 1997, 33, 420–422. [Google Scholar] [CrossRef]
- Lo, B.F. A survey of common control channel design in cognitive radio networks. Phys. Commun. 2011, 4, 26–39. [Google Scholar] [CrossRef]
- Bandyopadhyay, S.; Coyle, E.J. An Energy Efficient Hierarchical Clustering Algorithm for Wireless Sensor Networks. In Proceedings of the IEEE Conference on Computer Communications, San Francisco, CA, USA, 30 March–3 April 2003.
- Chen, X.; Bie, Z.-S.; Wu, W.-L. Detection efficiency of cooperative spectrum sensing in cognitive radio network. J. China Univ. Posts Telecommun. 2008, 15, 1–7. [Google Scholar] [CrossRef]
- Bin, S.; Kyung Sup, K. Soft combination schemes for cooperative spectrum sensing in cognitive radio networks. ETRI J. 2009, 31, 263–270. [Google Scholar]
- Lilien, L.; Kamal, Z.H.; Bhuse, V.; Gupta, A. Opportunistic Networks: The Concept and Research. In Proceedings of the NSF International Workshop on Research Challenges in Security and Privacy for Mobile and Wireless Networks (WSPWN 2006), Miami, FL, USA, 15–16 March 2006.
- Bruno, R.; Conti, M.; Passarella, A. Opportunistic Networking Overlays for ICT Services in Crisis Management. In Proceedings of the International Conference on Information Systems for Crisis Response and Management, Washington, DC, USA, 4–7 May 2008.
- Pelusi, L.; Passarella, A.; Conti, M. Opportunistic networking: Data forwarding in disconnected mobile ad hoc networks. IEEE Commun. Mag. 2006, 44, 134–141. [Google Scholar] [CrossRef]
- Biswas, S.; Morris, R. ExOR: Opportunistic Multi-Hop Routing for Wireless Networks. In Proceedings of the 2005 Conference on Applications, Technologies, Architectures, and Protocols for Computer Communications, Philadelphia, PA, USA, 22–26 August 2005; pp. 133–144.
- Cesana, M.; Cuomo, F.; Ekici, E. Routing in cognitive radio networks: Challenges and solutions. Ad Hoc Netw. 2011, 9, 228–248. [Google Scholar] [CrossRef]
- Talay, A.; Altilar, D. ROPCORN: Routing Protocol for Cognitive Radio Ad Hoc Networks. In Proceedings of the International Conference on Ultra Modern Telecommunications Workshops (ICUMT ’09), St.Petersburg, Russia, 12–14 October 2009; pp. 1–6.
- Pefkianakis, I.; Wong, S.H.Y.; Songwu, Lu. SAMER: Spectrum Aware Mesh Routing in Cognitive Radio Networks. In Proceedings of the 3rd IEEE Symposium on New Frontiers in Dynamic Spectrum Access Networks (DySPAN 2008), Chicago, IL, USA, 14–17 October 2008.
- Ding, L.; Melodia, T.; Batalama, S.; Matyjas, J.; Medley, M. Cross-layer routing and dynamic spectrum allocation in cognitive radio ad hoc networks. IEEE Trans. Veh. Technol. 2010, 59, 1969–1979. [Google Scholar] [CrossRef]
- Ma, H.; Zheng, L.; Ma, X.; Luo, Y. Spectrum Aware Routing for Multi-Hop Cognitive Radio Networks with a Single Transceiver. In Proceedings of the 3rd International Conference on Cognitive Radio Oriented Wireless Networks and Communications (CrownCom 2008), Singapore, 15–17 May 2008; pp. 1–6.
- Cacciapuoti, A.S.; Caleffi, M.; Paura, L. Reactive routing for mobile cognitive radio ad hoc networks. Ad Hoc Netw. 2012, 10, 803–815. [Google Scholar] [CrossRef]
- Sampath, A.; Yang, L.; Cao, L.; Zheng, H.; Zhao, B. Invited Paper: High Throughput Spectrum-aware Routing for Cognitive Radio Networks. In Proceedings of the 3rd International ICST Conference on Cognitive Radio Oriented Wireless Networks and Communications, Singapore, 15–17 May 2008.
