A Novel Gesture-Based Language for Underwater Human–Robot Interaction

 , , , , , , and
, , , , , , and
Abstract
:1. Introduction
2. State of the Art
3. A Gesture-Based Language for Underwater Environments: The Caddian Language
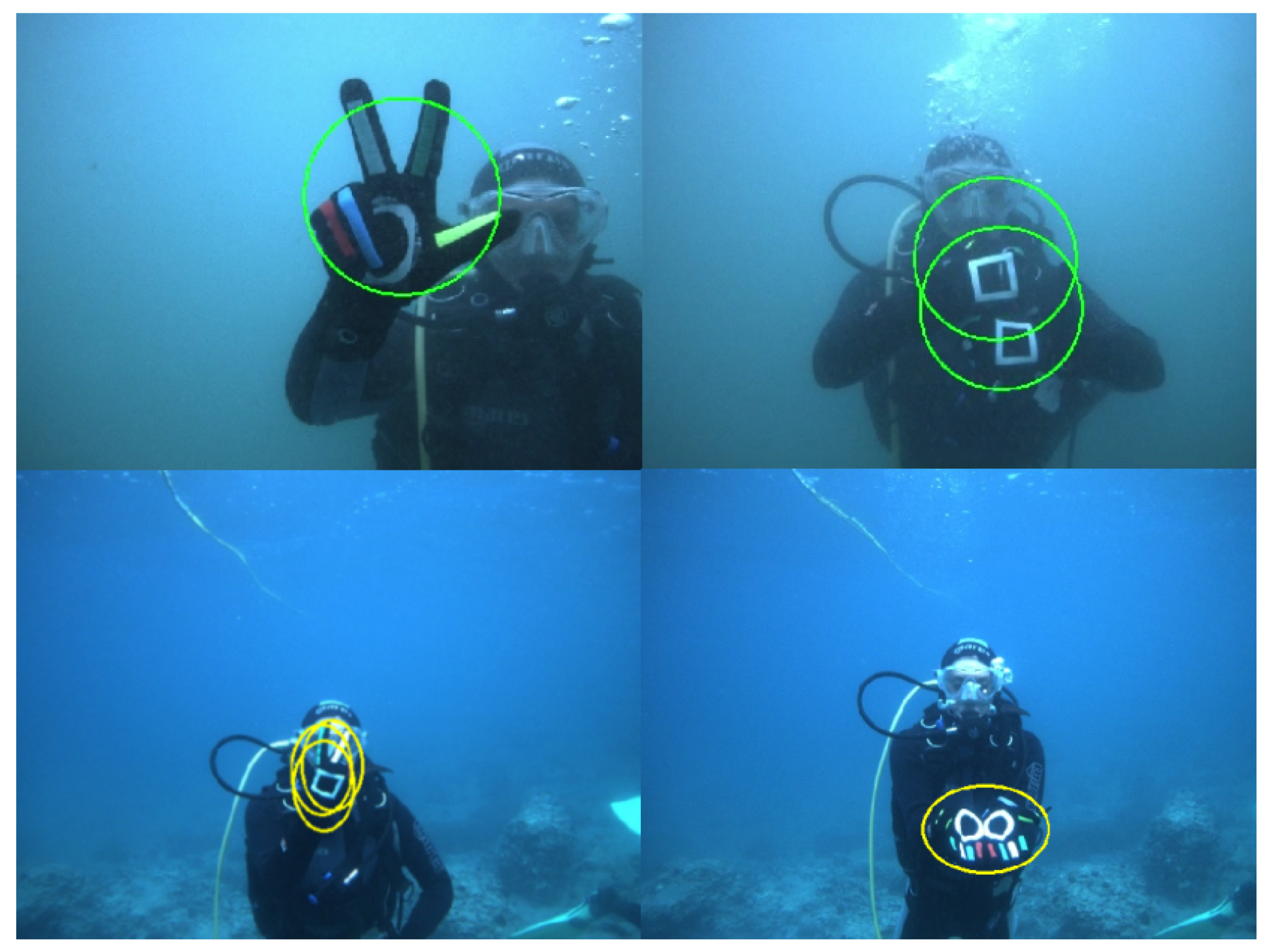
3.1. Human–Robot Interaction Based on Gestures
- if it is able to extract and match features from both hands, the amount of recognizable gestures increases (for an example of two-handed gesture, see the “boat” signal in [5]);
- if it is able to extract features and match them in the time domain, thus being able to classify hand gestures with motion, the gestures alphabet becomes richer (for an example of motion gesture, see the “something is wrong” gesture in [5]).
3.2. A Specialized Language
3.3. Communication Protocol and Error Handling
- green = IDLE STATE — everything is ok, all tasks have been accomplished and I’m waiting for orders;
- orange = BUSY STATE — everything is ok and I’m working the last mission received;
- red = FAILURE STATE — a system failure has been detected or an emergency has been issued.
- the AUV does not recognize a gesture inside a sequence: the robot shows an error message and the diver repeats the gesture, but the sequence is not aborted. This allows the diver to make mistakes and, in such cases, to save time avoiding to repeat the whole sequence.
- the AUV recognizes the sequence, but the resulting command is not semantically correct. When the whole sequence is issued, a semantical error message is shown: the sequence of gestures is aborted and must be repeated.
- the AUV recognizes the sequence and the resulting command is semantically correct, but it is not what the diver intended. This type of error is more subtle, because it involves a semantical evaluation that only the diver is able operate with the necessary swiftness.
- Divers should always understand if the assigned mission has been terminated.
- Divers should always be able to know the progress of a mission.
