Habitat Mapping and Change Assessment of Coastal Environments: An Examination of WorldView-2, QuickBird, and IKONOS Satellite Imagery and Airborne LiDAR for Mapping Barrier Island Habitats



Abstract
:
1. Introduction
1.1. Barrier Island Geomorphology
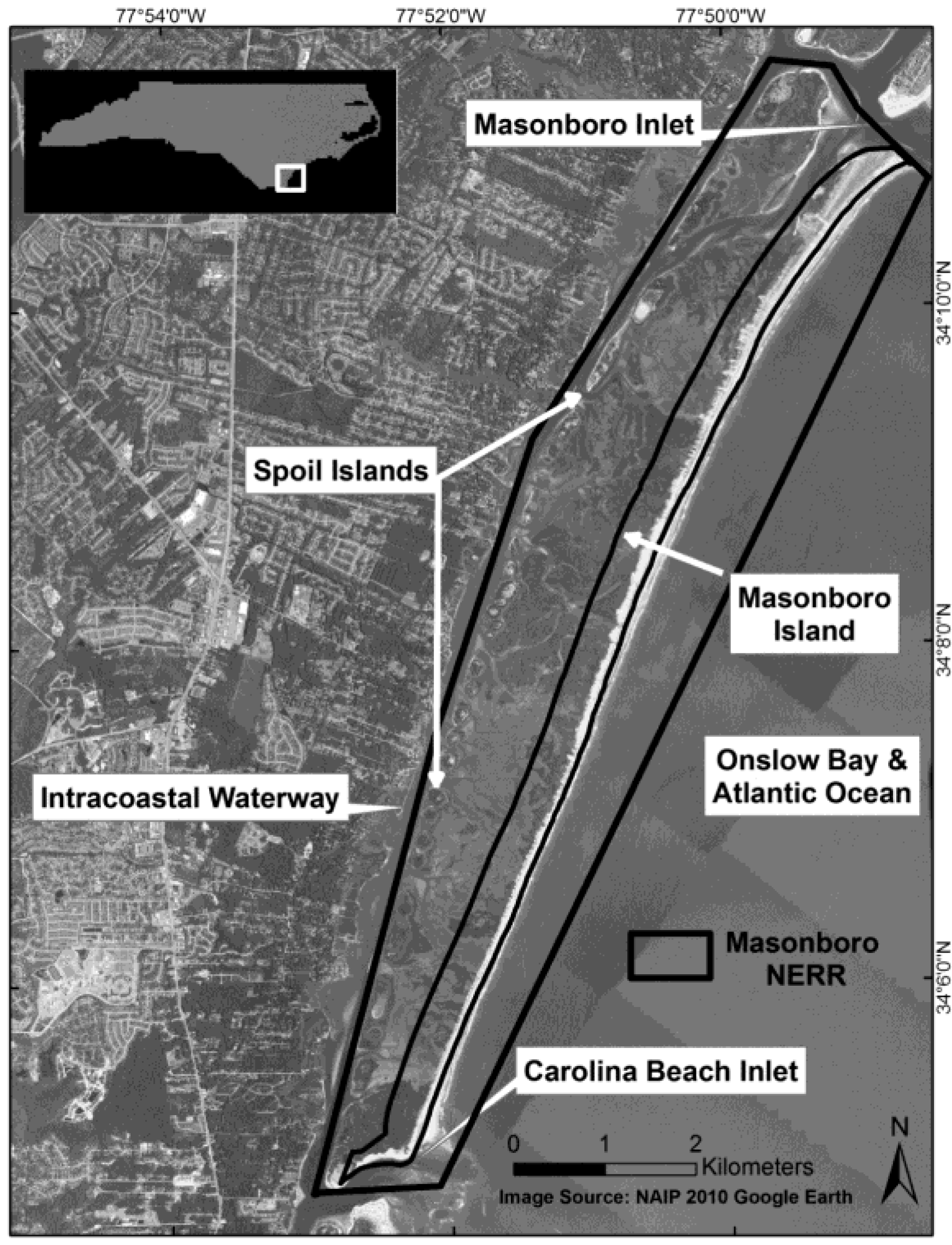
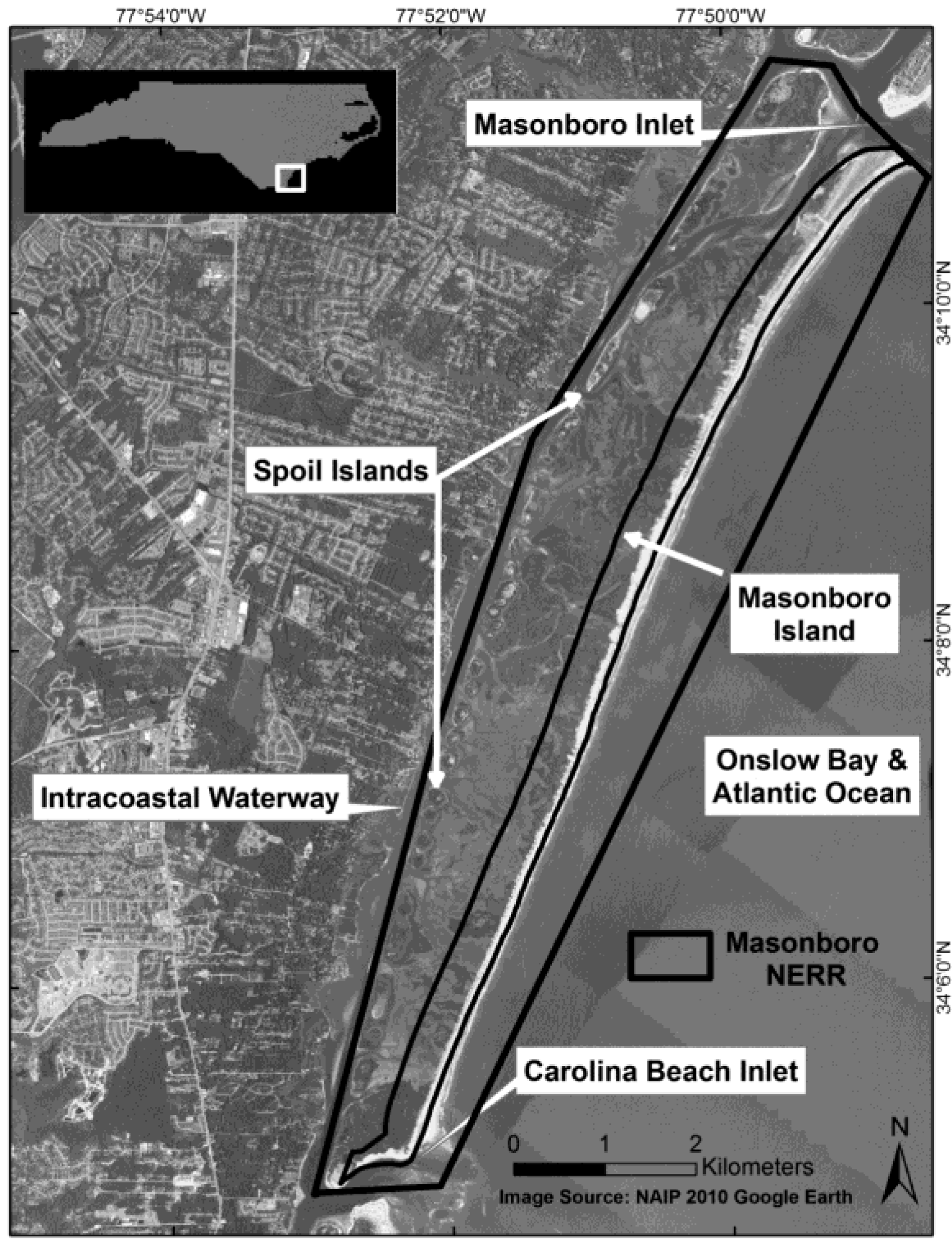
1.2. Study Area
1.3. Coastal Remote Sensing
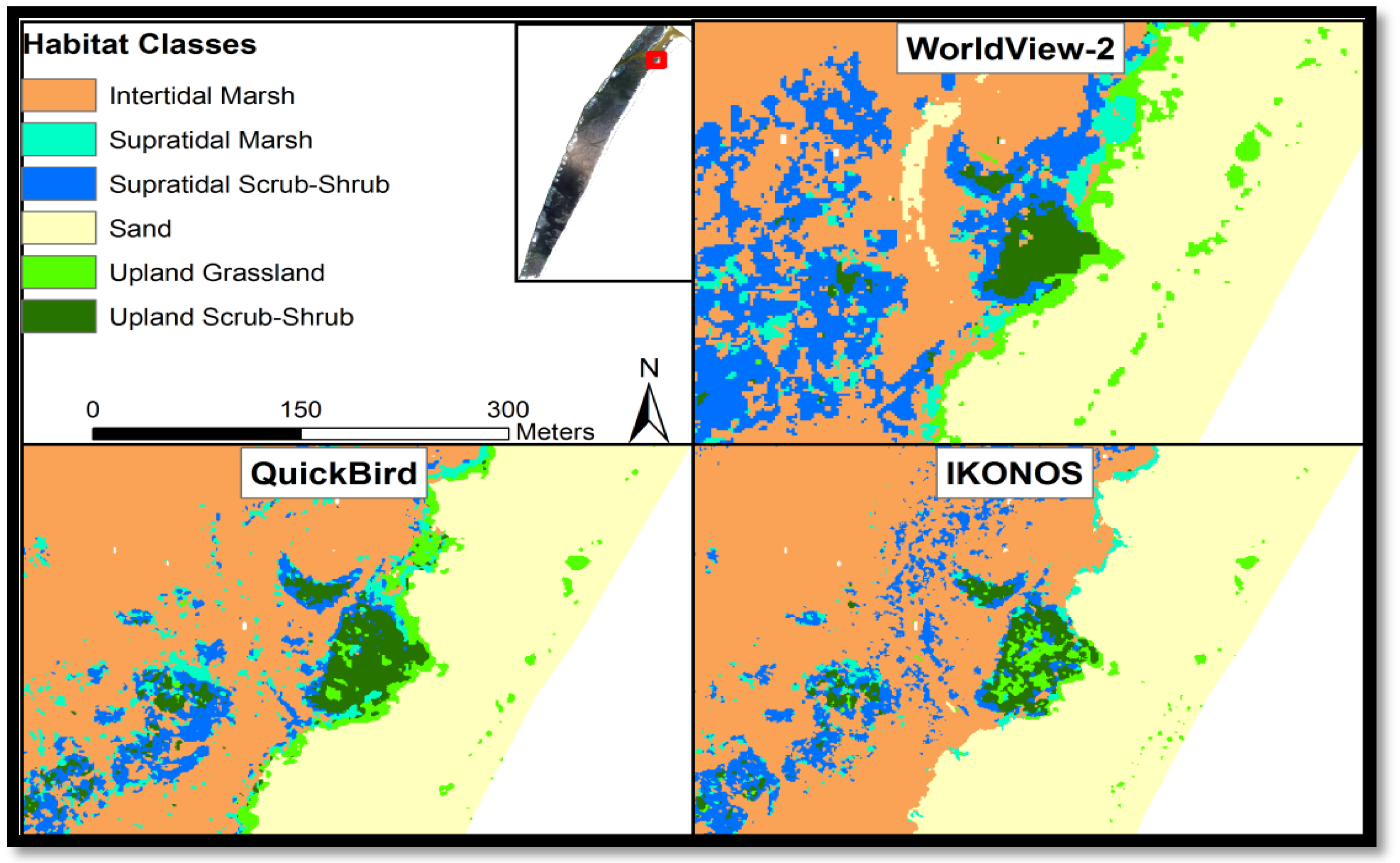
1.4. WorldView-2 Satellite Imagery
1.5. QuickBird and IKONOS Satellite Imagery

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
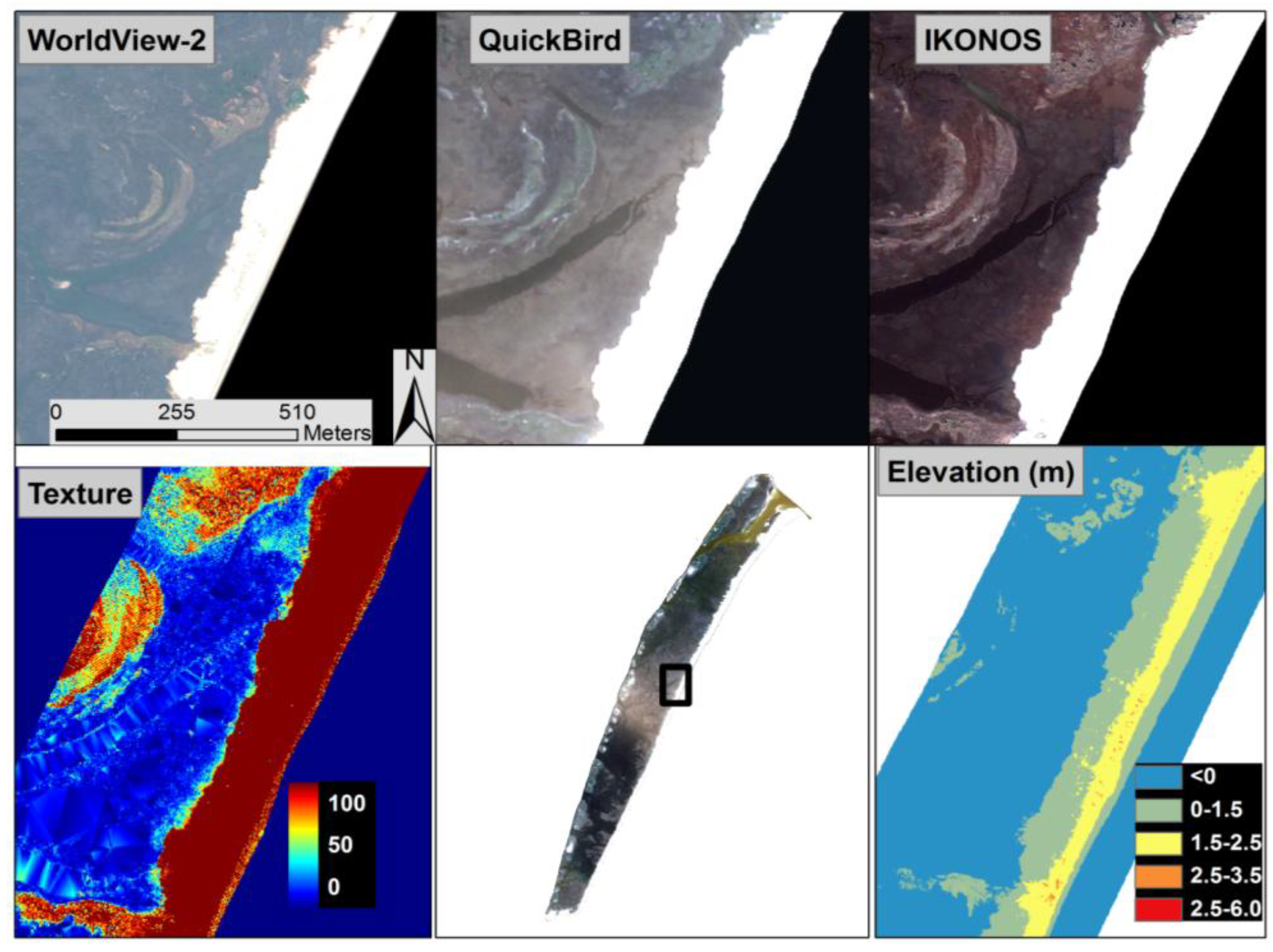
| Satellite Sensor | Bands | Spatial Resolution (m) | Radiometric Resolution | Band Widths (nm) | Time & Date Collected | Tidal Height * |
|---|---|---|---|---|---|---|
| WorldView-2 | 8 MS + Panchromatic | 1.8 MS 0.5 Pan | 16 bit | 1: 400–450 2: 450–510 3: 510–580 4: 585–625 5: 630–690 6: 705–745 7: 770–895 8: 860–1040 Pan: 450–800 | 16:11 15 Sept. 2010 16:21 16 Oct. 2010 | 1.06 m 1.18 m |
| IKONOS | 3 MS (No NIR band) | 1.0 Pan | 8 bit | 1: 450–520 2: 510–600 3: 630–700 | 16:08 13 Oct. 2002 16:20 23 Dec. 2002 | 0.91 m 1.22 m |
| QuickBird | 4 MS + Panchromatic | 2.4 MS 0.61 Pan | 11 bit | 1: 420–520 2: 520–600 3: 630–690 4: 760–890 Pan: 450–900 | 15:51 16 Apr. 2002 | 1.10 m |
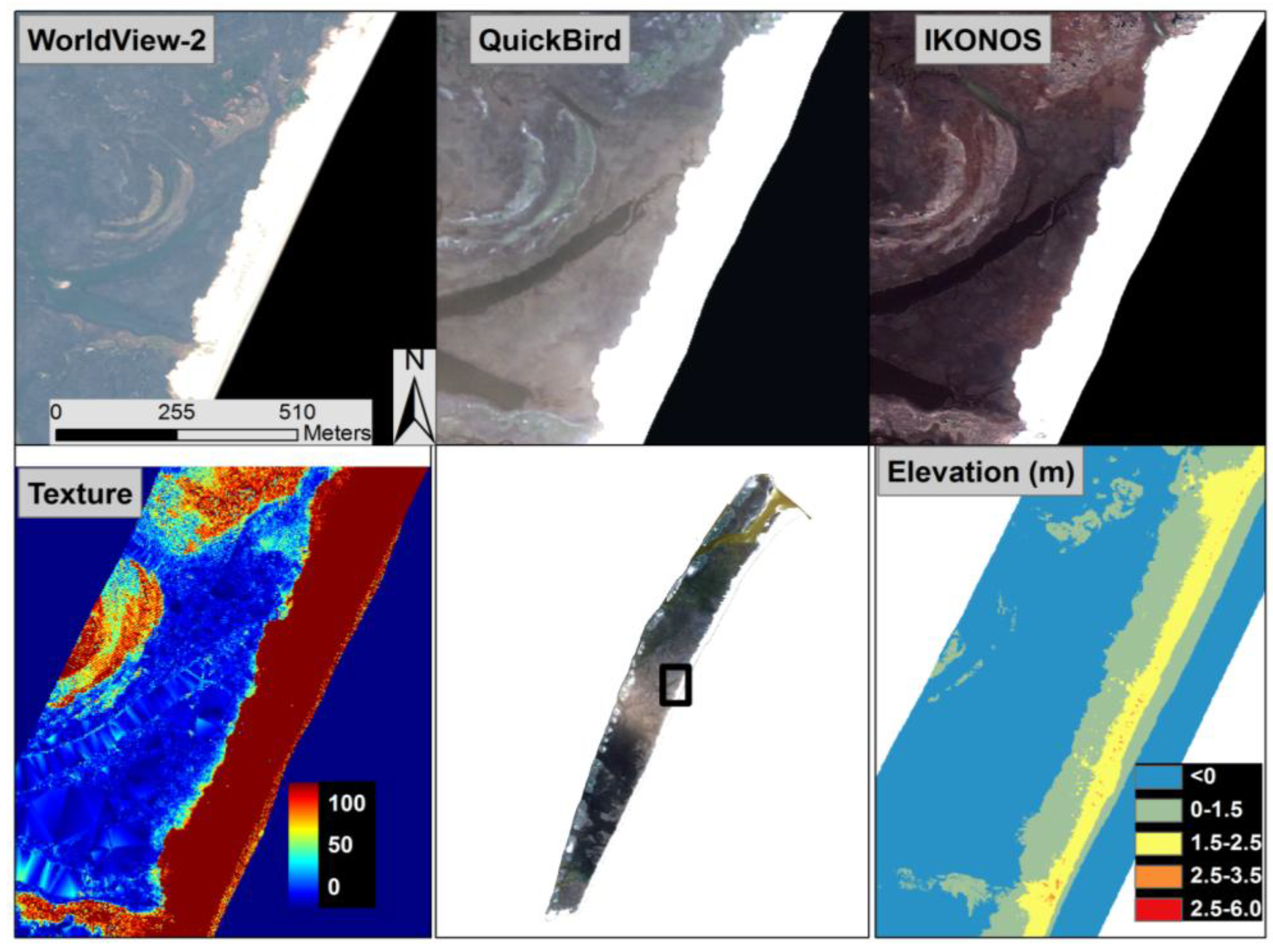
1.6. Light Detection and Ranging (LiDAR) Data
1.7. Project Significance and Objectives
- The new WV-2 sensor will produce more accurate maps in comparison to QB and IK.
