Abstract
Carbon-based nanomaterials, including carbon nanotubes (CNTs) and graphene sheets (GSs), have garnered considerable research attention owing to their unique mechanical, physical, and chemical properties compared with traditional materials. Nanosensors are sensing devices with sensing elements made of nanomaterials or nanostructures. CNT- and GS-based nanomaterials have been proved to be very sensitive nanosensing elements, being used to detect tiny mass and force. In this study, we review the developments in the analytical modeling of mechanical behavior of CNTs and GSs, and their potential applications as next-generation nanosensing elements. Subsequently, we discuss the contributions of various simulation studies on theoretical models, calculation methods, and mechanical performance analyses. In particular, this review intends to provide a theoretical framework for a comprehensive understanding of the mechanical properties and potential applications of CNTs/GSs nanomaterials as demonstrated by modeling and simulation methods. According to analytical modeling, nonlocal continuum mechanics pose small-scale structural effects in nanomaterials. Thus, we overviewed a few representative studies on the mechanical behavior of nanomaterials to inspire the future development of nanomaterial-based sensors or devices. In summary, nanomaterials, such as CNTs and GSs, can be effectively utilized for ultrahigh-sensitivity measurements at a nanolevel resolution compared to traditional materials.
1. Introduction
In various fields of science and technology, nanomaterials, such as carbon nanotubes (CNTs) and graphene sheets (GSs), as well as CNT- and GS-based nanocomposites, have attracted considerable research attention owing to their unique structural, mechanical, and physical properties [1,2,3]. Graphene, also known as monolayer graphite, exhibits single-atom thickness, and a CNT can be regarded as a sheet of graphene rolled into a cylinder. Thus, CNTs and GSs often compete as alternatives to each other in certain applications because of several similarities in their characteristics. Hence, it is advantageous to combine CNTs and GSs and use them together for various applications [4]. Currently, CNTs and GSs have immense potential for designing nanosensing elements, because a nanomechanical resonator is an ultrasensitive sensor with high-frequency oscillation performance that depends on its mass and stiffness. Several studies have revealed that the elastic modulus of ultrasmall carbon-based nanomaterials can attain values as high as 1 TPa, which is stiffer than that of any known substance [5,6]. Owing to the outstanding material characteristics of CNTs and GSs, numerous studies have applied them as sensing elements in various nanosensors and nanodevices.
Nanotechnology has ushered in a new era in materials science and engineering. The research and development of nanomechanical resonator systems include various nanotechnologies, such as fabricating and controlling carbon-based nanomaterials, devising nanodevices, and modeling and computing analysis. The concept of systems integration of materials/devices/analysis for carbon-based nanomechanical resonators is illustrated in Figure 1. With extensive research on nanomaterials, nanoprocessing, and manufacturing technology, the developments of nanotechnology will enable high-sensitivity sensing and detection. To date, several researchers have applied carbon-based nanomaterials as nanosensing elements in biosensors [7,8], gas sensors [9,10], force and strain sensors [11,12,13], and printed CNT electronic sensors [14,15]. The fabrication and evaluation of CNT-derived screen-printed (SP) electrochemical sensors based on a CNT ink were reported [14]. The printed CNT-based flexible electronics allowed for implementation in sensing, providing a promising candidate for such printing processes which can offer stable devices with high performance [15]. Specifically, in CNT-based resonators, progressively high mass-sensing resolution has been achieved using CNTs as the resonating mass detector, realizing atomic-scale detection [16]. The results demonstrated that suspended CNTs can serve as a suitable resonator owing to their low effective mass and acceptable quality factor. Studies on GS-based nanomechanical sensors were conducted using a technique allowing natural frequency decomposition for only nanosheets with nanoparticles affixed to them [17,18]. The fundamental frequencies of triangular, circular, rectangular, and square GSs in equal attached atoms were investigated by modal analysis and compared together [17]. GSs can be utilized as an excellent sensitive balance for detecting nanoparticles.
Figure 1.
A schematic conception of carbon-based nanoelectromechanical system (NEMS) resonator integration.
Over the past two decades, an increasing number of papers and reviews have explored carbon-based nanomaterials, such as CNTs and GSs. In this review, we focus on mathematical modeling and differential governing equations to understand the advanced mechanical behaviors and sensing applications of carbon-based CNTs and GSs. In this regard, the sensing applications primarily included CNT/GS-based nanomass and nanoforce sensors, especially for assessing the working mechanisms on the basis of available theoretical analysis models and simulations. This research reviews and discusses the mechanical properties of carbon-based nanoresonators and their applications in nanomass and nanoforce sensors. First, we introduced the excellent mechanical properties of CNTs/GSs, including the theoretical analysis models that have been employed to simulate and characterize their mechanical properties, such as tensile strain and strength, vibration frequency, and buckling stability. Moreover, we discussed the nanomaterial properties of CNTs/GSs to assess their potential application in CNT/GS-based nanomass and nanoforce sensors. Thereafter, the CNT/GS-based nanoresonators were comprehensively described, including their detection mechanisms, modeling approaches, and major challenges and limitations of their application. Lastly, the conclusions of this review are summarized.
2. Mechanical Properties, Vibration, and Buckling of CNTs and GSs
2.1. Structure, Modeling, and Properties of CNTs
2.1.1. Measurements of Tensile Properties and Analytical Modeling
As reported in various scientific research fields, the discovery of CNTs was attributed to Sumio Iijima in 1991 [19]. Since then, extensive research activities have been conducted worldwide on CNTs because of their exceptional mechanical, thermal, and electrical properties [20,21,22,23]. The fundamental properties that render CNTs as a promising technology for various future applications include extremely high elastic modulus, strength, and tensile deformation up to a strain of 12% [24]. In addition, CNTs exhibit a perfect geometrical structure and nanoscale structure. Therefore, CNTs are ideal reinforcements for various structures and matrix materials used in composites. Owing to the high mechanical load-carrying capacity of CNTs in nanocomposites, the addition of only 1 wt.% CNTs increased the tensile strength of polystyrene-based composite films by 25% [25,26,27].
The performance of any CNT-based nanocomposites or nanostructures depends on the mechanical characteristics of CNTs. Therefore, the mechanical properties of individual CNTs, such as vibration frequency, buckling stability, strength, and deformation, require further investigation. Generally, the majority of the potential applications of CNTs are based on an understanding of their mechanical performance. Recent studies have involved both experimental measurements and theoretical analyses of the mechanical properties of CNTs [28,29,30,31,32,33,34]. The experimental methods for measuring the mechanical properties are based on the techniques of transmission electron microscopy (TEM) and atomic force microscopy (AFM). Treacy et al. estimated the elastic modulus of individual CNTs by employing an experimental method using TEM [28]. They observed TEM images of CNTs undergoing thermal vibration with its mean-square amplitude that was proportional to the temperature. Furthermore, they measured the amplitude of the intrinsic thermal vibrations, and the elastic modulus of multiwalled CNTs (MWNTs) was evaluated to be 1.8 ± 0.9 TPa. Wong et al. measured the bending force of MWNTs using the tip of AFM and derived a slightly lower value of 1.28 ± 0.59 TPa [29]. Krishnan et al. measured the elastic modulus of single-walled CNTs (SWNTs) in the diameter range of 1.0–1.5 nm. The mean value of 27 nanotubes has been estimated to be ~1.25 TPa [30]. However, the direct measurement of the mechanical properties is remarkably difficult because of the CNTs’ nanoscale dimensions. The experimental results were derived from indirect predictions based on the mechanics of vibration and bending beam theory. In the experimental measurements, the simplified continuum beam theory of CNTs can be utilized to evaluate the elastic modulus, assuming small bending deformations and large aspect ratios. The motion of the CNT beam governed without rotary inertia and shear effects can be expressed as
where u(x, t) denotes the displacement, x denotes the axial coordinate, t indicates the time, ρ denotes the mass density of CNT, A indicates the cross-sectional area, p represents the distribution of the transverse loading, E denotes the modulus of elasticity, and I indicates the moment of inertia of the cross-section.
According to Equation (1), the natural frequency of the CNT beam for the j-th vibration mode yields
where L denotes the length of the CNT beam, and indicates the root of an eigenvalue equation dependent on the boundary conditions. For the boundary condition of clamped at one end and free at the other end, this equation can be stated as . Thus,, , and can be derived as mode values corresponding to the one, two, and three half-waves, respectively.
The elastic modulus of CNTs can be obtained on the basis of the relationship expressed in Equation (1) by indirectly measuring the vibrational frequency and using the classical Euler–Bernoulli beam theory. However, the measurement accuracy of the elastic modulus obtained from the vibrational frequency is strongly affected by the supported boundary conditions. Natsuki et al. [31] developed an accuracy theoretical model, considering nonlocal interactions and boundary condition effects of cantilever support. As depicted in Figure 2, the cantilever boundary condition of the CNT beam was considered to be elastic support instead of fixed support. For the CNT beam with length L and diameter D, L1 and L2 denote the clamped and exposed lengths of the CNT beam, respectively. According to the nonlocal Euler–Bernoulli beam model [32], the governing differential equation for the transverse vibrations of CNTs can be expressed as
where x and t denote the axial coordinates and time, respectively, represents the deflection of CNT, E denotes the elastic modulus, I indicates the moment of inertia of the cross-sectional area A, denotes the mass density, represents the nonlocal parameter, considering that is suitable for the material, and a denotes the characteristic internal length of a C–C bond (0.142 nm), which is the length of the covalent bond between two carbon atoms. The interaction force between the CNT and the clamping elastic foundation represents the distributed transverse pressure exerted on the CNT beam under the clamping force. denotes the spring constant relative to the stiffness of the elastic foundation materials.
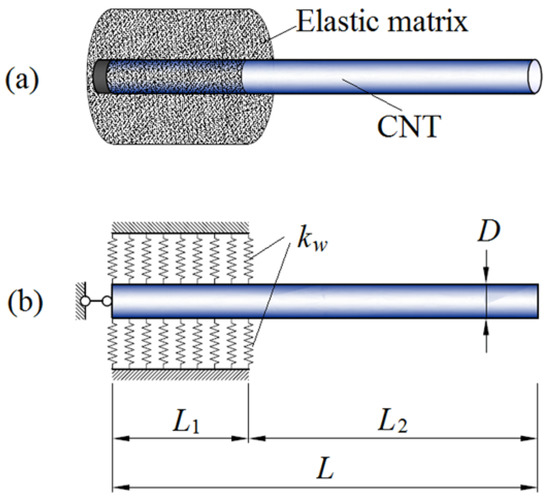
Figure 2.
Clamped CNT beam embedded in an elastic foundation: (a) Schematic illustration, (b) Theoretical analysis model. Adapted with permission from Ref. [31]. 2018 Elsevier.