- the buddy is in operation executing a task;
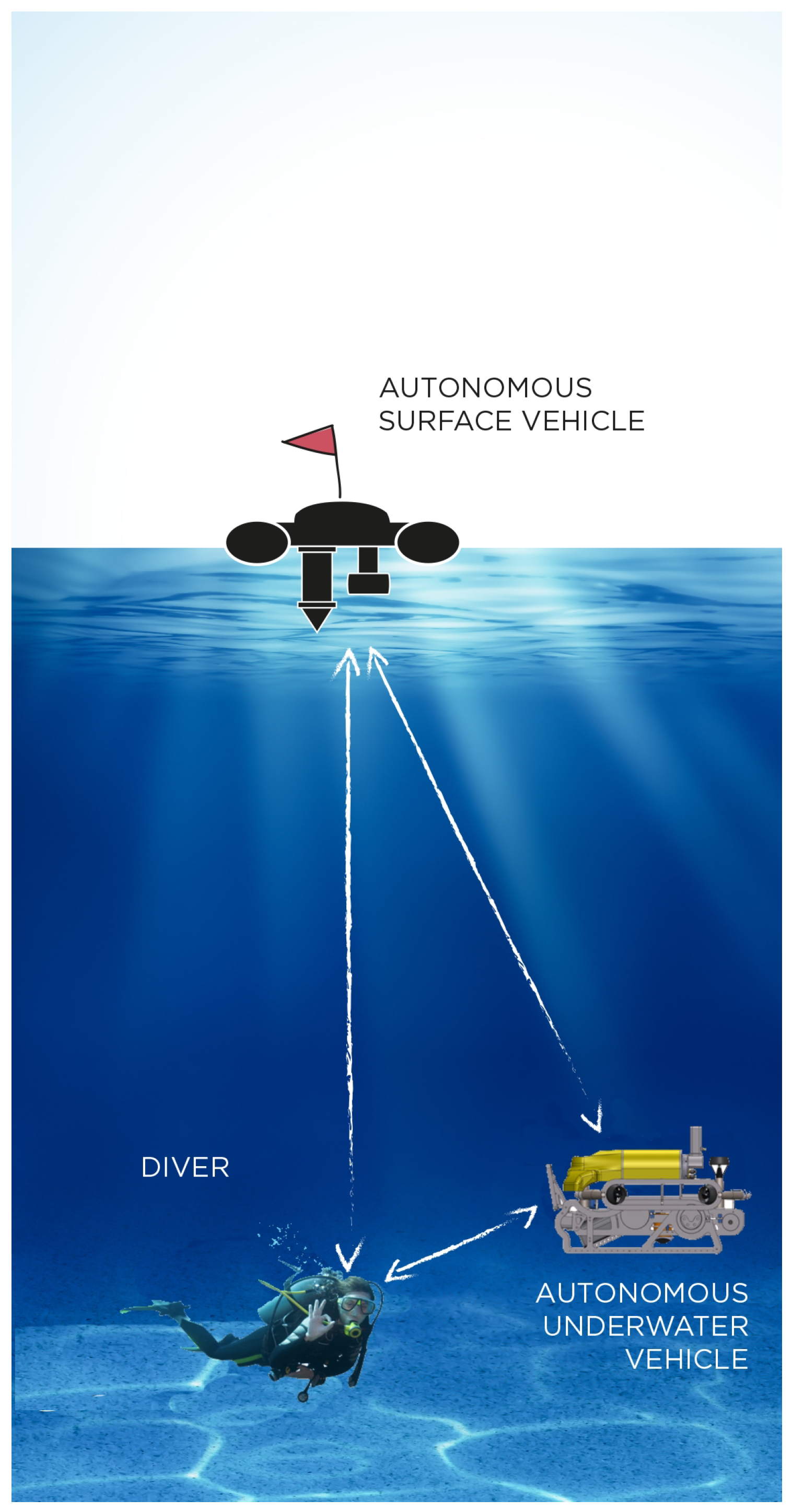
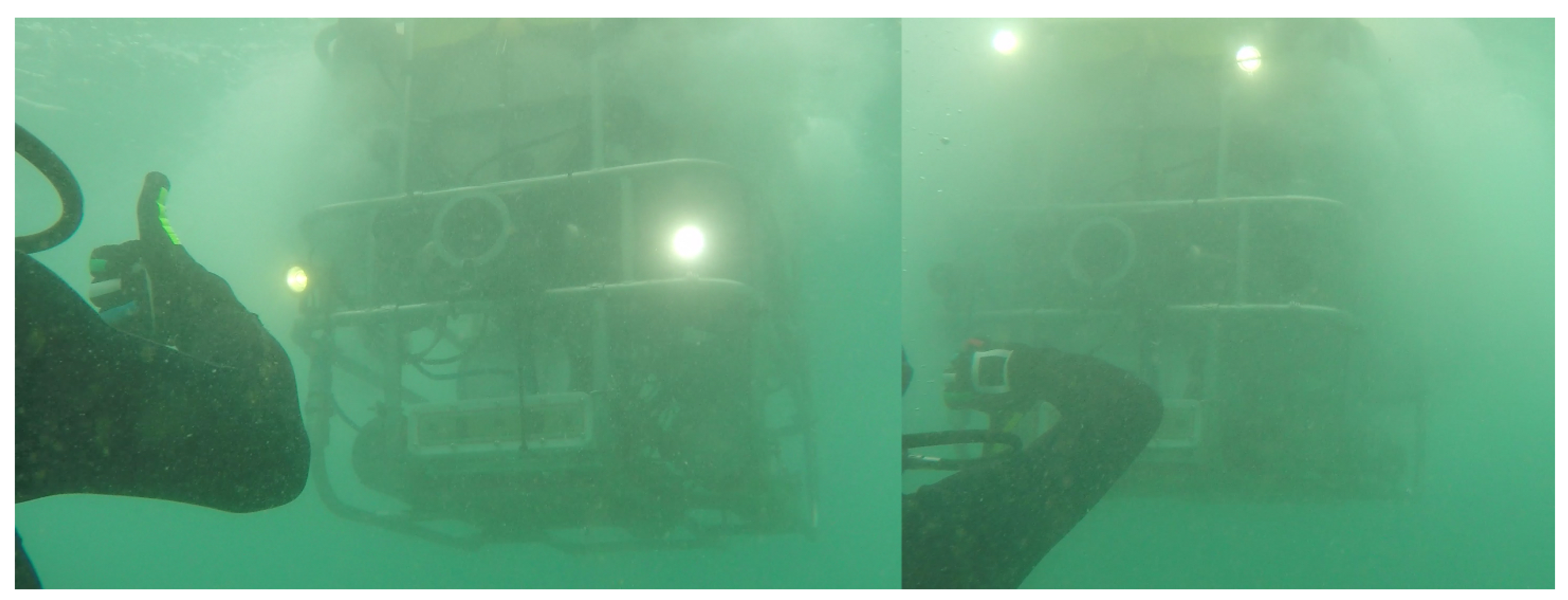
- the diver approaches the buddy, facing it, to be clearly visible on both the camera and the sonar;
- for safety reasons, the diver always remains outside a predefined safety range (e.g., 2 m). If closer, the buddy is programmed to automatically back off from the diver.
- if all the above conditions are met, the buddy AUV suspends the current action, remaining however in the BUSY state.
- query the AUV on the mission’s progress with the “Check” command;
- erase the current mission with the “Abort mission” command;
- report an emergency using a command belonging to the “Problems” subset;
- leave the range of safety, letting the AUV return to the assigned mission.
3.4. Language Definition
- -
- a finite set of terminal symbols (disjoint from ), the alphabet, which are assembled to form the sentences of the language;
- -
- a finite set of non-terminal symbols or variables or syntactic categories, which represents some collection of subphrases of the sentences;
- -
- a finite set of rules or productions which describe how each non-terminal is defined in terms of terminal symbols and non-terminals. Each production has the form , where B is a non-terminal and is a string of symbols from the infinite set of strings ;
- -
- a differentiated non-terminal , the start symbol, which specifies the principal category being defined, such as a sentence, a program, or a mission.
3.5. Syntax
<S> ::= A <α> <S> | ∀ <α> ::= <agent> <m-action> <object> <place> | ƀ<feedback> <p-action> <problem> | <set-variable> | <feedback> | <interrupt> | <work> | ⌀ | Δ <agent> ::= I | Y | W <m-action> ::= T | C | D | F | G <direction> <num> <direction> ::= forward | back | left | right | up | down <object> ::= <agent> | Λ <place> ::= B | P | H | Λ <problem> ::= E | C1 | B3 | Pg | A1 | K | V | Λ <p-action> ::= H1 | B2 | D1 | Λ <feedback> ::= ok | no | U | Λ <set-variable> ::= S <quantity> | L <level> | P | L1 <quantity> | A1 <quantity> <quantity> ::= + | − <level> ::= const | limit | free <interrupt> ::= Y < feedback > D <work> ::= Te <area> | Te <place> | Fo <area> | Fo <place> | wait <num> check | <feedback> carry | for <num> <works> end | Λ <works> ::= <work> <works> | Λ <area> ::= <num> <num> | <num> <num> ::= <digit> <num> | Ψ <digit> ::= 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 0
3.6. Semantics
- Speed: the robot speed has discrete values. With the “+” or “-” signs, the diver increases or decreases this variable by a quantum.
- Level:
- -
- constant: any following command is carried out at the current level of depth;
- -
- off: the buddy AUV cannot move below the actual depth: if a subsequent command tries to force the buddy AUV to break this rule, the robot interrupts the mission. This behavior has been thought as a safety measure mainly for the buddy AUV (and for the diver as a direct consequence) but it may be also useful in specific scenarios, for example, during the exploration of archaeological sites;
- -
- free: clears previous statuses set by other commands which refer to the level of depth: the AUV is now free to move up and down underwater.
- Point of Interest: set a single point of interest, to be recalled later within other commands.
- Light: this is a binary variable which switches on or off the vehicle lights.
- Air: this is a binary variable which toggles on or off the vehicle’s onboard oxygen cylinder.
- Here: store the actual 3D coordinates of the position in memory (i.e., where the buddy is located while the command is being issued, and its yaw angle—where the buddy is facing).