- Supervised classification will produce more accurate maps in comparison with unsupervised.
- LiDAR elevation and texture data will increase the map accuracy.
2. Methodology
2.1. Pre-Processing
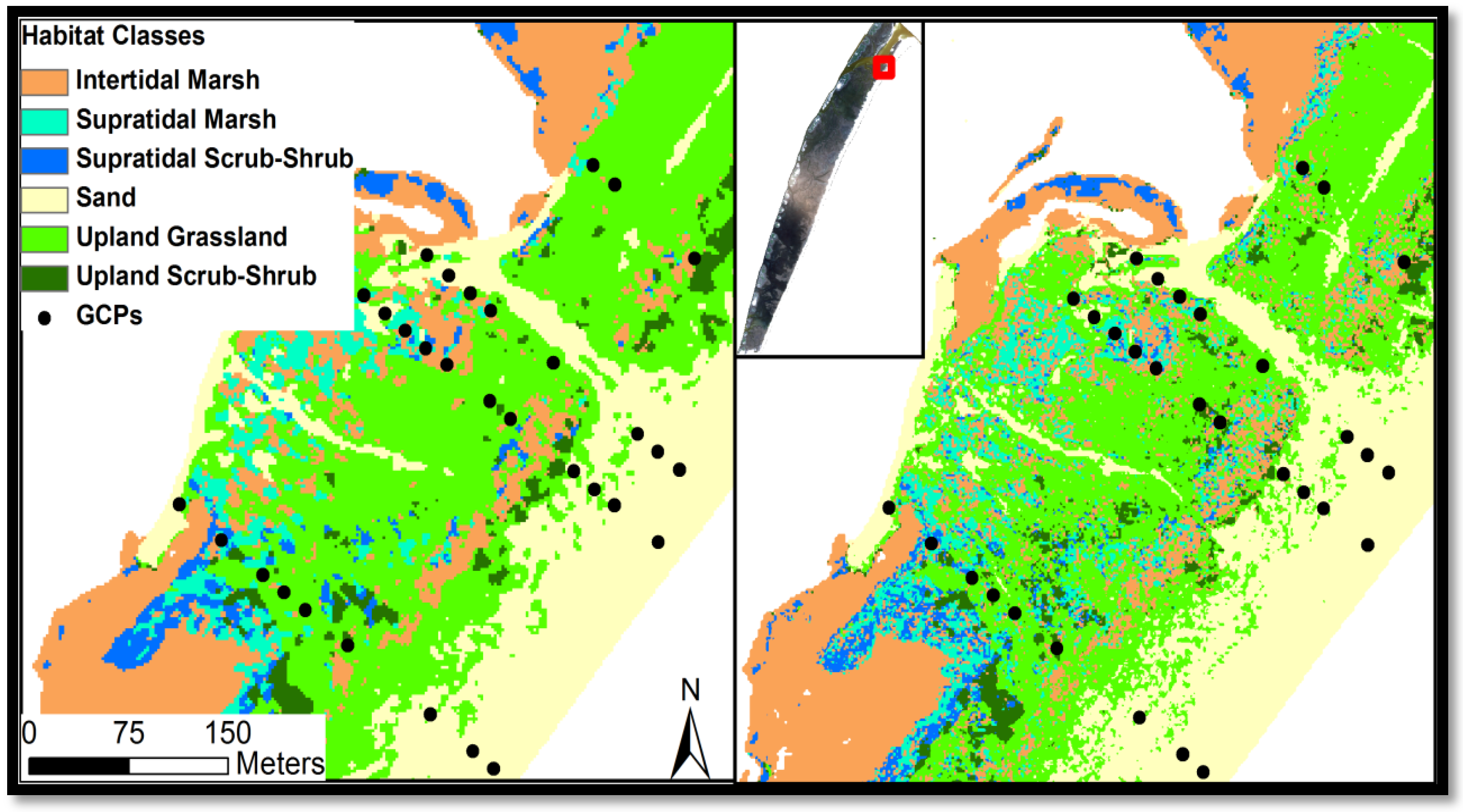
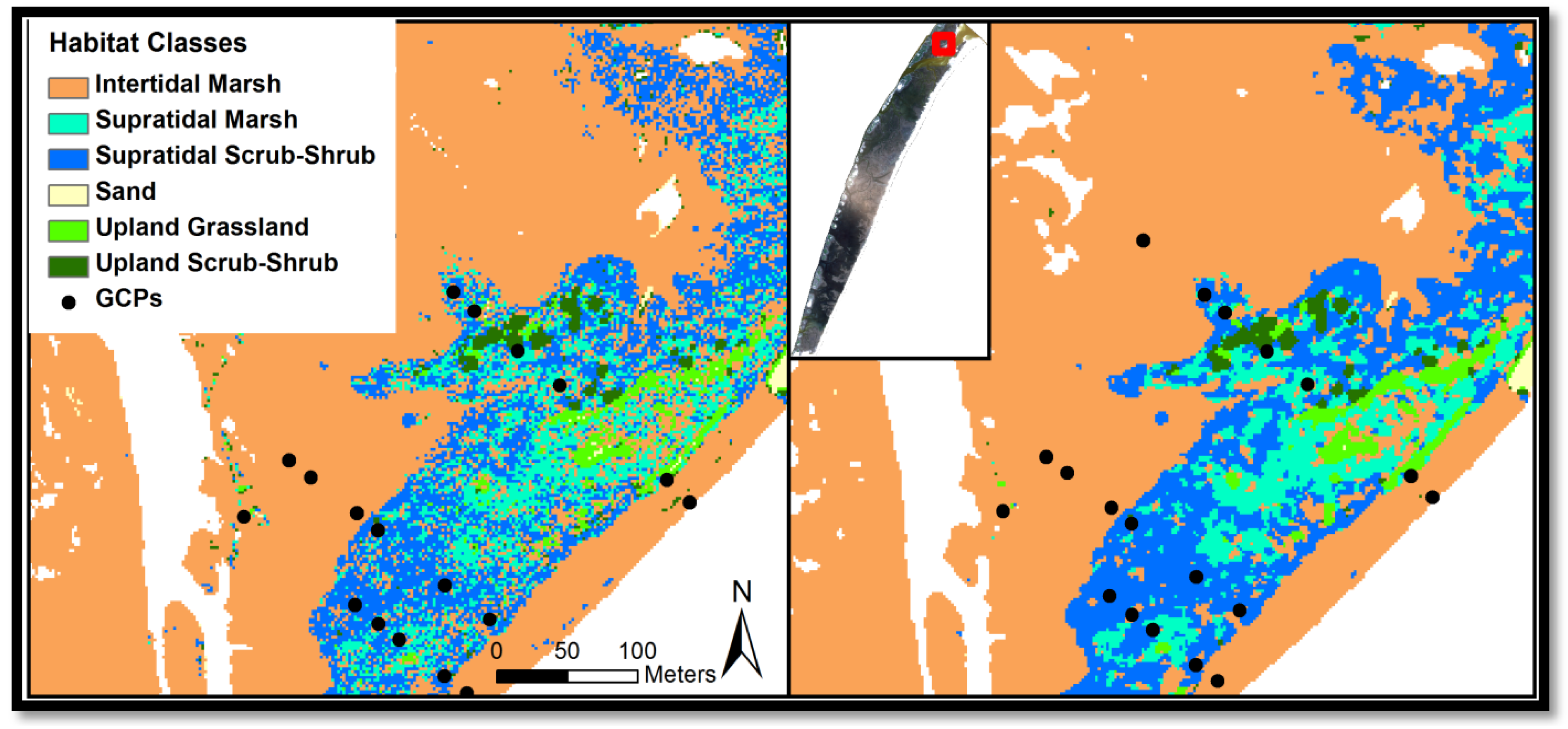
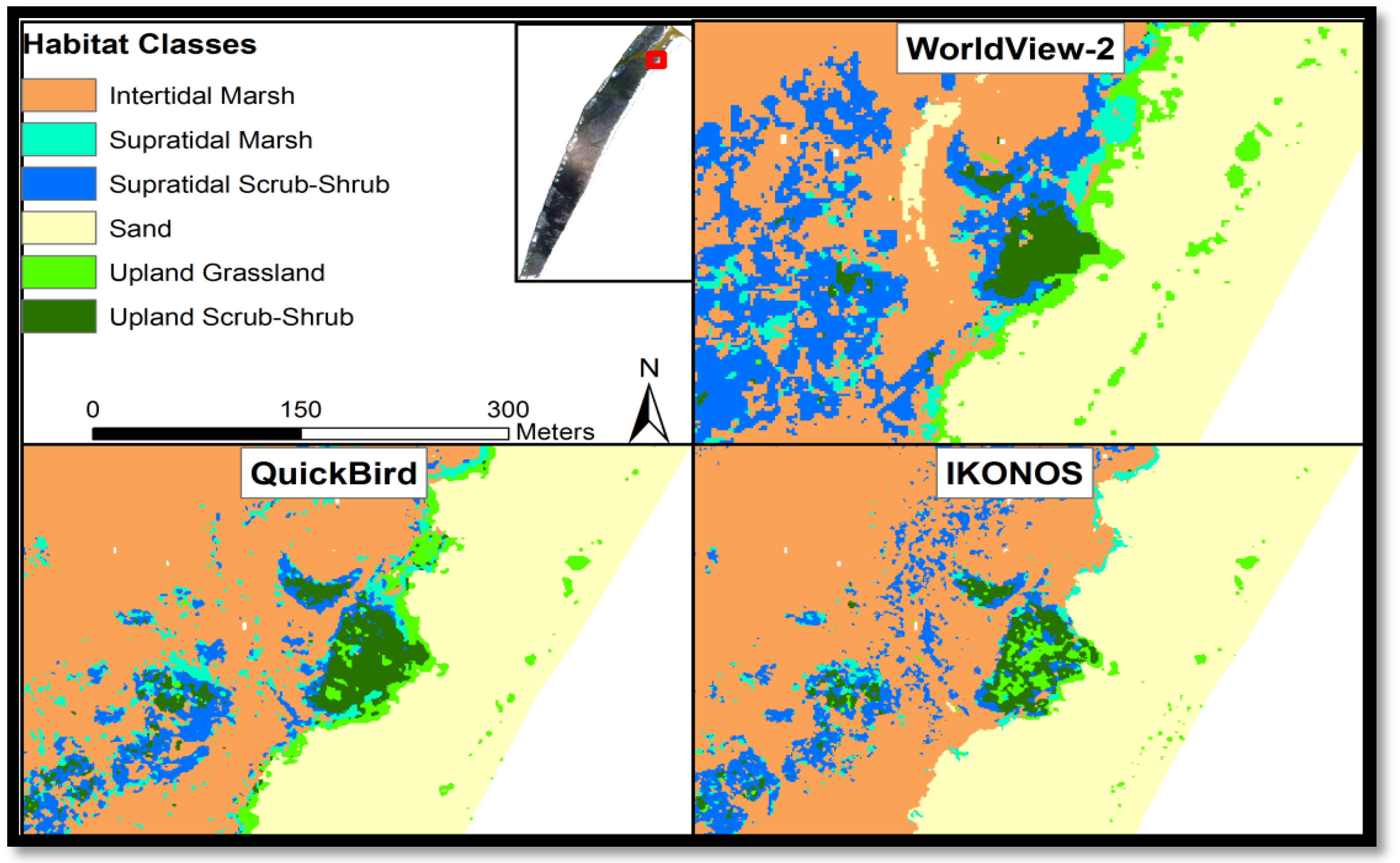
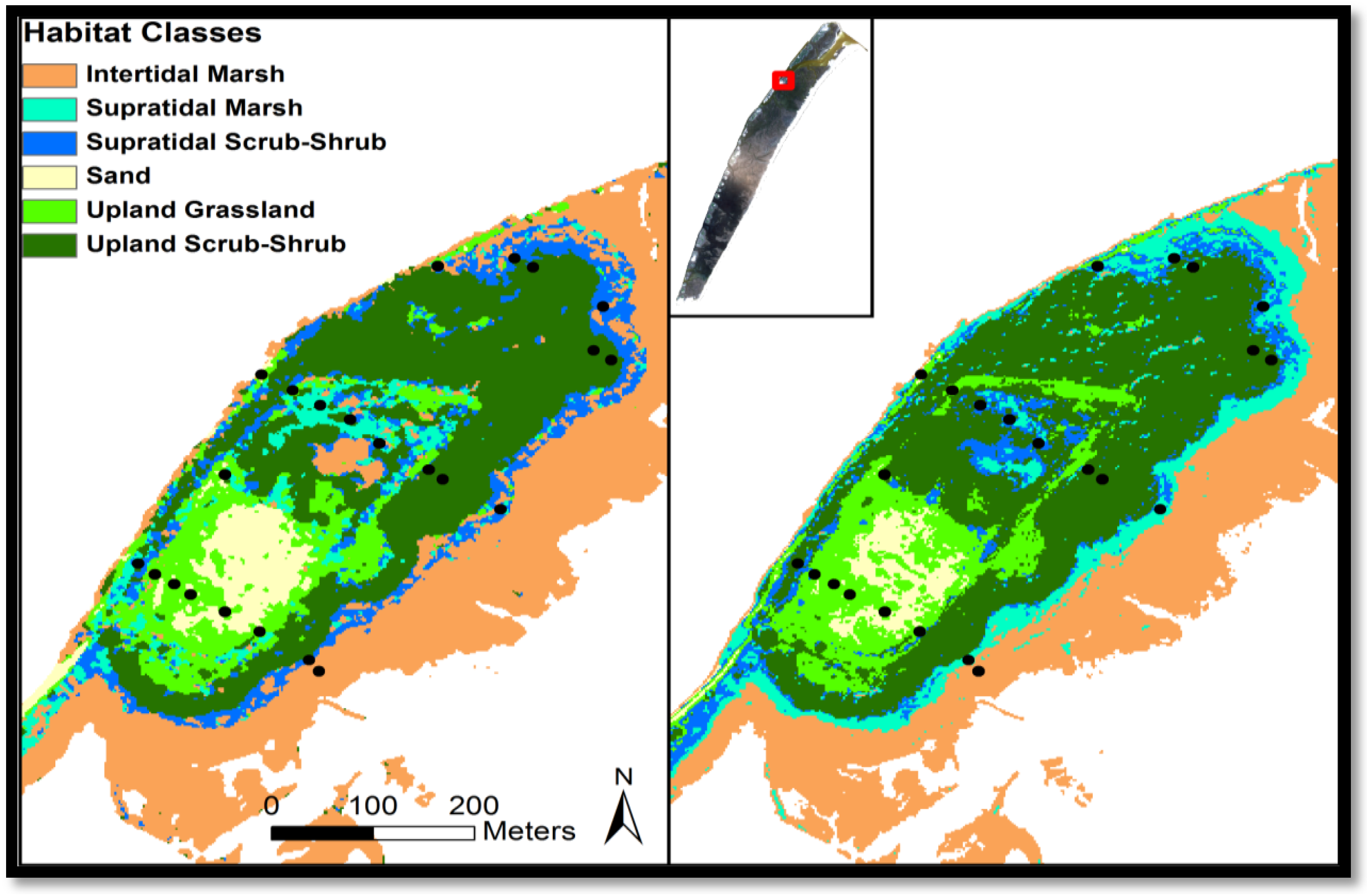
2.2. Habitat Mapping Classification Scheme
2.3. Satellite Image Classification Techniques

| Name | # Points 2002/2010 (Total: 650/659) | Dominant Species |
|---|---|---|
| Intertidal Emergent Wetland | 149/150 | Spartina alterniflora (smooth cordgrass) |
| Intertidal Scrub-Shrub Wetland | 47/48 | Borrichia frutescens (sea ox-eye) |
| Supratidal Emergent Wetland | 40/40 | Spartina patens (salt meadow hay); Distichlis spicata (inland saltgrass); Juncus roemarianus (black needle rush) |
| Supratidal Scrub-Shrub Wetland | 63/63 | Borrichia frutescens; Spartina patens; Uniola paniculata (sea oats); Distichlis spicata |
| Upland Grass | 132/140 | Spartina patens; Uniola paniculata; Distichlis spicata; Panicum spp. |
| Upland Scrub-Shrub (Mixed) | 67/70 | Iva frutescens (marsh elder); Baccharis halimfolia (groundsel tree); Ilex vomitoria (yaupon); Myrica cerifera; Quercus laurifolia (laurel oak); Juniperus virginiana (eastern red cedar) |
| Upland Forest | 31/31 | Quercus virginiana (live oak); Ilex vomitoria; Myrica cerifera; Quercus laurifolia; Pinus taeda (loblolly pine); Pinus palustris (longleaf pine) |
