Design, Simulation and Hardware Implementation of Shunt Hybrid Compensator Using Synchronous Rotating Reference Frame (SRRF)-Based Control Technique



Abstract
:1. Introduction
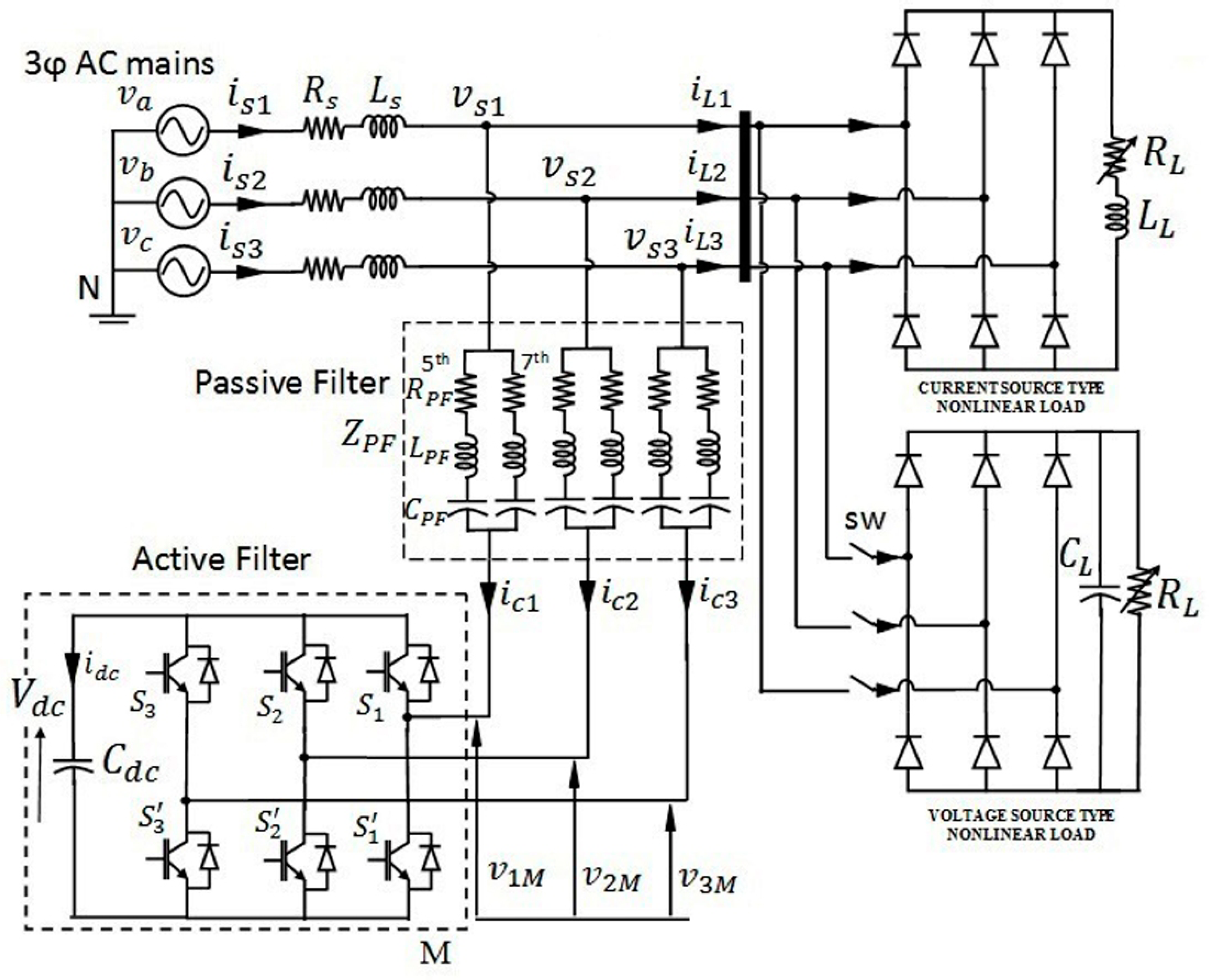
2. System Configuration of Hybrid Compensator
2.1. Modelling of Shunt Hybrid Power Compensator
2.2. Equations in dq Frame
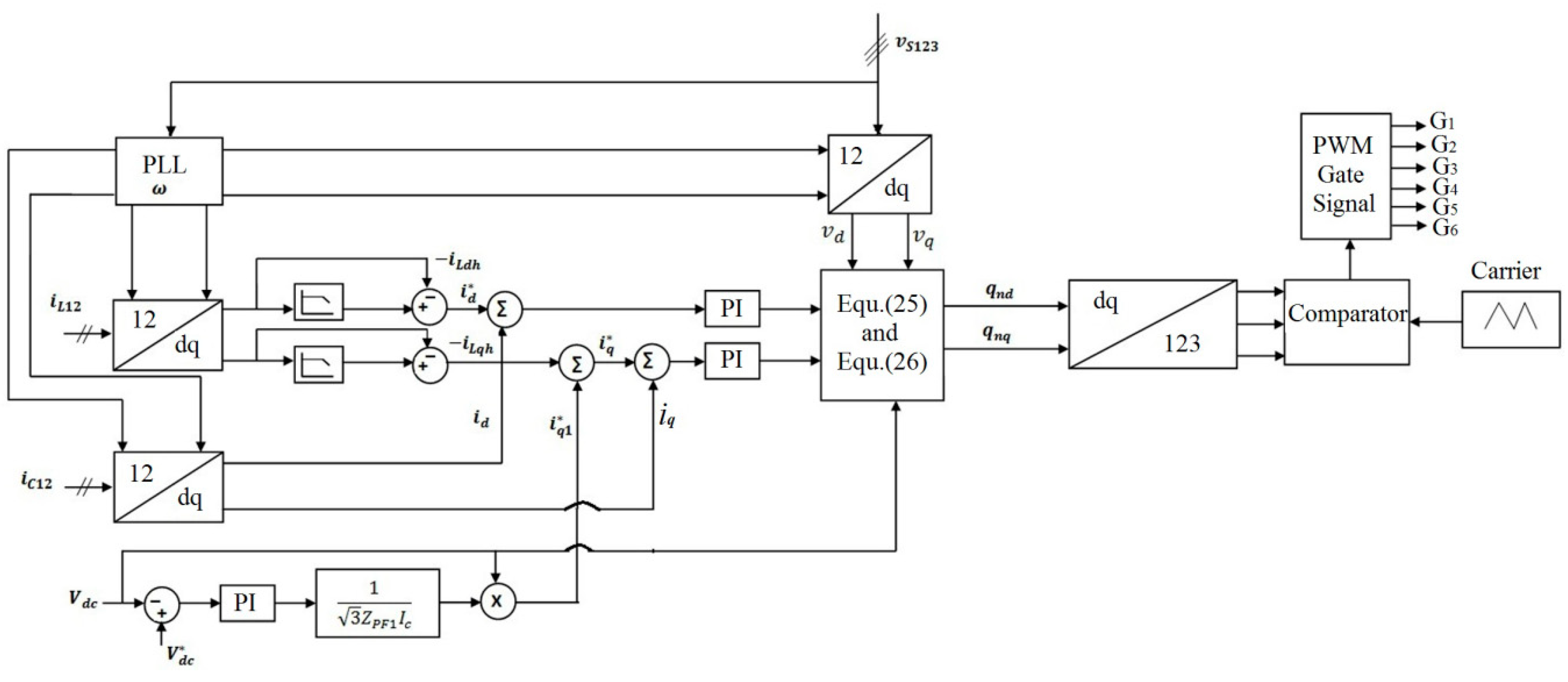
2.3. Control of Harmonic Currents
2.4. DC Link Voltage Control
2.5. Simulink Model of the Shunt Hybrid Power Compensator
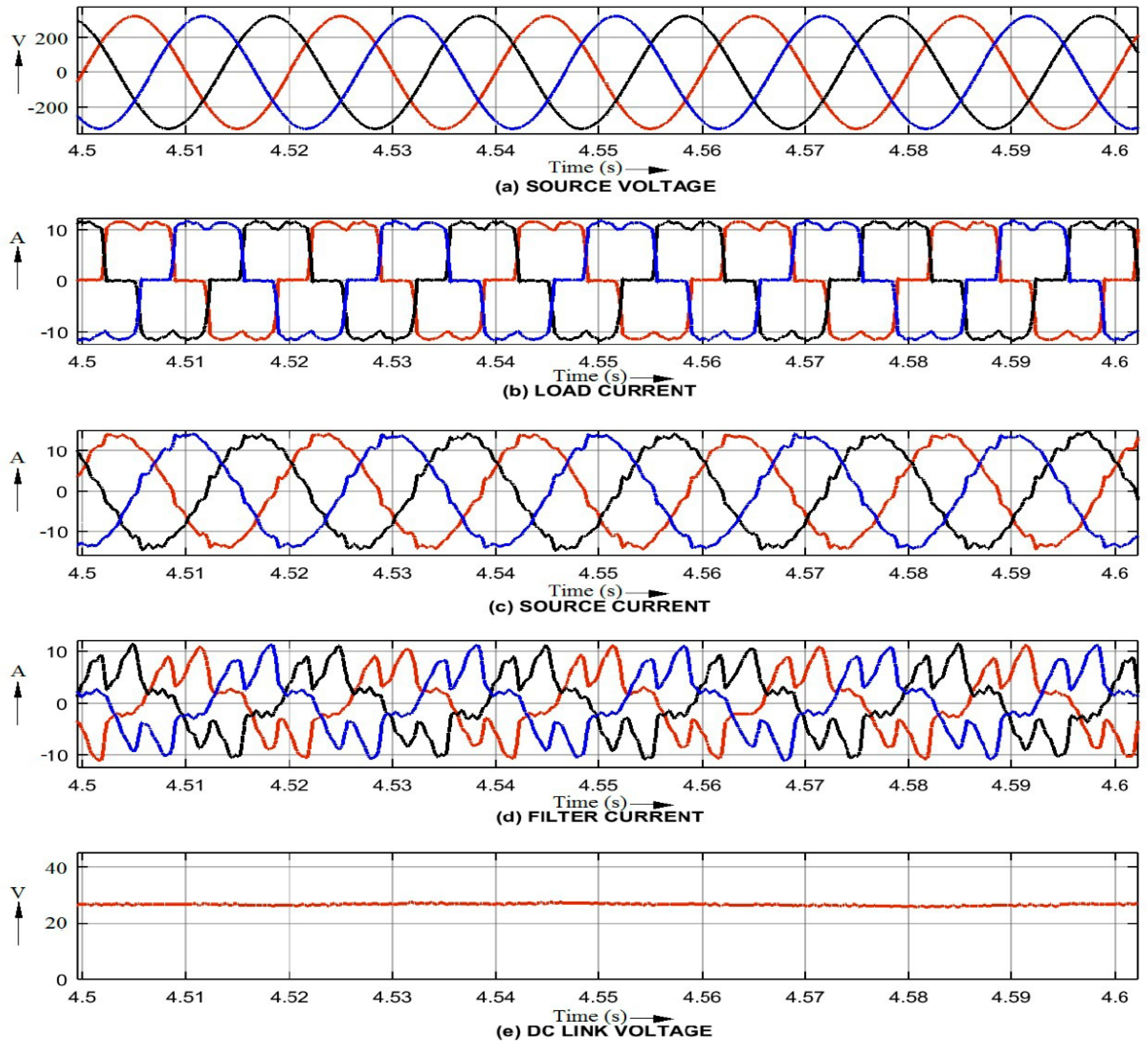
3. Simulation Results
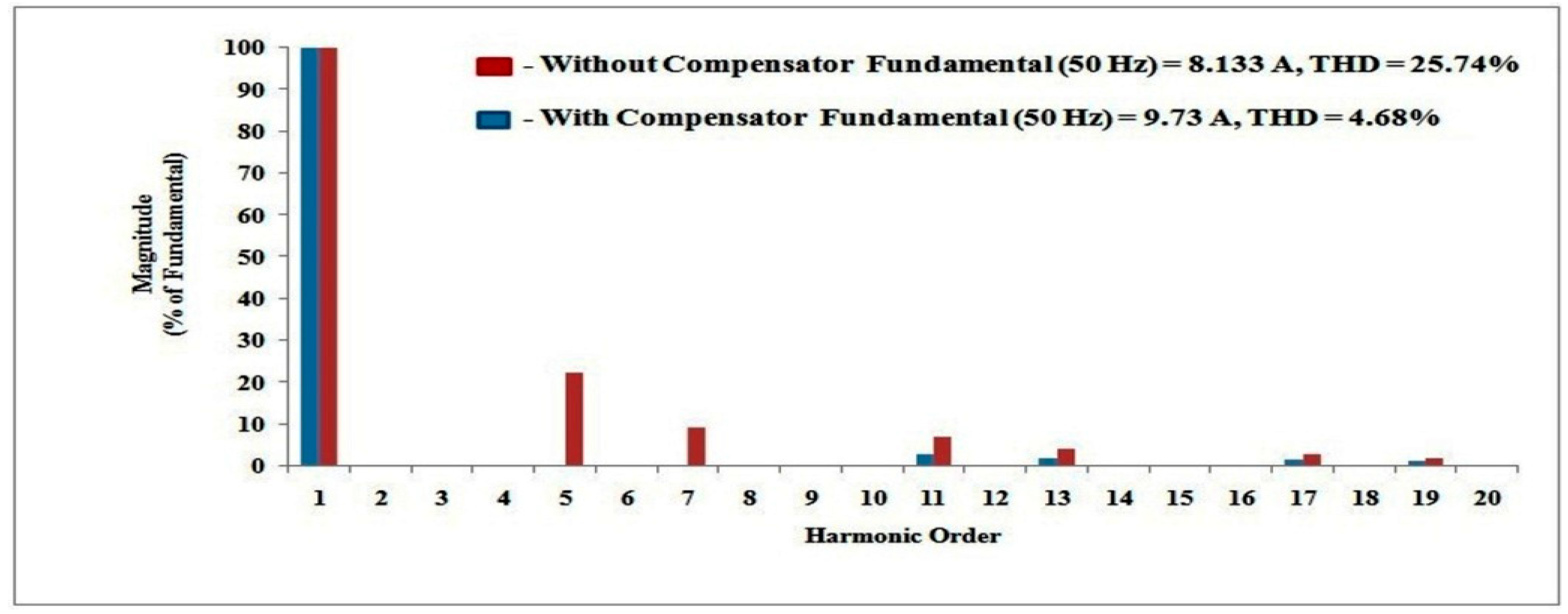
3.1. Performance of Shunt HPF to the Nonlinear Load of Current Source Type
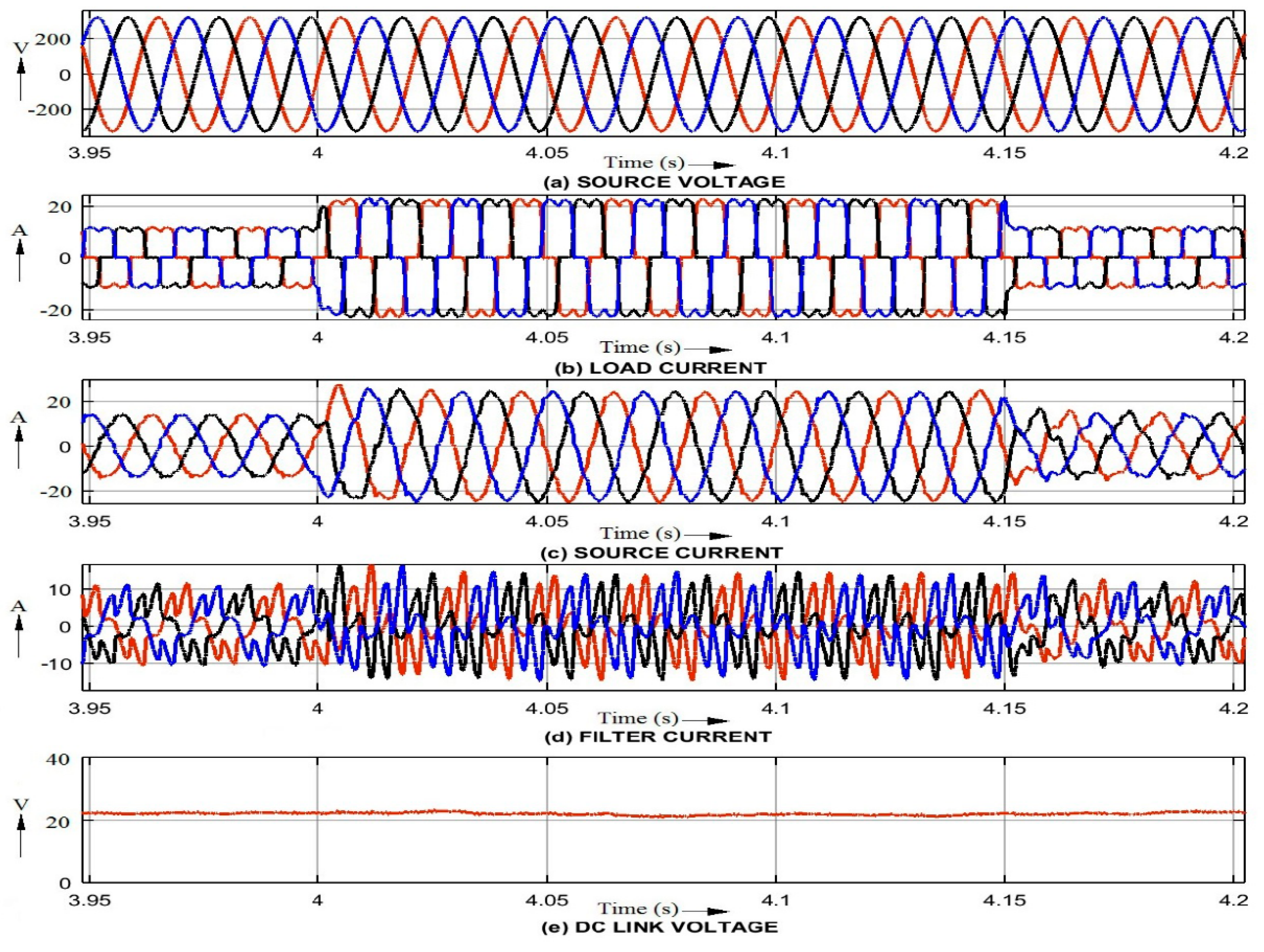
3.2. Varying Three-Phase Rectifier-Fed RL Load
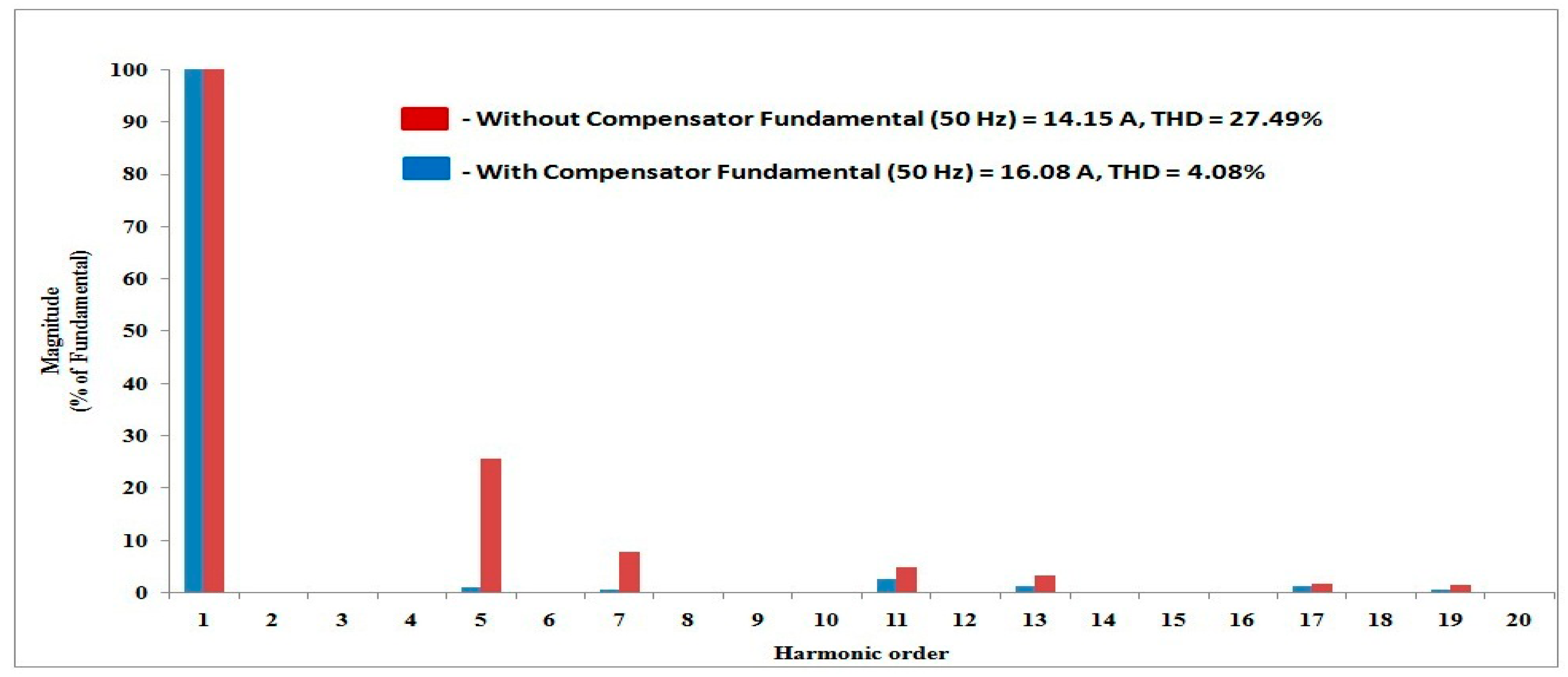
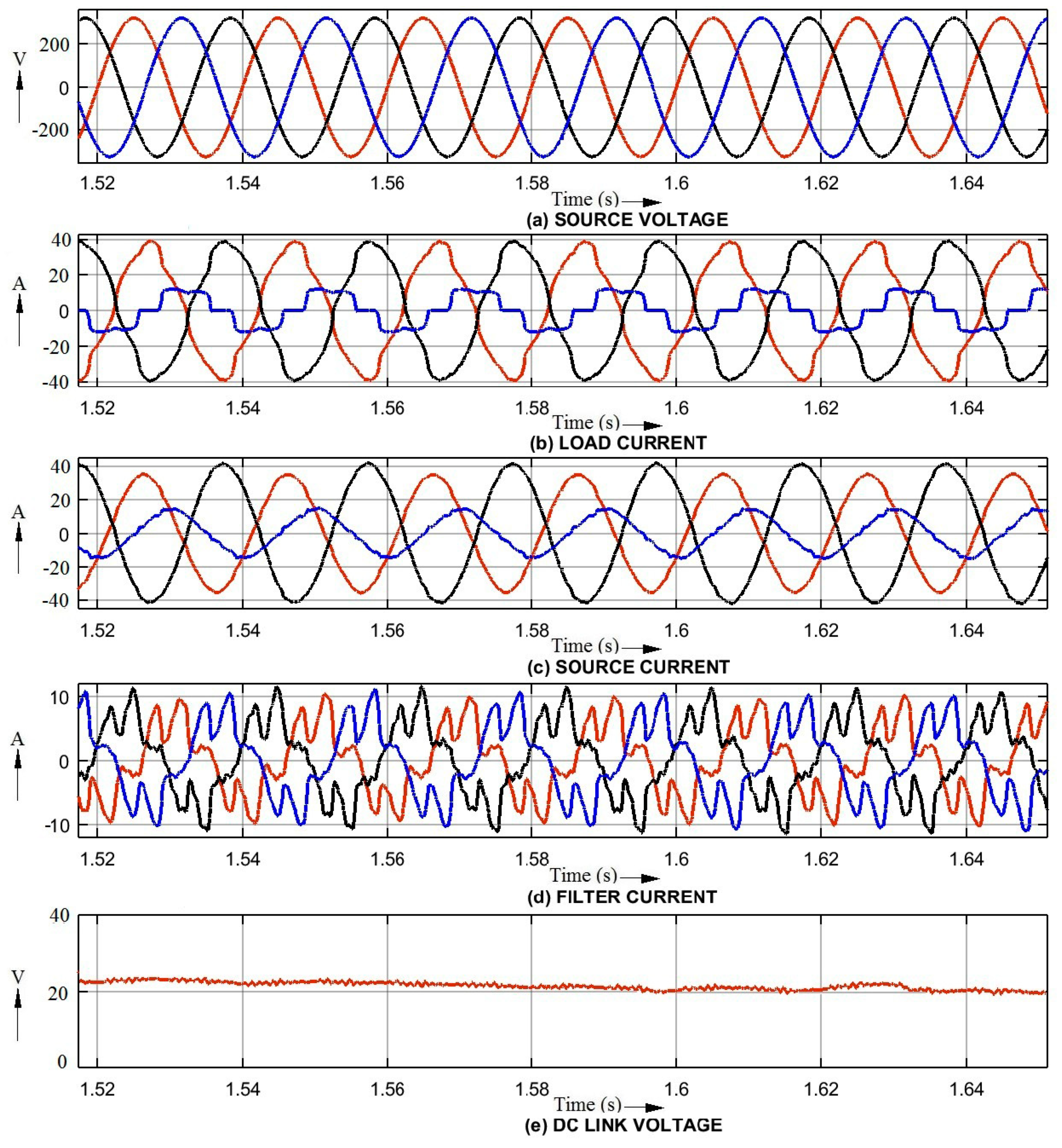
3.3. Three-Phase Rectifier-Fed RC Load
3.4. Varying Three-Phase Rectifier-Fed RC Load
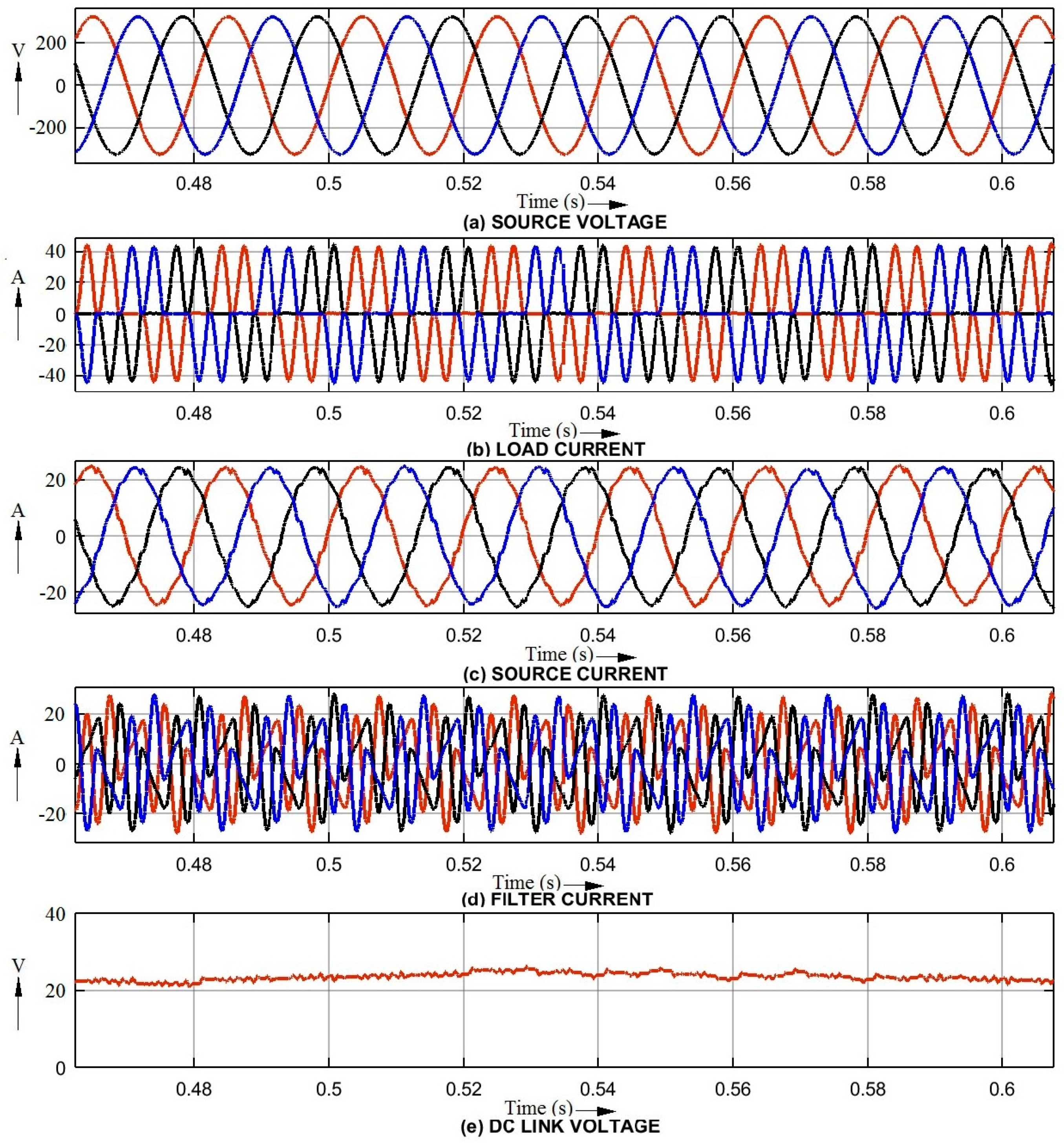
3.5. Unbalanced Loading Condition
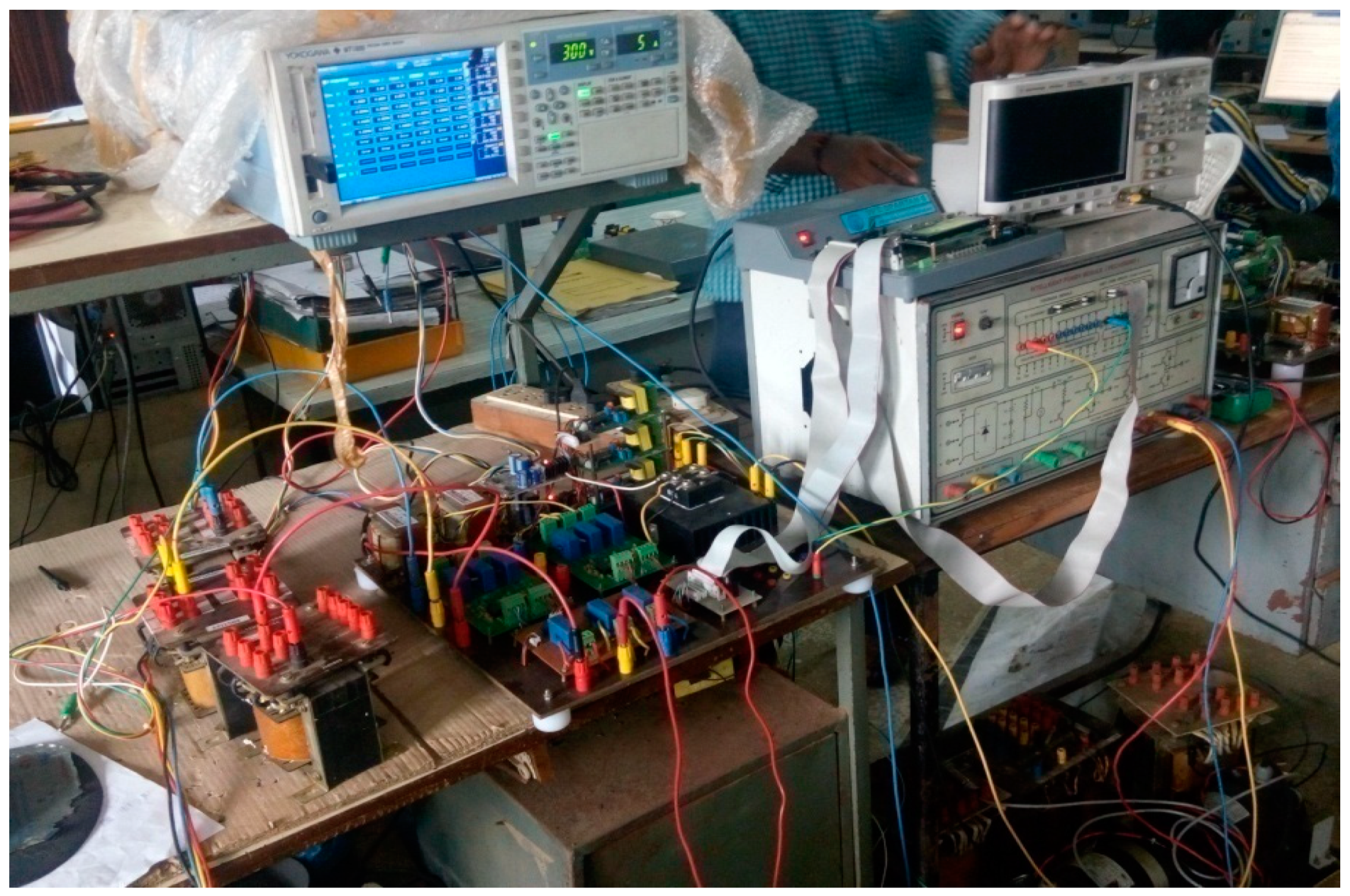
4. Hardware Fabrication
4.1. Hardware Resultsand Discussion
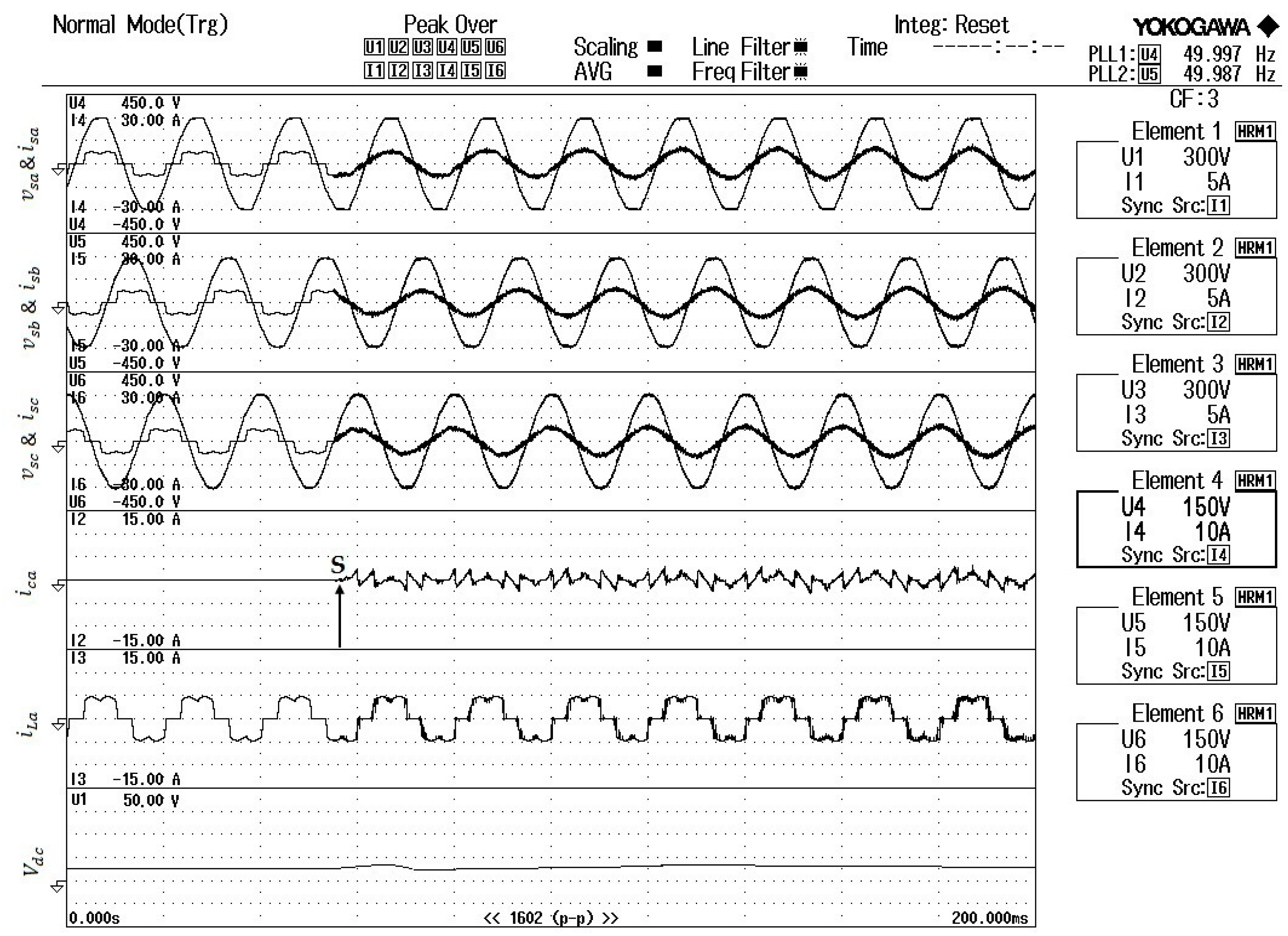
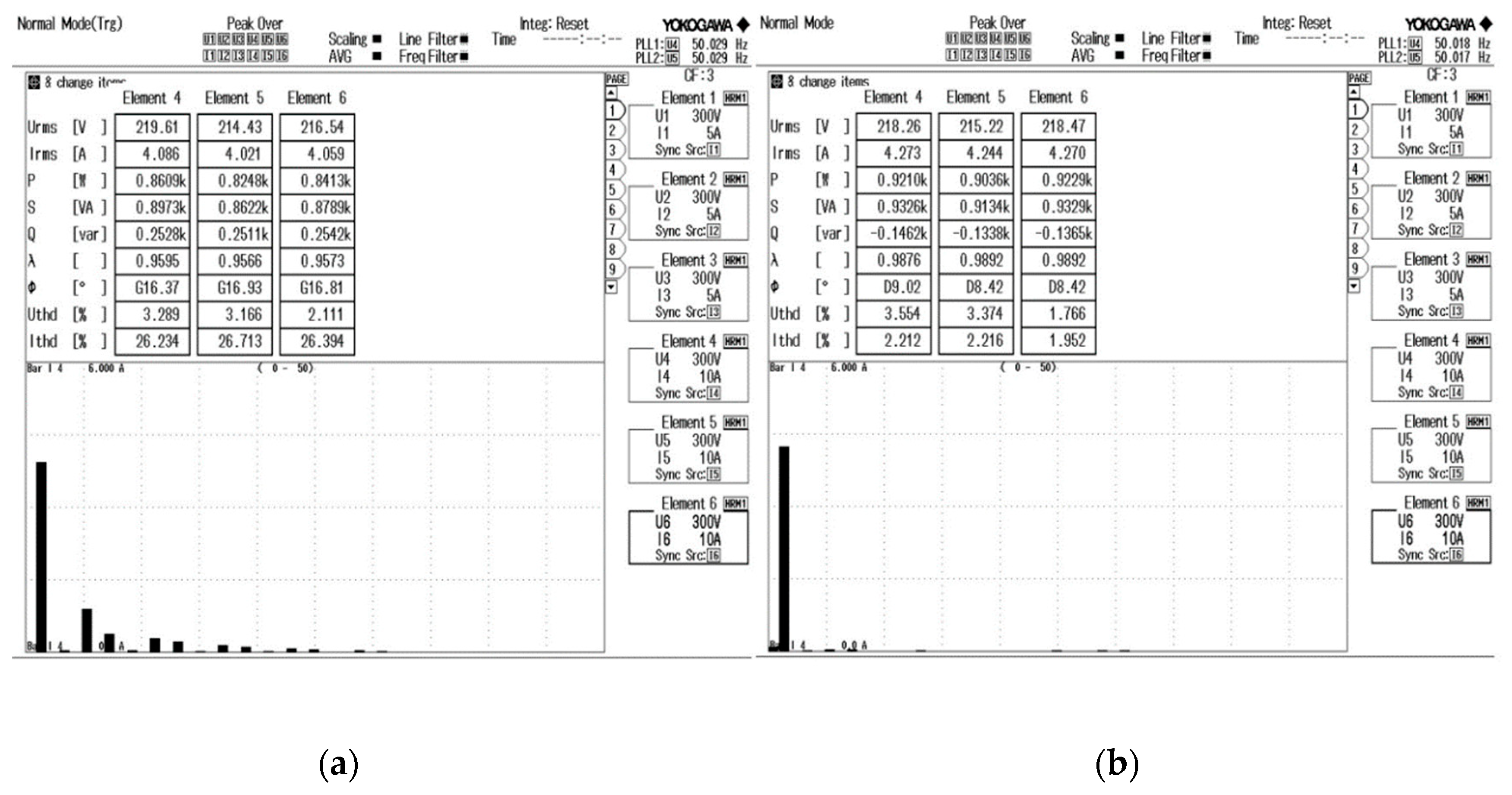
4.1.1. Performance of the Compensator for Current Source Type Nonlinear Load
