Impact Responses and Parameters Sensitivity Analysis of Electric Wheelchairs


Abstract
:Featured Application
Abstract
1. Introduction
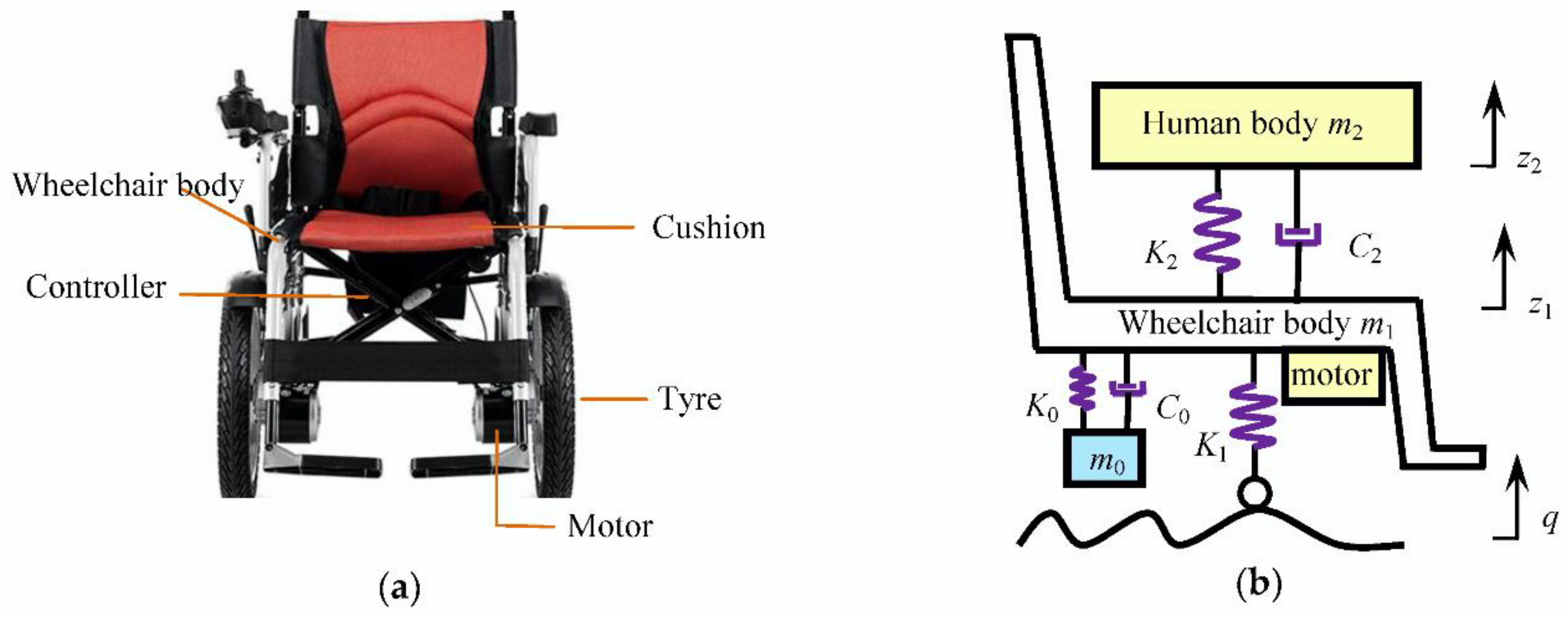
2. Modeling of the Human-Wheelchair System with DA
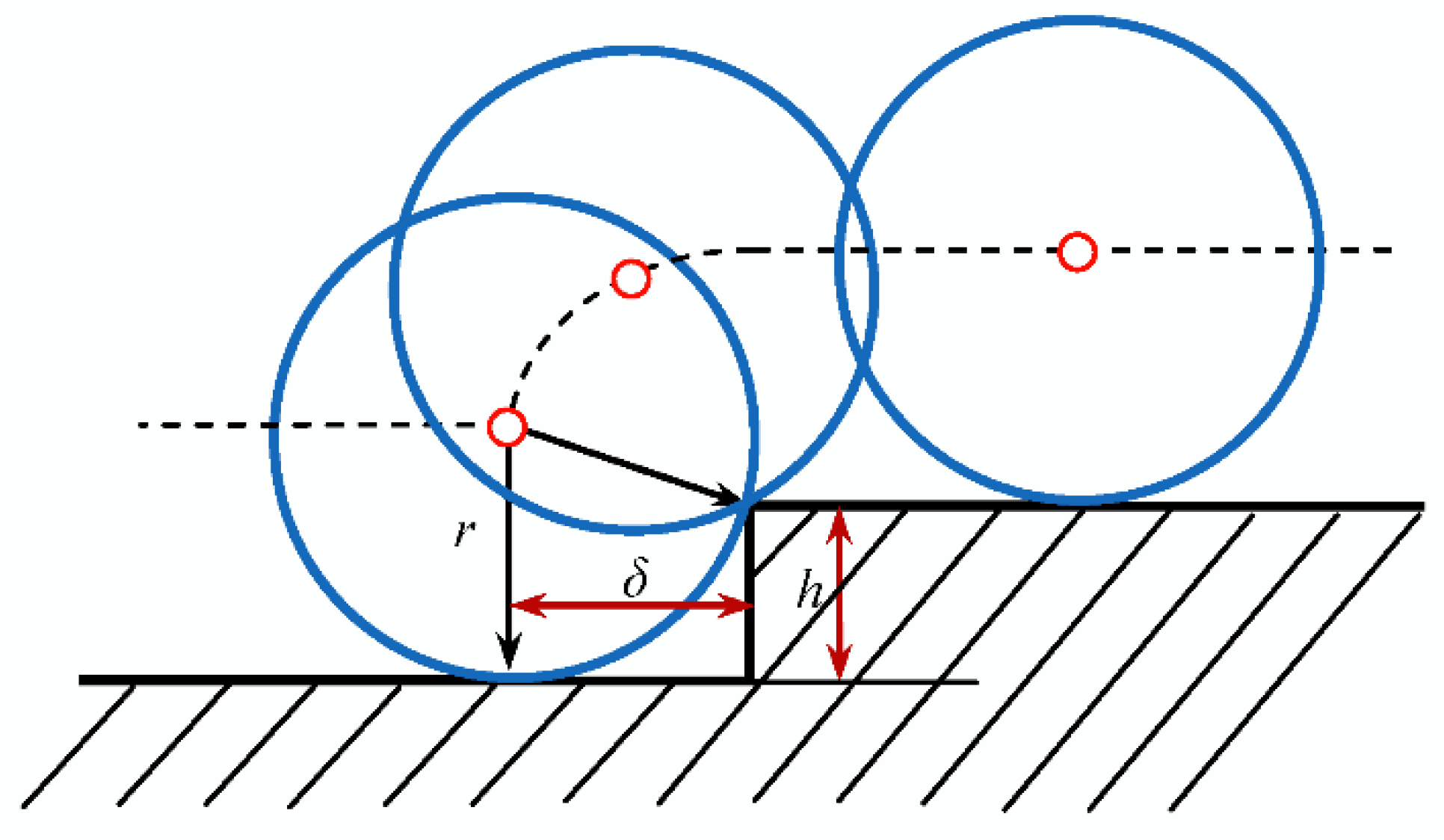
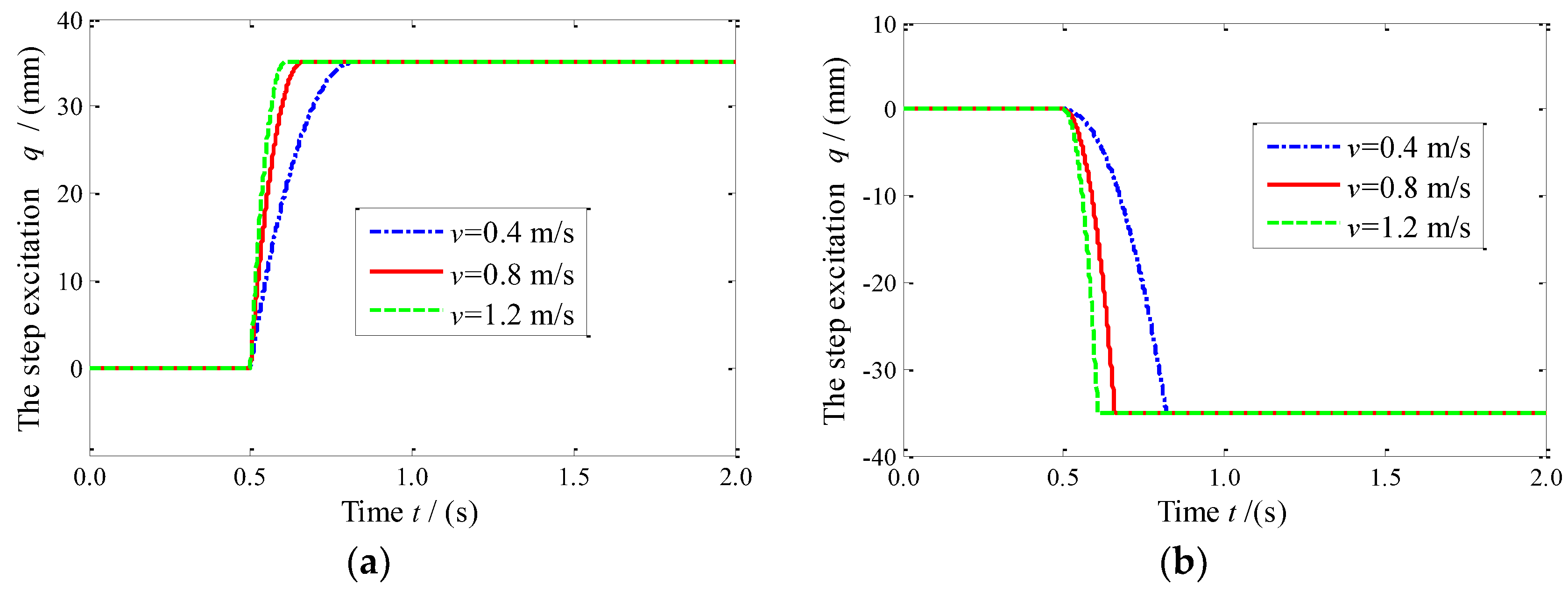
3. Modeling of the Step Road Excitation
4. Evaluation Indexes
- ,
- ,
- ,
- ,
- ,
- , .
