Design and Optimization of Coupling Coils for Bidirectional Wireless Charging System of Unmanned Aerial Vehicle


Abstract
:1. Introduction
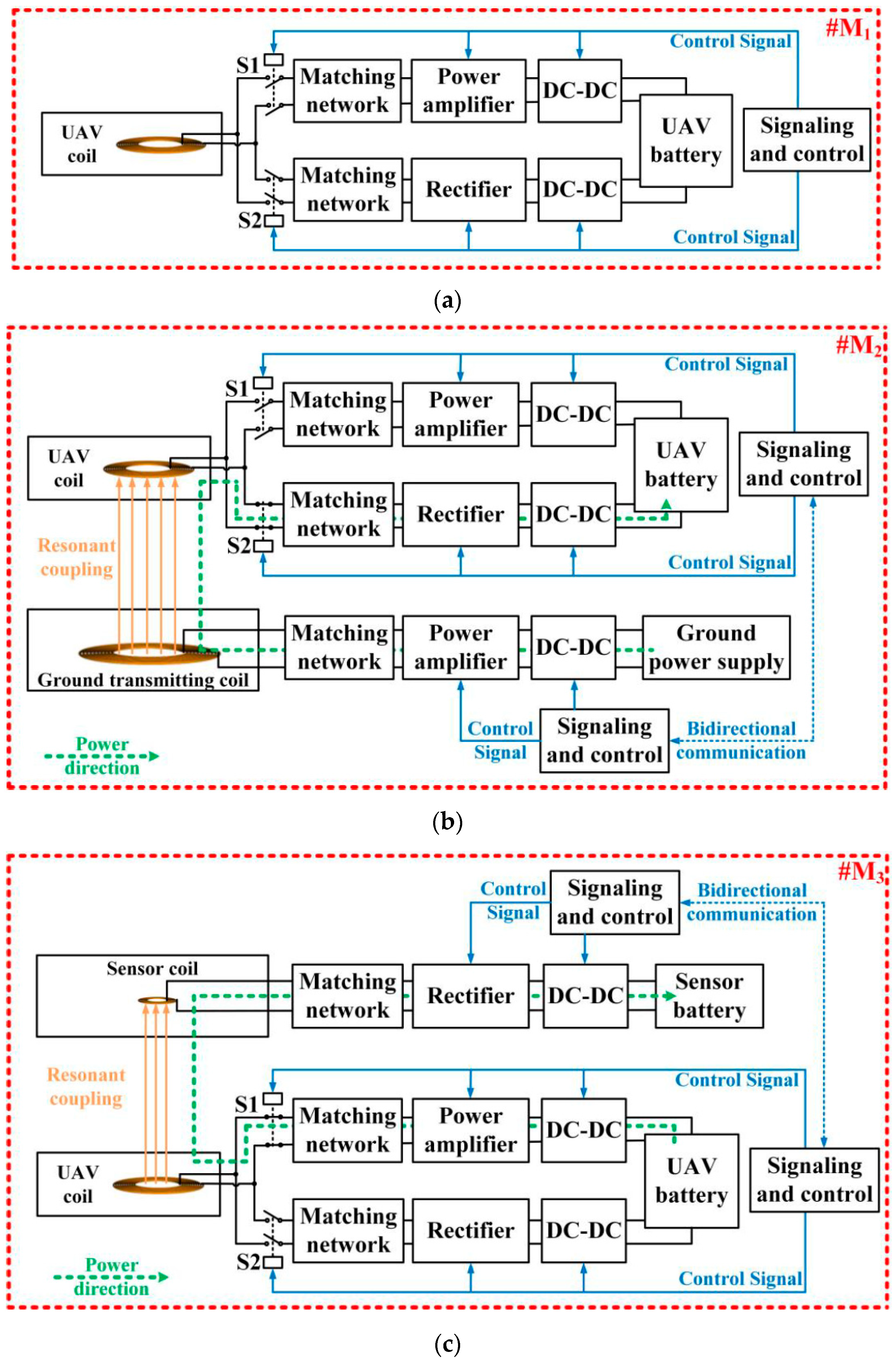
2. Bidirectional Wireless Charging System of UAV
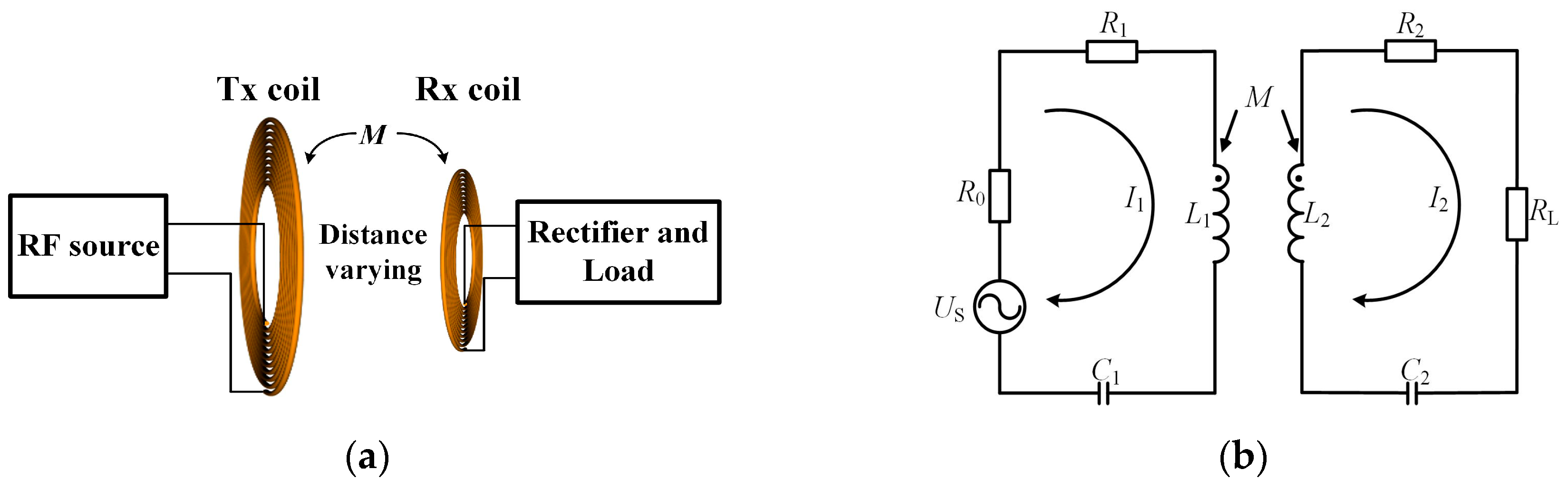