- Boat: boat or base position, which cannot be set by the diver.
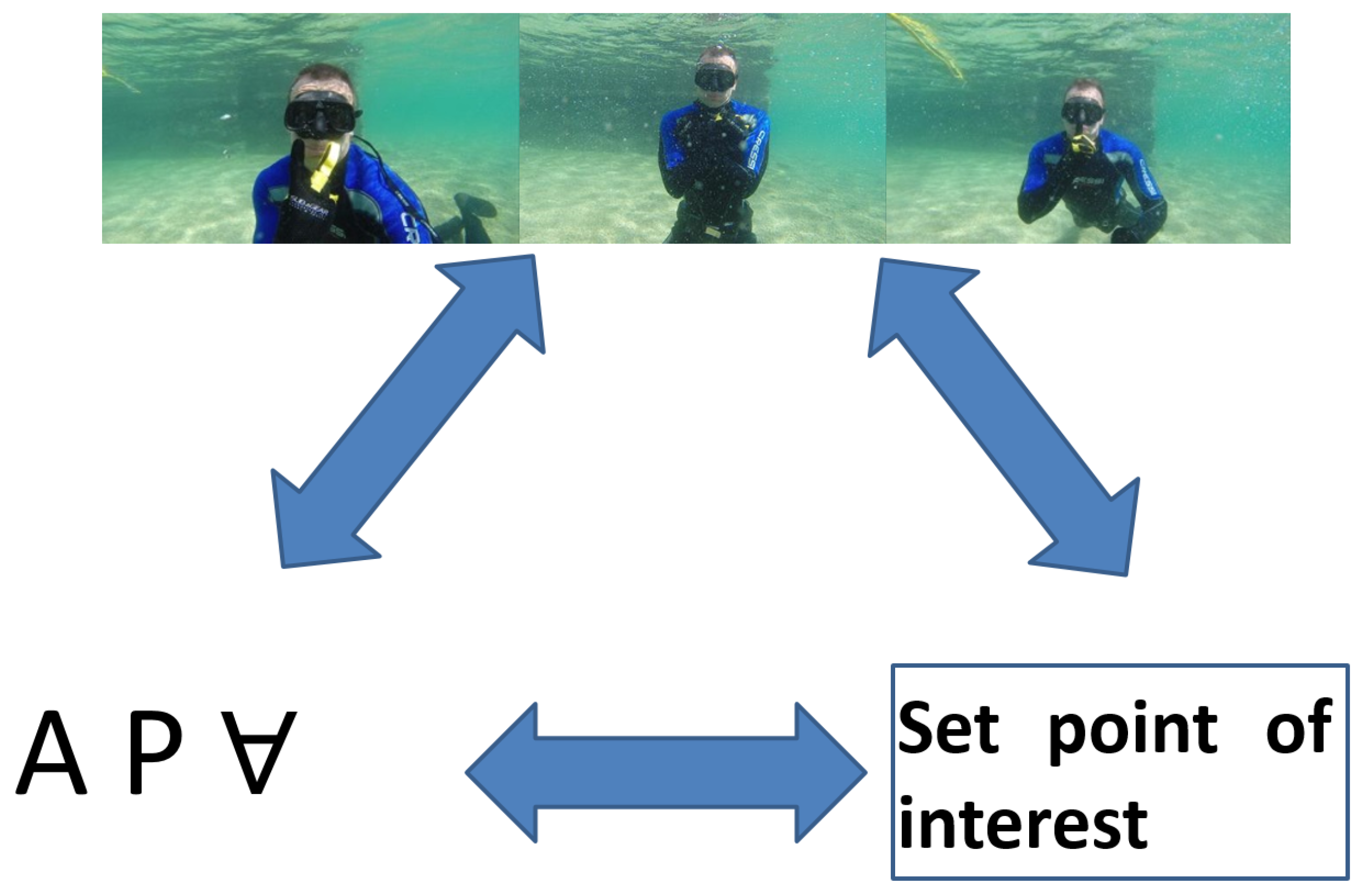
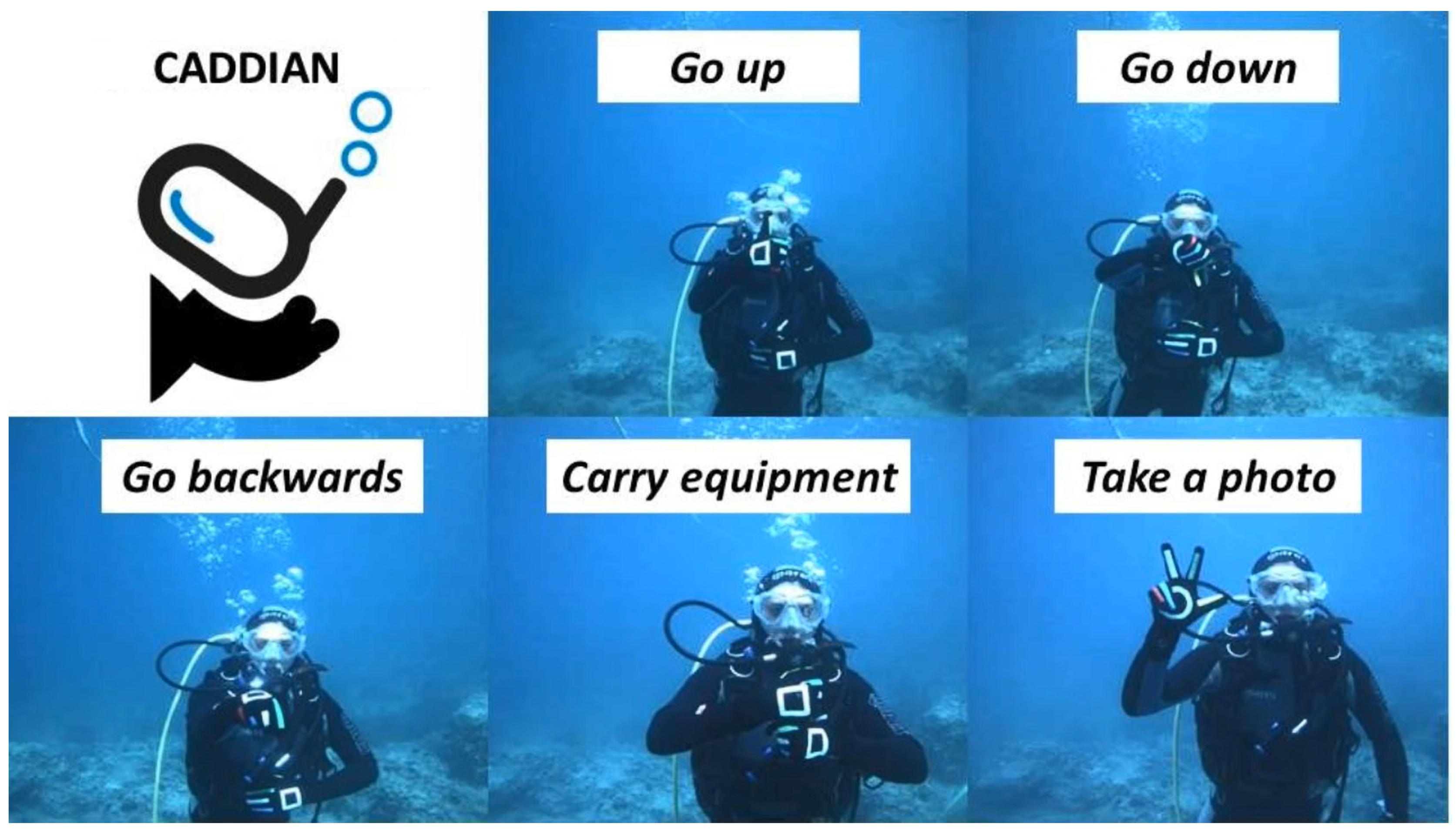
4. Outline of Gestures Used during Trials
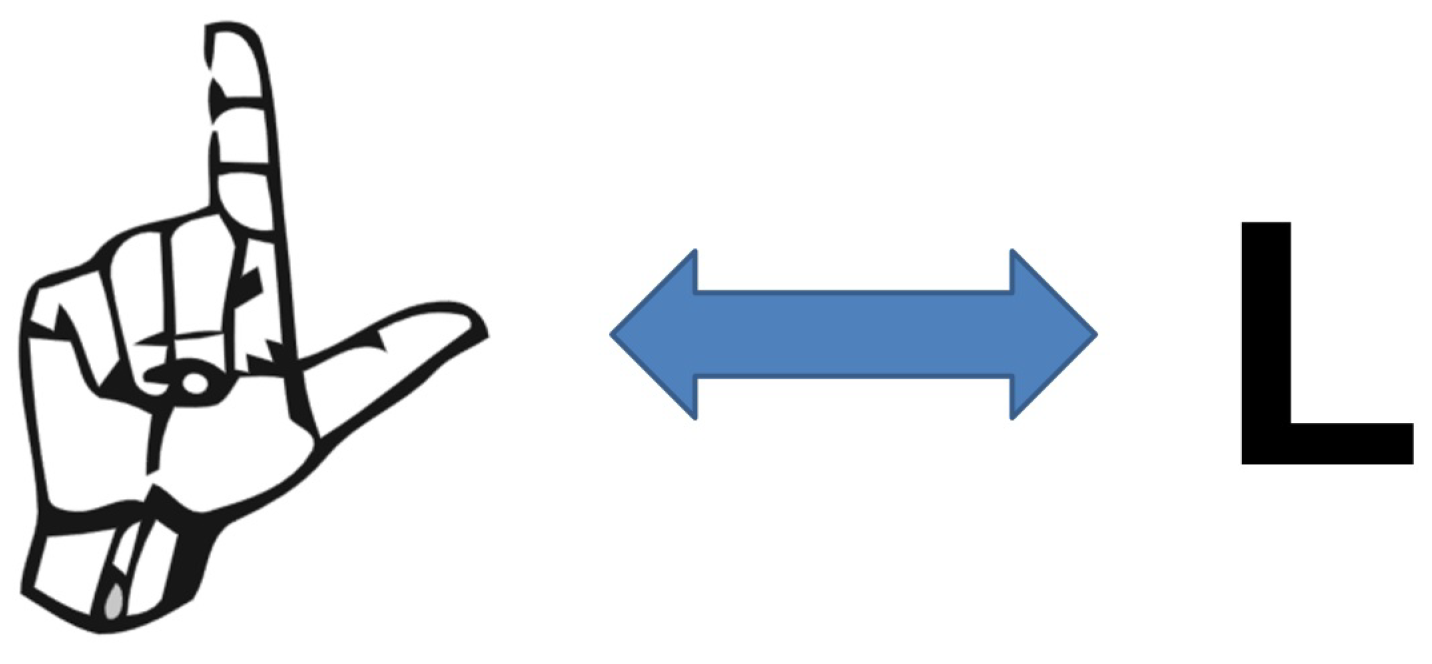
Mapping Gestures to Syntax; Syntax to Semantics
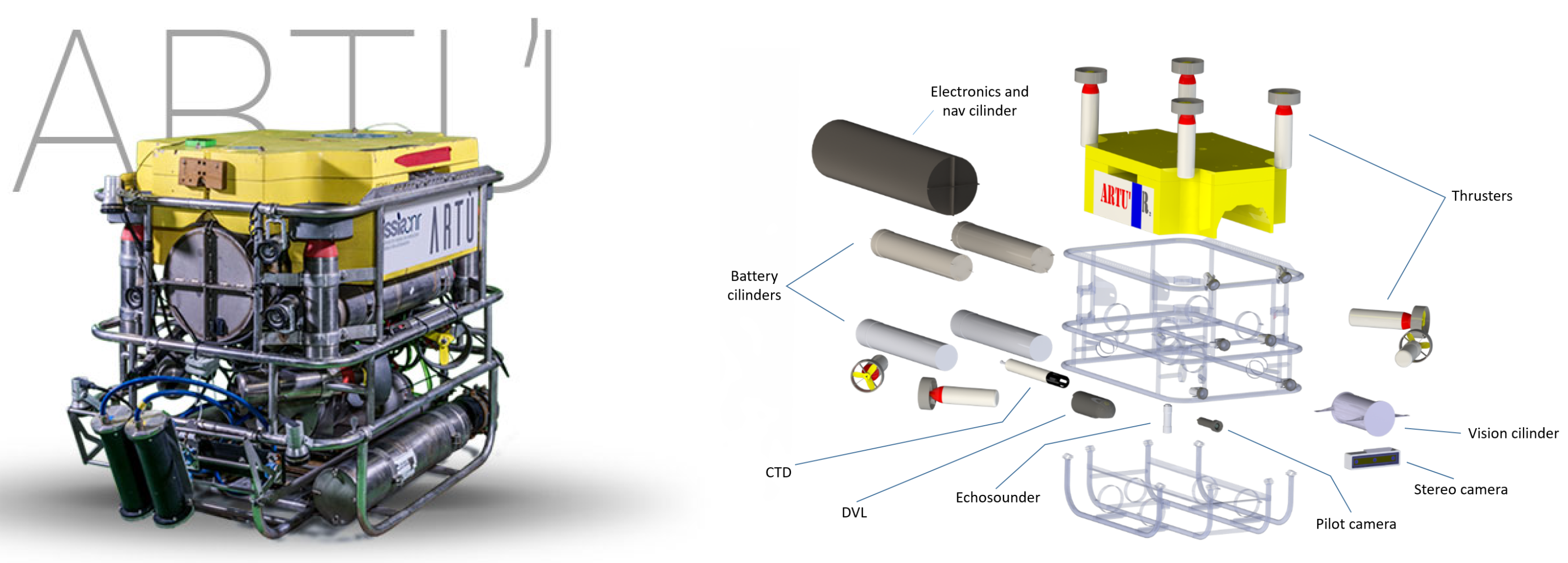
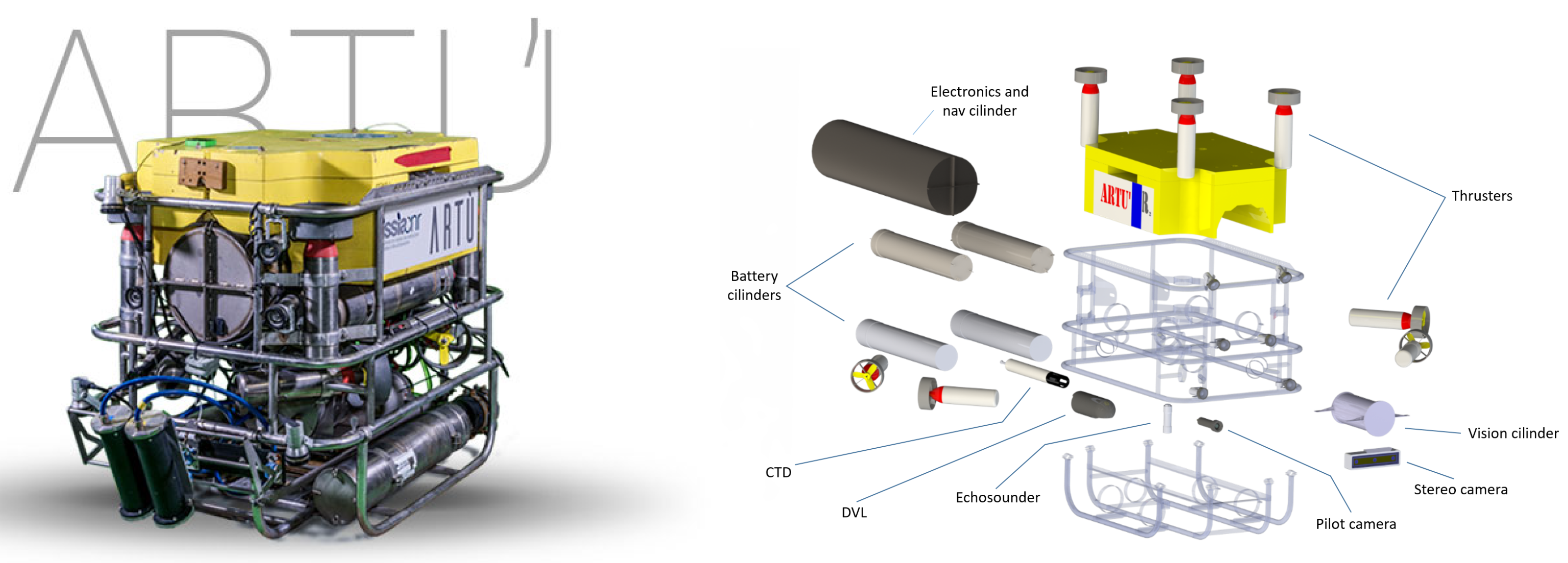
5. Outline of Trial Vehicle: R2 ROV
- IMU (Inertial Measurement Unit): Quadrans 3-axis Fiber Optic Gyro and 3DM-GX3-35 MicroStrain AHRS (Attitude Heading Reference System);
- GPS (Global Positioning System): 3DM-GX3-35 MicroStrain AHRS (Attitude Heading Reference System);
- Stereo camera: BumbleeBee XB3 13SC-38 3 sensor multi-baseline color camera;
- CTD (Conductivity, Temperature, and Depth sensors) : OceanSeven 304 Plus;
- Sonars: 2 Tritech PA500 echosounders (1 for seafloor detection and 1 for front obstacle detection);
- Lights: 6 front-mounted LED-based (Light-emitting diode) high intensity spot lights.