| Marine and Estuarine Unconsolidated Bottom and Sand | 121/117 | N/A |
2.4. Accuracy Assessment
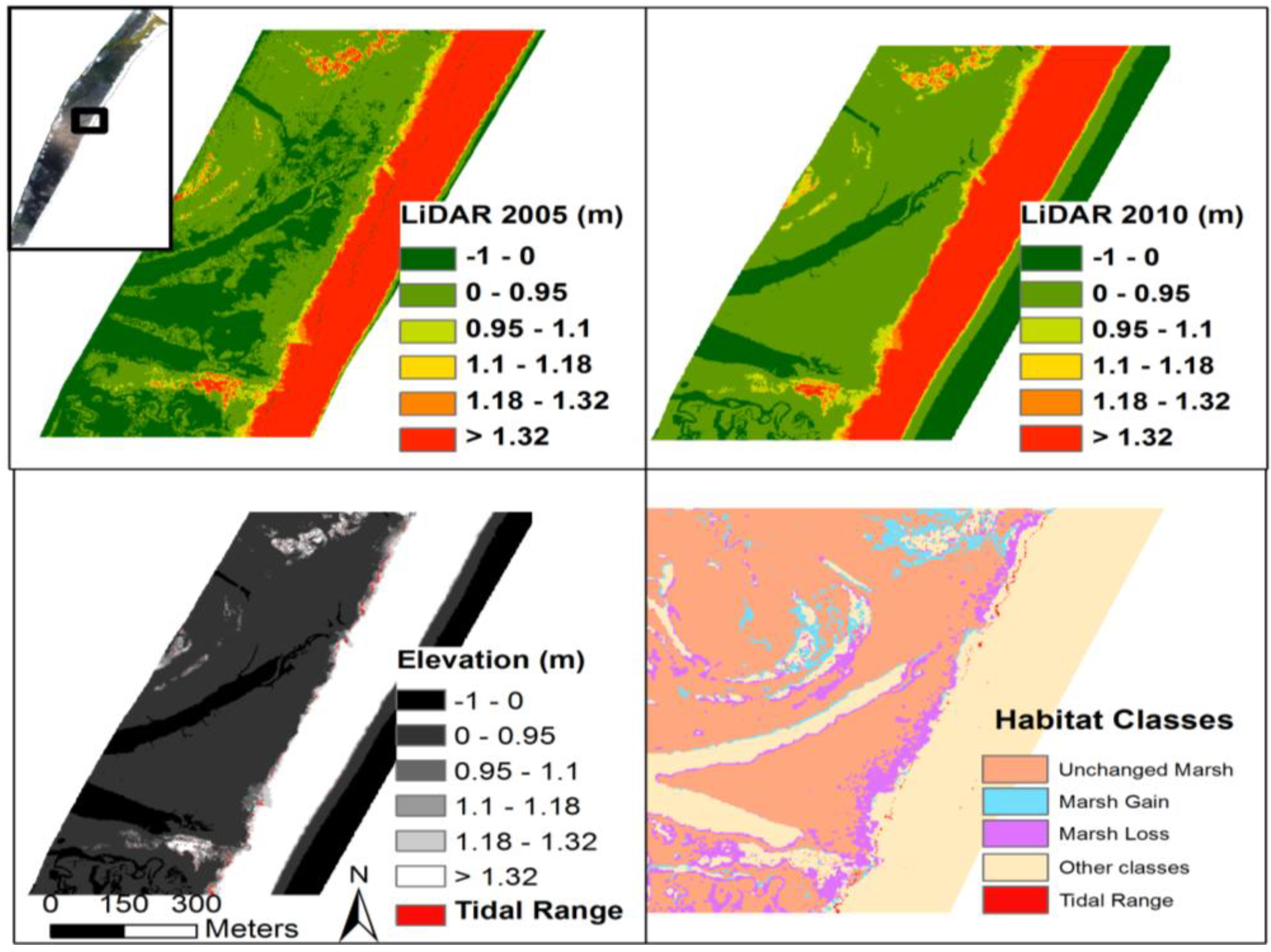
2.5. Habitat Change Detection
3. Results
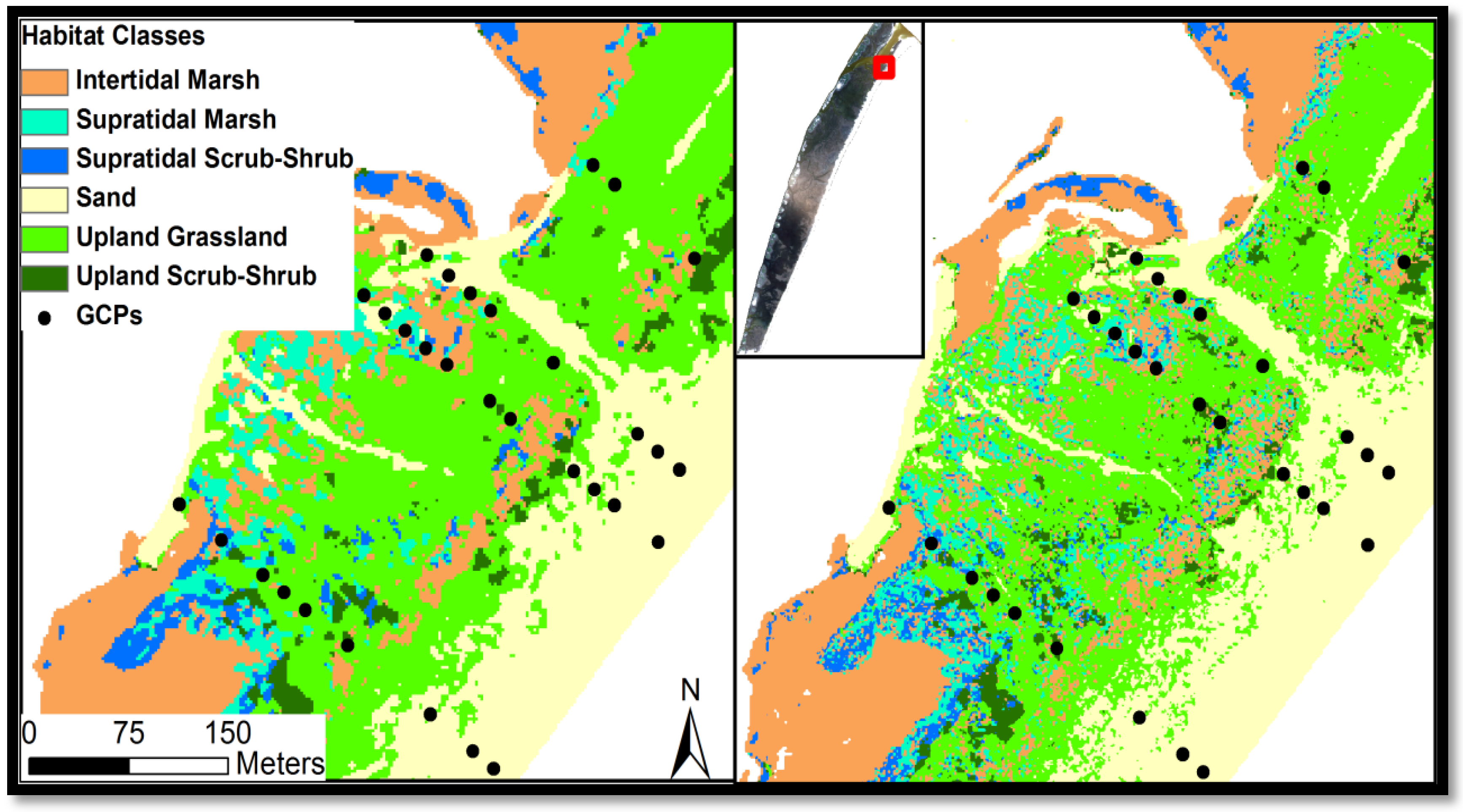
3.1. Masonboro NERRS Study Area
| Sharpen | BandCombinations | UNSUPERVISED | Kappa | Majority Filter | Kappa | SUPERVISED | Kappa | Majority Filter |
|---|---|---|---|---|---|---|---|---|
| No | NIR, G, B | 63.32 | 0.554 | 64.71 | 0.5721 | 69.21 | 0.62 | 71.34 |
| All 8 | 64.01 | 0.568 | 64.01 | 0.5676 | 66.77 | 0.59 | 72.56 | |
| Pan | NIR, G, B | 60.9 | 0.521 | 62.28 | 0.5388 | 59.15 | 0.508 | 60.06 |
| All 8 | 62.63 | 0.548 | 64.01 | 0.566 | 65.24 | 0.573 | 65.85 | |
| No | Red Edge, yellow, coast | 58.48 | 0.497 | 59.17 | 0.5046 | 70.43 | 0.635 | 71.95 |
| Pan | Red Edge, yellow, coast | 63.67 | 0.556 | 63.67 | 0.5567 | 59.45 | 0.511 | 59.76 |
| Non | NIR, G, B | 57.04 | 0.485 | 58.8 | 0.5028 | 57.14 | 0.471 | 60.25 |
| All 4 | 58.1 | 0.496 | 55.99 | 0.4716 | 62.11 | 0.531 | 61.8 | |
| Pan | NIR, G, B | 57.75 | 0.487 | 57.75 | 0.4862 | 60.87 | 0.512 | 61.8 |
| All 4 | 60.92 | 0.525 | 62.32 | 0.5405 | 59.63 | 0.502 | 60.25 | |
| Pan | R, G, B | 40.49 | 0.257 | 41.55 | 0.2679 | 40.99 | 0.277 | 41.3 |
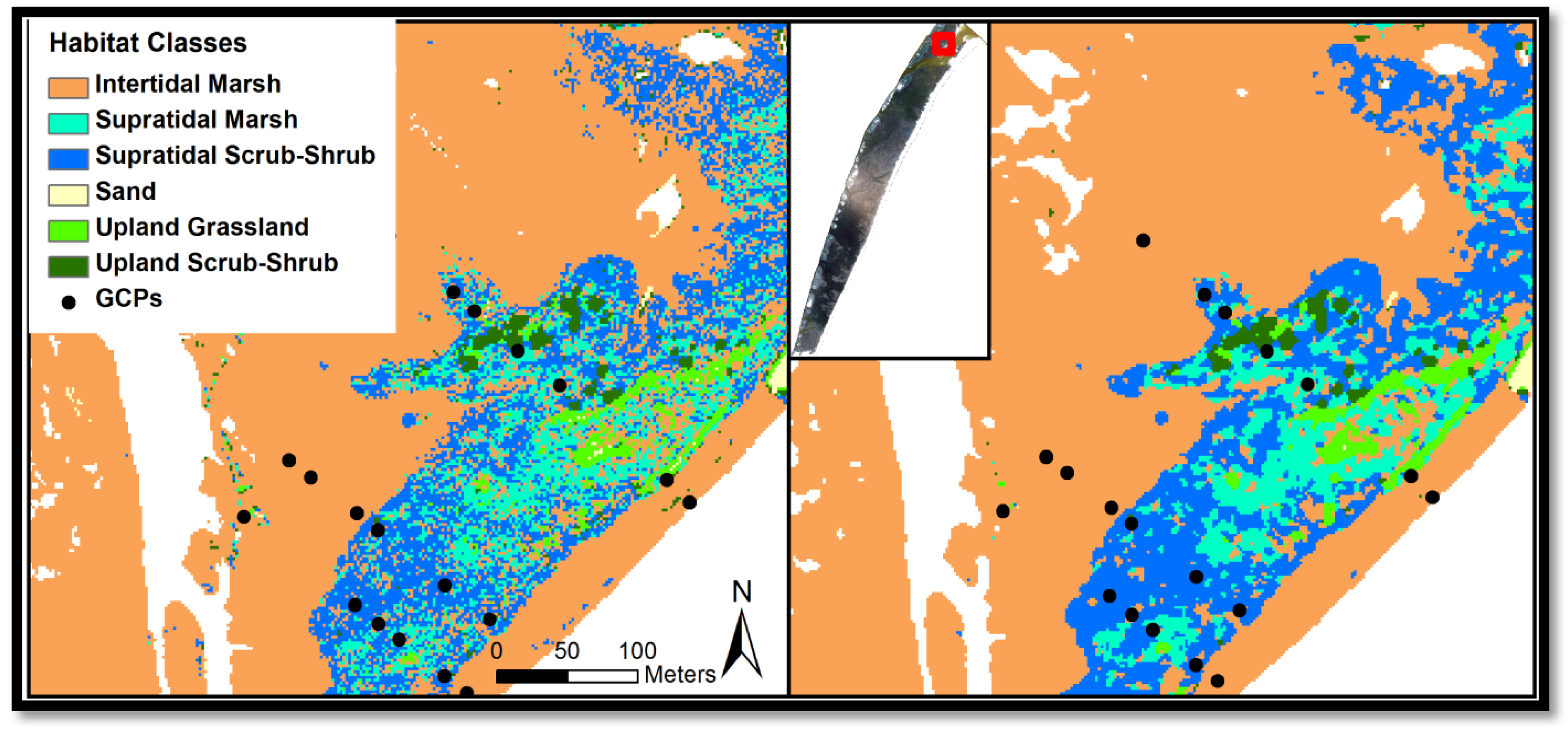
3.2. Masonboro Island Study Area
| Sharpen | Band Combinations | UNSUPERVISED | Kappa | Majority Filter | Kappa | SUPERVISED | Kappa | Majority Filter |
