The diagnostic method proposed in
Section 2 and
Section 3 was implemented in the MATLAB environment, and the calculations were performed on a PC with an Intel Core i7-6700 processor. To show the efficiency of the method, three numerical examples are presented. Whenever the iterative method described in
Section 3 is employed, the nominal values of the fault-free variables are chosen to form the initial guess.
4.1. Example 1
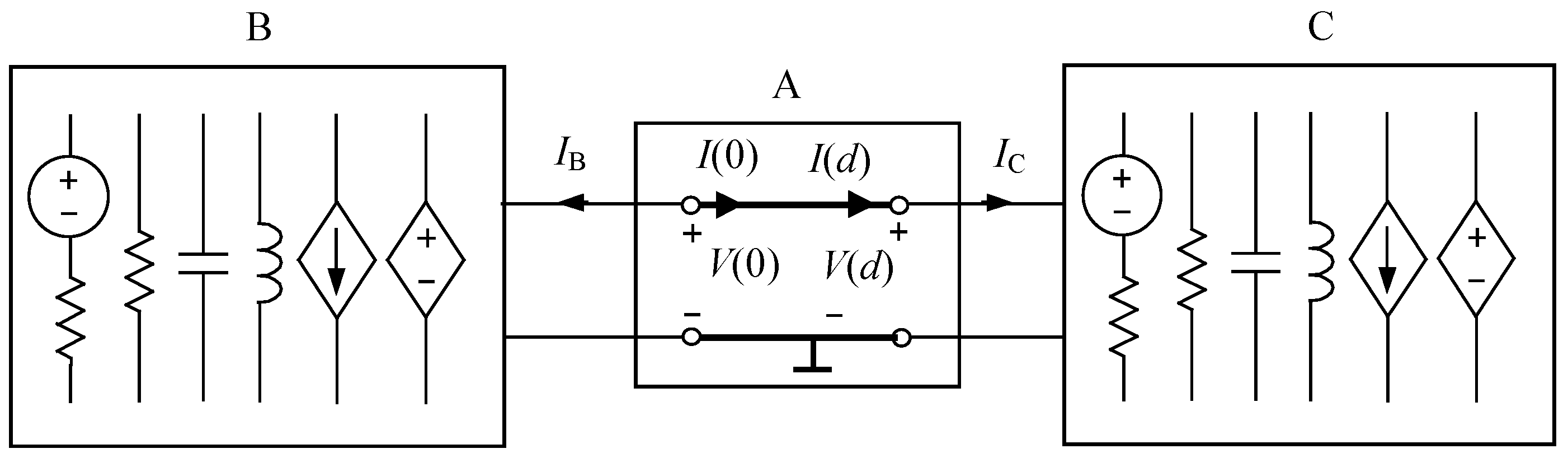
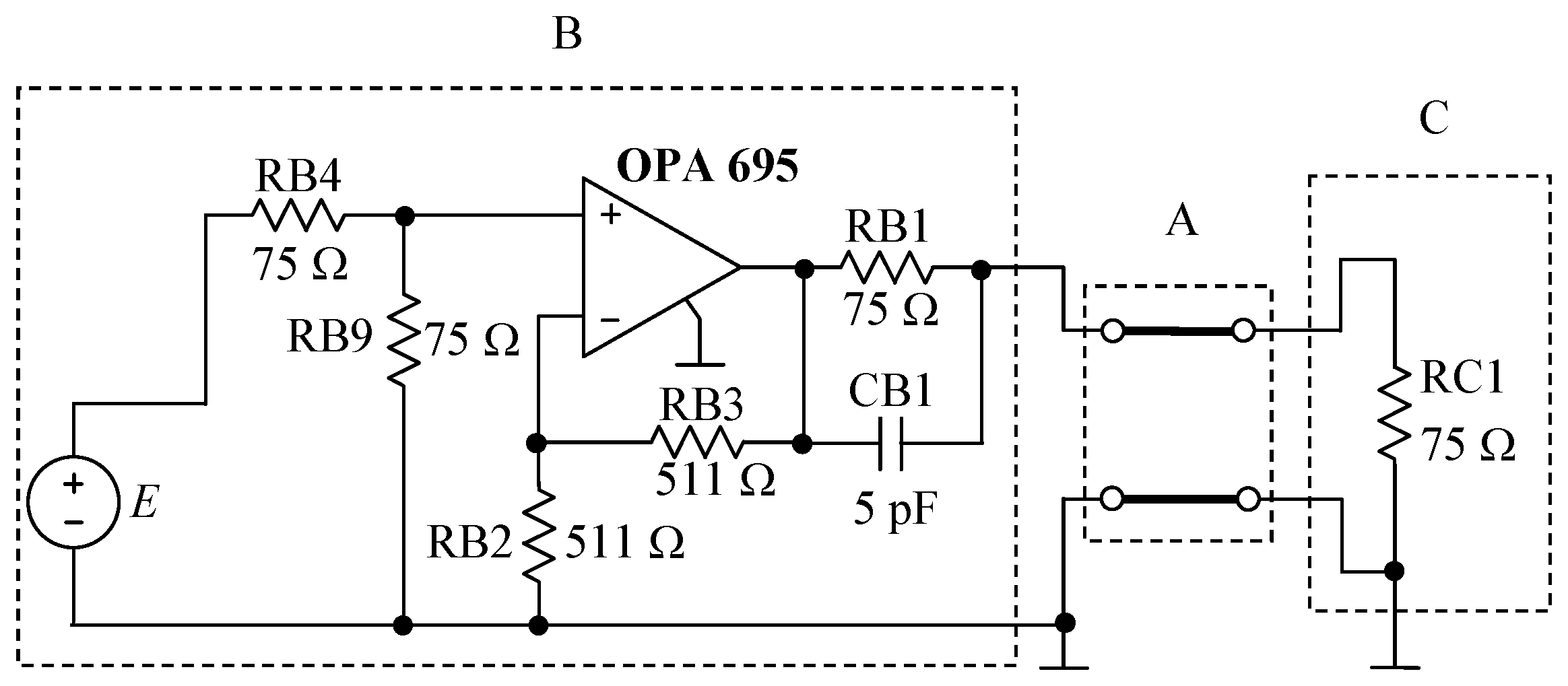
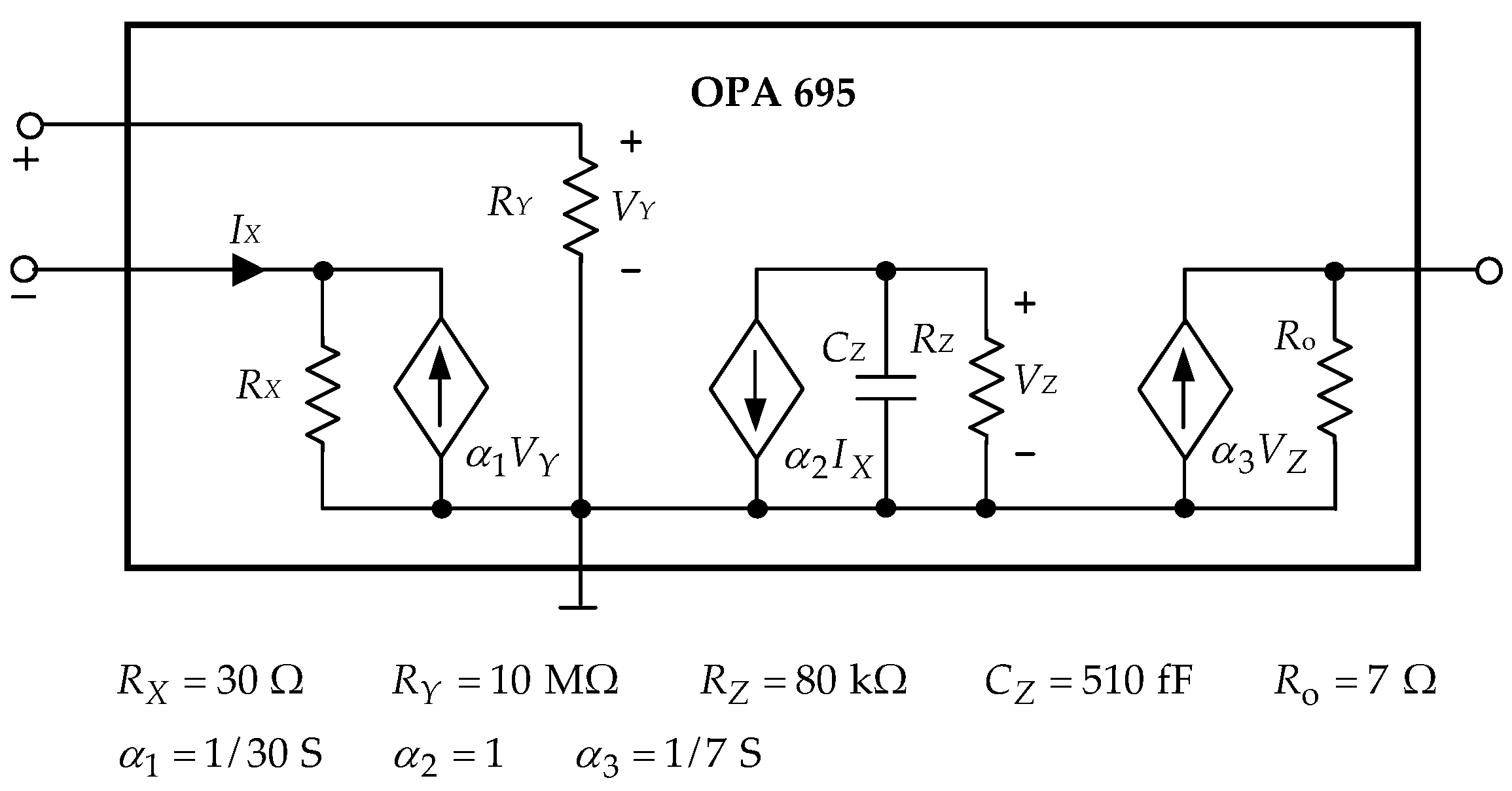
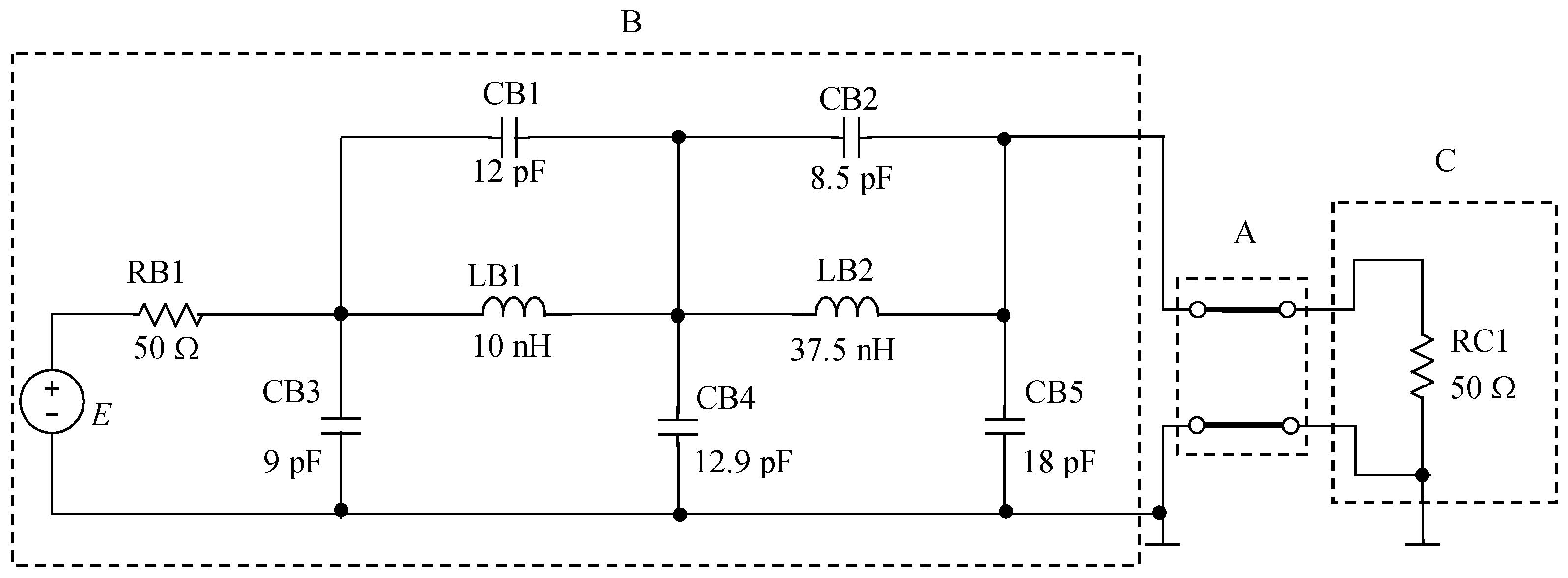
Figure 3 shows a basic wideband impedance-matched line driver, configured to drive a coaxial cable RG59 and 75 load. It includes the current-feedback operational amplifier, two-conductor DPTL, and lumped elements. The model OPA 695 used in the simulations is depicted in
