A Novel Nature-Inspired Maximum Power Point Tracking (MPPT) Controller Based on SSA-GWO Algorithm for Partially Shaded Photovoltaic Systems


Abstract
:1. Introduction
2. Proposed MPPT Controller
2.1. Description of SSA
2.2. Modifying SSA with GWO Algorithm
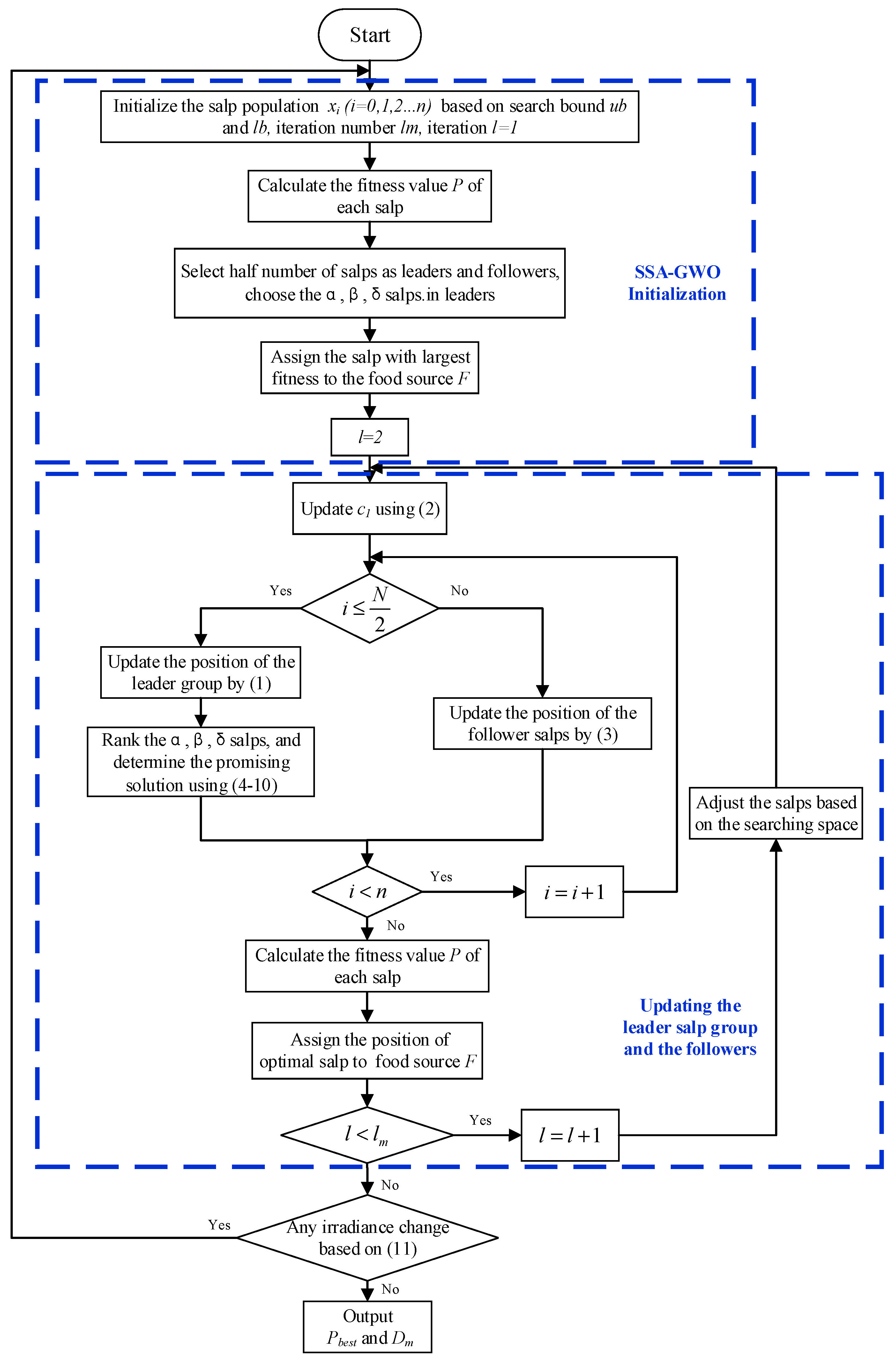
2.3. MPPT Controller Based on SSA-GWO Algorithm
- Step 1: Initialization. In a standard initialization, the salps are usually initialized randomly. For the proposed MPPT algorithm, the salps are initialized within the search space (0, 1), where the output voltage corresponding to the position of salps covers a wide range.
