

Fuel Cell Voltage Regulation Using Dynamic Integral Sliding Mode Control
 , , , ,
, , , ,  , ,
, ,
Abstract
:1. Introduction
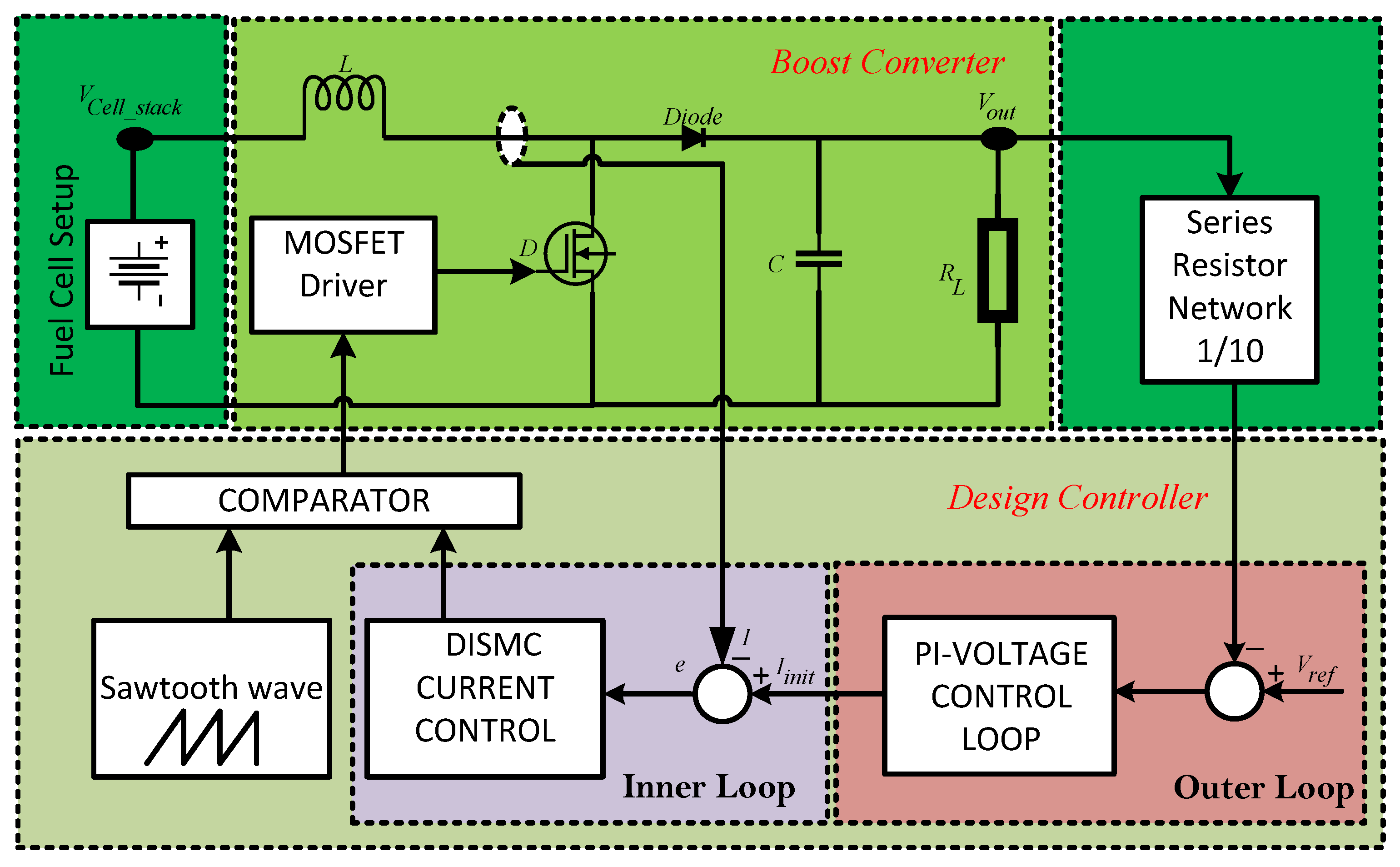
2. System Description
3. Mathematical Model
3.1. PEMFC Stack Voltage
3.2. Power Converter
3.3. Hybrid Model
3.4. Lyapunov Based Existence Condition
4. Hardware Setup
5. Results and Discussion
5.1. Steady-State Error and Transient Response
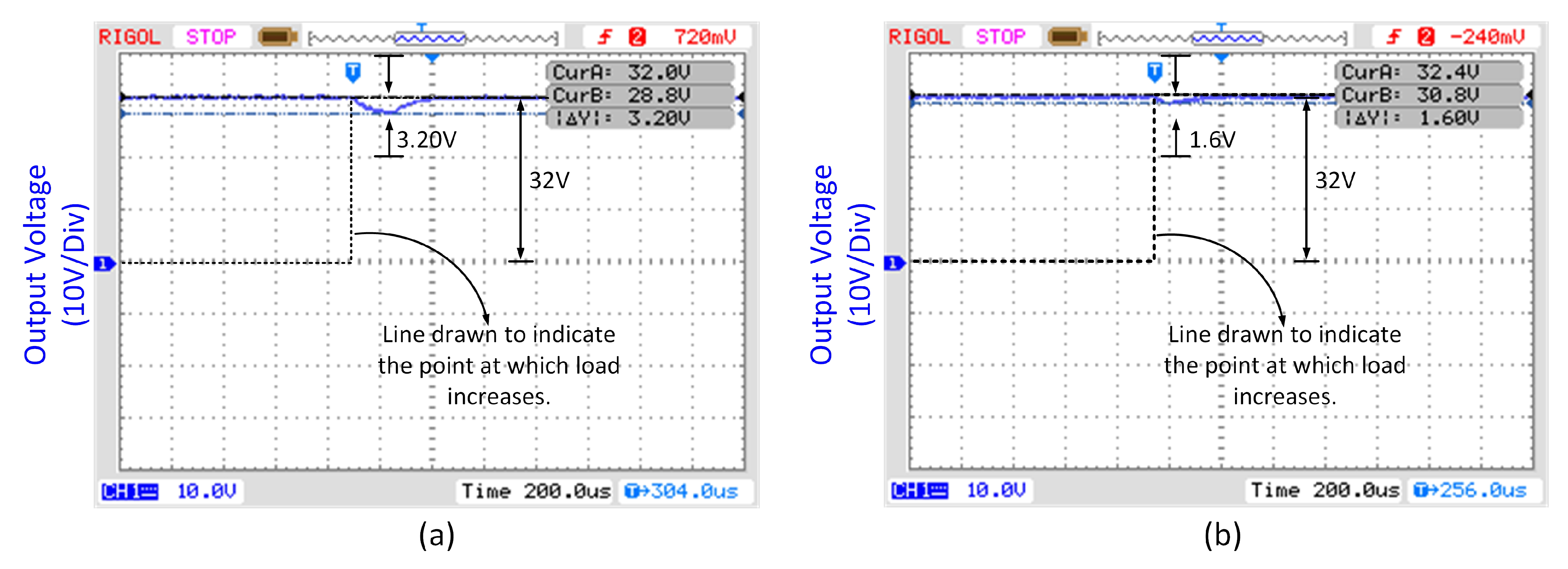
5.2. Robustness to Load Variations
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sharma, A.; Khan, R.A.; Sharma, A.; Kashyap, D.; Rajput, S. A Novel Opposition-Based Arithmetic Optimization Algorithm for Parameter Extraction of PEM Fuel Cell. Electronics 2021, 10, 2834. [Google Scholar] [CrossRef]
- Chen, W.M.; Kim, H. Energy, economic, and social impacts of a clean energy economic policy: Fuel cells deployment in Delaware. Energy Policy 2020, 144, 111617. [Google Scholar] [CrossRef]
- Xing, L.; Bai, X.; Gao, Y.; Cao, Z. Improving clean electrical power generation: A theoretical modelling analysis of a molten sodium hydroxide direct carbon fuel cell with low pollution. J. Clean. Prod. 2021, 281, 124623. [Google Scholar] [CrossRef]
- Godula-Jopek, D.I.h.A.; Westenberger, A.F. Fuel Cell Types: PEMFC/DMFC/AFC/PAFC//MCFC/SOFC/. In Encyclopedia of Energy Storage; Cabeza, L.F., Ed.; Elsevier: Oxford, UK, 2022; pp. 250–265. [Google Scholar] [CrossRef]
- Hosseini, S.E. 4.12-Hydrogen and Fuel Cells in Transport Road, Rail, Air, and Sea. In Comprehensive Renewable Energy, 2nd ed.; Letcher, T.M., Ed.; Elsevier: Oxford, UK, 2022; pp. 317–342. [Google Scholar] [CrossRef]
- Yang, B.; Li, J.; Li, Y.; Guo, Z.; Zeng, K.; Shu, H.; Cao, P.; Ren, Y. A critical survey of proton exchange membrane fuel cell system control: Summaries, advances, and perspectives. Int. J. Hydrogren Energy 2022, 47, 9986–10020. [Google Scholar] [CrossRef]
- Lin-Kwong-Chon, C.; Grondin-Pérez, B.; Kadjo, J.J.A.; Damour, C.; Benne, M. A review of adaptive neural control applied to proton exchange membrane fuel cell systems. Annu. Rev. Control 2019, 47, 133–154. [Google Scholar] [CrossRef]
- Yuan, H.; Dai, H.; Wei, X.; Ming, P. Model-based observers for internal states estimation and control of proton exchange membrane fuel cell system: A review. J. Power Sources 2020, 468, 228376. [Google Scholar] [CrossRef]
- Yuan, X.Z.; Nayoze-Coynel, C.; Shaigan, N.; Fisher, D.; Zhao, N.; Zamel, N.; Gazdzicki, P.; Ulsh, M.; Friedrich, K.A.; Girard, F.; et al. A review of functions, attributes, properties and measurements for the quality control of proton exchange membrane fuel cell components. J. Power Sources 2021, 491, 229540. [Google Scholar] [CrossRef]