Figure 4. For this model, very good compatibility of the frequency responses in the frequency range 100 Hz–200 MHz and the time responses was achieved compared to the full model available in the IsSPICE software.
The nominal values of the lumped elements existing in the circuit and in the OPA 695 model are indicated in
Figure 3 and
Figure 4, whereas the nominal p-u-l parameters of the DPTL are as follows:
,
,
,
, and the length
d of the line is 1 m. The amplitude of the voltage source
E is 2 V, and the phase is
,
. The accuracy of the measurements of the voltage amplitudes is
and of the phase
. The convergence tolerances and constants are:
,
,
,
,
.
In the circuit of
Figure 3, we diagnosed 5 faults of Block A, 17 faults of Block B, and 3 faults of Block C. In all these cases, the procedure for detecting the faulty block, described in
Section 2.1, gave the correct outcomes.
The findings of the diagnoses of five faults of Block A are placed in
Table 2. Every time, all the p-u-l parameters of the line are calculated. The relative error:
of the 20 parameter values presented in this table is as follows. In 15 cases
,
; in three cases
,
; in two cases, (10%),
. To obtain the results summarized in
Table 2, the iterative method, based on the iteration Formula (
8), was used. The number of iterations for finding
,
,
, and
(Step 1) ranges from six to 22 and for finding the p-u-l parameters (Step 2) is four in all the cases.
The outcomes summarized in
Table 3 are quite accurate;
does not exceed 0.7%. To diagnose Faults 1 and 2, the proposed iteration Formula (
9) was used because the sequences generated by the iteration Formula (
8) were not convergent. In the case of Fault 4, the method finds correctly the faulty resistor
, inserted in the table, and a virtual fault
. The number of iterations needed to determine each parameter value presented in the table varies from five to 13, and the CPU time does not exceed 0.33 s.
The findings inserted in
Table 4 are very accurate;
is smaller than 0.18%. The number of iterations ranges from five to eight, and the CPU time does not exceed 0.32 s.
The relative error
of the resistor values posted in
Table 5 is less than 0.7%; the number of iterations varies from five to six; and the CPU time does not exceed 0.36 s. In the cases of Faults 2 and 3 placed in this table, the method gives the correct faulty resistors and virtual ones. The virtual fault is
in Case 2 and
in Case 3. However, if the accuracy of the measurement in the diagnostic test course is increased (
for the amplitude and
for the phase), the method provides only the correct findings. Unfortunately, it is difficult to ensure such high accuracy in real conditions.
The relative error
of the outcomes placed in
Table 6 is less than 2.8%; the number of iterations ranges from 4–6; and the CPU time does not exceed 0.063 s.
