1. Introduction
The use of renewable energy has been increasing over the last 40 years and will keep increasing because of climate change concerns, the rise of the price of fossil resources, the need for energy independence and growing energy demand. Marine renewable energy has the potential to provide a significant amount of renewable energy.
The main challenge for the development of marine renewable energy is to be cost effective. The predicted electricity generating costs of marine energy converters (MEC) have been significantly decreasing in the last twenty years [
1]. In order to harvest the most energetic sea states, allowing increased competitiveness, systems have evolved from onshore to offshore systems and, consequently, from fixed to floating structures. Floating MECs require mooring systems, which are essential for the MEC’s survival. However, the cost of the mooring systems is much more critical for an MEC project than for an oil and gas project. In the example given by Fitzgerald [
2], for an oil and gas project, the mooring costs represent less than 2% of the lifetime costs, while the mooring costs are equal to 18% of the wave energy project lifetime costs.
MECs have specific requirements in terms of mooring systems. Large offshore structures have their resonant frequencies significantly different from the wave frequency (WF) in order to avoid large resonant effects. On the contrary, most of the MEC devices need to be designed for resonant WF to produce energy [
3]. The other MEC devices that do not need to be designed for resonant WF may also have physical properties (length, mass,
etc.) that do not allow avoiding their resonant frequency to be significantly different from WF excitations. Regarding wave energy converter (WEC) devices, whilst for some WEC devices, the power take-off (PTO) system is directly coupled to the mooring system, other device design principles have their PTO system acting against a moored “superstructure”; for example, the Wavedragon; the superstructure would typically be designed to be away from the excitation frequency [
3].
Prototype testing and full-scale testing of MEC devices are now being conducted. Field tests give insight into the behaviour of the MEC devices in real sea conditions. Measuring the mooring loads and the environmental conditions—wave and current, if available—of two mooring systems for several months, a methodology has been developed to identify the peak mooring loads and to present the mooring load measurements—their amplitude and percentage of occurrences—and their associated environmental conditions.
This paper is divided into seven sections, including the Introduction. The field measurements that have been used for this study are described in
Section 2. The methodology to detect peak mooring load is outlined in
Section 3. The assessment of the general environmental conditions and of the environmental conditions associated with peak mooring load is explained in
Section 4. Results are presented in
Section 5 and discussed in
Section 6, followed by a conclusion in
Section 7.
3. Methodology to Detect Peak Mooring Loads
A methodology has been developed to isolate peak mooring loads. Peak mooring loads are defined as sudden mooring loads with a large amplitude.
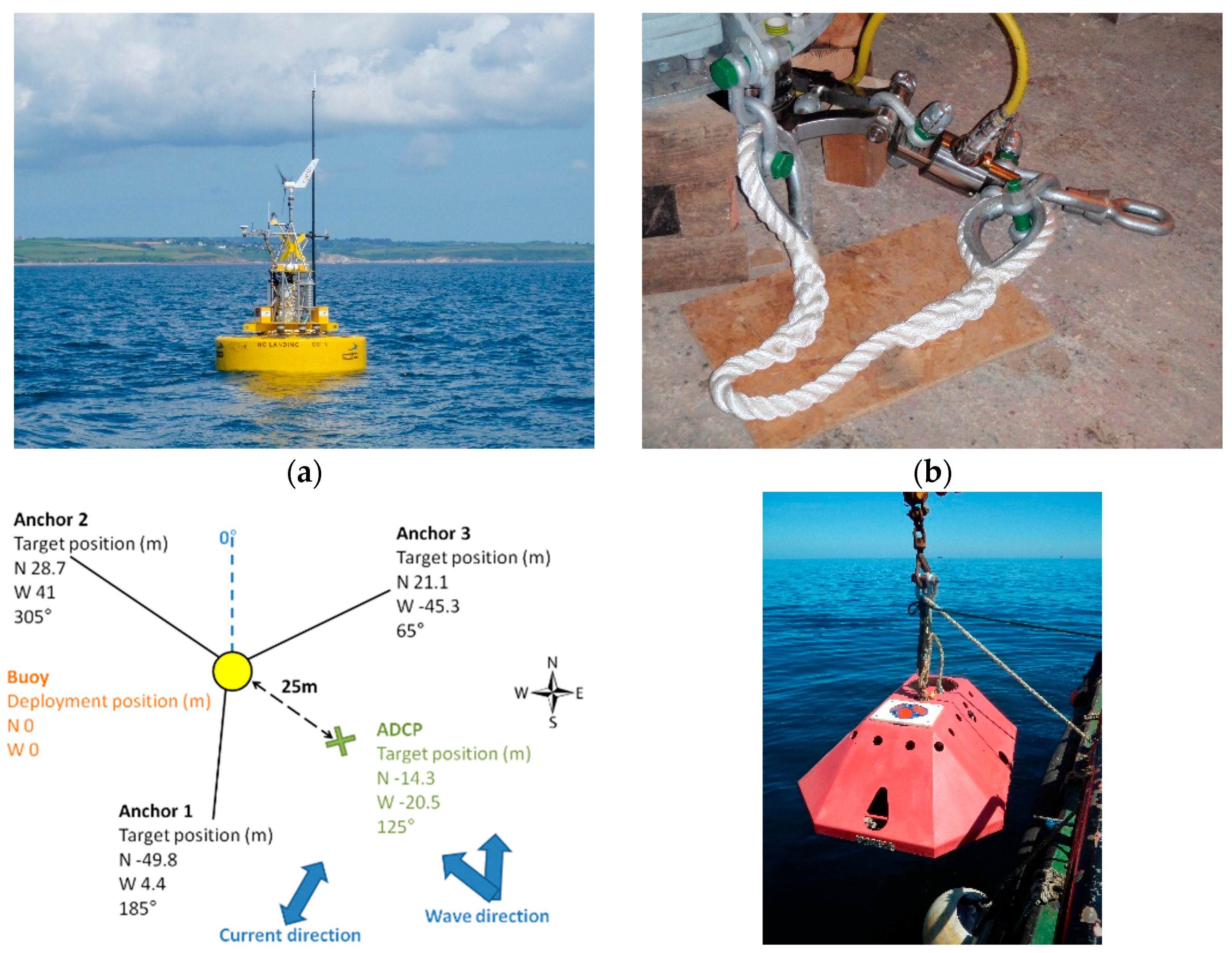
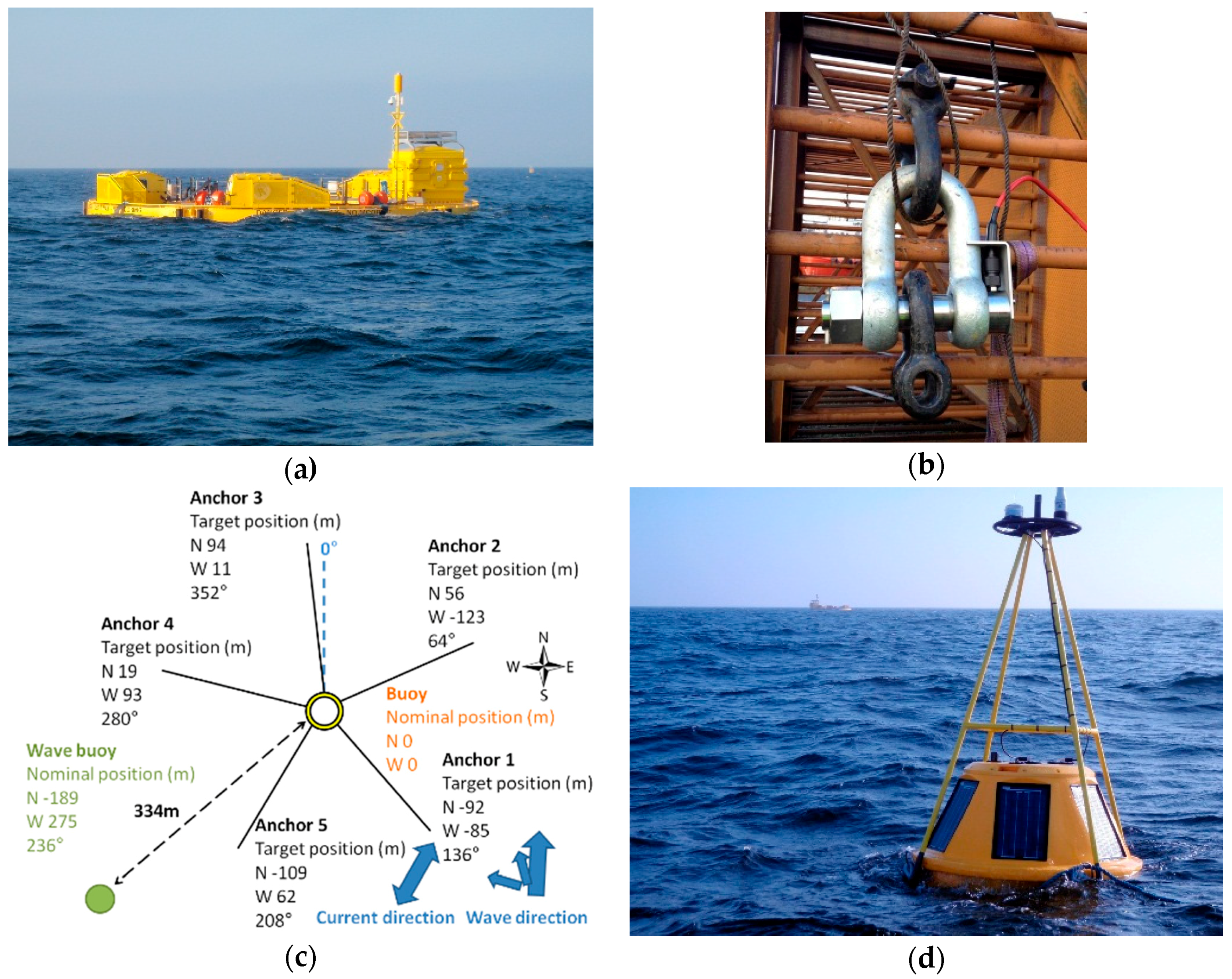
During the deployment, time series of mooring load data were measured with inline load cells at 20 Hz (SWMTF) and 200 Hz (Bolt-2 Lifesaver). The processing of mooring load data started with a quality check applied on the mooring load data assessing possible drift or offset for these data, as described by Thies
et al. [
6].
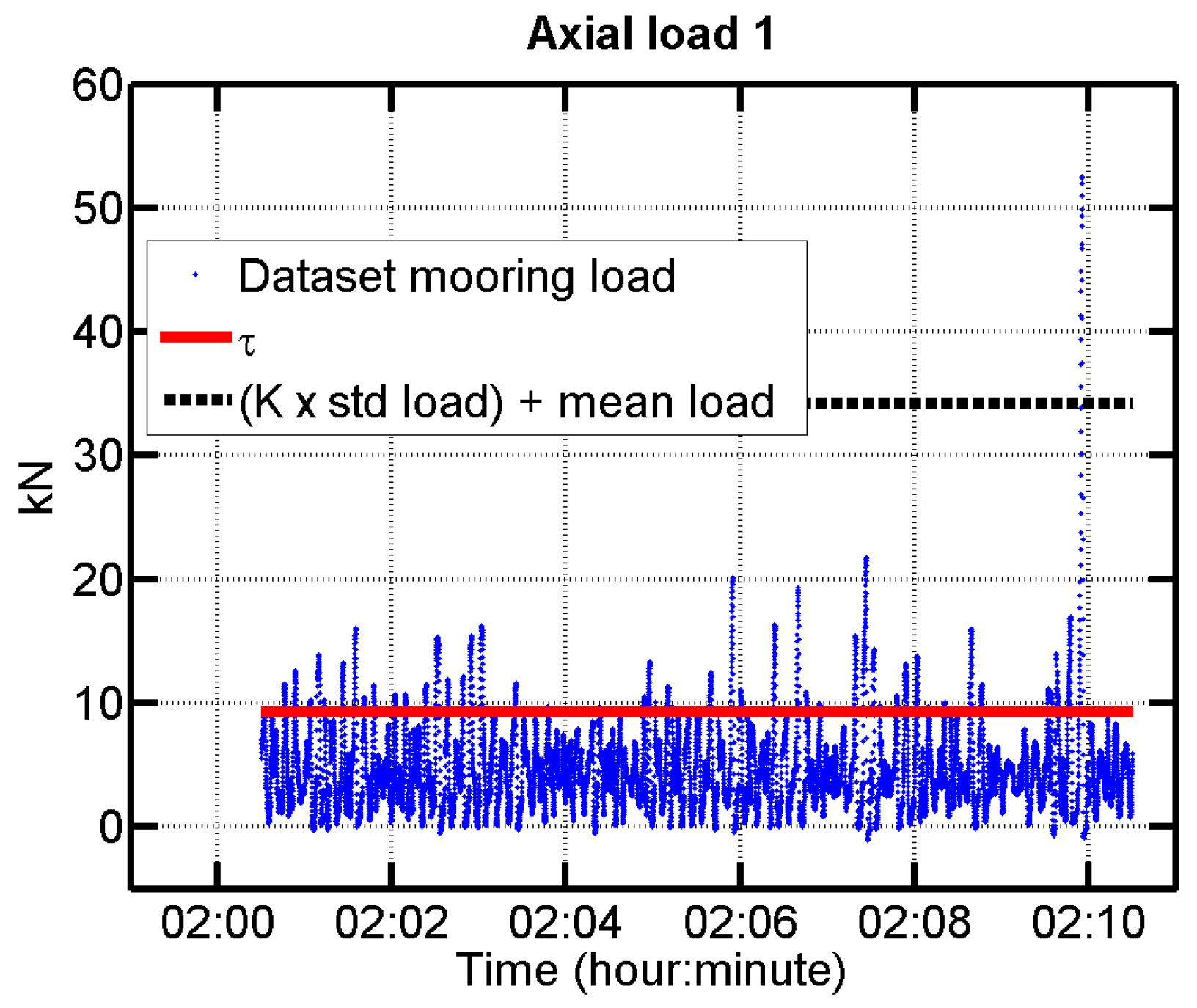
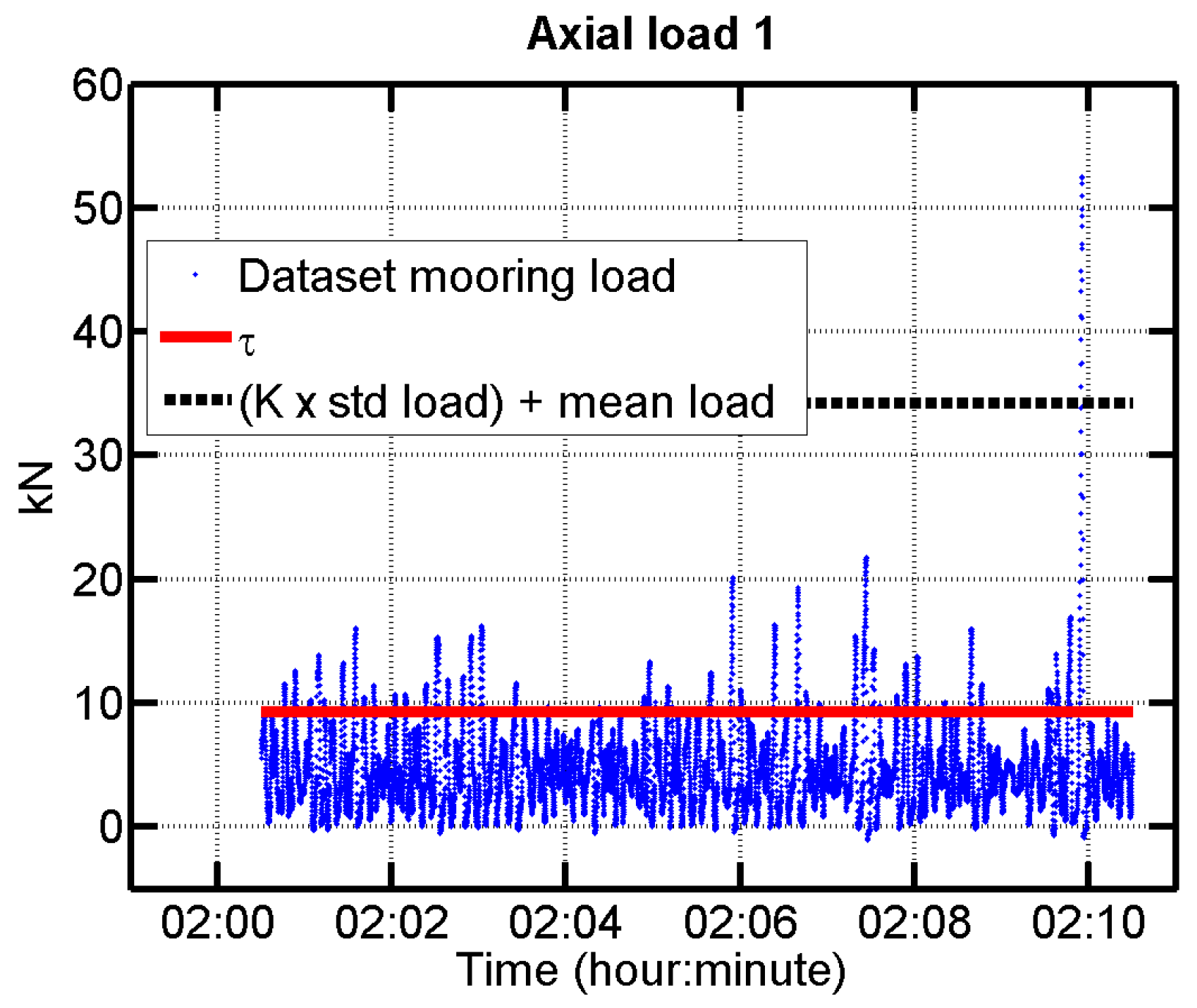
An example of the time series of mooring loads at SWMTF is presented in
Figure 4. A sudden increase in tension to 53 kN is observed between 9 and 10 min, and the standard deviation of the load is large during the whole dataset.
