Psychophysiological Methods to Evaluate User’s Response in Human Robot Interaction: A Review and Feasibility Study

Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Psychophysiology for Human Studies
3. Common Psychophysiological Measures in HRI
3.1. Cardiovascular Activity
3.2. Electrodermal Activity
- (1)
- the tonic component (Skin Conductance Level) is the absolute value of the skin conductance at a given moment in absence of a specific stimulus onset. So-called nonspecific skin conductance responses also occur in absence of specific (individual) emotional stimuli, with their frequency proportional to arousal.
- (2)
- the phasic component (Skin Conductance Response) is the response to an emotional stimulus.
3.3. Electromyography Activity
3.4. Brain Activity
4. Psychophysiology Applied in HRI Studies: An Overview
4.1. Psychophysiological Studies Evaluating Humans’ Response to Robots
4.2. fMRI Studies Evaluating Humans’ Responses to Robots
5. Using Psycho-Physiological Measures to Evaluate Older Adults’ Response to a Telepresence Robot: A Feasibility Study
5.1. Apparatus

5.2. Physiological Parameters
5.3. Subjective Measures
- (1)
- The State-Trait Anxiety Inventory [103] (STAI). It is a self-report questionnaire consisting of two scales (Y1 for state anxiety and Y2 for trait anxiety) containing 20 items each. All items are rated on a 4-point scale (i.e., from 1= almost never, to 4= almost always).
- (2)
- The Positive and Negative Affect Schedule [93] (PANAS). It consists of two scales containing 10 items each, onemeasuring positive affect and the other measuring negativeaffect. Each item is rated on a 5-point scale (i.e., from 1 =very slightly or not at all, to 5 = extremely).
- (3)
- A concluding interview on the robot experience wasadministered in order to get information about: social presence (“I had the feeling that the investigator was in the same place where I was”), utility and advantages of the robot (“I think that Giraff could be useful in the home”), engagement (“I felt physically involved in the experience with Giraff”), physical aspect of the robot (“Giraff is pleasing to see”), privacy issues (“It may be annoying to receive virtual visits through the Giraff at home”).