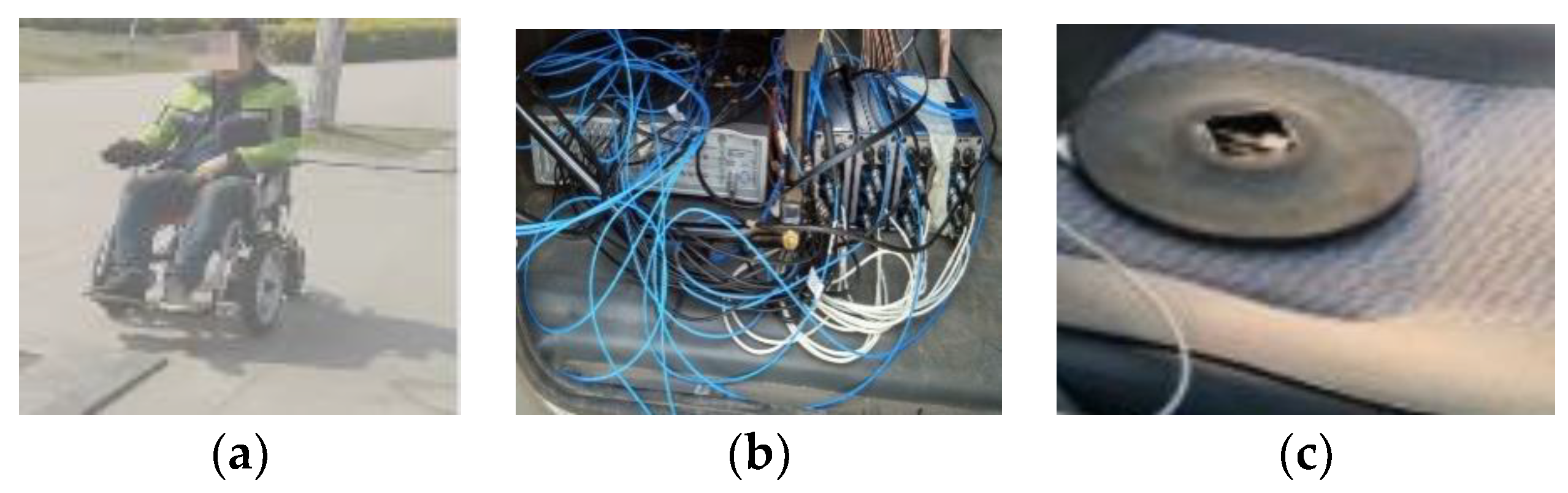
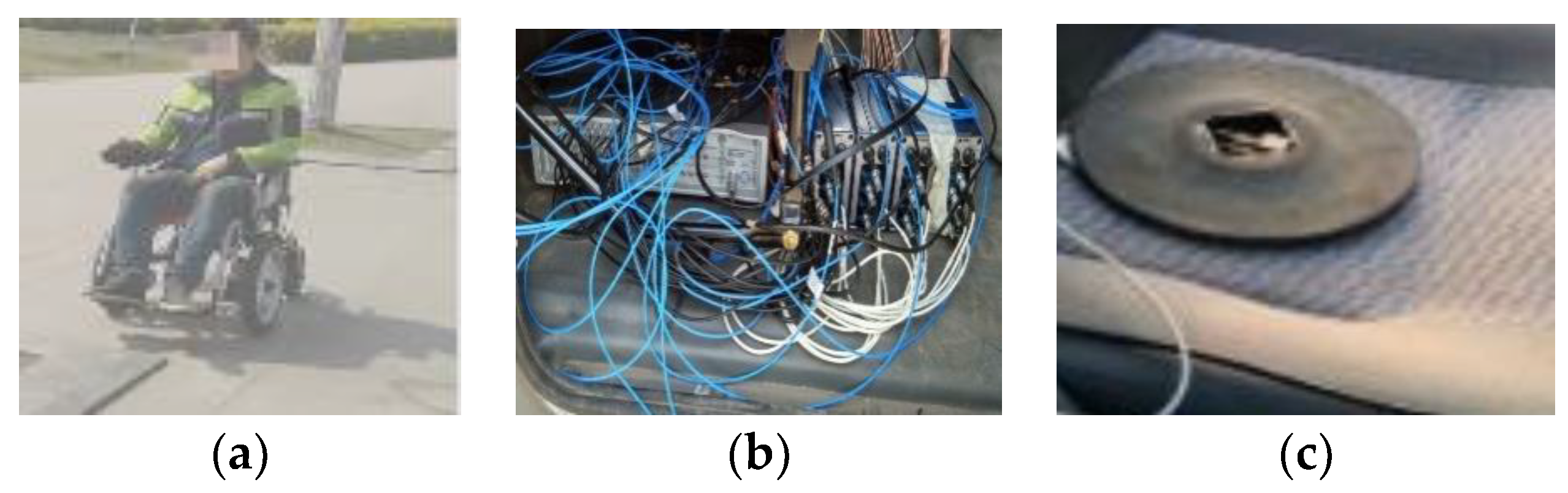
5. Test Verification
6. Comparison Analysis of Performances
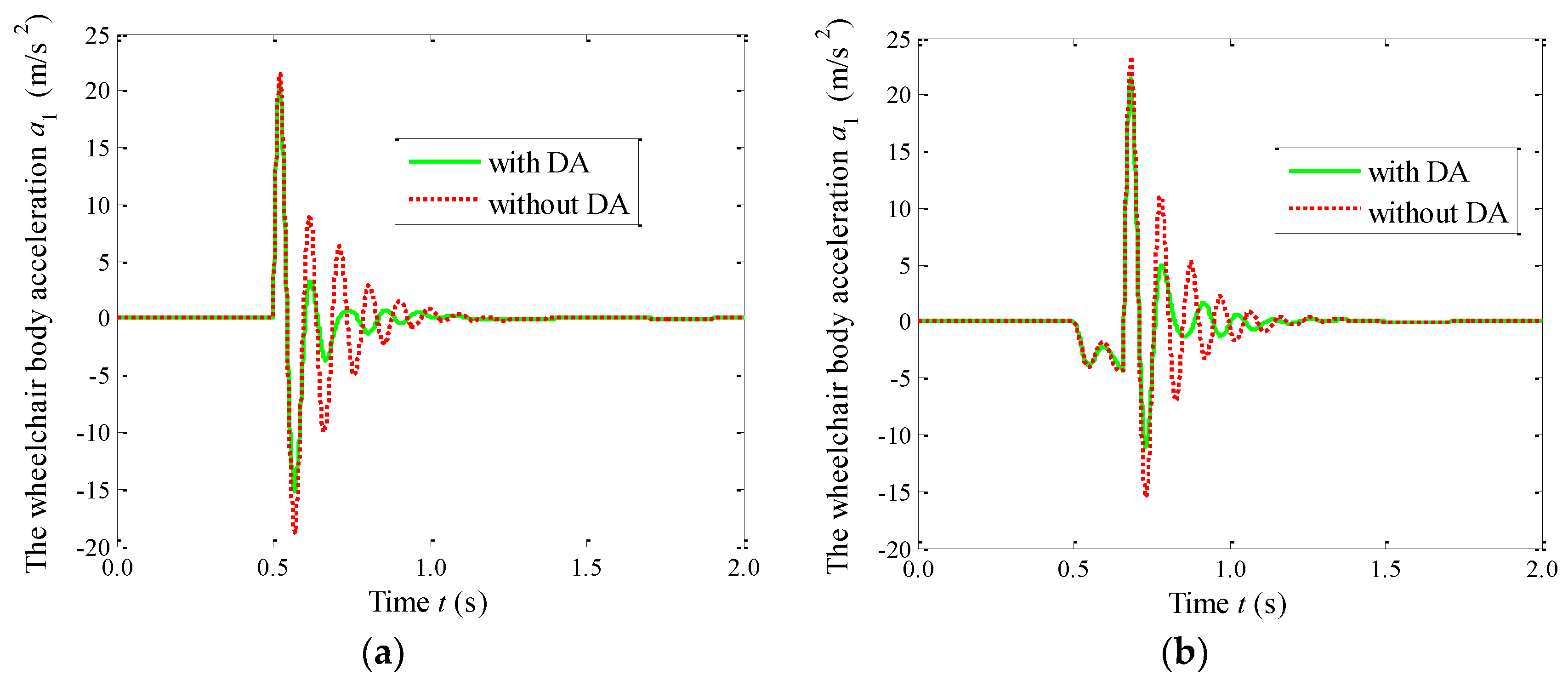
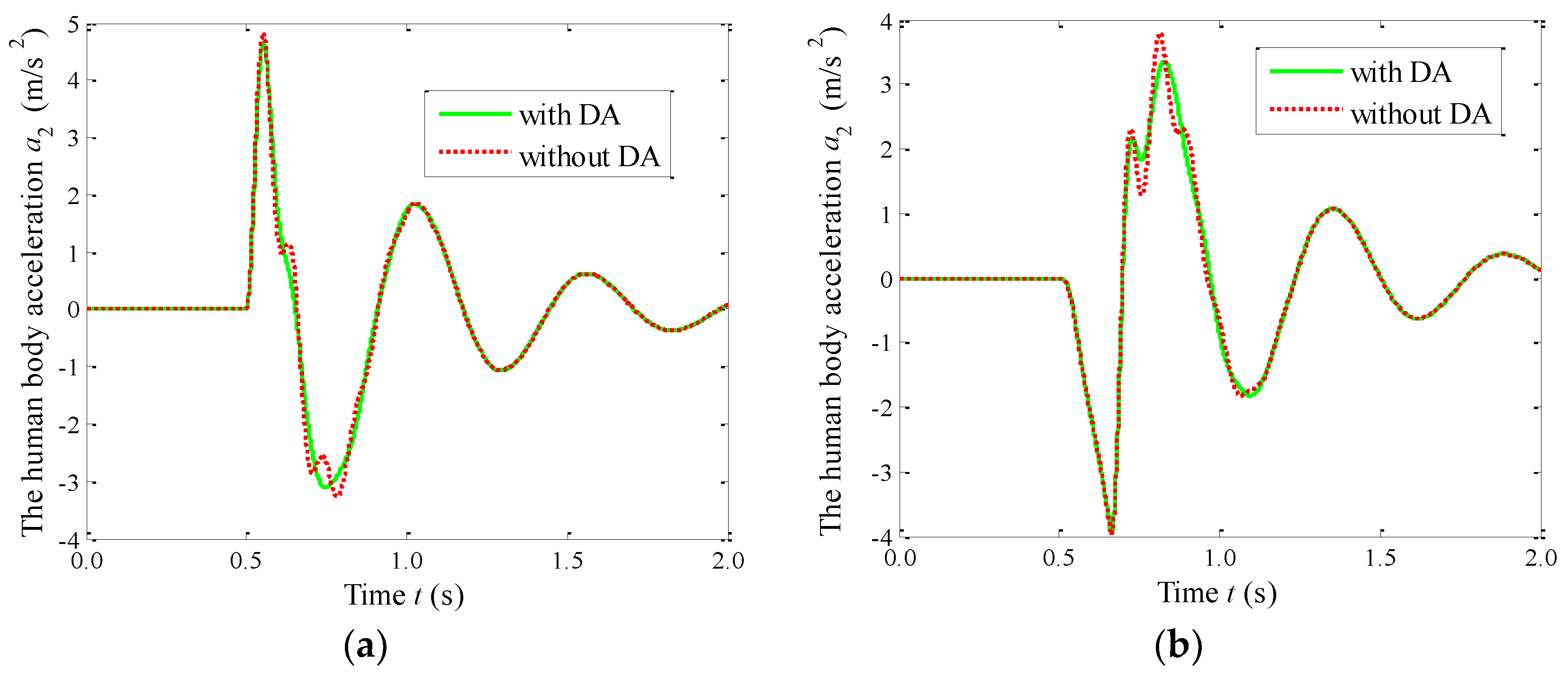
6.1. The Time Domain Responses
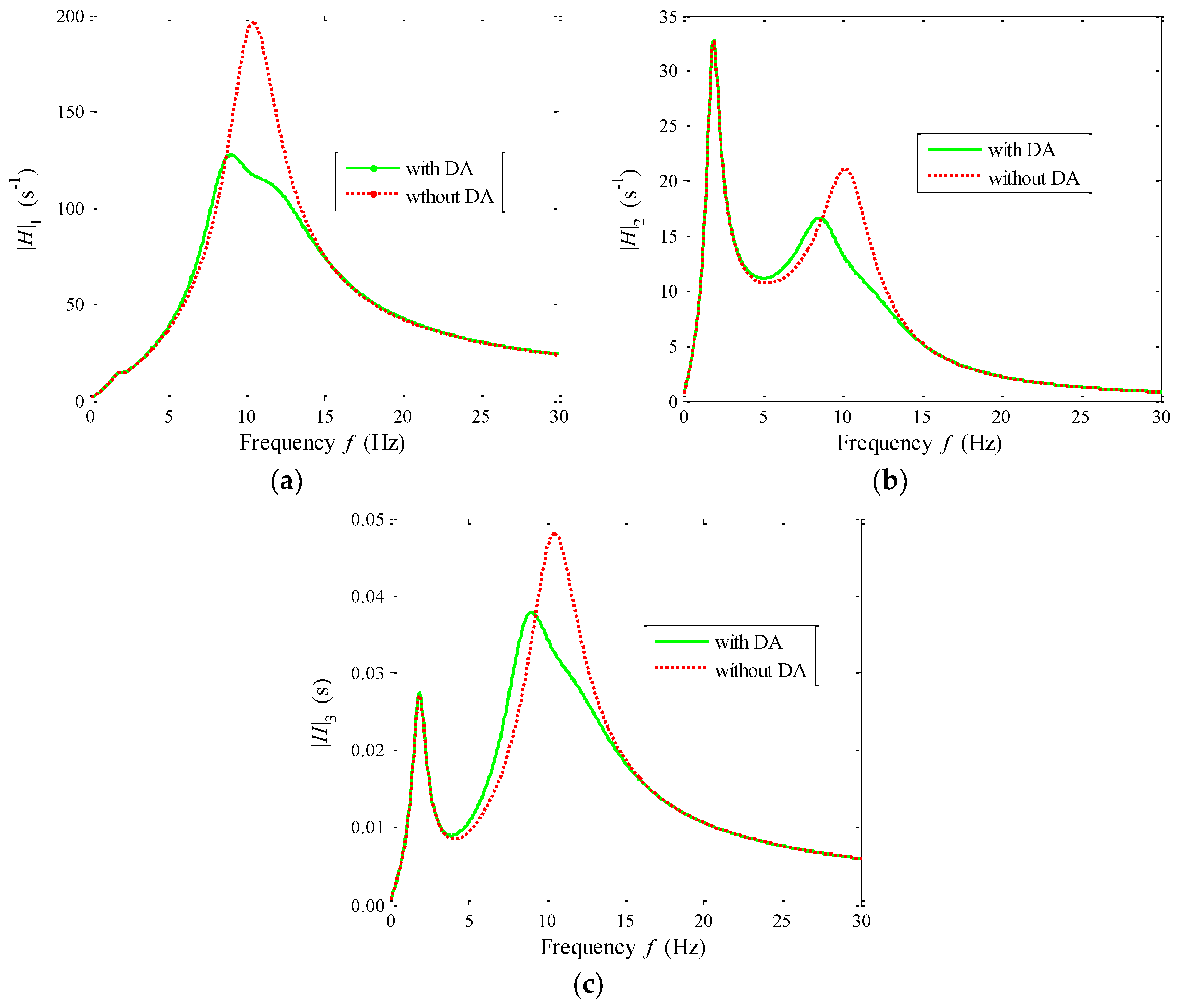
