1. Introduction
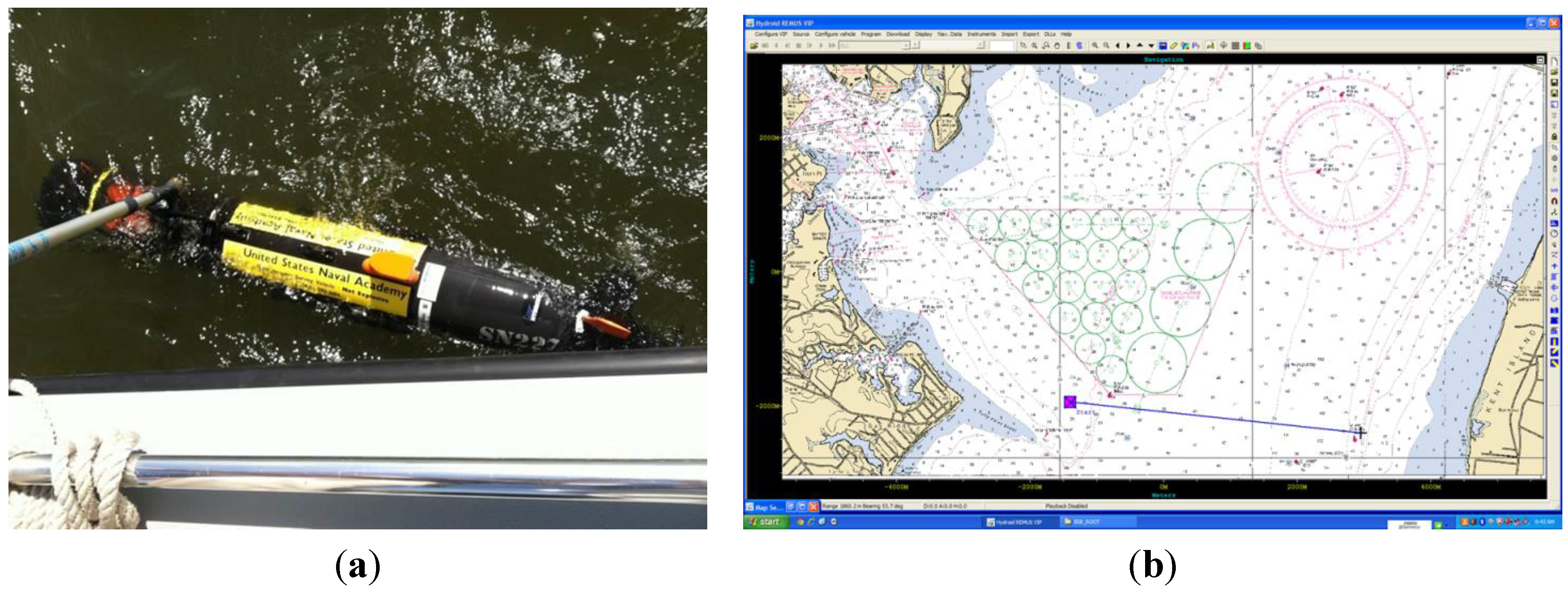
The Naval Academy operates a variety of Autonomous Underwater Vehicles (AUVs) for educational and research purposes, including Remote Environmental Measuring Units (REMUS), made by Hydroid [
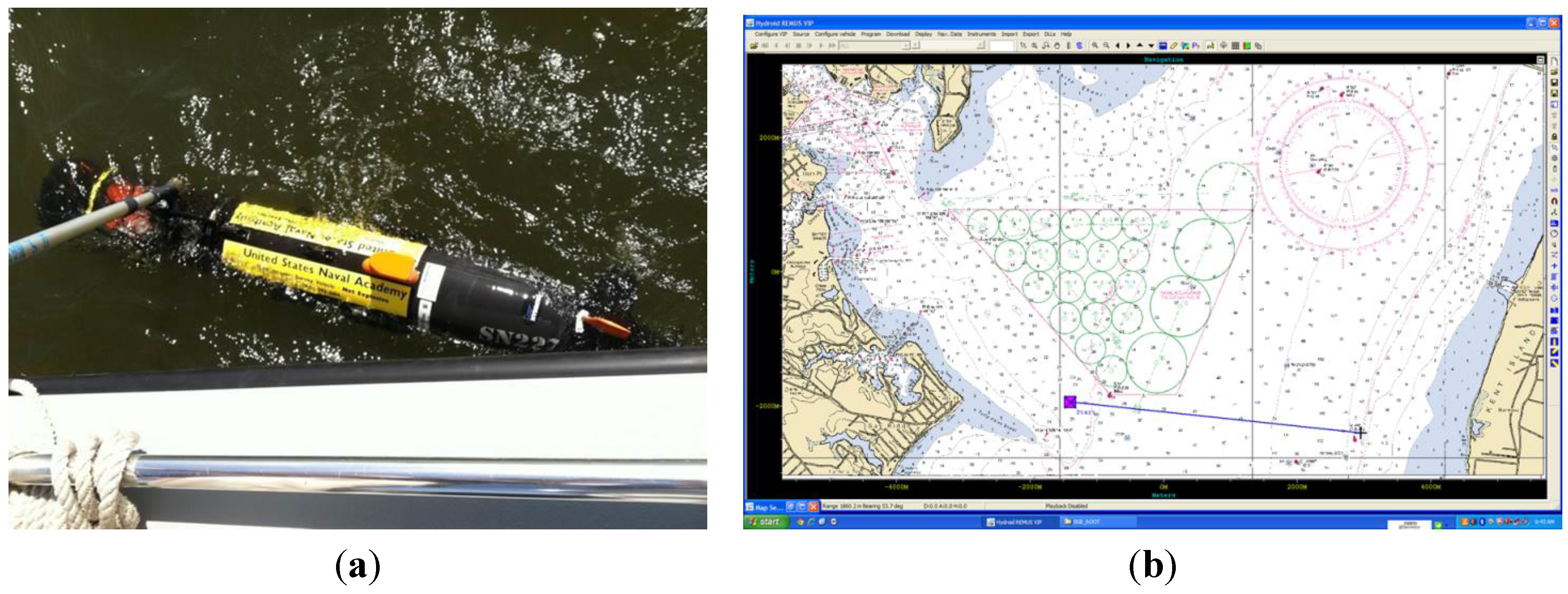
1]. The REMUS AUV is depicted in
Figure 1. These AUV units can be programmed to follow a sequence of straight-line path segments between waypoints while collecting data; refer to
Figure 1. Using such capability, REMUS can follow any trajectory specified by waypoints from launch to destination; one that has properties in support of its mission such as “minimum time” and “minimum energy.” This paper expands on research done in a previous work, in which the authors investigated the “minimum-time” path in the presence of an unknown current [
2]. The case where the magnitude and direction of currents is known has been studied in the optimal control literature and is referred to as Zermelo’s problem [
3]. More recently, the same problem has been investigated further in the context of underwater vehicles [
4,
5,
6]. Along the same line of research, solutions in known time-varying current fields have also been reported [
7,
8]. A real-time approach to path corrections for unknown time-varying currents has been developed in [
9]. Using data-based current fields, path planning for realistic ocean variability has been addressed in [
10].
Figure 1.
(a) REMUS deployed for data collection in the Severn River, Maryland; (b) Linear path specified on the REMUS’ graphical interface.
Figure 1.
(a) REMUS deployed for data collection in the Severn River, Maryland; (b) Linear path specified on the REMUS’ graphical interface.