5.4. Participants
- (1)
- Normal control group (NC), which consisted of 9 participants (age 70 ± 4.3 years, age range 65–75, 6 males, 3 females) with no cognitive impairment. Subjects were tested with the Mini-Mental State Examination (MMSE) reporting a score of 30. Mean score on Trait Anxiety scale (Y2) was 32.3 (with Spielberger’s recommended cut-off of 39/40 [82]).
- (2)
- MCI group, which consisted of 8 participants (age 73.5 ± 5.2 years, age range 65–79, 5 males, 3 females). MCIs were assessed by a battery of standardized neuropsychological tests and their score on MMSE was between 25 and 30 (mean 27 ± 1.18). Mean score on Trait Anxiety scale (Y2) was 34.5 (with Spielberger’s recommended cut-off of 39/40 [82]).
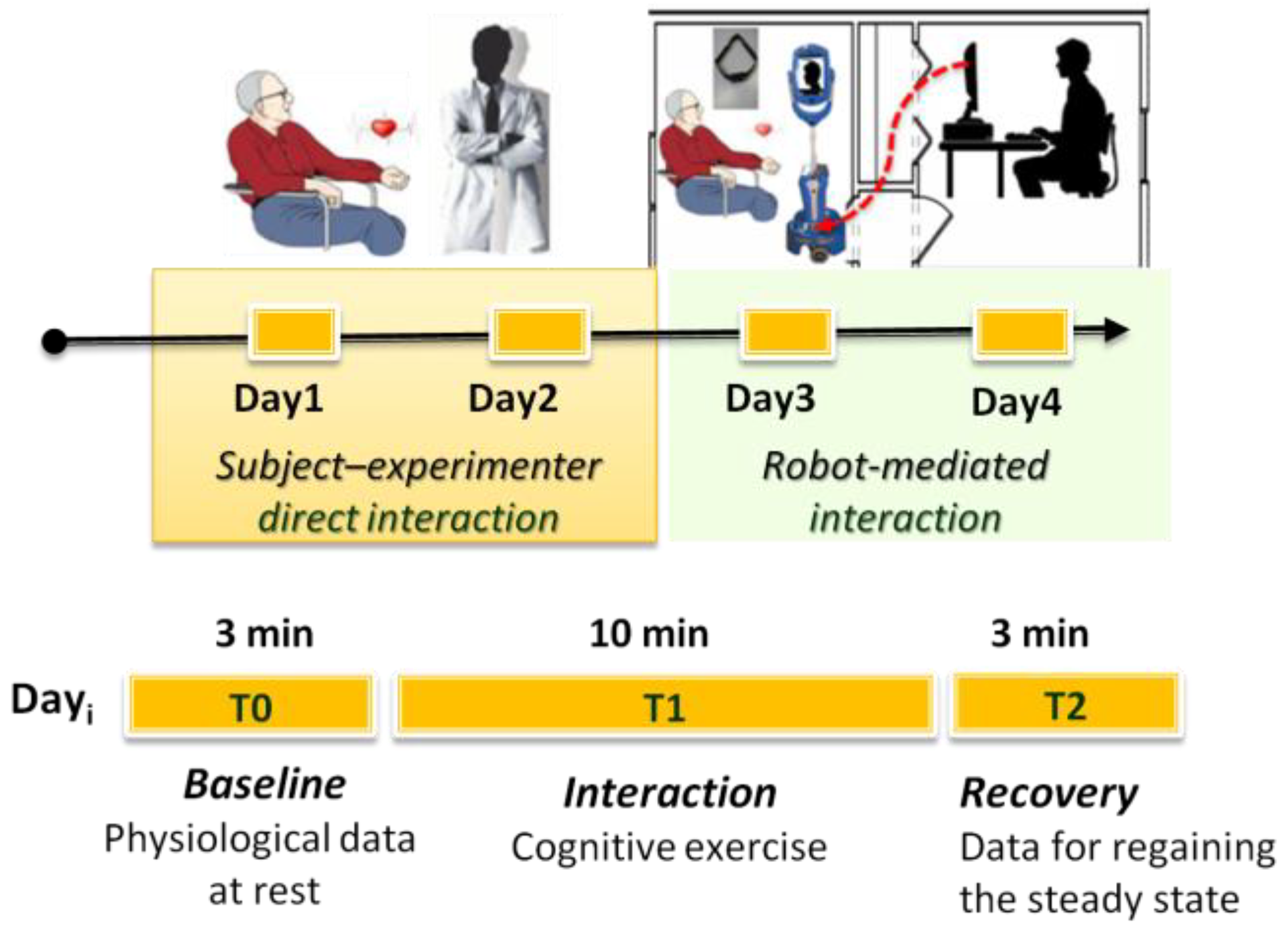
5.5. Procedure
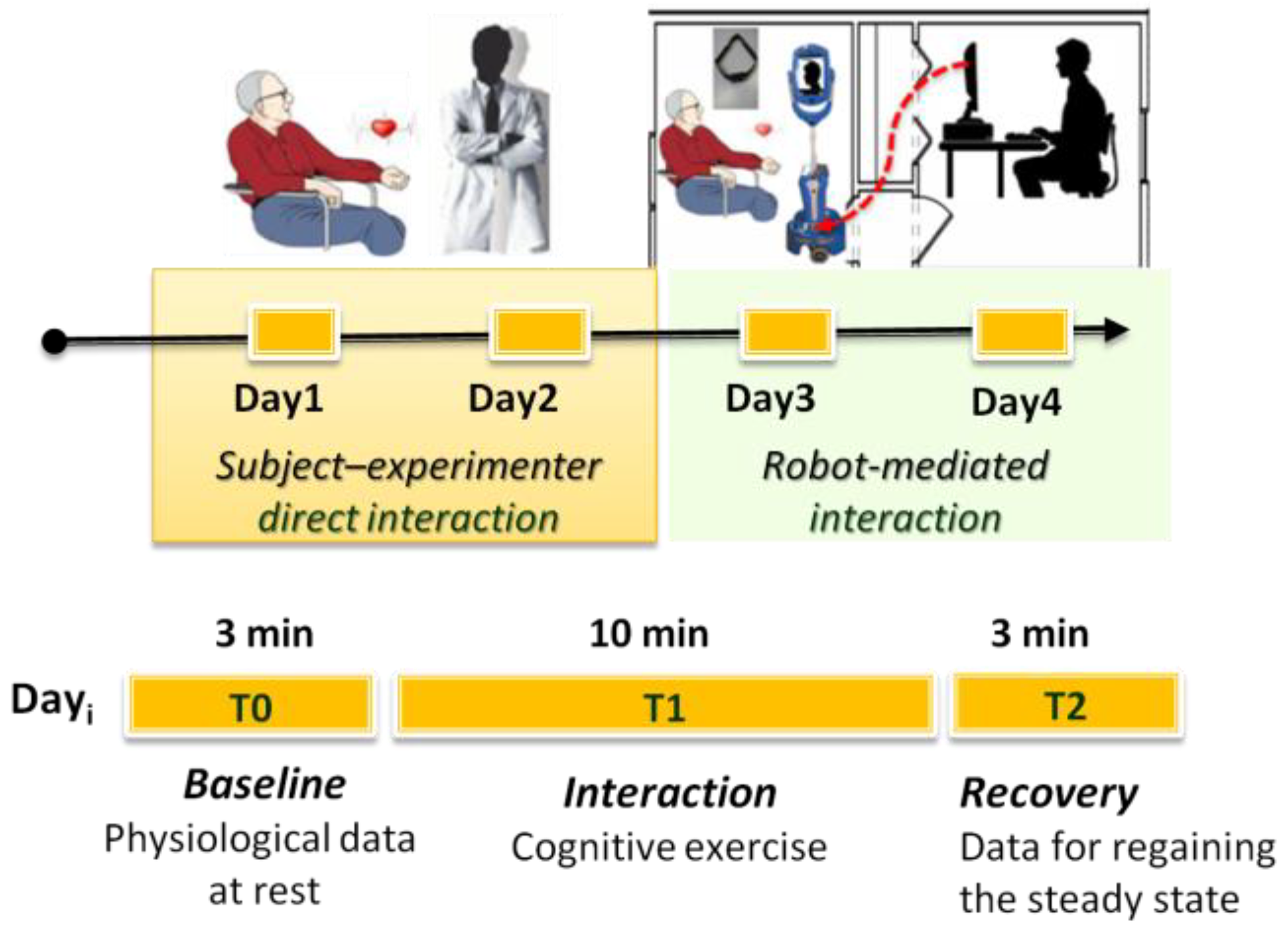
- (1)
- directly with the human experimenter during the first two sessions;
- (2)
- through the telepresence robot during the subsequent two sessions.
Cognitive Stimulation Tasks
- (1)
- Word list memory: a list of 10 words is read to the subject at a constant rate of 1 word every 2 s. The word list is presented 3 times to the subject. At the end of each of the 3 presentations, the subject is asked to recall the list of words.
- (2)
- Verbal fluency test: subject is asked to name in one minute a list of words within a specific semantic (e.g., vegetables or professions) or phonetic category (words that begin with letter F, A, and S).
- (3)
- Story recall: the participants are asked to memorize the story once and then to complete an immediate recall test, at the end of the Interaction Phase.
- (4)
- Digit span Forward / Backward: in the forward digit-span task a series of numbers (e.g., 7–3–9) are presented to the subjects and they have to immediately repeat them back in the given order. If they do this successfully, they are given a longer list. In the backward digit-span task the participant needs to reverse the order of the numbers.
- (5)
- Numerical and abstract reasoning: in the first case participants are asked to resolve simple operations in addition, subtraction, multiplication or division; for the abstract reasoning subjects have to interpret some popular proverbs.