- Hou, J.; Yang, M.; Ke, C.; Zhang, J. Control logics and strategies for air supply in PEM fuel cell engines. Appl. Energy 2020, 269, 115059. [Google Scholar] [CrossRef]
- Oliveira, T.R.; Krstić, M.; Tsubakino, D. Extremum Seeking for Static Maps With Delays. IEEE Trans. Autom. Control 2017, 62, 1911–1926. [Google Scholar] [CrossRef]
- He, H.; Quan, S.; Sun, F.; Wang, Y.X. Model Predictive Control With Lifetime Constraints Based Energy Management Strategy for Proton Exchange Membrane Fuel Cell Hybrid Power Systems. IEEE Trans. Ind. Electron. 2020, 67, 9012–9023. [Google Scholar] [CrossRef]
- Chatrattanawet, N.; Hakhen, T.; Kheawhom, S.; Arpornwichanop, A. Control structure design and robust model predictive control for controlling a proton exchange membrane fuel cell. J. Clean. Prod. 2017, 148, 934–947. [Google Scholar] [CrossRef]
- Chen, Q.; Gao, L.; Dougal, R.A.; Quan, S. Multiple model predictive control for a hybrid proton exchange membrane fuel cell system. J. Power Sources 2009, 191, 473–482. [Google Scholar] [CrossRef]
- Li, G.; Fu, H.; Madonski, R.; Czeczot, J.; Nowak, P.; Lakomy, K.; Sun, L. Feed-forward offset-free model predictive temperature control for proton exchange membrane fuel cell: An experimental study. ISA Trans. 2021; in press. [Google Scholar] [CrossRef]
- Ekaputri, C.; Syaichu-Rohman, A. Model predictive control (MPC) design and implementation using algorithm-3 on board SPARTAN 6 FPGA SP605 evaluation kit. In Proceedings of the 2013 3rd International Conference on Instrumentation Control and Automation (ICA), Bali, Indonesia, 28–30 August 2013; pp. 115–120. [Google Scholar] [CrossRef]
- Liu, Z.; Chen, H.; Peng, L.; Ye, X.; Xu, S.; Zhang, T. Feedforward-decoupled closed-loop fuzzy proportion-integral-derivative control of air supply system of proton exchange membrane fuel cell. Energy 2022, 240, 122490. [Google Scholar] [CrossRef]
- Mahali, A.P.; Babu Gara, U.B.; Mullapudi, S. Fuzzy Logic based Control Strategies for Proton Exchange Membrane Fuel Cell System. IFAC-PapersOnLine 2022, 55, 703–708. [Google Scholar] [CrossRef]
- Chen, X.; Xu, J.; Fang, Y.; Li, W.; Ding, Y.; Wan, Z.; Wang, X.; Tu, Z. Temperature and humidity management of PEM fuel cell power system using multi-input and multi-output fuzzy method. Appl. Therm. Eng. 2022, 203, 117865. [Google Scholar] [CrossRef]