3. Design and Optimization of Coupling Coils
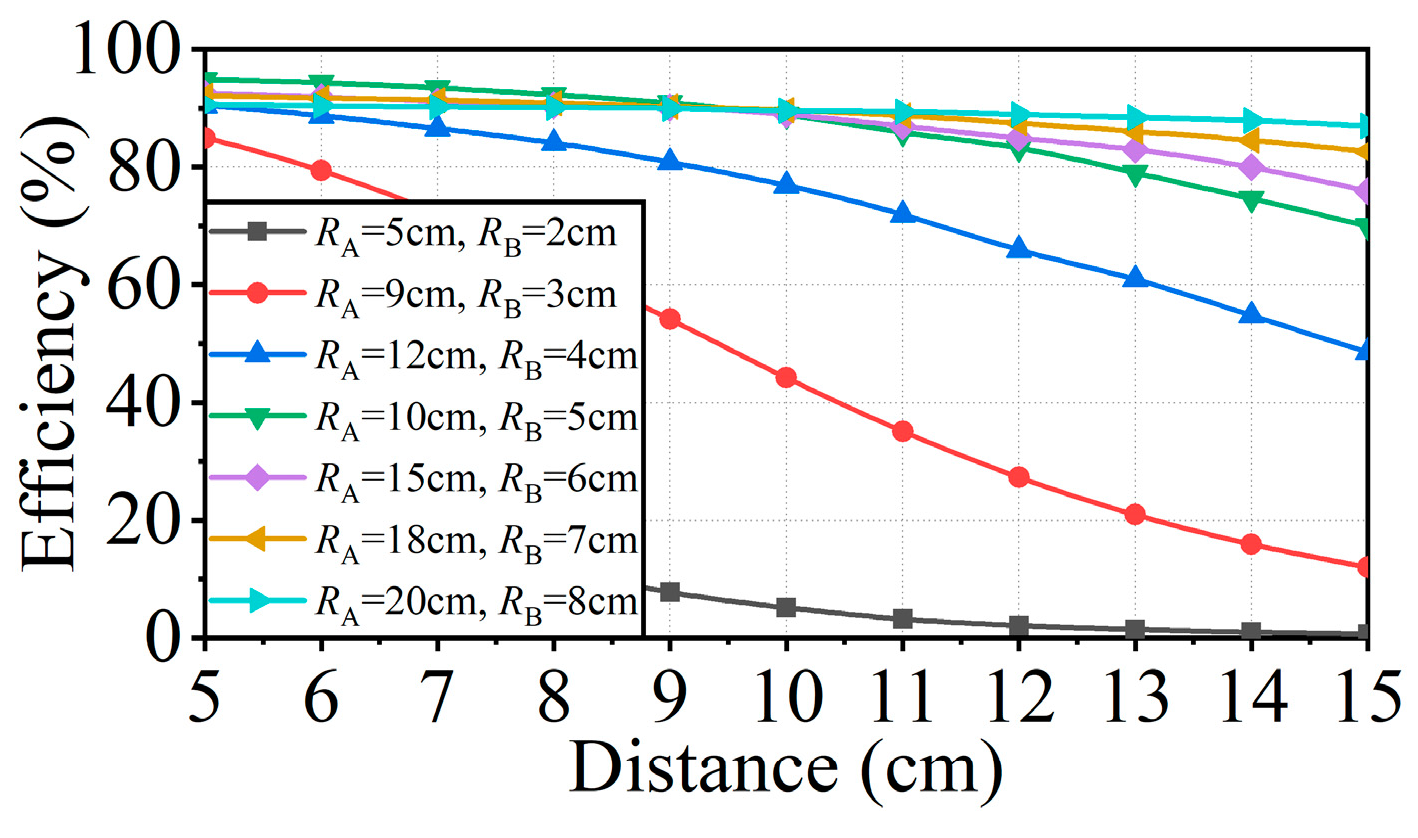
3.1. Desgin and Optimization of Coil Radius
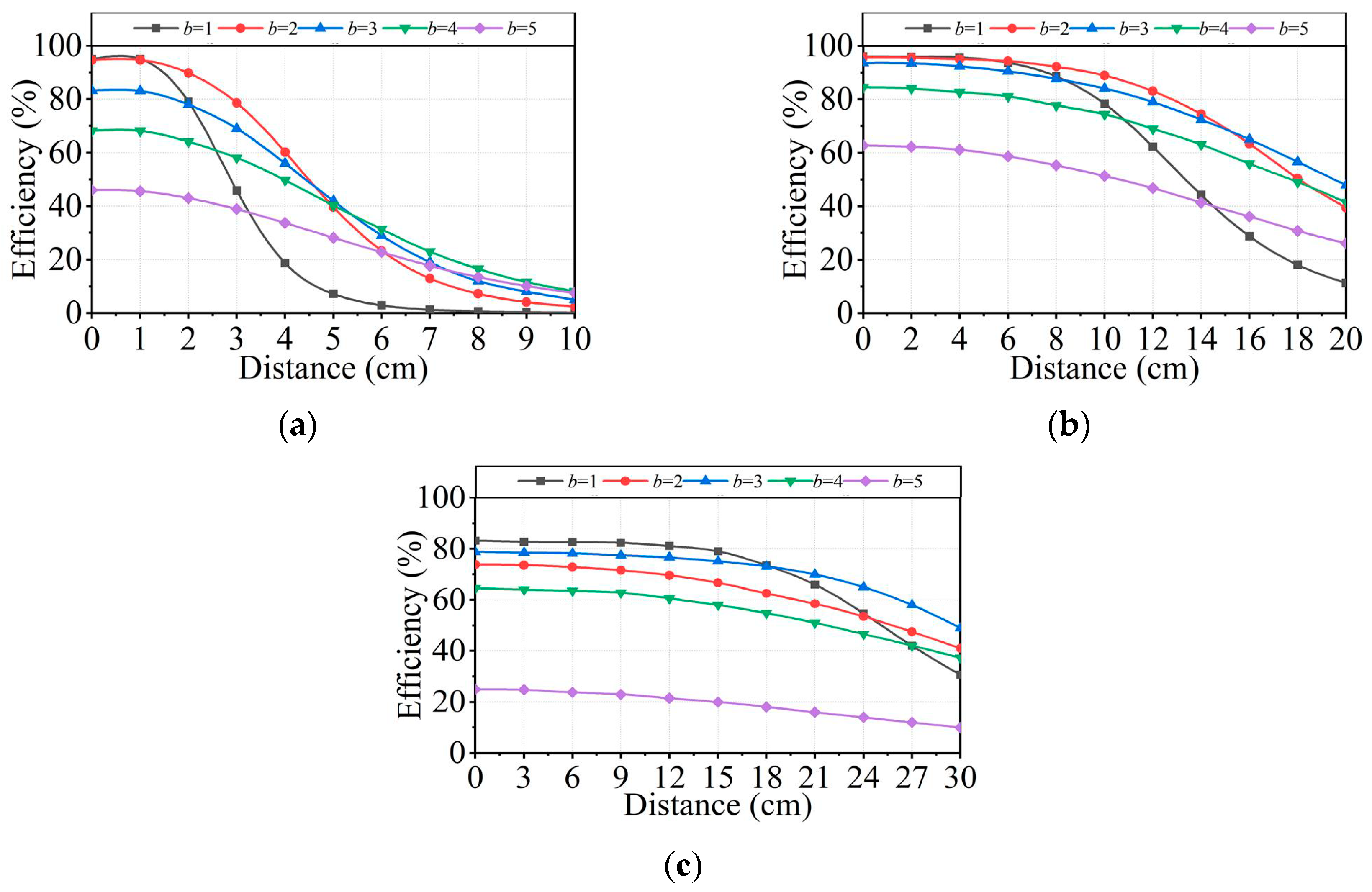