5.6. Results
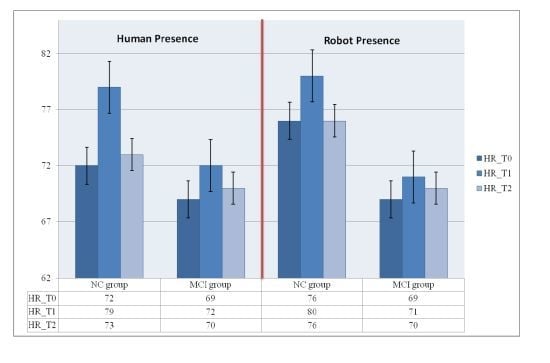
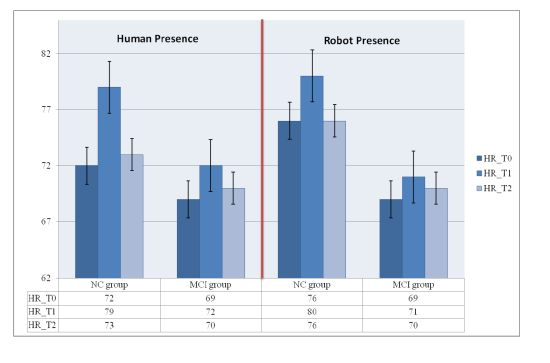
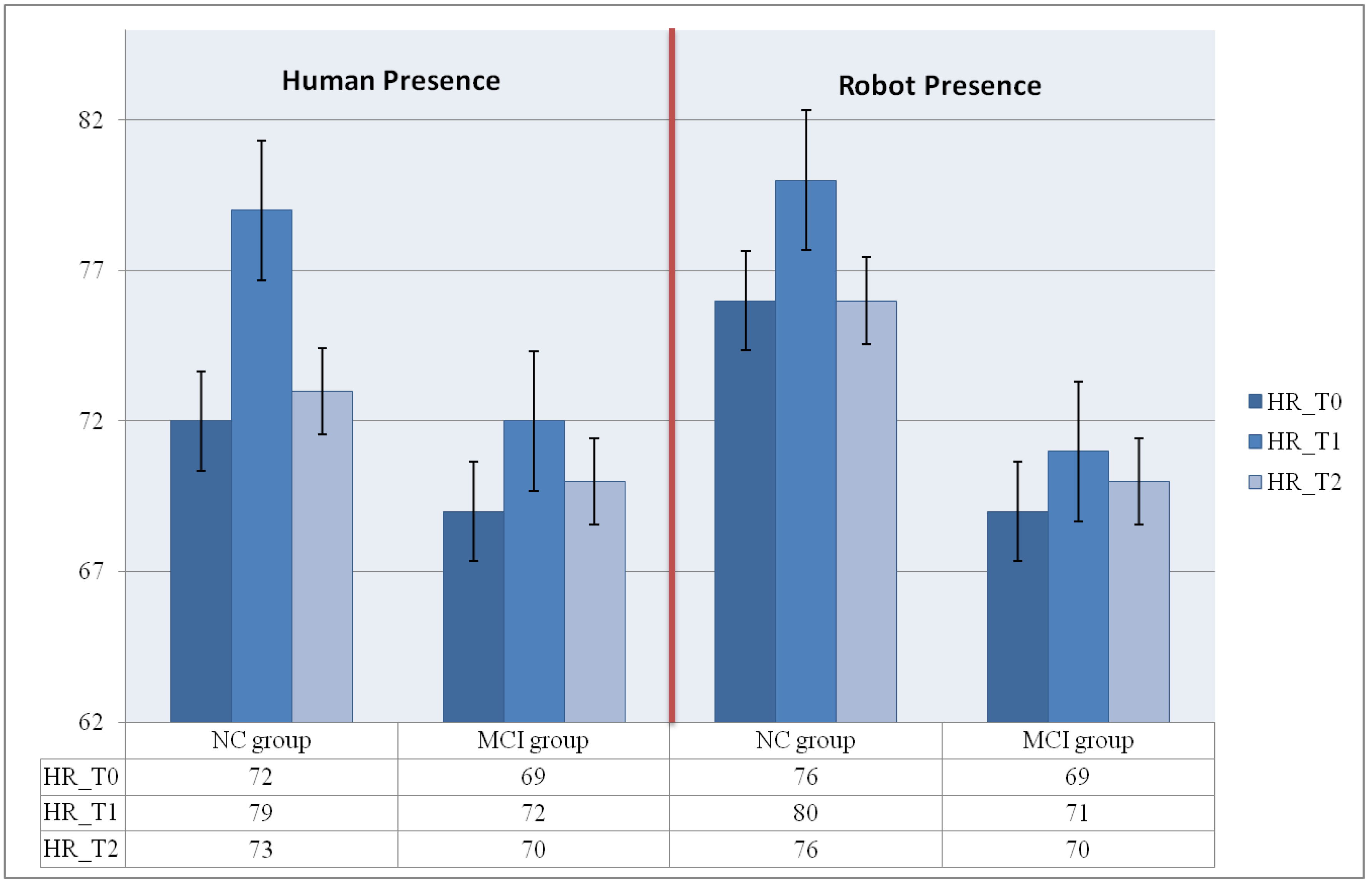
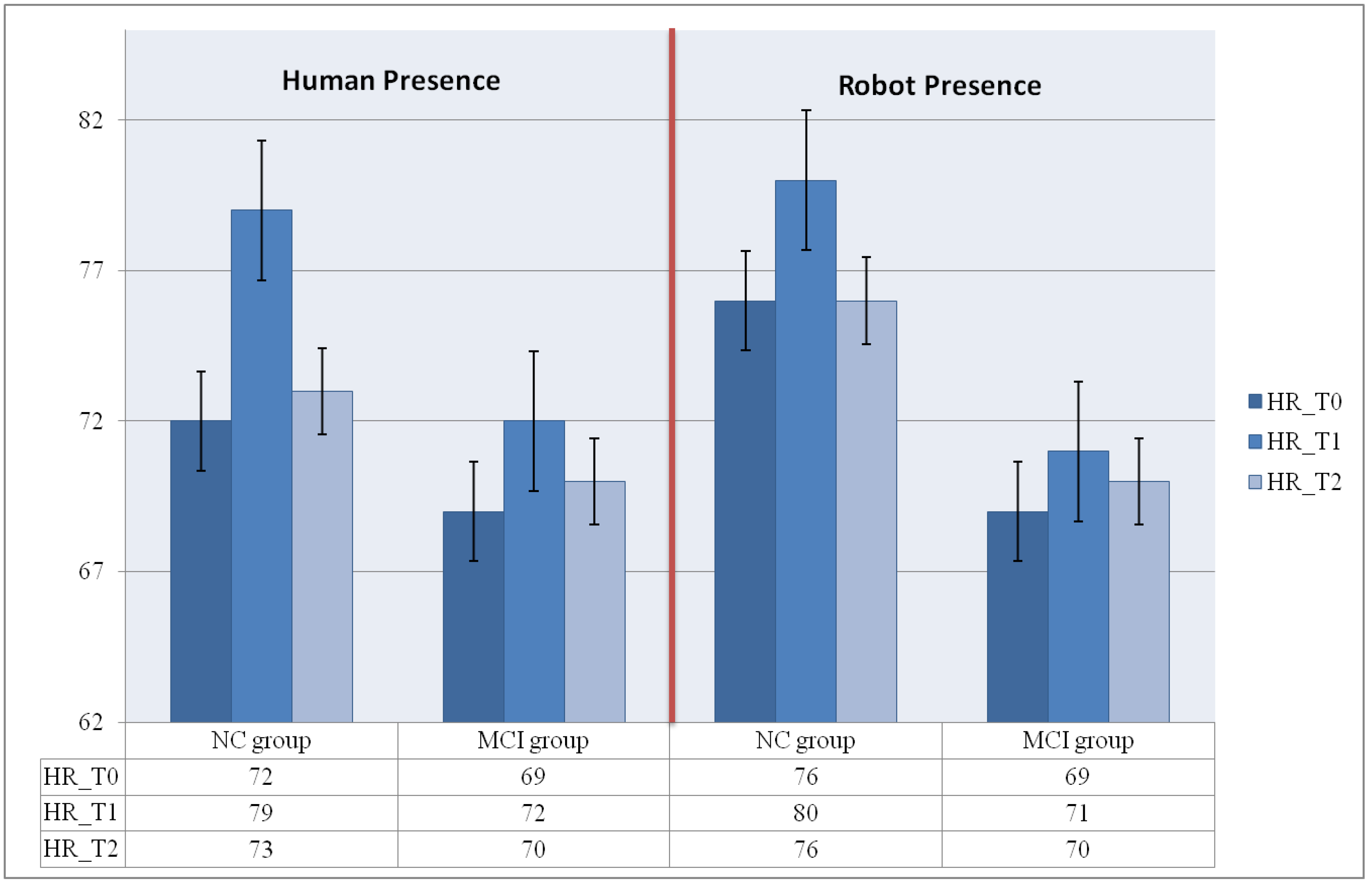
5.6.1. Heart Rate
5.6.2. Heart Rate Variability
5.6.3. Subjective Measures
5.6.4. Summary and Discussion of Results of the Study
6. Some Lessons Learned from the Literature
7. Conclusions
Acknowledgments
References
- Breazeal, C. Towards sociable robots. Robot. Auton. Syst. 2003, 42, 167–175. [Google Scholar] [CrossRef]
- Forlizzi, J.; di Salvo, C. Service Robots in the Domestic Environment: A Study of the Roomba Vacuum in the Home. In Proceedings of the 1st Annual Conference on Human-Robot Interaction, Salt Lake City, UT, USA, March 2006; pp. 258–265.
- Reeves, B.; Nass, C. The Media Equation; CSLI Publications: Cambridge, UK, 1996. [Google Scholar]
- Sung, J.Y.; Guo, L.; Grinter, R.E.; Christensen, H.I. My roomba is rambo: Intimate home appliances. Ubiquitous Comp. 2007, 4717, 145–162. [Google Scholar]
- Broekens, J.; Heerink, M.; Rosendal, H. Assistive social robots in elderly care: A review. Gerontechnology 2009, 8, 94–103. [Google Scholar]
- Feil-Seifer, D.; Mataric, M.J. Defining Socially Assistive Robotics. In Proceedings of the IEEE International Conference on Rehabilitation Robotics, Chicago, IL, USA, 28 June–1 July 2005; pp. 465–468.
- Gross, H.-M.; Schröter, C.H.; Müller, S.; Volkhardt, M.; Einhorn, E.; Bley, A.; Langner, T.; Merten, M.; Huijnen, C.; van den Heuvel, H.; et al. Further Progress towards a Home Robot Companion for People with Mild Cognitive Impairment. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics (IEEE-SMC 2012), Seoul, Korea, 14–17 October 2012; pp. 637–644.
- Bethel, C.L.; Salomon, K.; Murphy, R.R.; Burke, J.L. Survey of Psychophysiology Measurements Applied to Human-Robot Interaction. In Proceedings of the 16th IEEE International Symposium on Robot & Human Interactive Communication, Jeju Island, Korea, 26–29 August 2007.
- Dautenhahn, K. Socially intelligent robots: Dimensions of human-robot interaction. Philos. Trans. Roy. Soc. Biol. Sci. 2007, 362, 679–704. [Google Scholar] [CrossRef]
- Fong, T.; Nourbakhsh, I.; Dautenhahn, K. A survey of socially interactive robots. Rob. Auton. Syst. 2003, 42, 143–166. [Google Scholar] [CrossRef]