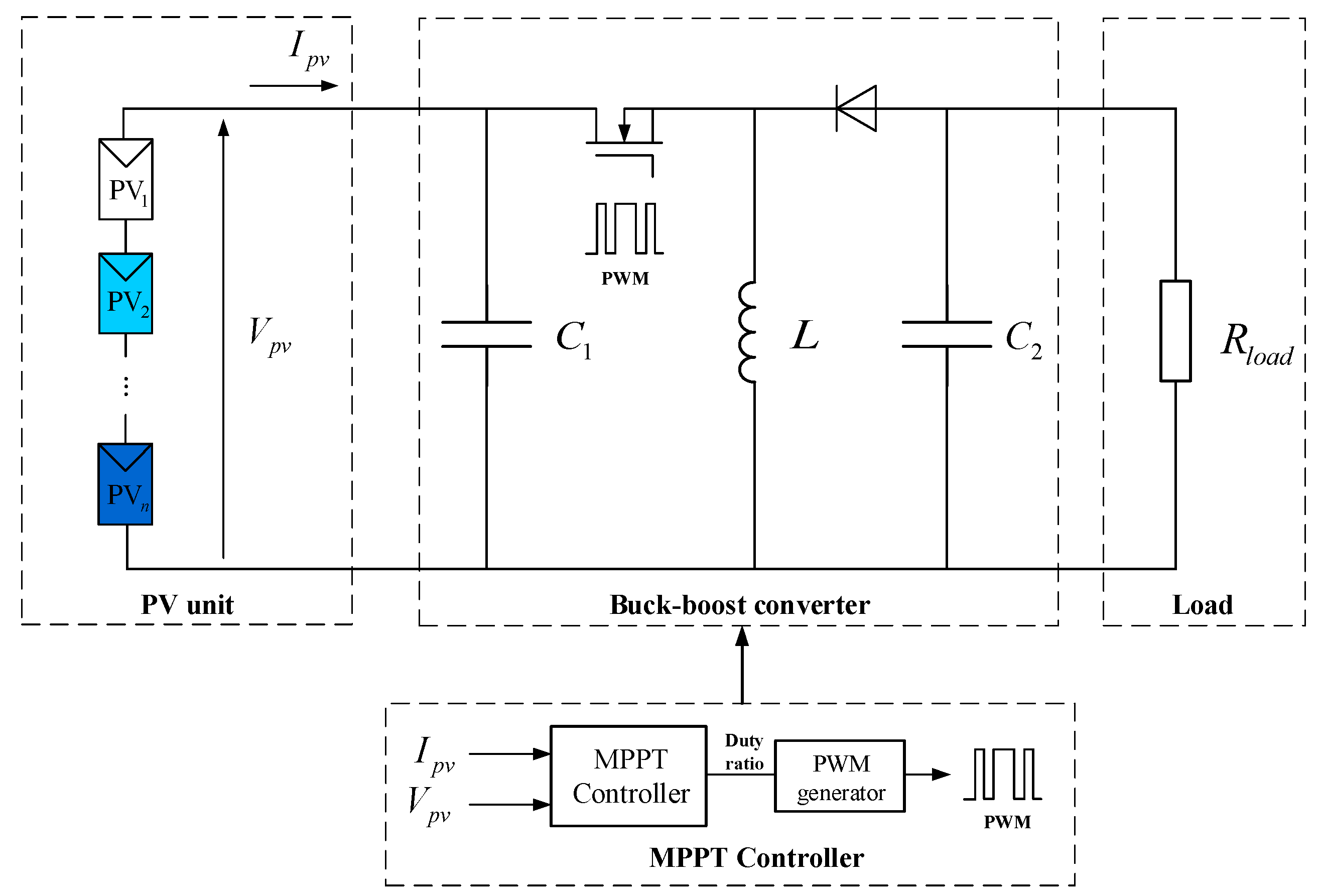
- Step 2: Fitness evaluation. The duty cycle, i.e., the position of salps, is connected to the Pulse Width Modulation (PWM). After a fixed period, the corresponding output power is obtained as the fitness of each salp.