The objectives of this work are two-fold. First, the authors develop an approach to a “best” time path for Autonomous Underwater Vehicles conducting oceanographic measurements under uncertain current, which is the most significant environmental factor affecting elapsed time or expended energy when following a desired trajectory. Second, a multi-objective function is then used to weigh the time to complete a mission versus measurement inaccuracy due to deviation from the desired path. Ideally, it would seem best to conduct surveys with the smallest possible measurement error. However, there are factors that would require the vehicle to survey an area more quickly at the expense of having some measurement error. For example, an underwater vehicle only has a finite amount of energy to expend in completing its survey. This is not only the energy required to travel the survey path, but also energy to run the onboard sensors and processors. Second, an underwater vehicle can only operate for a finite amount of time before its inertial navigation system develops too much error, causing its survey path to insert even more measurement error. For these reason, it is imperative to be able to accept a certain amount of measurement error in order to reduce the mission time.
In the authors’ view, there are two approaches to tackle the problem of uncertain current. First, knowledge of extreme variations of current can be used for worst-case planning; that is, to select the “best” trajectory from a range of least favorable outcomes. Second, on-board velocity sensors can be used for adaptive planning, where the “best” trajectory from the vehicle’s actual position is recomputed at sample intervals. The authors follow the former approach. To determine the worst-case float plan, the authors solve numerically for the minimum time trajectory, respectively, for a number of known current strengths, S, covering the range between ebb and flow waters.