- Cacioppo, J.T.; Berntson, G.G.; Klein, D.J.; Poehlmann, K.M. The psychophysiology of emotion across the lifespan. Annu. Rev. Gerontol. Geriatr. 1997, 17, 27–74. [Google Scholar]
- Hagemann, D.; Waldstein, S.; Thayer, J.F. Central and autonomic nervous system integration in emotion. Brain Cogn. 2003, 52, 79–87. [Google Scholar] [CrossRef]
- Oatley, K.; Keltner, D.; Jenkins, J.M. Understanding Emotions, 2nd ed; Wiley-Blackwell Publishing: Oxford, UK, 2006. [Google Scholar]
- Swangnetr, M. Analysis of Patient-Robot Interaction Using Statistical and Signal Processing Methods. Ph.D. Thesis, North Carolina State University, Raleigh, NC, USA, 2010. [Google Scholar]
- Russell, J.A. A circumplex model of affect. J. Pers. Soc. Psychol. 1980, 39, 1151–1178. [Google Scholar]
- Morris, J.D. SAM: The self-assessment manikin. An efficient cross-cultural measurement of emotional response. J. Advert. Res. 1995, 35, 63–68. [Google Scholar]
- Cacioppo, J.T.; Tassinary, L.G. Psychophysiology and psychophysiological inference. In Principles of Psychophysiology; Cacioppo, J.T., Tassinary, L.G., Eds.; Cambridge University Press: Cambridge, UK, 1990; pp. 3–33. [Google Scholar]
- Dirican, A.C.; Göktürk, M. Psychophysiological measures of human cognitive states applied in human computer interaction. Procedia Comput. Sci. 2011, 3, 1361–1367. [Google Scholar] [CrossRef]
- Kulić, D.; Croft, E. Affective state estimation for human-robot interaction. IEEE Trans. Robot. 2007, 23, 991–1000. [Google Scholar] [CrossRef]
- Gevins, A.; Smith, M.E. Neurophysiological measures of cognitive workload during human-computer interaction. Theor. Issues Ergon. Sci. 2003, 4, 113–131. [Google Scholar] [CrossRef]
- Van Reekum, C.M.; Johnstone, T.; Banse, R.; Etter, A.; Wehrle, T.; Scherer, K.R. Psychophysiological responses to appraisal dimensions in a computer game. Cogn. Emotion 2004, 18, 663–668. [Google Scholar] [CrossRef]
- Mandryk, R.L.; Atkins, M.S. A fuzzy physiological approach for continuously modeling emotion during interaction with play technologies. Int. J. Hum. Comp. Stud. 2007, 65, 329–347. [Google Scholar] [CrossRef]
- Wilson, G.M.; Sasse, M.A. Investigating the Impact of Audio Degradations on Users: Subjective vs. Objective Assessment Methods. In Proceedings of OZCHI 2000: Interfacing Reality in the New Millennium, Sydney, Australia, 4–8 December 2000; pp. 135–142.