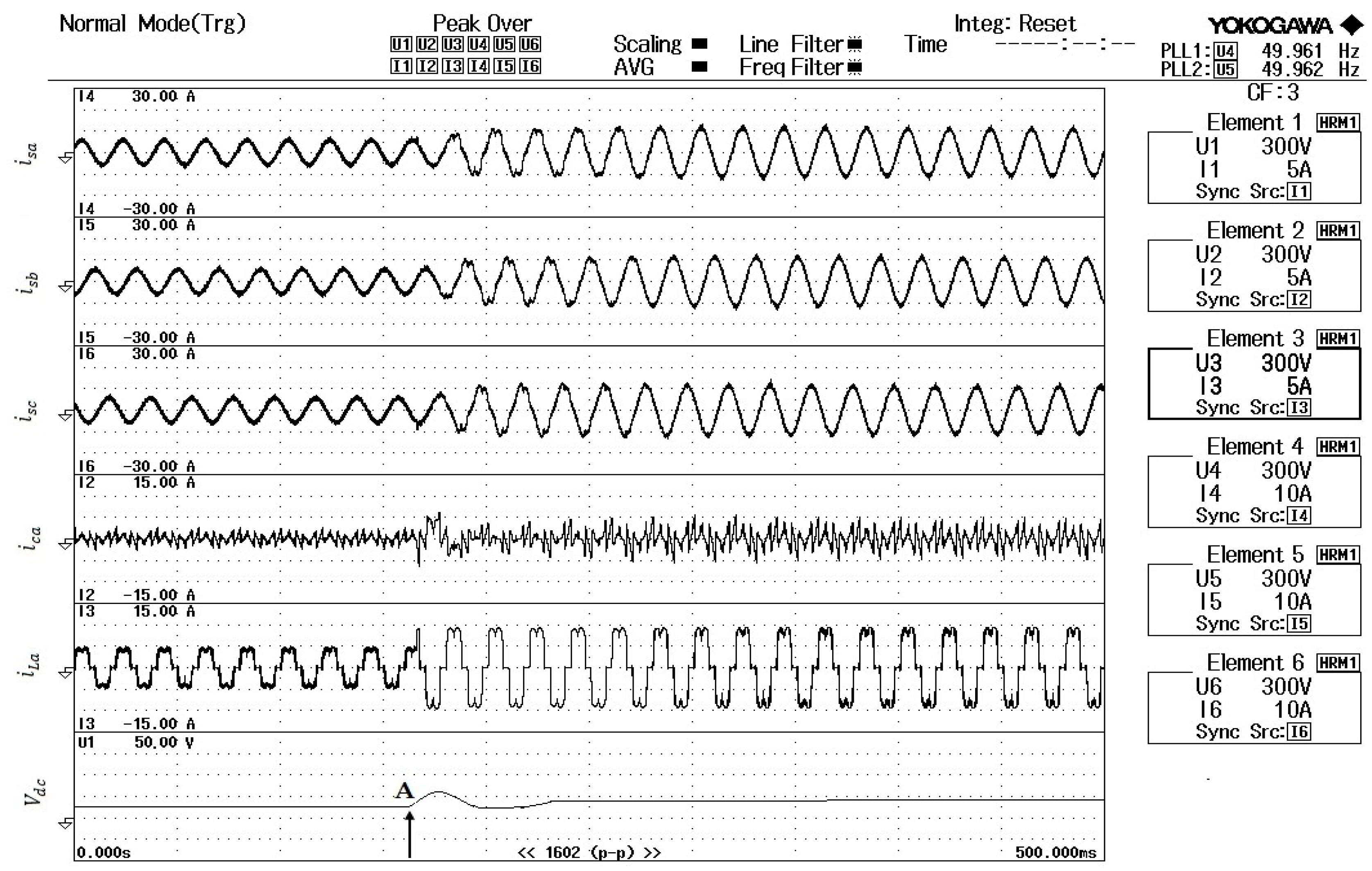
4.1.2. Performance of the Compensator for Varying Current Source Type Nonlinear Load
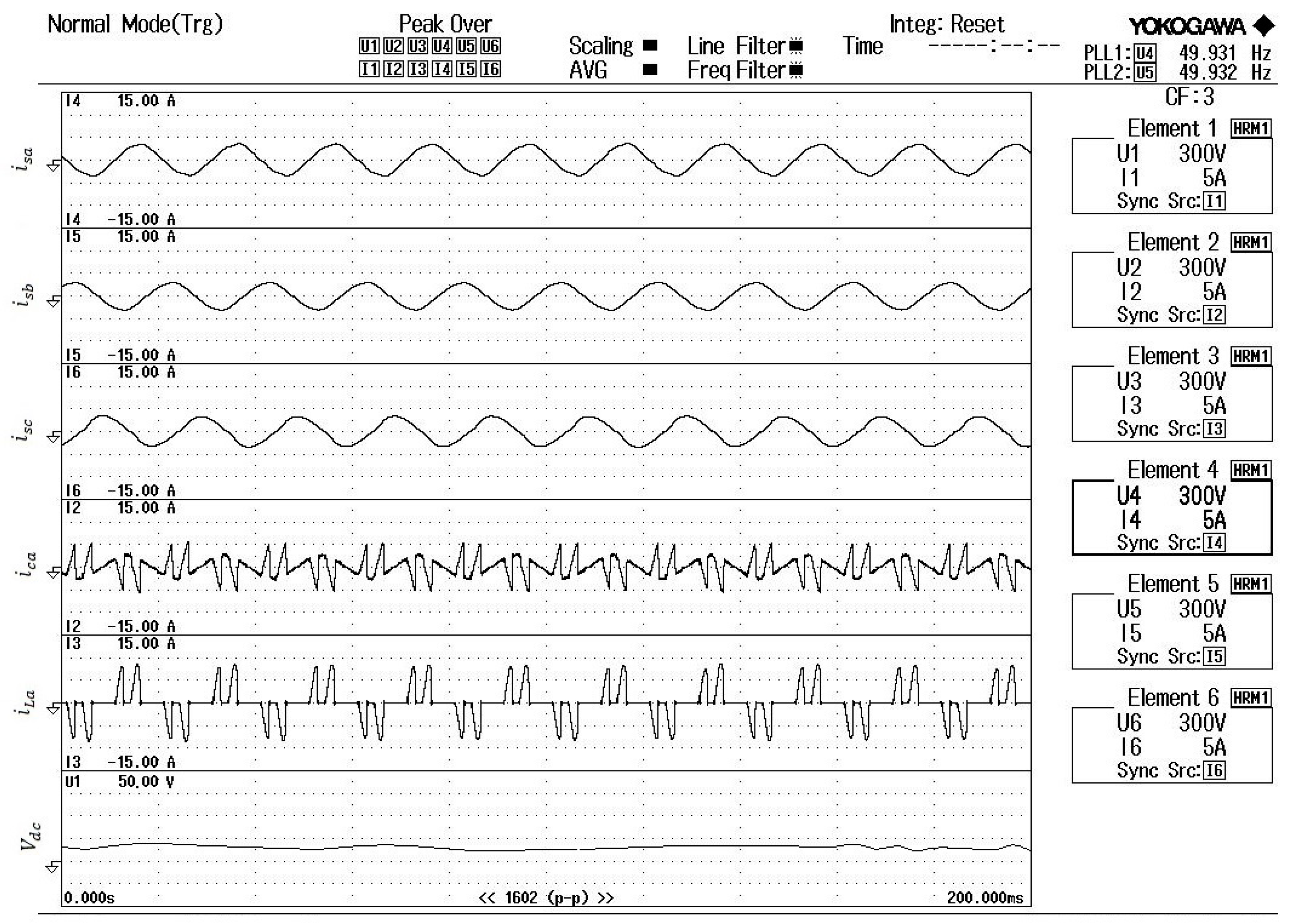
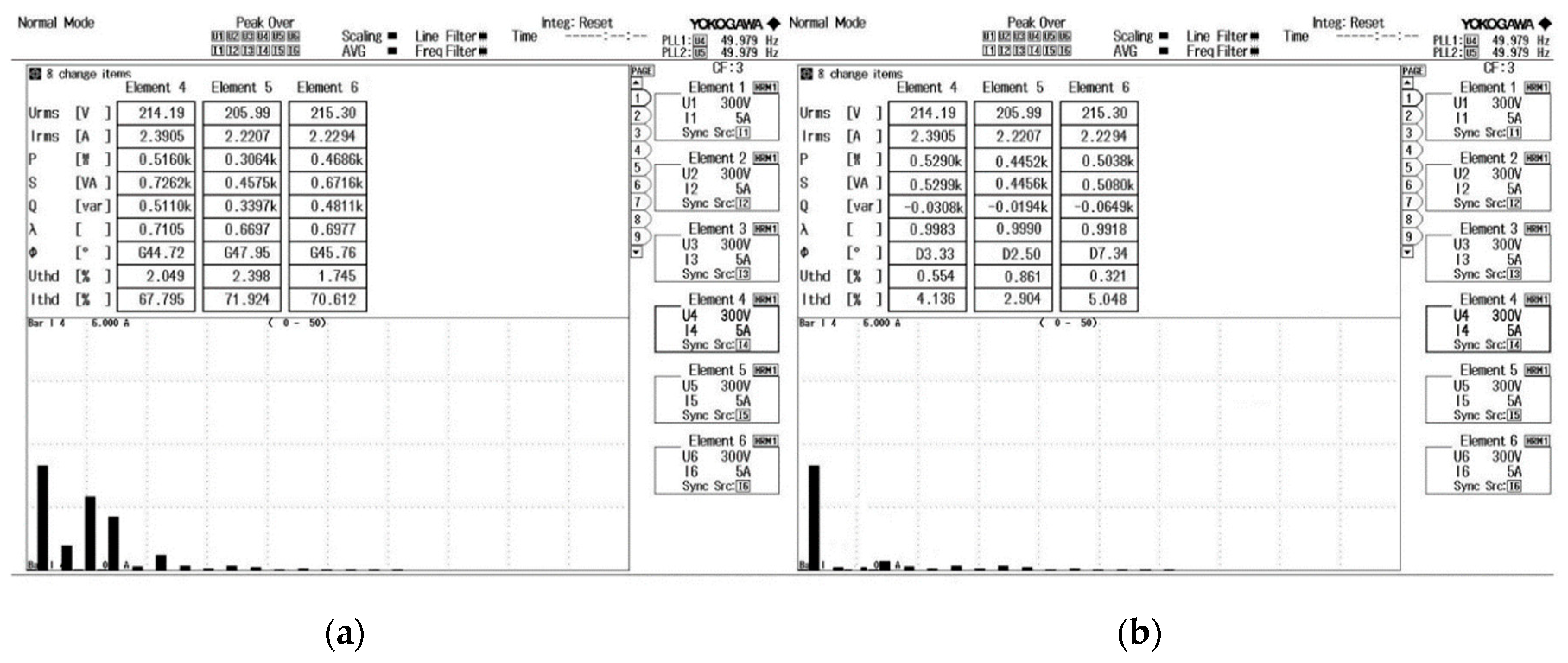
4.1.3. Performance of the Compensator for Voltage Source Type Nonlinear Load
4.1.4. Performance Comparison and Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Peng, F.Z. Harmonic sources and filtering approaches. IEEE Ind. Appl. Mag. 2001, 7, 18–25. [Google Scholar] [CrossRef]
- Dugan, R.C.; Mark, F.M.; Surya, S.; Wayne, H.B. Electrical Power Systems Quality, 3rd ed.; Tata McGraw-Hill Education: Noida, India, 2012; ISBN 9780071761550. [Google Scholar]
- Singh, B.; Singh, B.N.; Chandra, A.; Al-Haddad, K.; Pandey, A.; Kothari, D.P. A review of three-phase improved power quality AC-DC converters. IEEE Trans. Ind. Electron. 2004, 51, 641–660. [Google Scholar] [CrossRef]
- Wagner, V.E.; Balda, J.C.; Griffith, D.C.; McEachern, A.; Barnes, T.M.; Hartmann, D.P.; Phileggi, D.J.; Emannuel, A.E.; Horton, W.F.; Reid, W.E.; et al. Effects of harmonics on equipment. IEEE Trans. Power Deliv. 1993, 8, 672–680. [Google Scholar] [CrossRef]
- Das, J.C. Passive filters-potentialities and limitations. IEEE Trans. Ind. Appl. 2004, 40, 232–241. [Google Scholar] [CrossRef]