According to the proposed elastic boundary conditions of the CNT beam, the simultaneous solution of the governing equations of Equations (3) and (4) yields the following [31]:
where M denotes an matrix with parameters of vibration frequency , elastic modulus , and CNT dimension with clamped and exposed lengths .
Therefore, the elastic modulus of CNTs can be accurately predicted by measuring the natural frequencies of the CNT beam from the condition of a nontrivial solution of stated in Equation (5). The influence of the clamping stiffness at the elastic support end on the accuracy of predicting elastic modulus is displayed in Figure 3. When the length ratio of clamping to CNT length was larger than 40%, the elastic modulus of CNTs approached unity as the stiffness of the clamped segment increased. As observed, the elastic modulus was more sensitive to the clamping length of the CNT beam supported by a lower stiffness foundation. Notably, the clamping length and stiffness significantly influenced the resonant frequency of the CNT beam, especially at short clamping lengths.
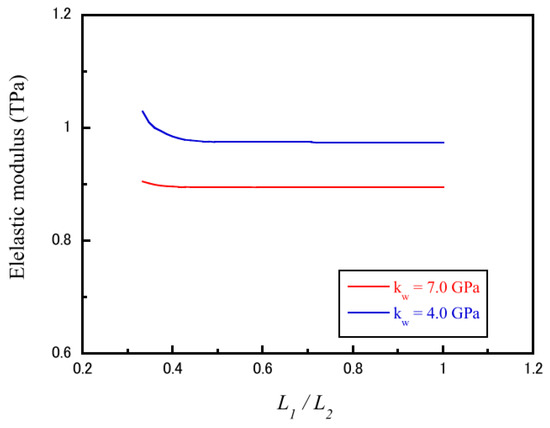
Figure 3.
Influence of clamping stiffness on the elastic modulus of CNTs as a function of the ratio of clamped to exposed lengths. Adapted with permission from Ref. [31]. 2018 Elsevier.
Moreover, Yu et al. [33] employed a direct measurement method applying a tensile force on CNTs to determine the tensile strength and modulus of single-walled CNTs (SWCNTs) in the ranges of 11–63 GPa and 0.27–0.95 TPa, respectively. These experimental tests both directly and indirectly contributed to confirming the excellent mechanical properties of CNTs. However, they encountered challenges in determining the dependence of CNT structures, such as zigzag, chiral, and armchair CNTs on the mechanical properties. To overcome such limitations of experimental procedures and avoid large error bars, computational simulations have been regarded as a powerful tool for accurately predicting the mechanical properties of CNTs. Using an atomistic-based model, several theoretical studies have attempted to accurately predict the mechanical properties of nanomaterials and individual CNTs [24,34,35,36,37,38,39]. These studies demonstrated that theoretical simulations can effectively investigate and predict the influence of the CNT structures on the stress–strain responses of the materials.
The structures of SWCNTs can be regarded as graphitic cylinders formed by rolling graphene sheets. A schematic of unrolled hexagonal graphene sheet is illustrated in Figure 4. The atomic structure of CNTs can be indexed by a pair of integers (n, m) corresponding to a lattice vector on the graphite plane, where and denote the unit vectors of the two-dimensional hexagonal lattice. n and m are called the chiral index and are integers satisfying 0 ≤ |m| ≤ n. The integers (n, m) uniquely determine the size of SWCNTs. The symmetry groups of carbon nanotubes are represented as the zigzag tube (m = 0) when θc = 0° and the armchair tube (m = n) when |θc| = 30°.
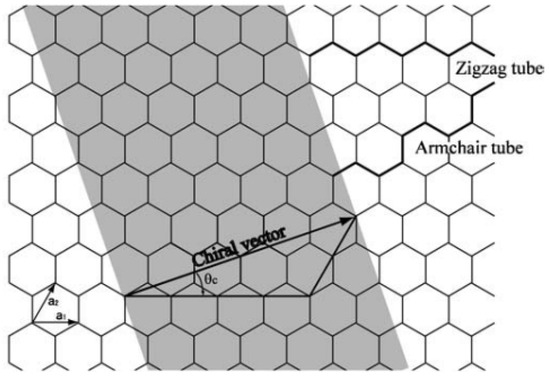
Figure 4.
Schematic illustration of a hexagonal graphene sheet.
In contrast, the chiral tube exhibits a general direction with 0 < |θ| < 30° or n > m > 0. As depicted in Figure 5, the tensile stress–strain responses of the three distinct CNT structures were obtained according to the continuum elasticity theory. As observed, the axial tensile stresses exhibited nonlinear dependence as a function of strain, and the elastic modulus was independent of the helicity of CNTs. According to this simulation, the stress–strain curve could be well-fitted by a binomial expression, (in TPa) [37]. The linear elastic property of the CNTs was independent of the helicity of the hexagonal carbon lattice along the tubes, whereas their nonlinear elastic behavior exhibited a stronger dependence on chirality. Al-Kharusi et al. [39] conducted an atomistic finite element analysis to evaluate the energy stored in the SWCNT. In the finite element model, the force interaction between the carbon atoms in an SWCNT was modeled using load-carrying structural beams.
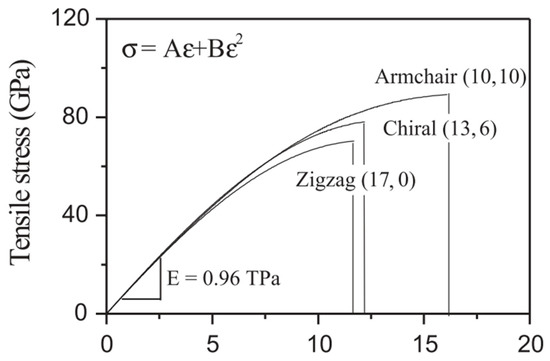
Figure 5.
Stress–strain curves of CNTs with different helicities under tension load. Adapted with permission from Ref. [37]. 2005 Springer-Verlag.
2.1.2. Vibrations, Buckling, and Modeling
The field of miniature mechanical oscillators is rapidly evolving with emerging nanomaterials, simulation, and process technologies. Owing to the miniaturization of mechanical oscillators to the molecular scale, such as in CNT resonators, their vibrations are increasingly coupled and interact strongly, even under feeble thermal fluctuations [40,41,42,43,44]. Barnard et al. reported the direct real-time measurements of thermal vibrations of a CNT using a high-fidelity micrometer-scale silicon nitride optical cavity as a sensitive photonic microscope [40]. They discovered a realm of dynamics undetected by previous time-averaged measurements and room-temperature coherence, which were almost three orders of magnitude longer than that reported earlier. Their experimental research pioneered the study of nonlinear mechanical systems in the Brownian limit (i.e., when a system is driven solely by thermal fluctuations). Subsequently, several studies reported that CNT electromechanical resonators exhibited unprecedented sensitivity for detecting small masses and forces, which establishes the advantages of using CNTs as a nanosensor for such applications. Willick et al. reported the use of a cold heterojunction bipolar transistor amplifying the circuits near a device to measure the mechanical amplitudes on the microsecond timescales [42]. Sazanova et al. investigated the electrostatic actuation and detection of doubly clamped CNT oscillators [43]. They demonstrated that the resonance frequency could be widely tuned, and the devices could be used to measure extremely small forces.
The natural frequency and buckling load of CNTs must be determined to realize the application of CNTs as nanosensing materials. However, most studies on the vibrational property and buckling instability of CNTs have been performed on theoretical modeling and simulation because of having difficulty in experimental research. As such, molecular and solid mechanics have been developed to fundamentally describe the properties of material with micro- and macrostructures. Although atomic simulation is adapted for nanomaterials with microstructures, they are limited to extremely small sizes as it requires enormous computational power. A nanoscale continuum model considering nonlocal parameters or an atomic-based continuum model coupled with atomistic models has been regarded as an effective method for simulating and predicting the mechanical properties of nanomaterials (e.g., CNTs and GSs). This review discusses the recent efforts on addressing the problem of modeling and simulation.
The Bernoulli–Euler beam theory described in Equation (1) has been applied for large aspect ratios and small deformations. In the case of short CNT beams and higher modes, the shear effect should be considered because the effects of through-thickness shear deformation and rotary inertia become extremely significant. Compared to the Euler–Bernoulli theory, the Timoshenko beam theory is more accurate, especially for high-frequency resonances of CNT beams. For the Timoshenko theory [45,46,47], the transverse deflection and the slope caused by bending are governed by the following coupled differential equations:
where denotes the shear coefficient depending on the cross-section shape, and G represents the shear modulus of the CNT beam.
Unlike the aforementioned constitutive equation in classical elasticity, Eringen’s nonlocal elasticity theory [48,49] states that the stress at point x in a body depends on the strain at that point and all points of the body. The relationship between the stress and strain is expressed as , where denotes the internal characteristic length, and indicates constant suitable for each material [50]. The nonlocal elasticity theory can be advantageous for nanotechnology simulation applications because the nonlocal continuum mechanics model can consider the small-scale effect that emerges as significant in the case of micro- or nanostructures with discrete domains.
The governing equation for the nonlocal Euler–Bernoulli beam model can be expressed as follows [50]:
Considering the effect of the small length scale, Wang et al. [51] and Lu et al. [52] presented the governing equations for the nonlocal Timoshenko theory as follows:
According to these governing equations of the CNT beam and the given supported boundary conditions, the vibrational frequencies can be obtained using an analytical approach [53].
The vibration frequency ratio of CNTs is portrayed in Figure 6 as a function of length-to-diameter under various vibrational modes (N) [54], wherein subscripts NT and TE indicate the nonlocal Timoshenko (NT) beam model and nonlocal Euler (TE) beam model, respectively. As observed, the variations between the results obtained from NT and NE were negligible for long CNTs, i.e., L/d > 20, for the fundamental mode number (N = 1). Moreover, it is confirmed by the negligible shear effect for long nanotubes that the Timoshenko beam theory is more effective than the Bernoulli–Euler beam theory for short lengths because of the shear effect.
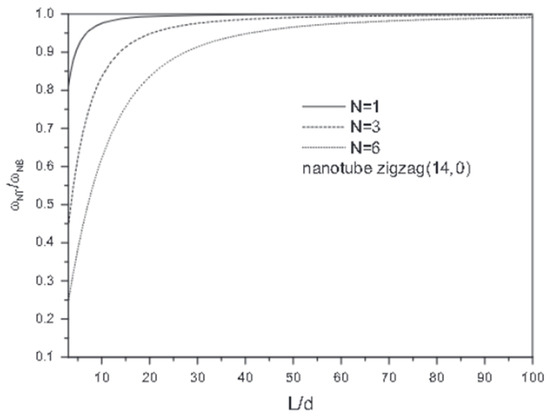
Figure 6.
