Impact of Polarization Distortions on Geometrical Structure Retrieval of Moving Man-Made Targets in ISAR Images


Abstract
:1. Introduction
2. Polarimetric System Model
2.1. Impact of the Channel Amplitude—Phase Imbalance
2.2. Impact of the Residual Phase Error
- The reciprocity of the measured PSM abides by reciprocity if the phase error is less than ;
- When the co-polarized elements are larger than the cross-polarized elements, the phase error will not violate the reciprocity of the PSM to be tested;
- When the co-polarized elements are smaller than the cross-polarized elements, if we assume that two co-polarized elements are equal and that , the phase error is constrained to be no greater than .
2.3. Impact of Different Distortions on Six Symmetric Scatterers
3. Impact on GSR
3.1. Impact of Different Distortions on Classified Scattering Centers of the UAV
- The decomposition is sensitive to different distortions, and this is consistent with the previous theoretical analysis;
- In general, the accuracy of the Cameron decomposition in the front view is better than that in the lateral view. This is because the interpretation of the UAV in the front view contains many dipoles. The dipoles are almost immune to various distortions;
- The blue solid line in Figure 10 indicates an accuracy of . Accordingly, we can observe that the crosstalk should be no greater than , the amplitude imbalance should be no bigger than , the phase imbalance should be no larger than , and the phase error should be no greater than in the front view, and these distortions should be no greater than , , , and in the lateral view, respectively;
- The requirements of the phase imbalance and the phase error are larger than those in the previous results, which are and , respectively. In the practical measurement, it is impossible to ensure that there is only one kind of error. Usually, multiple errors work together, leading to higher requirements placed on the phase imbalance and the phase error.
3.2. Impact of Various Distortions on the Estimation of the Significant Structure of the UAV
- The estimation accuracy decreases dramatically as the crosstalk increases beyond , the amplitude imbalance increases beyond , the phase imbalance increases to more than , or the phase error becomes larger than ;
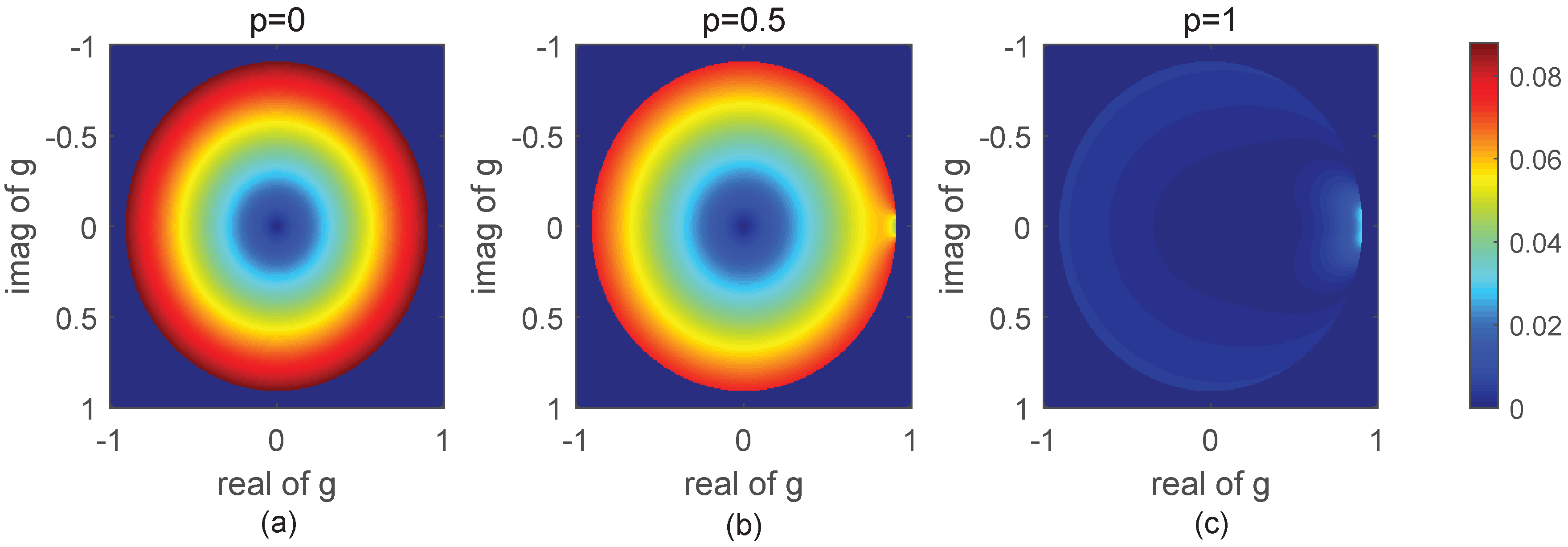
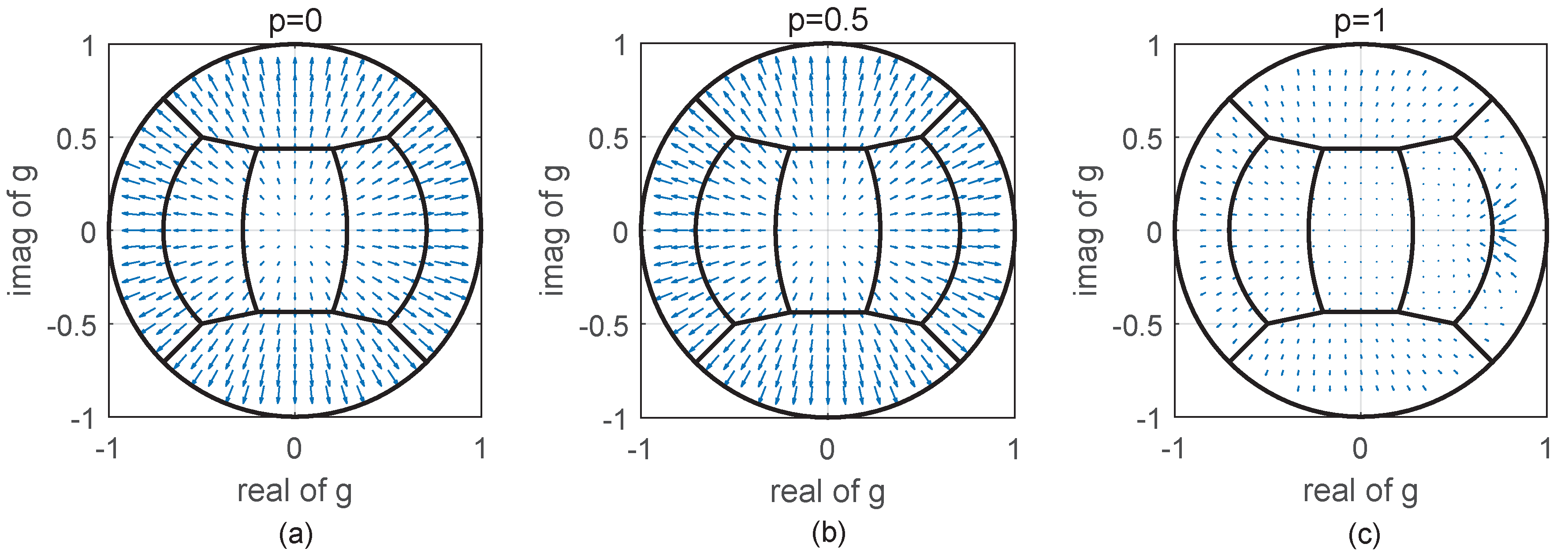
- The retrieved error of the three cylinders is different. In fact, whether it is a shrinking or divergent shift of g caused by the crosstalk and amplitude imbalance or the vortex torsion of g caused by the phase deviation, the scatterers in the neighborhood of different scattering regions on Cameron’s unit disk are the most susceptible to the errors. In other words, the retrieved accuracy will be different for those scatterers belonging to the same symmetric scatterers but with different distributions on Cameron’s unit disk.