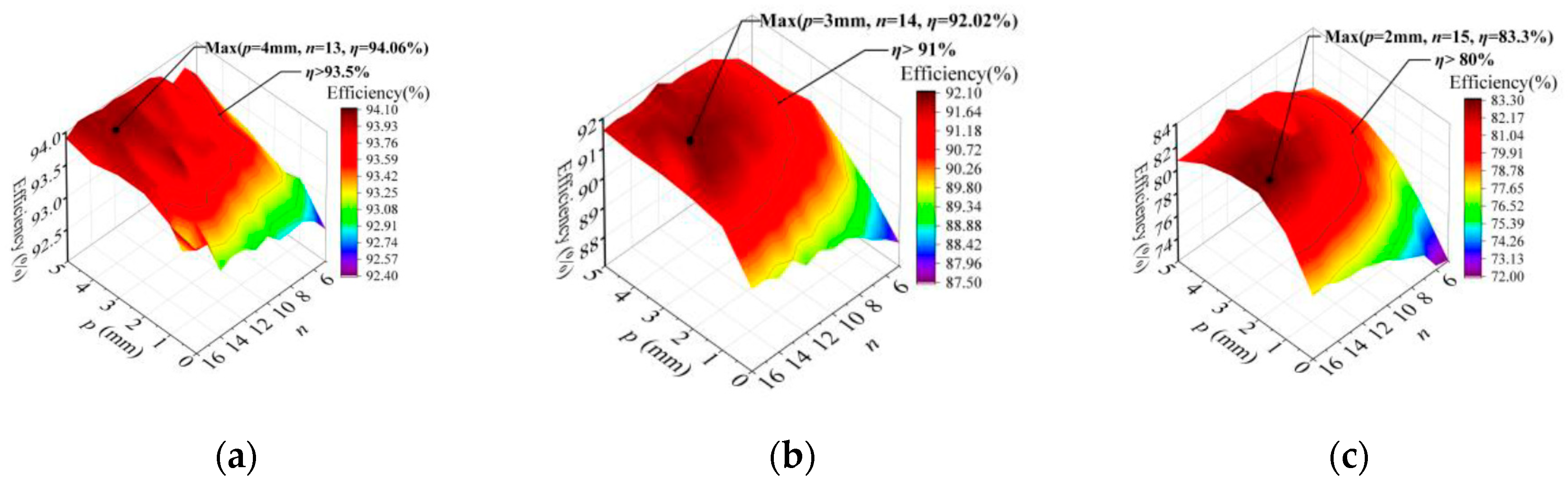
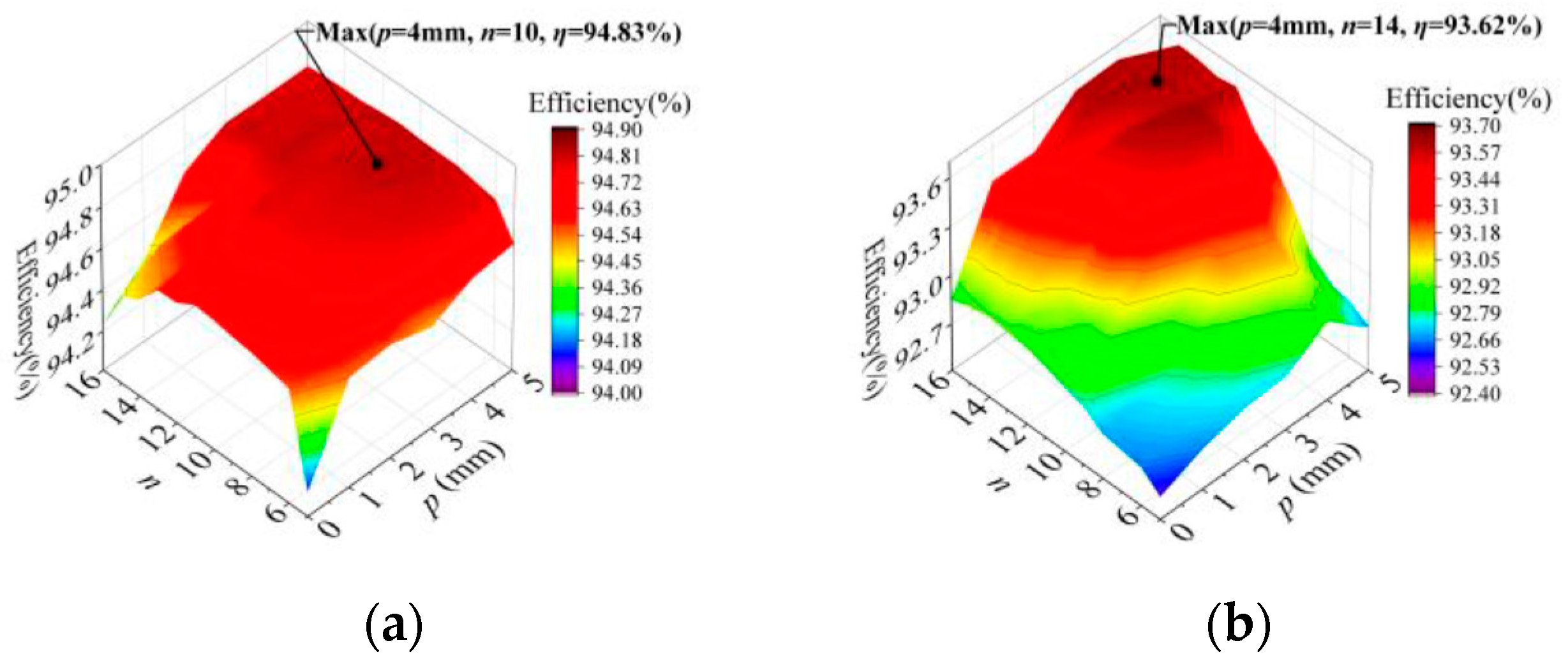
3.2. Design and Optimization of Coil Turns and Pitches