Table 7 contains the results of the diagnosis of the faulty Block C. They were obtained performing 4–5 iterations and are burdened with very small relative error,
. The CPU time does not exceed 0.095 s.
4.2. Example 2
Let us consider the circuit, including the 150 MHz elliptical low-pass filter and the DPTL terminated by a resistor, shown in
Figure 5. The nominal values of the lumped elements are indicated in the figure, whereas the nominal p-u-l parameters of the DPTL are as follows:
,
,
,
, and the length
d of the line is 0.7 m. The amplitude of the voltage source
E is 5 V, and the phase is
,
. The accuracy of the measurements of the voltage amplitudes is
and of the phase
. The convergence tolerances and constants are:
,
,
,
, and
.
We performed 39 diagnoses including 4 faults of Block A, 30 faults of Block B, and 5 faults of Block C. In all cases, the procedure for detecting the faulty block, described in
Section 2.1, gave the correct results.
The outcomes of the diagnoses of four faults of Block A are summarized in
Table 8. In 11 cases
, the relative error
of the results provided by the method was less than 1%; in the remaining five cases
it is greater than 1%, but smaller than 2.2%. The number of iterations for finding
,
,
, and
(Step 1) ranges from five to six and for finding the p-u-l parameters (Step 2) from four to five.
In Block B, all the elements can be diagnosed except CB1 and CB2, because the sensitivities of the voltage of this block with respect to these elements are very small. Consequently, for realistic measurement accuracy, variations of these elements have a very small influence on the voltage. All the other elements of this block, RB1, CB3, CB4, CB5, LB1, and LB2, were diagnosed.
Table 9,
Table 10,
Table 11,
Table 12,
Table 13 and
Table 14 present 30 cases of the faults including five faults of the resistor RB1 and five faults of each of the capacitors CB3, CB4, and CB5 and the inductors LB1 and LB2.
The outcomes placed in
Table 9 are very accurate, and
. The number of iterations ranges from four to six, and the CPU time of each of the diagnoses does not exceed 0.1 s. To diagnose Fault 1, the proposed iteration Formula (
9) was used because the sequence generated by the iteration Formula (
8) was not convergent.
The findings presented in
Table 10 and
Table 11 are very accurate (
); the number of iterations varies from four to five, and CPU time does not exceed 0.21 s.
The maximum relative error of the results included in
Table 12 is
, and the number of iterations in all the cases is two. The CPU time is 0.16 s.
The outcomes summarized in
Table 13 and
Table 14 are very accurate;
. The number of iterations ranges from four to 14. The CPU time is 0.16 s.
The relative error
of the resistor values inserted in
Table 15 is less than 0.02%. The number of iterations varies from five to nine. The CPU time is 0.19 s. To diagnose Fault 1, the proposed iteration formula (
9) was used because the sequence generated by the iteration formula (
8) was not convergent.