The values of frequency ratios of zigzag carbon nanotube, with respect to length-to-diameter ratio for different mode numbers (N) using the nonlocal Timoshenko beam model (NT) and nonlocal Euler beam model (NB). Adapted with permission from Ref. [54]. 2014 Elsevier.
For double-walled CNTs (DWCNTs) with hollow two-layer structures, the deflection of the nested tubes is coupled by the van der Waals (vdW) force between the inner and outer nanotubes [55]. The interaction pressure at any point between the two adjacent nanotubes can be regarded as a linear function of the jump in deflection at that point, related as , in which denotes the intertube interaction coefficient per unit length between the inner and outer nanotubes. Furthermore, de Borbon et al. investigated the influence of the vdW interaction coefficient on the vibration behavior of DWCNTs [56]. The vdW interaction force between two carbon atoms of CNTs is expressed as the Lennard–Jones potential, which is widely used to describe the attractive interactions between nonpolar molecules. In certain studies, the vdW interaction coefficient depends only on the nanotube radii and the carbon bond length and expressed as follows [57,58,59,60]:
where R denotes the inner nanotube radius, and indicates the length of the carbon–carbon bond.
More recently, Saito et al. [59] provided new data according to which the vdW interaction coefficient was expressed as .
He et al. [60] presented explicit formulas for the vdW interaction between any two layers of multiwalled CNTs. The vdW force was estimated by the first-order Taylor expansion with respect to the equilibrium position and stated as
where denotes the distance between the interacting atoms, and indicates the initial distance between atoms of various tubes. The integration of Equation (12) over the entire nanotube yields an analytical representation of the initial pressure contribution caused by the vdW interaction and is expressed as
where
and where and denote the inner and outer radii of DWCNTs, and and represent the vdW radius and the well depth of the Lennard–Jones potential, respectively. The vdW parameters in the Lennard–Jones potential are regarded as and [59].
In the analysis of buckling behavior, the differential equations of the nonlocal elasticity for CNTs subjected to an axial load can be expressed as follows [61,62,63,64,65,66]:
- For the Bernoulli–Euler beam theory,
- For the Timoshenko theory beam theory,where denotes the transverse deflection of the CNT beam, represents the slope, and P denotes the internal axial compressive loading.
The accurate and approximate solutions for the axial buckling load of CNTs under varying boundary conditions can be obtained from various approaches, such as the mathematical analysis of differential equations and the Bubnov–Galerkin method [67,68].
2.2. Mechanical Properties, Vibration, and Buckling Analysis of GSs
2.2.1. The Tensile and Bending Mechanical Properties
GSs are a two-dimensional nanosubstance composed of a sheet of carbon atoms arranged in a regular hexagonal pattern. The GSs, the first truly two-dimensional materials, were discovered by Novoselov et al. in 2004 [69], for which they were awarded the Nobel Prize in Physics 2010. GSs have garnered considerable research interest owing to their excellent characteristics, such as large specific surface area, high strength and flexibility, and high thermal and elasticity conductivities [70,71,72,73].
Garcia-Sanchez et al. [74] determined the mechanical properties of multilayer GSs (MLGSs) suspended over trenches in silicon oxide for nanoelectromechanical systems, as depicted in Figure 7. The motion of the suspended MLGSs was electrostatically driven at resonance by applying radio frequency voltages.
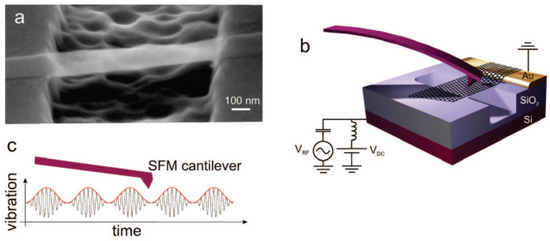
Figure 7.
Device and experimental setup: (a) a scanning electron microscope image of a suspended graphene resonator; (b) schematic of the resonator together with the SFM cantilever; (c) motion of the suspended graphene sheet as a function of time. Adapted with permission from Ref. [74]. 2008 American Chemical Society.
By modeling the suspended MLGSs with the finite element method, these edge eigenmodes were attributed to the result of nonuniform stress with remarkably large magnitudes (up to 1.5 GPa). AFM has been a major experimental approach for studying the mechanical properties of GSs. Using an AFM, Frank and Tanenbaum [75] measured the effective spring constants of stacks of MLGSs within five layers suspended over trenches in silicon dioxide. The elastic modulus of the MLGSs was experimentally investigated with force–displacement measurements. The spring constants ranging from 1 to 5 N/m were observed for suspended GSs. As such, the elastic modulus could be obtained by examining the various spring constants with the displacement of the suspended GSs. Lee et al. [76] examined the elastic properties and the intrinsic breaking strength of freestanding GSs by nanoindentation under AFM, reporting that defect-free GSs exhibited an elastic modulus of 1.0 TPa and a fracture strength of 130 GPa. These experimental results demonstrated that GSs could provide excellent mechanical properties, such as bending flexibility, tensile elastic modulus, and strength. However, the mechanical behavior could not easily be derived from the experiments due to nanomaterials with extremely small sizes, especially for single-layer graphene sheets.
In the existing literature, certain numerical investigations have been conducted to investigate the mechanical characteristics of single-layer GSs [77,78,79,80]. Gao and Hao reported a comprehensive analysis of the mechanical behavior of monolayer graphene under tensile and compressive loading [77]. The failure mechanisms of zigzag and armchair GSs were investigated. The variations between the mechanical behavior of two typical graphene structures were derived from theoretical analysis, which cannot be obtained through experimental tests. The results demonstrated that the tensile failure and buckling failure of zigzag graphene were larger than those of armchair graphene. On the basis of the equivalence molecular potential energy, Natsuki et al. predicted the mechanical behaviors of boron nitride (BN) nanosheets, including the elastic modulus, shear modulus, and Poisson’s ratio [80]. The elastic modulus of the BN nanosheets was calculated to be 0.9–1.0 TPa, and the Poisson’s ratio of the BN nanosheets ranged from 0.09–0.15. Overall, the Young’s modulus and Poisson’s ratio were independent of the chirality of the BN nanosheets.
2.2.2. Analysis Modeling, Buckling Instability, and Vibration Properties
The buckling and vibration properties of GSs are essential for applying GSs as components in sensors or other nanodevices. Researchers have investigated the mechanical stability and vibration properties of GSs using multiple approaches. As controlled experiments on the nanoscale are extremely difficult, modeling and simulations constitute an effective approach for predicting the static and dynamic properties of nanomaterials. However, molecular dynamics (MD) simulations are time-consuming and expensive, especially for large-scale complexes. Comparing the results obtained from nonlocal continuum mechanics with those from MD simulations, nonlocal continuum mechanics can successfully describe the mechanical behaviors of nanomaterials [81,82,83]. In recent years, numerous studies exploring the mechanical behaviors of GSs, such as buckling instability [84,85,86] and vibration properties [87,88,89,90,91], have been performed according to the nonlocal theory.
As the nonlocal theory contains information on the forces between atoms, the stress depends on the strain at the individual point and all points of the component. According to the nonlocal continuum theory, an internal scale length is introduced into the constitutive equations.
According to the plate theory modified by the nonlocal parameters of , the general governing equations for the free vibration of GSs with in-plane loads are expressed as follows [90,91,92,93,94]:
where the bending stiffness , and E, h, and are the Young’s modulus, thickness, and Poisson’s ratio of GSs, respectively. and , including the normal and shear directions, denote the in-plane force acting on the GSs. and represent the mass moments of inertia, defined as
For the upper and lower layers (nanoplate-1 and nanoplate-2) of double-layered GSs (DLGSs), the pressure can be assumed to be linearly proportional to the deflection between the nanoplates. Thus, the governing differential equations can be described by the following two coupled equations:
Nanoplate-1:
Nanoplate-2:
where c denotes the vdW interaction coefficient between the top and bottom layers.
Golmakani et al. [95] presented the governing equations of buckling analysis of biaxially compressed DLGSs based on nonlocal elasticity theory considering shear stiffness, expressed as follows:
Nanoplate-1:
Nanoplate-2:
where denote the bending stiffness, and denote the shear stiffness, considering the shear correction factor.
The DLGSs are composed of two GS layers coupled with each other via vdW force. The vdW interaction coefficient c between the upper and lower layers can be obtained on the basis of the Lennard–Jones potential and expressed as follows [96]:
where denotes the characteristic internal length of the C–C bond, which is 0.142 nm. denotes the depth of the potential, and indicates a parameter determined from the equilibrium distance evaluated by the physical properties of the material. , where denotes the coordinate of the j-th nanolaser in the thickness direction with the origin at the midplane of the GSs.
Kitipornchai et al. [97] derived an explicit formula for predicting the vdW interaction between any two sheets of a multilayered GS, which is expressed as
For the DLGSs, the initial interlayer space was presumed as 0.34 nm, and the values of the interaction coefficients were calculated to be 108 GPa/nm. Thus, the vdW interaction hardly affected the mechanical properties, such as the buckling stability and the natural frequency, for lower-order modes of GSs, whereas the other higher-order parameters were significantly reliant on the vdW interaction.
3. Analytical Modeling and Application of CNTs and GSs as Nanosensor Materials
3.1. CNTs and GSs Used for Nanomass Sensing Applications
Carbon-based nanomaterials, such as CNTs and GSs, are employed in numerous technical applications owing to their excellent features of high stiffness and strength with extremely small size. As reported, CNTs and GSs hold immense potential as resonators for nanoscale mass or force sensing [98,99,100,101,102]. In these experimental studies, controlling the mechanical motion of objects becomes a formidable challenge for fundamental science and engineering. Jensen et al. demonstrated a CNT-based nanomechanical resonator with an atomic mass resolution [98], which successfully measured a certain number of gold atoms placed in an ultrahigh vacuum. The detection technique was based on the nanotube radio-receiver design and relied on the unique field-emission properties of the CNTs. In principle, this device acted as a mass spectrometer with a mass sensitivity of 1.3 × 10−25 kg/Hz1/2.
Lassagne et al. [103] used extremely small CNTs with a diameter of 1 nm as a nanomechanical resonator for mass sensing. The resonance frequency was measured at room temperature and vacuum of ~5 × 10−6 mbar in an evaporator. In Figure 8, the schematics illustrate (a) the mass-sensing experimental setup, and the (b) measurement circuitry.