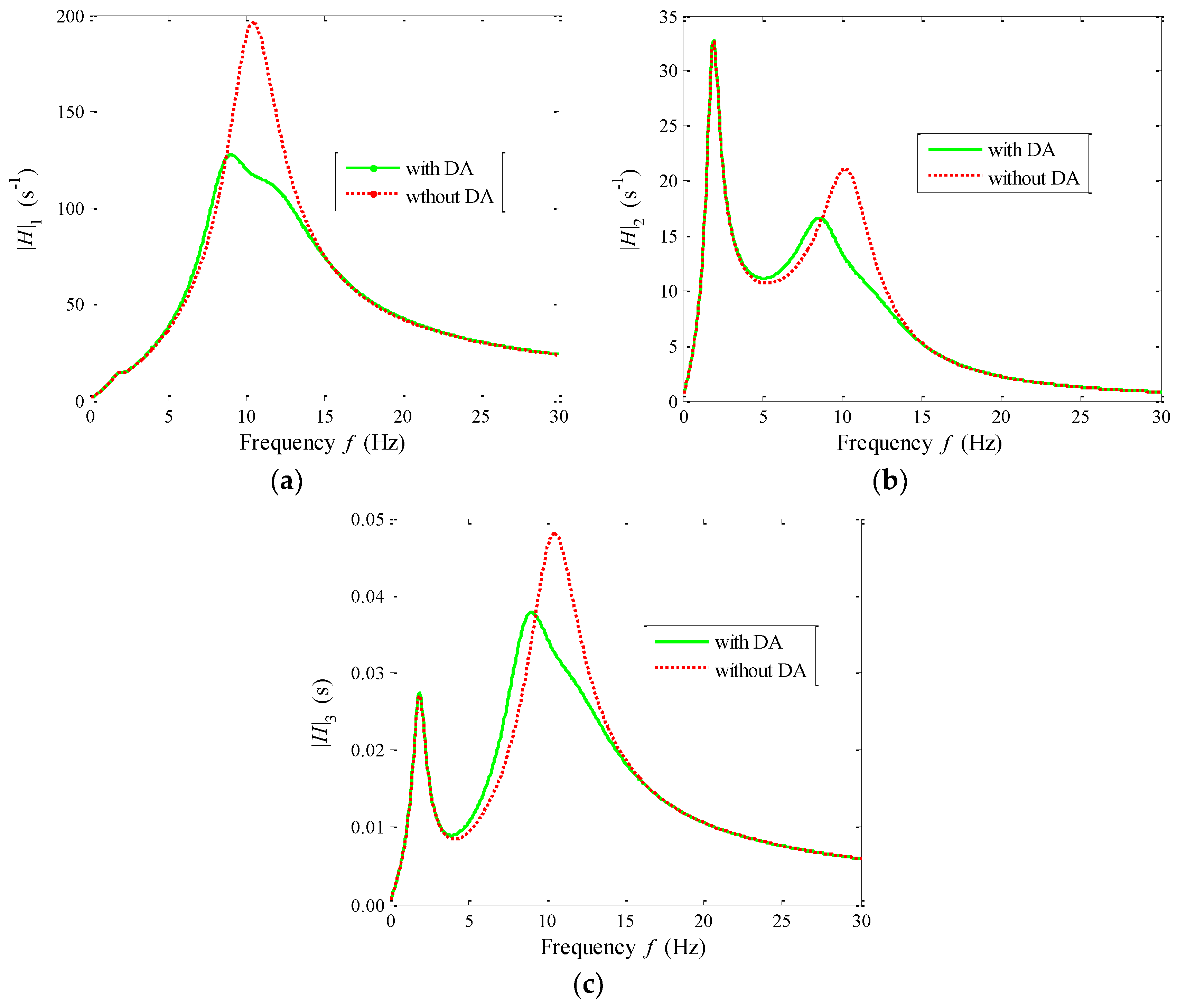
6.2. The Frequency Responses
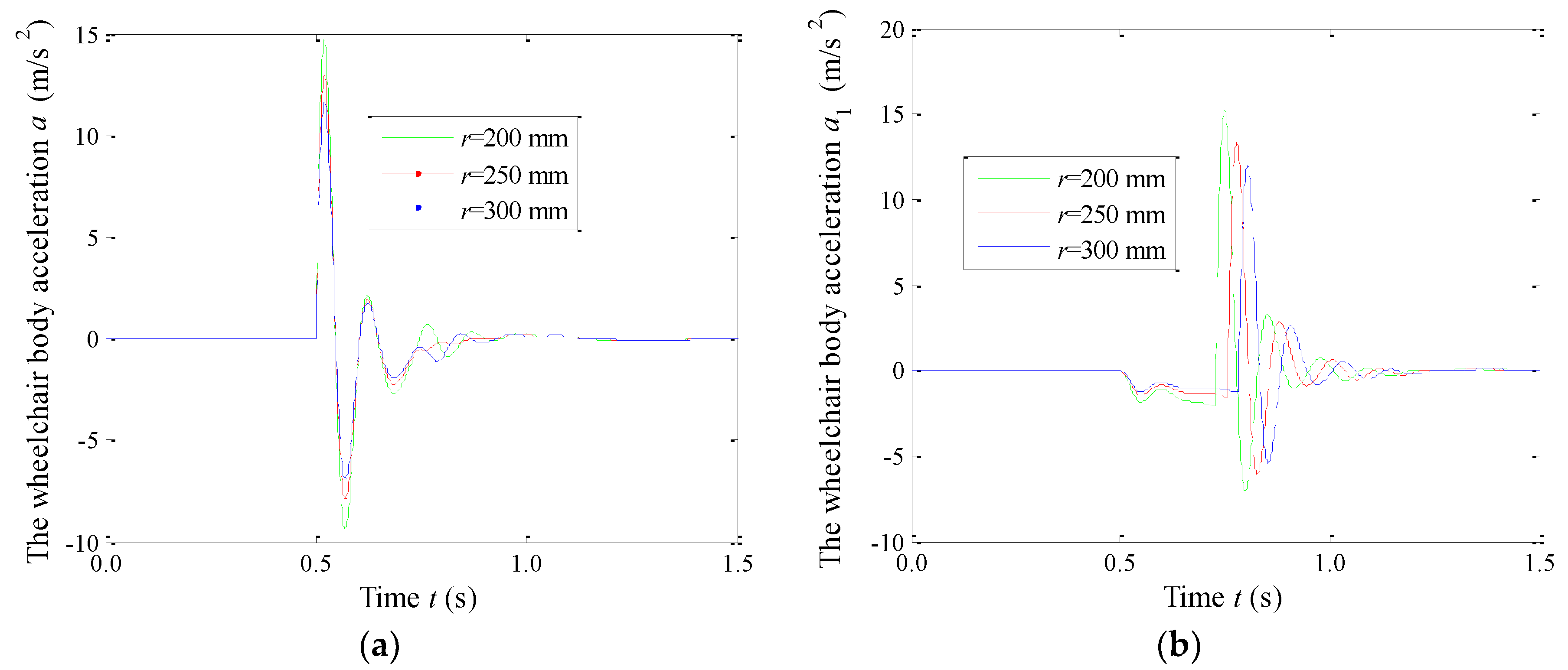
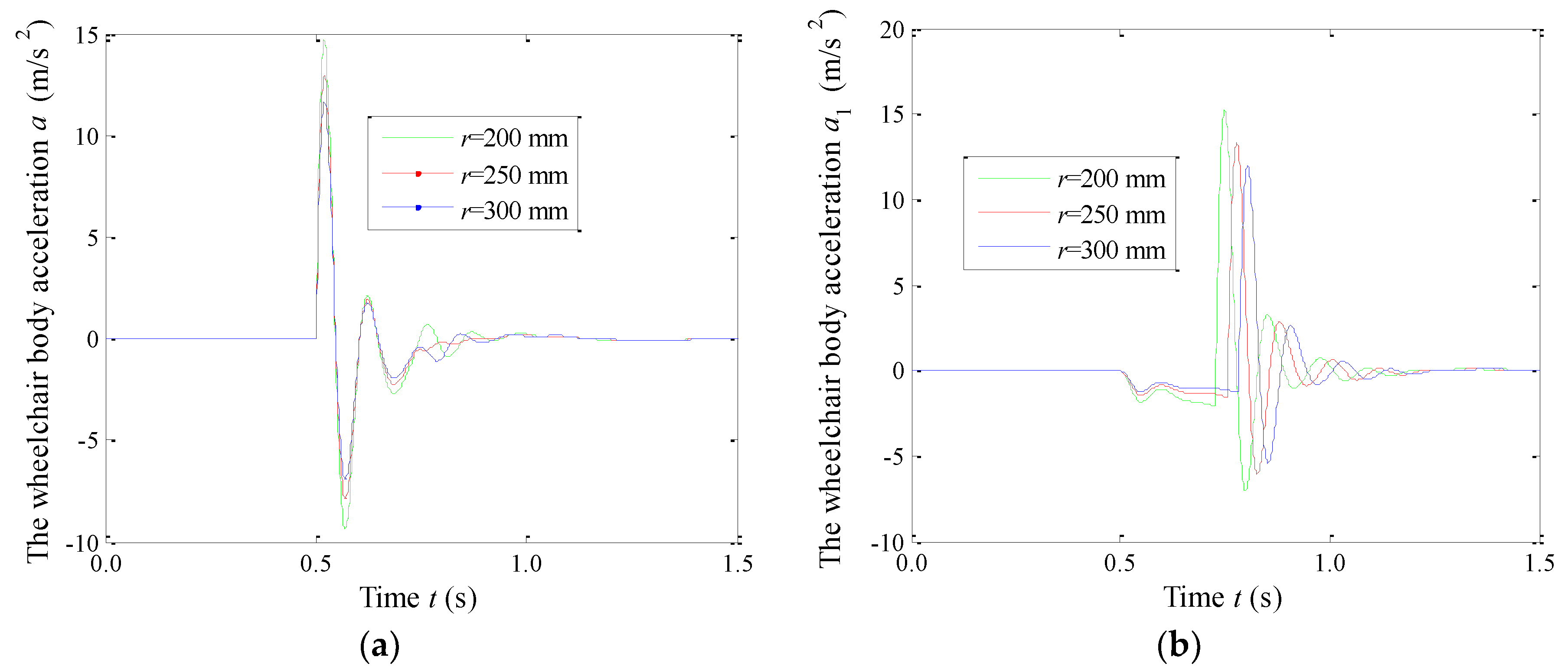
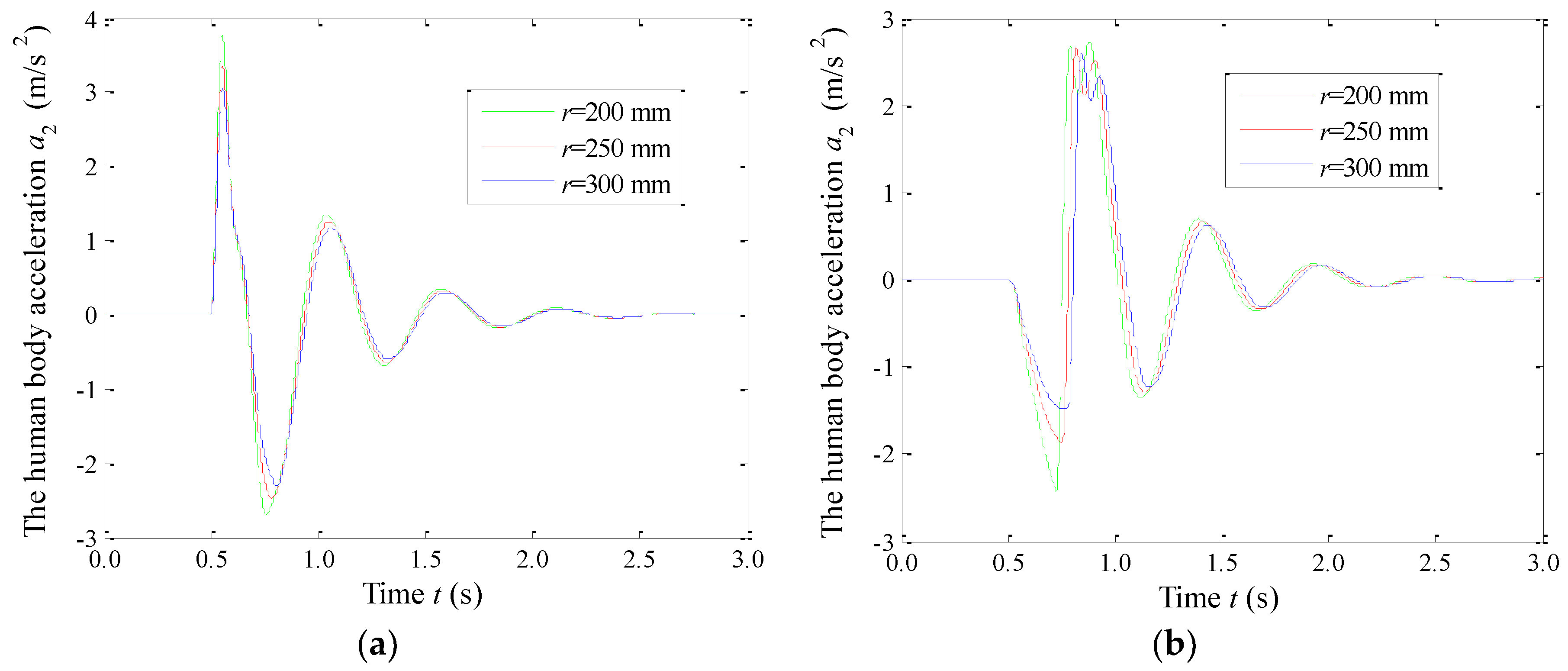
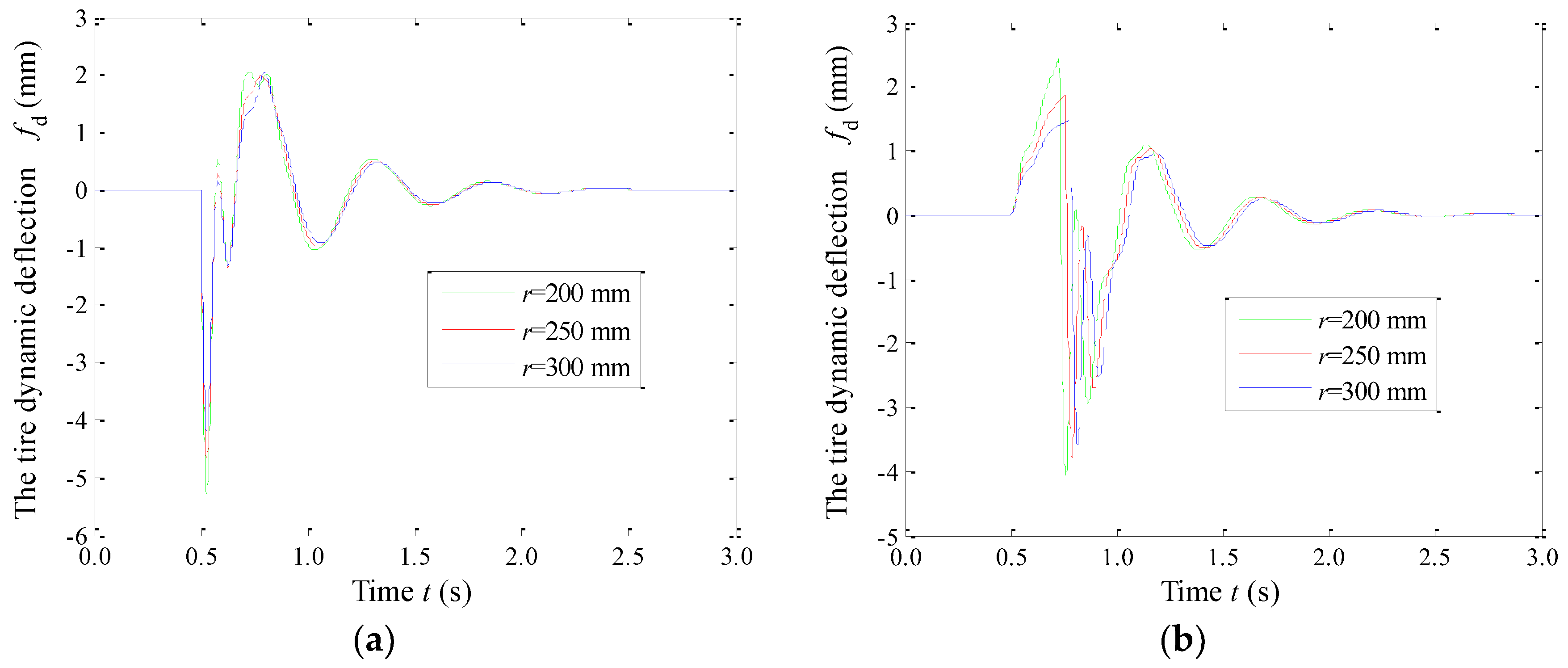
7. Influences of the Tire Static Radius r on the Vibration Behaviors