|---|---|---|---|---|---|---|---|---|
| No | NIR, G, B | 71.90 | 0.6263 | 71.24 | 0.6188 | 71.24 | 0.6206 | 71.24 |
| All 8 | 75.16 | 0.6736 | 72.55 | 0.6393 | 77.12 | 0.6992 | 80.39 | |
| Pan | NIR, G, B | 66.01 | 0.5439 | 67.32 | 0.5616 | 70.59 | 0.6185 | 69.93 |
| All 8 | 68.63 | 0.5862 | 70.59 | 0.612 | 71.90 | 0.6343 | 73.20 | |
| No | Red Edge, yellow, coast | 69.28 | 0.5912 | 65.36 | 0.5413 | 75.16 | 0.6743 | 75.82 |
| Pan | Red Edge, yellow, coast | 69.28 | 0.5881 | 69.93 | 0.5981 | 70.59 | 0.6177 | 71.24 |
| No | NIR, G, Elevation | 69.93 | 0.6017 | 67.97 | 0.578 | 73.20 | 0.6478 | 75.16 |
| All 8 + Elevation | 66.67 | 0.5512 | 67.32 | 0.5601 | 68.63 | 0.57 | 69.28 | |
| Pan | NIR, G, Elevation | 69.28 | 0.5954 | 67.97 | 0.5766 | 72.55 | 0.6435 | 70.59 |
| All 8 + Elevation | 68.63 | 0.5855 | 69.93 | 0.6017 | 77.12 | 0.7026 | 71.90 | |
| No | NIR, G, Texture | 67.97 | 0.5782 | 67.97 | 0.5785 | 68.63 | 0.5907 | 72.55 |
| All 8 + Texture | 71.90 | 0.6276 | 71.24 | 0.618 | 70.59 | 0.599 | 71.90 | |
| Pan | NIR, G, Texture | 71.90 | 0.6293 | 71.24 | 0.6208 | 66.67 | 56.77 | 66.67 |
| All 8 + Texture | 73.86 | 0.6540 | 74.51 | 0.6623 | 71.90 | 0.6178 | 72.55 | |
| No | NIR, G, B | 60.58 | 0.4856 | 60.58 | 0.4849 | 60.58 | 0.4856 | 68.61 |
| All 4 | 58.39 | 0.4551 | 59.12 | 0.4649 | 58.39 | 0.4551 | 70.07 | |
| Pan | NIR, G, B | 59.12 | 0.4613 | 59.12 | 0.4606 | 59.12 | 0.4613 | 70.80 |