- Scheirer, J.; Fernandez, R.; Klein, J.; Picard, R. Frustrating the user on purpose: A step toward building an affective computer. Interact. Comp. 2002, 14, 93–118. [Google Scholar] [CrossRef]
- Barlett, C.P.; Anderson, C.A.; Swing, E.L. Video game effects—Confirmed, suspected, and speculativ. A review of the evidence. Simul. Gam. 2009, 40, 377–403. [Google Scholar] [CrossRef]
- Hebert, S.; Beland, R.; Dionne-Fournelle, O.; Crete, M.; Lupien, S.J. Physiological stress response to video-game playing: The contribution of built-in music. Life Sci. 2005, 76, 2371–2380. [Google Scholar] [CrossRef]
- Ravaja, N.; Saari, T.; Salminen, M.; Laarni, J.; Holopainen, J.; Järvinen, A. Emotional Response Patterns and Sense of Presence during Video Games: Potential Criterion Variables for Game Design. In Proceedings of the NordiCHI 2004, Tampere, Finland, 26–27 October 2004; pp. 339–347.
- Mandryk, R.L.; Atkins, M.S.; Inkpen, K.M. A Continuous and Objective Evaluation of Emotional Experience with Interactive Play Environments. In Proceedings of the Conference on Human Factors in Computing Systems (CHI 2006), Montreal, QC, Canada, 24–27 April 2006; pp. 1027–1036.
- Kivikangas, M.; Chanel, G.; Cowley, B.; Ekman, I.; Salminen, M.; Järvelä, S.; Ravaja, N. A review of the use of psychophysiological methods in game research. J. Gam. Virt. Worlds 2011, 3, 181–199. [Google Scholar]
- Kidd, C.D.; Breazeal, C. Human-Robot Interaction Experiments: Lessons Learned. In Proceedings of the AISB’05 Symposium Robot Companions: Hard Problems and Open Challenges in Robot-Human Interaction, Hertfordshire, UK, 14–15 April 2005; pp. 141–142.
- Steinfeld, A.; Fong, T.; Kaber, D.; Lewis, M.; Scholtz, J.; Schultz, A.; Goodrich, M. Common Metrics for Human-Robot Interaction. In Proceedings of the 1st ACM SIGCHI/SIGART Conference on Human-Robot Interaction, Salt Lake City, UT, USA, 2–3 March 2006.
- Bethel, C.L.; Salomon, K.; Burke, J.L.; Murphy, R.R. Psychophysiological Experimental Design for Use in Human-Robot Interaction Studies. In Proceedings of the 2007 International Symposium on Collaborative Technologies and Systems (CTS 2007), Orlando, FL, USA, 25–26 May 2007.
- Borod, J.C.; Bloom, R.L.; Brickman, A.M.; Nakhutina, L.; Curko, E.A. Emotional processing deficits in individuals with unilateral brain damage. Emotional processing deficits in individuals with unilateral brain damage. Appl. Neuropsychol. Adult 2002, 9, 23–36. [Google Scholar] [CrossRef]
- Demaree, H.A.; Everhart, D.E.; Youngstrom, E.A.; Harrison, D.W. Brain lateralization of emotional processing: Histrical roots and a future incorporating dominance. Behav. Cognit. Neurosci. Rev. 2005, 4, 3–20. [Google Scholar] [CrossRef]
- Cacioppo, J.T.; Berntson, G.G.; Larsen, J.T.; Poehlmann, K.M.; Ito, T.A. The psychophysiology of emotion. In The Handbook of Emotion, 2nd; Lewis, R., Haviland-Jones, J.M., Eds.; Guilford Press: New York, NY, USA, 2000; pp. 173–191. [Google Scholar]
- Ruediger, H.; Seibt, R.; Scheuch, K.; Krause, M.; Alam, S.S. Sympathetic and parasympathetic activation in heart rate variability in male hypertensive patients under mental stress. J. Hum. Hypert. 2004, 18, 307–315. [Google Scholar] [CrossRef]
- Thayer, J.F.; Ahs, F.; Fredrickson, M.; Sollers, J.J.; Wager, T.D. A meta-analysis of heart rate variability and neuroimaging studies: Implications for heart rate variability as a marker of stress and health. Neurosci. Biobehav. Rev. 2012, 36, 747–756. [Google Scholar] [CrossRef]
- Joyner, J.M.; Charkoudian, N.; Wallin, B.G. A sympathetic view of the sympathetic nervous system and human blood pressure regulation. Exp. Physiol. 2008, 93, 715–724. [Google Scholar] [CrossRef]
- Acharya, R.U.; Joseph, P.K.; Kannathal, N.; Lim, C.M.; Suri, J.S. Heart rate variability: A review. Med. Biol. Eng. Comp. 2006, 44, 1031–1051. [Google Scholar]
- Rainville, P.; Bechara, A.; Naqvi, N.; Damasio, A.R. Basic emotions are associated with distinct patterns of cardiorespiratory activity. Int. J. Psychophysiol. 2006, 61, 5–18. [Google Scholar] [CrossRef]
- Thérèse, J.M.O.; van de Boxtel, A.; Westerink, D.M. Respiratory sinus arrhythmia responses to induced emotional states: Effects of RSA indices, emotion induction method, age, and sex. Biol. Psychol. 2012, 91, 128–141. [Google Scholar] [CrossRef]
- Park, B. Psychophysiology as a Tool for HCI Research: Promises and Pitfalls. In Proceedings of the 13th International Conference on Human-Comput er Interaction Part I: New Trends, San Diego, CA, USA, 19–24 July 2009; pp. 141–148.