A minimum threshold
τ and a peak mooring load factor
K are introduced to determine if the datasets contain peak mooring loads.
τ is compared to the maximum mooring load of the dataset while
K is compared to the standard score of the maximum
Smax of the dataset. The minimum threshold
τ is used to identify mooring loads with a sufficiently large amplitude, while the peak mooring load factor
K is introduced to isolate datasets containing sharp mooring loads.
K basically checks that the peak load is the result of a dynamic behaviour and not from an increase in load due to slow second order motion. The calculation of the standard score of the maximum (Equation (1)) gives the difference between the maximum and the mean per unit standard deviation and allows the comparison of: (i) the dynamic part of the load (the amplitude of the maximum mooring load minus the mean mooring load); and (ii) of the spreading of the mooring loads in the selected dataset.
x is the dataset of the mooring load,
Smax the standard score of the maximum,
the mean of
x and
the standard deviation of
x.An increase in load due to slow second order motion would result in an increase in the standard deviation of mooring load and a decrease in the standard score of the maximum mooring load.
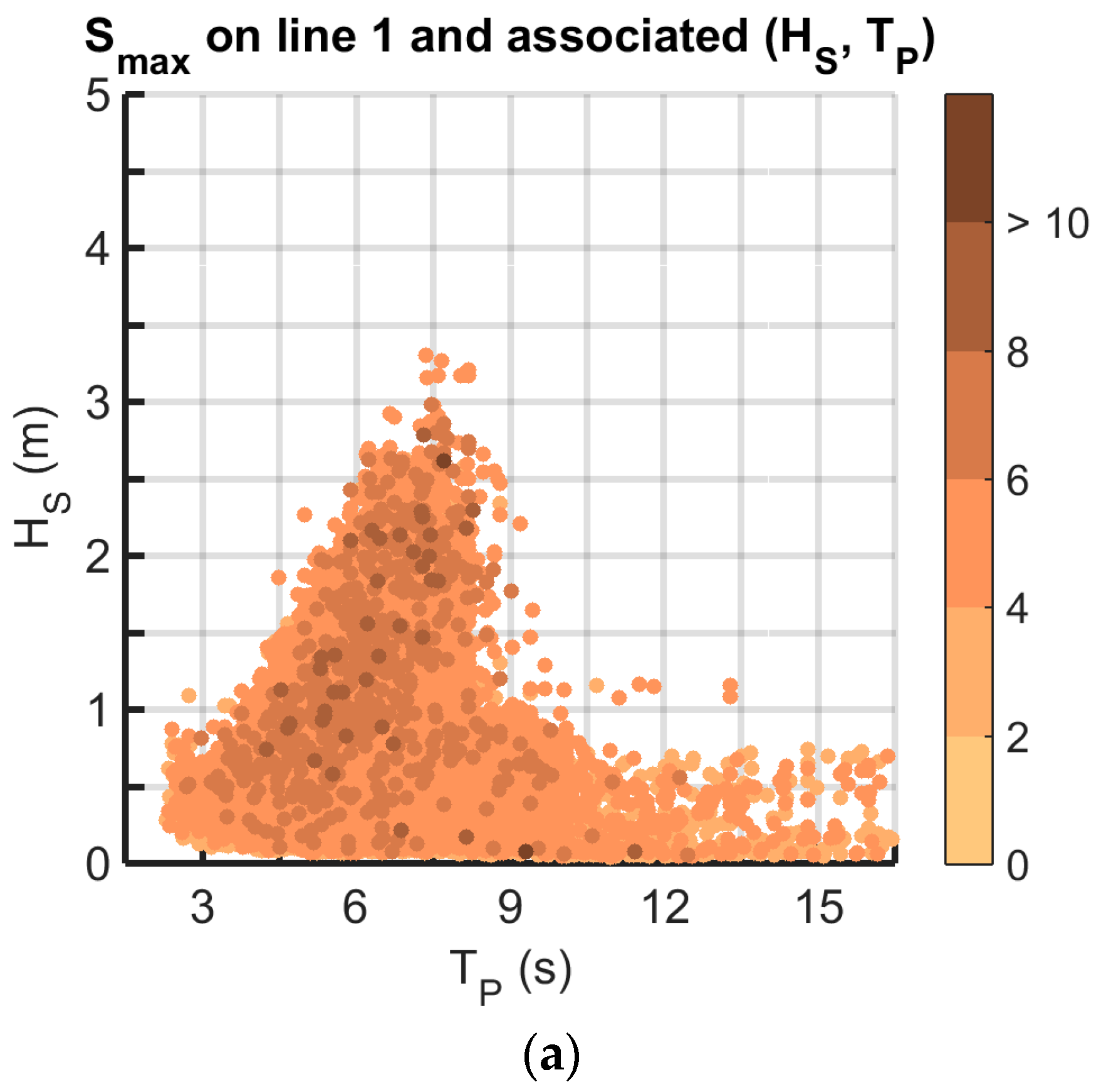
Smax assesses the non-linearity of mooring loads. This non-linearity can be caused by:
Geometric non-linearity that is associated with changes in the shape of the mooring line caused by vertical force components;
Non-linear stretching of synthetic ropes;
Non-linear seabed friction;
Non-linear drag of the mooring line, which may cause snap loads.
The larger the
K and
τ values, the less datasets of mooring loads are identified as containing peak mooring loads, as shown in the example in
Table 5. This example shows which percentage of datasets is defined as containing peak mooring loads on mooring line 1 at SWMTF. For example, if
τ is set to 0 kN and
K to zero, this means that all datasets are defined as containing peak mooring loads. If
τ is set to 10 kN and
K to 7.5, this means that 0.27% of the datasets are defined as containing peak mooring loads. A mooring system with a high number of mooring lines or in a calm environment will be less likely to observe peak mooring loads at a similar mooring load factor and threshold value. As a consequence,
τ and
K have to be chosen depending on the environmental conditions and mooring configuration (in particular, the number of mooring lines and mooring compliance). In addition, the severity of selected peak mooring loads also needs to be defined. For this paper,
τ was chosen equal to three times the overall mean load on all mooring lines at both installations. This value is equal to 9.32 kN at SWMTF and 35.33 kN at the Bolt-2 Lifesaver mooring.
K was chosen equal to 7.5 at both installations. These choices allow the selection of a sufficient number of peak mooring loads for further investigations.