- Singh, B.; Al-Haddad, K.; Chandra, A. A review of active filters for power quality improvement. IEEE Trans. Ind. Electron. 1999, 46, 960–971. [Google Scholar] [CrossRef] [Green Version]
- Akagi, H. New trends in active filters for power conditioning. IEEE Trans. Ind. Appl. 1996, 32, 1312–1322. [Google Scholar] [CrossRef] [Green Version]
- Lam, C.-S.; Wong, M.-C. Design and Control of Hybrid Active Power Filters; Springer: Berlin, Germany, 2014. [Google Scholar]
- Singh, B.; Verma, V.; Chandra, A.; Al-Haddad, K. Hybrid filters for power quality improvement. IEE Proc.-Gener. Transm. Distrib. 2005, 152, 365–378. [Google Scholar] [CrossRef]
- Rivas, D.; Morán, L.; Dixon, J.W.; Espinoza, J.R. Improving passive filter compensation performance with active techniques. IEEE Trans. Ind. Electron. 2003, 50, 161–170. [Google Scholar] [CrossRef]
- Samadaei, E.; Lesan, S.; Cherati, S.M. A new schematic for hybrid active power filter controller. In Proceedings of the 2011 IEEE Applied Power Electronics Colloquium (IAPEC), Johor Bahru, Malaysia, 18–19 April 2011; pp. 143–148. [Google Scholar]
- Mendalek, N.; Al-Haddad, K.; Fnaiech, F.; Dessaint, L.A. Nonlinear control technique to enhance dynamic performance of a shunt active power filter. IEE Proc.-Electr. Power Appl. 2003, 150, 373–379. [Google Scholar] [CrossRef]