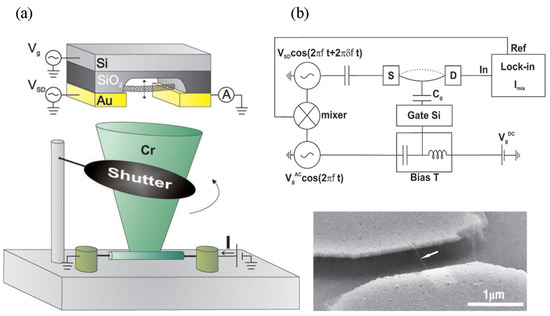
Figure 8.
Schematic of experimental setup for mass sensing: (a) chromium atoms were deposited onto the nanotube resonator in a Joule evaporator, and the mass of the atoms adsorbed on the nanotube was measured; (b) measurement circuitry. Adapted with permission from Ref. [103]. 2008 American Chemical Society.
As depicted in Figure 8a, the chromium atoms were evaporated onto a nanotube resonator in the mass-sensing experiments. The experiment was performed in a Joule heating metal evaporator, and the mass of the atoms adsorbed on the CNT resonator was actuated and measured by electrostatic interactions. In Figure 8b, when a voltage oscillating at a frequency was applied on the Si package of the wafer, an oscillating electrostatic force was generated on the CNT at the same frequency and expressed as
where denotes the derivative of the capacitance between the CNT and backage, and indicates the DC voltage applied on the gate.
The -induced motion of the CNTs was detected using a capacitive technique. The conductance of CNT depends on its electronic charge, controlled by the gate capacitance . To track the high-frequency charge modulation, a mixing technique was employed by applying the voltage on the gate and on the source (Figure 8b). According to the measurement of a mixing current on the drain at a frequency variation of , the shifts of the resonance frequency were obtained as a function of the deposited mass. The can be expressed as
where denotes the transconductance of the CNT, indicates the electronic phase emerging from the electronic circuitry, and represents the phase between and the mechanical motion.
In particular, the shift in the mechanical resonance frequency of the CNT resonator across varying periods for 160 zg of Cr (~1860 Cr atoms) deposited onto the CNT (Figure 9a) and the shift in the resonance frequency (Figure 9b) were obtained as a function of the deposited mass.
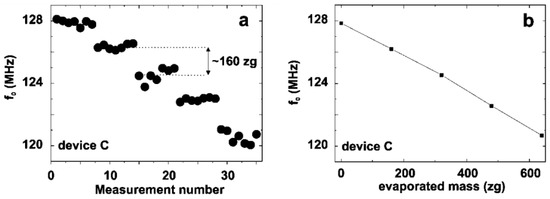
Figure 9.
Mass-sensing experiment obtained from (a) resonance frequency measured sequentially, and (b) resonance frequency as a function of the mass evaporated on the nanotube. Adapted with permission from Ref. [103]. 2008 American Chemical Society.
The slope given the mass responsivity of the CNT resonator was . As reported by Lassagne et al. [103], the exceptional mass responsivity (resonance frequency shift per unit mass change) can be attributed to the ultralight mass and high stiffness of the CNTs. Li and Zhu [104] proposed an optical detection technique with a sensitivity of a single atom using a surface plasmon and a double-clamped CNT resonator.
GSs with ultrathin two-dimensional nanomaterials are regarded as an ideal candidate for nanoelectromechanical resonators used as mass and force sensors because of their excellent mechanical properties, large surface area, and ultralight weight. In experimental research, Bunch et al. [105] demonstrated that GSs exhibit fundamental resonant frequencies in the megahertz range, which can be actuated either optically or electrically and detected optically using interferometry. Sharma et al. [106] reviewed the electronic applications of GS mechanical resonators for future-generation radiofrequency communications and ultrasensitive mass and temperature detection. They envisioned that the nonlinear characteristics of GS resonators can enable ultrasensitive mass detection using a GS mass spectrometer.
3.2. Modeling and Analysis of CNT- and GS-Based Nanomass Sensor
In the existing literature, the experimental results demonstrated that nanomaterials, such as CNTs and GSs, can be selected to construct versatile nanomechanical resonators. The detection mechanism of nanomass sensors is based on the resonant frequency shift occurring upon affixing a nanomass to the CNTs. The resonant frequency is sensitive to the resonator mass of a nanosensor system, including the mass of the resonator and measured mass that attached to the resonator. Therefore, the variations in the resonant frequency induced by the attached mass must be characterized. To date, several theoretical methods, such as the molecular structural mechanics method [107] and the continuum mechanics approaches [108,109,110,111,112], have been employed to predict the additional mass. Li and Chou [107] initially studied CNT-based nanomass resonators, which were assumed to be either cantilevered or bridged beams. The relationship between the resonant frequency of a CNT resonator and the attached mass was established by adopting the proposed approach of molecular structural mechanics [113]. In the research, the natural frequency was obtained by simulating a CNT as an equivalent space frame-like structure and solving the motion equation of the system [107]. The governing equation of the motions can be expressed as follows:
where and denote the global mass and stiffness matrices of the analytical system, respectively, and and represent acceleration vector and the nodal displacement vector, respectively.
Moreover, applying the static condensation method, the fundamental frequencies and mode shapes were obtained from the solution of the eigenproblem and expressed as
where and denote the condensed stiffness matrix and mass matrix, respectively, represents the displacement of the carbon atoms, and indicates the angular frequency.
Using the molecular structural mechanics method, the variations in resonant frequency, , can be evaluated using a tiny mass with a mass matrix of , added to the resonator to generate a matrix with the total sensor system. The simulated results indicated that the mass sensitivity of the CNT resonator attained at least 10−21 g, and a logarithmic, linear relationship existed between the resonant frequency and the attached mass for a mass heavier than 10−20 g. Moreover, the results validated the sensitivity of the resonant frequency shifts toward both the length and the diameter of the CNTs, which can be utilized to improve the range of the nanomass measurement. Applying the continuum mechanics approach, Natsuki et al. [114,115,116,117] performed a theoretical analysis of the vibration frequency in CNT- and GS-based nanomechanical mass resonators. In addition, Shen et al. [109,110] analyzed the vibration behaviors of DWCNTs according to the nonlocal Timoshenko beam theory and those of SLGS-based nanomass sensors [118] according to the nonlocal Kirchhoff plate theory. Natsuki et al. [115] reported a vibration analysis of a nanomechanical mass sensor using rectangular DLGSs as nanoresonators. Furthermore, Patel and Joshi [119] derived a second-order differential equation governing the curved DWCNTs according to Euler beam theory and Hamilton principles. Th next section reveals the general differential equations of CNTs and GSs, which are typically used by theoretical research on mass-sensing applications.
3.2.1. Modeling and Differential Equation for CNT Beams
Natsuki et al. proposed an approach for building a mass sensor based on a double-end-fixed CNT with an applied tensile load and carrying an attached concentrated mass. Using the continuum model with the Euler–Bernoulli beam, the governing equation of motion of a freely vibrating CNT under the axial tensile load N can be expressed as follows [114]:
where denotes the flexural deflection, and indicates the axial tensile load acting on the CNT.
Accordingly, the relation between the boundary conditions and the nanomass, , regarded as a concentrated mass, can be expressed as
where and denote the vibration amplitudes on the left- and right-hand sides of the attached mass, , along the CNT length position of , respectively.
Furthermore, Natsuki et al. investigated the resonant frequencies and frequency shifts of the CNTs with the attached nanomass using the nonlocal Euler–Bernoulli beam model, developed to incorporate the size effect by introducing an intrinsic length scale, which provided information regarding the forces between atoms. The governing equation of motion in continuum mechanics was obtained for a CNT beam subjected to an axial tensile load N and expressed as follows [120]:
where denotes the nonlocal parameter relative to the carbon material, and a denotes the internal characteristic length of the C–C bond, which was determined to be 0.142 nm.
The boundary condition including the term of the attached nanomass, , can be expressed as
Upon substituting the solutions of the governing equations of motion into the boundary conditions, simultaneous equations containing the vibration frequency of the CNT beam and other parameters were established. The frequency shift of the CNT-based resonators with the attached mass can be obtained from the nontrivial solution of simultaneous equations. The results demonstrated that CNT under the axial tensile load yielded higher sensitivity when used as a nanomechanical mass sensor. A higher sensitivity is more beneficial for nanomass in the order of 0.001–1.0 zg. The nonlocal parameter influenced the frequency shift of the CNT nanoresonator, indicating an increase with the attached mass, especially for larger than loaded mass of 1.0 zg.
3.2.2. Modeling and Differential Equation for GS Plate
Lei et al. [117] analyzed the vibration properties of an atomic-resolution nanomechanical mass sensor modeled by a fixed supported circular monolayer GS carrying a nanoparticle at the center. The concentrated mass attached to the circular GS induced a variation in the vibrational frequency of the GS nanoplate. The governing differential equations of GS attached concentrated mass, , can be expressed in polar coordinates as follows [117]:
where r denotes the coordinate in the radial direction, t indicates the time, w(r, t) represents the flexural deflection of the GS, h and ρ denote the thickness and mass density of GS, respectively, and (r) indicates the impulse function, which is denoted as
and
where E denotes the elastic modulus, and denotes the Poisson ratio of GS.
For GSs with clamped support and a radius of R, the boundary conditions can be stated as
The transverse vibrations of GS with a circular plate can be solved using the Laplace transform method by considering various boundary conditions. The results revealed that GSs can be employed as nanomass sensors with higher and broader ranges of sensitivities. The mass sensitivity of GSs could attain at least 10−24 g, with a logarithmic, linear relationship between the vibration frequency and the attached mass > 10−24 g.
Zhou et al. [121] reported that an attached nanoparticle could be located at an arbitrary position of the circular GS and its size effects were described according to nonlocal elasticity theory. According to the nonlocal Kirchhoff plate theory, the governing equation of circular GS carrying a nanoparticle in the polar coordinates can be expressed as
where
and the mass is attached to the circular GS at the position . The classical circular plate with a concentrated mass is recovered when the nonlocal parameter is set to zero.
Considering the clamped supported circular GS mass sensor, the boundary conditions can be stated as
where denotes the radius of the circular GS.
The frequency shift versus the mass of nanoparticle with is displayed in Figure 10 for various values of (a) the nonlocal parameter , and (b) the nondimensional location of the attached nanoparticle. The results demonstrated that the frequency shifts of the GSs increased with the attached mass. The frequency variations were evident for an attached mass heavier than 10−21 g, indicating that the mass sensitivity of the GS mass sensor could increase to at least 10−21 g. Moreover, the frequency shift of the mass sensor diminished upon considering the effect of the nonlocal parameter (Figure 10a), which was evident for larger nanoparticles. As observed from Figure 10b, the location of the nanoparticles considerably affected the frequency shift, which increased as the attached nanoparticle approached the GS center. This finding suggested that the plate center is a crucial position where the attached nanoparticle posed the strongest effect on the circular GS mass sensor.