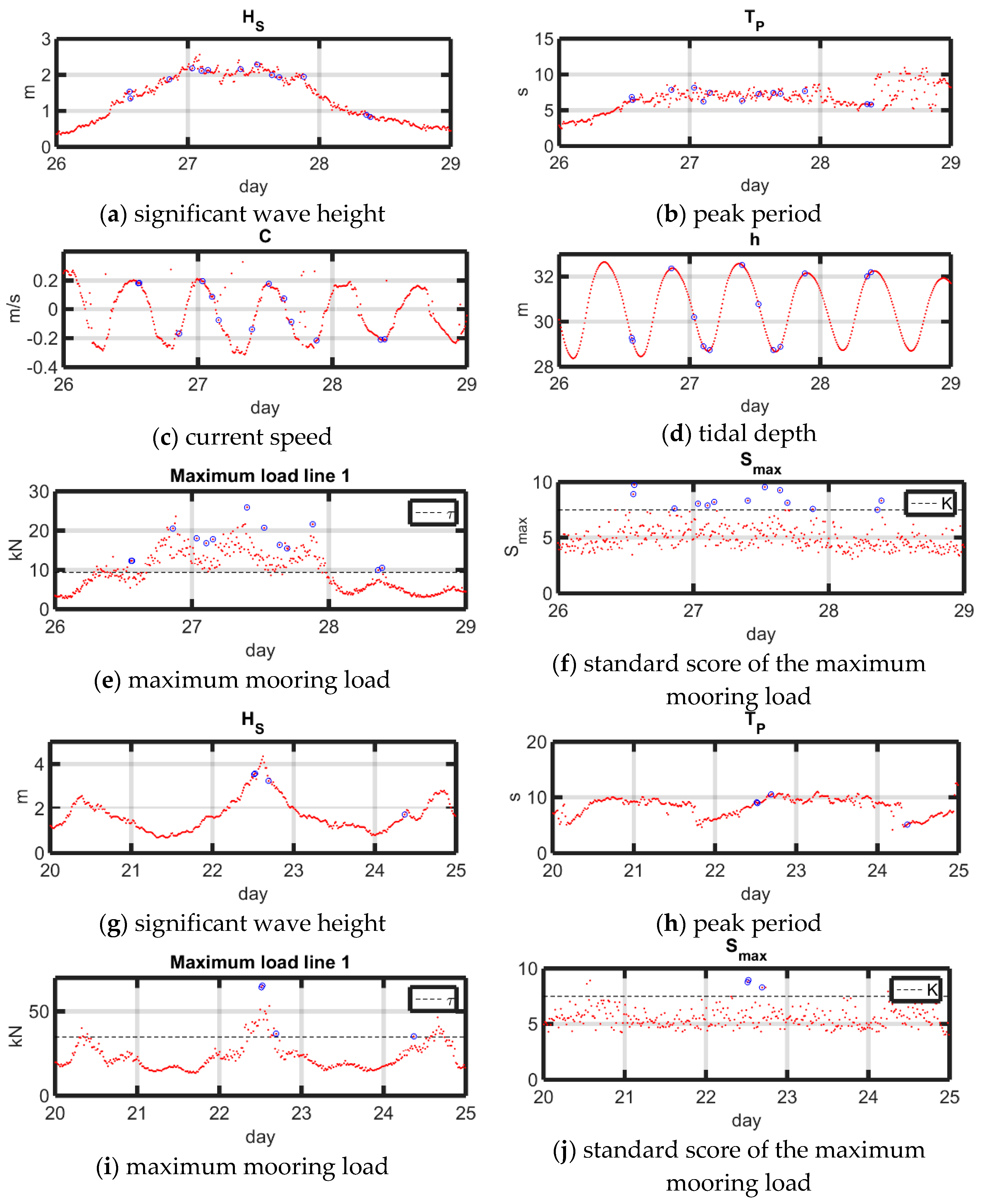
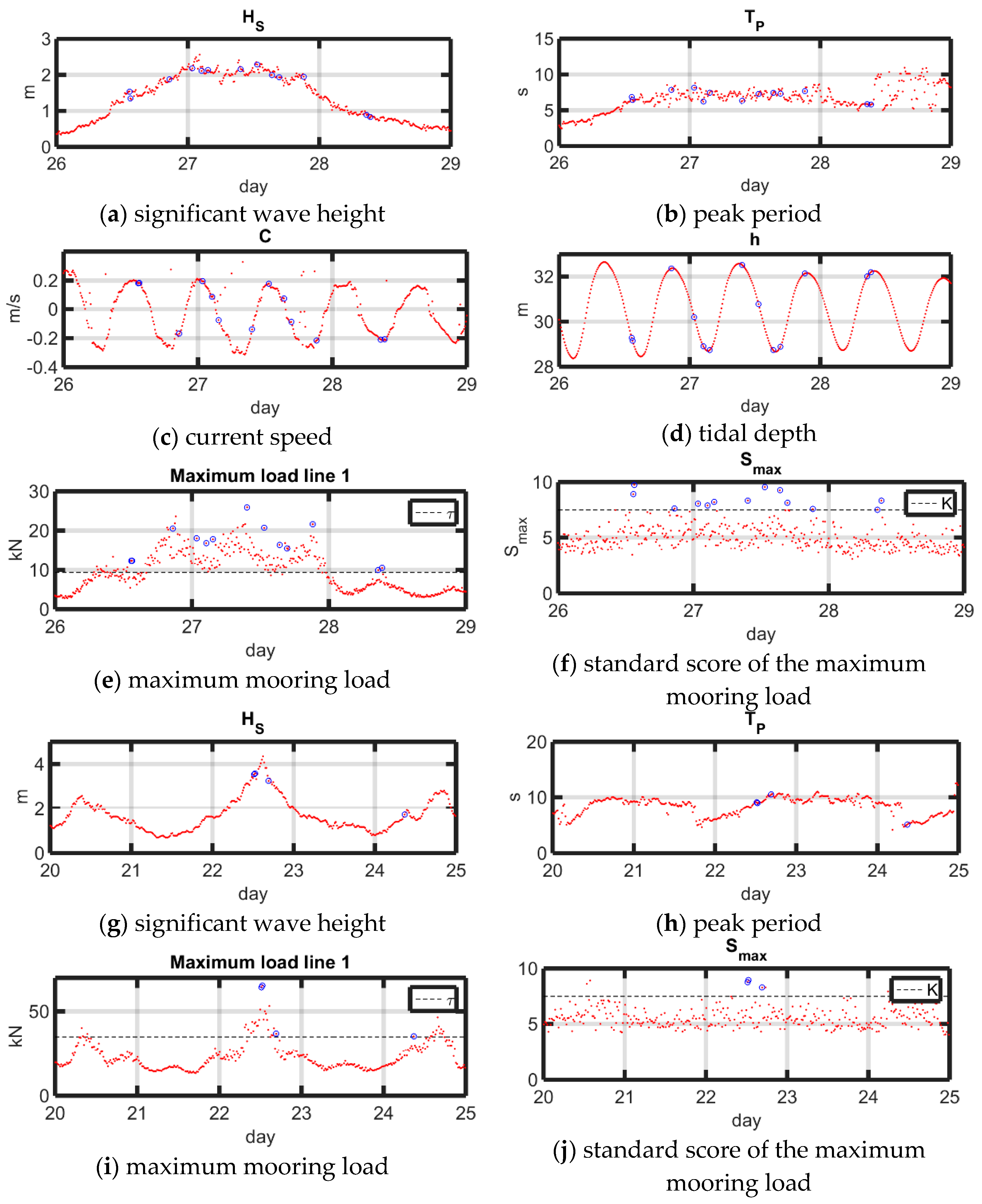
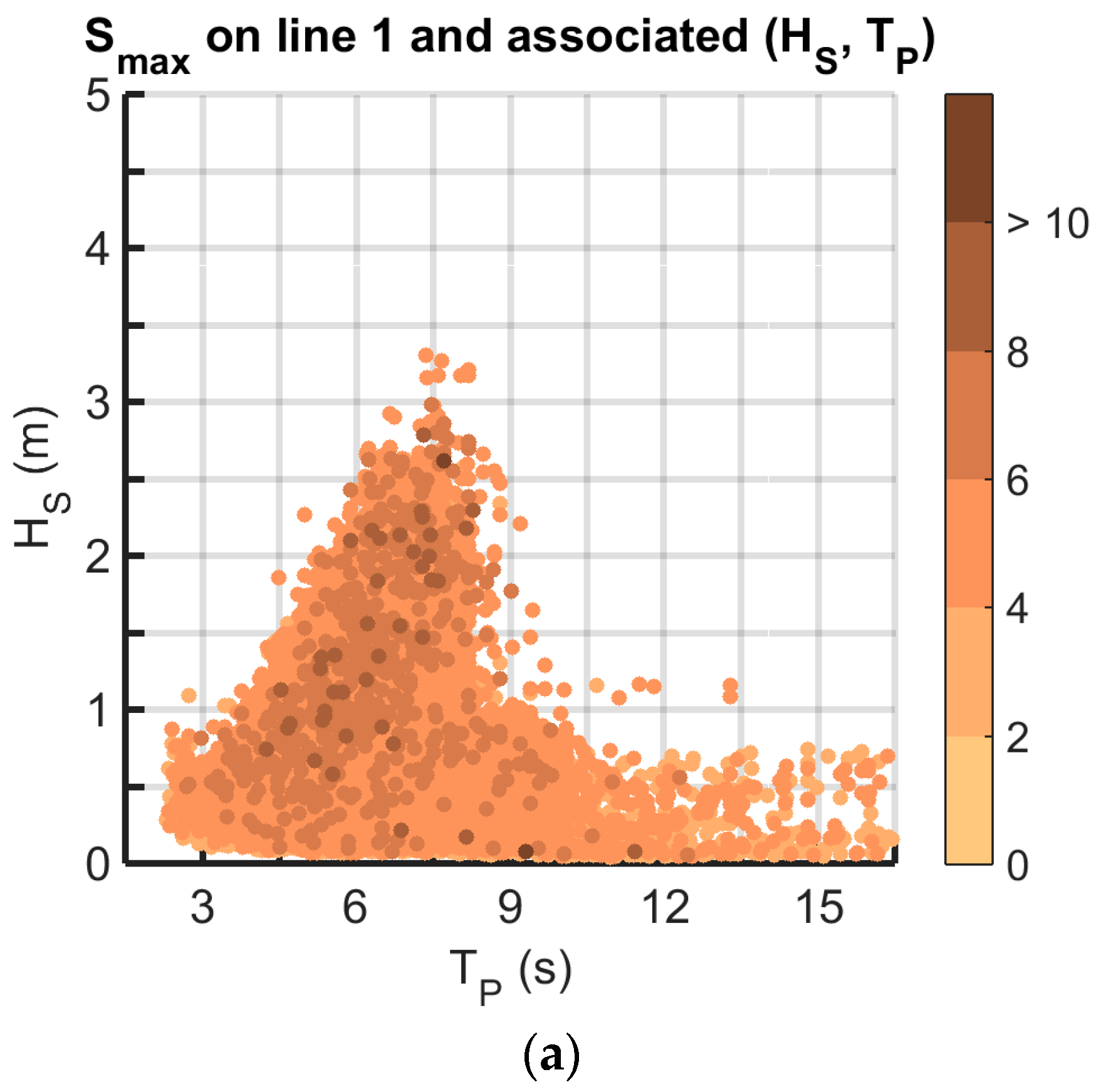
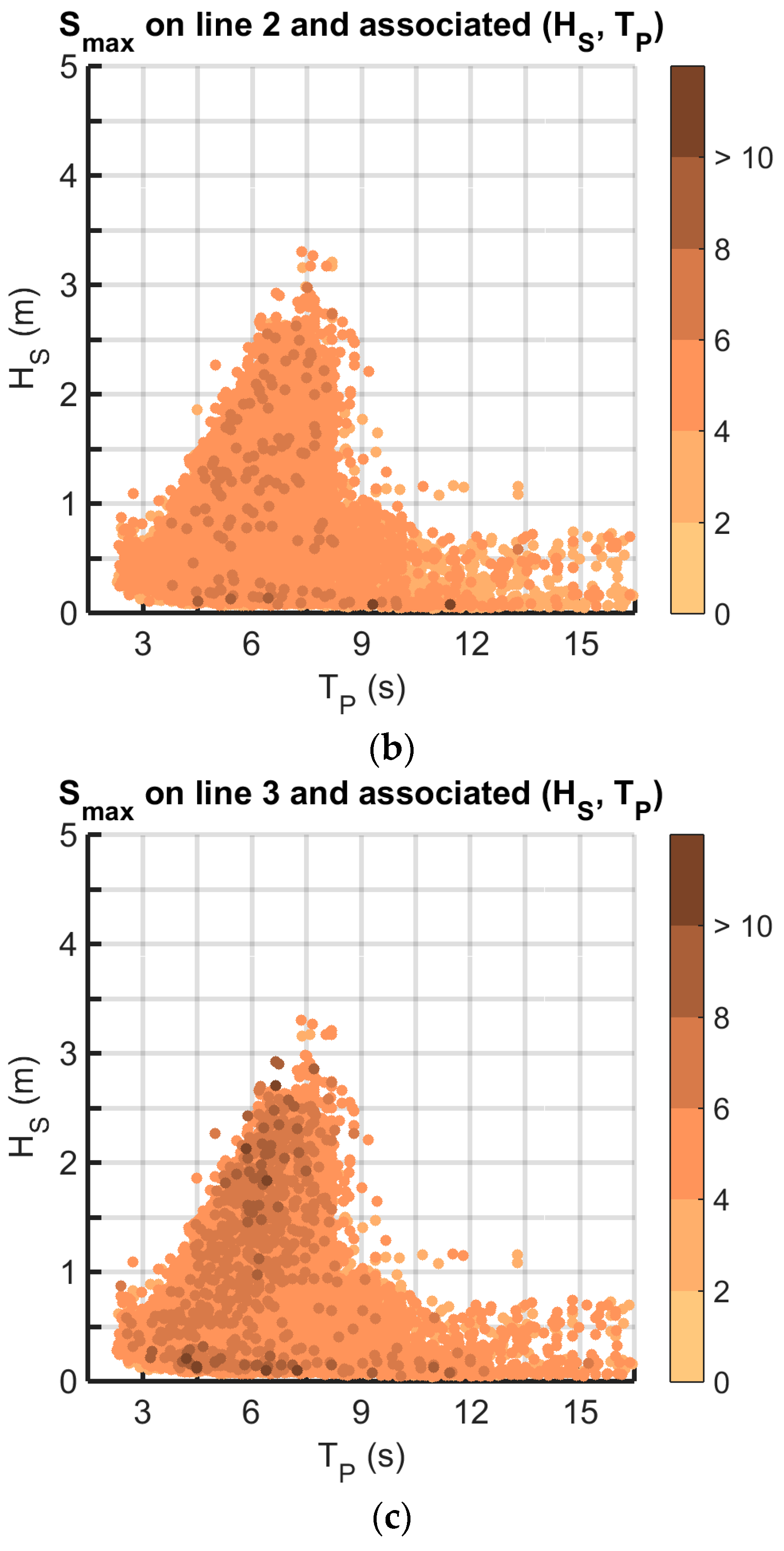
For each dataset of the time series of mooring load and for each mooring line, the standard score of the maximum is calculated and the maximum mooring load is considered.
Figure 5a–f shows an example of the standard score and maximum load at SWMTF on mooring line 1 for several days, as well as the corresponding environmental conditions. Similarly,
Figure 5g–j shows an example of
HS,
TP, maximum load and standard score and maximum load at the Bolt-2 LifeSaver on mooring line 1. In both cases, if the standard score and the maximum value are higher than
K and
τ, respectively, then a peak mooring load is detected and indicated by a blue circle. Additionally, the environmental parameters occurring at this time are recorded. This methodology is repeated on all mooring lines, applying the same mooring load factor
K and threshold value
τ.