- Step 3: Determining the leader group and obtain the food source. The fitness values are sorted in descending order and the first half salps with larger fitness are categorized into leader group while the rest are the followers. The best salp with the largest fitness will be selected as the food source F.
- Step 4: Updating the coefficient c1. The parameter is updated with Equation (2), which decides the exploration and exploitation.
- Step 5: Updating the leader salps and follower salps. Position of the leaders are updated by Equation (1) and the promising GMPP for the followers to pursue are updated by Equations (4) to (10). Meanwhile, the followers are updated by Equation (3). Besides this, the salps will be amended based on the upper and lower bound of the searching space. If the salps’ positions reach the bound, the position of the salp will be set to the corresponding bound.
- Step 6: Calculation of fitness and obtaining the food source. Input the duty ratio of each salp to the power converter and save the corresponding fitness value. The fittest salp will be selected as the food source.
- Step 7: Iteration check. The convergence criterion is checked. If the preset iteration is reached, the calculation will be terminated. Otherwise, steps 2 to 5 will be conducted iteratively until the termination criterion is met.
- Step 8: Reinitialization. In a PV system, the optimum output power is dependent on weather conditions. Therefore, a restart scheme is employed to enable the proposed SSA-GWO MPPT controller to respond rapidly to the irradiance change. The proposed SSA-GWO algorithm will restart when the following equation is satisfiedwhere Preal is the measured actual power of PV arrays, Pm is the current global MPP of the array. When partial shading conditions occur, Preal will be much lower than Pm and ΔP is set to 0.05 to obtain satisfactory performance.
3. Numerical Simulation Analysis and Discussion
4. Simulation of PV System under Static and Dynamic PSCs
4.1. Complex Static Partial Shading Condition
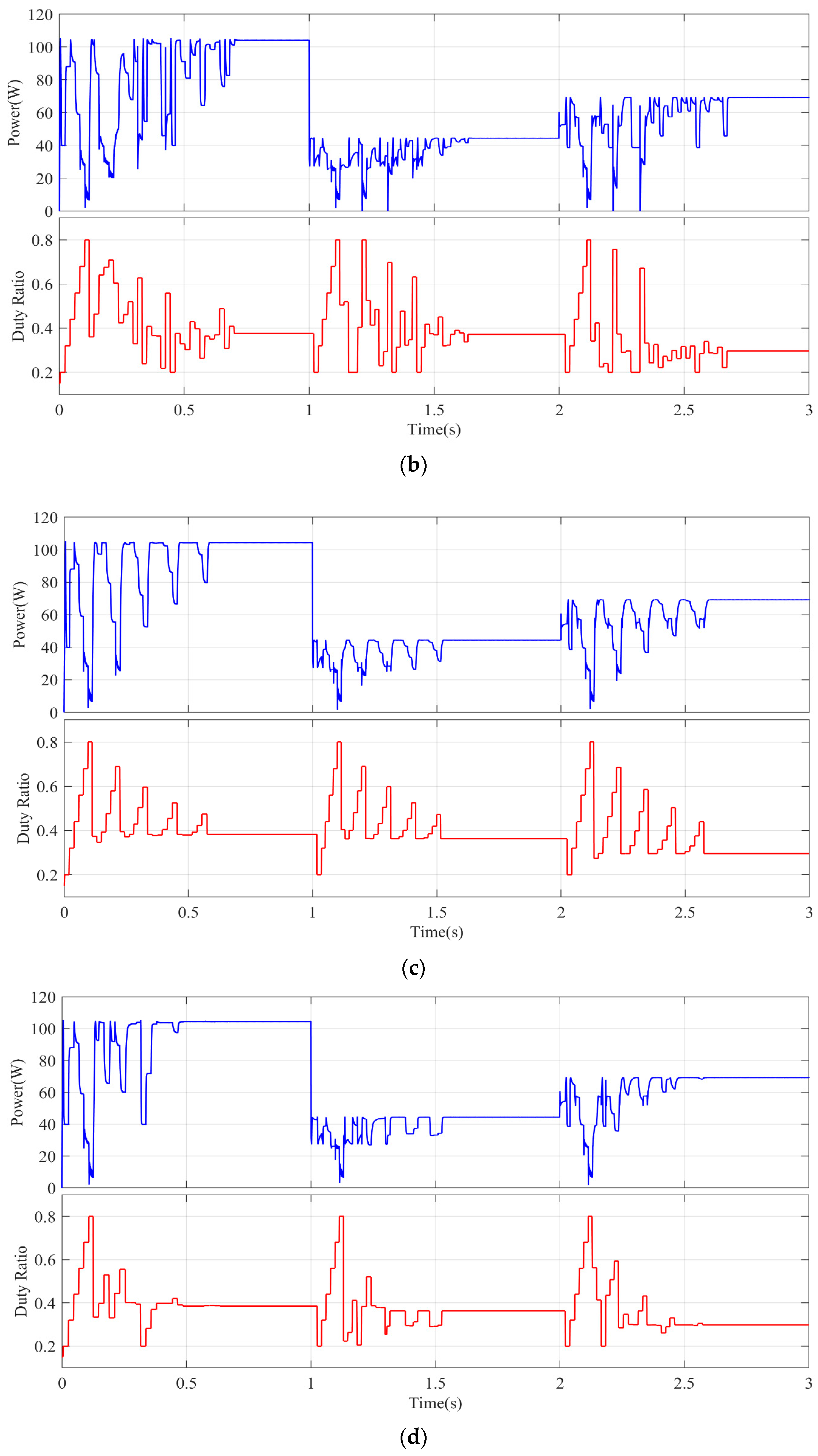
4.2. Dynamic Performance Under Sudden Irradiance Change