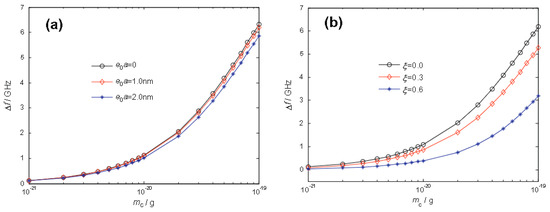
Figure 10.
The relationship between fundament frequency shifts and the attached nanoparticles for a circular GS under simply supported boundary conditions: (a) the small-scale effects; (b) the location effects. Adapted with permission from Ref. [121]. 2014 Elsevier.
For quadrilateral GSs loaded by nanoparticles in an arbitrary position , Natsuki et al. [122] proposed an analytical model to investigate the vibration behavior of DLGSs with attached nanoparticles. The governing equations describing the vibrations of the DLGS comprise two coupled differential equations and are stated as
where denotes the flexural deflections of the upper and the lower sheet, and c indicates the vdW interaction coefficient between the upper and lower layers.
The solution of the vibration frequency for the above-stated governing equations can be obtained by introducing a substitution of
where denotes the shape function of the deflections in the upper and lower GSs, whereas ω denotes the resonant frequency of the DLGS sensor.
Furthermore, the governing differential equations for the vibration of GSs were derived considering the temperature dependence, which were expressed as follows [123]:
where denotes the load induced by the temperature fluctuations, expressed as
denotes the coefficient of thermal expansion, and indicates the temperature variations.
According to the proposed nonlocal elasticity theory, the simulation results suggested that the vibration of DLGSs exhibited a terahertz frequency range, which could yield a higher sensitivity than SLGSs. Note that the variation errors in the frequency shifts of GSs were ~0.4% K−1 for varying temperatures.
3.3. Modeling and Analysis of Nanoforce Sensor Based on CNTs
The extremely small dimensions and high mechanics of CNTs enable the design of CNT-based nanoforce sensors. The detection mechanism of the CNT-based nanoforce sensor is similar to the nanomass sensors, i.e., utilizing the vibration frequency shift induced by a small force on the CNTs. However, to date, only a few studies have focused on developing nanoforce sensors using CNT-based resonators. Recently, Menacer et al. proposed a new smart nanoforce sensor based on a suspended CNT gate field-effect transistor [124,125]. The study of the proposed nanoforce sensor behavior focused primarily on the relationship between the nanotube deflection and the applied force. Accordingly, they examined the ability of CNTs for detecting the applied nanoforce by ANSYS simulator and a neural network-based model of the nanoforce sensor. The structure illustrated in Figure 11 depicts a two-dimensional view of the proposed capacitive nanoforce sensor, where two materials, silicon oxide and air gap, were used as gate dielectric of the device. The function of the applied nanoforce could be described by the evolution of the drain current characteristics while examining the influence of the capacity variations of the insulating gate on the drain current. As reported, the proposed device with an extremely small diameter of the CNTs exhibited adequate sensitivity depending on the CNT dimensions.
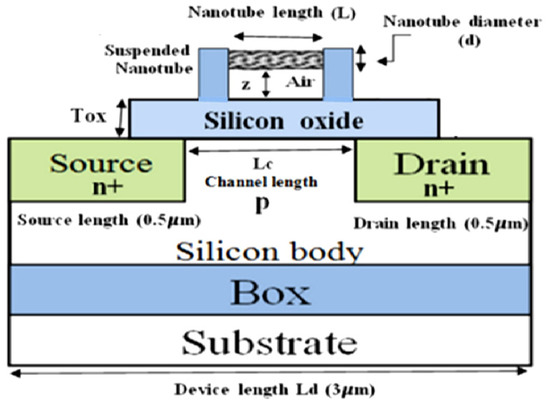
Figure 11.
The cross-section view of the proposed capacitive nanoforce sensor. Adapted with permission from Ref. [124]. 2018 Elsevier.
Natsuki et al. investigated the CNT-based nanoforce sensor to analyze the buckling stability [126] and the vibration property [67,127]. To obtain high stability and resolution, the authors proposed that the structure of CNT-based resonators was composed of a DWCNT tip with a shorter outer wall [67]. Furthermore, an analytical procedure based on the Euler–Bernoulli beam model was employed to investigate the buckling instability of the DWCNT probe with varying lengths of its inner and outer tubes. The AFM probes designed by the DWCNT tip exhibited a high buckling stability, which was important for reliably detecting the loading force. The results demonstrated that the buckling stress of the DWCNT tip was ~9 GPa, which was ~3.5 times larger than that of the SWCNT [126]. The proposed analytical model of the CNT tips exhibited a DWCNT structure with varying inner and outer lengths denoted as and , respectively. According to the Bernoulli–Euler beam theory, the governing differential equations of the vibration for the inner and outer nanotubes were described by the following coupled equations [67]:
where the subscripts 1 and 2 denote the quantities associated with the inner and outer nanotubes, respectively, represent the transverse deflections of the inner and outer nanotubes, respectively, denotes the axial load acting on the inner nanotube causing the axial buckling behavior of the DWCNTs, and denotes the vdW interaction coefficient between the inner and outer nanotubes.
For the exposed portion of the inner CNT , the governing differential equation of the motion can be expressed as
where represents the transverse deflection of the inner protruding nanotube.
Furthermore, Natsuki et al. [127] proposed an analytical model considering CNT-based resonators with elastic clamping. SWCNT was considered the probe of the resonator of nanoforce sensor. The elastic-supported SWCNT was partially embedded in a medium with a length of and an exposed CNT length of (Figure 2b). The interaction between the clamping medium and CNTs was described as Whitney–Riley model characterized by spring constants and expressed as
where and denote the elastic modulus and Poisson’s ratio of the elastic medium, respectively; and represent the radial of CNT and the length of the clamped part, respectively.
According to the Euler–Bernoulli beam theory, the governing differential equation for the vibration of the CNT probe with elastic support for detecting an unknown external compressive force can be expressed as follows [127]:
where represents the flexural deflections of the embedded and the exposed segment of the CNT probe.
Upon solving the aforementioned differential equations and using the supported boundary conditions, a set of simultaneous equations was obtained. Next, according to the nontrivial solution of the obtained simultaneous equations, the frequency variations with respect to the external compressive force could be simulated and predicted using a mathematical technique. The results suggested that the CNT could be effectively used as nanoforce sensor because the vibration frequency of CNT was highly sensitive to an axial force. As observed, the stiffness of the clamping medium is crucial for the measurement accuracy of the nanoforce sensor, especially for low stiffness of the clamping medium and small clamping length [127]. As depicted in Figure 12, the influence of the length-to-diameter ratio on the fundamental natural frequency was portrayed for the DWCNT tips subjected to varying nanoforces. The detected force varied with the CNT dimensions, such as the diameter and length, thereby signifying that a high force sensitivity could be obtained by tuning the CNT lengths according to the rate of the frequency variations.
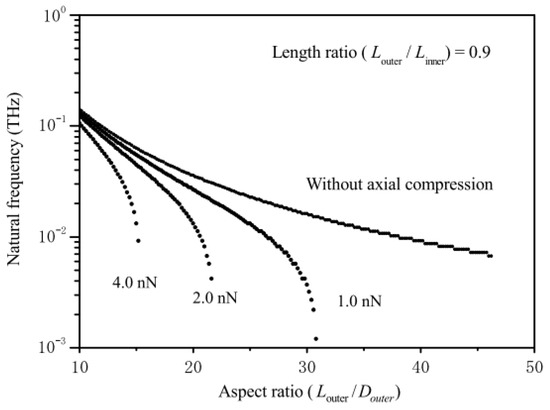
Figure 12.
Variation of the natural frequency of cantilevered DWCNTs as the ratio of the outer tube length vs. diameter for different compressive loads. Adapted with permission from Ref. [67]. 2013 Springer-Verlag.
4. Concluding Remarks
Carbon-based nanomaterials exhibit exceptional mechanical behaviors, such as high elastic modulus and strength, along with terahertz frequency vibration, thereby enabling a wide range of applications in the industry of nanotechnology. CNTs/GSs are the fundamental building blocks of diverse nanosensing materials. In this review, we characterized the mechanical properties of CNTs/GSs and the detection mechanism of CNT/GS-based nanosensors. This paper reviews recent studies on CNTs/GSs used as nanomechanical resonators, primarily based on continuum mechanics approaches. However, the continuum mechanics theory considers a continuous limit of lattice models for nanostructured bodies. In the analytical modeling, the nonlocal continuum mechanics theory has been developed for the nanostructured materials because of the small-scale effect, providing a reliable method to model nanoresonators. In particular, we reviewed the approaches for modeling the mechanical behavior, vibration frequency, and buckling stability of CNTs/GSs using various theoretical methods. Therefore, it is crucial to understand the unique mechanical behaviors of CNTs/GSs, as they considerably affect the performance of CNT-based resonators or nanodevices.
In this review of nanomaterial-based sensors, the major findings indicate that CNT/GS resonators can provide high sensitivity because of their small mass and high stiffness. For measuring the frequency shifts of CNT/GS resonators, the nanobalance technique can perform mass or force detection with nanoscale precision. However, owing to a lack of an efficient and accurate characterization technique, quantitative experimental studies are not feasible for controlling the extremely small size of nanomaterials. Currently, the experimental research on CNT/GS-based sensors and related technology is in its infancy; thus, experimental efforts are required to explore the feasibility of applications of CNTs/GS nanoresonators. Their sensing performances are predicted and evaluated primarily using theoretical models and analytical approaches. With the development of nanotechnology, new methods and approaches should be well established to reduce uncertainty in measurements. Therefore, the high-performance of CNT/GS-based sensors and nanoelectronics is expected to be realized in the near future.
Author Contributions
T.N.: supervision, and writing—review and editing; J.N.: investigation, and writing—review and editing. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by JSPS KAKENHI (Grant Number JP23H01299), and in part by the program of the Fujian Minjiang Chair Professor Program (CN) [No2022(4)].