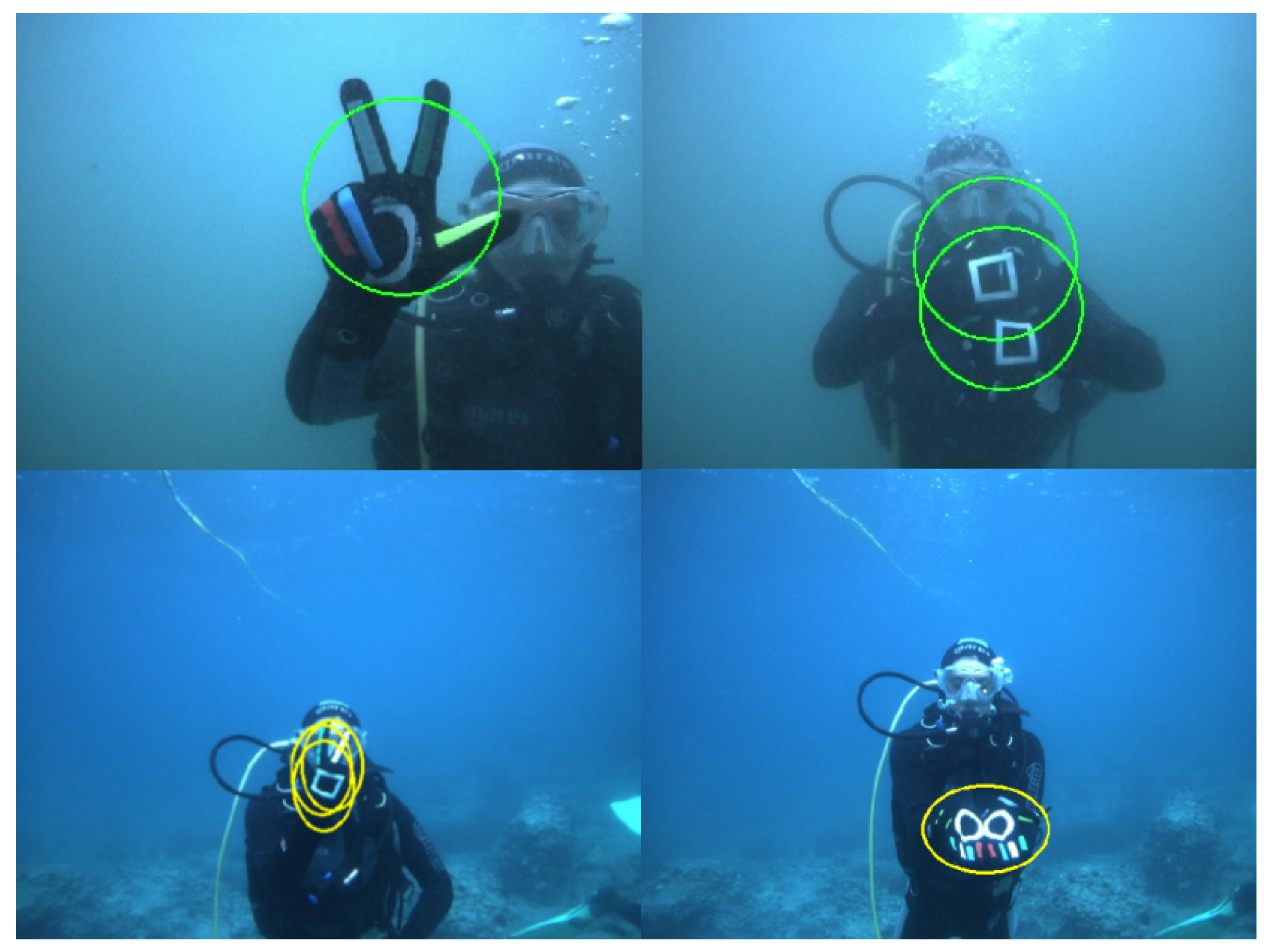
6. Trials at Sea and at Pool
- Movement Missions—In this kind of mission, the diver issues a movement command with a number (i.e., “Go up 1 m”).
- “Take a photo” Missions—In this kind of mission, the diver commands the AUV to take a picture from the point where it is stationing.
- “Do a mosaic” Missions—In this kind of mission, the diver commands the AUV to do a mosaic/tessellation of an area n x m of the seabed (see Section 3 under Works).
- Complex Missions—In this kind of mission, the diver commands the AUV to go to the boat and bring back a tool.