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Subudhi, B.; Pradhan, R. A comparative study on maximum power point tracking techniques for photovoltaic power systems. IEEE Trans. Sustain. Energy 2013, 4, 89–98. [Google Scholar] [CrossRef]
- Femia, N.; Petrone, G.; Spagnuolo, G.; Vitelli, M. Optimization of perturb and observe maximum power point tracking method. IEEE Trans. Power Electron. 2005, 20, 963–973. [Google Scholar] [CrossRef]
- Tey, K.S.; Mekhilef, S. Modified incremental conductance algorithm for photovoltaic system under partial shading conditions and load variation. IEEE Trans. Ind. Electron. 2014, 61, 5384–5392. [Google Scholar]
- Amir, A.; Amir, A.; Selvaraj, J.; Rahim, N.A.; Abusorrah, A.M. Conventional and modified MPPT techniques with direct control and dual scaled adaptive step-size. Sol. Energy 2017, 157, 1017–1031. [Google Scholar] [CrossRef]
- Olalla, C.; Clement, D.; Rodriguez, M.; Maksimovic, D. Architectures and control of submodule integrated DC–DC converters for photovoltaic applications. IEEE Trans. Power Electron. 2013, 28, 2980–2997. [Google Scholar] [CrossRef]
- Necaibia, S.; Kelaiaia, M.S.; Labar, H.; Necaibia, A.; Castronuovo, E.D. Enhanced auto-scaling incremental conductance MPPT method, implemented on low-cost microcontroller and SEPIC converter. Sol. Energy 2019, 180, 152–168. [Google Scholar] [CrossRef]
- Ghasemi, M.A.; Foroushani, H.M.; Parniani, M. Partial shading detection and smooth maximum power point tracking of PV arrays under PSC. IEEE Trans. Power Electron. 2016, 31, 6281–6292. [Google Scholar] [CrossRef]
- Hammami, M.; Ricco, M.; Ruderman, A.; Grandi, G. Three-Phase Three-Level Flying Capacitor PV Generation System with an Embedded Ripple Correlation Control MPPT Algorithm. Electronics 2019, 8, 118. [Google Scholar] [CrossRef]
- Afzal Awan, M.; Mahmood, T. A Novel Ten Check Maximum Power Point Tracking Algorithm for a Standalone Solar Photovoltaic System. Electronics 2018, 7, 327. [Google Scholar] [CrossRef]
- Baimel, D.; Tapuchi, S.; Levron, Y.; Belikov, J. Improved Fractional Open Circuit Voltage MPPT Methods for PV Systems. Electronics 2019, 8, 321. [Google Scholar] [CrossRef]
- Yilmaz, U.; Kircay, A.; Borekci, S. PV system fuzzy logic MPPT method and PI control as a charge controller. Renew. Sustain. Energy Rev. 2018, 81, 994–1001. [Google Scholar] [CrossRef]