6. Discussion
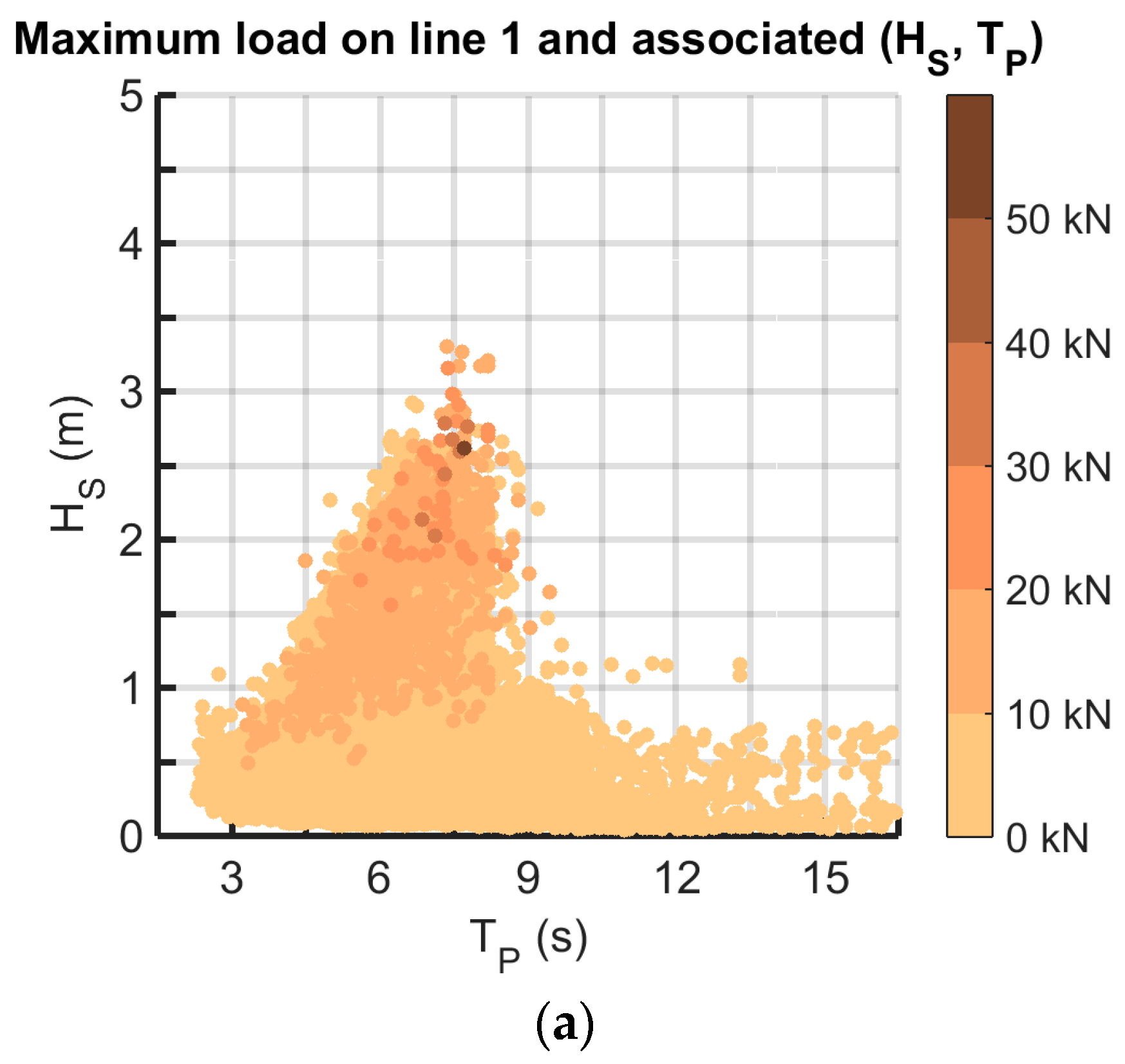
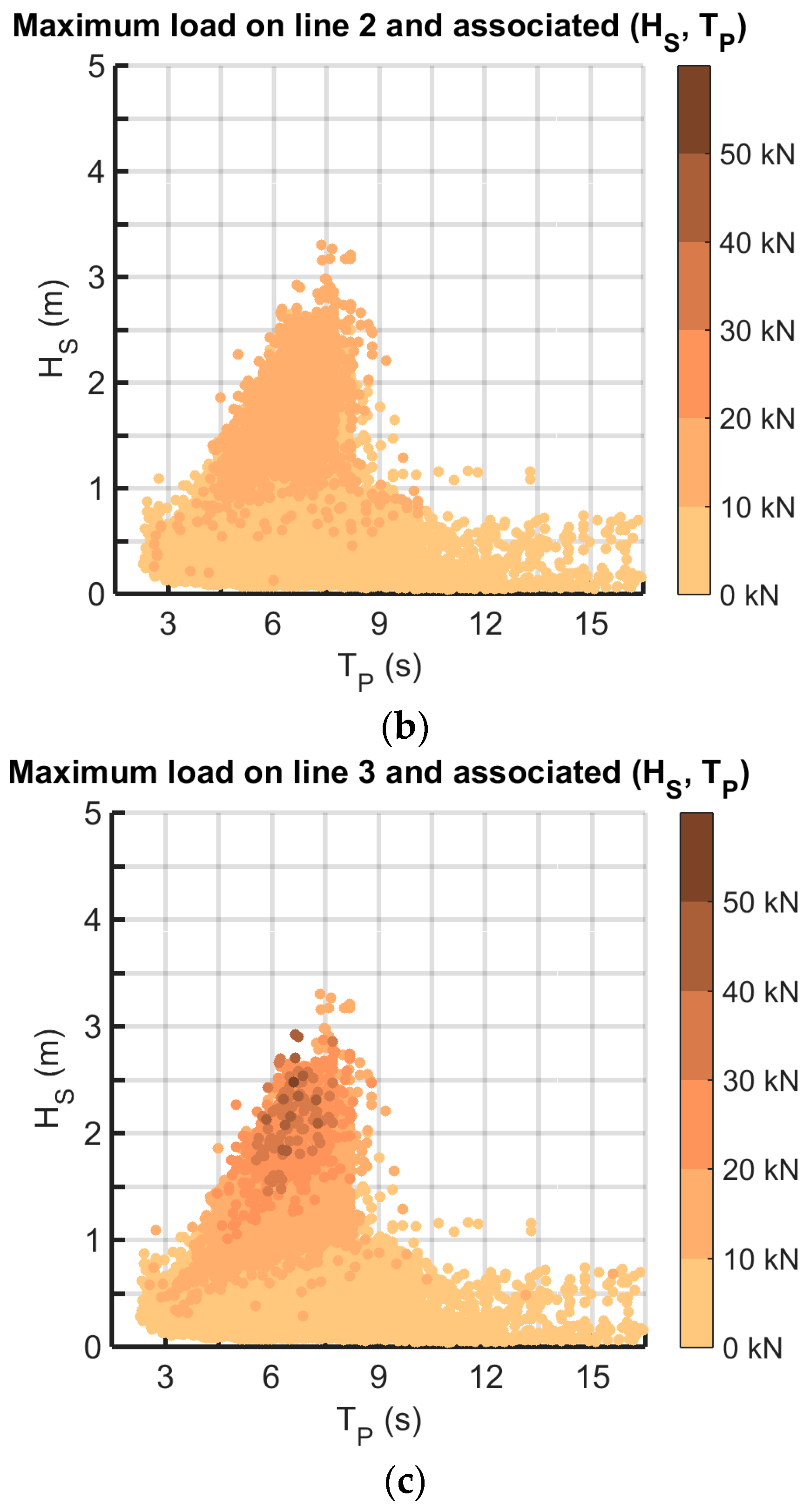
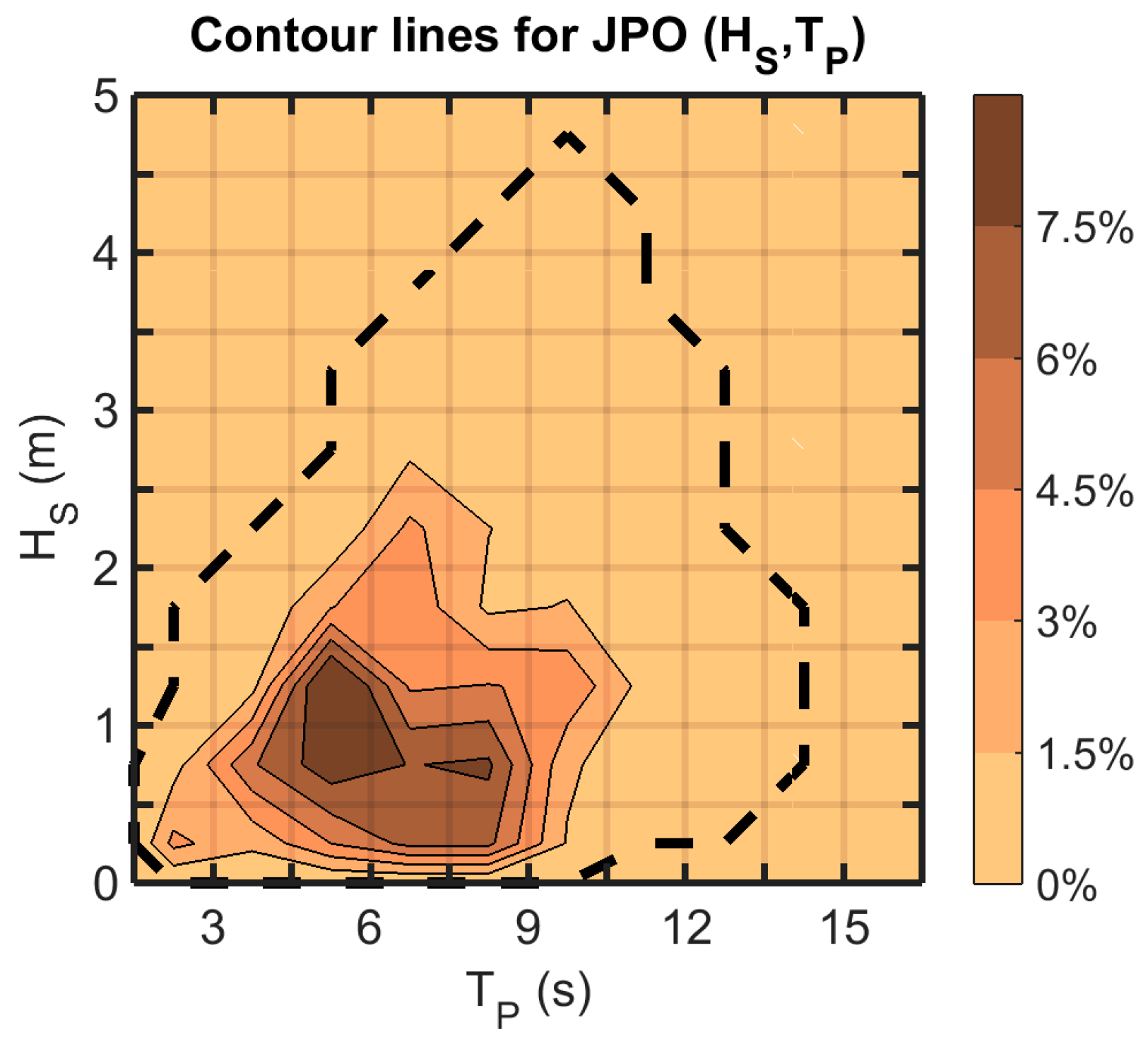
The results have separately described the general environmental conditions measured at the test sites and the environmental conditions that were associated with peak mooring loads.
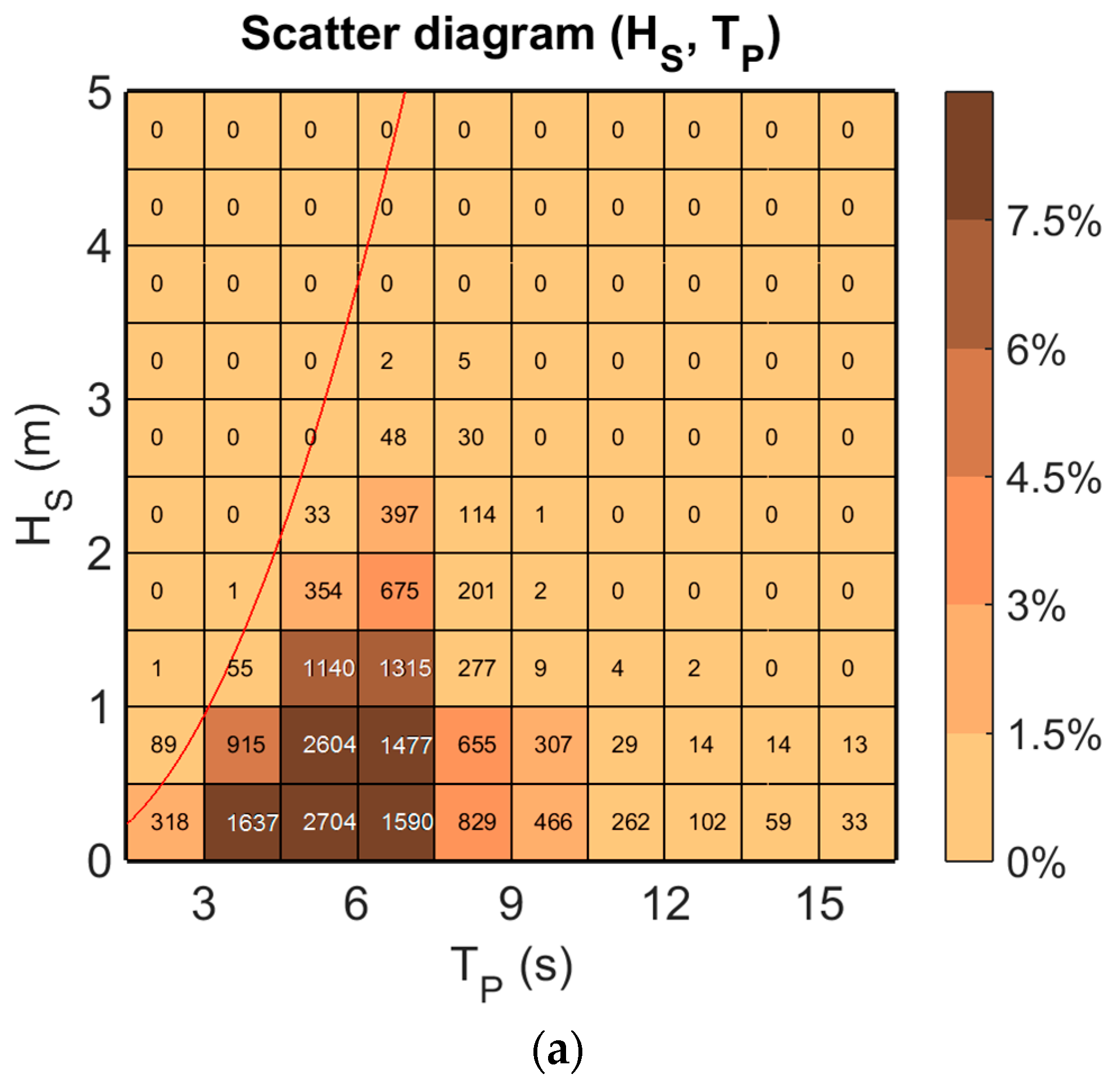
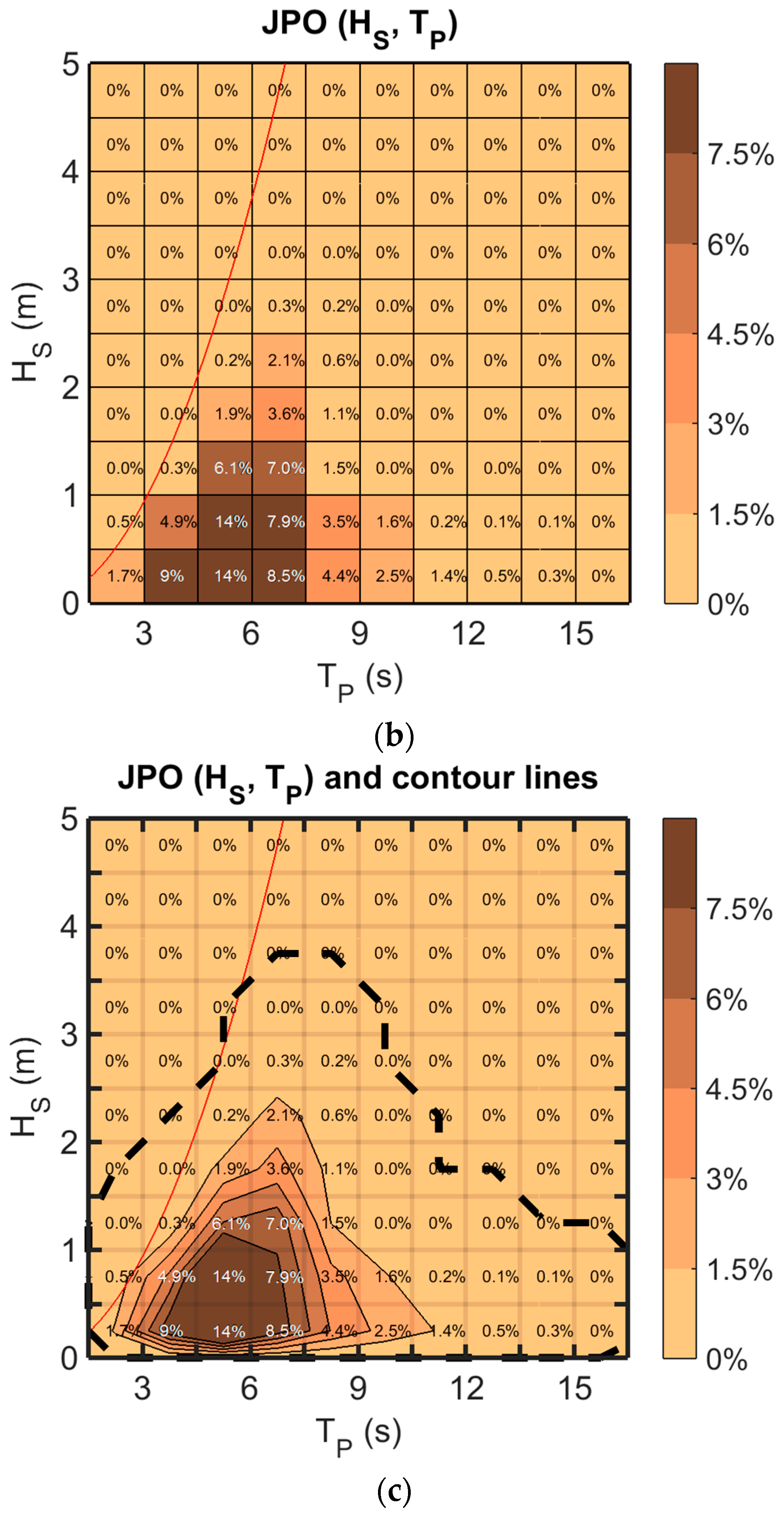
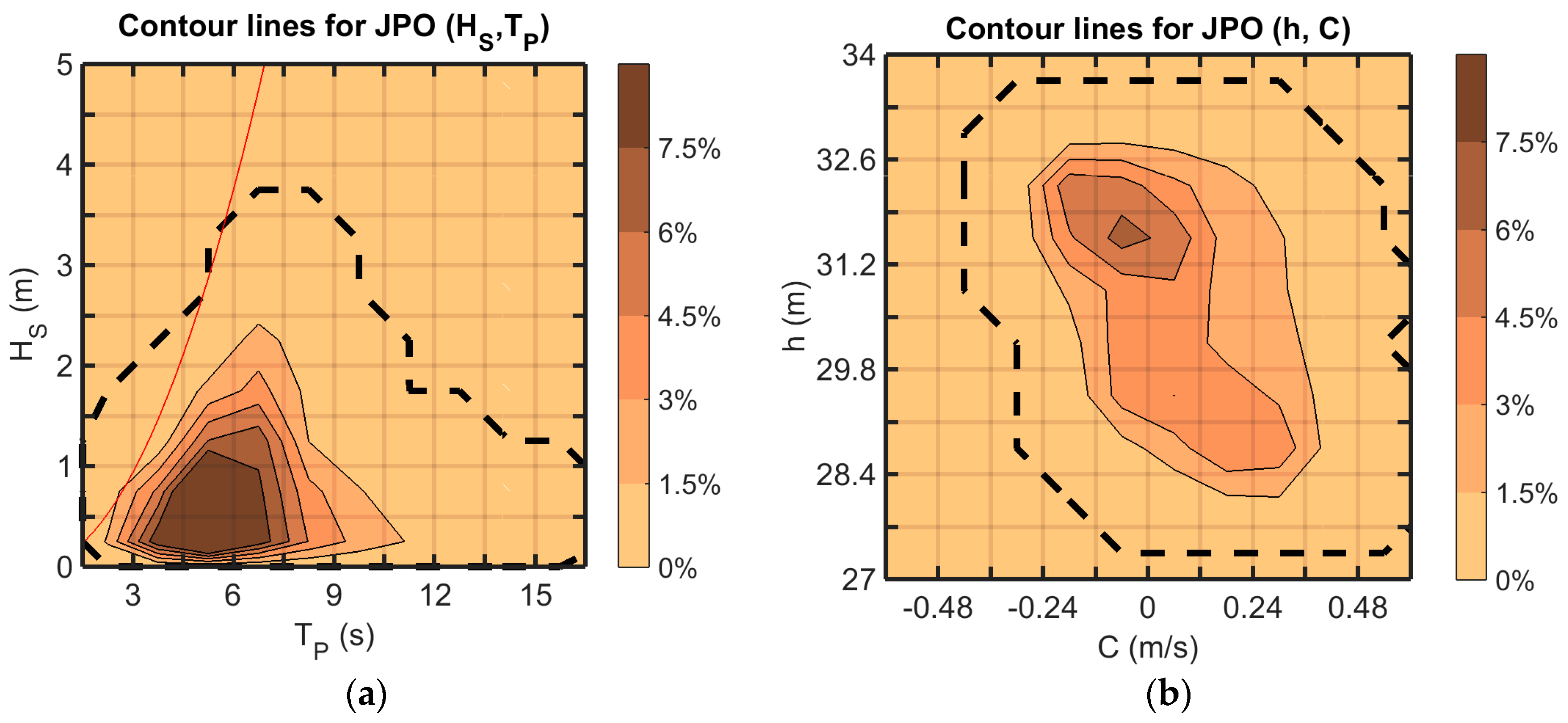