| All 4 | 62.77 | 0.5103 | 63.5 | 0.5187 | 62.77 | 0.5103 | 72.26 | |
| No | NIR, G, Elevation | 59.85 | 0.4785 | 59.12 | 0.4617 | 63.50 | 0.534 | 65.69 |
| All 4 + Elevation | 59.12 | 0.4620 | 59.85 | 0.4688 | 64.96 | 0.5559 | 69.34 | |
| Pan | NIR, G, Elevation | 60.58 | 0.4767 | 59.85 | 0.4652 | 61.31 | 0.5099 | 66.42 |
| All 4 + Elevation | 59.12 | 0.4618 | 57.66 | 0.4425 | 69.34 | 0.6057 | 75.18 | |
| No | NIR, G, Texture | 59.85 | 0.4706 | 59.12 | 0.4595 | 60.58 | 0.4956 | 60.58 |
| All 4 + Texture | 59.12 | 0.4623 | 59.85 | 0.4703 | 65.69 | 0.5645 | 64.96 | |
| Pan | NIR, G, Texture | 61.31 | 0.4892 | 61.31 | 0.4862 | 56.93 | 0.4482 | 63.50 |
| All 4 + Texture | 59.12 | 0.4607 | 60.58 | 0.4795 | 64.23 | 0.5378 | 70.07 | |
| Pan | R, G, B | 46.72 | 0.2801 | 48.18 | 0.2995 | 46.72 | 0.2801 | 51.82 |
| Pan | R, G, Elevation | 65.38 * | 0.5403 | 67.69 * | 0.5678 | 64.23 | 0.5339 | 67.88 |
| All 3 + Elevation | 63.08 * | 0.5033 | 65.38 * | 0.5315 | 64.23 | 0.5345 | 66.42 | |
| Pan | R,G, Texture | 62.31 * | 0.4924 | 65.38 * | 0.532 | 49.64 | 0.3592 | 52.55 |
| All 3 + Texture | 63.08 * | 0.5050 | 66.15 * | 0.5429 | 51.09 | 0.3793 | 53.28 |
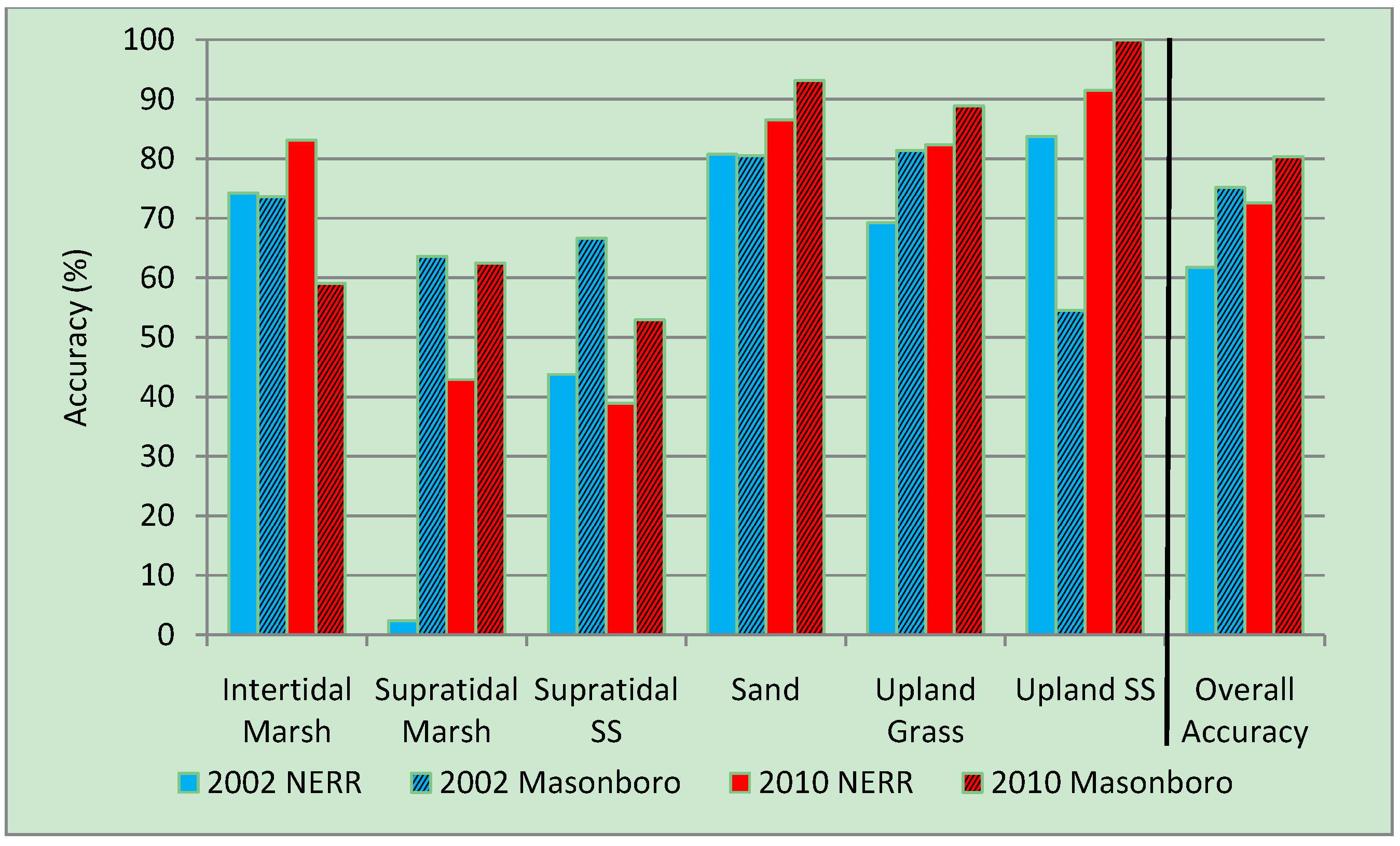
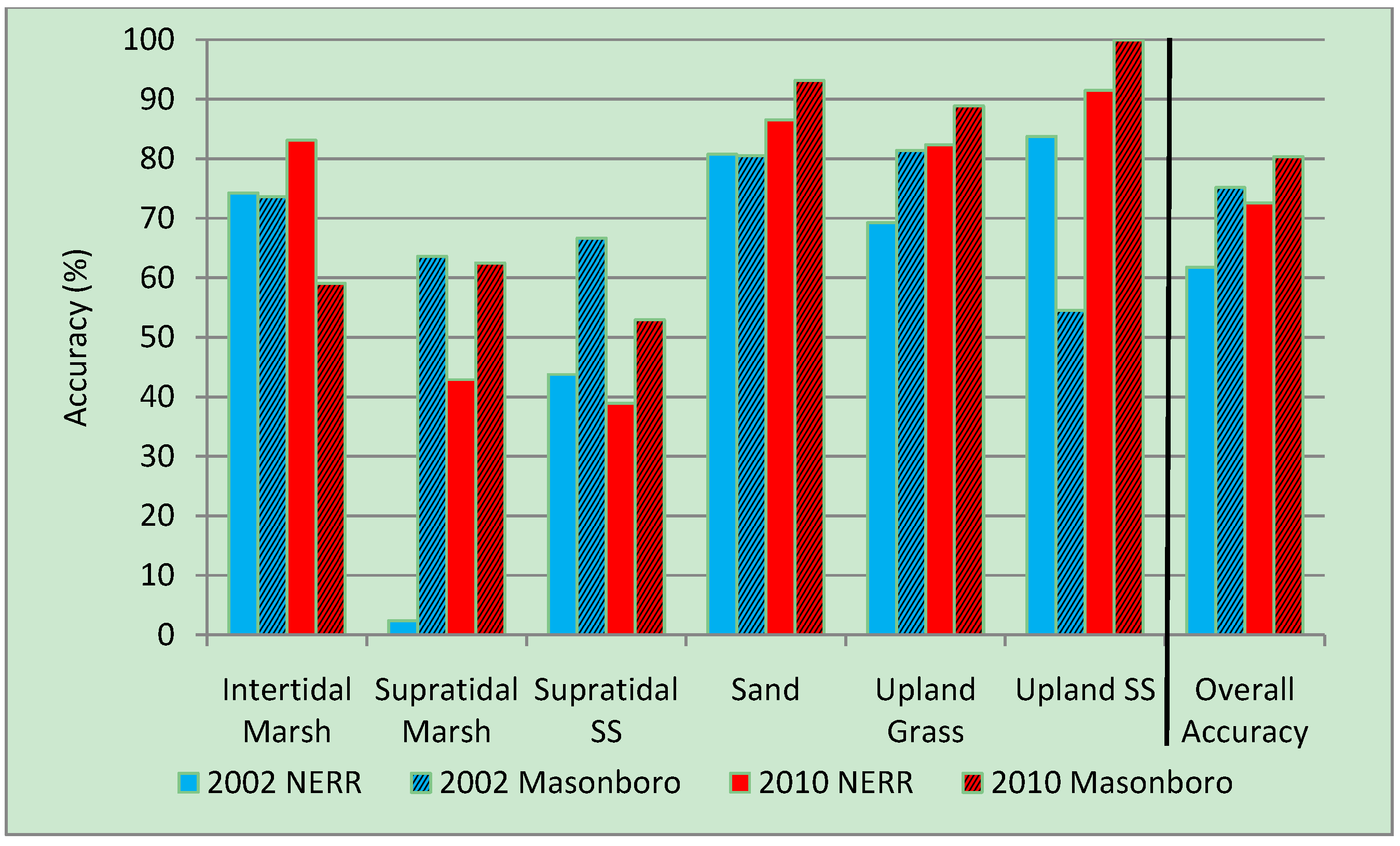
3.3. Habitat Class Accuracies
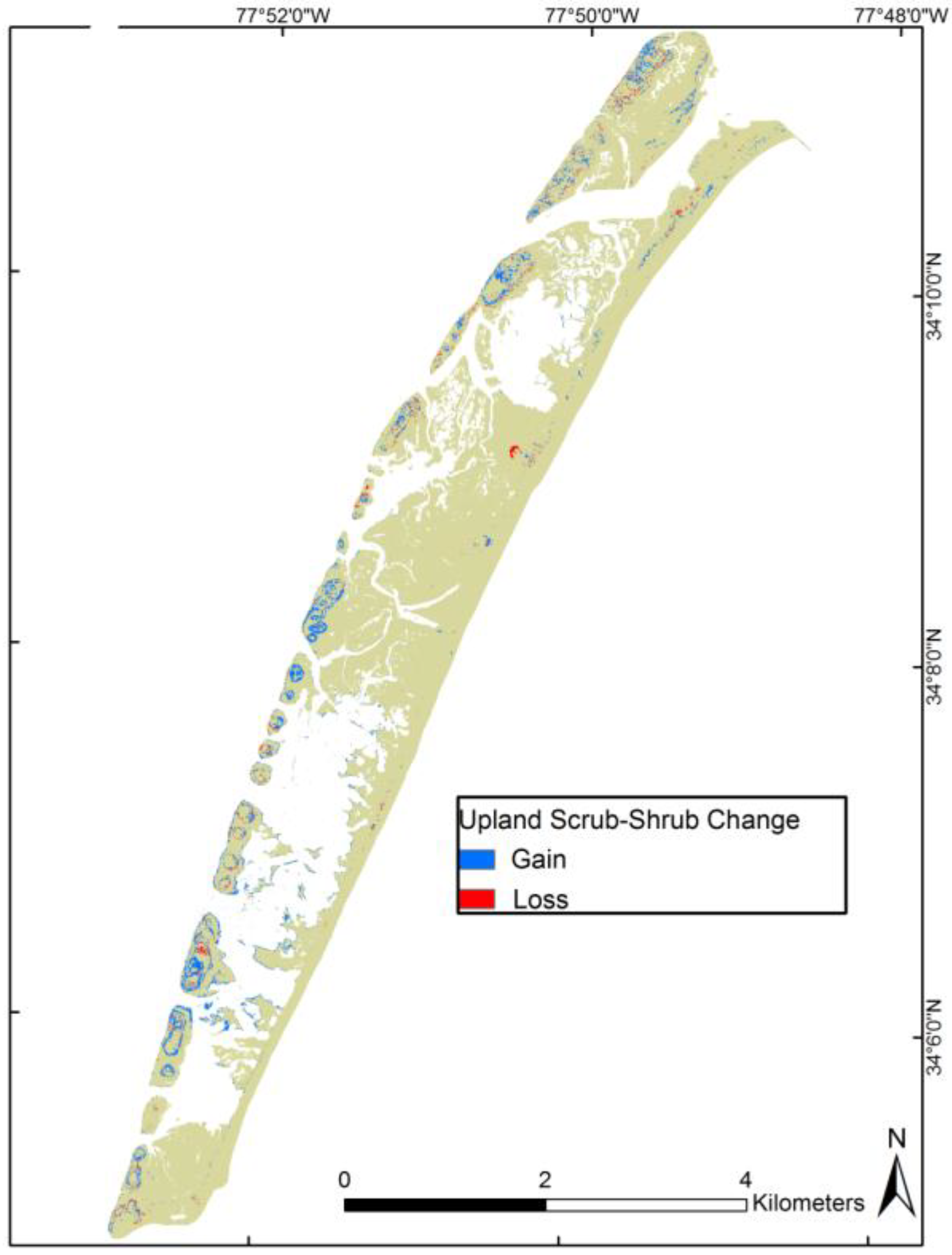
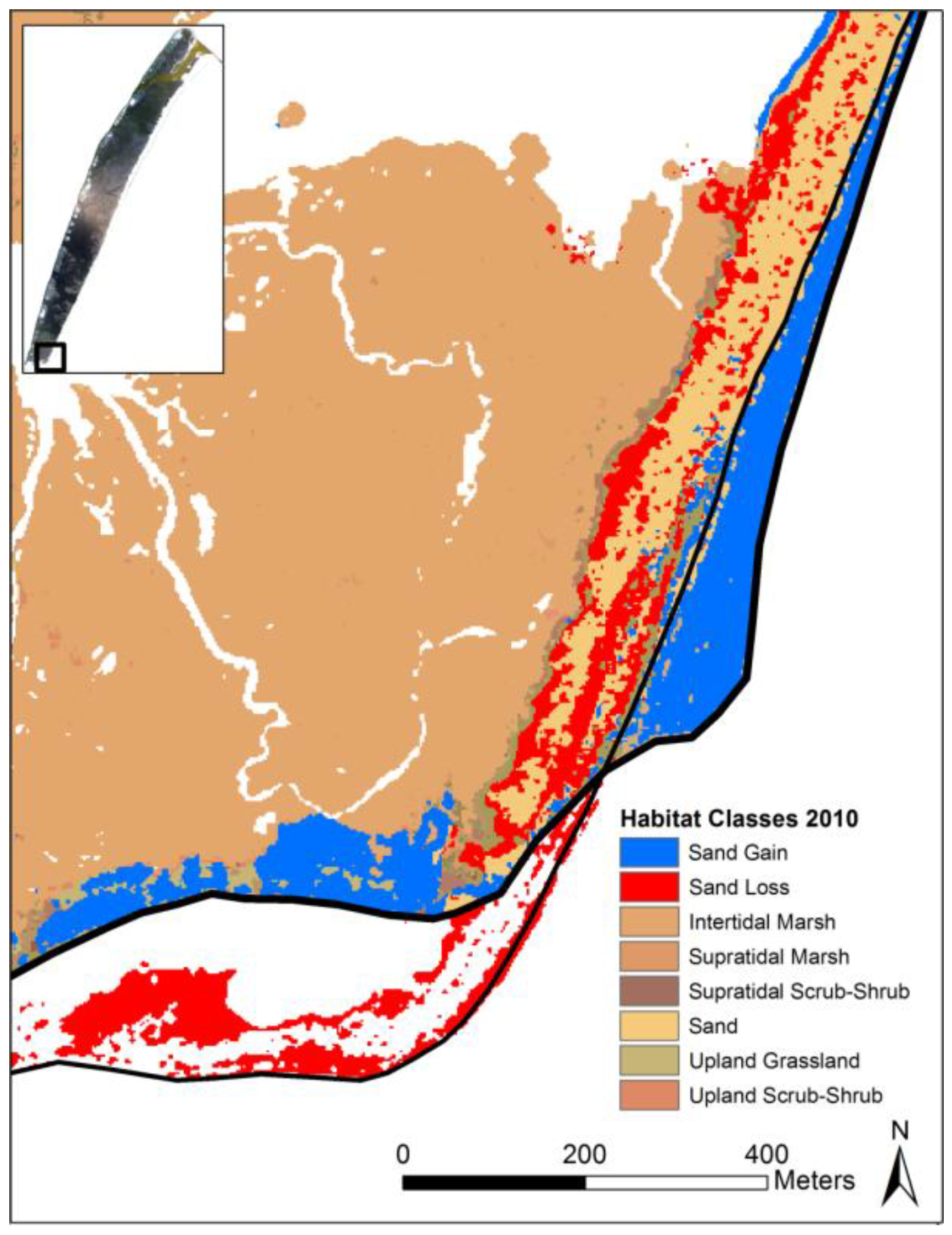
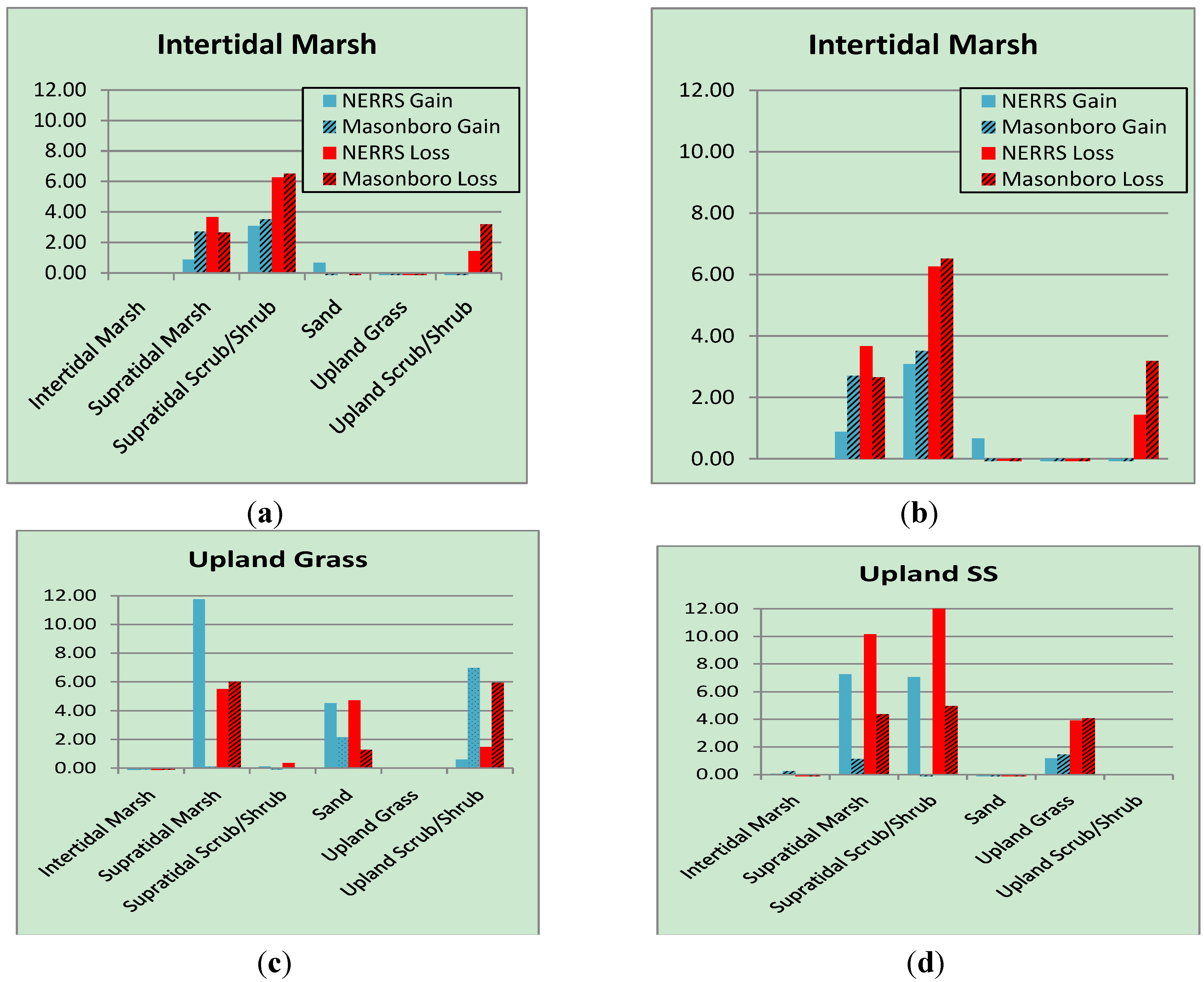
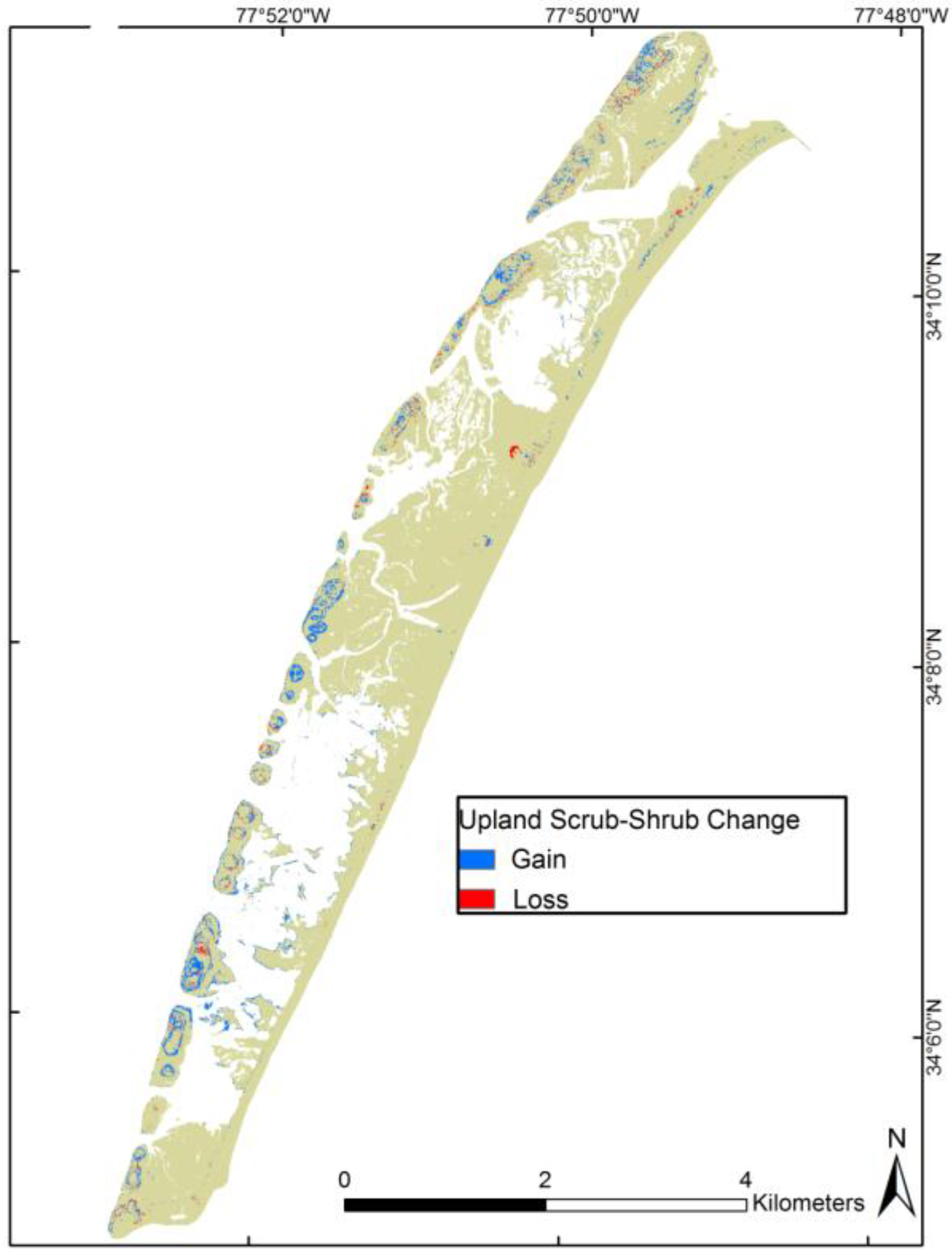