- Rahmani, S.; Hamadi, A.; Mendalek, N.; Al-Haddad, K. A new control technique for three-phase shunt hybrid power filter. IEEE Trans. Ind. Electron. 2009, 56, 2904–2915. [Google Scholar] [CrossRef]
- Rahmani, S.; Mendalek, N.; Al-Haddad, K. Experimental design of a nonlinear control technique for three-phase shunt active power filter. IEEE Trans. Ind. Electron. 2010, 57, 3364–3375. [Google Scholar] [CrossRef]
- Zouidi, A.; Fnaiech, F.; Al-Haddad, K. Voltage source inverter based three-phase shunt active power filter: Topology, Modeling and control strategies. In Proceedings of the 2006 IEEE International Symposium on Industrial Electronics, Montreal, QC, Canada, 9–13 July 2006; Volume 2, pp. 785–790. [Google Scholar]
- Mendalek, N.; Al-Haddad, K. Modeling and nonlinear control of shunt active power filter in the synchronous reference frame. In Proceedings of the Ninth International Conference on Harmonics and Quality of Power. Proceedings (Cat. No.00EX441), Orlando, FL, USA, 1–4 October 2000; Volume 1, pp. 30–35. [Google Scholar]
- Balasubramanian, R.; Sankaran, R.; Palani, S. Simulation and performance evaluation of shunt hybrid power filter using fuzzy logic based non-linear control for power quality improvement. Sadhana 2017, 42, 1443–1452. [Google Scholar] [CrossRef]
- Palandöken, M.; Aksoy, M.; Tümay, M. Application of fuzzy logic controller to active power filters. Electr. Eng. 2004, 86, 191–198. [Google Scholar] [CrossRef]
- Dey, P.; Mekhilef, S. Current controllers of active power filter for power quality improvement: A technical analysis. Automatika 2015, 56, 42–54. [Google Scholar] [CrossRef]
- Unnikrishnan, A.K.; Subhash Joshi, T.G.; Manju, A.S.; Joseph, A. Shunt hybrid active power filter for harmonic mitigation: A practical design approach. Sadhana 2015, 40, 1257–1272. [Google Scholar]
- Chauhan, S.K.; Shah, M.C.; Tiwari, R.R.; Tekwani, P.N. Analysis, design and digital implementation of a shunt active power filter with different schemes of reference current generation. IET Power Electron. 2013, 7, 627–639. [Google Scholar] [CrossRef]
- Cataliotti, A.; Cosentino, V. A Time-domain strategy for the measurement of IEEE standard 1459–2000 Power quantities in Non sinusoidal Three–phase and Single–phase systems. IEEE Trans. Power Deliv. 2008, 23, 2113–2123. [Google Scholar] [CrossRef]