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Cameron, W.L.; Leung, L.K. Feature motivated polarization scattering matrix decomposition. In Proceedings of the IEEE International Conference on Radar, Arlington, VA, USA, 7–10 May 1990; pp. 549–557. [Google Scholar]
- Cameron, W.L.; Youssef, N.N.; Leung, L.K. Simulated polarimetric signatures of primitive geometrical shapes. IEEE Trans. Geosci. Remote Sens. 1996, 34, 793–803. [Google Scholar]
- Wu, J.; Chen, Y.; Dai, D.; Chen, S.; Wang, X. Clustering-Based Geometrical Structure Retrieval of Man-Made Target in SAR Images. IEEE Geosci. Remote Sens. Lett. 2017, 14, 279–283. [Google Scholar]
- Duan, J.; Zhang, L.; Xing, M.; Wu, Y.; Wu, M. Polarimetric Target Decomposition Based on Attributed Scattering Center Model for Synthetic Aperture Radar Targets. IEEE Geosci. Remote Sens. Lett. 2014, 11, 2095–2099. [Google Scholar]
- Margarit, G.; Mallorqui, J.J.; Fabregas, X. Single-Pass Polarimetric SAR Interferometry for Vessel Classification. IEEE Trans. Geosci. Remote Sens. 2007, 45, 3494–3502. [Google Scholar] [Green Version]
- Saville, M.A.; Jackson, J.A.; Fuller, D.F. Rethinking vehicle classification with wide-angle polarimetric SAR. IEEE Aerosp. Electron. Syst. Mag. 2014, 29, 41–49. [Google Scholar]
- Wiesbeck, W.; Kahny, D. Single reference, three target calibration and error correction for monostatic, polarimetric free space measurements. Proc. IEEE 1991, 79, 1551–1558. [Google Scholar]
- Moisseev, D.N.; Unal, C.M.H.; Russchenberg, H.W.J.; Ligthart, L. Improved Polarimetric Calibration for Atmospheric Radars. J. Atmos. Ocean. Technol. 2002, 19. [Google Scholar] [CrossRef]
- Touzi, R.; Livingstone, C.E.; Lafontaine, J.R.C.; Lukowski, T.I. Consideration of antenna gain and phase patterns for calibration of polarimetric SAR data. IEEE Trans. Geosci. Remote Sens. 1993, 31, 1132–1145. [Google Scholar]
- Freeman, A.; Shen, Y.; Werner, C.L. Polarimetric SAR calibration experiment using active radar calibrators. IEEE Trans. Geosci. Remote Sens. 1990, 28, 224–240. [Google Scholar]
- Xiong, W. Polarimetric Calibration Using a Genetic Algorithm. IEEE Geosci. Remote Sens. Lett. 2007, 4, 421–425. [Google Scholar]
- Van Zyl, J.J. Calibration of Polarimetric Radar Images Using Only Image Parameters and Trihedral Corner Reflector Responses. IEEE Trans. Geosci. Remote Sens. 1990, 28, 337–348. [Google Scholar]
- Santalla, V.; Antar, Y.M.M.; Pino, A.G. Polarimetric radar covariance matrix algorithms and applications to meteorological radar data. IEEE Trans. Geosci. Remote Sens. 1999, 37, 1128–1137. [Google Scholar]
- Del Rio, V.S. Least Squares Estimation of Doppler and Polarimetric Parameters for Weather Targets. IEEE Trans. Geosci. Remote Sens. 2007, 45, 3760–3772. [Google Scholar]