8. Sensitivity Analysis of the Impact Responses to the Characteristic Parameters
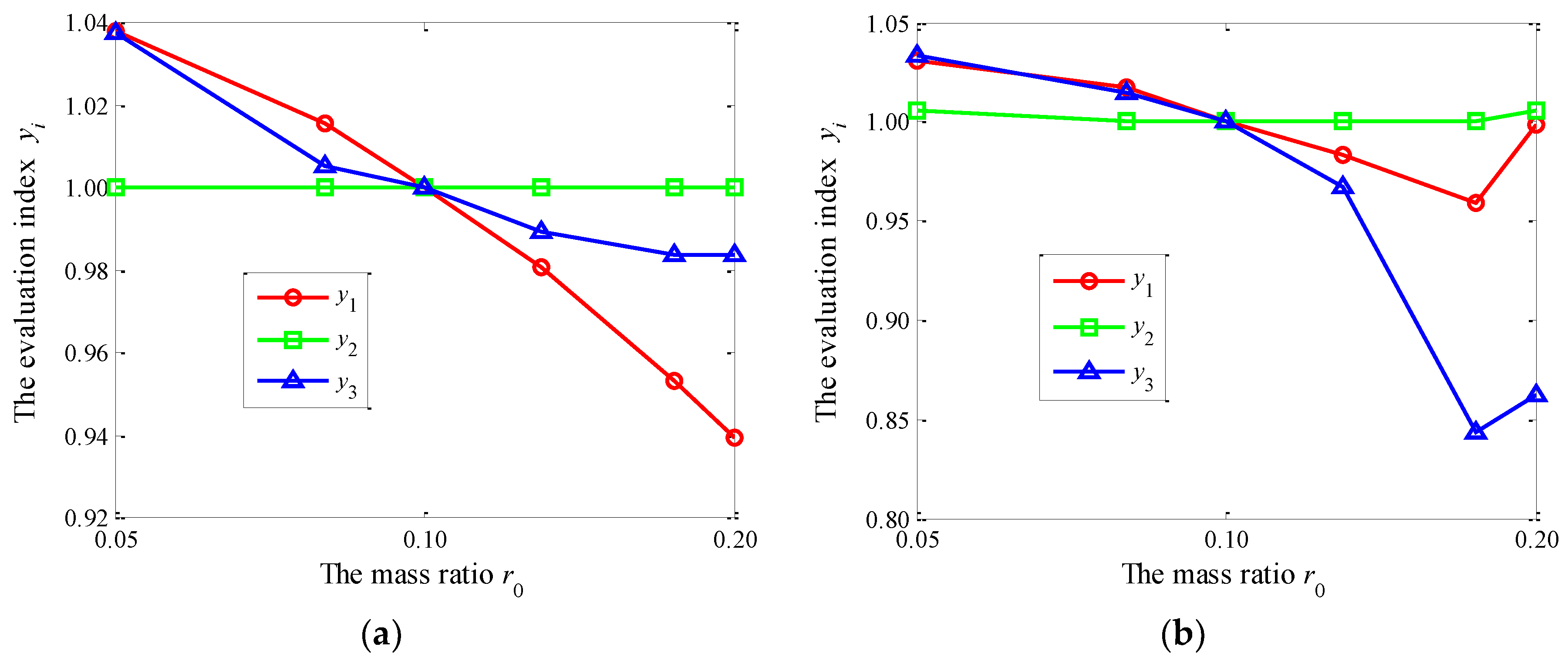
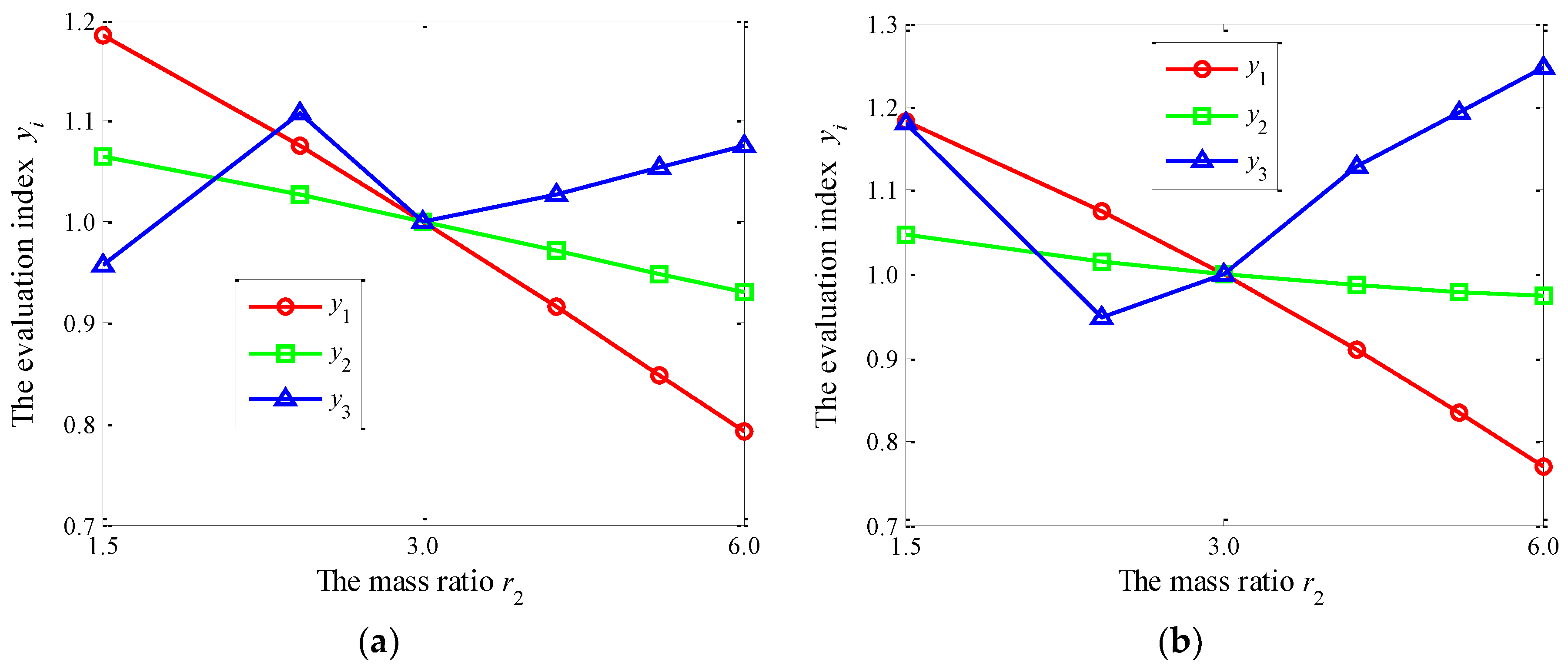
8.1. Influences of the Mass Ratios r0 and r2
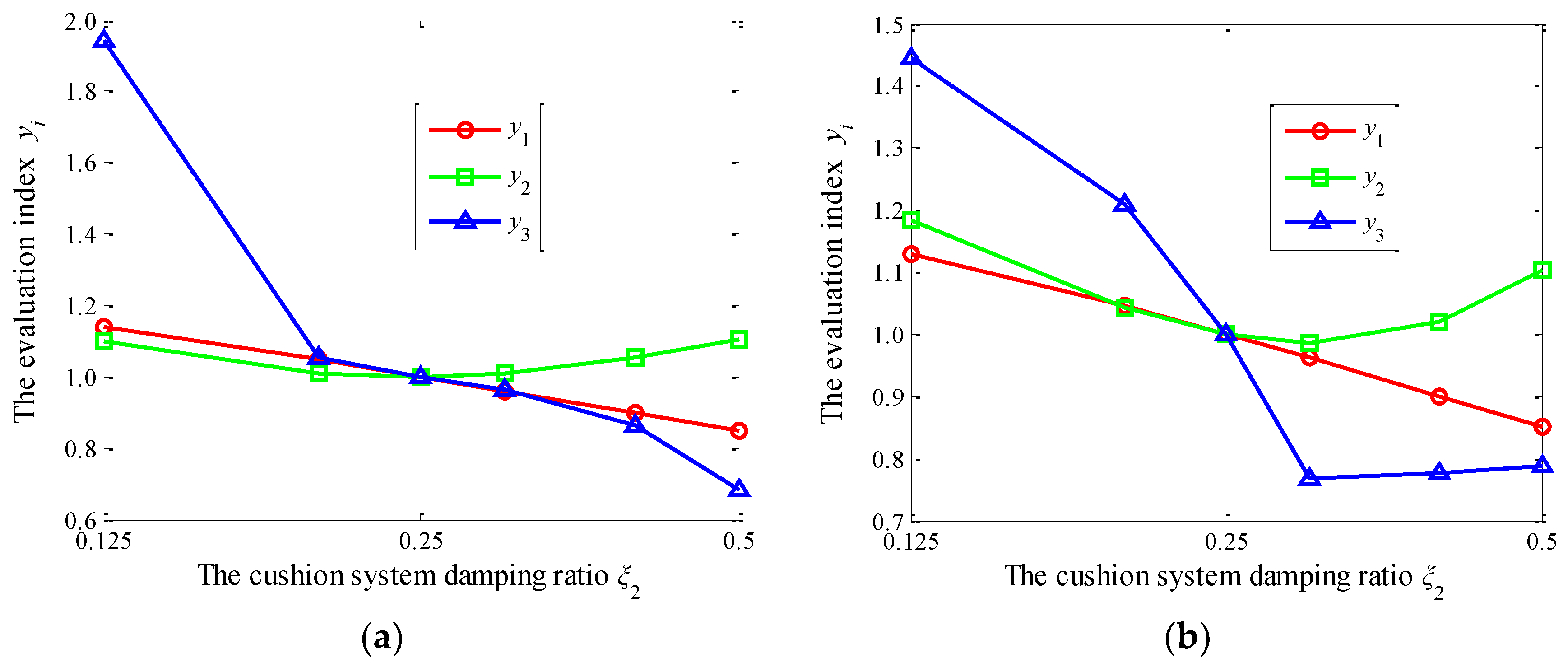
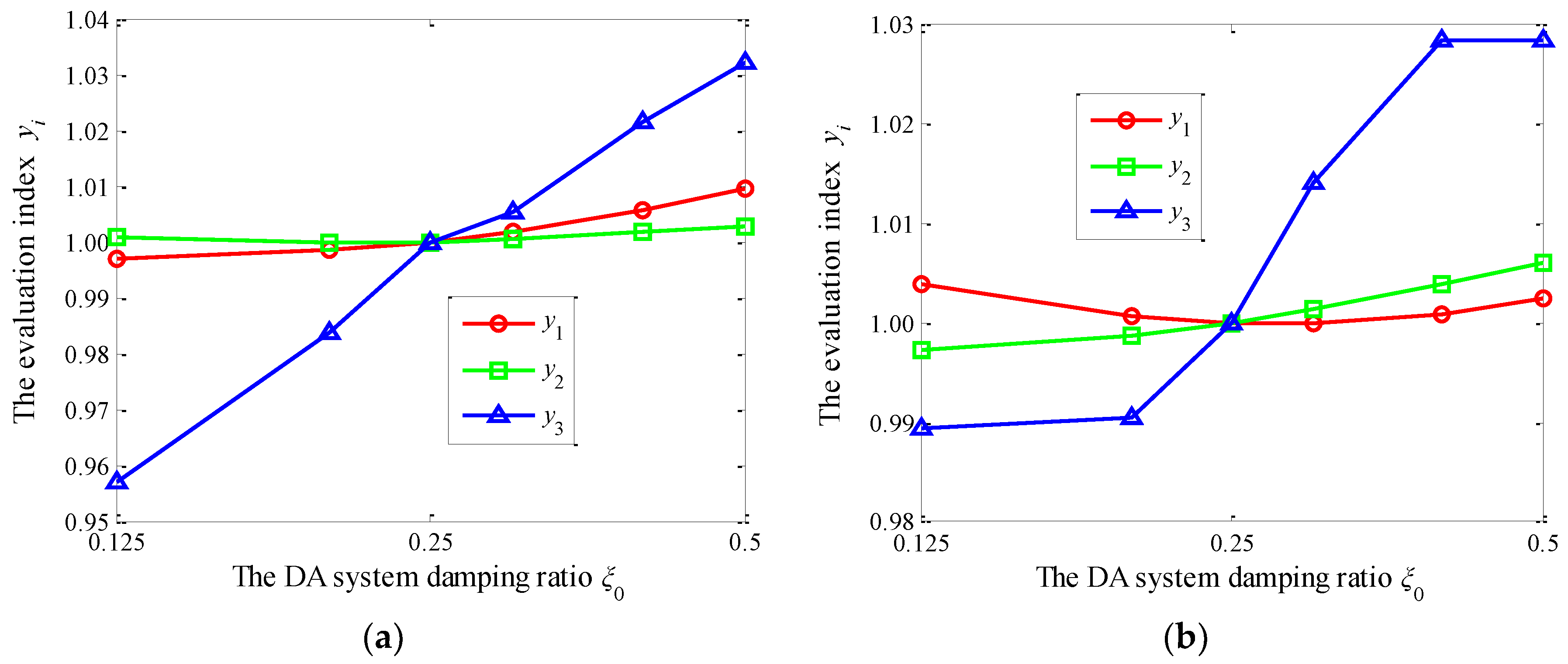
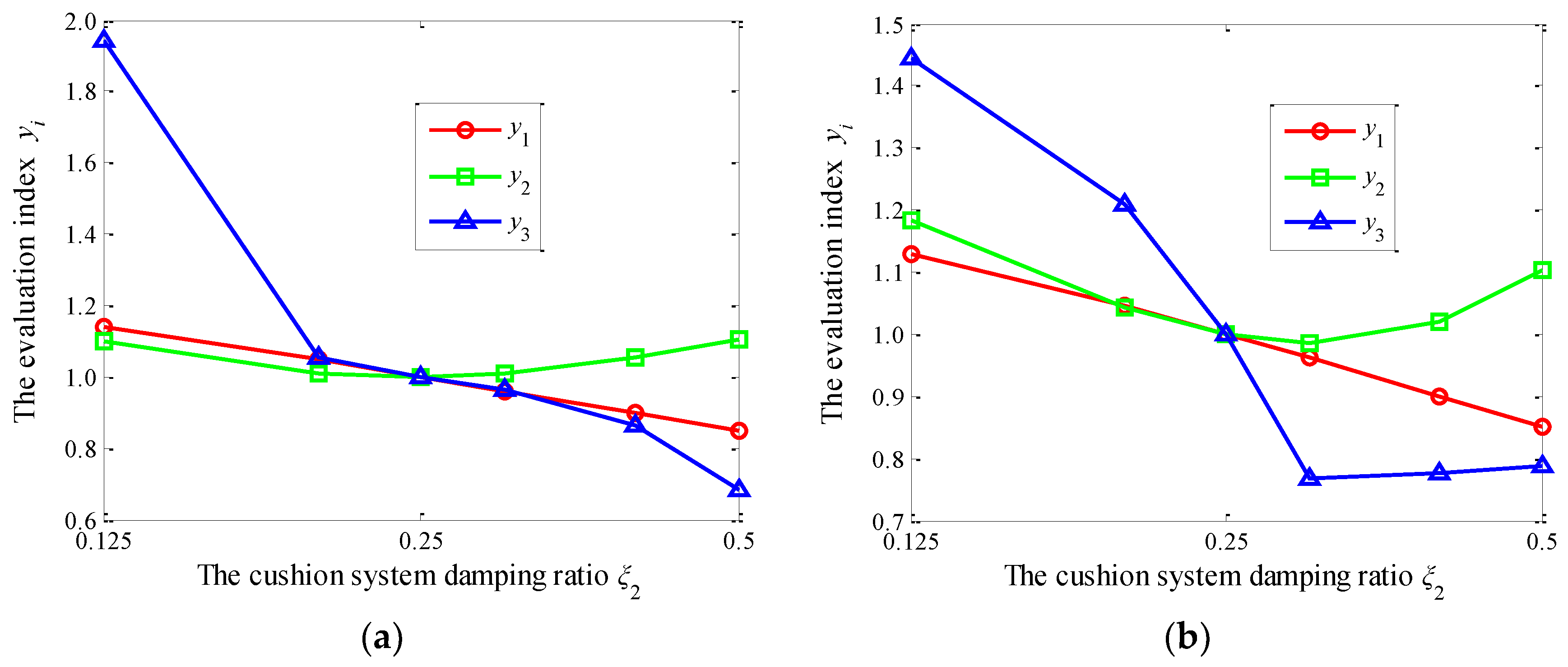