- Shih, C.F.; Liao, W.; Chao, H.L. Joint routing and spectrum allocation for multi-hop cognitive radio networks with route robustness consideration. IEEE Trans. Wirel. Commun. 2011, 10, 2940–2949. [Google Scholar] [CrossRef]
- Zheng, C.; Liu, R.P.; Yang, X.; Collings, I.; Zhou, Z.; Dutkiewicz, E. Maximum Flow-Segment Based Channel Assignment and Routing in Cognitive Radio Networks. In Proceedings of the 2011 IEEE 73rd Vehicular Technology Conference (VTC Spring), Budapest, Hungary, 15–18 May 2011; pp. 1–6.
- Mulligan, G. The 6LoWPAN Architecture. In Proceedings of the 4th Workshop on Embedded Networked Sensors, Cork, UK, 25–26 June 2007; pp. 78–82.
- Cavalcanti, D.; Agrawal, D.; Cordeiro, C.; Xie, B.; Kumar, A. Issues in integrating cellular networks WLANs, AND MANETs: A futuristic heterogeneous wireless network. IEEE Wirel. Commun. 2005, 12, 30–41. [Google Scholar] [CrossRef]
- Tomasi, R.; Khaleel, H.; Penna, F.; Pastrone, C.; Garello, R.; Spirito, M.A. Frequency Agility in IPv6-Based Wireless Personal Area Networks (6LoWPAN). Lect. Notes Comput. Sci. 2010, 6074, 146–157. [Google Scholar]
- Sarkar, D.; Narayan, H. Transport Layer Protocols for Cognitive Networks. In Proceedings of the INFOCOM IEEE Conference on Computer Communications Workshops, San Diego, CA, USA, 15–19 March 2010; pp. 1–6.
- Chowdhury, K.; Di Felice, M.; Akyildiz, I. TP-CRAHN: A Transport Protocol for Cognitive Radio Ad-Hoc Networks. In Proceedings of the IEEE Conference on Computer Communication (INFOCOM 2009), Rio de Janeiro, Brazil, 19–25 April 2009; pp. 2482–2490.
- Manoj, B.; Rao, R.; Zorzi, M. CogNet: A cognitive complete knowledge network system. IEEE Wirel. Commun. 2008, 15, 81–88. [Google Scholar] [CrossRef]
- Leon, O.; Hernandez-Serrano, J.; Soriano, M. A New Cross-Layer Attack to TCP in Cognitive Radio Networks. In Proceedings of the Second International Workshop on Cross Layer Design (IWCLD ’09), Island of Mallorca, Spain, 11–12 June 2009; pp. 1–5.
- Sundaresan, K.; Anantharaman, V.; Hsieh, H.Y.; Sivakumar, A. ATP: A reliable transport protocol for ad hoc networks. IEEE Trans. Mob. Comput. 2005, 4, 588–603. [Google Scholar] [CrossRef]
- McMahon, A.; Farrell, S. Delay- and disruption-tolerant networking. IEEE Int. Comput. 2009, 13, 82–87. [Google Scholar] [CrossRef]
- McDonald, P.; Geraghty, D.; Humphreys, I.; Farrell, S.; Cahill, V. Sensor Network with Delay Tolerance (SeNDT). In Proceedings of the 16th International Conference on Computer Communications and Networks (ICCCN 2007), Honolulu, HI, USA, 13–16 August 2007; pp. 1333–1338.
- Song, Z.; Cardenas, A.; Masuoka, R. Semantic Middleware for the Internet of Things. In Proceedings of the Internet of Things (IOT), Tokyo, Japan, 20 November–1 December 2010; pp. 1–8.