- Li, X.; Wen, H.; Hu, Y.; Jiang, L. A novel beta parameter based fuzzy-logic controller for photovoltaic MPPT application. Renew. Energy 2019, 130, 416–427. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, Y.; Fang, G.; Zhang, B.; Wen, H.; Tang, H.; Fu, L.; Chen, X. An Advanced Maximum Power Point Tracking Method for Photovoltaic Systems by Using Variable Universe Fuzzy Logic Control Considering Temperature Variability. Electronics 2018, 7, 355. [Google Scholar] [CrossRef]
- Rizzo, S.A.; Scelba, G. ANN based MPPT method for rapidly variable shading conditions. Appl. Energy 2015, 145, 124–132. [Google Scholar] [CrossRef]
- Chine, W.; Mellit, A.; Lughi, V.; Malek, A.; Sulligoi, G.; Pavan, A.M. A novel fault diagnosis technique for photovoltaic systems based on artificial neural networks. Renew. Energy 2016, 90, 501–512. [Google Scholar] [CrossRef]
- Robles Algarín, C.; Sevilla Hernández, D.; Restrepo Leal, D. A low-cost maximum power point tracking system based on neural network inverse model controller. Electronics 2018, 7, 4. [Google Scholar] [CrossRef]
- Jiang, L.L.; Srivatsan, R.; Maskell, D.L. Computational intelligence techniques for maximum power point tracking in PV systems: A review. Renew. Sustain. Energy Rev. 2018, 85, 14–45. [Google Scholar] [CrossRef]
- Liu, Y.-H.; Huang, S.-C.; Huang, J.-W.; Liang, W.-C. A particle swarm optimization-based maximum power point tracking algorithm for PV systems operating under partially shaded conditions. IEEE Tran. Energy Convers. 2012, 27, 1027–1035. [Google Scholar] [CrossRef]
- Mao, M.; Duan, Q.; Yang, Z.; Duan, P. Modeling and global MPPT for PV system under partial shading conditions using modified artificial fish swarm algorithm. In Proceedings of the 2016 IEEE International Symposium on Systems Engineering (ISSE), Edinburgh, UK, 3–5 October 2016; pp. 1–7. [Google Scholar]
- Soufyane Benyoucef, A.; Chouder, A.; Kara, K.; Silvestre, S. Artificial bee colony based algorithm for maximum power point tracking (MPPT) for PV systems operating under partial shaded conditions. Appl. Soft Comput. 2015, 32, 38–48. [Google Scholar] [CrossRef] [Green Version]
- Mao, M.; Zhang, L.; Duan, P.; Duan, Q.; Yang, M. Grid-connected modular PV-Converter system with shuffled frog leaping algorithm based DMPPT controller. Energy 2018, 143, 181–190. [Google Scholar] [CrossRef] [Green Version]