<S> ::= A <α> <S> | ∀ <α> ::= <direction> <num> | <place> | <work> <direction> ::= forward | back | up | down <place> ::= B | H | Λ <work> ::= Te <area> | Fo | carry | Λ <area> ::= <num> <num> | <num> <num> ::= <digit> <num> | Ψ <digit> ::= 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 0
- Movement missions:
- -
- “Go up 1 m”: A up 1 ∀
- -
- “Go down 1 m”: A down 1 ∀
- -
- “Go back 1 m”: A back 1 ∀
- -
- “Go forward 1 m”: A forward 1 ∀
- “Take a photo” mission: A Fo ∀
- “Do a mosaic” mission: A Te 2 4 ∀
- Complex mission: A B A carry A H ∀
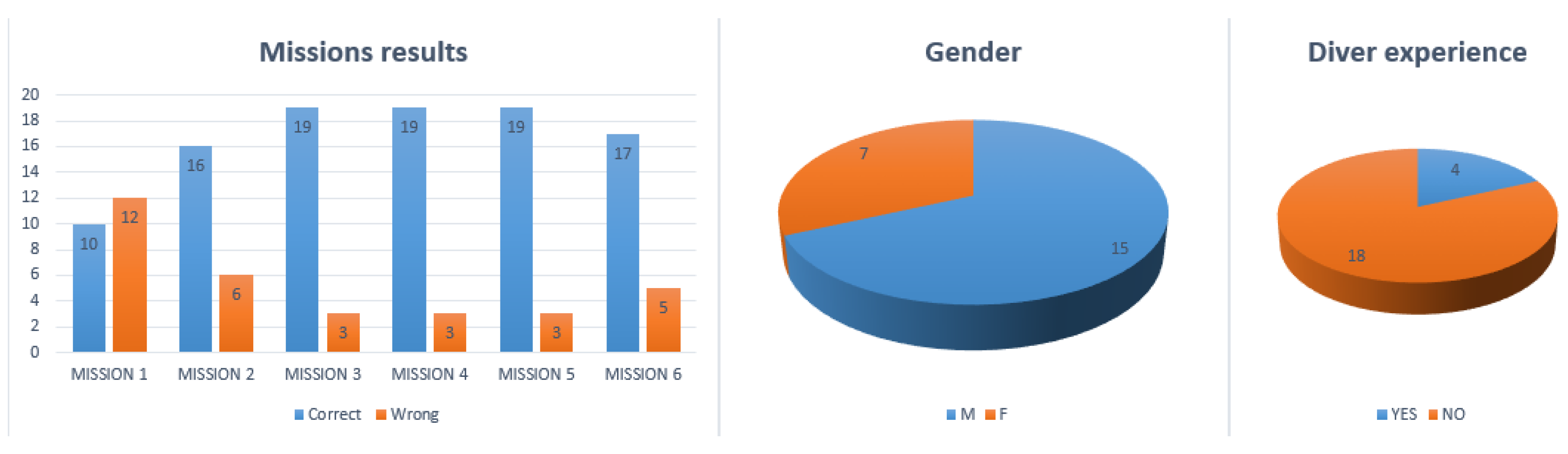
7. Results
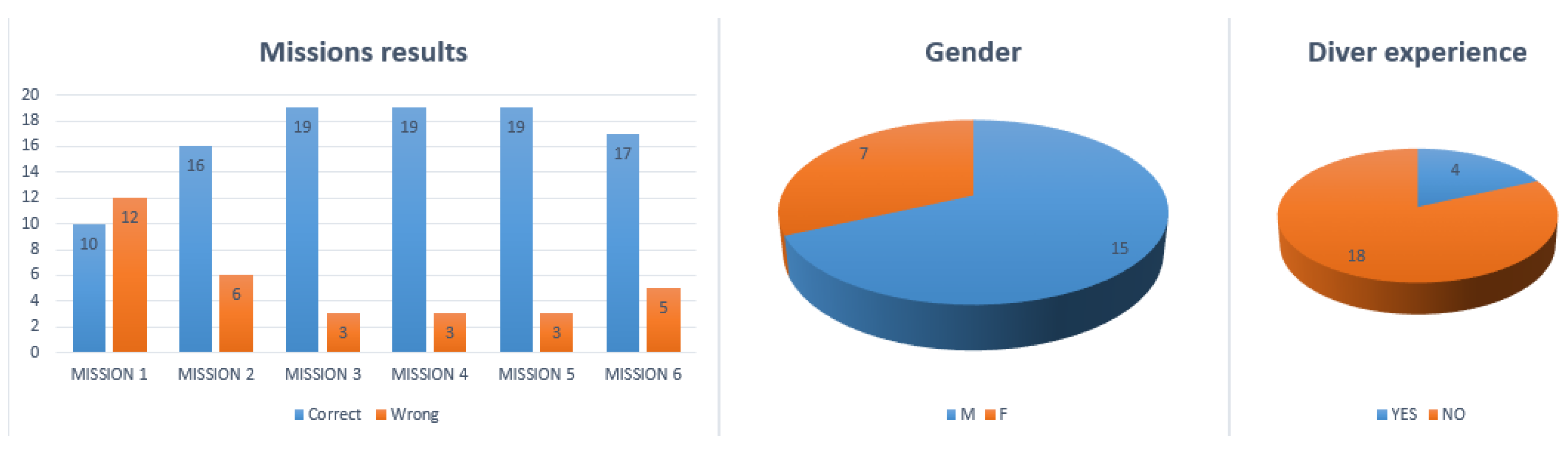
8. Cognition and Ease of Language Learning: Evaluation on Dry Land
- Mission 1: “Go up 1 m”;
- Mission 2: “Go down 1 m”;
- Mission 3: “Go back 1 m”;
- Mission 4: “Take a photo”;
- Mission 5: “Do a mosaic”;
- Mission 6: “Go to boat, bring me something (carry equipment), come back here.”
- CLOSE_NUM_1: forgetting “close number” when issuing the mission.
- NUMBER_ONE: confusing/swapping the “number one” with “close communication.”
- UP: forgetting the “UP” gesture and issuing only the meters to go. The error of forgetfulness of a gesture appears only in the first and third mission. This error is supposed to be due to the initial nervousness of the candidate.
- CLOSE_COMM: confusing/swapping the “close communication’ with “number one.”
- DOWN: wrong orientation of the hand.
- CLOSE_NUM_2: confusing/swapping the “close number” with “close communication.”
- BACKWARDS: forgetting the “BACKWARDS” gesture and issuing only the meters to go. The error of forgetfulness of a gesture appears only in the first and third missions. This error is supposed to be due to the nervousness of the candidate.
- TAKE_PHOTO: wrong orientation of the hand.
- MOSAIC: wrong orientation of the hands.
- NUMBERS: wrong orientation of the hand.
- BOAT_CARRY: the candidate did not remember the gestures for “boat” or “carry.”
- HERE_1: the candidate did not remember the gestures for “come here.”
- START_MSG: candidate uses, in the complex mission, the “start message” gesture to close the communication. This may also be an indication for a further improvement of the language where a single gesture is used to both open and close the communication. In this case, the interarrival time could be used as information to separate one communication from the following one.
- HERE_2: confusing/swapping the “here" gesture with “go backwards.”
9. Conclusions
Supplementary Materials
Supplementary File 1Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Cu, J.H.; Kong, J.; Gerla, M.; Zhou, S. The challenges of building mobile underwater wireless networks for aquatic applications. IEEE Netw. 2006, 20, 12–18. [Google Scholar]
- Kilfoyle, D.; Baggeroer, A. The state of the art in underwater acoustic telemetry. IEEE J. Ocean Eng. 2000, 25, 4–27. [Google Scholar] [CrossRef]
- Neasham, J.; Hinton, O. Underwater acoustic communications—How far have we progressed and what challenges remain. In Proceedings of the 7th European Conference on Underwater Acoustics, Delft, The Netherlands, 5–8 July 2004. [Google Scholar]
- Confédération Mondiale des Activités Subaquatiques. Segni Convenzionali CMAS. Online pdf. 2003. Available online: https://www.cmas.ch/docs/it/downloads/codici-comunicazione-cmas/it-Codici-di-comunicazione-CMAS.pdf (accessed on 25 May 2018).
- Recreational Scuba Training Council. Common Hand Signals for Recreational Scuba Diving. Online Pdf. 2005. Available online: http://www.neadc.org/CommonHandSignalsforScubaDiving.pdf (accessed on 25 May 2018).
- Scuba Diving Fan Club. Most Common Diving Signals. HTML Page. 2016. Available online: http://www.scubadivingfanclub.com/Diving_Signals.html (accessed on 25 May 2018).
- Jorge, M. Diving Signs You Need to Know. HTML Page. 2012. Available online: http://www.fordivers.com/en/blog/2013/09/12/senales-de-buceo-que-tienes-que-conocer/ (accessed on 25 May 2018).