- Dutta, S.; Maiti, S.; Sengupta, M.; Bandyopadhyay, S. Role of middleware for internet of things: A study. Int. J. Comput. Sci. Eng. Surv. 2011, 2, 94–105. [Google Scholar]
- Chaqfeh, M.; Mohamed, N. Challenges in Middleware Solutions for the Internet of Things. In Proceedings of 2012 International Conference on the Collaboration Technologies and Systems (CTS), Denver, CO, USA, 21–25 May 2012; pp. 21–26.
- Kim, J.E.; Boulos, G.; Yackovich, J.; Barth, T.; Beckel, C.; Mosse, D. Seamless Integration of Heterogeneous Devices and Access Control in Smart Homes. In Proceedings of 2012 8th International Conference on the Intelligent Environments (IE), Guanajuato, Mexico, 26–29 June 2012; pp. 206–213.
- Terziyan, V.; Kaykova, O.; Zhovtobryukh, D. UbiRoad: Semantic Middleware for Context-Aware Smart Road Environments. In Proceedings of 2010 Fifth International Conference on the Internet and Web Applications and Services (ICIW), Barcelona, Spain, 9–15 May 2010; pp. 295–302.
- Srivastava, V.; Motani, M. Cross-Layer Design and Optimization in Wireless Networks. In Cognitive Networks; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2007; pp. 121–146. [Google Scholar]
- Madan, R.; Cui, S.; Lal, S.; Goldsmith, A. Cross-layer design for lifetime maximization in interference-limited wireless sensor networks. IEEE Trans. Wirel. Commun. 2006, 5, 3142–3152. [Google Scholar] [CrossRef]
- Wang, C.; Li, B.; Sohraby, K.; Daneshmand, M.; Hu, Y. Upstream congestion control in wireless sensor networks through cross-layer optimization. IEEE J. Sel. Areas Commun. 2007, 25, 786–795. [Google Scholar] [CrossRef]
- Lin, X.; Shroff, N.; Srikant, R. A tutorial on cross-layer optimization in wireless networks. IEEE J. Sel. Areas Commun. 2006, 24, 1452–1463. [Google Scholar]
- Melodia, T.; Vuran, M.; Pompili, D. The State of the Art in Cross-Layer Design for Wireless Sensor Networks. Lect. Notes Comput. Sci. 2006, 3883, 78–92. [Google Scholar]
- Akyildiz, I.; Vuran, M.; Akan, O. A Cross-Layer Protocol for Wireless Sensor Networks. In Proceedings of the 2006 40th Annual Conference on Information Sciences and Systems, Princeton, NJ, USA, 22–24 March 2006; pp. 1102–1107.
- Jacobson, V.; Smetters, D.K.; Thornton, J.D.; Plass, M.F.; Briggs, N.H.; Braynard, R.L. Networking Named Content. In Proceedings of the 5th International Conference on Emerging Networking Experiments and Technologies, Rome, Italy, 1–4 December 2009; pp. 1–12.
- Helgason, O.R.; Yavuz, E.A.; Kouyoumdjieva, S.T.; Pajevic, L.; Karlsson, G. A Mobile Peer-to-Peer System for Opportunistic Content-Centric Networking. In Proceedings of the Second ACM SIGCOMM Workshop on Networking, Systems, and Applications on Mobile Handhelds, New Delhi, India, 30 August–3 September; pp. 21–26.
© 2013 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Du, P.; Roussos, G. Adaptive Communication Techniques for the Internet of Things. J. Sens. Actuator Netw. 2013, 2, 122-155. https://doi.org/10.3390/jsan2010122
Du P, Roussos G. Adaptive Communication Techniques for the Internet of Things. Journal of Sensor and Actuator Networks. 2013; 2(1):122-155. https://doi.org/10.3390/jsan2010122
Chicago/Turabian StyleDu, Peng, and George Roussos. 2013. "Adaptive Communication Techniques for the Internet of Things" Journal of Sensor and Actuator Networks 2, no. 1: 122-155. https://doi.org/10.3390/jsan2010122
APA StyleDu, P., & Roussos, G. (2013). Adaptive Communication Techniques for the Internet of Things. Journal of Sensor and Actuator Networks, 2(1), 122-155. https://doi.org/10.3390/jsan2010122