8.2. Influences of the Damping Ratios ξ0 and ξ2
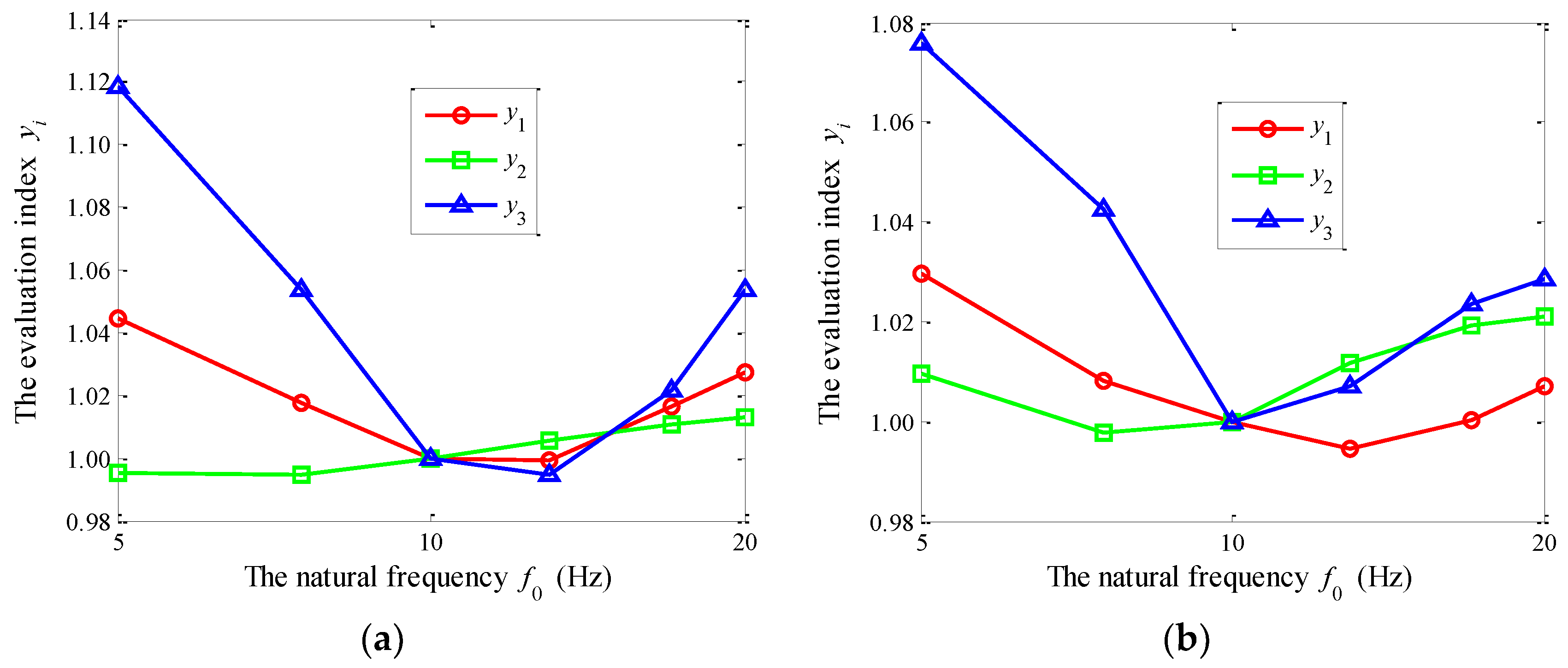
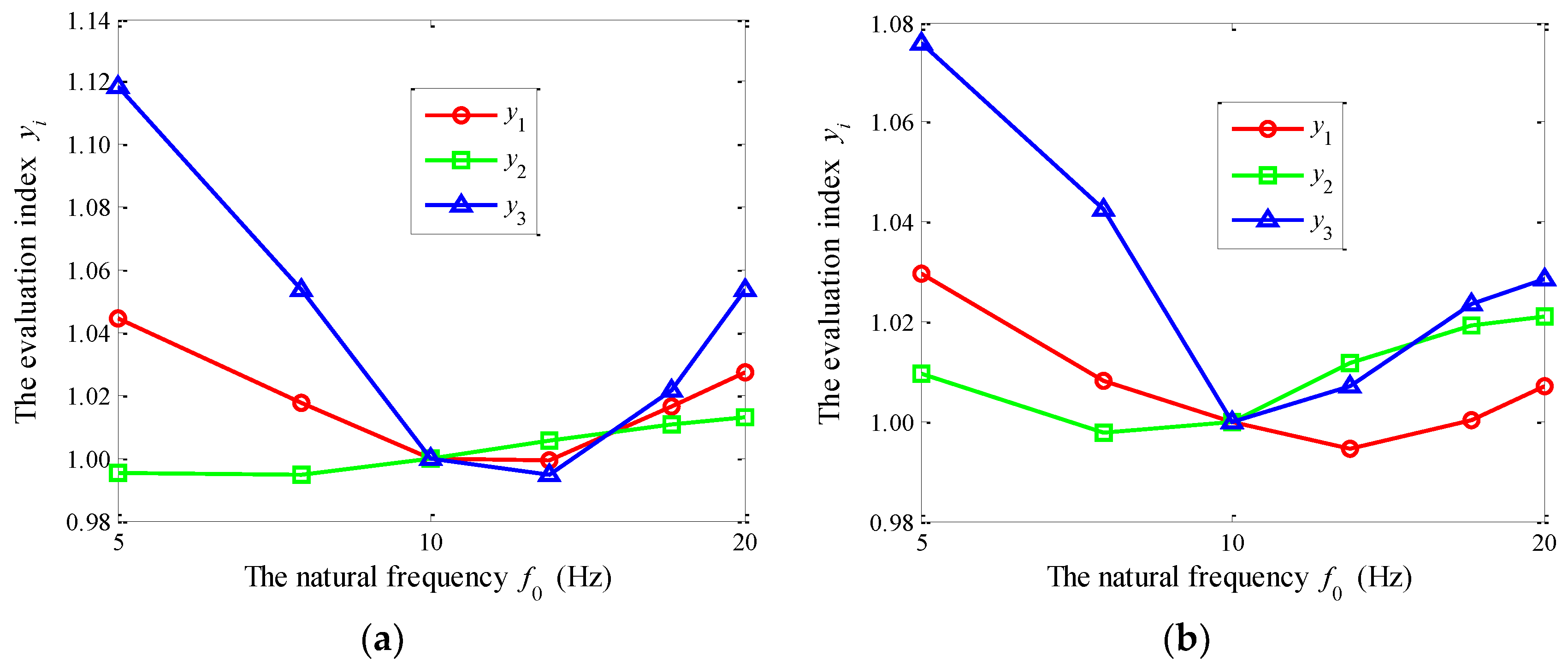
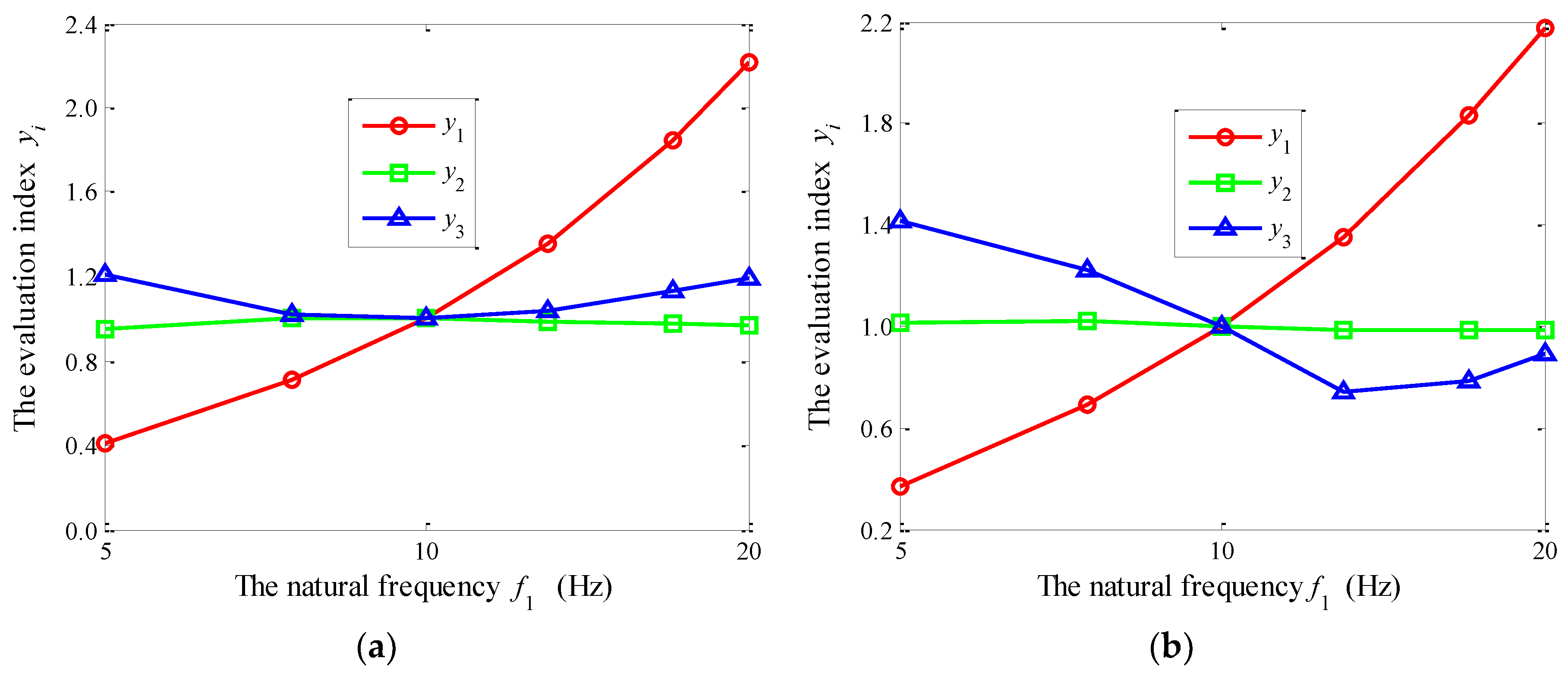
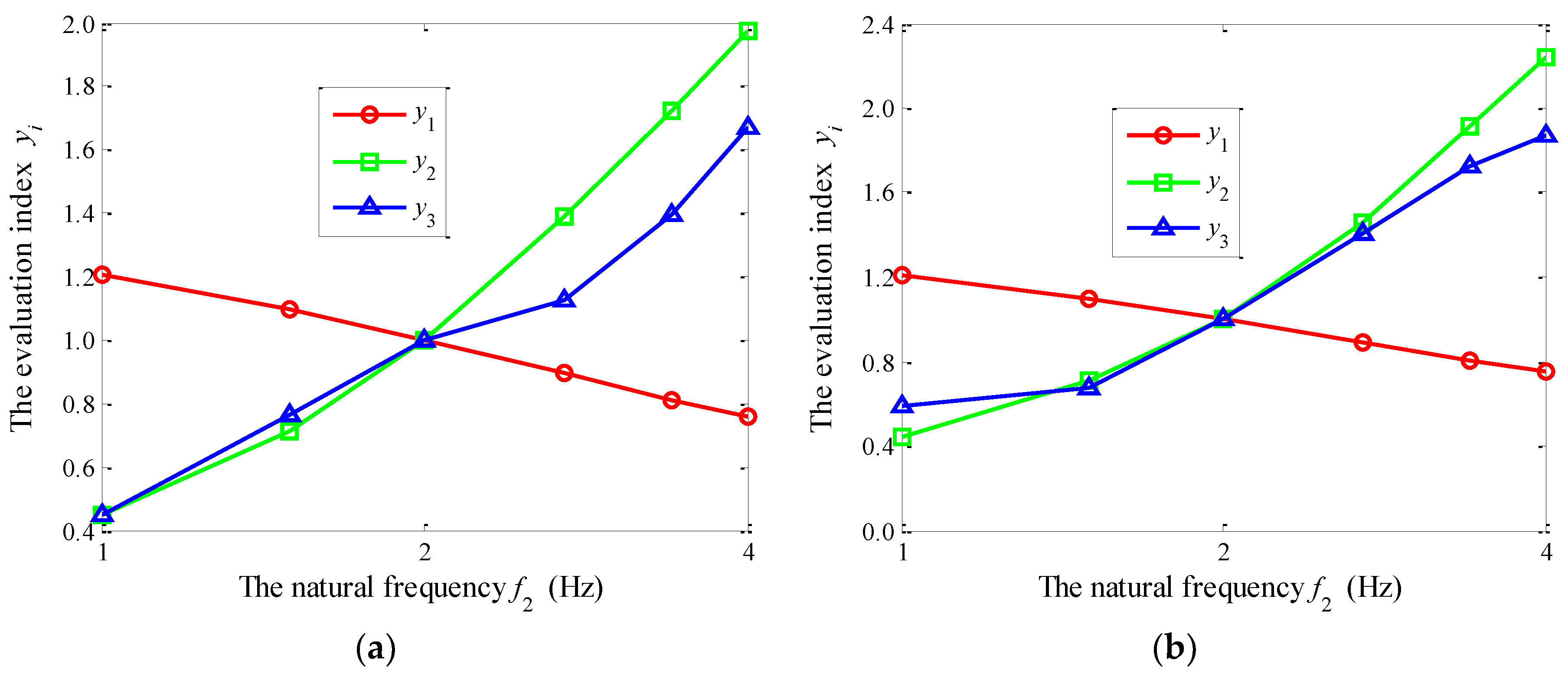
8.3. Influences of the Natural Frequencies f0, f1, and f2
8.4. Sensitivity Calculation of the Vibration Responses