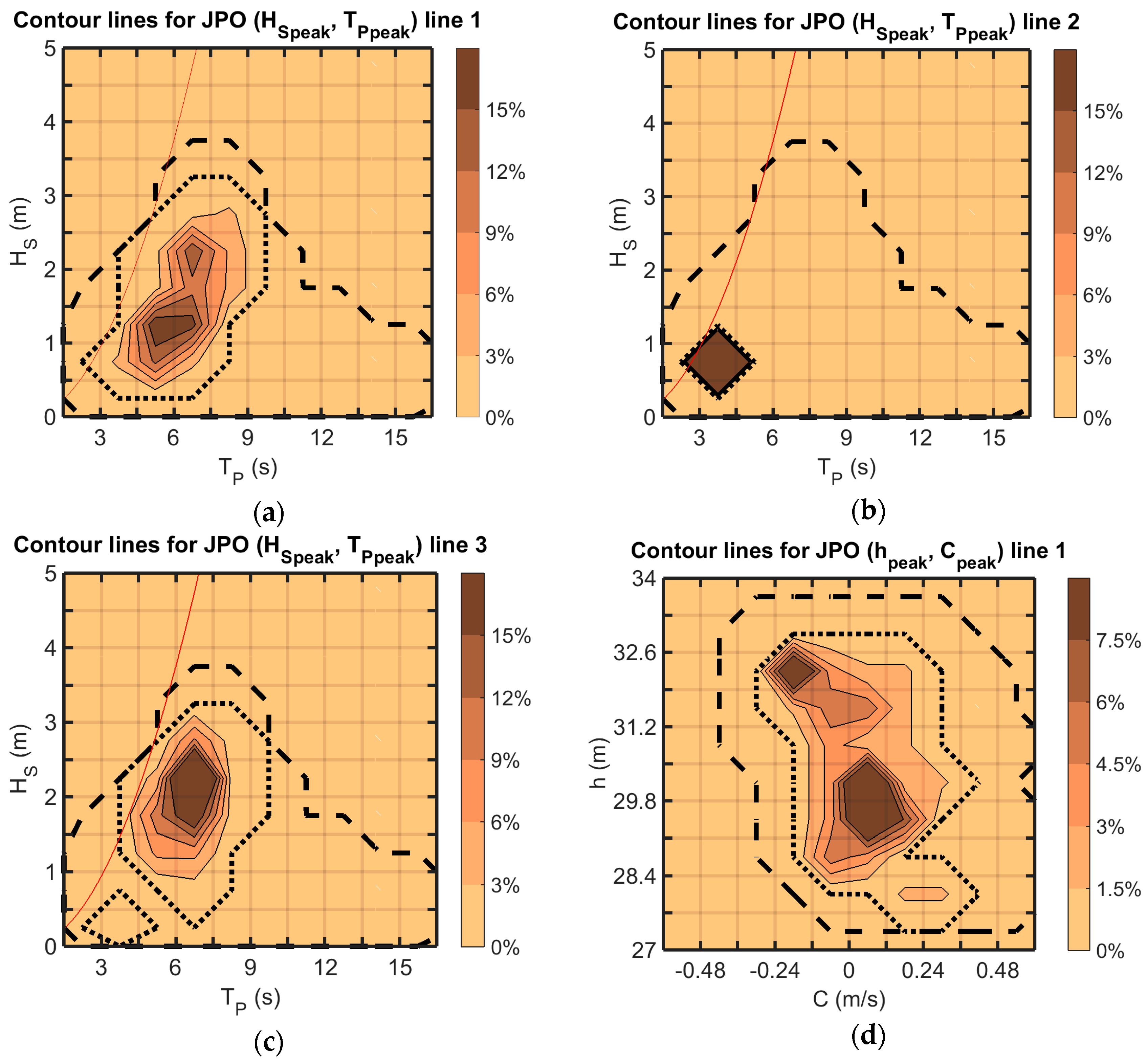
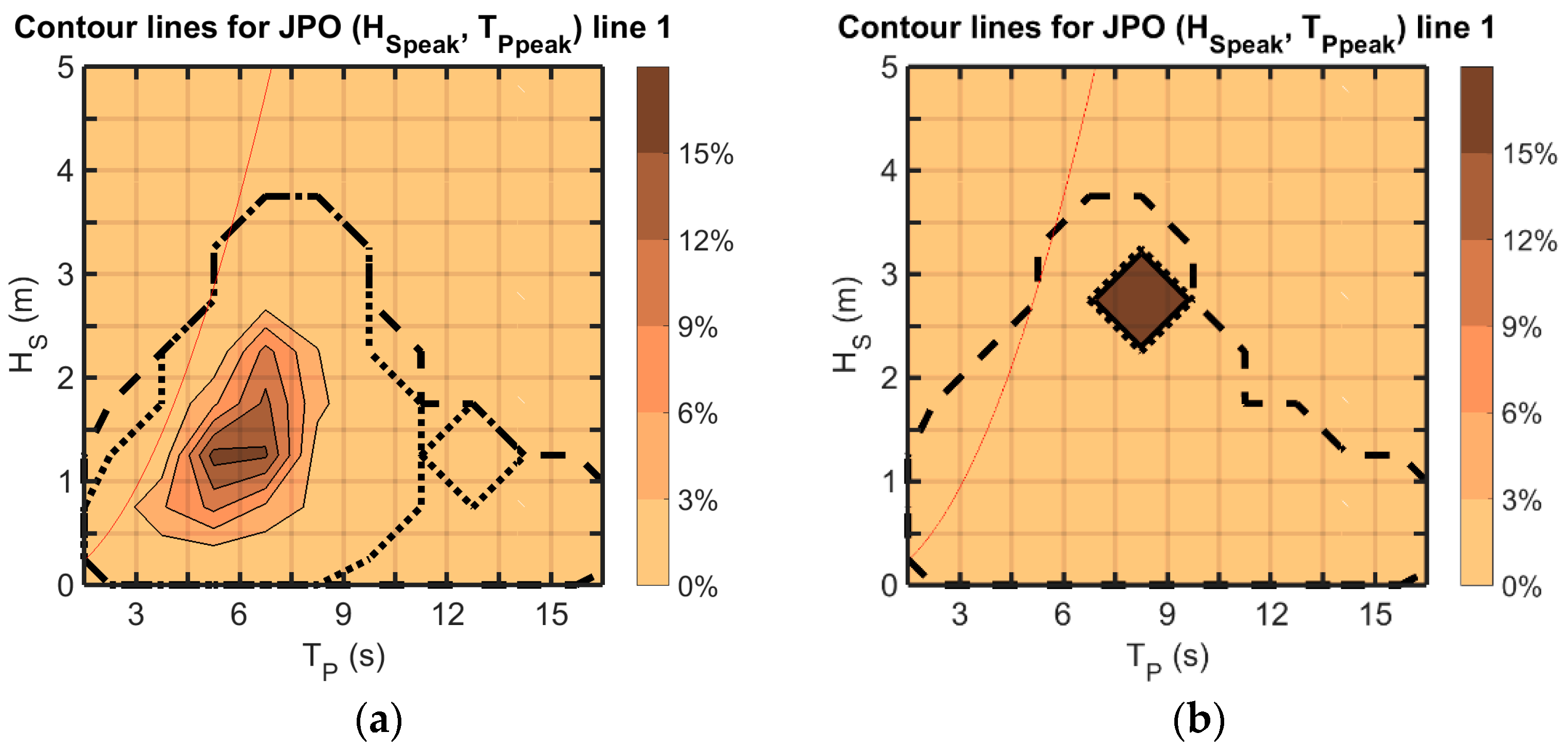
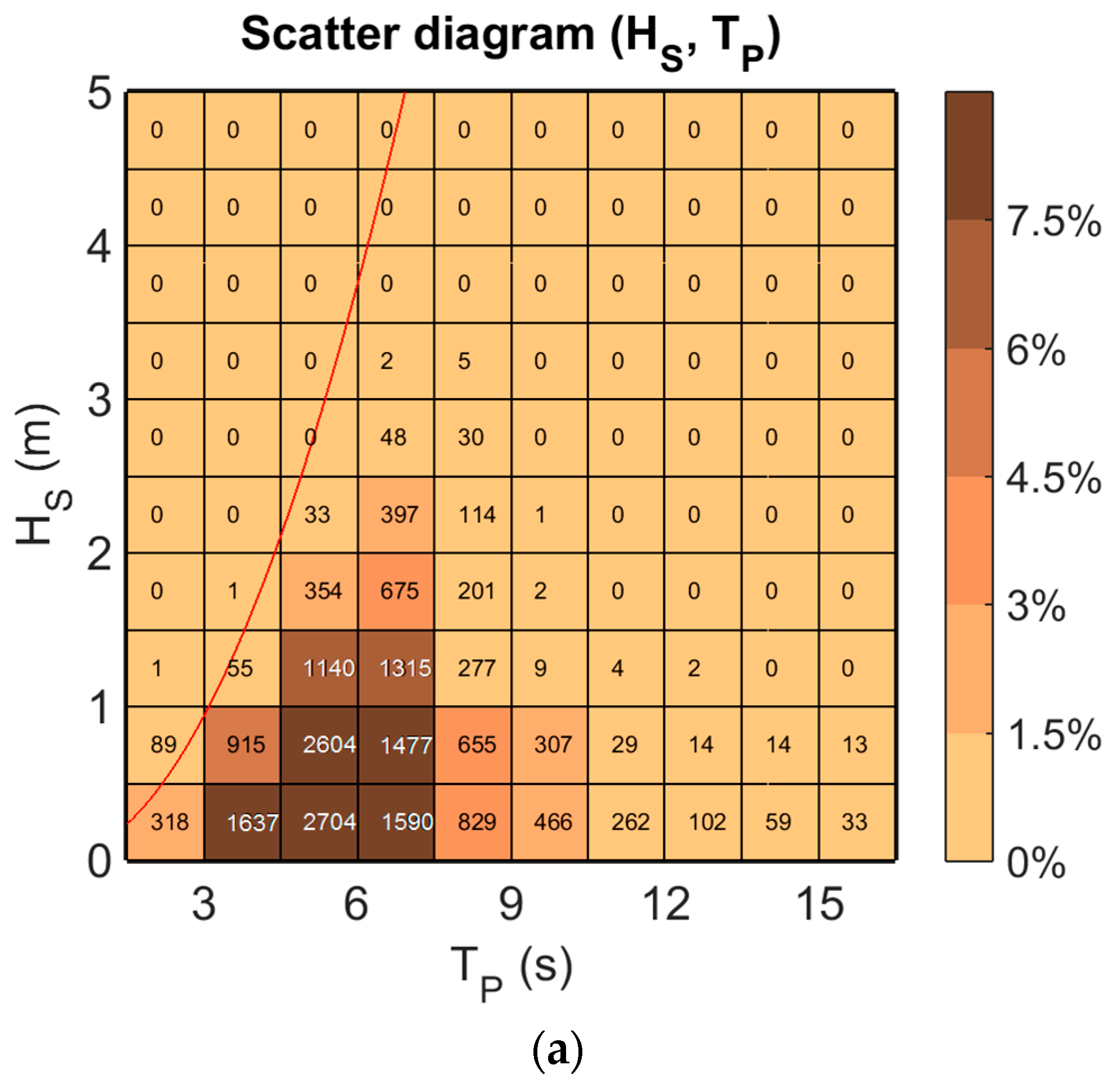
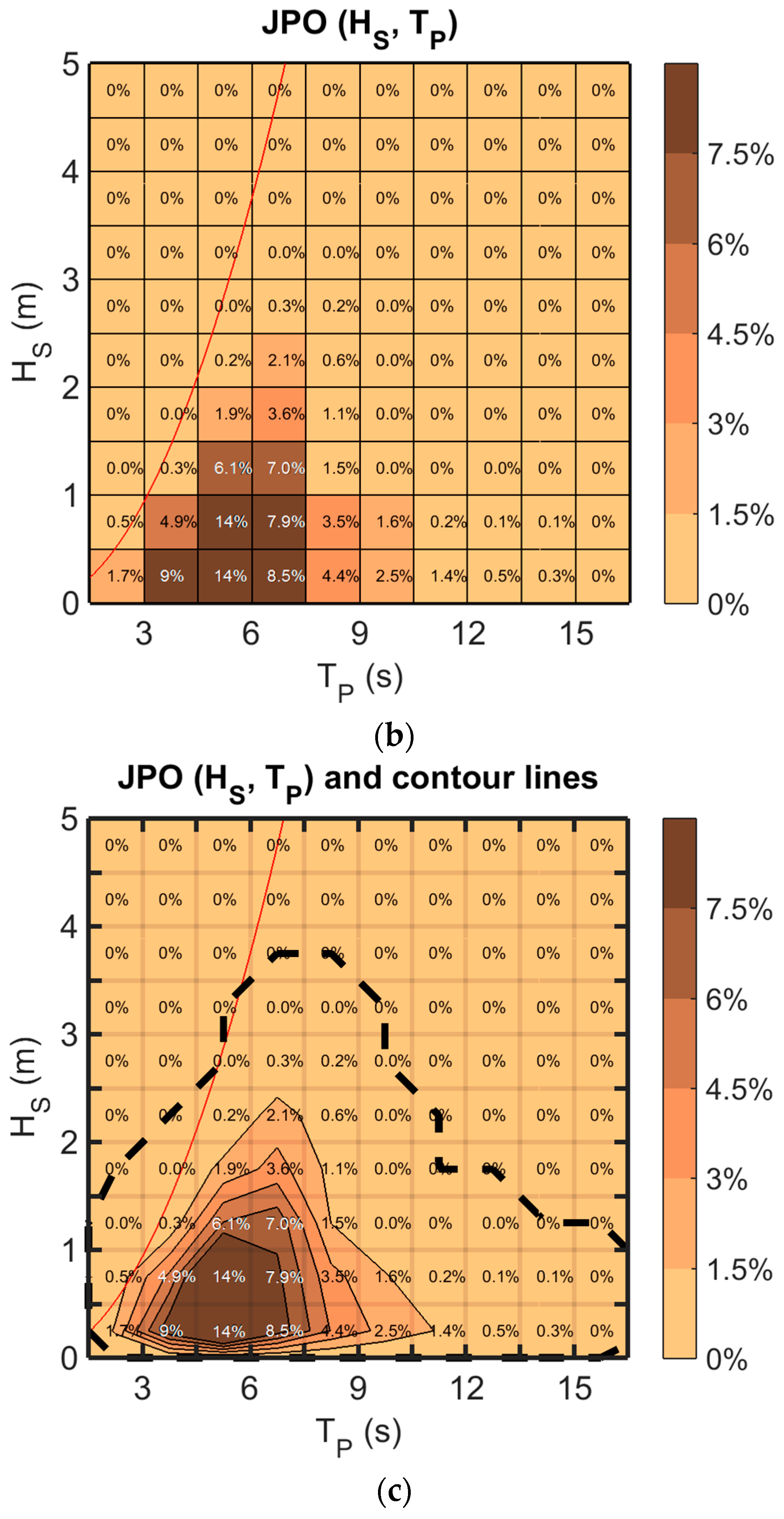
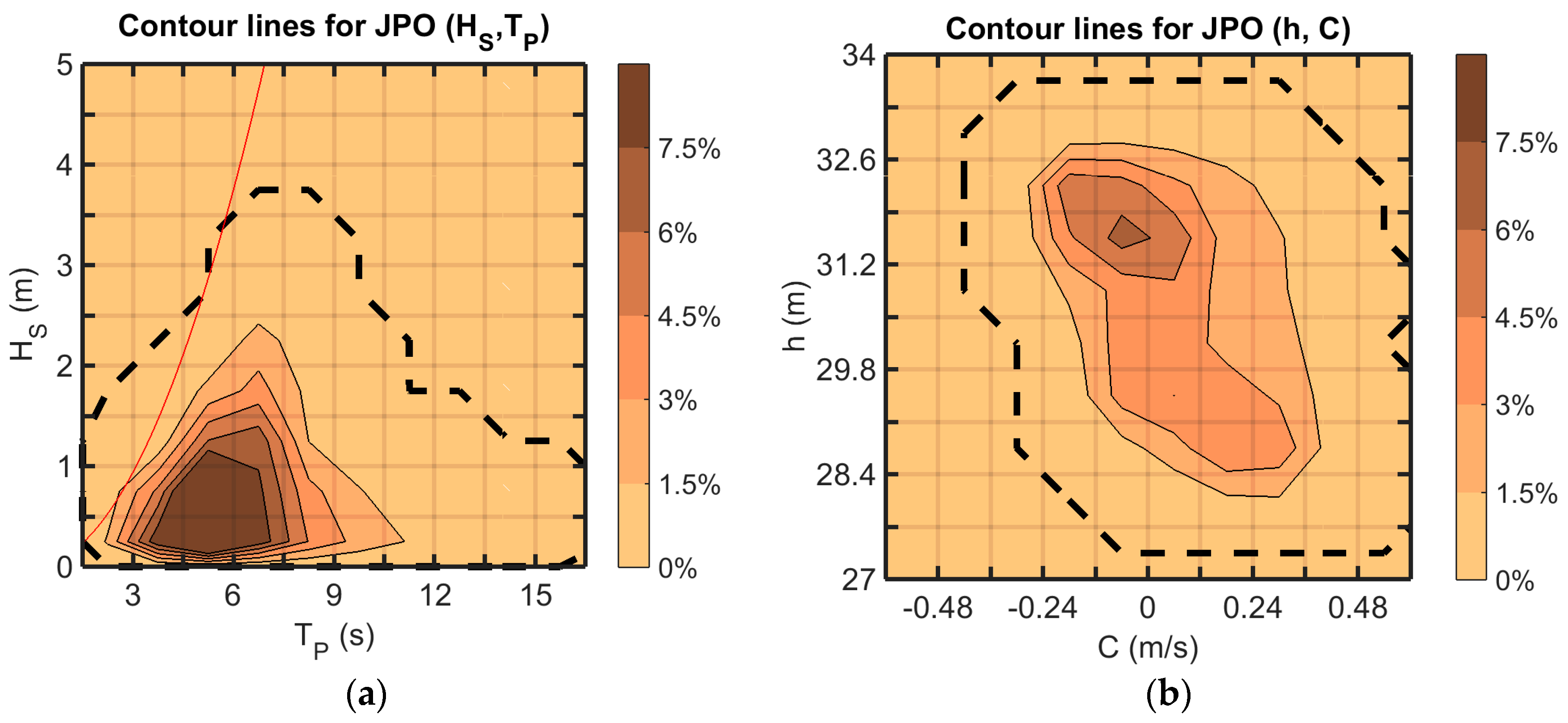
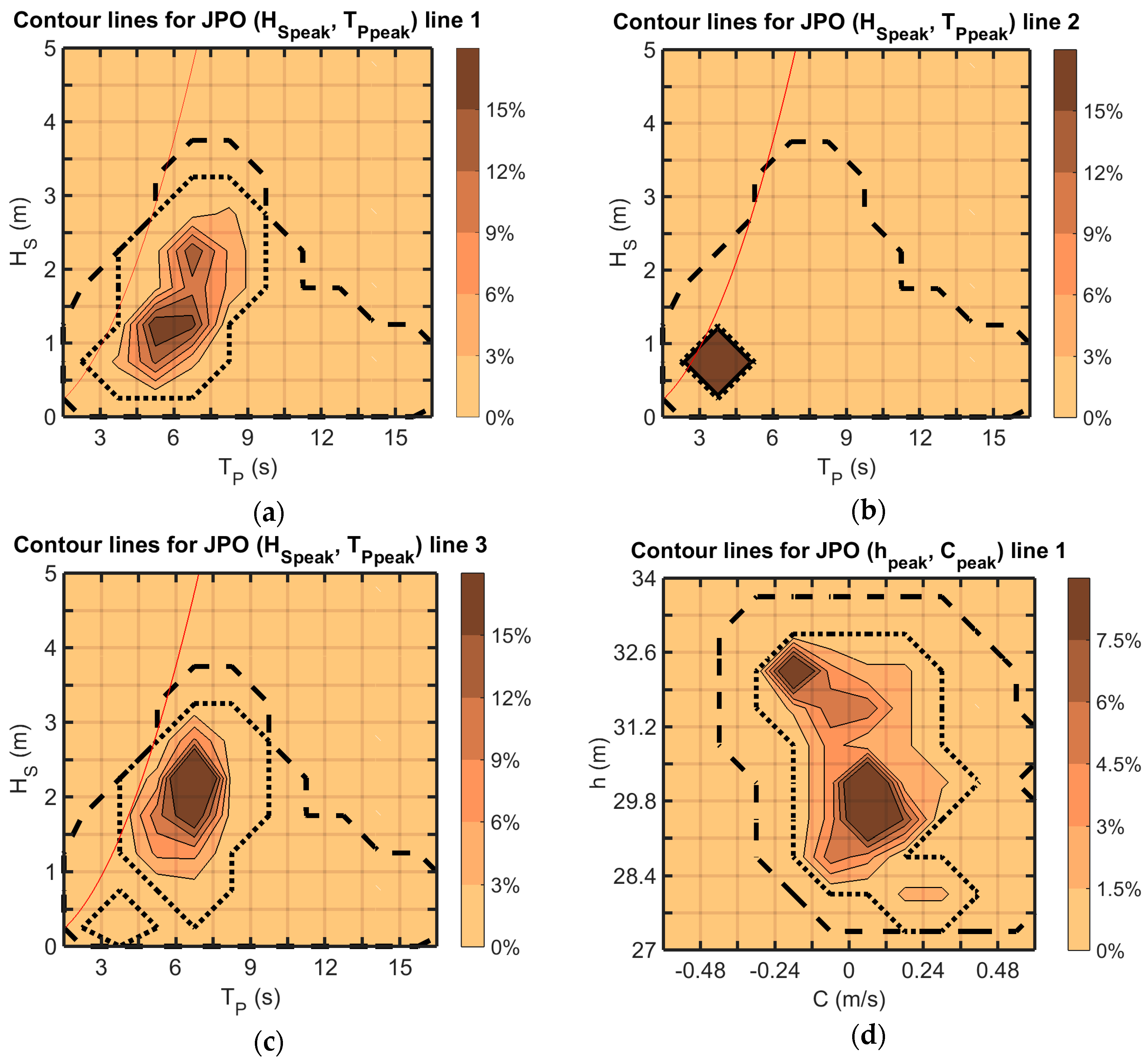
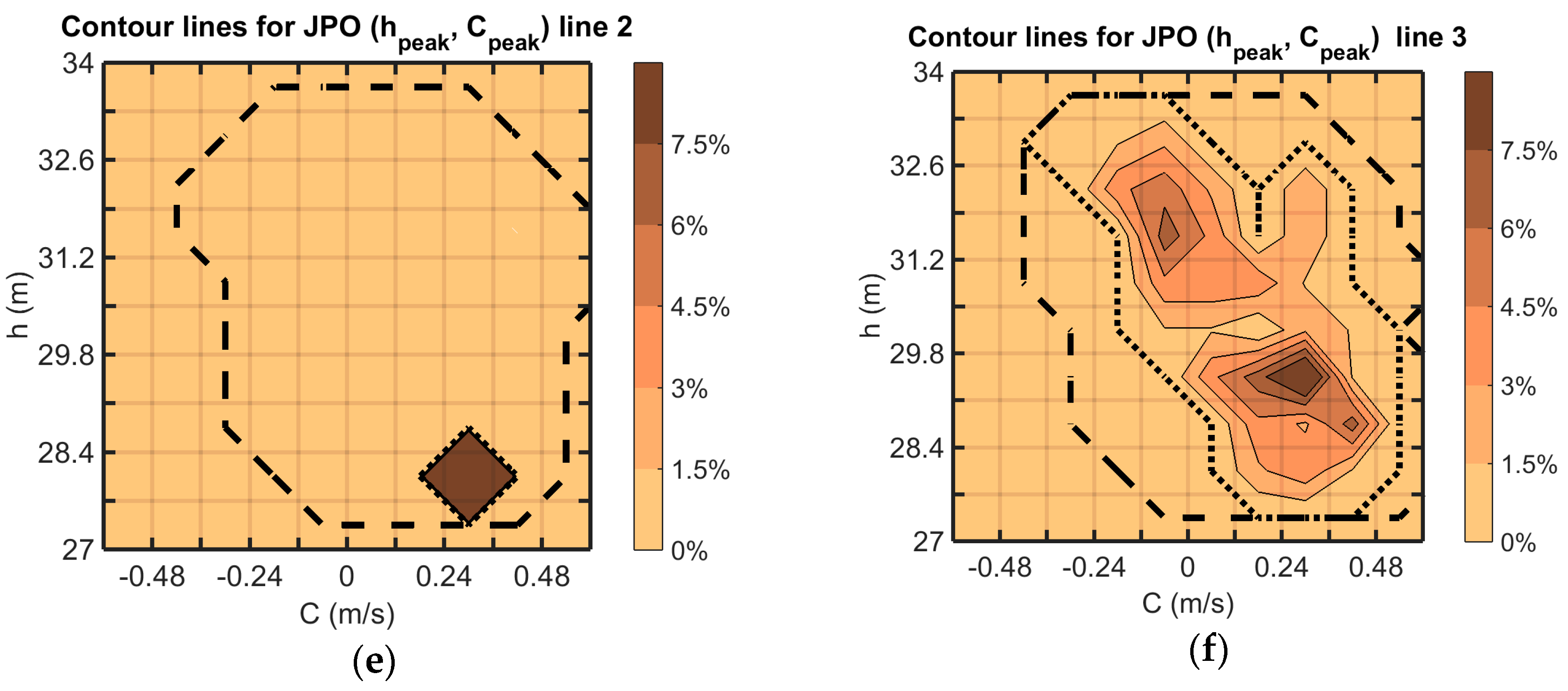
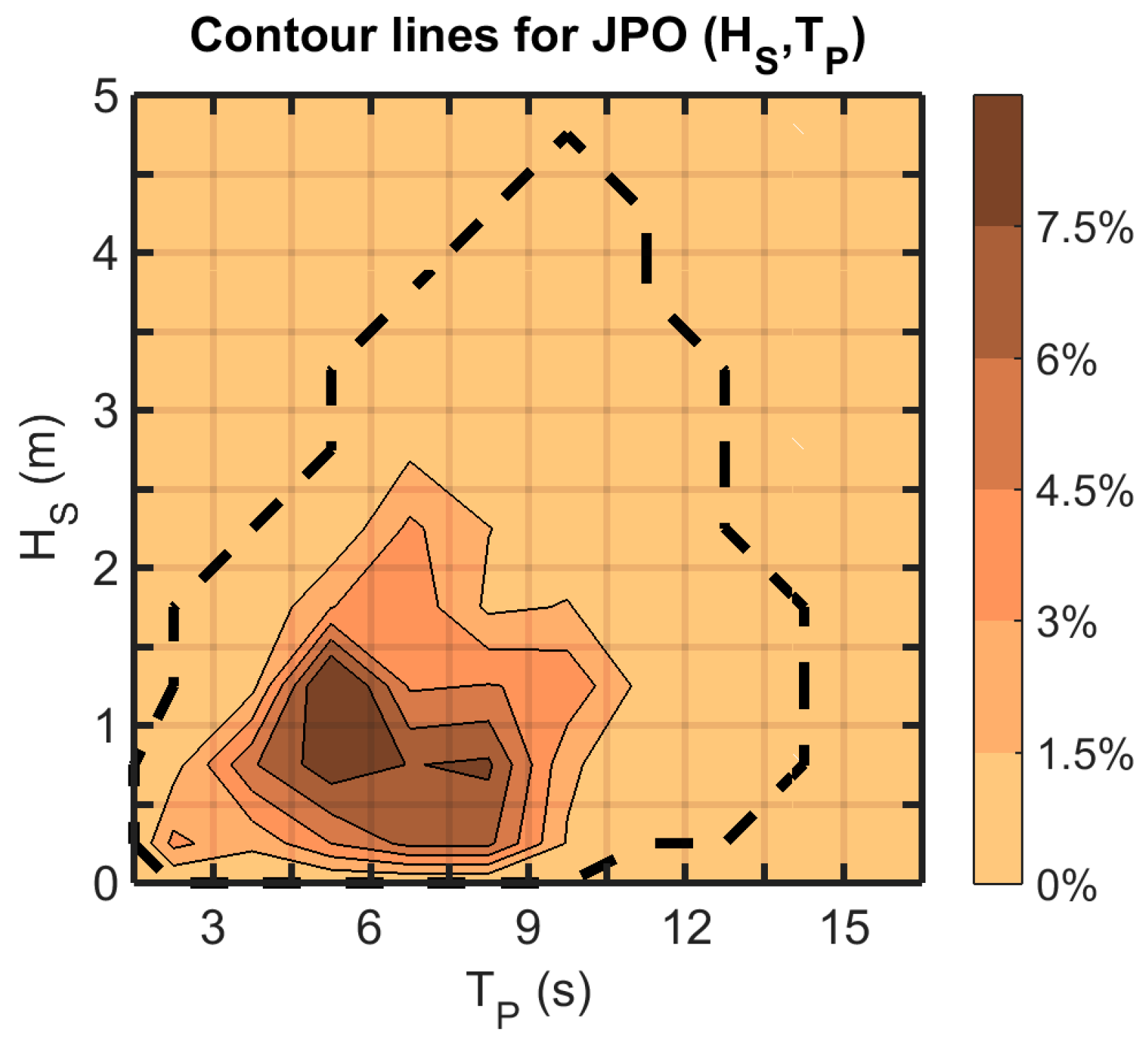
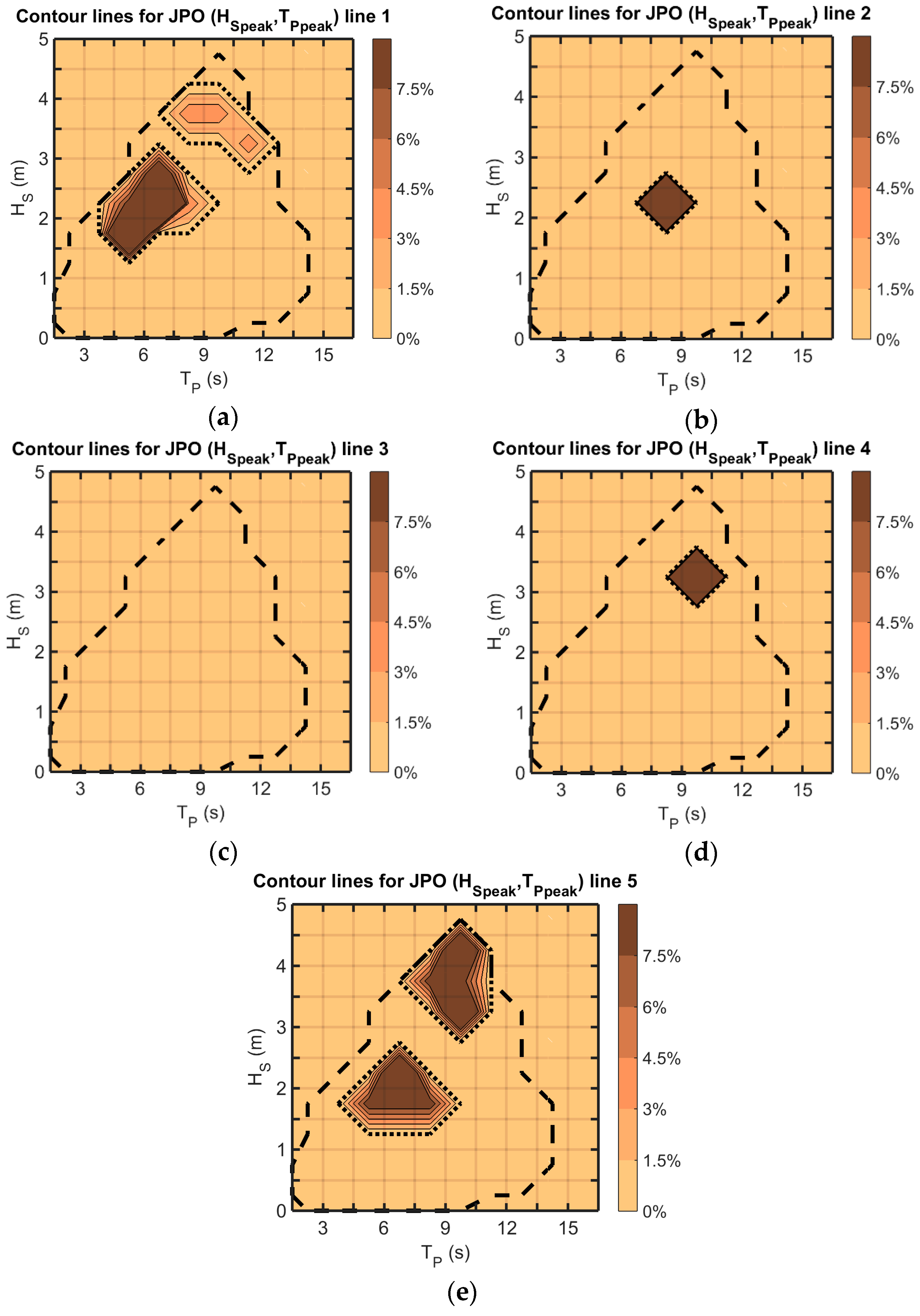
The joint percentage of occurrences of the wave conditions associated with peak mooring loads HS peak and TP peak is compared to the joint percentage of occurrences of the general wave conditions HS and TP. In addition, when available, the joint percentage of occurrences of the tidal conditions associated with peak mooring loads Cpeak and hpeak is compared to the joint percentage of occurrences of the general tidal conditions C and h. These investigations give insight into specific and more general considerations. Specific considerations are the location of the measured peak mooring loads on the measured scatter diagram, the wave directions associated with peak mooring loads and the tidal conditions associated with peak mooring loads. More general considerations are the influence and meaning of the parameters chosen to isolate peak mooring loads, the improvement of MEC mooring design, the improvement of MEC mooring standards and the limitations of this study. These aspects are discussed in the following.