- Wilson, G. Operator functional state assessment for adaptive automation implementation. In Biomonitoring for Physiological and Cognitive Performance during Military Operations; Caldwell, J.A., Wesensten, N.J., Eds.; SPIE: Orlando, FL, USA; pp. 100–104.
- Blechert, J.; Lajtman, M.; Michael, T.; Margraf, J.; Wilhelm, F.H. Identifying anxiety states using broad sampling and advanced processing of peripheral physiological information. Biomed. Sci. Instrum. 2006, 42, 136–141. [Google Scholar]
- Etzel, J.A.; Johnsen, E.L.; Dickerson, J.A.; Tranel, D.; Adolphs, R. Cardiovascular and respiratory responses during musical mood induction. Int. J. Psychophysiol. 2006, 61, 57–69. [Google Scholar] [CrossRef]
- Khalfa, S.; Roy, M.; Rainville, P.; Bella, S.D.; Peretz, I. Role of tempo entrainment in psychophysiological differentiation of happy and sad music? Int. J. Psychophysiol. 2008, 68, 17–26. [Google Scholar] [CrossRef]
- Murakami, H.; Ohira, H. Influence of attention manipulation on emotion and autonomic responses. Percept. Motor Skills 2007, 105, 299–308. [Google Scholar]
- Pauls, C.A.; Stemmler, G. Repressive and defensive coping during fear and anger. Emotion 2003, 3, 284–302. [Google Scholar]
- Stern, R.M.; Ray, W.J.; Quigley, K.S. Psychophysiological Recording, 2nd ed; Oxford University Press: New York, NY, USA, 2001. [Google Scholar]
- Benedek, M.; Kaerbach, C. A continuous measure of phasic electrodermal activity. J. Neurosci. Method 2010, 190, 80–91. [Google Scholar] [CrossRef]
- Dawson, M.E.; Schell, A.M.; Filion, D.L. The electrodermal system. In Handbook of Psychophysiology, 2nd; Cacippo, J.T., Tassinary, L.G., Berntson, G.G., Eds.; Cambridge University Press: Cambridge, UK, 2000; pp. 200–223. [Google Scholar]
- Ritz, T.; Steptoe, A.; Wilde, S.D.; Costa, M. Emotions and stress increase respiratory resistance in asthma. Psychos. Med. 2000, 62, 401–412. [Google Scholar]
- Stemmler, G.; Heldmann, M.; Pauls, C.A.; Scherer, T. Constraints for emotion specificity in fear and anger: The context counts. Psychophysiology 2001, 38, 275–291. [Google Scholar] [CrossRef]
- Haapalainen, E.; Kim, S.J.; Forlizzi, J.F.; Dey, A.K. Psycho-Physiological Measures for Assessing Cognitive Load. In Proceedings of the 12th ACM International Conference on Ubiquitous Computing, Copenhagen, Denmark, 26–29 September 2010; pp. 301–310.
- Shi, Y.; Ruiz, N.; Taib, R.; Choi, E.; Chen, F. Galvanic Skin Response (GSR) as an Index of Cognitive Load. Ext. Abstracts CHI 2007; ACM Press: New York, NY, USA, 2007; pp. 2651–2656. [Google Scholar]
- Raez, M.B.I.; Hussain, M.S.; Mohd-Yasin, F. Techniques of EMG signal analysis: Detection, processing, classification and application. Biol. Proced. Online 2006, 8, 11–35. [Google Scholar]
- Neumann, D.L.; Westbury, H.R. The psychophysiological measurement of empathy. In Psychology of Empathy; Scapaletti, D.J., Ed.; Nova Science Publishers Inc.: Hauppauge, NY, USA, 2011; pp. 119–142. [Google Scholar]
- Dimberg, U.; Thunberg, M.; Grunedal, S. Facial reactions to emotional stimuli: Automatically controlled emotional responses. Cogn. Emotion 2002, 16, 449–471. [Google Scholar] [CrossRef]
- Wied, M.A.; van de Boxtel, A.; Zaalberg, R.; Goudena, P.P.; Matthys, W.C.H.J. Facial EMG responses to dynamic emotional facial expressions in boys with disruptive behavior disorders. J. Psychiatr. Res. 2006, 40, 112–121. [Google Scholar] [CrossRef]
- Dimberg, U.; Thunberg, M.; Elmehed, K. Unconscious facial reactions to emotional facial expressions. Psychol. Sci. 2000, 11, 86–89. [Google Scholar] [CrossRef]
- Davidson, R.J.; Pizzagalli, D.; Nitschke, J.B.; Putnam, K.M. Depression: Perspectives from affective neuroscience. Annu. Rev. Psychol. 2002, 53, 545–574. [Google Scholar] [CrossRef]
- Coan, J.A.; Allen, J.J.B. Frontal EEG asymmetry as a moderator and mediator of emotion. Biol. Psychol. 2004, 67, 7–49. [Google Scholar] [CrossRef]
- Engels, A.S.; Heller, W.; Mohanty, A.; Herrington, J.D.; Banich, M.T.; Webb, A.G.; Miller, G.A. Specificity of regional brain activity in anxiety types during emotion processing. Psychophysiology 2007, 44, 352–363. [Google Scholar] [CrossRef]
- Nitschke, J.B.; Heller, W.; Miller, G.A. Anxiety, Stress, and Cortical Brain Function. In The Neuropsychology of Emotions; Borod, J.C., Ed.; Oxford University Press: New York, NY, USA, 2000; pp. 298–319. [Google Scholar]
- Chaouachi, M.; Jraidi, I.; Frasson, C. Modeling mental workload using eeg features for intelligent systems. User modeling, adaption and personalization. Lect. Note. Comput. Sci. 2011, 6787, 50–60. [Google Scholar] [CrossRef]
- Wilson, G.F. An analysis of mental workload in pilots during flight using multiple psychophysiological measures. Int. J. Aviat. Psychol. 2002, 12, 3–18. [Google Scholar] [CrossRef]
- Phan, K.L.; Wager, T.D.; Taylor, S.F.; Liberzon, I. Functional brain imaging studies of human emotion. CNS Spectr. 2004, 9, 258–266. [Google Scholar]
- Saygin, A.P.; Chaminade, T.; Urgen, B.A.; Ishiguro, H. Cognitive neuroscience and robotics: A mutually beneficial joining of forces. In Robotics: Systems and Science; Takayama, L., Ed.; University of Southern California: Los Angeles, CA, USA, 2011. [Google Scholar]
- Dennett, D. The Intentional Stance; MIT Press: Cambridge, MA, USA, 1987. [Google Scholar]
- Kim, K.J.; Lipson, H. Towards a Simple Robotic Theory of Mind. In Proceedings of the 9th Workshop on Performance Metrics for Intelligent Systems, PerMIS 2009, Gaithersburg, MD, USA, 21–23 September 2009; pp. 131–138.