- Mohanty, S.; Subudhi, B.; Ray, P.K. A new MPPT design using grey wolf optimization technique for photovoltaic system under partial shading conditions. IEEE Trans. Sustain. Energy 2016, 7, 181–188. [Google Scholar] [CrossRef]
- Eltamaly, A.M.; Farh, H.M. Dynamic global maximum power point tracking of the PV systems under variant partial shading using hybrid GWO-FLC. Sol. Energy 2019, 177, 306–316. [Google Scholar] [CrossRef]
- Sundareswaran, K.; Peddapati, S.; Palani, S. MPPT of PV systems under partial shaded conditions through a colony of flashing fireflies. IEEE Trans. Energy Convers. 2014, 29, 463–472. [Google Scholar]
- Koad, R.B.; Zobaa, A.F.; El-Shahat, A. A novel MPPT algorithm based on particle swarm optimization for photovoltaic systems. IEEE Trans. Sustain. Energy 2017, 8, 468–476. [Google Scholar] [CrossRef]
- Li, H.; Yang, D.; Su, W.; Lü, J.; Yu, X. An overall distribution particle swarm optimization MPPT algorithm for photovoltaic system under partial shading. IEEE Trans. Ind. Electron. 2019, 66, 265–275. [Google Scholar] [CrossRef]
- Sundareswaran, K.; Palani, S. Application of a combined particle swarm optimization and perturb and observe method for MPPT in PV systems under partial shading conditions. Renew. Energy 2015, 75, 308–317. [Google Scholar] [CrossRef]
- Pilakkat, D.; Kanthalakshmi, S. An improved P&O algorithm integrated with artificial bee colony for photovoltaic systems under partial shading conditions. Sol. Energy 2019, 178, 37–47. [Google Scholar]
- Mirjalili, S.; Gandomi, A.H.; Mirjalili, S.Z.; Saremi, S.; Faris, H.; Mirjalili, S.M. Salp Swarm Algorithm: A bio-inspired optimizer for engineering design problems. Adv. Eng. Softw. 2017, 114, 163–191. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Tsai, H.L.; Tu, C.S.; Su, Y.J. Development of generalized photovoltaic model using MATLAB/Simulink. In Proceedings of the World Congress on Engineering and Computer Science, San Francisco, CA, USA, 22—24 October 2008; pp. 846–851. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Function | Dim | Search Range | Fmin | Type |
|---|---|---|---|---|
| 10 | [−100, 100] | 0 | Unimodal | |