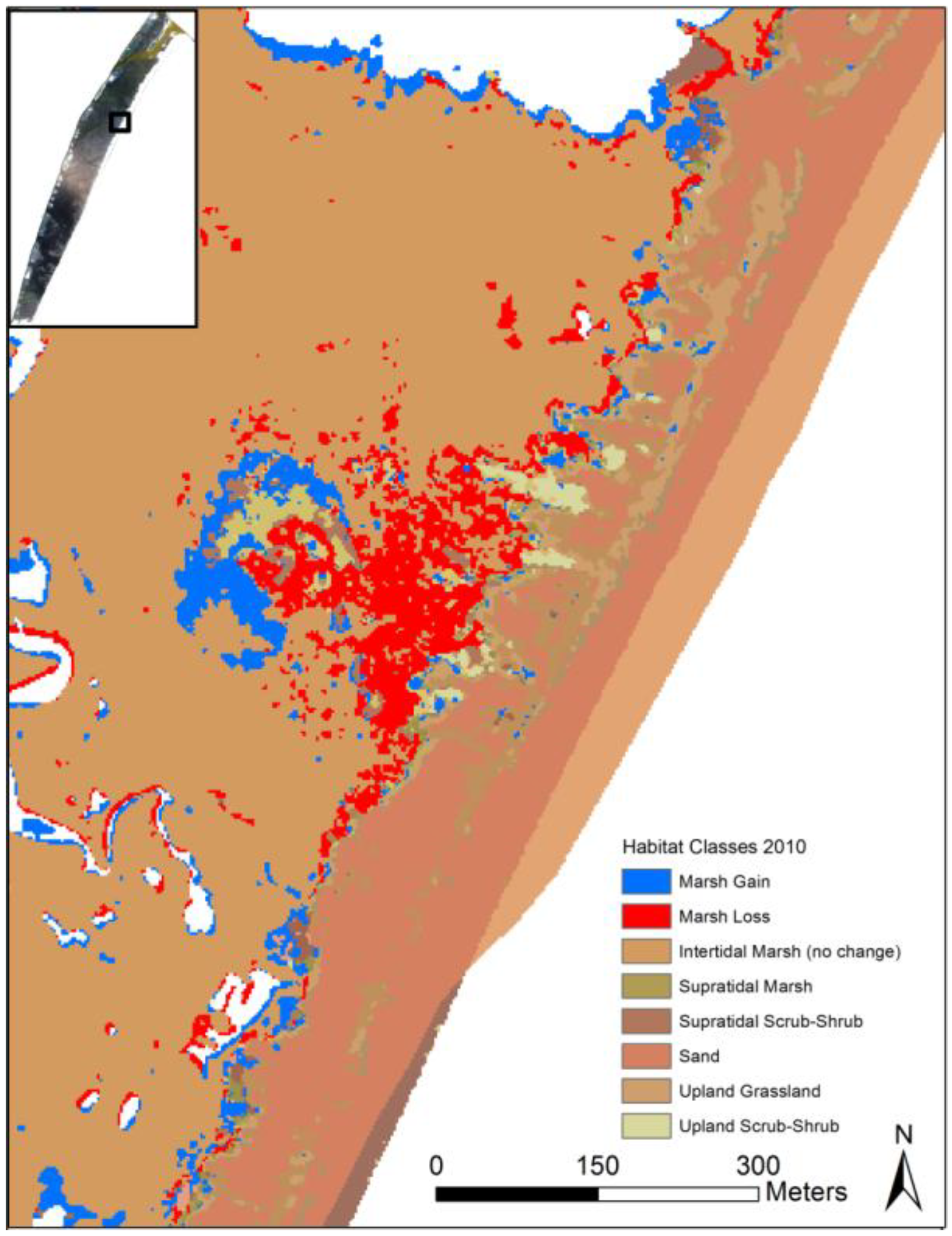
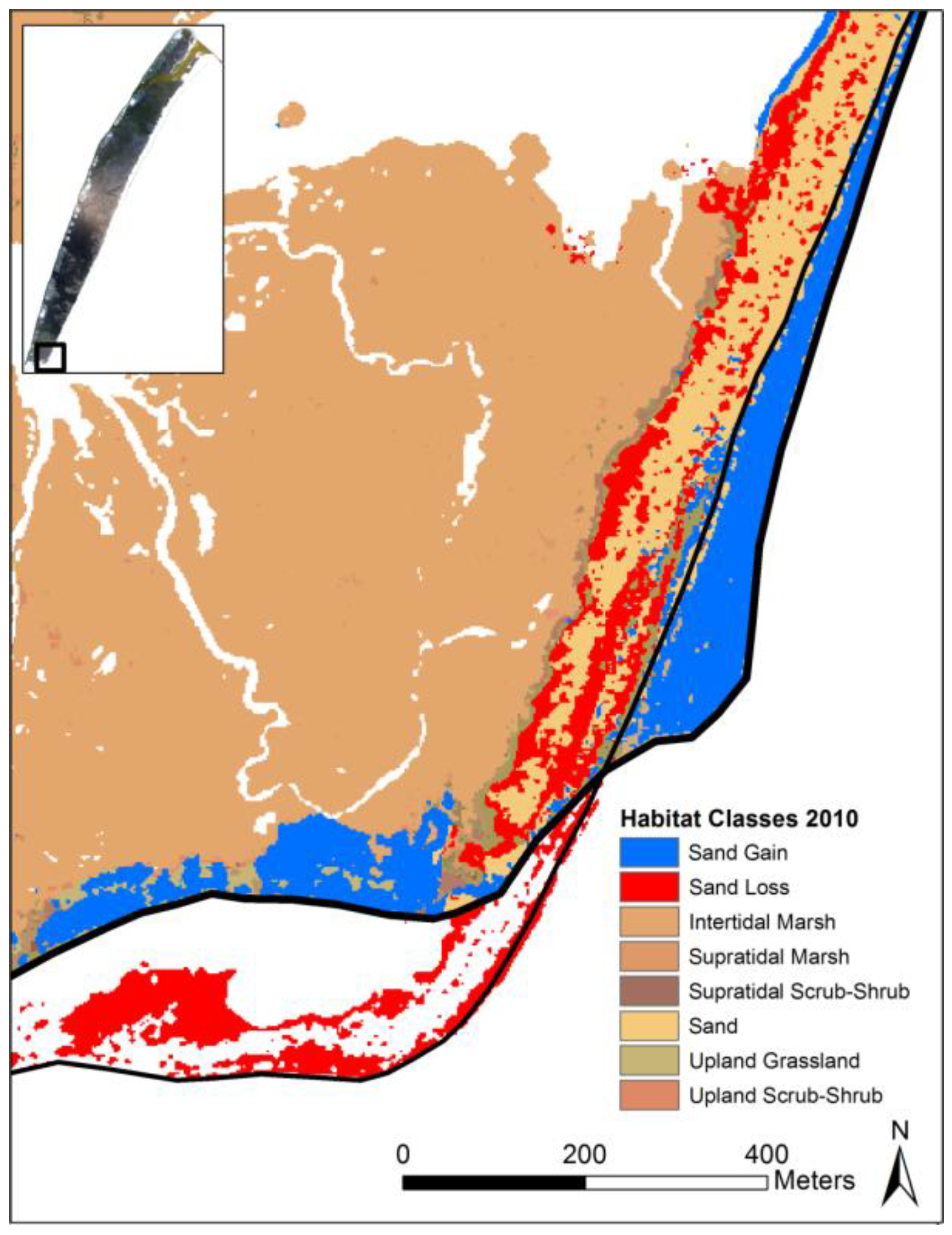
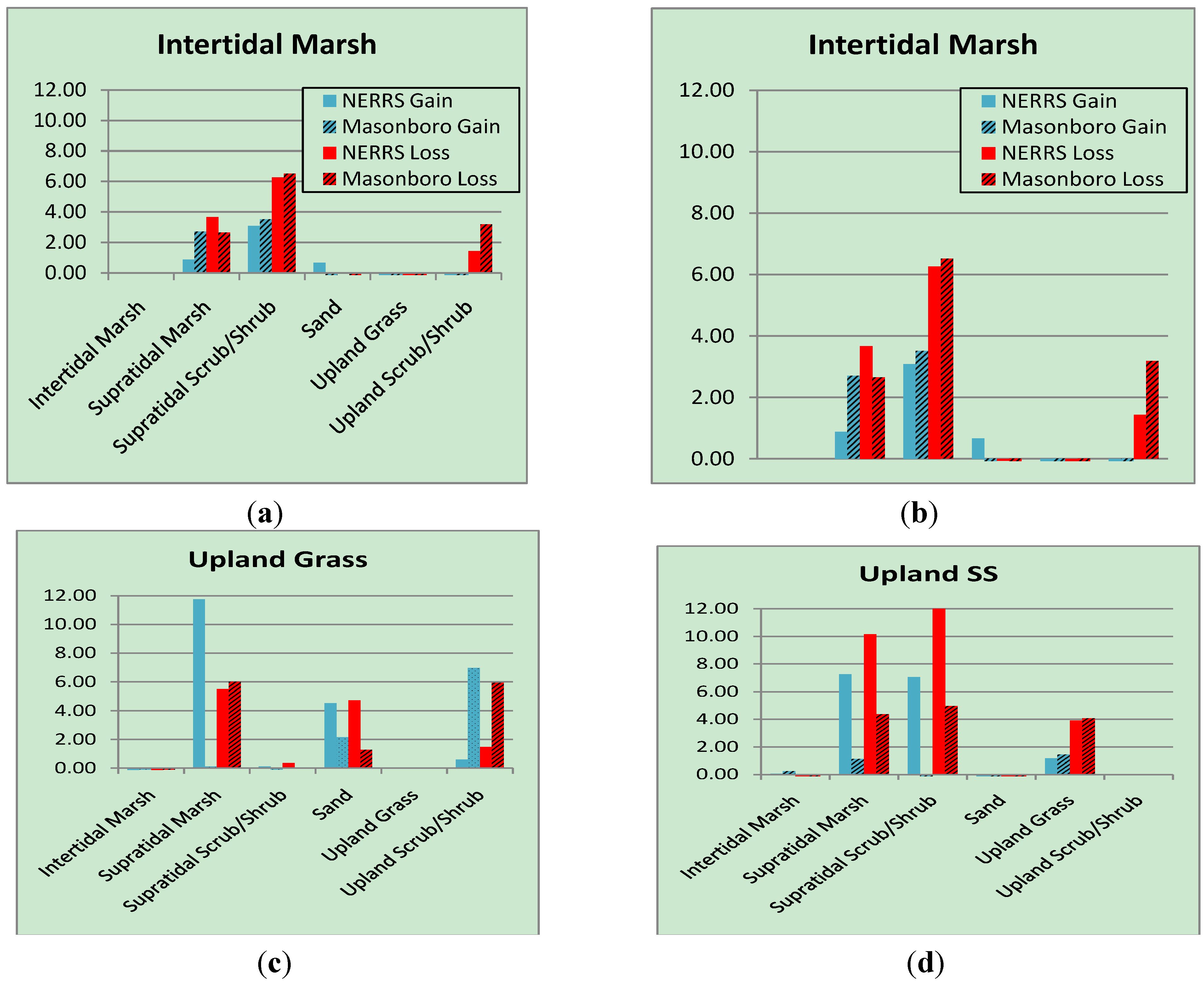
3.4. Habitat Change Analysis
| Gain | Loss | Total Change | Swap | |||||
|---|---|---|---|---|---|---|---|---|
| NERRS | Masonboro | NERRS | Masonboro | NERRS | Masonboro | NERRS | Masonboro | NERRS |
| 6.875 | 13.243 | 4.620 | 4.103 | 11.495 | 17.347 | 9.240 | 8.206 | 2.255 |
| 0.705 | 0.819 | 2.314 | 5.257 | 3.019 | 6.076 | 1.411 | 1.637 | 1.608 |
| 2.088 | 2.378 | 1.926 | 6.518 | 4.014 | 8.896 | 3.853 | 4.756 | 0.161 |
| 1.821 | 5.790 | 3.874 | 4.420 | 5.695 | 10.211 | 3.642 | 8.840 | 2.053 |
| 2.328 | 5.498 | 1.693 | 1.903 | 4.021 | 7.401 | 3.386 | 3.806 | 0.635 |
| 2.445 | 0.974 | 0.485 | 1.621 | 2.929 | 2.595 | 0.969 | 1.948 | 1.960 |
| 3.342 | 1.874 | 4.692 | 6.754 | 8.035 | 8.628 | 6.685 | 3.747 | 1.350 |
| 19.605 | 30.576 | 19.605 | 30.576 | 19.605 | 30.576 | 14.593 | 16.471 | 5.012 |
| Area (% of 2002) | Habitat Class in 2010 (Perent) | Class Total (2002) | ||||||
|---|---|---|---|---|---|---|---|---|
| Intertidal Marsh | Supratidal Marsh | Supratidal Scrub/Shrub | Sand | Upland Grass | Upland Scrub/Shrub | Water | ||
| Intertidal Marsh | 25.81 | 0.33 | 1.43 | 0.40 | 0.19 | 0.82 | 1.46 | 30.43 |
| Supratidal Marsh | 0.49 | 0.31 | 0.33 | 0.06 | 0.81 | 0.55 | 0.07 | 2.63 |
| Supratidal Scrub/Shrub | 1.09 | 0.15 | 0.77 | 0.03 | 0.07 | 0.55 | 0.03 | 2.70 |
| Sand | 1.36 | 0.04 | 0.02 | 4.39 | 1.11 | 0.04 | 1.31 | 8.26 |