- Bonarini, A.; Mainardi, L.; Matteucci, M.; Tognetti, S.; Colombo, R. Stress Recognition in a Robotic Rehabilitation Task. In Proceedings of the Robotic Helpers: User Interaction, Interfaces and Companions in Assistive and Therapy Robotics, Amsterdam, the Netherlands, 12–15 March 2008.
- Kulić, D.; Croft, E.A. Anxiety Detection during Human-Robot Interaction. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; pp. 616–621.
- Kulic, D.; Croft, E. Estimating Intent for Human-Robot Interaction. In Proceedings of the 11th International Conference on Advanced Robotics, Coimbra, Portugal, 30 June–3 July 2003; pp. 810–815.
- Mower, E.; Feil-Seifer, D.J.; Mataric, M.J.; Narayanan, S. Investigating Implicit Cues for User State Estimation in Human-Robot Interaction Using Physiological Measurements. In Proceedings of the 16th IEEE International Symposium on Robot and Human Interactive Communication RO-MAN 2007, Jeju Island, Korea, 26–29 August 2007; pp. 1125–1130.
- Nasoz, F.; Alvarez, K.; Lisetti, C.L.; Finkelstein, N. Emotion recognition from physiological signals for presence technologies. Int. J. Cogn. Technol. Work 2003, 6, 1–14. [Google Scholar]
- Picard, R.W.; Vyzas, E.; Healy, J. Toward machine emotional intelligence: Analysis of affective psychological states. IEEE Trans. Pattern Anal. Mach. Intell. 2001, 23, 1175–1191. [Google Scholar] [CrossRef]
- Rani, P.; Sims, J.; Brackin, R.; Sarkar, N. Online stress detection using psychophysiological signals for implicit human-robot cooperation. Robotica 2002, 20, 672–685. [Google Scholar]
- Rani, P.; Sarkar, N. A new approach to implicit human-robot interaction using affective cues. In Mobile Robots, towards New Applications; Lazinica, A., Ed.; InTech: New York, NY, USA, 2006; pp. 233–252. [Google Scholar]
- Rani, P.; Sarkar, N.; Smith, C.A.; Adams, J.A. Affective Communication for Implicit Human-Machine Interaction. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics, Washington, DC, USA, 5–8 October 2003; Volume 5, pp. 4896–4903.
- Zhai, J.; Barreto, A.B.; Chin, C.; Chao, Li. Realization of Stress Detection Using Psychophysiological Signals for Improvement of Human-Computer Interactions. In Proceedings of the IEEE SoutheastCon 2005, Fort Lauderdale, FL, USA, 8–10 April 2005; pp. 415–420.
- Itoh, K.; Miwa, H.; Nukariya, Y.; Zecca, M.; Takanobu, H.; Roccella, S.; Carrozza, M.C.; Dario, P.; Atsuo, T. Development of a Bioinstrumentation System in the Interaction between a Human and a Robot. In Proceedings of the International Conference of Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 2620–2625.
- Badesa, F.J.; Morales, R.; Garcia-Aracil, N.; Sabater, J.M.; Perez-Vidal, C.; Fernandez, E. Multimodal interfaces to improve therapeutic outcomes in robot-assisted rehabilitation. IEEE Trans. Syst. Man Cybern. Appl. Rev. 2012, 42, 1152–1158. [Google Scholar]
- Guerrero, C.R.; Marinero, J.F.; Turiel, J.P.; Farina, P.R. Using Psychophysiological Feedback to Enhance Physical Human Robot Interaction in a Cooperative Scenario. In Proceedings of the 4th IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob), Roma, Italy, 24–27 June 2012; pp. 1176–1181.
- Koenig, A.; Novak, D.; Omlin, X.; Pulfer, M.; Perreault, E.; Zimmerli, L.; Mihelj, M.; Riener, R. Real-time closed-loop control of cognitive load in neurological patients during robot-assisted gait training. IEEE Trans. Neural Syst. Rehabil. Eng. 2011, 19, 453–464. [Google Scholar] [CrossRef]
- Liu, C.; Conn, K.; Sarkar, N.; Stone, W. Online affect detection and robot behavior adaptation for intervention of children with autism. IEEE Trans. Robot. 2008, 24, 883–896. [Google Scholar] [CrossRef]
- Rani, P.; Sarkar, N.; Smith, C.A.; Kirby, L.D. Anxiety detecting robotic system towards implicit human-robot collaboration. Robotica 2004, 22, 85–95. [Google Scholar] [CrossRef]
- Ganesh, M. Introduction to Fuzzy Sets and Fuzzy Logic; Prentice Hall of India: New Delhi, India, 2006. [Google Scholar]
- Dehais, F.; Sisbot, E-A.; Alami, R.; Causse, M. Physiological and subjective evaluation of a human-robot object hand over task. Appl. Ergon. 2011, 42, 785–791. [Google Scholar] [CrossRef]
- Goljar, N.; Javh, M.; Poje, J.; Ocepek, J.; Novak, D.; Ziherl, J.; Olenšek, A.; Mihelj, M.; Munih, M. Psychophysiological Responses to Robot Training in Different Recovery Phases after Stroke. In Proceedings of the IEEE International Conference on Rehabilitation Robotics (ICORR 2011), Zurich, Switzerland, 29 June–1 July 2011.
- Swangnetr, M.; Kaber, D.B. Emotional state classification in patient-robot interaction using wavelet analysis and statistics-based feature selection. IEEE Trans. Hum. Mach. Syst. 2013, 43, 63–75. [Google Scholar] [CrossRef]
- Zhang, T.; Kaber, D.B.; Zhu, B.; Swangnetr, M.; Mosaly, P.; Hodge, L. Service robot feature design effects on user perceptions and emotional responses. Intell. Serv. Robot. 2010, 3, 73–88. [Google Scholar] [CrossRef]
- Broadbent, E.; Lee, Y.I.; Stafford, R.Q.; Kuo, Y.H.; MacDonald, B.A. Mental schemas of robots as more human-like are associated with higher blood pressure and negative emotions in a human-robot interaction. Int. J. Soc. Robot 2011, 3, 291–297. [Google Scholar] [CrossRef]
- Watson, D.; Clark, L.A.; Tellegen, A. Development and validation of brief measures of positive and negative affect: The PANAS scales. J. Pers. Soc. Psychol. 1988, 54, 1063–1070. [Google Scholar] [CrossRef]
- Chaminade, T.; da Fonseca, D.; Rosset, D.; Lutcher, E.; Cheng, G.; Deruelle, C. FMRI Study of Young Adults with Autism Interacting with a Humanoid Robot. In Proceedings of the 21st IEEE International Symposium on Robot and Human Interactive Communication, Paris, France, 9–13 September 2012; pp. 380–385.