9. Conclusions
- (1)
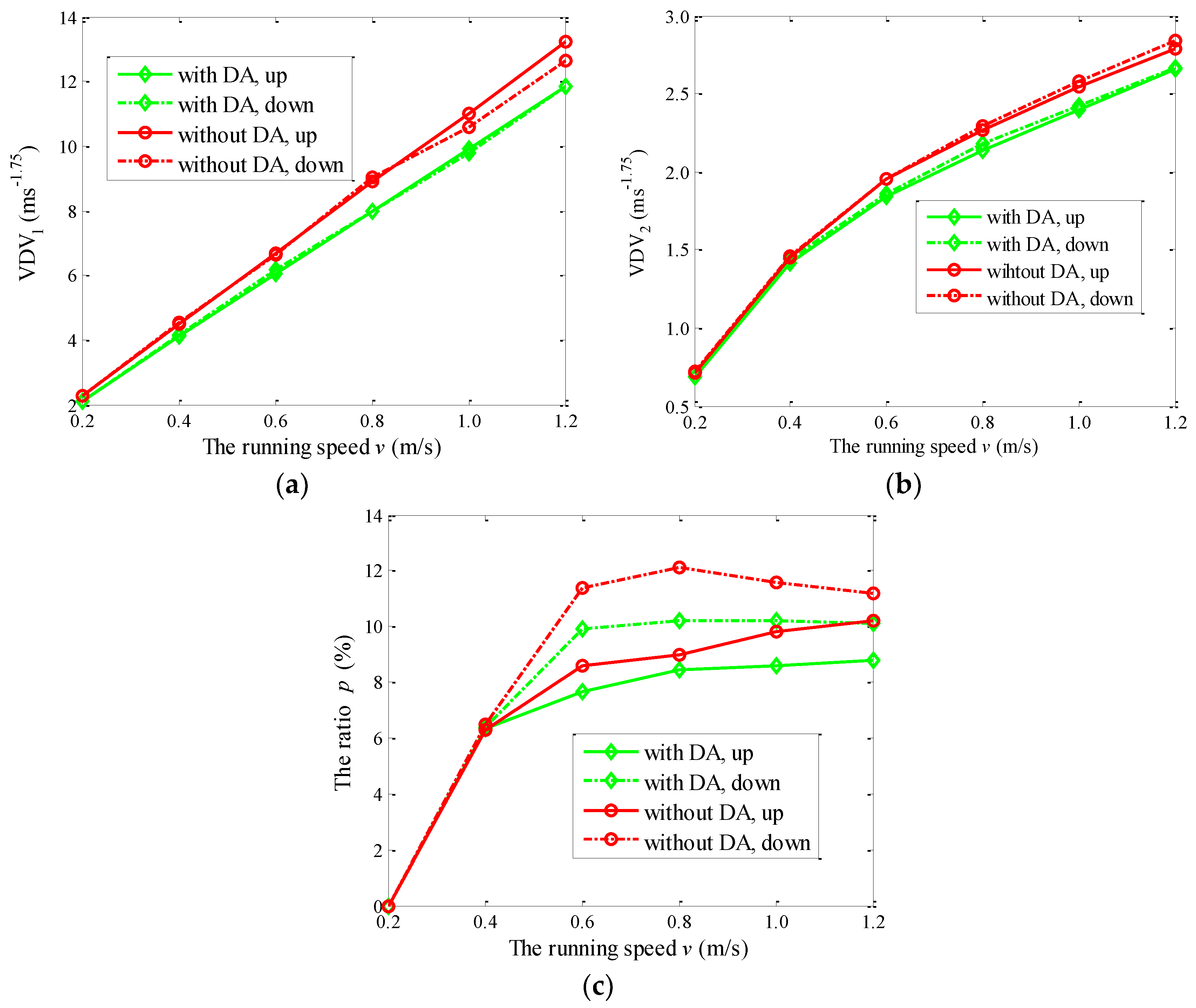
- The three evaluation indexes are all improved by using the DA. When the wheelchair goes up the step and goes down the step, the differences for VDV1 and VDV2 are relatively smaller, but the differences for p are relatively larger.