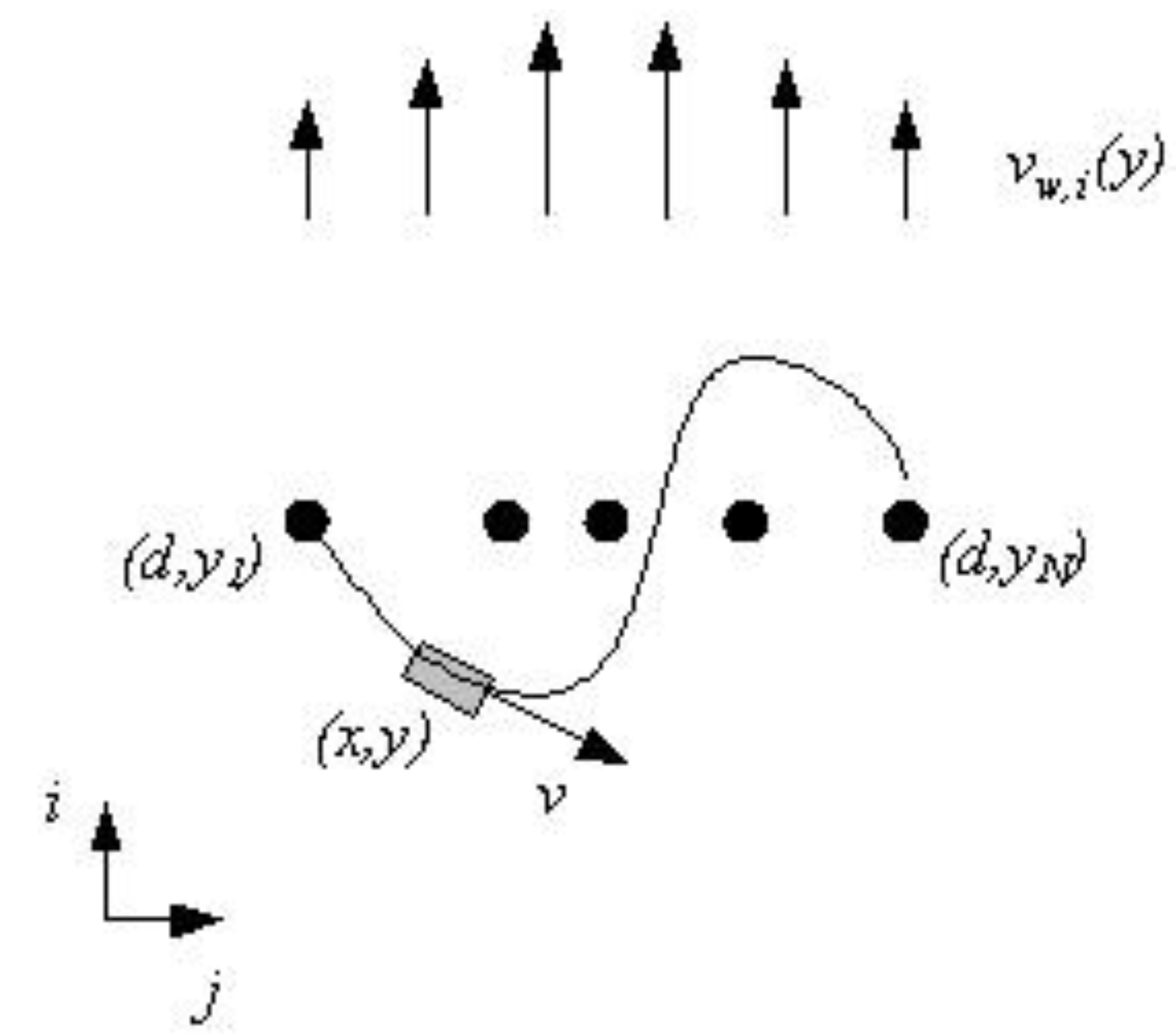
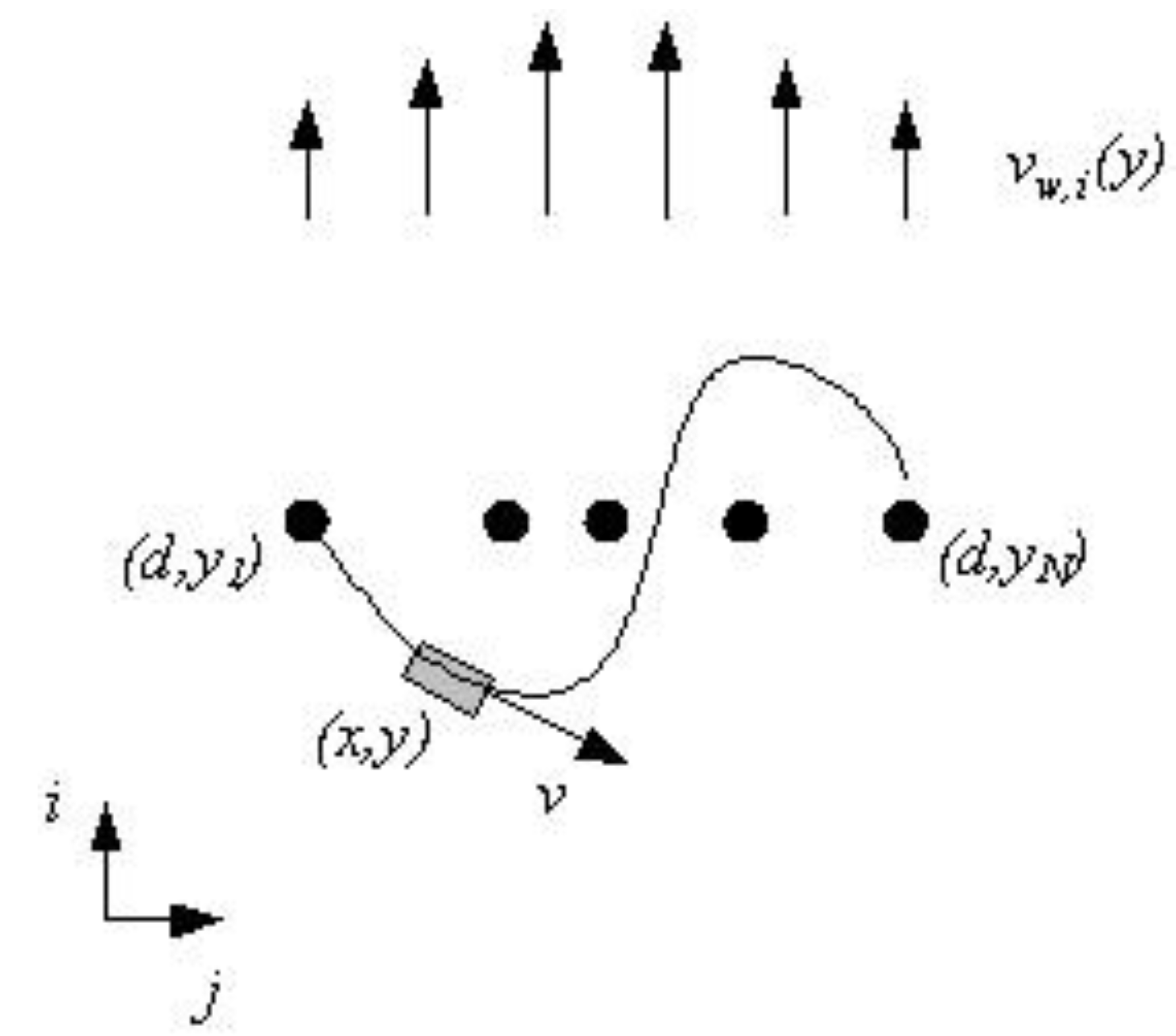
In addition to the objective “time”, the authors consider “measurement error” due to deviation from the intended geographic location. The reason for deviation is that the AUV need also reach a large number of locations in a short period of time. Typically, oceanographic surveys follow a “lawn-mowing” path conducting measurements at locations along each line segment; refer to
Figure 2. In the absence of current, the “minimum-time” paths coincide with the respective line segments. When a current is present, however, the “minimum-time” paths are curved; thus, short travel times come at the expense of measurement error. The problem of energy-exhausting survey missions in fast-flowing waters has been studied in [
11]. Trade-offs between energy onboard the AUV and spatial survey error have been investigated in an earlier work [
12].
Figure 2.
Measurement locations and “minimum-time” path in current.
Figure 2.
Measurement locations and “minimum-time” path in current.
For example,
Figure 2 depicts an AUV traversing a “minimum-time” path. The current flows in the unit vector
direction and its profile changes along the unit vector
direction. There are
N intended locations for conducting measurement, lying along
, with coordinates
. AUV trajectory is denoted as
. The (spatially) cumulative error due to deviation from desired measurement locations is:
where
is the Kronecker delta function. In the proposed approach, the authors weigh such “measurement error” against the “time” to traverse the path under current. The multi-objective functional is the weighted sum of two conflicting objectives associated with “time” and (geographic) “measurement error.” Using the numerical optimization tool DIDO [
13], the authors analyze the effect that the weighting of these objectives has on their respective fulfillment.
The paper is organized as follows. Under
Section 2, the problem is bounded; the scope of the investigation defined. In
Section 3, the authors perform an analytical investigation in order to estimate the effect of different current profiles on the optimal trajectories and to weigh the time to complete a mission
versus measurement inaccuracy due to deviation from the desired path.