- AbouOmar, M.S.; Su, Y.; Zhang, H.; Shi, B.; Wan, L. Observer-based interval type-2 fuzzy PID controller for PEMFC air feeding system using novel hybrid neural network algorithm-differential evolution optimizer. Alex. Eng. J. 2022, 61, 7353–7375. [Google Scholar] [CrossRef]
- Behrooz, F.; Mariun, N.; Marhaban, M.; Mohd Radzi, M.A.; Ramli, A. Review of Control Techniques for HVAC Systems—Nonlinearity Approaches Based on Fuzzy Cognitive Maps. Energies 2018, 11, 495. [Google Scholar] [CrossRef]
- Souissi, A. Adaptive sliding mode control of a PEM fuel cell system based on the super twisting algorithm. Energy Rep. 2021, 7, 3390–3399. [Google Scholar] [CrossRef]
- Derbeli, M.; Barambones, O.; Farhat, M.; Ramos-Hernanz, J.A.; Sbita, L. Robust high order sliding mode control for performance improvement of PEM fuel cell power systems. Int. J. Hydrogen Energy 2020, 45, 29222–29234. [Google Scholar] [CrossRef]
- Javaid, U.; Mehmood, A.; Arshad, A.; Imtiaz, F.; Iqbal, J. Operational Efficiency Improvement of PEM Fuel Cell—A Sliding Mode Based Modern Control Approach. IEEE Access 2020, 8, 95823–95831. [Google Scholar] [CrossRef]
- Javaid, U.; Iqbal, J.; Mehmood, A.; Uppal, A.A. Performance improvement in polymer electrolytic membrane fuel cell based on nonlinear control strategies—A comprehensive study. PLoS ONE 2022, 17, e0264205. [Google Scholar] [CrossRef] [PubMed]
- Choe, S.Y.; Lee, J.G.; Ahn, J.W.; Baek, S.H. Integrated modeling and control of a PEM fuel cell power system with a PWM DC/DC converter. J. Power Sources 2007, 164, 614–623. [Google Scholar] [CrossRef]
- Chen, K.; Hou, Y.; Jiang, C.; Pan, X.; Hao, D. Experimental investigation on statistical characteristics of cell voltage distribution for a PEMFC stack under dynamic driving cycle. Int. J. Hydrogen Energy 2021, 46, 38469–38481. [Google Scholar] [CrossRef]
- Chen, X.; Fang, Y.; Liu, Q.; He, L.; Zhao, Y.; Huang, T.; Wan, Z.; Wang, X. Temperature and voltage dynamic control of PEMFC Stack using MPC method. Energy Rep. 2022, 8, 798–808. [Google Scholar] [CrossRef]
- Cao, Y.; Li, Y.; Zhang, G.; Jermsittiparsert, K.; Nasseri, M. An efficient terminal voltage control for PEMFC based on an improved version of whale optimization algorithm. Energy Rep. 2020, 6, 530–542. [Google Scholar] [CrossRef]
- Roux Oliveira, T.; Revoredo, T. Monitoring Function based Extremum Seeking for Fuel Cell Energy Applications. In Proceedings of the International Congress of Mechanical Engineering (COBEM), Rio de Janeiro, Brazil, 6–11 December 2015. [Google Scholar]
- Awais, M.; Yasin, A.R.; Riaz, M.; Saqib, B.; Zia, S.; Yasin, A. Robust Sliding Mode Control of a Unipolar Power Inverter. Energies 2021, 14, 5405. [Google Scholar] [CrossRef]