| 10 | [−10, 10] | 0 | Unimodal | |
| 10 | [−100, 100] | 0 | Unimodal | |
| 10 | [−100, 100] | 0 | Unimodal | |
| 10 | [−30, 30] | 0 | Unimodal | |
| 10 | [−100, 100] | 0 | Unimodal | |
| 10 | [−1.28, 1.28] | 0 | Unimodal | |
| 10 | [−500, 500] | −418.9829 × 10 | Multimodal | |
| 10 | [−5.12, 5.12] | 0 | Multimodal | |
| 10 | [−32, 32] | 0 | Multimodal | |
| 10 | [−600, 600] | 0 | Multimodal | |
| 10 | [−50, 50] | 0 | Multimodal | |
| 10 | [−50, 50] | 0 | Multimodal |
| Algorithm | Parameter Settings |
|---|---|
| PSO | Inertia weight w = 0.9, C1 = C2 = 2 |
| SSA | C1: Self-adaption |
| SSA-GWO | a and C1: Self-adaption |
| Function | Index | PSO | SSA | SSA-GWO |
|---|---|---|---|---|
| f1 | Best | 1.4899 × 10−10 | 5.1222 × 10−10 | 7.2759 × 10−12 |
| Mean | 0.54751 | 8.2708 × 10−5 | 8.5053 × 10−11 | |
| STD | 2.6367 | 8.5841 × 10−4 | 3.7595 × 10−11 | |
| f2 | Best | 0.025965 | 0.0011806 | 1.101 × 10−6 |
| Mean | 1.8619 | 0.43577 | 2.4873 × 10−6 | |
| STD | 1.457 | 0.57199 | 6.1863 × 10−7 | |
| f3 | Best | 1.3329 × 10−7 | 0.050476 | 3.5286 × 10−10 |
| Mean | 10.3393 | 17.8683 | 2.1272 × 10−9 | |
| STD | 25.6427 | 23.4735 | 1.1302 × 10−9 | |
| f4 | Best | 0.38817 | 0.0075142 | 2.2977 × 10−6 |
| Mean | 5.2313 | 1.481 | 4.8977 × 10−6 | |
| STD | 3.1815 | 1.6162 | 1.2188 × 10−6 | |
| f5 | Best | 0.00081823 | 0.0035541 | 0.095366 |
| Mean | 164.4538 | 208.8242 | 128.3479 | |
| STD | 332.6081 | 444.9757 | 371.3509 | |
| f6 | Best | 0.0041224 | 0.00067943 | 0.00021082 |
| Mean | 0.53906 | 0.01156 | 0.0021277 | |
| STD | 0.29003 | 0.0096091 | 0.0014936 | |
| f8 | Best | −Inf | −3716.0755 | −3714.5585 |
| Mean | −Inf | −2763.9914 | −2874.5761 | |
| STD | NaN | 330.2627 | 318.3991 | |
| f9 | Best | 2.9851 | 2.9849 | 0.99496 |
| Mean | 19.8398 | 14.4535 | 11.0971 | |
| STD | 8.4259 | 7.1933 | 5.4115 | |
| f10 | Best | 0.12402 | 2.1373 × 10−5 | 1.7439 × 10−6 |
| Mean | 5.2821 | 2.3401 | 0.32278 | |
| STD | 2.0648 | 1.1404 | 0.70685 | |
| f11 | Best | 0.06798 | 0.039666 | 2.2012 × 10−10 |
| Mean | 0.87126 | 0.32775 | 0.10671 | |
| STD | 0.59614 | 0.20514 | 0.082469 | |
| f12 | Best | 0.0003799 | 0.013168 | 2.8442 × 10−12 |
| Mean | 4.2438 | 2.7214 | 0.037527 | |
| STD | 4.3704 | 2.2349 | 0.16814 | |