- Cataliotti, A.; Cosentino, V. Disturbing Load Identification in Power Systems: A Single-Point Time–Domain Method Based on IEEE 1459–2000. IEEE Trans. Instrum. Meas. 2009, 58, 1436–1445. [Google Scholar] [CrossRef]
- Golestan, S.; Gurrero, J.M.; Vasquez, J.C. Three–Phase PLLs: A Review of Recent Advances. IEEE Trans. Power Electron. 2017, 32, 1894–1907. [Google Scholar] [CrossRef]
- Golestan, S.; Ge, J.M.; Vasquez, J.; Abusorrah, A.M.; Al-Turki, Y.A. Modeling, Tuning, and Performance Comparison of Second–Order-Generalized-Integrator–Based FLLs. IEEE Trans. Power Electron. 2018, 33, 10229–10239. [Google Scholar] [CrossRef]
- Balasubramanian, R.; Palani, S. Simulation and performance evaluation of shunt hybrid power filter for power quality improvement using PQ theory. Int. J. Electr. Comput. Eng. 2016, 6, 2603–2609. [Google Scholar] [CrossRef]
- Dey, P.; Mekhilef, S. Synchronous reference frame based control technique for shunt hybrid active power filter under non-ideal voltage. In Proceedings of the 2014 IEEE Innovative Smart Grid Technologies-Asia (ISGT ASIA), Kuala Lumpur, Malaysia, 20–23 May 2014; pp. 481–486. [Google Scholar]
- Bhattacharya, A.; Chakraborty, C.; Bhattacharya, S. Parallel-connected shunt hybrid active power filters operating at different switching frequencies for improved performance. IEEE Trans. Ind. Electron. 2012, 59, 4007–4019. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Phase Voltage and Frequency | Vsrms = 230 V and fs = 50 Hz |