- Sankar, K.; Saravanakumar, G.; Jana, A.K. Nonlinear multivariable control of an integrated PEM fuel cell system with a DC-DC boost converter. Chem. Eng. Res. Des. 2021, 167, 141–156. [Google Scholar] [CrossRef]
- Kuo, J.K.; Wang, C.F. An integrated simulation model for PEM fuel cell power systems with a buck DC–DC converter. Int. J. Hydrogen Energy 2011, 36, 11846–11855. [Google Scholar] [CrossRef]
- Sabanovic, A. Buck converter regulator operating in the sliding mode. In Proceedings of the PCI, Orlando, FL, USA, 19–21 April 1983. [Google Scholar]
- Venkataramanan, R. Sliding Mode Control of Power Converters; California Institute of Technology: Pasadena, CA, USA, 1986. [Google Scholar]
- Carpita, M.; Marchesoni, M. Experimental study of a power conditioning system using sliding mode control. IEEE Trans. Power Electron. 1996, 11, 731–742. [Google Scholar] [CrossRef]
- Hizarci, H.; Pekperlak, U.; Arifoglu, U. Conducted emission suppression using an EMI filter for grid-tied three-phase/level T-type solar inverter. IEEE Access 2021, 9, 67417–67431. [Google Scholar] [CrossRef]
- Qi, W.; Li, S.; Tan, S.C.; Hui, S.R. Parabolic-modulated sliding-mode voltage control of a buck converter. IEEE Trans. Ind. Electron. 2017, 65, 844–854. [Google Scholar] [CrossRef]
- Repecho, V.; Biel, D.; Ramos-Lara, R.; Vega, P.G. Fixed-switching frequency interleaved sliding mode eight-phase synchronous buck converter. IEEE Trans. Power Electron. 2017, 33, 676–688. [Google Scholar] [CrossRef]
- Al-Wesabi, I.; Fang, Z.; Wei, Z.; Dong, H. Direct sliding mode control for dynamic instabilities in DC-link voltage of standalone photovoltaic systems with a small capacitor. Electronics 2022, 11, 133. [Google Scholar] [CrossRef]
- Yao, S.; Gao, G.; Gao, Z. On multi-axis motion synchronization: The cascade control structure and integrated smc–adrc design. ISA Trans. 2021, 109, 259–268. [Google Scholar] [CrossRef]
- Yasin, A.R.; Ashraf, M.; Bhatti, A.I. A Novel Filter Extracted Equivalent Control Based Fixed Frequency Sliding Mode Approach for Power Electronic Converters. Energies 2019, 12, 853. [Google Scholar] [CrossRef]
- Gao, M.; Wang, D.; Li, Y.; Yuan, T. Fixed frequency pulse-width modulation based integrated sliding mode controller for phase-shifted full-bridge converters. IEEE Access 2017, 6, 2181–2192. [Google Scholar] [CrossRef]
- Repecho, V.; Biel, D.; Arias, A. Fixed switching period discrete-time sliding mode current control of a PMSM. IEEE Trans. Ind. Electron. 2017, 65, 2039–2048. [Google Scholar] [CrossRef]