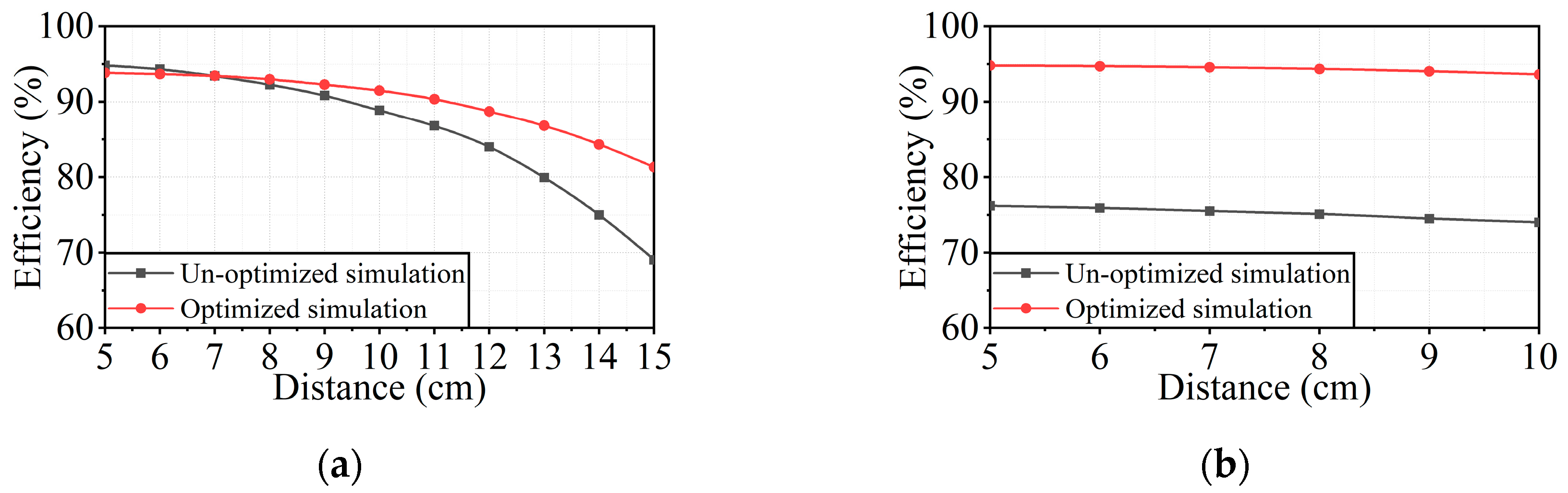
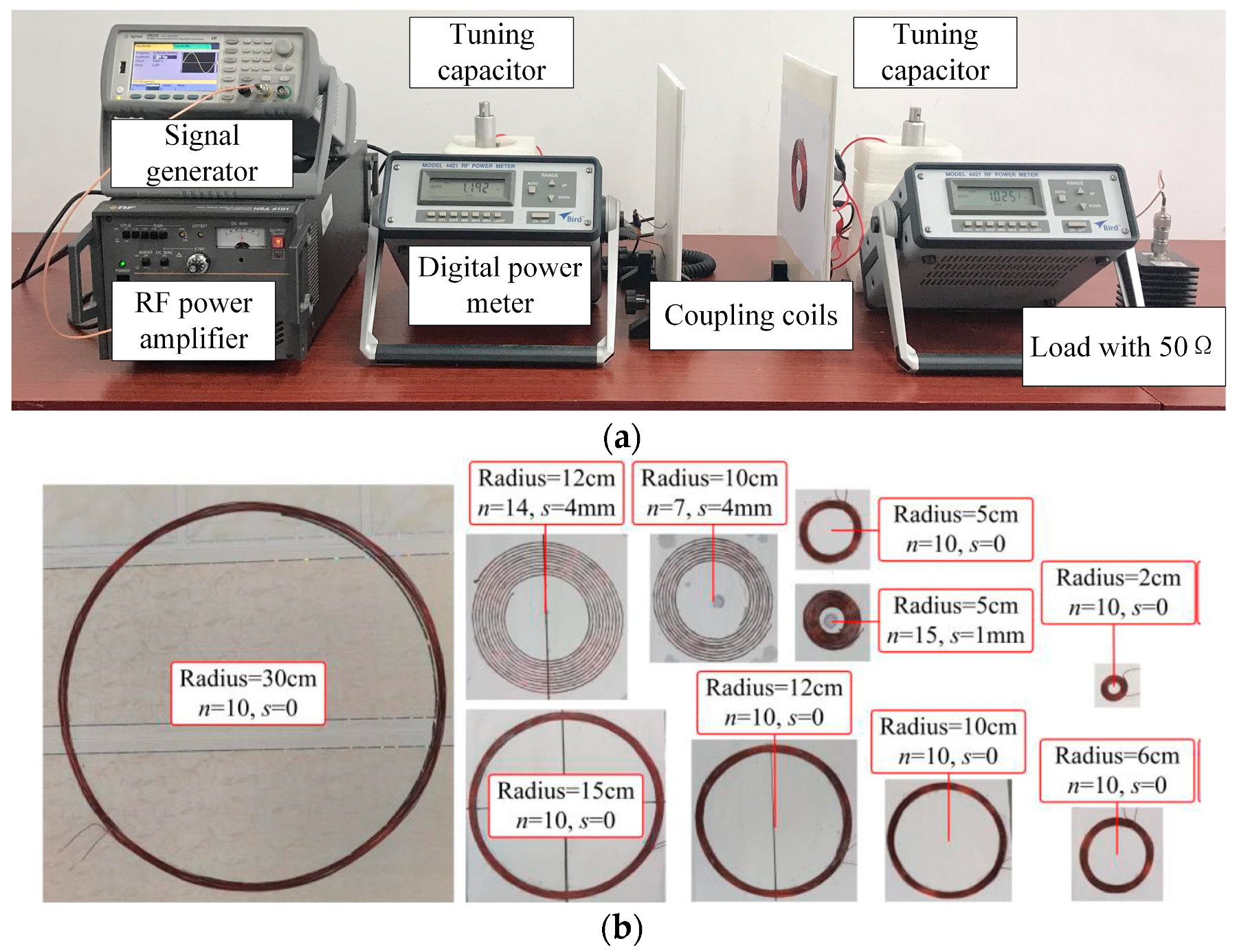
4. Experimental Results
5. Conclusions
- The power can be wirelessly transferred to the UAV battery from the ground power supply, as well as to the sensor battery from the UAV battery.