| Upland Grass | 0.20 | 0.12 | 0.07 | 0.63 | 2.22 | 0.21 | 0.46 | 3.91 |
| Upland Scrub/Shrub | 0.11 | 0.06 | 0.19 | 0.01 | 0.11 | 2.44 | 0.01 | 2.92 |
| Water | 3.63 | 0.01 | 0.05 | 0.68 | 0.03 | 0.29 | 44.46 | 49.15 |
| Class Total (2010) | 32.69 | 1.02 | 2.86 | 6.21 | 4.54 | 4.88 | 47.80 | 100.00 |
| Area (% of 2002) | Habitat Class in 2010 (Percent) | Class Total (2002) | ||||||
|---|---|---|---|---|---|---|---|---|
| Intertidal Marsh | Supratidal Marsh | Supratidal Scrub/Shrub | Sand | Upland Grass | Upland Scrub/Shrub | Water | ||
| Intertidal Marsh | 25.10 | 0.29 | 1.52 | 0.64 | 0.23 | 0.36 | 1.07 | 29.21 |
| Supratidal Marsh | 3.89 | 0.36 | 0.41 | 0.17 | 0.37 | 0.12 | 0.28 | 5.62 |
| Supratidal Scrub/Shrub | 6.05 | 0.11 | 0.65 | 0.16 | 0.09 | 0.05 | 0.06 | 7.17 |
| Sand | 0.20 | 0.14 | 0.02 | 13.31 | 3.74 | 0.03 | 0.29 | 17.73 |
| Upland Grass | 0.39 | 0.18 | 0.07 | 0.93 | 5.56 | 0.19 | 0.15 | 7.47 |
| Upland Scrub/Shrub | 0.25 | 0.10 | 0.30 | 0.02 | 0.92 | 0.32 | 0.03 | 1.94 |
| Water | 2.45 | 0.01 | 0.06 | 3.87 | 0.14 | 0.21 | 24.11 | 30.86 |
| Class Total (2010) | 38.35 | 1.18 | 3.03 | 19.10 | 11.06 | 1.30 | 25.98 | 100.00 |


4. Discussion and Conclusions

Acknowledgments
Author contributions
Conflicts of Interest
References
- National Oceanic Atmospheric Administration. Barrier Islands: Formation and Evolution. Available online: http://www.csc.noaa.gov/beachnourishment/html/geo/barrier.htm (accessed on 12 April 2011).