- Chincholkar, S.H.; Jiang, W.; Chan, C.Y. An improved PWM-based sliding-mode controller for a DC–DC cascade boost converter. IEEE Trans. Circuits Syst. II Express Briefs 2017, 65, 1639–1643. [Google Scholar] [CrossRef]
- Li, J.; Liu, Z.; Su, Q. Improved adaptive backstepping sliding mode control for a three-phase PWM AC–DC converter. IET Control Theory Appl. 2019, 13, 854–860. [Google Scholar] [CrossRef]
- Repecho, V.; Biel, D.; Olm, J.M.; Colet, E.F. Switching frequency regulation in sliding mode control by a hysteresis band controller. IEEE Trans. Power Electron. 2016, 32, 1557–1569. [Google Scholar] [CrossRef]
- Ortiz-Castrillón, J.R.; Mejía-Ruiz, G.E.; Muñoz-Galeano, N.; López-Lezama, J.M.; Cano-Quintero, J.B. A sliding surface for controlling a semi-bridgeless boost converter with power factor correction and adaptive hysteresis band. Appl. Sci. 2021, 11, 1873. [Google Scholar] [CrossRef]
- Hoyos, F.E.; Candelo-Becerra, J.E.; Hoyos Velasco, C.I. Application of zero average dynamics and fixed point induction control techniques to control the speed of a DC motor with a buck converter. Appl. Sci. 2020, 10, 1807. [Google Scholar] [CrossRef]
- Muñoz, J.G.; Angulo, F.; Angulo-Garcia, D. Zero average surface controlled boost-flyback converter. Energies 2020, 14, 57. [Google Scholar] [CrossRef]
- Yasin, A.R.; Ashraf, M.; Bhatti, A.I.; Uppal, A.A. Fixed frequency sliding mode control of renewable energy resources in DC micro grid. Asian J. Control 2019, 21, 2074–2086. [Google Scholar] [CrossRef]
- Yasin, A.R.; Ashraf, M.; Bhatti, A.I. Fixed frequency sliding mode control of power converters for improved dynamic response in DC micro-grids. Energies 2018, 11, 2799. [Google Scholar] [CrossRef]
- Li, Z.; Wang, X.; Kong, M.; Chen, X. Bidirectional harmonic current control of brushless doubly fed motor drive system based on a fractional unidirectional converter under a weak grid. IEEE Access 2021, 9, 19926–19938. [Google Scholar] [CrossRef]
- Tan, S.C.; Lai, Y.M.; Tse, C.K.; Cheung, M.K. A fixed-frequency pulsewidth modulation based quasi-sliding-mode controller for buck converters. IEEE Trans. Power Electron. 2005, 20, 1379–1392. [Google Scholar] [CrossRef]
- Khan, I.; Bhatti, A.I.; Arshad, A.; Khan, Q. Robustness and Performance Parameterization of Smooth Second Order Sliding Mode Control. Int. J. Control Autom. Syst. 2016, 14, 681–690. [Google Scholar] [CrossRef]