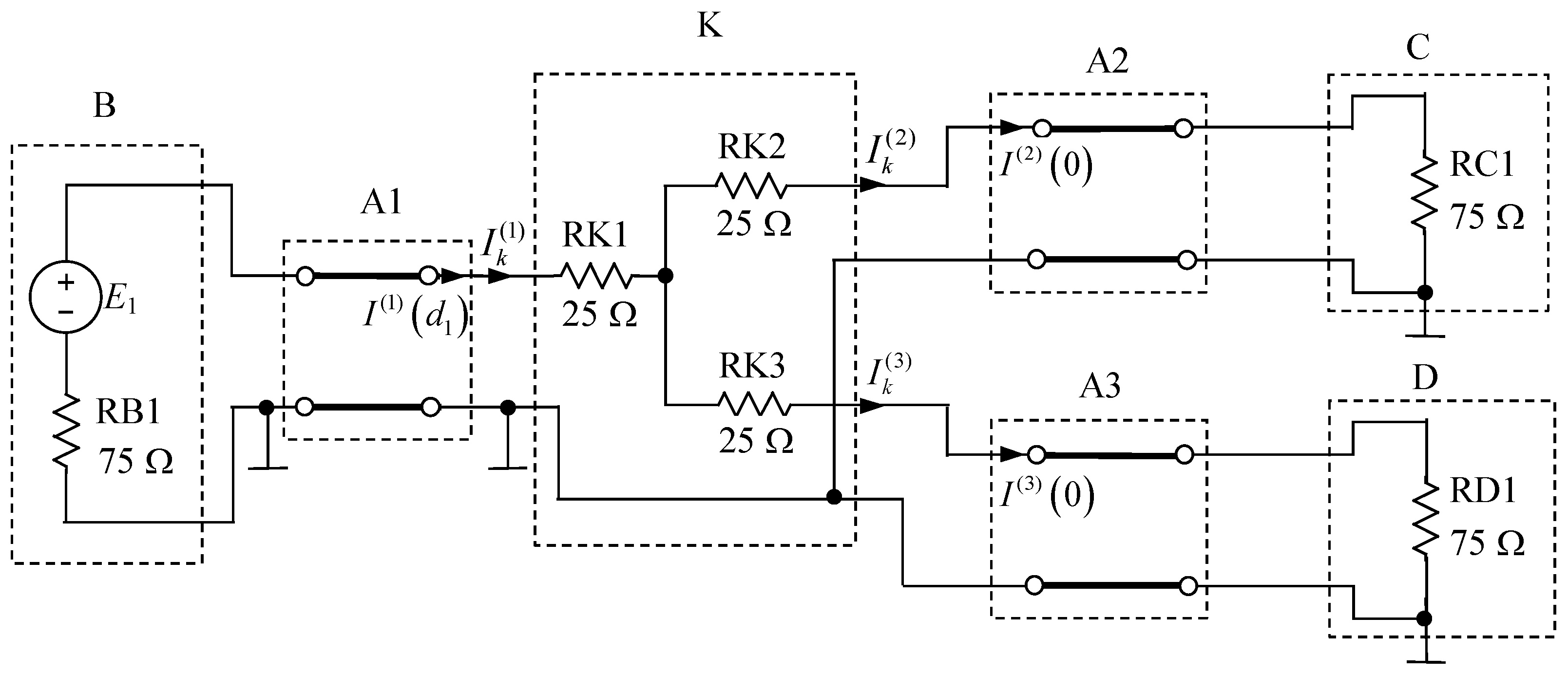
4.3. Example 3
Figure 6 shows the circuit including three DPTLs, A1, A2, and A3, having the p-u-l parameters:
,
,
,
. The lengths of the lines are
,
, and
. The nominal values of the lumped elements are indicated in the figure; the amplitude of the voltage source
equals 5 V; and the phase is
. The other parameters are as in Example 2.
The circuit of
Figure 6 has a more complex structure than that shown in
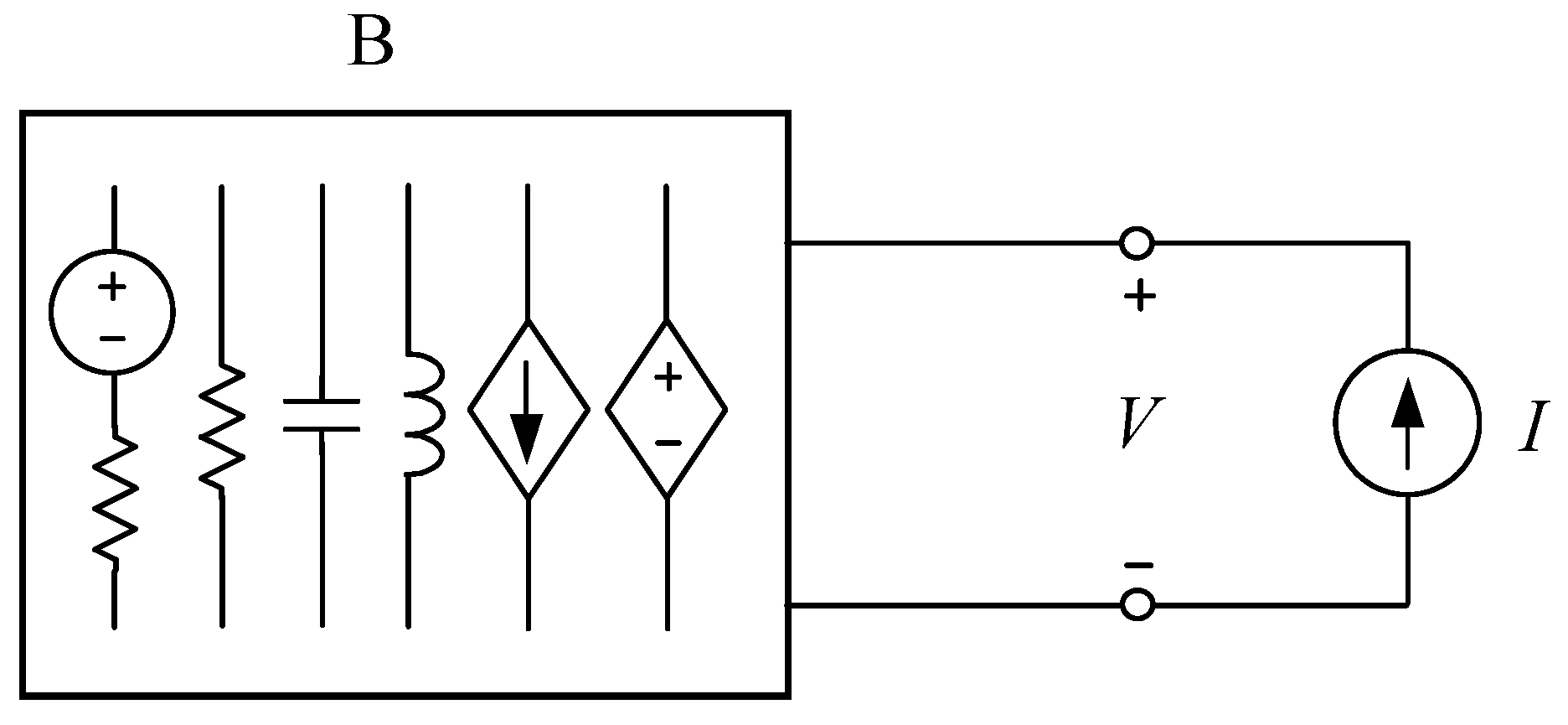
Figure 1. It consists of three blocks, A1, A2, and A3, containing DPTLs and four blocks, B, C, D, and K, including lumped elements. Similarly, as in
Section 1, we assume that only one block can be faulty and only one element of the lumped block can be defective. In the blocks containing DPTLs, all the p-u-l parameters may deviate from nominal values due to a fault, and all of them must be diagnosed. The diagnostic test of the circuit requires the input and output voltages of each DPTL. The fault detection rule presented in
Section 2.1 for three-block circuits can be directly extended to the circuit of
Figure 6. In particular, the three-port Block K is faulty if
,
,and
.
In the circuit of
Figure 6, we diagnosed three faults of each of Blocks A1, A2, A3, B, C, and D and nine faults of Block K. In all these cases, the procedure for detecting a faulty block gave correct outcomes.
The findings of the diagnoses of six faults of Blocks A1, A2, and A3 (24 parameters) are placed in
Table 16. In 18 cases (75%),
, and in six cases (25%),
. The number of iterations in Step 1 ranges from 4–7 and in Step 2 from 4–5.
Table 17 and
Table 18 present the results of the diagnoses of two faults in each of Blocks B, C, and D and six faults in Block K. To diagnose Block K, which is a three-port circuit, an obvious modification of the procedure described in
Section 2.3 is needed. The results are very accurate; the number of iterations ranges from 5–15; and the CPU time does not exceed 0.4 s. In three cases, corresponding to
,
, and
, the iteration formula (
9) was used because the iteration sequences generated by formula (
8) were not convergent.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}