- (2)
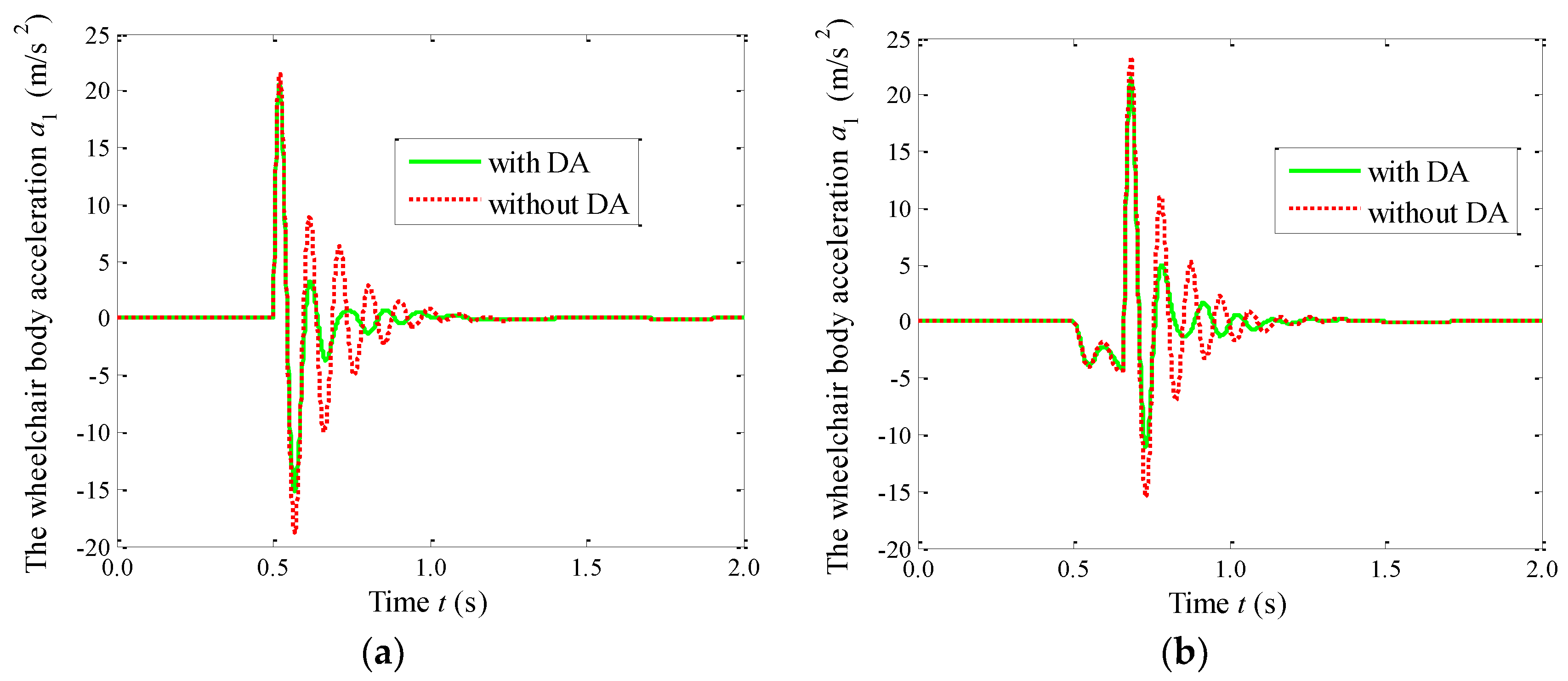
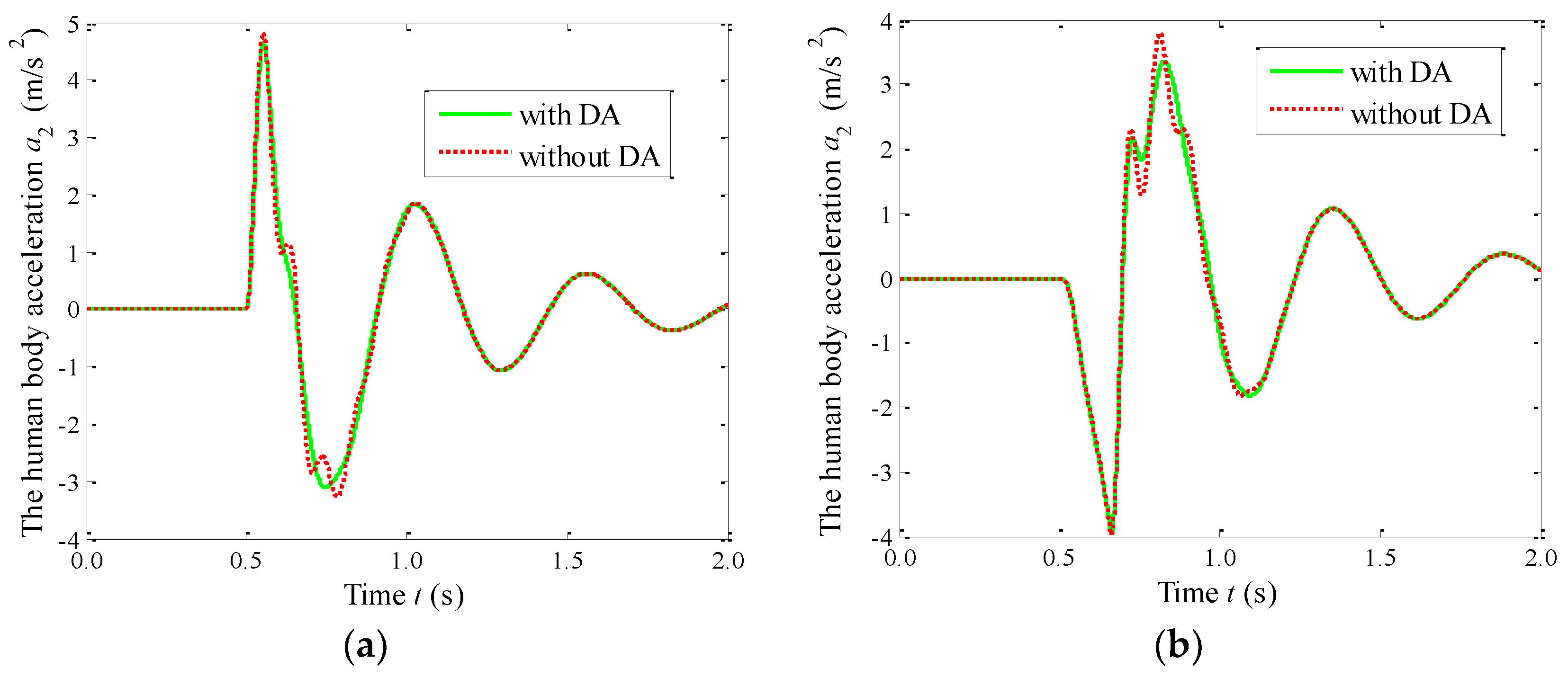
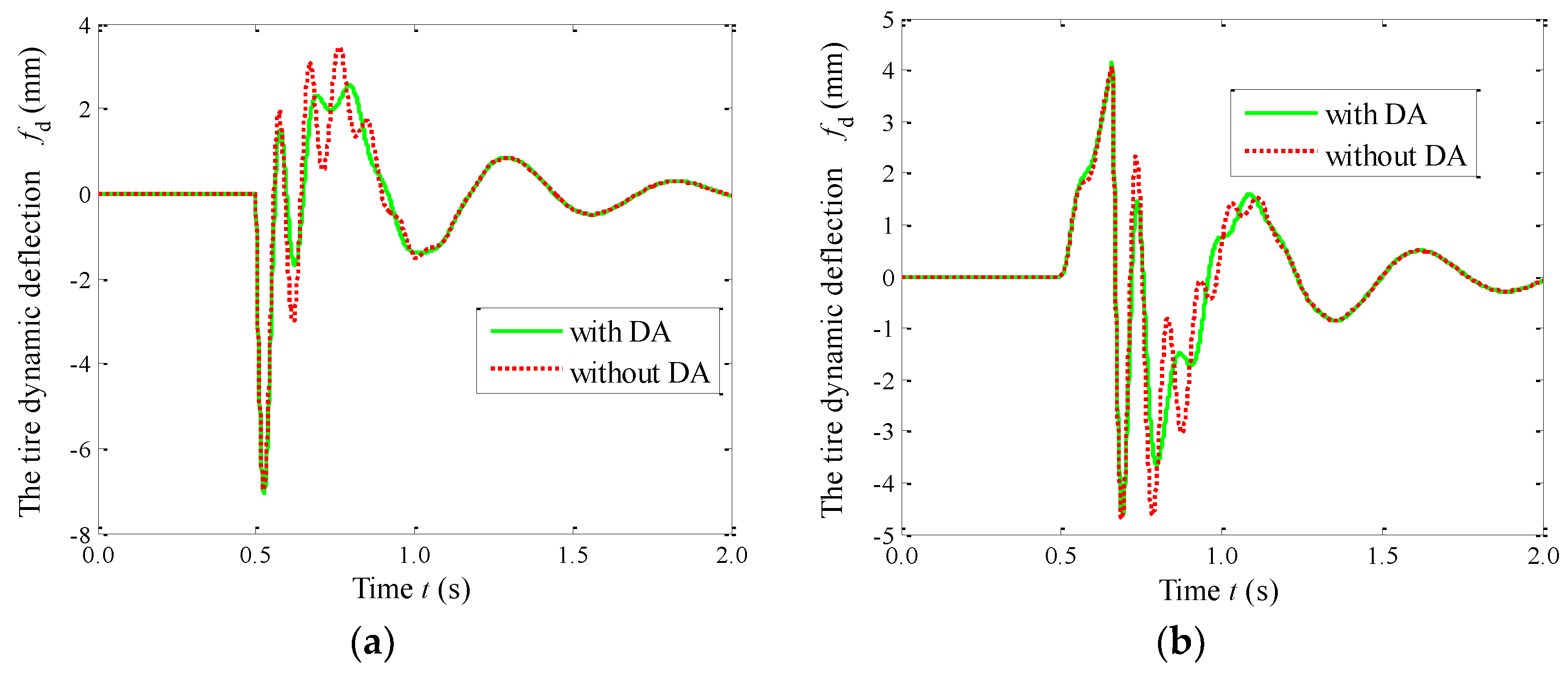
- The DA can significantly reduce the amplitudes of |H1|, |H2|, and |H3| in the resonant region of the wheelchair body. Moreover, the DA does not lead to the vibration deterioration in the resonant region of the human body. The DA has the favorable effect of reducing the tire dynamic deflection and attenuating the vibration of the human body and the wheelchair body.
- (3)
- With the increase of the tire static radius r, the vibration responses VDV1, VDV2, and p decrease. Thus, increasing r contributes to the attenuation of the pavement impact. The sensitivity values of the vibration responses to the characteristic parameters are not exactly the same for the wheelchair going up the step and going down the step. In both cases, VDV1 is the most sensitive to f1, and VDV2 is the most sensitive to f2. Meanwhile, p is very sensitive to both ξ2 and f2.