| f13 | Best | 0.0010674 | 2.364 × 10−5 | 1.235 × 10−11 |
| Mean | 4.1882 | 0.37209 | 0.0018249 | |
| STD | 5.8115 | 1.4615 | 0.0042647 |
| Parameter | Value |
|---|---|
| Maximum power (Pm) | 35 W |
| Open circuit voltage (Voc) | 21.6 V |
| Maximum power voltage (Vm) | 17.6 V |
| Short circuit current (Isc) | 1.98 A |
| Maximum power current (Im) | 2.25 A |
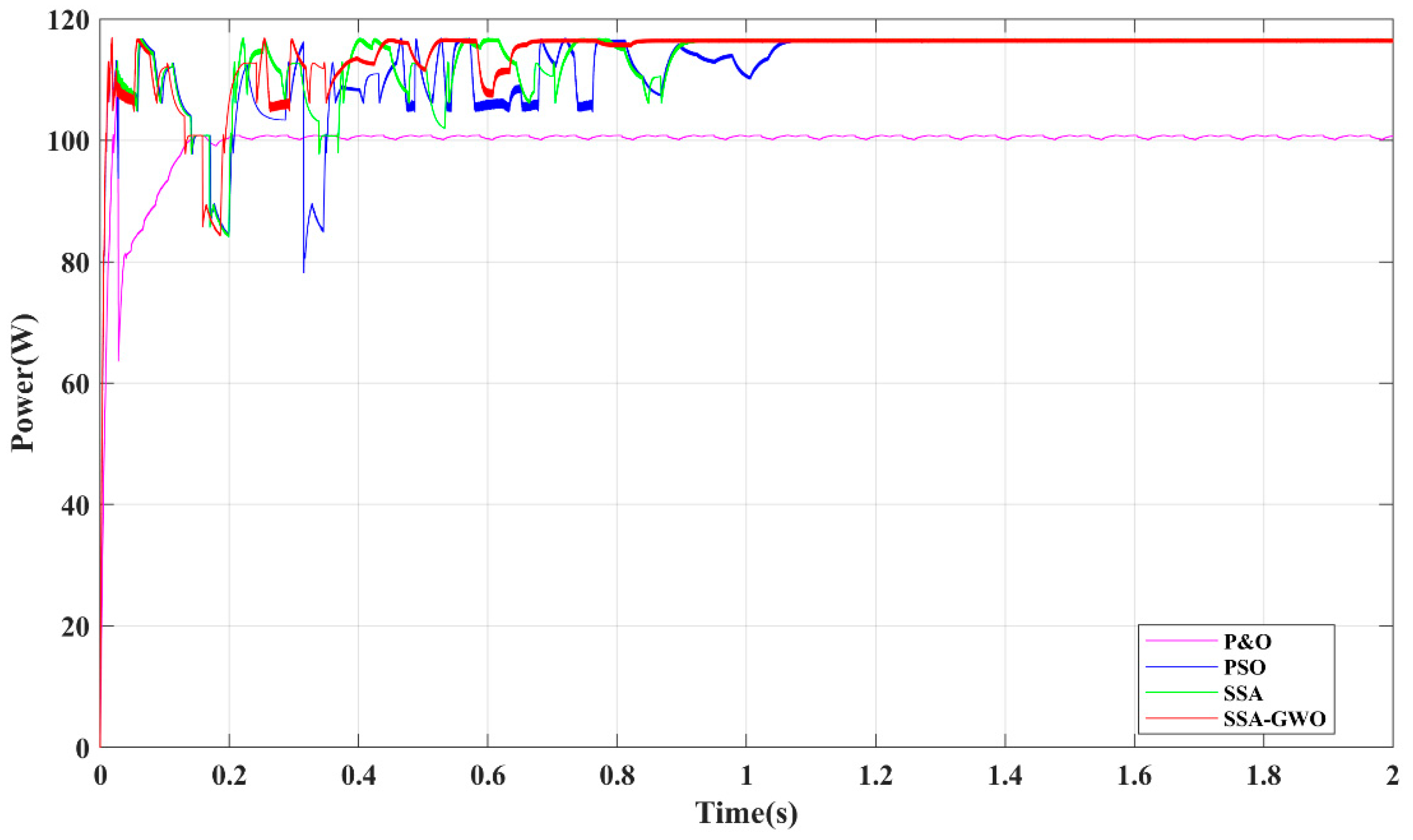
| Algorithms | Pmax (W) | MPPT Efficiency | Tracking Time (s) |
|---|---|---|---|
| P&O | 100.83 | 86.25% | 0.16 |
| PSO | 116.53 | 99.68% | 1.09 |
| SSA | 116.59 | 99.73% | 0.92 |
| SSA-GWO | 116.69 | 99.82% | 0.82 |
| Pattern | Irradiance of PV modules (W/m2) | ||
|---|---|---|---|
| G1 | G2 | G3 | |
| 1 | 1000 | 1000 | 1000 |
| 2 | 1000 | 600 | 300 |
| 3 | 1000 | 800 | 600 |
| Cases | Algorithms | Tracking Time (s) | Pmax (W) | MPPT Efficiency |
|---|---|---|---|---|
| Pattern 1 Preal = 105 W | P&O | 0.48 | 104.06 | 99.10% |
| PSO | 0.72 | 104.46 | 99.49% | |
| SSA | 0.58 | 104.60 | 99.62% | |
| SSA-GWO | 0.46 | 104.88 | 99.89% | |
| Pattern 2 Preal = 44.6 W | P&O | 0.16 | 34.64 | 77.69% |
| PSO | 0.64 | 44.47 | 99.71% | |
| SSA | 0.52 | 44.49 | 99.75% | |
| SSA-GWO | 0.53 | 44.55 | 99.89% | |
| Pattern 3 Preal = 69.4 W | P&O | 0.35 | 68.22 | 98.30% |
| PSO | 0.68 | 69.19 | 99.70% | |
| SSA | 0.66 | 69.23 | 99.76% | |
| SSA-GWO | 0.47 | 69.32 | 99.88% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wan, Y.; Mao, M.; Zhou, L.; Zhang, Q.; Xi, X.; Zheng, C. A Novel Nature-Inspired Maximum Power Point Tracking (MPPT) Controller Based on SSA-GWO Algorithm for Partially Shaded Photovoltaic Systems. Electronics 2019, 8, 680. https://doi.org/10.3390/electronics8060680
Wan Y, Mao M, Zhou L, Zhang Q, Xi X, Zheng C. A Novel Nature-Inspired Maximum Power Point Tracking (MPPT) Controller Based on SSA-GWO Algorithm for Partially Shaded Photovoltaic Systems. Electronics. 2019; 8(6):680. https://doi.org/10.3390/electronics8060680
Chicago/Turabian StyleWan, Yihao, Mingxuan Mao, Lin Zhou, Qianjin Zhang, Xinze Xi, and Chen Zheng. 2019. "A Novel Nature-Inspired Maximum Power Point Tracking (MPPT) Controller Based on SSA-GWO Algorithm for Partially Shaded Photovoltaic Systems" Electronics 8, no. 6: 680. https://doi.org/10.3390/electronics8060680