Data Availability Statement
No new data were created in this study. Data sharing is not applicable to this article.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Ruoff, R.S.; Qian, D.; Liu, W.K. Mechanical properties of carbon nanotubes: Theoretical predictions and experimental measurements. Comptes Rendus Phys. 2003, 4, 993–1008. [Google Scholar] [CrossRef]
- Maiti, D.; Tong, X.M.; Mou, X.Z.; Yang, K. Carbon-based nanomaterials for biomedical applications: A recent study. Front. Pharmacol. 2019, 9, 1401. [Google Scholar] [CrossRef] [PubMed]
- Tomioka, Y.; Natsuki, T.; Shi, J.X.; Lei, X.W. Theoretical evaluation of impact characteristics of wavy graphene sheets with disclinations formed by origami and Kirigami. Nanomaterials 2022, 12, 436. [Google Scholar] [CrossRef]
- Qin, Y.; Zhang, Y.; Qi, N.; Wang, Q.Z.; Zhang, X.J.; Li, Y. Preparation of graphene aerogel with high mechanical stability and microwave absorption ability via combining surface support of metallic-CNTs and interfacial cross-linking by magnetic nanoparticles. ACS Appl. Mater. Interfaces 2019, 11, 10409–10417. [Google Scholar] [CrossRef]
- Hung, N.T.; Van Truong, D.; Van Thanh, V.; Saito, R. Intrinsic strength and failure behaviors of ultra-small single-walled carbon nanotubes. Comput. Mater. Sci. 2016, 114, 167–171. [Google Scholar] [CrossRef]
- Shokrieh, M.M.; Rafiee, R. Prediction of Young’s modulus of graphene sheets and carbon nanotubes using nanoscale continuum mechanics approach. Mater. Des. 2010, 31, 790–795. [Google Scholar] [CrossRef]
- Castillo-Henríquez, L.; Brenes-Acuña, M.; Castro-Rojas, A.; Cordero-Salmerón, R.; Lopretti-Correa, M.; Vega-Baudrit, J.R. Biosensors for the detection of bacterial and viral clinical pathogens. Sensors 2020, 20, 6926. [Google Scholar] [CrossRef]
- Barsan, M.M.; Ghica, M.E.; Brett, C.M.A. Electrochemical sensors and biosensors based on redox polymer/carbon nanotube modified electrodes: A review. Anal. Cim. Acta 2015, 881, 1–23. [Google Scholar] [CrossRef]
- Yuan, W.J.; Shi, G.Q. Graphene-based gas sensors. J. Mater. Chem. A 2013, 1, 10078–10091. [Google Scholar] [CrossRef]
- Loghin, F.; Abdellah, A.; Falco, A.; Becherer, M.; Lugli, P.; Rivadeneyra, A. Time stability of carbon nanotube gas sensors. Measurement 2019, 136, 323–325. [Google Scholar] [CrossRef]
- Moser, J.; Guttinger, J.; Eichler, A.; Esplandiu, M.J.; Liu, D.E.; Dykman, M.I.; Bachtold, A. Ultrasensitive force detection with a nanotube mechanical resonator. Nat. Nanotechnol. 2013, 8, 493–496. [Google Scholar] [CrossRef] [PubMed]
- Singh, K.; Sharma, S.; Singh, B.; Gupta, M.; Tripathi, C.C. Fabrication of graphene, graphite and multi wall carbon nano tube based thin films and their potential application as strain sensor. Thin Solid Film. 2022, 761, 139540. [Google Scholar] [CrossRef]
- Mirfakhrai, T.; Oh, J.; Kozlov, M.E.; Fang, S.L.; Zhang, M.; Baughman, R.H.; Madden, J.D.W. Mechanoelectrical force sensors using twisted yarns of carbon nanotubes. IEEE ASME Trans. Mechatron. 2011, 16, 90–97. [Google Scholar] [CrossRef]
- Wang, J.; Musameh, M. Carbon nanotube screen-printed electrochemical sensors. Analyst 2004, 129, 1–2. [Google Scholar] [CrossRef] [PubMed]
- Chen, K.; Gao, W.; Emaminejad, S.; Kiriya, D.; Ota, H.; Nyein, H.Y.Y.; Takei, K.; Javey, A. Printed carbon nanotube electronics and sensor systems. Adv. Mater. 2016, 28, 4397–4414. [Google Scholar] [CrossRef]
- Kauth, C.; Pastre, M.; Kayal, M. A novel approach to high-speed high-resolution on-chip mass sensing. Microelectron. J. 2014, 45, 1648–1655. [Google Scholar] [CrossRef]
- Mirakhory, M.; Khatibi, M.M.; Sadeghzadeh, S. Nanoparticle mass detection by single-layer triangular graphene sheets, the extraordinary geometry for detection of nanoparticle. J. Nanopart. Res. 2020, 22, 159. [Google Scholar] [CrossRef]
- Crica, L.E.; Dennison, T.J.; Guerini, E.A.; Kostarelos, K. A method for the measurement of mass and number of graphene oxide sheets in suspension based on non-spherical approximations. 2D Mater. 2021, 8, 035044. [Google Scholar] [CrossRef]
- Iijima, S. Helical microtubles of graphitic carbon. Nature 1991, 354, 56–58. [Google Scholar] [CrossRef]
- Qian, D.; Wagner, G.J.; Liu, W.K.; Yu, M.F.; Ruoff, R.S. Mechanics of carbon nanotubes. Appl. Mech. Rev. 2002, 55, 495–533. [Google Scholar] [CrossRef]
- Lau, K.T.; Hui, D. The revolutionary creation of new advanced materials: Carbon nanotube composites. Compos. Part B 2002, 33, 263–277. [Google Scholar] [CrossRef]
- Li, Y.; Wang, S.; He, E.; Wang, Q. The effect of sliding velocity on the tribological properties of polymer/carbon nanotube composites. Carbon 2016, 106, 106–109. [Google Scholar] [CrossRef]
- Sun, R.; Li, L.; Feng, C.; Kitipornchai, S.; Yang, J. Tensile behavior of polymer nanocomposite reinforced with graphene containing defects. Eur. Polym. J. 2018, 98, 475–482. [Google Scholar] [CrossRef]
- Natsuki, T.; Endo, M. Stress simulation of carbon nanotubes in tension and compression. Carbon 2004, 42, 2137–2151. [Google Scholar] [CrossRef]
- Qian, D.; Dickey, E.C.; Andrews, R.; Rantell, T. Load transfer and deformation mechanisms in carbon nanotube-polystyrene composites. Appl. Phys. Lett. 2000, 76, 2868–2870. [Google Scholar] [CrossRef]
- Schadler, L.S.; Giannaris, S.C.; Ajayan, P.M. Load transfer in carbon nanotube epoxy composites. Appl. Phys. Lett. 1998, 73, 3842–3844. [Google Scholar] [CrossRef]
- Wanger, H.D.; Lourie, O.; Feldman, Y.; Tenne, R. Stress-induced fragmentation of multiwall carbon nanotubes in a polymer matrix. Appl. Phys. Lett. 1998, 72, 188–190. [Google Scholar]
- Treacy, M.M.J.; Ebbesen, T.W.; Gibson, J.M. Exceptionally high young’s modulus observed for individual nanotubes. Nature 1996, 381, 678–680. [Google Scholar] [CrossRef]
- Wong, E.W.; Sheehan, P.E.; Lieber, C.M. Nanobeam mechanics: Elasticity, strength, and toughness of nanorods and nanotubes. Science 1997, 277, 1971–1975. [Google Scholar] [CrossRef]
- Krishnan, A.; Dujardin, E.; Ebbesen, T.W.; Yianilos, P.N.; Treacy, M.M.J. Young’s modulus of single-walled nanotubes. Phys. Rev. B 1998, 58, 14013–14019. [Google Scholar] [CrossRef]
- Natsuki, T.; Natsuki, J. Measurement of the elastic modulus of nanowires based on resonant frequency and boundary condition effects. Phys. E Low Dimens. Syst. Nanostruct. 2019, 105, 207–211. [Google Scholar] [CrossRef]
- Zhang, Y.Q.; Liu, G.R.; Xie, X.Y. Free transverse vibration of double-walled carbon nanotubes using a theory of nonlocal elasticity. Phys. Rev. B 2005, 71, 195404. [Google Scholar] [CrossRef]
- Yu, M.F.; Lourie, O.; Dyer, M.J.; Moloni, K.; Kelly, T.F.; Ruoff, R.S. Strength and breaking mechanism of multi-walled carbon nanotubes under tensile load. Science 2000, 287, 637–640. [Google Scholar] [CrossRef] [PubMed]
- Jiang, H.; Jiang, L.; Posner, J.D.; Vogt, B.D. Atomistic-based continuum constitutive relation for microtubules: Elastic modulus prediction. Comput. Mech. 2008, 42, 607–618. [Google Scholar] [CrossRef]
- Natsuki, T.; Tantrakarn, K.; Endo, M. Prediction of elastic properties for single-walled carbon nanotubes. Carbon 2004, 42, 39–45. [Google Scholar] [CrossRef]
- Lei, X.; Natsuki, T.; Shi, J.; Ni, Q.Q. Analysis of carbon nanotubes on the mechanical properties at atomic scale. J. Nanomater. 2011, 2011, 805313. [Google Scholar] [CrossRef]
- Natsuki, T.; Endo, M. Structural dependence of nonlinear elastic properties for carbon nanotube using a continuum analysis. Appl. Phys. A 2005, 80, 1463–1468. [Google Scholar] [CrossRef]
- Jacob, M.; Werni Shaker, A. Meguid, Atomistic-based continuum modeling of the nonlinear behavior of carbon nanotubes. Acta Mech. 2010, 212, 167–179. [Google Scholar]
- Al-Kharusi, M.S.M.; Alzebdeh, K.; Pervez, T. An atomistic-based continuum modeling for evaluation of effective elastic properties of single-walled carbon nanotubes. J. Nanomater. 2016, 2016, 8641954. [Google Scholar] [CrossRef]
- Barnard, A.W.; Zhang, M.; Wiederhecker, G.S.; Lipson, M.; McEuen, P.L. Real-time vibrations of a carbon nanotube. Nature 2019, 566, 89–93. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z.; Li, T. Ultrafast nano-oscillators based on interlayer-bridged carbon nanoscrolls. Nanoscale Res. Lett. 2011, 6, 470. [Google Scholar] [CrossRef]
- Willick, K.; Tang, X.; Baugh, J. Probing the non-linear transient response of a carbon nanotube mechanical oscillator. Appl. Phys. Lett. 2017, 111, 223108. [Google Scholar] [CrossRef]
- Sazonova, V.; Yaish, Y.; Ustenel, H.; Roundy, D.; Arias, T.A.; McEuen, P.A. Tunable carbon nanotube electromechanical oscillator. Nature 2004, 431, 284–287. [Google Scholar] [CrossRef] [PubMed]