Section 4 presents the main results, arrived at by means of the numerical optimization.
2. Modeling Assumptions
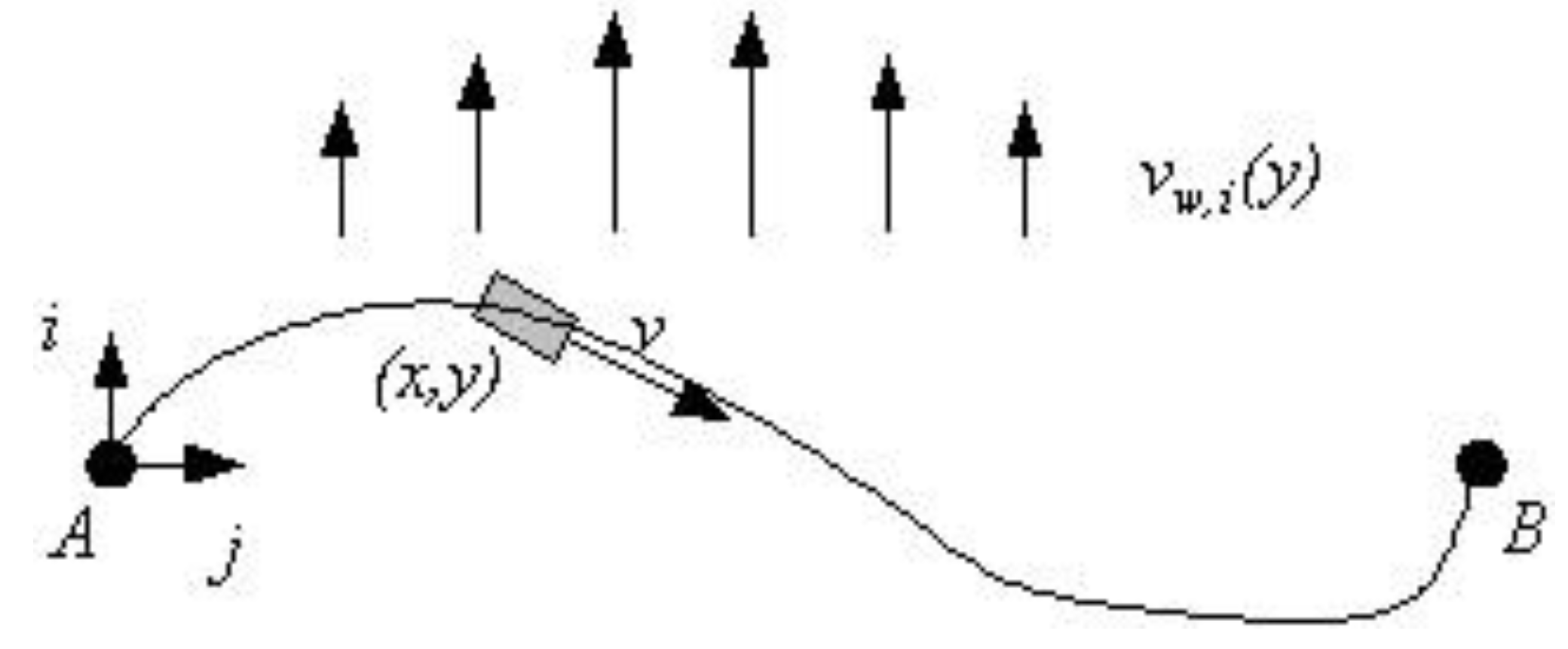
Consider an earth-fixed reference frame defined by an orthogonal basis
; refer to
Figure 3. Relative to the basis, the REMUS’ velocity components have as follows:
where
v is the vehicle’s speed relative to the water and adjustable in the interval
; for REMUS,
. Furthermore, θ denotes the vehicle’s course;
and
are components of water’s flow rate.
Figure 3.
Vehicle path in one-dimensional current flow.
Figure 3.
Vehicle path in one-dimensional current flow.
Referring to
Figure 2 and
Figure 3, the start and end points A and B are at (0, 0) and (0,
l); the straight distance
l = 1800 m. The current flows along unit vector
i only, that is,
. Furthermore, the profile of
is independent of the position
x, that is,
.