|---|---|
| Impedance of the line | Rs = 0.1 Ω, Ls = 4 mH |
| Nonlinear load of current source type | RL = 50 Ω, LL = 10 mH |
| Nonlinear load of voltage source type 5th tuned PPF parameters 7th tuned PPF parameters | RL = 32 Ω, CL = 1000 µF R = 0.1 Ω, L = 10 mH, C = 40 µF R = 0.1 Ω, L = 7 mH, C = 30 µF |
| DClink voltage and capacitance | Vdc = 25 V, Cdc = 6600 μF |
| Parameters of the outer loop PI controller | k1 = 0.22 and k2 = 15.85 |
| Inner loop PI controller parameters | KP = 0.6 and KI = 1.2 |
| Active Power Filter | Intelligent Power Module (IPM) PEC16DSMO1 with 6 IGBT Switches |
|---|---|
| IGBT rating | 25 A, 1200 V |
| Switching frequency of APF switches | 2 kHz |
| Current sensors | LTS 25-NP |
| Voltage sensors | LV 25-P |
| Filter inductors | 7 mH and 10 mH |
| Filter capacitors | 30 µF and 40 µF |
| DC link capacitor | 6400 µF |
| Control Methods | SRF Theory-Based Nonlinear Control for SHAPF [13] | p-q Theory-Based Control for SHAPF [26] | SRF Theory-Based Control for SHAPF [27] | Parallel Connected SHAPF [28] |
|---|---|---|---|---|
| THD% Three-phase rectifier-fed RL load | 4.6 | 4.32 | - | 4.3 |