- A smaller Rx coil and a larger Tx coil should be used, but the radius ratio of Tx to Rx coils should not be more than 3.
- The optimal parameters were determined for the sensor coil (radius = 5 cm, n = 15, p = 1 mm), the UAV coil (radius = 10 cm, n = 7, p = 4 mm), and the ground transmitting coil (radius = 12 cm, n = 14, p = 4 mm).
- Through the optimization of coil parameters, the weight of the coil was reduced by 34.45% experimentally. At the same time, the PTE of the optimized UAV to sensor coils increased by 22% at a transmission distance of 15 cm, and that of the optimized ground transmitting side to UAV sensors increased by 25.1% at 10 cm.
Author Contributions
Funding
Conflicts of Interest
References
- García, L.; Parra, L.; Jimenez, J.M.; Lloret, J.; Lorenz, P. IoT-Based Smart Irrigation Systems: An Overview on the Recent Trends on Sensors and IoT Systems for Irrigation in Precision Agriculture. Sensors 2020, 20, 1042. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wenning, B.-L.; Pesch, D.; Timm-Giel, A.; Görg, C. Environmental monitoring aware routing: Making environmental sensor networks more robust. Telecommun. Syst. 2009, 43, 3–11. [Google Scholar] [CrossRef]
- Ansari, A.A.; Gera, P.; Mishra, B.; Mishra, D. A secure authentication framework for WSN-based safety monitoring in coal mines. Sadhana 2020, 45, 1–16. [Google Scholar] [CrossRef]
- Sheeja, R.; Sutha, J. Soft fuzzy computing to medical image compression in wireless sensor network-based tele medicine system. Multimedia Tools Appl. 2019, 79, 10215–10232. [Google Scholar] [CrossRef]
- Tong, B.; Wang, G.; Zhang, W.; Wang, C. Node Reclamation and Replacement for Long-Lived Sensor Networks. IEEE Trans. Parallel Distrib. Syst. 2011, 22, 1550–1563. [Google Scholar] [CrossRef]
- Deng, F.; Yue, X.; Fan, X.; Guan, S.; Xu, Y.; Chen, J. Multisource Energy Harvesting System for a Wireless Sensor Network Node in the Field Environment. IEEE Internet Things J. 2018, 6, 918–927. [Google Scholar] [CrossRef]
- Sharma, H.; Haque, A.; Jaffery, Z.A. Maximization of wireless sensor network lifetime using solar energy harvesting for smart agriculture monitoring. Ad Hoc Netw. 2019, 94. [Google Scholar] [CrossRef]
- Qian, J.; Jing, X. Wind-driven hybridized triboelectric-electromagnetic nanogenerator and solar cell as a sustainable power unit for self-powered natural disaster monitoring sensor networks. Nano Energy 2018, 52, 78–87. [Google Scholar] [CrossRef]
- Chamanian, S.; Baghaee, S.; Ulusan, H.; Zorlu, O.; Uysal-Biyikoglu, E.; Kulah, H. Implementation of Energy-Neutral Operation on Vibration Energy Harvesting WSN. IEEE Sens. J. 2019, 19, 3092–3099. [Google Scholar] [CrossRef]
- Percy, S.; Knight, C.; Cooray, F.; Smart, K. Supplying the Power Requirements to a Sensor Network Using Radio Frequency Power Transfer. Sensors 2012, 12, 8571–8585. [Google Scholar] [CrossRef] [Green Version]
- Xie, L.; Shi, Y.; Hou, Y.T.; Lou, A. Wireless power transfer and applications to sensor networks. IEEE Wirel. Commun. 2013, 20, 140–145. [Google Scholar] [CrossRef]
- La Rosa, R.; Dehollain, C.; Livreri, P. Advanced Monitoring Systems Based on Battery-Less Asset Tracking Modules Energized through RF Wireless Power Transfer. Sensors 2020, 20, 3020. [Google Scholar] [CrossRef] [PubMed]
- Peng, Y.; Li, Z.; Zhang, W.; Qiao, D. Prolonging Sensor Network Lifetime Through Wireless Charging. In Proceedings of the 2010 31st IEEE Real-Time Systems Symposium, San Diego, CA, USA, 30 November–3 December 2010; pp. 129–139. [Google Scholar]