- Hu, W.; Song, M.; Yin, T.; Wei, B.; Deng, Z. Energy dissipation of damping cantilevered single-walled carbon nanotube oscillator. Nonlinear Dyn. 2018, 91, 767–776. [Google Scholar] [CrossRef]
- Elishakoff, I.; Pentaras, D. Natural frequencies of carbon nanotubes based on simplified Bresse-Timoshenko theory. J. Comp. Theor. Nanosci. 2009, 6, 1527–1531. [Google Scholar] [CrossRef]
- Hutchinson, J.R. Shear coefficients for Timoshenko beam theory. J. Appl. Mech. (ASME) 2001, 68, 87–92. [Google Scholar] [CrossRef]
- Yoon, J.; Ru, C.Q.; Mioduchowski, A. Timoshenko-beam effects on transverse wave propagation in carbon nanotubes. Compos. Part B Eng. 2004, 35, 87–93. [Google Scholar] [CrossRef]
- Eringen, A.C. Nonlocal polar elastic continua. Int. J. Eng. Sci. 1972, 10, 1–16. [Google Scholar] [CrossRef]
- Eringen, A.C. Interaction of a dislocation with a crack. J. Appl. Phys. 1983, 54, 6811. [Google Scholar] [CrossRef]
- Noureddine, M.; Mohamed, L.; Al-Douri, Y.; Djillali, B.; Mokhtar, B. Effect of chiral angle and chiral index on the vibration of single-walled carbon nanotubes using nonlocal Euler-Bernoulli beam model. Comput. Condens. Matter 2002, 30, 300655. [Google Scholar] [CrossRef]
- Wang, Q.; Zhou, G.Y.; Lin, K.C. Scale effect on wave propagation of double-walled carbon nanotubes. Int. J. Solids Struct. 2006, 43, 6071–6084. [Google Scholar] [CrossRef]
- Lu, P.; Lee, H.P.; Lu, C.; Zhang, P.Q. Application of nonlocal beam models for carbon nanotubes. Int. J. Solids Struct. 2007, 44, 2589–5300. [Google Scholar] [CrossRef]
- Lei, X.; Natsuki, T.; Shi, J. Ni, Surface effects on the vibrational frequency of double-walled carbon nanotubes using the nonlocal Timoshenko beam model. Compos. Part B Eng. 2012, 43, 64–69. [Google Scholar] [CrossRef]
- Boumia, L.; Zidour, M.; Benzair, A.; Tounsi, A. A Timoshenko beam model for vibration analysis of chiral single-walled carbon nanotubes. Phys. E Low Dimens. Syst. Nanostruct. 2014, 59, 186–191. [Google Scholar] [CrossRef]
- Natsuki, T.; Ni, Q.Q.; Endo, M. Analysis of the vibration characteristics of double-walled carbon nanotubes. Carbon 2008, 46, 1570–1573. [Google Scholar] [CrossRef]
- de Borbon, F.; Ambrosini, D. On the influence of van der Waals coefficient on the transverse vibration of double walled carbon nanotubes. Comput. Mater. Sci. 2012, 65, 504–508. [Google Scholar] [CrossRef]
- Girifalco, L.A.; Lad, R.A. Energy of cohesion, compressibility, and the potential energy functions of the graphite system. J. Chem. Phys. 1956, 25, 693. [Google Scholar] [CrossRef]
- Ru, C.Q. Column buckling of multiwalled carbon nanotubes with interlayer radial displacements. Phys. Rev. B 2000, 62, 16962. [Google Scholar] [CrossRef]
- Saito, R.; Matsuo, R.; Kimura, T.; Dresselhaus, G.; Dresselhaus, M.S. Anomalous potential barrier of double-wall carbon nanotube. Chem. Phys. Lett. 2001, 348, 187–193. [Google Scholar] [CrossRef]
- He, X.Q.; Kitipornchai, S.; Liew, K.M. Buckling analysis of multi-walled carbon nanotubes: A continuum model accounting for van der Waals interaction. J. Mech. Phys. Solids 2005, 53, 303–326. [Google Scholar] [CrossRef]
- Kumar, D.; Heinrich, C.; Waasa, A.M. Buckling analysis of carbon nanotubes modeled using nonlocal continuum theories. J. Appl. Phys. 2008, 103, 073521. [Google Scholar] [CrossRef]
- Wang, Q.; Shindo, Y. Nonlocal continuum models for carbon nanotubes subjected to static loading. J. Mech. Mater. Struct. 2006, 1, 663–680. [Google Scholar] [CrossRef]
- Narendar, S.; Gopalakrishnan, S. Critical buckling temperature of single-walled carbon nanotubes embedded in a one-parameter elastic medium based on nonlocal continuum mechanics. Phys. E Low Dimens. Syst. Nanostruct. 2011, 43, 1185–1191. [Google Scholar] [CrossRef]
- Hosseini-Hashemi, S.h.; Ilkhani, M.R. Nonlocal modeling for dynamic stability of spinning nanotube under axial load. Meccanica 2017, 52, 1107–1121. [Google Scholar] [CrossRef]
- Heireche, H.; Tounsi, A.; Benzair, A.; Mechab, I. Sound wave propagation in single-walled carbon nanotubes with initial axial stress. J. Appl. Phys. 2008, 104, 014301. [Google Scholar] [CrossRef]
- Murmu, T.; Pradhan, S.C. Buckling analysis of a single-walled carbon nanotube embedded in an elastic medium based on nonlocal elasticity and Timoshenko beam theory and using DQM. Phys. E Low Dimens. Syst. Nanostruct. 2009, 41, 1232–1239. [Google Scholar] [CrossRef]
- Natsuki, T.; Ni, Q.Q.; Elishakoff, I. Influence of the axial compression on the natural frequency of AFM probes using double-walled carbon nanotubes with different wall lengths. Appl. Phys. A 2013, 110, 1–7. [Google Scholar] [CrossRef]
- Elishakoff, I.; Bucas, S. Buckling of a clamped-free double-walled carbon nanotube by the Bubnov-Galerkin method. J. Appl. Mech. 2013, 80, 011004. [Google Scholar] [CrossRef]
- Novoselov, K.S.; Geim, A.K.; Morozov, S.V.; Jiang, D.; Zhang, Y.; Dubonos, S.V.; Grigorieva, I.V.; Firsov, A.A. Electric field effect in atomically thin carbon films. Science 2004, 306, 666–669. [Google Scholar] [CrossRef]
- Wan, S.J.; Li, Y.C.; Mu, J.K.; Aliev, A.E.; Fang, S.L.; Kotov, N.A.; Jiang, L.; Cheng, Q.F.; Baughman, R.H. Sequentially bridged graphene sheets with high strength, toughness, and electrical conductivity. Proc. Natl. Acad. Sci. USA 2018, 115, 5359–5364. [Google Scholar] [CrossRef]
- Cai, C.L.; Wang, T.; Qu, G.W.; Feng, Z.Q. High thermal conductivity of graphene and structure defects: Prospects for thermal applications in graphene sheets. Chin. Chem. Lett. 2021, 32, 1293–1298. [Google Scholar] [CrossRef]
- Sierra-Chi, C.A.; Aguilar-Bolados, H.; Lopez-Manchado, M.A.; Verdejo, R.; Cauich-Rodriguez, J.V.; Aviles, F. Flexural electromechanical properties of multilayer graphene sheet /carbon nanotube/vinyl ester hybrid nanocomposites. Compos. Sci. Technol. 2020, 194, 108164. [Google Scholar] [CrossRef]
- Tang, L.H.; Wang, Y.; Li, Y.M.; Feng, H.B.; Lu, J.; Li, J.H. Preparation, structure, and electrochemical properties of reduced graphene sheet films. Adv. Funct. Mater. 2009, 19, 2782–2789. [Google Scholar] [CrossRef]
- Garcia-Sanchez, D.; van der Zande, A.M.; San Paulo, A.; Lassagne, B.; McEuen, P.L.; Bachtold, A. Imaging mechanical vibrations in suspended graphene sheets. Nano Lett. 2008, 8, 1399–1403. [Google Scholar] [CrossRef] [PubMed]
- Frank, I.W.; Tanenbaum, D.M.; van der Zande, A.M.; McEuen, P.L. Mechanical properties of suspended graphene sheets. J. Vac. Sci. Technol. B 2007, 25, 2558–2561. [Google Scholar] [CrossRef]
- Lee, C.; Wei, X.D.; Kysar, G.W.; Hone, J. Measurement of the elastic properties and intrinsic strength of monolayer graphene. Science 2008, 321, 385–388. [Google Scholar] [CrossRef]
- Gao, Y.W.; Hao, P. Mechanical properties of monolayer graphene under tensile and compressive loading. Phys. E Low Dimens. Syst. Nanostruct. 2009, 41, 1561–1566. [Google Scholar] [CrossRef]
- Palaiologos, A.; Grigoriadis., K.; Zavos, A.; Nikolakopoulo, P.G. A dynamic and tribological simulation of a monolayer graphene sheet for a carbon atom-graphene contact. Lubr. Sci. 2019, 31, 194–209. [Google Scholar] [CrossRef]
- Shi, J.X.; Natsuki, T.; Lei, X.W.; Ni, Q.Q. Equivalent Young’s modulus and thickness of graphene sheets for the continuum mechanical models. Appl. Phys. Lett. 2014, 104, 223101. [Google Scholar] [CrossRef]
- Natsuki, T.; Natsuki, J. Prediction of mechanical properties for hexagonal boron nitride nanosheets using molecular mechanics model. Appl. Phys. A 2017, 123, 283. [Google Scholar] [CrossRef]
- Madani, S.H.; Sabour, M.H.; Fadaee, M. Molecular dynamics simulation of vibrational behavior of annular graphene sheet: Identification of nonlocal parameter. J. Mol. Graph. Model. 2018, 79, 264–272. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J. Mechanical deformations of carbon nanorings: A study by molecular dynamics and nonlocal continuum mechanics. Meccanica 2019, 54, 2281–2293. [Google Scholar] [CrossRef]
- Sahmani, S.; Fattah, A.M. Development an efficient calibrated nonlocal plate model for nonlinear axial instability of zirconia nanosheets using molecular dynamics simulation. J. Mol. Graph. Model. 2017, 75, 20–31. [Google Scholar] [CrossRef]
- Pour, M.A.; Golmakani1, M.E.; Malikan, M. Thermal buckling analysis of circular bilayer graphene sheets resting on an elastic matrix based on nonlocal continuum mechanics. J. Appl. Comput. Mech. 2021, 7, 1862–1877. [Google Scholar]
- Ghannadpour, S.A.M.; Moradi, F.; Tornabene, F. Exact analytical solution to the problem of relative post-buckling stiffness of thin nonlocal graphene sheet. Thin Wall. Struct. 2020, 151, 106712. [Google Scholar] [CrossRef]