- Chiarella, D.; Bibuli, M.; Bruzzone, G.; Caccia, M.; Ranieri, A.; Zereik, E.; Marconi, L.; Cutugno, P. Gesture-based language for diver-robot underwater interaction. In Proceedings of the OCEANS 2015—Genova, Genoa, Italy, 18–21 May 2015; pp. 1–9. [Google Scholar] [CrossRef]
- Tao, Y.; Wei, H.; Wang, T. A Speech Interaction System Based on Finite State Machine for Service Robot. In Proceedings of the 2008 International Conference on Computer Science and Software Engineering, Wuhan, China, 12–14 December 2008; Volume 1, pp. 1111–1114. [Google Scholar] [CrossRef]
- Xu, Y.; Guillemot, M.; Nishida, T. An experiment study of gesture-based human-robot interface. In Proceedings of the 2007 IEEE/ICME International Conference on Complex Medical Engineering, Beijing, China, 23–27 May 2007; pp. 457–463. [Google Scholar] [CrossRef]
- Waldherr, S.; Romero, R.; Thrun, S. A Gesture Based Interface for Human-Robot Interaction. Auton. Rob. 2000, 9, 151–173. [Google Scholar] [CrossRef]
- Chomsky, N. Three models for the description of language. IRE Trans. Inf. Theory 1956, 2, 113–124. [Google Scholar] [CrossRef]
- Backus, J.W. The Syntax and Semantics of the Proposed International Algebraic Language of the Zurich ACM-GAMM Conference. In Proceedings of the International Conference on Information Processing, UNESCO, Paris, France, 15–20 June 1959. [Google Scholar]
- Dudek, G.; Sattar, J.; Xu, A. A Visual Language for Robot Control and Programming: A Human-Interface Study. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 2507–2513. [Google Scholar]
- Xu, A.; Dudek, G.; Sattar, J. A natural gesture interface for operating robotic systems. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, ICRA, Pasadena, CA, USA, 19–23 May 2008; pp. 3557–3563. [Google Scholar]
- Fiala, M. ARTag, a Fiducial Marker System Using Digital Techniques. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA, 20–25 June 2005; IEEE Computer Society: Washington, DC, USA, 2005; Volume 5, pp. 590–596. [Google Scholar] [CrossRef]
- Sattar, J.; Bourque, E.; Giguere, P.; Dudek, G. Fourier tags: Smoothly degradable fiducial markers for use in human-robot interaction. In Proceedings of the Fourth Canadian Conference on Computer and Robot Vision (CRV ’07), Montreal, QC, Canada, 28–30 May 2007; pp. 165–174. [Google Scholar] [CrossRef]
- Islam, M.J.; Ho, M.; Sattar, J. Dynamic Reconfiguration of Mission Parameters in Underwater Human-Robot Collaboration. arXiv, 2017; arXiv:1709.08772. [Google Scholar]
- Xu, P. Gesture-based Human-robot Interaction for Field Programmable Autonomous Underwater Robots. arXiv, 2017; arXiv:1709.08945. [Google Scholar]
- Kim, B.; Jun, B.H.; Sim, H.W.; Lee, F.O.; Lee, P.M. The development of Tiny Mission Language for the ISiMI100 Autonomous Underwater Vehicle. In Proceedings of the OCEANS 2010 MTS/IEEE SEATTLE, Seattle, WA, USA, 20–23 September 2010; pp. 1–6. [Google Scholar] [CrossRef]
- Garg, P.; Aggarwal, N.; Sofat, S. Vision based hand gesture recognition. World Acad. Sci. Eng. Technol. 2009, 49, 972–977. [Google Scholar]
- Manresa, C.; Varona, J.; Mas, R.; Perales, F. Hand tracking and gesture recognition for human-computer interaction. Electr. Lett. Comput. Vis. Image Anal. 2005, 5, 96–104. [Google Scholar] [CrossRef]
- Rautaray, S.S.; Agrawal, A. Vision Based Hand Gesture Recognition for Human Computer Interaction: A Survey. Artif. Intell. Rev. 2015, 43, 1–54. [Google Scholar] [CrossRef]
- Biswas, K.; Basu, S.K. Gesture Recognition using Microsoft Kinect®. In Proceedings of the 5th International Conference on Automation, Robotics and Applications, Wellington, New Zealand, 6–8 December 2011; pp. 100–103. [Google Scholar]
- Kawulok, M. Adaptive skin detector enhanced with blob analysis for gesture recognition. In Proceedings of the 2009 International Symposium ELMAR, Zadar, Croatia, 28–30 September 2009; pp. 37–40. [Google Scholar]
- Elsayed, R.A.; Sayed, M.S.; Abdalla, M.I. Skin-based adaptive background subtraction for hand gesture segmentation. In Proceedings of the 2015 IEEE International Conference on Electronics, Circuits, and Systems (ICECS), Cairo, Egypt, 6–9 December 2015; pp. 33–36. [Google Scholar]
- Chang, C.W.; Chang, C.H. A two-hand multi-point gesture recognition system based on adaptive skin color model. In Proceedings of the 2011 International Conference on Consumer Electronics, Communications and Networks (CECNet), XianNing, China, 16–18 April 2011; pp. 2901–2904. [Google Scholar] [CrossRef]
- Ghaziasgar, M.; Connan, J.; Bagula, A.B. Enhanced adaptive skin detection with contextual tracking feedback. In Proceedings of the 2016 Pattern Recognition Association of South Africa and Robotics and Mechatronics International Conference (PRASA-RobMech), Stellenbosch, South Africa, 30 November–2 December 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Barneva, R.P.; Brimkov, V.E.; Hung, P.; Kanev, K. Motion tracking for gesture analysis in sports. In Proceedings of the 2016 IEEE Western New York Image and Signal Processing Workshop (WNYISPW), Rochester, NY, USA, 18 November 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Jiang, Y.; Hayashi, I.; Hara, M.; Wang, S. Three-dimensional motion analysis for gesture recognition using singular value decomposition. In Proceedings of the 2010 IEEE International Conference on Information and Automation, Harbin, China, 20–23 June 2010; pp. 805–810. [Google Scholar] [CrossRef]
- Jost, C.; Loor, P.D.; Nédélec, L.; Bevacqua, E.; Stanković, I. Real-time gesture recognition based on motion quality analysis. In Proceedings of the 2015 7th International Conference on Intelligent Technologies for Interactive Entertainment (INTETAIN), Turin, Italy, 10–12 June 2015; pp. 47–56. [Google Scholar]
- Czuszynski, K.; Ruminski, J.; Wtorek, J. Pose classification in the gesture recognition using the linear optical sensor. In Proceedings of the 2017 10th International Conference on Human System Interactions (HSI), Ulsan, Korea, 17–19 July 2017; pp. 18–24. [Google Scholar] [CrossRef]
- Ng, C.W.; Ranganath, S. Gesture recognition via pose classification. In Proceedings of the 15th International Conference on Pattern Recognition, ICPR-2000, Barcelona, Spain, 3–7 September 2000; Volume 3, pp. 699–704. [Google Scholar] [CrossRef]
- Yamashita, A.; Fujii, M.; Kaneko, T. Color registration of underwater images for underwater sensing with consideration of light attenuation. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 4570–4575. [Google Scholar]
- Oliveira, M.; Sutherland, A.; Farouk, M. Two-stage PCA with interpolated data for hand shape recognition in sign language. In Proceedings of the 2016 IEEE Applied Imagery Pattern Recognition Workshop (AIPR), Washington, DC, USA, 18–20 October 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Birk, H.; Moeslund, T.B.; Madsen, C.B. Real-Time Recognition of Hand Alphabet Gestures Using Principal Component Analysis. In Proceedings of the 10th Scandinavian Conference on Image Analysis, Lappenranta, Finland, 9–11 June 1997. [Google Scholar]