- Abrishamifar, A.; Ahmad, A.; Mohamadian, M. Fixed switching frequency sliding mode control for single-phase unipolar inverters. IEEE Trans. Power Electron. 2011, 27, 2507–2514. [Google Scholar] [CrossRef]
- Ye, J.; Malysz, P.; Emadi, A. A fixed-switching-frequency integral sliding mode current controller for switched reluctance motor drives. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 3, 381–394. [Google Scholar] [CrossRef]
- Huerta, S.C.; Alou, P.; Garcia, O.; Oliver, J.A.; Prieto, R.; Cobos, J. Hysteretic mixed-signal controller for high-frequency DC–DC converters operating at constant switching frequency. IEEE Trans. Power Electron. 2012, 27, 2690–2696. [Google Scholar] [CrossRef]
- Vidal-Idiarte, E.; Marcos-Pastor, A.; Garcia, G.; Cid-Pastor, A.; Martinez-Salamero, L. Discrete-time sliding-mode-based digital pulse width modulation control of a boost converter. IET Power Electron. 2015, 8, 708–714. [Google Scholar] [CrossRef]
- Yan, W.T.; Ho, C.N.M.; Chung, H.S.H.; Au, K.T. Fixed-frequency boundary control of buck converter with second-order switching surface. IEEE Trans. Power Electron. 2009, 24, 2193–2201. [Google Scholar] [CrossRef]
- Venkateswaran, R.; Yesudhas, A.A.; Lee, S.R.; Joo, Y.H. Integral sliding mode control for extracting stable output power and regulating DC-link voltage in PMVG-based wind turbine system. Int. J. Electr. Power Energy Syst. 2023, 144, 108482. [Google Scholar] [CrossRef]
- Armghan, H.; Yang, M.; Armghan, A.; Ali, N. Double integral action based sliding mode controller design for the back-to-back converters in grid-connected hybrid wind-PV system. Int. J. Electr. Power Energy Syst. 2021, 127, 106655. [Google Scholar] [CrossRef]
- Riaz, M.; Yasin, A.R.; Arshad Uppal, A.; Yasin, A. A novel dynamic integral sliding mode control for power electronic converters. Sci. Prog. 2021, 104, 00368504211044848. [Google Scholar] [CrossRef]
- Khan, Q.; Bhatti, A.I.; Iqbal, S.; Iqbal, M. Dynamic integral sliding mode for MIMO uncertain nonlinear systems. Int. J. Control Autom. Syst. 2011, 9, 151–160. [Google Scholar] [CrossRef]
- Omran, A.; Lucchesi, A.; Smith, D.; Alaswad, A.; Amiri, A.; Wilberforce, T.; Sodré, J.R.; Olabi, A.G. Mathematical model of a proton-exchange membrane (PEM) fuel cell. Int. J. Thermofluids 2021, 11, 100110. [Google Scholar] [CrossRef]
- Baschuk, J.J.; Li, X. A general formulation for a mathematical PEM fuel cell model. J. Power Sources 2005, 142, 134–153. [Google Scholar] [CrossRef]