- Sallenger, A.H., Jr. Storm impact scale for barrier islands. J. Coast. Res. 2000, 16, 890–895. [Google Scholar]
- Andrews, B.D.; Gares, P.A.; Colby, J.D. Techniques for GIS modeling of coastal dunes. Geomorphology 2002, 48, 289–308. [Google Scholar] [CrossRef]
- Fear, J. A Comprehensive Site Profile for the North Carolina National Estuarine Research Reserve, 2008. Available online: http://www.nerrs.noaa.gov/Doc/PDF/Reserve/NOC_SiteProfile. (accessed on 10 September 2010).
- Stutz, M.L.; Pilkey, O.H. Open-ocean barrier islands: Global influence of climatic, oceanographic, and depositional settings. J. Coast. Res. 2011, 27, 207–222. [Google Scholar] [CrossRef]
- Stallings, J.A.; Parker, A.J. The influence of complex systems interactions on barrier island dune vegetation pattern and process. Ann. Assoc. Am. Geogr. 2003, 93, 13–29. [Google Scholar] [CrossRef]
- Kutcher, T.E. Habitat and Land Cover Classification Scheme for the National Estuarine Research Reserve System, 2008. Available online: http://nerrs.noaa.gov/Doc/PDF/Stewardship/NERRClassificationSchemeDoc.pdf (accessed on 1 May 2011).
- Sellars, J.D.; Jolls, C.L. Habitat modeling for Amaranthus pumilus: An application of light detection and ranging (LIDAR) data. J. Coast. Res. 2007, 23, 1193–1202. [Google Scholar] [CrossRef]
- Gratton, C.; Denno, R. Restoration of arthropod assemblages in a Spartina salt marsh following removal of the invasive plant Phragmites australis. Restor. Ecol. 2005, 13, 358–372. [Google Scholar] [CrossRef]
- Laba, M.; Downs, R.; Smith, S.; Welsh, S.; Neider, C.; White, S.; Richmond, M.; Philpot, W.; Baveye, P. Mapping invasive wetland plants in the Hudson River National Estuarine Research Reserve using Quickbird satellite imagery. Remote Sens. Environ. 2008, 112, 286–300. [Google Scholar] [CrossRef]
- Pengra, B.; Johnston, C.; Loveland, T. Mapping an invasive plant, Phragmites australis, in coastal wetlands using the EO-1 Hyperion hyperspectral sensor. Remote Sens. Environ. 2007, 108, 74–81. [Google Scholar] [CrossRef]
- Zhou, H.; Jian, H.; Zhou, G.; Song, X.; Yu, S.; Chang, J.; Liu, S.; Jiang, Z.; Jiang, B. Monitoring the change of urban wetland using high spatial resolution remote sensing data. Int. J. Remote Sens. 2010, 31, 1717–1731. [Google Scholar] [CrossRef]
- Gesch, D.B. Analysis of LIDAR elevation data for improved identification and delineation of lands vulnerable to sea-level rise. J. Coast. Res. 2009, 53, 49–58. [Google Scholar] [CrossRef]
- Chust, G.; Galparsoro, I.; Borja, A.; Franco, J.; Uriarte, A. Coastal and estuarine habitat mapping, using LIDAR height and intensity and multi-spectral imagery. Estuar. Coast. Shelf Sci. 2008, 78, 633–643. [Google Scholar] [CrossRef]
- Zharikov, Y.; Skilleter, G.A.; Loneragan, N.R.; Taranto, T.; Cameron, B.E. Mapping and characterizing subtropical estuarine landscapes using aerial photography and GIS for potential application in wildlife conservation and management. Biol. Conserv. 2005, 125, 87–100. [Google Scholar] [CrossRef]
- Brock, J.C.; Wright, C.W.; Sallenger, A.H.; Krabill, W.B.; Swift, R.N. Basin and methods of NASA airborne topographic mapper LiDAR surveys for coastal studies. J. Coast. Res. 2002, 18, 1–13. [Google Scholar]
- Belluco, E.; Camuffo, M.; Ferrari, S.; Modenese, L.; Silvestri, S.; Marani, A.; Marini, M. Mapping salt-marsh vegetation by multispectral and hyperspectral remote sensing. Remote Sens. Environ. 2006, 105, 54–67. [Google Scholar] [CrossRef]
- DigitalGlobe. The Benefits of the 8 Spectral Bands of WorldView-2. Available online: http://www.digitalglobe.com (accessed on 20 September 2012).
- DigitalGlobe. QuickBird: Data Sheet. Available online: http//:www.digitalglobe.com (accessed on 20 September 2012).
- Ghioca-Robrecht, D.M.; Johnston, C.A.; Tulbure, M.G. Assessing the use of multiseason Quickbird imagery for mapping invasive species in a Lake Erie coastal marsh. Wetlands 2008, 28, 1028–1039. [Google Scholar] [CrossRef]
- Phinn, S.; Roelfsema, C.; Dekker, A.; Brando, V.; Anstee, J. Mapping seagrass species, cover and biomass in shallow waters: An assessment of satellite multi-spectral and airborne hyper-spectral imaging systems in Moreton Bay (Australia). Remote Sens. Environ. 2008, 112, 3413–3425. [Google Scholar] [CrossRef]
- Wang, Y.; Traber, M.; Milstead, B.; Stevens, S. Terrestrial and submerged aquatic vegetation mapping in fire island national seashore using high spatial resolution remote sensing data. Mar. Geod. 2007, 30, 77–95. [Google Scholar] [CrossRef]
- Dial, G.; Bowen, H.; Gerlach, F.; Grodecki, J.; Oleszczuk, R. IKONOS satellite, imagery, and products. Remote Sens. Environ. 2003, 88, 23–36. [Google Scholar] [CrossRef]
- Chust, G.; Grande, M.; Galparsoro, I.; Uriarte, A.; Borja, A. Capabilities of the bathymetric Hawk Eye LIDAR for coastal habitat mapping: A case study within a Basque estuary. Estuar. Coast. Shelf Sci. 2010, 89, 200–213. [Google Scholar] [CrossRef]
- Lee, S.D.; Shan, J. Combining LIDAR elevation data and IKONOS multispectral imagery for coastal classification mapping. Mar. Geol. 2003, 26, 117–127. [Google Scholar]
- Woolard, J.W.; Colby, J.D. Spatial characterization, resolution, and volumetric change of coastal dunes using airborne LIDAR: Cape Hatteras, North Carolina. Geomorphology 2002, 48, 269–287. [Google Scholar] [CrossRef]
- Onojeghuo, A.O.; Blackburn, G.A. Optimising the use of hyperspectral and LIDAR data for mapping reed bed habitats. Remote Sens. Environ. 2011, 115, 2025–2034. [Google Scholar] [CrossRef]
- Lu, D.; Batistella, M.; Moran, E. Land-cover classification in the Brazilian Amazon with the integration of Landsat ETM+ and Radarsat data. Int. J. Remote Sens. 2007, 28, 5447–5459. [Google Scholar] [CrossRef]
- Mitasova, H.; Overton, M.F.; Recalde, J.J.; Bernstein, D.J.; Freeman, C.W. Raster-based analysis of coastal terrain dynamics from multitemporal LIDAR data. J. Coast. Res. 2009, 25, 507–514. [Google Scholar]
- Wu, J.; Wang, D.; Bauer, M.E. Image-based atmospheric correction of QuickBird imagery of Minnesota cropland. Remote Sens. Environ. 2005, 99, 315–325. [Google Scholar]
- Lillesand, T.; Kiefer, R.; Chipman, J. Remote Sensing and Image Interpretation, 6th ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2008. [Google Scholar]
- Chen, S.; Chen, L.; Liu, Q.; Li, X.; Tan, Q. Remote sensing and GIS-based integrated analysis of coastal changes and their environmental impacts in Lingding Bay, Pearl River Estuary, South China. Ocean Coast. Manag. 2004, 48, 65–83. [Google Scholar] [CrossRef]
- Krause, G.; Bock, M.; Weiers, S.; Braun, G. Mapping land-cover and mangrove structures with remote sensing techniques: A contribution to synoptic GIS in support of coastal management in north Brazil. Environ. Manag. 2004, 34, 429–440. [Google Scholar] [CrossRef]
- R Core Team. R: A Language and Environment for Statistical Computing; R foundation for statistical computing: Vienna, Austria, 2013. [Google Scholar]
- Ismail, M.H.; Jusoff, K. Satellite data classification accuracy assessment based from reference dataset. Int. J. Comput. Inf. Sci. Eng. 2008, 2, 96–102. [Google Scholar]
- Leeuw, J.D.; Jia, H.; Yang, L.; Liu, X.; Schmidt, K.; Skidmore, A.K. Comparing accuracy assessments to infer superiority of image classification methods. Int. J. Remote Sens. 2006, 27, 223–232. [Google Scholar] [CrossRef]
- Rozenstein, O.; Karnieli, A. Comparison of methods for land-use classification incorporating remote sensing and GIS inputs. Appl. Geogr. 2011, 31, 533–544. [Google Scholar] [CrossRef]
- Lu, D.; Mausel, P.; Brondizio, E.; Moran, E. Change detection techniques. Int. J. Remote Sens. 2003, 25, 2365–2407. [Google Scholar]
- Pontius, R.G.; Shusas, E.; McEachern, M. Detecting important categorical land changes while accounting for persistence. Agric. Ecosyst. Environ. 2004, 101, 251–268. [Google Scholar] [CrossRef]
- Heumann, B. An object-based classification of mangroves using a hybrid decision tree-support vector machine approach. Remote Sens. 2011, 3, 2440–2460. [Google Scholar] [CrossRef]
- Novack, T.; Esch, T.; Kux, H.; Stilla, U. Machine learning comparison between worldview-2 and quickbird-2-simulated imagery regarding object-based urban land cover classification. Remote Sens. 2011, 3, 2263–2282. [Google Scholar] [CrossRef]
- Montreuil, A.; Bullard, J.; Chandler, J.; Millet, J. Decadal and seasonal development of embryo dunes on an accreting macrotidal beach: North Lincolnshire, UK. Earth Surf. Processes Landf. 2013, 38, 1851–1868. [Google Scholar] [CrossRef]
- Manandhar, R.; Odeh, I.O.A.; Pontius, G.R. Analysis of twenty years of categorical land transitions in the Lower Hunter of New South Wales, Australia. Agric. Ecosyst. Environ. 2010, 135, 336–346. [Google Scholar] [CrossRef]
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
McCarthy, M.J.; Halls, J.N. Habitat Mapping and Change Assessment of Coastal Environments: An Examination of WorldView-2, QuickBird, and IKONOS Satellite Imagery and Airborne LiDAR for Mapping Barrier Island Habitats. ISPRS Int. J. Geo-Inf. 2014, 3, 297-325. https://doi.org/10.3390/ijgi3010297
McCarthy MJ, Halls JN. Habitat Mapping and Change Assessment of Coastal Environments: An Examination of WorldView-2, QuickBird, and IKONOS Satellite Imagery and Airborne LiDAR for Mapping Barrier Island Habitats. ISPRS International Journal of Geo-Information. 2014; 3(1):297-325. https://doi.org/10.3390/ijgi3010297
Chicago/Turabian StyleMcCarthy, Matthew J., and Joanne N. Halls. 2014. "Habitat Mapping and Change Assessment of Coastal Environments: An Examination of WorldView-2, QuickBird, and IKONOS Satellite Imagery and Airborne LiDAR for Mapping Barrier Island Habitats" ISPRS International Journal of Geo-Information 3, no. 1: 297-325. https://doi.org/10.3390/ijgi3010297