To simplify presentation, the authors adopt the following convention:
The objective function is:
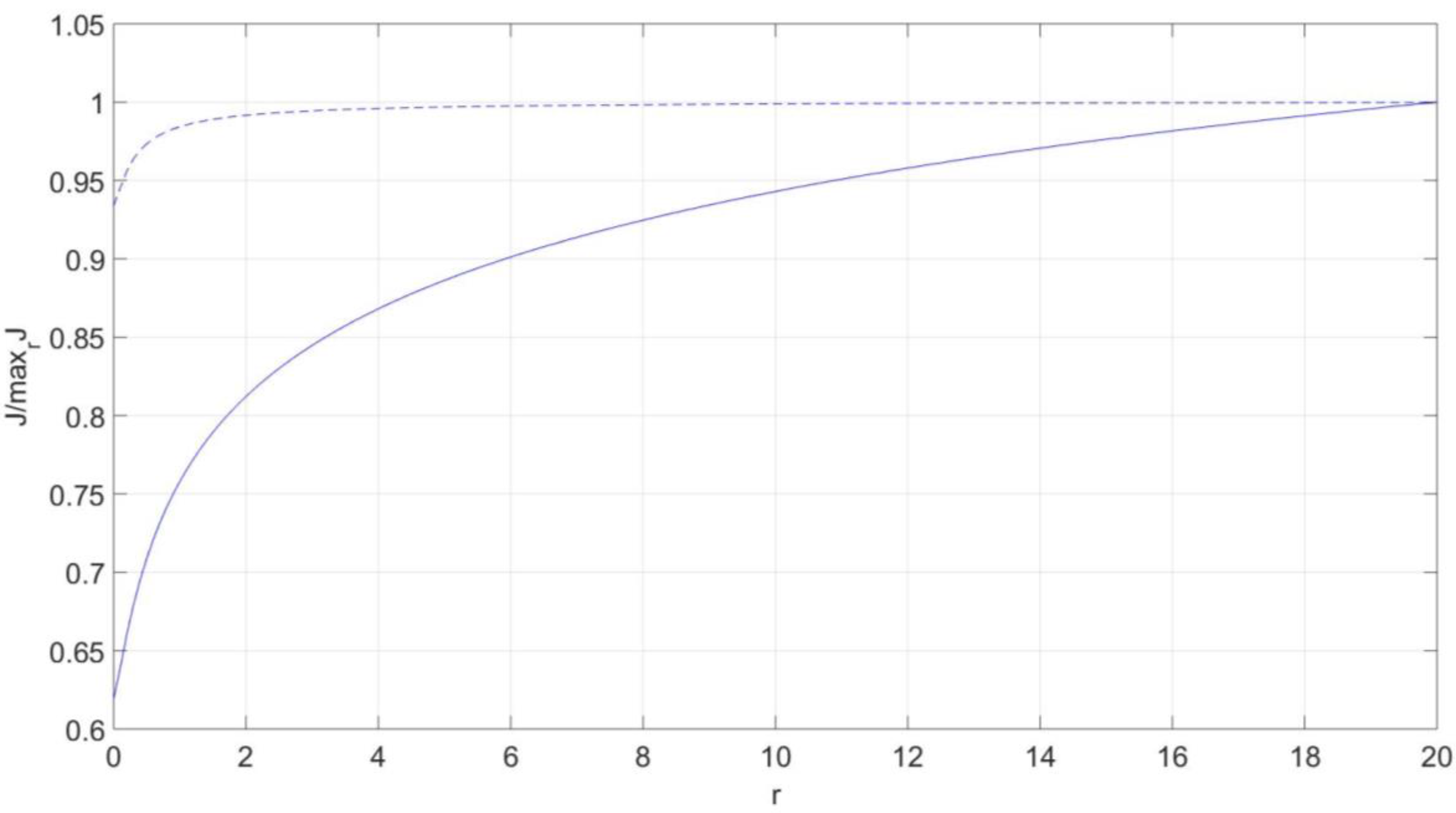
For the “minimum time” path from point A to B, the integrand is . When the problem weighs both “time” and “accuracy” the integrand becomes . The second objective captures the essence of the cumulative error in Equation (1). If the weight r = 0, the problem becomes one of “minimum time”; if , one of “minimum measurement error”.
3. Analytical Approach to an Extremal Path
The following optimization problem results from the given modeling assumptions:
subject to Equation (3).
Let
be an extremum. For the “minimum time” path the Hamiltonian function is:
When the problem weighs both “time” and “accuracy” the Hamiltonian function becomes:
where
are Lagrange multipliers.