- Xue, X.D.; Cheng, K.W.E.; Sutanto, D. Unified mathematical modelling of steady-state and dynamic voltage–current characteristics for PEM fuel cells. Electrochim. Acta 2006, 52, 1135–1144. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref # | Control Technique | Relative Cost | Convergence Speed | Parametric Independence | Complexity |
|---|---|---|---|---|---|
| [63] | Dynamic Integral SMC1 | Moderate | Fast | Independent | Low |
| [38,39] | Parabolic Modulated SMC | Low | Fast | Dependent | Moderate |
| [42] | Equivalent Control via Filter Extraction | Low | Real-time | Independent | Low |
| [62] | Double Integral SMC | Moderate | Fast | Independent | High |
| [45,51,52,53,54,56,57] | Fixed-Frequency via PWM2 | Low | Real-time | Dependent | Moderate |
| [43,61] | Fixed-Frequency Integral SMC | Low | Real-time | Dependent | Moderate |
| [60] | Fixed-Frequency Boundary Control | Low | Real-time | Independent | High |
| [58] | Fixed-Frequency Mixed-signal Hysteresis Control | High | Moderate | Independent | High |
| [44,59] | Discrete-Time SMC | High | Moderate | Independent | High |
| [55] | 2nd Order SMC | High | Moderate | Independent | Moderate |
| [49,50] | Zero Average Dynamics | High | Fast | Independent | High |
| [46] | Adaptive Backstepping SMC | High | Moderate | Independent | High |
| [34,35,47,48] | Hysteresis Band SMC * | Moderate | Real-time | Independent | Low |
| Parameter | Description |
|---|---|
| Type | Portable |
| Operating Temperature | 65 °C |
| Volume | 15 × 10.9 × 9.4 cm3 |
| Weight | 90 g |
| Oxident Supply | Open Cathode |
| Specification | Representation | Value |
|---|---|---|
| Input Voltage | Vcell_stack | 11–19 V |
| Output voltage | Vout | 32 V |
| Capacitance | C | 2200 µF |
| Coil inductance | L | 110 µH |
| Switching Frequency | F | 32 kHz |
| Load Resistor | Rinit | 82 Ω |
| Variation in Load | ΔR | 0–47 Ω |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yasin, A.; Yasin, A.R.; Saqib, M.B.; Zia, S.; Riaz, M.; Nazir, R.; Abdalla, R.A.E.; Bajwa, S. Fuel Cell Voltage Regulation Using Dynamic Integral Sliding Mode Control. Electronics 2022, 11, 2922. https://doi.org/10.3390/electronics11182922
Yasin A, Yasin AR, Saqib MB, Zia S, Riaz M, Nazir R, Abdalla RAE, Bajwa S. Fuel Cell Voltage Regulation Using Dynamic Integral Sliding Mode Control. Electronics. 2022; 11(18):2922. https://doi.org/10.3390/electronics11182922
Chicago/Turabian StyleYasin, Amina, Abdul Rehman Yasin, Muhammad Bilal Saqib, Saba Zia, Mudassar Riaz, Robina Nazir, Ridab Adlan Elamin Abdalla, and Shaherbano Bajwa. 2022. "Fuel Cell Voltage Regulation Using Dynamic Integral Sliding Mode Control" Electronics 11, no. 18: 2922. https://doi.org/10.3390/electronics11182922