- Wang, Y.; Ainsworth, T.L.; Lee, J. Assessment of System Polarization Quality for Polarimetric SAR Imagery and Target Decomposition. IEEE Trans. Geosci. Remote Sens. 2011, 49, 1755–1771. [Google Scholar]
- Guo, S.; Zhang, J.; Li, Y.; Hong, W. Effects of Polarization Distortion at Transmission and Faraday Rotation on Compact Polarimetric SAR System andH/ Decomposition. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1700–1704. [Google Scholar]
- Xu, F.; Wang, H.; Jin, Y.; Liu, X.; Wang, R.; Deng, Y. Impact of cross-polarization isolation on polarimetric target decomposition and target detection. Radio Sci. 2015, 50, 327–338. [Google Scholar] [Green Version]
- Aghababaee, H.; Sahebi, M.R. Incoherent Target Scattering Decomposition of Polarimetric SAR Data Based on Vector Model Roll-Invariant Parameters. IEEE Trans. Geosci. Remote Sens. 2016, 54, 4392–4401. [Google Scholar]
- Cloude, S.R.; Pottier, E. A Review of Target Decomposition Theorems in Radar Polarimetry. IEEE Trans. Geosci. Remote Sens. 1996, 34, 498–518. [Google Scholar]
- Cloude, S.R.; Pottier, E. An entropy based classification scheme for land application of polarimetric SAR. IEEE Trans. Geosci. Remote Sens. 1997, 35, 68–78. [Google Scholar]
- Zhang, J.; Hong, W. Equivalent system model for the calibration of polarimetric SAR under Faraday rotation conditions. Sci. China 2018, 61, 022301. [Google Scholar]
- Margarit, G.; Mallorquí, J.J.; Fortuny-Guasch, J.; López-Martínez, C. Exploitation of Ship Scattering in Polarimetric SAR for an Improved Classification Under High Clutter Conditions. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1224–1235. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Error | Impact (Arranged from Largest to Smallest) | |||||
|---|---|---|---|---|---|---|
| trihedral | dihedral | quarter wave | cylinder | narrow diplane | dipole | |
| narrow diplane | cylinder | dipole | trihedral, dihedral, and quarter wave are more stable | |||
| cylinder | trihedral | narrow diplane | dihedral | quarter wave | dipole | |
| cylinder | trihedral | narrow diplane | dihedral | quarter wave | dipole | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Q.; Pang, C.; Li, Y.; Wang, X. Impact of Polarization Distortions on Geometrical Structure Retrieval of Moving Man-Made Targets in ISAR Images. Electronics 2019, 8, 373. https://doi.org/10.3390/electronics8040373
Liu Q, Pang C, Li Y, Wang X. Impact of Polarization Distortions on Geometrical Structure Retrieval of Moving Man-Made Targets in ISAR Images. Electronics. 2019; 8(4):373. https://doi.org/10.3390/electronics8040373
Chicago/Turabian StyleLiu, Qiaoling, Chen Pang, Yongzhen Li, and Xuesong Wang. 2019. "Impact of Polarization Distortions on Geometrical Structure Retrieval of Moving Man-Made Targets in ISAR Images" Electronics 8, no. 4: 373. https://doi.org/10.3390/electronics8040373