- Chaminade, T.; Zecca, M.; Blakemore, S.-J.; Takanishi, A.; Frith, C.D.; Micera, S.; Dario, P.; Rizzolatti, G.; Gallese, V.; Umità, M.A. Brain response to a humanoid robot in areas implicated in the perception of human emotional gestures. PLoS One 2010, 5. [Google Scholar] [CrossRef] [Green Version]
- Miura, N.; Sugiura, M.; Takahashi, M.; Moridaira, T.; Miyamoto, A.; Kuroki, Y.; Kawashima, R. An Advantage of Bipedal Humanoid Robot on the Empathy Generation: A Neuroimaging Study. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 2465–2470.
- Tiberio, L.; Cesta, A.; Cortellessa, G.; Padua, L.; Pellegrino, A.R. Assessing Affective Response of Older Users to a Telepresence Robot Using a Combination of Psychophysiological Measures. In Proceedings of the IEEE RO-MAN: The 21st IEEE International Symposium on Robot and Human Interactive Communication, Paris, France, 9–13 September 2012.
- Cesta, A.; Cortellessa, G.; Orlandini, A.; Tiberio, L. Addressing the Long-Term Evaluation of a Telepresence Robot for the Elderly; Joaquim, F., Ana, L.N., Eds.; SciTePress: Rome, Italy, 2012; pp. 652–663. [Google Scholar]
- Beer, J.; Takayama, L. Mobile Remote Presence Systems for Older Adults: Acceptance, Benefits, and Concerns. In Proceedings of the 6th International Conference on Human-Robot Interaction, Lausanne, Switzerland, 6–9 March 2011; pp. 19–26.
- Sharkey, A.; Sharkey, N. Children, the elderly, and interactive robots. IEEE Robot. Autom. Mag. 2011, 18, 32–38. [Google Scholar] [CrossRef]
- Giraff. Available online: http://www.giraff.org (accessed on 17 May 2013).
- ExCITE (Enabling SoCial Interaction Through Embodiment). Available online: http://www.oru.se/excite (accessed on 17 May 2013).
- Spielberger, C.D.; Gorsuch, R.L.; Lushene, R.E. Manual for the State-Trait Anxiety Inventory; Consulting Psychologists Press: Palo Alto, CA, USA, 1970. [Google Scholar]
- Davis, F.D. Perceived usefulness, perceived ease of use, and user acceptance of information technology. MIS Quart. 1989, 13, 319–340. [Google Scholar] [CrossRef]
- Tapus, A.; Matarić, M.J.; Scassellati, S. The grand challenges in socially assistive robotics. IEEE Robot. Autom. Mag. 2007, 14, 35–42. [Google Scholar]
- Kim, K.H.; Bang, S.W.; Kim, S.R. Emotion recognition system using short-term monitoring of physiological signals. Med. Biol. Eng. Comp. 2004, 42, 419–427. [Google Scholar] [CrossRef]
- Kreibig, S.D. Autonomic nervous system activity in emotion: A review. Biol. Psychol. 2010, 84, 394–421. [Google Scholar]
- Minato, T.; Shimada, M.; Itakura, S.; Lee, K.; Ishiguro, H. Evaluating the human likeness of an android by comparing gaze behaviors elicited by the android and a person. Adv. Robot. 2006, 20, 1147–1163. [Google Scholar] [CrossRef]
- Mori, M. The uncanny valley. Energy 1970, 74, 33–35. [Google Scholar]
- Czaja, S.; Charness, N.; Fisk, A.; Hertzog, C.; Nair, S.; Rogers, W.; Sharit, J. Factors predicting the use of technology: Findings from the center for research and education on aging and technology enhancement. Psychol. Aging 2006, 21, 333–352. [Google Scholar] [CrossRef]
- Novak, D.; Mihelj, M.; Ziherl, J.; Olensek, A.; Munih, M. Psychophysiological measurements in a biocooperative feedback loop for upper extremity rehabilitation. IEEE Trans. Neural Syst. Rehabil. Eng. 2011, 19, 400–410. [Google Scholar] [CrossRef]
- Fairclough, S.H. Fundamentals of physiological computing. Interact. Comp. 2009, 21, 133–145. [Google Scholar] [CrossRef]
- Novak, D.; Mihelj, M.; Munih, M. A survey of methods for data fusion and system adaptation using autonomic nervous system responses in physiological computing. Interact. Comput. 2012, 24, 154–172. [Google Scholar] [CrossRef]
- Fisher, R.J. Social desirability bias and the validity of indirect questioning. J. Consum. Res. 1993, 2, 303–315. [Google Scholar]
- Posner, J.; Russell, J.A.; Peterson, B.S. The circumplex model of affect: An integrative approach to affective neuroscience, cognitive development, and psychopathology. Dev. Psychopathol. 2005, 17, 715–734. [Google Scholar]
© 2013 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Tiberio, L.; Cesta, A.; Olivetti Belardinelli, M. Psychophysiological Methods to Evaluate User’s Response in Human Robot Interaction: A Review and Feasibility Study. Robotics 2013, 2, 92-121. https://doi.org/10.3390/robotics2020092
Tiberio L, Cesta A, Olivetti Belardinelli M. Psychophysiological Methods to Evaluate User’s Response in Human Robot Interaction: A Review and Feasibility Study. Robotics. 2013; 2(2):92-121. https://doi.org/10.3390/robotics2020092
Chicago/Turabian StyleTiberio, Lorenza, Amedeo Cesta, and Marta Olivetti Belardinelli. 2013. "Psychophysiological Methods to Evaluate User’s Response in Human Robot Interaction: A Review and Feasibility Study" Robotics 2, no. 2: 92-121. https://doi.org/10.3390/robotics2020092