According to Pontryagin’s minimum principle, evaluated at the extremum and at the solution of the adjoint equation:
the Hamiltonian is constant; its value calculated as follows:
At the minimum of the Hamiltonian:
Substitution in Equation (6) from Equation (2) results in the following necessary condition for
to be an extremum:
Equivalently, the decision variable (here, heading input) is optimal, θ*, only if:
Adjoint Variables: Effect of Current
From Equations (6) and (12), the current is affecting the heading indirectly and through the adjoint variables. After manipulation, Equation (8) yields the following:
If , a constant flow profile, then the adjoint equations integrate to constants. Equation (12) shows the optimum heading is necessarily constant. The optimum path is a straight line from A to B and the vehicle will have to sail across maintaining the optimum heading in a “crabbing” fashion.
The current profile
, a linear flow profile, is studied in [
3]. The adjoint equations are as follows:
Then, the necessary condition for optimum heading becomes:
The following piecewise-linear current profile allows for the flow rate to equal zero on the boundaries and to peak in the middle:
From Equation (13), the second adjoint equation yields:
The optimum for the “second leg” of the float plan resembles the previous case.
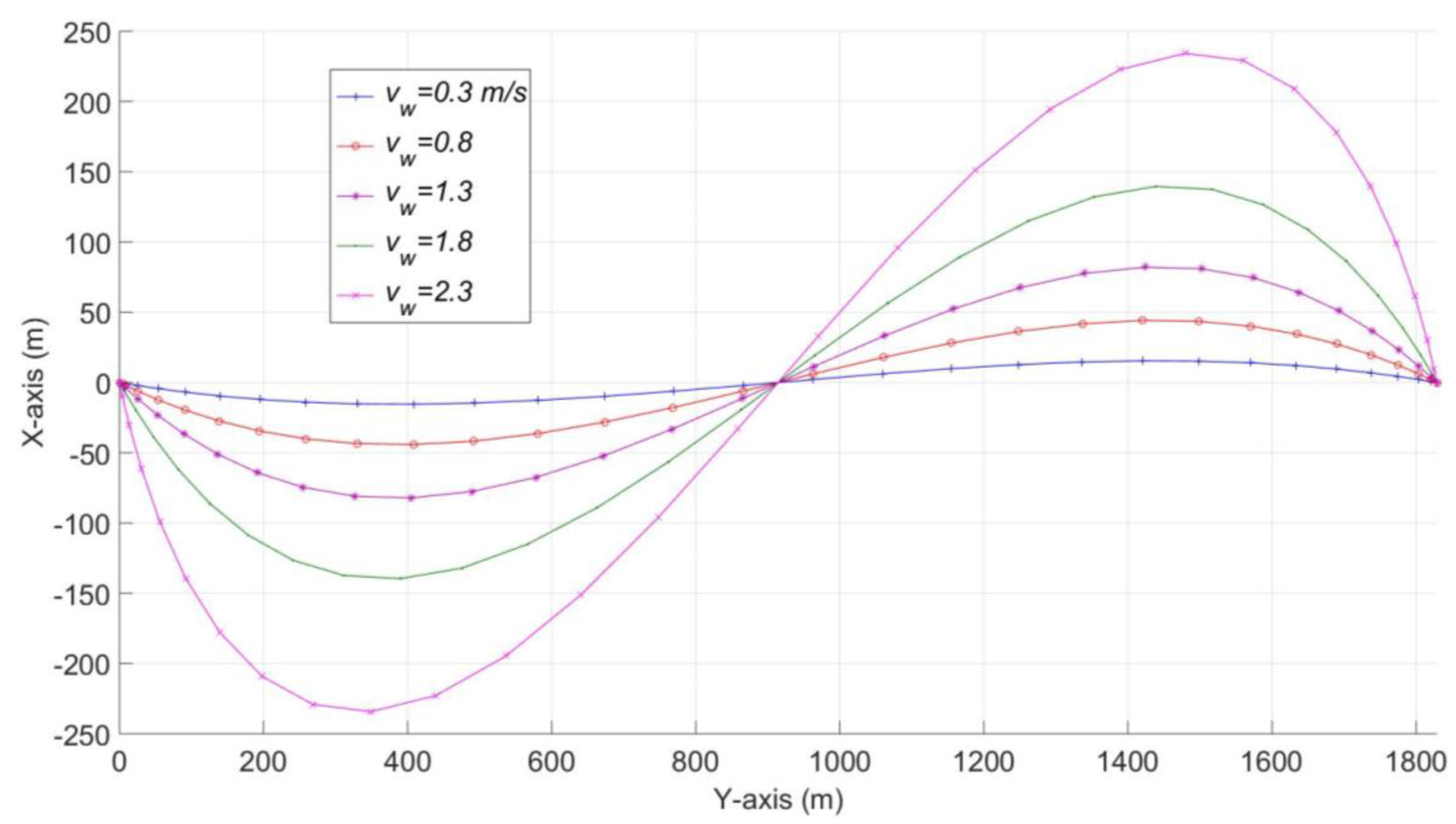
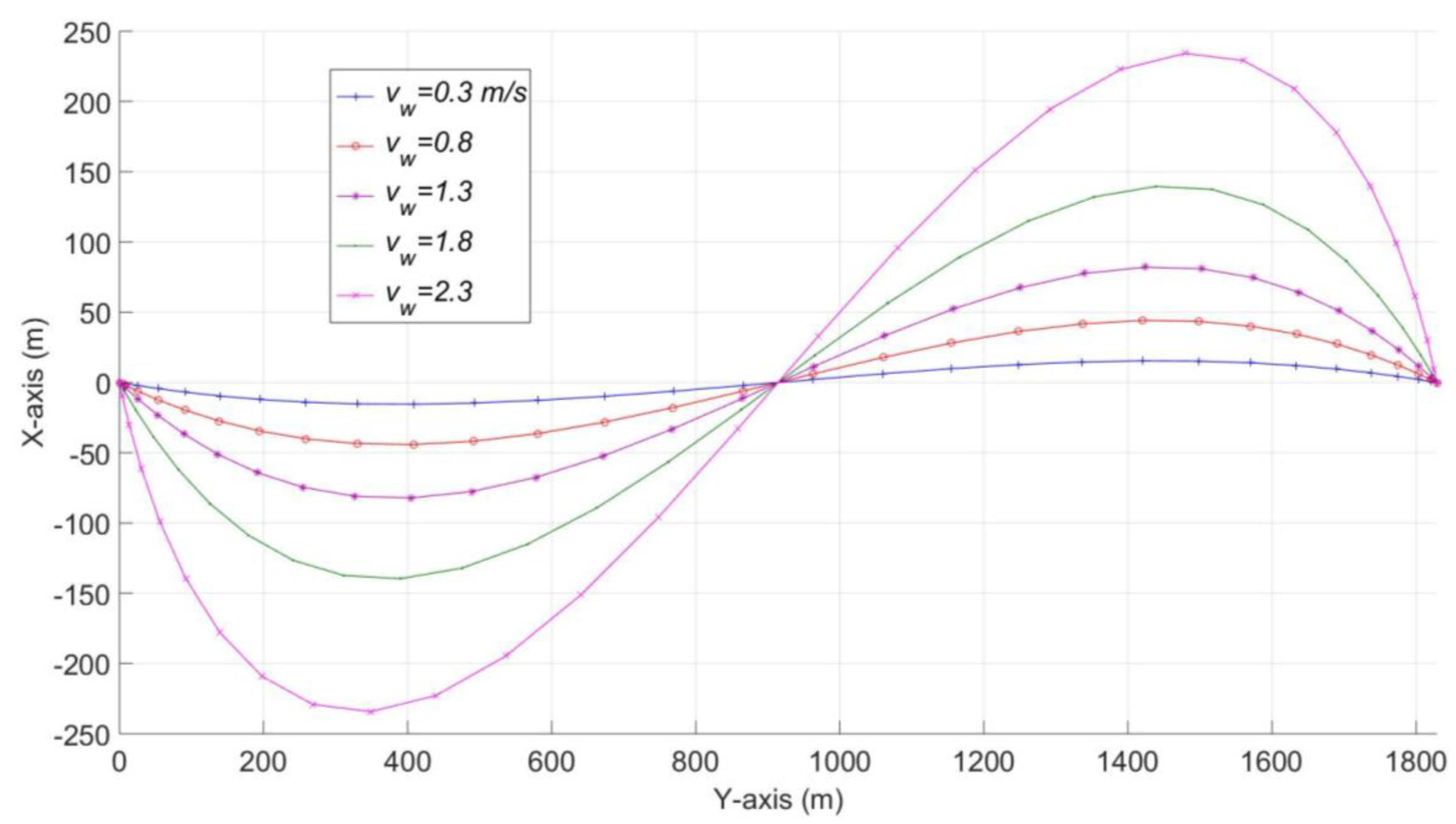
The parabolic flow profile has the same properties as the piecewise-linear and allows for a smooth flow rate:
In this case, using Equations (7) and (12), we include both “time” and “accuracy” objectives. The adjoint equations are as follows:
For current in the direction of the unit vector
i with parabolic profile:
For the
r = 0 “minimum time” case, the adjoint equations become:
Since Equations (21) and (22) are, respectively, coupled to Equation (2), the above equations cannot be solved analytically. The authors investigate “minimum time” paths for various parabolic profiles and then weigh “time” versus “accuracy” using the numerical optimization tool DIDO.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}