- Saxena, A.; Jain, D.K.; Singhal, A. Sign Language Recognition Using Principal Component Analysis. In Proceedings of the 2014 Fourth International Conference on Communication Systems and Network Technologies, Bhopal, India, 7–9 April 2014; pp. 810–813. [Google Scholar] [CrossRef]
- Masurelle, A.; Essid, S.; Richard, G. Gesture recognition using a NMF-based representation of motion-traces extracted from depth silhouettes. In Proceedings of the 2014 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Florence, Italy, 4–9 May 2014; pp. 1275–1279. [Google Scholar] [CrossRef]
- Edirisinghe, E.M.P.S.; Shaminda, P.W.G.D.; Prabash, I.D.T.; Hettiarachchige, N.S.; Seneviratne, L.; Niroshika, U.A.A. Enhanced feature extraction method for hand gesture recognition using support vector machine. In Proceedings of the 2013 IEEE 8th International Conference on Industrial and Information Systems, Peradeniya, Sri Lanka, 17–20 December 2013; pp. 139–143. [Google Scholar] [CrossRef]
- Chavez, A.G.; Pfingsthorn, M.; Birk, A.; Rendulić, I.; Misković, N. Visual diver detection using multi-descriptor nearest-class-mean random forests in the context of underwater Human Robot Interaction (HRI). In Proceedings of the OCEANS 2015—Genova, Genoa, Italy, 8–21 May 2015; pp. 1–7. [Google Scholar] [CrossRef]
- Saha, H.N.; Tapadar, S.; Ray, S.; Chatterjee, S.K.; Saha, S. A Machine Learning Based Approach for Hand Gesture Recognition using Distinctive Feature Extraction. In Proceedings of the 2018 IEEE 8th Annual Computing and Communication Workshop and Conference (CCWC), Las Vegas, NV, USA, 8–10 January 2018; pp. 91–98. [Google Scholar] [CrossRef]
- Hopcroft, J.E.; Motwani, R.; Ullman, J.D. chapter Context-Free Grammars and Languages. In Introduction to Automata Theory, Languages, and Computation, 2nd ed.; Addison-Wesley: Boston, MA, USA, 2001; pp. 169–217. [Google Scholar]
- Jurafsky, D.; Martin, J.H. chapter Context-Free Grammars. In Speech and Language Processing; Prentice Hall: Upper Saddle River, NJ, USA, 2014; pp. 395–435. [Google Scholar]
- Mišković, N.; Bibuli, M.; Birk, A.; Caccia, M.; Egi, M.; Grammer, K.; Marroni, A.; Neasham, J.; Pascoal, A.; Vasilijević, A.; Vukić, Z. CADDY—Cognitive Autonomous Diving Buddy: Two Years of Underwater Human-Robot Interaction. Mar. Technol. Soc. J. 2016, 50, 54–66. [Google Scholar] [CrossRef]
- Mišković, N.; Pascoal, A.; Bibuli, M.; Caccia, M.; Neasham, J.A.; Birk, A.; Egi, M.; Grammer, K.; Marroni, A.; Vasilijević, A.; et al. CADDY Project, Year 2: The First Validation Trials. In Proceedings of the 10th IFAC Conference on Control Applications in Marine SystemsCAMS, Trondheim, Norway, 13–16 September 2016; Volume 49, pp. 420–425. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Group | Commands/Messages | |
|---|---|---|
| Problems | I have an ear problem | I’m out of breath |
| I’m out of air [air almost over] | Something is wrong [diver] | |
| I depleted air | Something is wrong [environment] | |
| I’m cold | I have a cramp | |
| I have vertigo | ||
| Movement | Take me to the boat | You lead (I follow you) |
| Take me to the point of interest | I lead (you follow me) | |
| Go X Y | Return to/come X | |
| Interrupt | Stop [interruption of action] | Abort mission |
| Let’s go [continue previous action] | General evacuation | |
| Setting Variables | Keep this level (actions are carried out at this level) | Free level (“Keep this level” command does not apply any more) |
| Level Off (AUV cannot fall below this level) | Slow down/Accelerate | |
| Set point of interest | Give me air (switch on the on board oxygen cylinder) | |
| Give me light (switch on the on board lights) | No more air (switch off the on board oxygen cylinder) | |
| No more light (switch off the on board lights) | ||
| Feedback | No (answer to repetition of the list of gestures) | I don’t understand (repeat please) |
| Ok (answer to repetition of the list of gestures) | ||
| Works | Wait n minutes | Tessellation X * Y area |
| Tell me what you’re doing | Photograph of X * Y area | |
| Carry a tool for me | Stop carrying the tool for me [release] | |
| Do this task or list of task n times | Photograph of point of interest/boat/here | |
| Tessellation of point of interest/boat/here | ||
| Message/Command | Caddian | |
|---|---|---|
| Problems | Ear problem | A ƀ |
| Out of breath | A ƀ | |
| Out of air [air almost over] | A ƀ | |
| Something is wrong [diver] | A ƀ | |
| Air depleted | A ƀ | |
| Something is wrong [environment] | A ƀ | |
| I’m cold | A ƀ | |
| I have a cramp | A ƀ | |
| I have vertigo | A ƀ | |
| Movement | Take me to the boat | |
| You lead (I follow you) | ||
| Take me to the point of interest | ||
| I lead (you follow me) | ||
| Go X Y | ||
| and | ||
| Return to/come X | ||
| Interrupt | Stop [interruption of action] | |
| Let’s go [continue previous action] | or | |
| Abort mission | ||
| General evacuation | ||
| Setting Variables | Slow down | |
| Accelerate | ||
| Set point of interest | ||
| Level Off | ||
| Keep this level | ||
| Free level | ||
| Give me air | ||
| No more air | ||
| Give me light | ||
| No more light | ||
| Feedback | No | |
| Ok | ||
| I don’t understand (repeat please) | ||
| Works | Wait n minutes | |
| Tessellation X * Y area | ||
| [square] | ||
| Tessellation of point of interest/boat/here | ||
| Tell me what you’re doing | ||
| Photograph of X * Y area | ||
| [square] | ||
| Take a picture of point of interest/boat/here | ||
| Carry a tool for me | ||
| Stop carrying the tool for me [release] | ||
| Do this task or list of task n times | ||
| Gesture | Semantic | Type of Error | Example | Occurrences |
|---|---|---|---|---|
| Close number | CLOSE_NUM_1 | A up 1 ∀ | 7 | |
| 1 | Number one | NUMBER_ONE | A up ∀ ∀ | 4 |
| up | Go up | UP | A 1 ∀ | 2 |
| ∀ | Close communication | CLOSE_COMM | A up 1 1 | 5 |
| down | down | DOWN | Wrong orientation | 1 |
| Close number | CLOSE_NUM_2 | A up 1 ∀ ∀ | 1 | |
| backwards | Go backwards | BACKWARDS | A 1 ∀ | 1 |
| Fo | Take a photo | TAKE_PHOTO | Wrong orientation | 3 |
| Te | Do a mosaic | MOSAIC | Wrong orientation | 2 |
| 2,4 | Number two and four | NUMBERS | Wrong orientation | 1 |
| B | Go to the boat | BOAT_CARRY | A A A H ∀ | 1 |
| H | Come back here | HERE_1 | A B A carry A ∀ | 2 |
| A | I’m starting a message | START_MSG | A B A carry A H A | 1 |
| H | Come back here | HERE_2 | A B A carry A backwards ∀ | 1 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chiarella, D.; Bibuli, M.; Bruzzone, G.; Caccia, M.; Ranieri, A.; Zereik, E.; Marconi, L.; Cutugno, P. A Novel Gesture-Based Language for Underwater Human–Robot Interaction. J. Mar. Sci. Eng. 2018, 6, 91. https://doi.org/10.3390/jmse6030091
Chiarella D, Bibuli M, Bruzzone G, Caccia M, Ranieri A, Zereik E, Marconi L, Cutugno P. A Novel Gesture-Based Language for Underwater Human–Robot Interaction. Journal of Marine Science and Engineering. 2018; 6(3):91. https://doi.org/10.3390/jmse6030091
Chicago/Turabian StyleChiarella, Davide, Marco Bibuli, Gabriele Bruzzone, Massimo Caccia, Andrea Ranieri, Enrica Zereik, Lucia Marconi, and Paola Cutugno. 2018. "A Novel Gesture-Based Language for Underwater Human–Robot Interaction" Journal of Marine Science and Engineering 6, no. 3: 91. https://doi.org/10.3390/jmse6030091