- Wu, C.P.; Li, W.C. Asymptotic nonlocal elasticity theory for the buckling analysis of embedded single-layered nanoplates/graphene sheets under biaxial compression. Phys. E Low Dimens. Syst. Nanostruct. 2017, 89, 160–169. [Google Scholar] [CrossRef]
- Shahsavari, D.; Behrouz, K.; Li, L. Damped vibration of a graphene sheet using a higher-order nonlocal strain-gradient Kirchhoff plate model. Comptes Rendus Mécanique 2018, 346, 1216–1232. [Google Scholar] [CrossRef]
- Shen, L.; Shen, H.S.; Zhang, C.L. Nonlocal plate model for nonlinear vibration of single layer graphene sheets. Comput. Mater. Sci. 2010, 48, 680–685. [Google Scholar] [CrossRef]
- Ansari, R.; Sahmani, S.; Arash, B. Nonlocal plate model for free vibrations of single-layered graphene sheets. Phys. Lett. A 2010, 375, 53–62. [Google Scholar] [CrossRef]
- Pradhan, S.C.; Phadika, J.K. Small scale effect on vibration of embedded multilayered graphene sheets based on nonlocal continuum model. Phys. Lett. A 2009, 373, 1062–1069. [Google Scholar] [CrossRef]
- Wang, K.F.; Wang, B.L.; ·Zeng, S. Small scale effect on the pull-in instability and vibration of graphene sheets. Microsyst. Technol. 2017, 23, 2033–2041. [Google Scholar] [CrossRef]
- Pradhan, S.C.; Murmu, T. Small scale effect on the buckling analysis of single-layered graphene sheet embedded in an elastic medium based on nonlocal plate theory. Phys. E Low Dimens. Syst. Nanostruct. 2010, 42, 1293–1301. [Google Scholar] [CrossRef]
- Murmu, T.; McCarthy, M.A.; Adhikari, S. In-plane magnetic field affected transverse vibration of embedded single-layer graphene sheets using equivalent nonlocal elasticity approach. Compos. Struct. 2013, 96, 57–63. [Google Scholar] [CrossRef]
- Narendar, S.; Gopalakrishnan, S. Strong nonlocalization induced by small scale parameter on terahertzflexural wave dispersion characteristics of a monolayer graphene. Phys. E Low Dimens. Syst. Nanostruct. 2010, 43, 423–430. [Google Scholar] [CrossRef]
- Golmakani, M.E.; Sadraee Far, M.N. Buckling analysis of biaxially compressed double-layered graphene sheets with various boundary conditions based on nonlocal elasticity theory. Microsyst. Technol. 2017, 23, 2145–2161. [Google Scholar] [CrossRef]
- He, X.Q.; Wang, J.B.; Liu, B.; Liew, K.M. Analysis of nonlinear forced vibration of multi-layered graphene sheets. Comput. Mater. Sci. 2012, 61, 194–199. [Google Scholar] [CrossRef]
- Kitipornchai, S.; He, X.Q.; Liew, K.M. Continuum model for the vibration of multilayered graphene sheets. Phys. Rev. B 2005, 72, 075443. [Google Scholar] [CrossRef]
- Jensen, K.; Kim, K.; Zettl, A. An atomic-resolution nanomechanical mass sensor. Nat. Nanotechnol. 2008, 3, 533–537. [Google Scholar] [CrossRef] [PubMed]
- Aydogdu, M.; Filiz, S. Modeling carbon nanotube-based mass sensors using axial vibration and nonlocal elasticity. Phys. E Low Dimens. Syst. Nanostruct. 2011, 43, 1229–1234. [Google Scholar] [CrossRef]
- Lassagne, B.; Bachtold, A. Carbon nanotube electromechanical resonator for ultrasensitive mass/force sensing. Comptes Rendus Phys. 2010, 11, 355–361. [Google Scholar] [CrossRef]
- Natsuki, T. Carbon nanotube-based nanomechanical sensor: Theoretical analysis of mechanical and vibrational properties. Electronics 2017, 6, 56. [Google Scholar] [CrossRef]
- Shi, J.X.; Lei, X.W.; Natsuki, T. Review on carbon nanomaterials-based nano-mass and nano-force sensors by theoretical analysis of vibration behavior. Sensors 2021, 21, 1907. [Google Scholar] [CrossRef]
- Lassagne, B.; Garcia-Sanchez, D.; Aguasca, A.; Bachtold, A. Ultrasensitive mass sensing with a nanotube electromechanical resonator. Nano Lett. 2008, 8, 3735–3738. [Google Scholar] [CrossRef] [PubMed]
- Li, J.J.; Zhu, K.D. Weighing a single atom using a coupled plasmon-carbon nanotube system. Sci. Technol. Adv. Mater. 2012, 13, 1–6. [Google Scholar] [CrossRef] [PubMed]
- Bunch, J.S.; van der Zande, A.M.; Verbridge, S.S.; Frank, I.W.; Tanenbaum, D.M.; Parpia, J.M.; Craighead, H.G.; McEuen, P.L. Electromechanical resonators from graphene sheets. Science 2007, 315, 490–493. [Google Scholar] [CrossRef] [PubMed]
- Sharma, A.; Varshney, U.; Lu, Y. Electronic applications of graphene mechanical resonators. IET Circuits Devices Syst. 2015, 9, 413–419. [Google Scholar] [CrossRef]
- Li, C.; Chou, T.W. Mass detection using carbon nanotube-based nanomechanical resonators. Appl. Phys. Lett. 2004, 84, 5246–5248. [Google Scholar] [CrossRef]
- Lee, H.L.; Hsu, J.H.; Chang, W.J. Frequency shift of carbon-nanotube-based mass sensor using nonlocal elasticity theory. Nanoscale Res. Lett. 2010, 5, 1774–1778. [Google Scholar] [CrossRef] [PubMed]
- Shen, Z.B.; Deng, B.; Li, X.F.; Tang, G.J. Vibration of double-walled carbon nanotube-based mass sensor via nonlocal Timoshenko beam theory. J. Nanotechnol. Eng. 2012, 2, 031003. [Google Scholar] [CrossRef]
- Shen, Z.B.; Sheng, L.P.; Li, X.F.; Tang, G.J. Nonlocal timoshenko beam theory for vibration of carbon nanotube-based biosensor. Phys. E Low Dimens. Syst. Nanostruct. 2012, 44, 1169–1175. [Google Scholar] [CrossRef]
- Mehrez, S.; Karati, S.A.; DolatAbadi, P.T.; Shah, S.N.R.; Azam, S.; Khorami, M.; Assilzadeh, H. Nonlocal dynamic modeling of mass sensors consisting of graphene sheets based on strain gradient theory. Adv. Nano Res. 2020, 9, 221–235. [Google Scholar]
- Jiang, R.W.; Shen, Z.B.; Tang, G.J. Vibration analysis of a single-layered graphene sheet-based mass sensor using the Galerkin strip distributed transfer function method. Acta Mech. 2016, 227, 2899–2910. [Google Scholar] [CrossRef]
- Li, C.; Chou, T.-W. A structural mechanics approach for the analysis of carbon nanotubes. Int. J. Solids Struct. 2003, 40, 2487–2499. [Google Scholar] [CrossRef]
- Natsuki, T.; Matsuyama, N.; Shi, J.X.; Ni, Q.Q. Vibration analysis of nanomechanical mass sensor using carbon nanotubes under axial tensile load. Appl. Phys. A 2014, 116, 1001–1007. [Google Scholar] [CrossRef]
- Natsuki, T.; Shi, J.X.; Ni, Q.Q. Vibration analysis of nanomechanical mass sensor using double-layered graphene sheets resonators. J. Appl. Phys. 2013, 114, 094307. [Google Scholar] [CrossRef]
- Shi, J.; Natsuki, T.; Lei, X.W.; Ni, Q.Q. Buckling instability of carbon nanotube Atomic Force Microscope probe clamped in an elastic medium. J. Nanotechnol. Eng. Med. 2012, 3, 02903. [Google Scholar] [CrossRef]
- Lei, X.W.; Natsuki, T.; Shi, J.X.; Ni, Q.Q. An atomic-resolution nanomechanical mass sensor based on circular monolayer graphene sheet: Theoretical analysis of vibrational properties. J. Appl. Phys. 2013, 113, 154313. [Google Scholar] [CrossRef]
- Shen, Z.B.; Tang, H.L.; Li, D.K.; Tang, G.J. Vibration of single-layered graphene sheet-based nanomechanical sensor via nonlocal Kirchhoff plate theory. Comput. Mater. Sci. 2012, 61, 200–205. [Google Scholar] [CrossRef]
- Patel, A.M.; Joshi, A.M. Characterizing the nonlinear behaviour of double walled carbon nanotube based nano mass sensor. Microsyst. Technol. 2017, 23, 1879–1889. [Google Scholar] [CrossRef]
- Natsuki, T.; Matsuyama, N.; Ni, Q.Q. Vibration analysis of carbon nanotube-based resonator using nonlocal elasticity theory. Appl. Phys. A 2015, 120, 1309–1313. [Google Scholar] [CrossRef]
- Zhou, S.M.; Sheng, L.P.; Shen, Z.B. Transverse vibration of circular graphene sheet-based mass sensor via nonlocal Kirchhoff plate theory. Comput. Mater. Sci. 2014, 86, 73–78. [Google Scholar] [CrossRef]
- Natsuki, T. Theoretical analysis of vibration frequency of graphene sheet used as nanomechanical mass sensor. Electronics 2015, 4, 723–738. [Google Scholar] [CrossRef]
- Natsuki, T.; Yiwada, A.; Natsuki, J. Influence of temperature on vibrational frequency of graphene sheet used as nano-scale sensing. C-J. Carbon Res. 2017, 3, 4. [Google Scholar] [CrossRef]
- Menacer, F.; Dibi, Z.; Kadri, A.; Djeffal, F. A new smart nanoforce sensor based on suspended gate SOIMOSFET using carbon nanotube. Measurement 2018, 125, 232–242. [Google Scholar] [CrossRef]
- Menacer, F.; Kadri, A.; Dibi, Z. Modeling of a smart nano force sensor using finite elements and neural networks. Int. J. Autom. Comput. 2020, 17, 279–291. [Google Scholar] [CrossRef]
- Natsuki, T.; Ni, Q.Q.; Endo, M. Stability analysis of double-walled carbon nanotubes as AFM probes based on a continuum model. Carbon 2011, 49, 2532–2537. [Google Scholar] [CrossRef]
- Natsuki, T.; Urakam, K. Analysis of vibration frequency of carbon nanotubes used as nano-force sensors considering clamped boundary condition. Electronics 2019, 8, 1082. [Google Scholar] [CrossRef]












Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).