| THD% Three-phase rectifier-fed RC load | 4.08 | 4.15 | - | - |
| Unbalanced load % THD | 2.29 to 4.80 | - | 1.18 to 2 | 4.5 to 4.7 |
| DC link voltage | 25 V APF rating is less | 50 V APF rating is moderate | 220 V APF rating is more | 26 V APF rating is less |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Balasubramanian, R.; Parkavikathirvelu, K.; Sankaran, R.; Amirtharajan, R. Design, Simulation and Hardware Implementation of Shunt Hybrid Compensator Using Synchronous Rotating Reference Frame (SRRF)-Based Control Technique. Electronics 2019, 8, 42. https://doi.org/10.3390/electronics8010042
Balasubramanian R, Parkavikathirvelu K, Sankaran R, Amirtharajan R. Design, Simulation and Hardware Implementation of Shunt Hybrid Compensator Using Synchronous Rotating Reference Frame (SRRF)-Based Control Technique. Electronics. 2019; 8(1):42. https://doi.org/10.3390/electronics8010042
Chicago/Turabian StyleBalasubramanian, R., K. Parkavikathirvelu, R. Sankaran, and Rengarajan Amirtharajan. 2019. "Design, Simulation and Hardware Implementation of Shunt Hybrid Compensator Using Synchronous Rotating Reference Frame (SRRF)-Based Control Technique" Electronics 8, no. 1: 42. https://doi.org/10.3390/electronics8010042