Author Contributions
Funding
Conflicts of Interest
References
- Kim, K.T.; Suk, H.I.; Lee, S.W. Commanding a brain-controlled wheelchair using steady-state somatosensory evoked potentials. IEEE Trans. Neural Syst. Rehabil. Eng. 2018, 26, 654–665. [Google Scholar] [CrossRef] [PubMed]
- Gong, D.X.; He, R.; Zuo, G.Y.; Yu, J.Y. Motion mapping in the joint space for the control of the heterogeneous wheelchair-mounted robotic arm. Acta Electron. Sin. 2018, 46, 464–472. [Google Scholar]
- Nguyen, V.T.; Jayawardena, C.; Ardekani, I. A navigation model for side-by-side robotic wheelchairs for optimizing social comfort in crossing situations. Robot. Auton. Syst. 2018, 100, 27–40. [Google Scholar] [CrossRef]
- Travlos, V.; Patman, S.; Wilson, A. Quality of life and psychosocial well-being in youth with neuromuscular disorders who are wheelchair users: A systematic review. Arch. Phys. Med. Rehabil. 2016, 98, 1004–1017. [Google Scholar] [CrossRef] [PubMed]
- Wu, B.F.; Chen, P.Y.; Lin, C.H. A New criterion of human comfort assessment for wheelchair robots by Q-Learning based accompanist tracking fuzzy controller. Int. J. Fuzzy Syst. 2016, 18, 1039–1053. [Google Scholar] [CrossRef]
- Routhier, F.; Lettre, J.; Miller, W.C.; Borisoff, J.F.; Keetch, K. Data logger technologies for manual wheelchairs: A scoping review. Assist. Technol. 2018, 30, 51–58. [Google Scholar] [CrossRef] [PubMed]
- Rojas, M.; Ponce, P.; Molina, A. A fuzzy logic navigation controller implemented in hardware for an electric wheelchair. Int. J. Adv. Robot. Syst. 2018, 15. [Google Scholar] [CrossRef] [Green Version]
- Pushp, S.; Saikia, A.; Khan, A.; Hazarika, S.M. A cognitively enhanced collaborative control architecture for an intelligent wheelchair: Formalization, implementation and evaluation. Cogn. Syst. Res. 2018, 49, 114–127. [Google Scholar] [CrossRef]
- Ma, K.; Qi, T.Z. A human-centered design of electric wheelchair controller with dual control access for both drivers of disabled people and caregiver. J. Comput. Inf. Sci. Eng. 2017, 17. [Google Scholar] [CrossRef]
- Arnay, R.; Hernández-Aceituno, J.; Toledo, J.; Acosta, L. Laser and Optical Flow Fusion for a Non-Intrusive Obstacle Detection System on an Intelligent Wheelchair. IEEE Sens. J. 2018, 18, 3799–3805. [Google Scholar] [CrossRef]
- Ktistakis, I.P.; Bourbakis, N.G. Assistive intelligent robotic wheelchairs. IEEE Potentials 2017, 36, 10–13. [Google Scholar] [CrossRef]
- Frank, A.O.; De Souza, L.H. Clinical features of children and adults with a muscular dystrophy using powered indoor/outdoor wheelchairs: Disease features, comorbidities and complications of disability. Disabil. Rehabil. 2018, 40, 1007–1013. [Google Scholar] [CrossRef] [PubMed]
- Kundu, A.S.; Lenka, P.K.; Lenka, P.K.; Bhaumik, S. Design and performance evaluation of 4 wheeled omni wheelchair with reduced slip and vibration. Procedia Comput. Sci. 2017, 105, 289–295. [Google Scholar] [CrossRef]
- Garcia-Mendenz, Y.; Pearlman, J.L.; Boninger, M.L.; Cooper, R.A. Health risks of vibration exposure to wheelchair users in the community. J. Spinal Cord Med. 2013, 36, 365–375. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Requejo, P.S.; Maneekobkunwong, S.; McNitt-Gray, J. Influence of hand-rim wheelchairs with rear suspension on seat forces and head accelerations during curb descent landings. J. Rehabil. Med. 2009, 41, 459–466. [Google Scholar] [CrossRef] [PubMed]
- BSI. BS EN 12183:2009 Manual Wheelchairs-Requirements and Test Methods; BSI: London, UK, 2009. [Google Scholar]
- RESNA. ANSI/RESNA WC-1:2009 Requirements and Test Methods for Wheelchairs (Including Scooters); RESNA: Washington, WA, USA, 2009. [Google Scholar]
- Standardization Administration of China. GB/T 13800-2009 Manual Wheelchairs; Standardization Administration of China: Beijing, China, 2009.
- Silva, L.C.; Dedini, F.G.; Corrêa, F.C.; Eckert, J.J.; Becker, M. Measurement of wheelchair contact force with a low cost bench test. Med. Eng. Phys. 2015, 38, 163–170. [Google Scholar] [CrossRef] [PubMed]
- Hillman, S.J.; Hollington, J.; Crossan, N. Correlation of ISO 16840-2:2007 impact damping and hysteresis measures for a sample of wheelchair seating cushions. Assist. Technol. 2018, 30, 77–83. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.Y.; Sun, C.Y.; Wang, B.G. Preliminary study on comfortableness of motorized wheelchair cushion. J. Biomed. Eng. 2016, 33, 320–324. [Google Scholar]
- Brienza, D.; Vallely, J.; Karg, P.; Akins, J.; Gefen, A. An MRI investigation of the effects of user anatomy and wheelchair cushion type on tissue deformation. J. Tissue Viab. 2018, 27, 42–53. [Google Scholar] [CrossRef] [PubMed]
- Brown, K.; Flashner, H.; Mcnittgray, J.L. Modeling wheelchair-users undergoing vibrations. J. Biomech. Eng. 2017, 139. [Google Scholar] [CrossRef] [PubMed]
- Leary, M.; Gruijters, J.; Mazur, M.; Subic, A.; Burton, M. A fundamental model of quasi-static wheelchair biomechanics. Med. Eng. Phys. 2012, 34, 1278–1286. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.Q.; Chase, J.G.; Wolm, P. System Identification and modelling of front wheel drive electric wheelchairs. In Proceedings of the 17th World Congress the International Federation of Automatic Control, Seoul, Korea, 6–11 July 2008. [Google Scholar]
- Salipur, Z.; Bertocci, G. Development and validation of rear impact computer simulation model of an adult manual transit wheelchair with a seated occupant. Med. Eng. Phys. 2010, 32, 66–75. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ceravolo, E.; Gabellone, M.; Farina, M.; Bascetta, L.; Matteucci, M. Model Predictive Control of an autonomous wheelchair. IFAC PapersOnLine 2017, 50, 9821–9826. [Google Scholar] [CrossRef]
- Dziechciowski, Z.; Kromkaszydek, M. Vibration transmitted to the human body during the patient’s ride in a wheelchair. Arch. Acoust. 2017, 42, 137–148. [Google Scholar] [CrossRef]
- Hikmawan, M.F.; Nugraha, A.S. Analysis of electric wheelchair passenger comfort with a half car model approach. In Proceedings of the 2016 International Conference on Sustainable Energy Engineering and Application: Sustainable Energy for a Better Life, Jakarta, Indonesia, 3–5 October 2016. [Google Scholar]
- Miyawaki, K.; Takahashi, D. Investigation of whole-body vibration of passenger sitting on wheelchair and of passenger sitting on wheelchair loaded on lifter. In Proceedings of the 2016 International Symposium on Micro-NanoMechatronics and Human Science, Nagoya, Japan, 28–30 November 2016. [Google Scholar]
- Su, K.H.; Chang, T.H.; Su, S.F. Design of fuzzy-based magnetic suspension vibrator for electric wheelchair. In Proceedings of the IEEE 12th International Conference on Networking, Sensing and Control, Taipei, Taiwan, 9–11 April 2015. [Google Scholar]
- Ababou, A.; Ababou, N.; Morsi, T.; Boukhechem, L. Test bench for analysis of harmful vibrations induced to wheelchair users. In Proceedings of the Part of 7th International Joint Conference on Biomedical Engineering Systems and Technologies, Angers, France, 3–6 March 2014. [Google Scholar]
- Hischke, M.; Raoul, I.I. Effect of rear wheel suspension on tilt-in-space wheelchair shock and vibration attenuation. PM R 2018. [Google Scholar] [CrossRef] [PubMed]
- Egidio, A.D.; Leo, A.M.D.; Simoneschi, G. Effectiveness of mass–damper dynamic absorber on rocking block under one-sine pulse ground motion. Int. J. Non-Linear Mech. 2018, 98, 154–162. [Google Scholar]
- Orečný, M.; Štefan, S.; Huňady, R.; Želmíra, F. Application of a magneto-rheological damper and a dynamic absorber for a suspension of a working machine seat. Procedia Eng. 2014, 96, 338–344. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| m2 (kg) | 75 | K2 (N/mm) | 11.84 |
| m1 (kg) | 25 | K1 (N/mm) | 98.70 |
| C2 (Ns/m) | 377 | r (mm) | 250 |
| Running Speed v (m/s) | The Tested VDV2 (ms−1.75) | The Simulated VDV2 (ms−1.75) | The Relative Deviation (%) |
|---|---|---|---|
| 0.2 | 0.70 | 0.74 | 5.7 |
| 0.4 | 1.48 | 1.42 | 5.1 |
| 0.6 | 1.90 | 1.97 | 3.7 |
| 0.8 | 2.25 | 2.36 | 4.9 |
| Running Speed v (m/s) | The Tested VDV2 (ms−1.75) | The Simulated VDV2 (ms−1.75) | The Relative Deviation (%) |
|---|---|---|---|
| 0.2 | 0.71 | 0.69 | 2.8 |
| 0.4 | 1.45 | 1.40 | 3.4 |
| 0.6 | 1.76 | 1.67 | 4.0 |
| 0.8 | 2.10 | 1.92 | 8.6 |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| m2 (kg) | 75 | K2 (N/mm) | 11.84 |
| m1 (kg) | 25 | K1 (N/mm) | 98.70 |
| m0 (kg) | 2.5 | K0 (N/mm) | 9.87 |
| C2 (Ns/m) | 377 | r (mm) | 250 |
| C0 (Ns/m) | 78 |
| r (mm) | VDV1 (ms−1.75) | VDV2 (ms−1.75) | p (%) | |||
|---|---|---|---|---|---|---|
| Up | Down | Up | Down | Up | Down | |
| 200 | 5.56 | 5.66 | 1.86 | 1.71 | 7.48 | 7.68 |
| 250 | 4.87 | 4.94 | 1.70 | 1.58 | 7.46 | 5.64 |
| 300 | 4.39 | 4.46 | 1.57 | 1.49 | 7.35 | 5.62 |
| Characteristic Parameter | Baseline | +100% | −50% |
|---|---|---|---|
| r2 | 3.0 | 6.0 | 1.5 |
| r0 | 0.10 | 0.05 | 0.20 |
| ξ2 | 0.25 | 0.5 | 0.125 |
| ξ0 | 0.25 | 0.5 | 0.125 |
| f2 | 2.0 | 4.0 | 1.0 |
| f1 | 10.0 | 20.0 | 5.0 |
| f0 | 10.0 | 20.0 | 5.0 |
| System Parameter | Sp | |||||
|---|---|---|---|---|---|---|
| Up | Down | Up | Down | Up | Down | |
| r0 | 0.258 | 0.281 | 0.001 | 0.091 | 0.191 | 0.345 |
| r2 | 0.521 | 0.532 | 0.305 | 0.232 | 0.500 | 0.606 |
| ξ0 | 0.090 | 0.065 | 0.050 | 0.078 | 0.230 | 0.178 |
| ξ2 | 0.454 | 0.440 | 0.354 | 0.457 | 0.907 | 0.780 |
| f0 | 0.227 | 0.187 | 0.112 | 0.155 | 0.365 | 0.277 |
| f1 | 1.095 | 1.101 | 0.256 | 0.183 | 0.531 | 0.773 |
| f2 | 0.556 | 0.561 | 1.011 | 1.087 | 0.922 | 0.914 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, S.; Zhao, L.; Hu, Y.; Yang, F. Impact Responses and Parameters Sensitivity Analysis of Electric Wheelchairs. Electronics 2018, 7, 87. https://doi.org/10.3390/electronics7060087
Wang S, Zhao L, Hu Y, Yang F. Impact Responses and Parameters Sensitivity Analysis of Electric Wheelchairs. Electronics. 2018; 7(6):87. https://doi.org/10.3390/electronics7060087
Chicago/Turabian StyleWang, Song, Leilei Zhao, Yanzhu Hu, and Fuxing Yang. 2018. "Impact Responses and Parameters Sensitivity Analysis of Electric Wheelchairs" Electronics 7, no. 6: 87. https://doi.org/10.3390/electronics7060087
APA StyleWang, S., Zhao, L., Hu, Y., & Yang, F. (2018). Impact Responses and Parameters Sensitivity Analysis of Electric Wheelchairs. Electronics, 7(6), 87. https://doi.org/10.3390/electronics7060087