- Shi, Y.; Xie, L.; Hou, Y.T.; Sherali, H.D. On renewable sensor networks with wireless energy transfer. In Proceedings of the 2011 IEEE INFOCOM, Shanghai, China, 10–15 April 2011; pp. 1350–1358. [Google Scholar]
- Xie, L.; Shi, Y.; Hou, Y.T.; Lou, W.; Sherali, H.D.; Midkiff, S.F. On renewable sensor networks with wireless energy transfer: The multi-node case. In Proceedings of the 2012 9th Annual IEEE Communications Society Conference on Sensor, Mesh and Ad Hoc Communications and Networks (SECON), Seoul, Korea, 18–21 June 2012. [Google Scholar]
- Xie, L.; Shi, Y.; Hou, Y.T.; Sherali, H.D. Making Sensor Networks Immortal: An Energy-Renewal Approach With Wireless Power Transfer. IEEE/ACM Trans. Netw. 2012, 20, 1748–1761. [Google Scholar] [CrossRef]
- Suman, S.; Kumar, S.; De, S. UAV-Assisted RF Energy Transfer. In Proceedings of the 2018 IEEE International Conference on Communications (ICC), Kansas City, MO, USA, 20–24 May 2018; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA; pp. 1–6. [Google Scholar]
- Basha, E.; Eiskamp, M.; Johnson, J.; Detweiler, C. UAV Recharging Opportunities and Policies for Sensor Networks. Int. J. Distrib. Sens. Netw. 2015, 11, 8. [Google Scholar] [CrossRef]
- Shigeta, R.; Suzuki, K.; Okuya, F.; Kawahara, Y. Trilateration-Inspired Sensor Node Position Estimation for UAV-Assisted Microwave Wireless Power Transfer. SICE J. Control. Meas. Syst. Integr. 2017, 10, 350–359. [Google Scholar] [CrossRef]
- D’Andrea, J.A.; Chou, C.-K.; Johnston, S.A.; Adair, E.R. Microwave effects on the nervous system. Bioelectromagn. 2003, 24, S107–S147. [Google Scholar] [CrossRef] [PubMed]
- Johnson, J.; Basha, E.; Detweiler, C. Charge selection algorithms for maximizing sensor network life with UAV-based limited wireless recharging. In Proceedings of the 2013 IEEE Eighth International Conference on Intelligent Sensors, Melbourne, VIC, Australia, 2–5 April 2013; pp. 159–164. [Google Scholar]
- Griffin, B.; Detweiler, C. Resonant wireless power transfer to ground sensors from a UAV. In Proceedings of the IEEE International Conference on Robotics & Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 2660–2665. [Google Scholar]
- Jawad, A.M.; Nordin, R.; Gharghan, S.K.; Jawad, H.M.; Ismail, M. Opportunities and Challenges for Near-Field Wireless Power Transfer: A Review. Energies 2017, 10, 1022. [Google Scholar] [CrossRef]
- Bieler, T.; Perrottet, M.; Nguyen, V.; Perriard, Y. Contactless power and information transmission. IEEE Trans. Ind. Appl. 2002, 38, 1266–1272. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Coil Type | Radius (cm) | Pitch (mm) | Number of turns | Tuning Capacitor (pF) | |
|---|---|---|---|---|---|
| Unoptimized | Sensor | 5 | 0 | 10 | 38.5 |
| UAV | 10 | 0 | 10 | 9.35 | |
| Ground | 12 | 0 | 10 | 5.04 | |
| Optimized | Sensor | 5 | 1 | 15 | 30.84 |
| UAV | 10 | 4 | 7 | 33.4 | |
| Ground | 12 | 4 | 14 | 10.1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Ni, X.; Liu, J.; Wang, R.; Ma, J.; Zhai, Y.; Huang, Y. Design and Optimization of Coupling Coils for Bidirectional Wireless Charging System of Unmanned Aerial Vehicle. Electronics 2020, 9, 1964. https://doi.org/10.3390/electronics9111964
Li Y, Ni X, Liu J, Wang R, Ma J, Zhai Y, Huang Y. Design and Optimization of Coupling Coils for Bidirectional Wireless Charging System of Unmanned Aerial Vehicle. Electronics. 2020; 9(11):1964. https://doi.org/10.3390/electronics9111964
Chicago/Turabian StyleLi, Yang, Xin Ni, Jiaming Liu, Rui Wang, Jingnan Ma, Yujie Zhai, and Yuepeng Huang. 2020. "Design and Optimization of Coupling Coils for Bidirectional Wireless Charging System of Unmanned Aerial Vehicle" Electronics 9, no. 11: 1964. https://doi.org/10.3390/electronics9111964