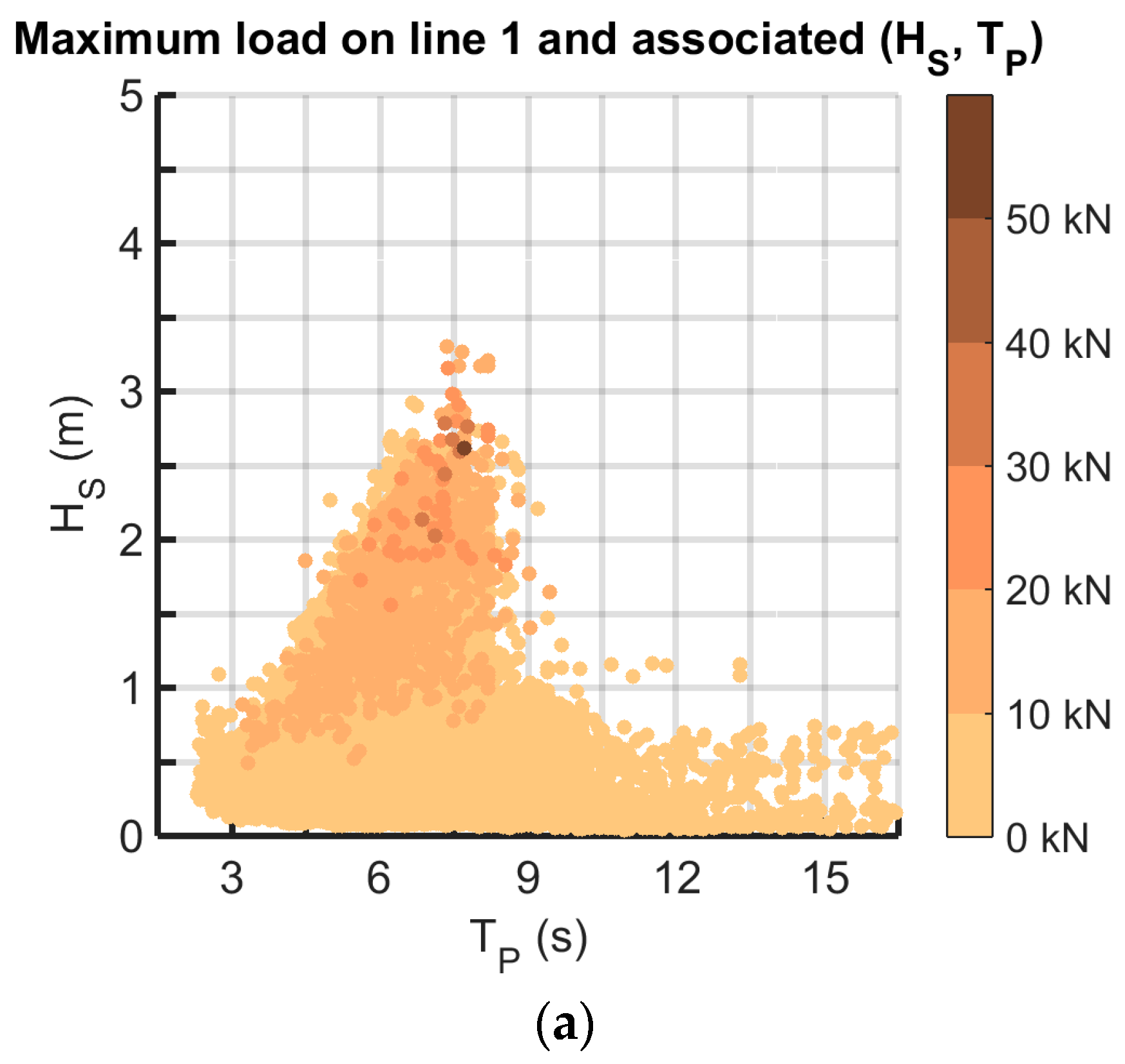
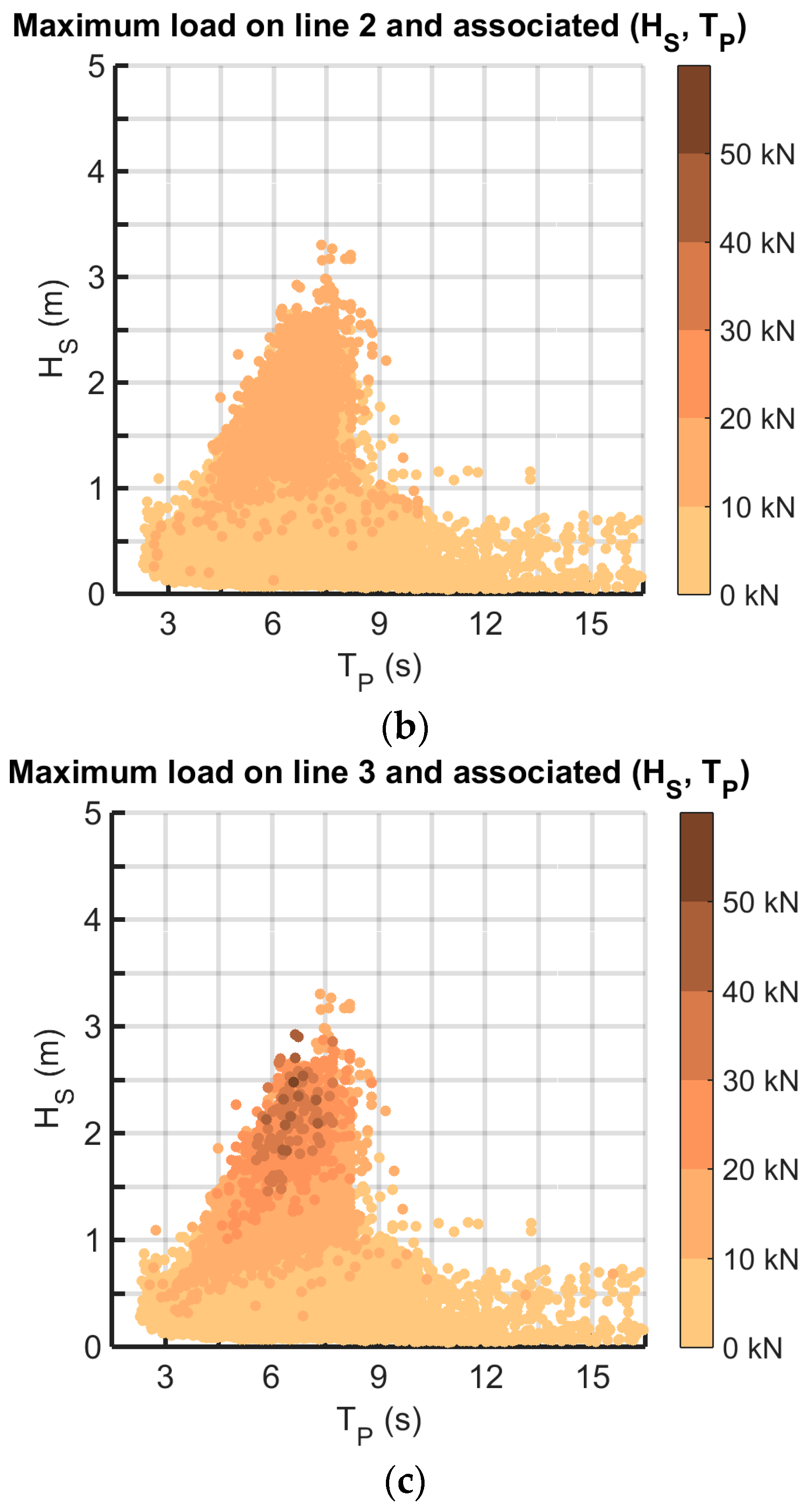
The results indicate that the peak mooring loads were more frequent inside the scatter diagram of the measured sea states (for moderate sea states) than on its external contour line. This can be clearly seen at both installations in
Figure 11a–c (SWMTF) and
Figure 13a–e (Bolt 2 Lifesaver).
Due to short-term response variability, the maximum mooring load for a given duration and for a given sea state is not a single value, but a random variable following the extreme value distribution (EVD), which is mainly dependent on HS and on the mooring system design. The operational sea states were observed a large number of times, so higher mooring loads were more likely to occur for operational sea states representing a higher fractile of the EVD.
Ambühl [
16] similarly noticed that large mooring loads on MEC moorings may occur during operation and not for extreme sea states when the device is in storm protection mode. The findings regarding the occurrence and potential severity of peak loads within this study and [
16] emphasise that it is essential to undertake a detailed fatigue and peak load assessment, considering all operation sea states at an early design phase to avoid field failure.
Table 7 indicated the natural period of the SWMTF moored system. The natural period is approximately 2 s for the heave and pitch motion.
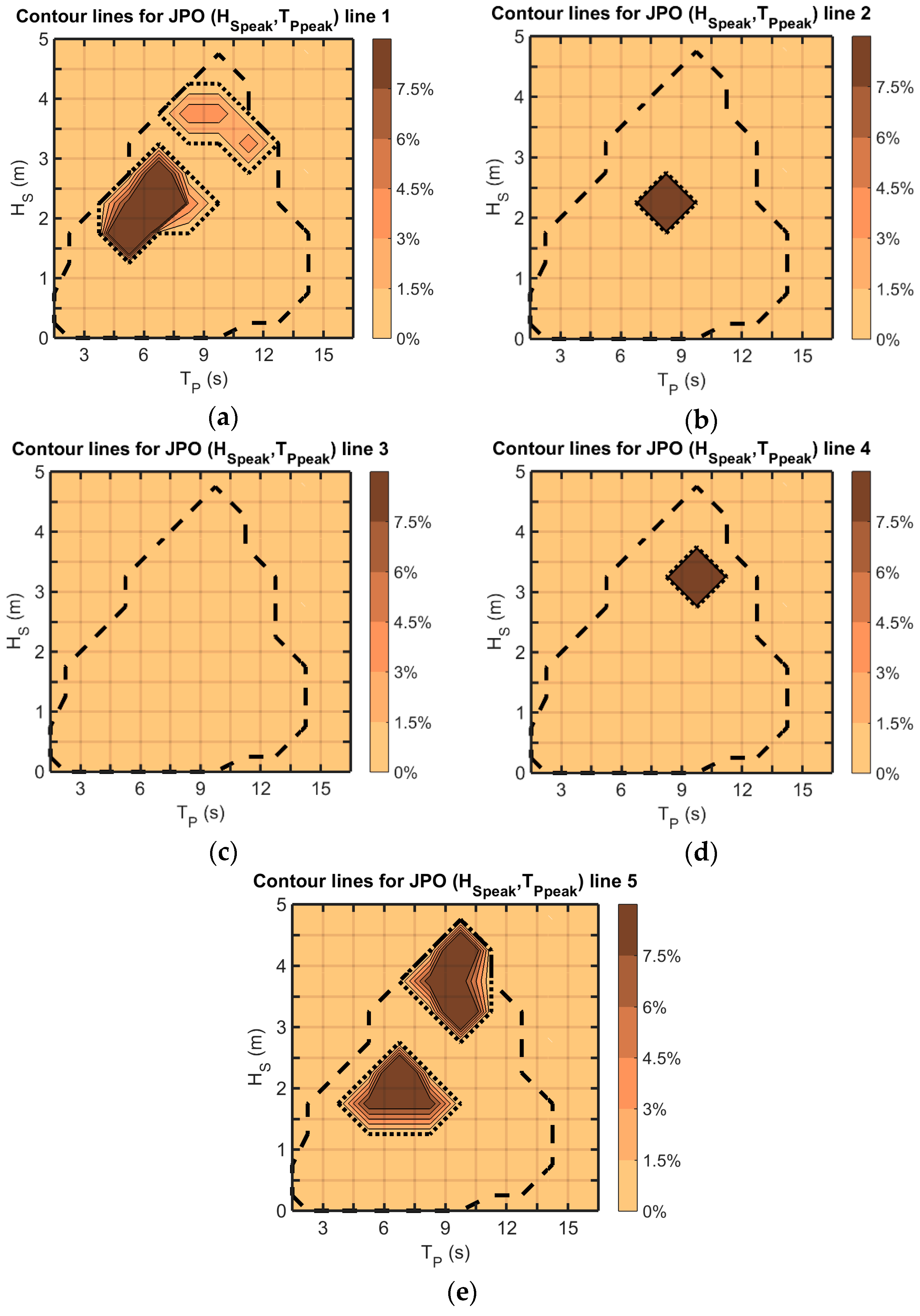
Figure 11a–c shows the joint percentage of occurrences of the wave conditions associated with peak mooring loads
HS peak and
TP peak. Peak mooring loads most frequently occurred for
TP peak around 6 s. This result indicates that the peak mooring loads are not directly driven by a resonant pitch or heave motion of the moored system. The measurements of the six DOF buoy motion, as well as the understanding of the wave elevation at the buoy can be used in the future to gain understanding of the mechanisms behind peak mooring loads.
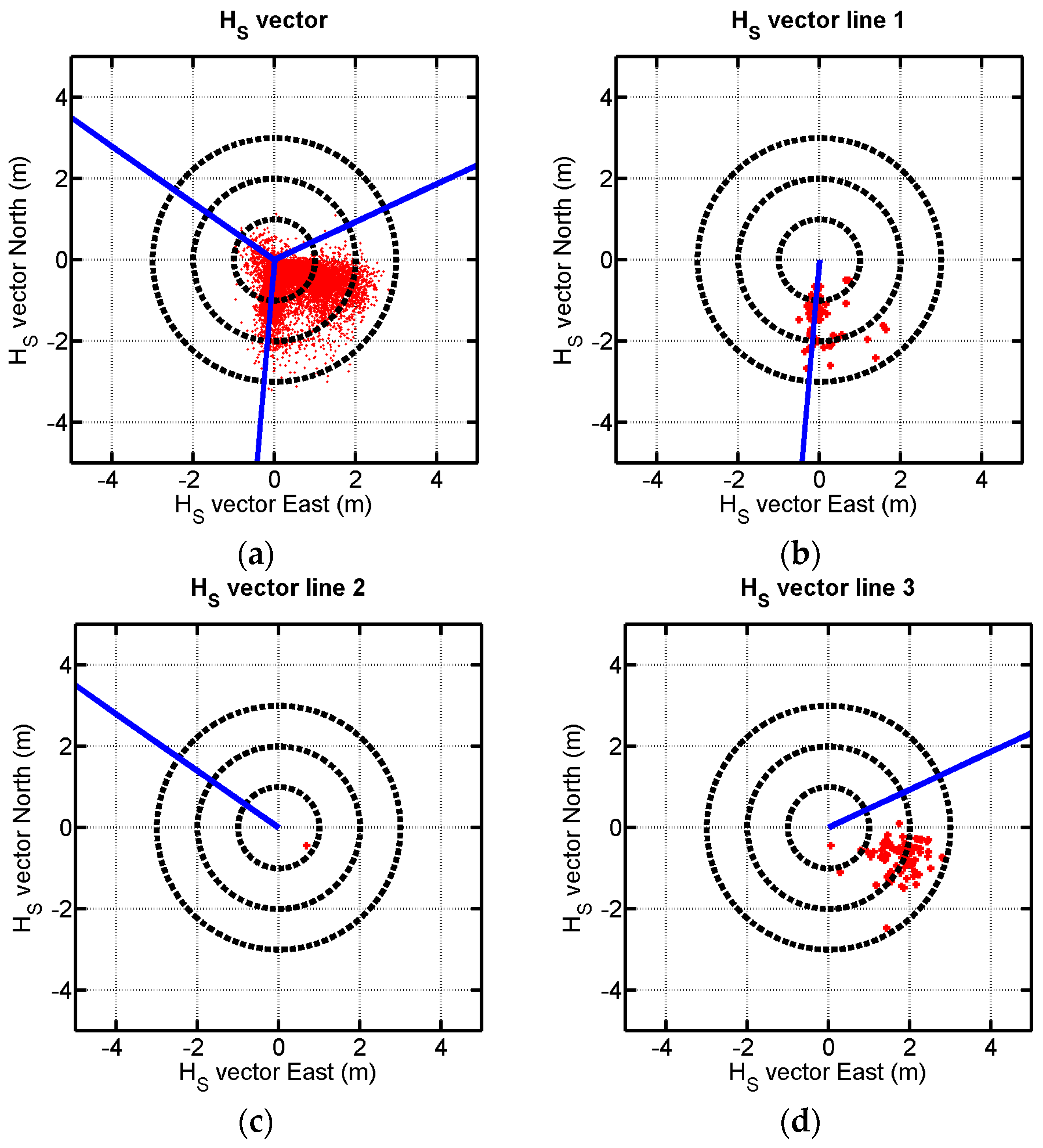
Results indicated that peak mooring loads occurred for a low value of
HS if the mooring line was aligned with the wave direction (
Table 6).
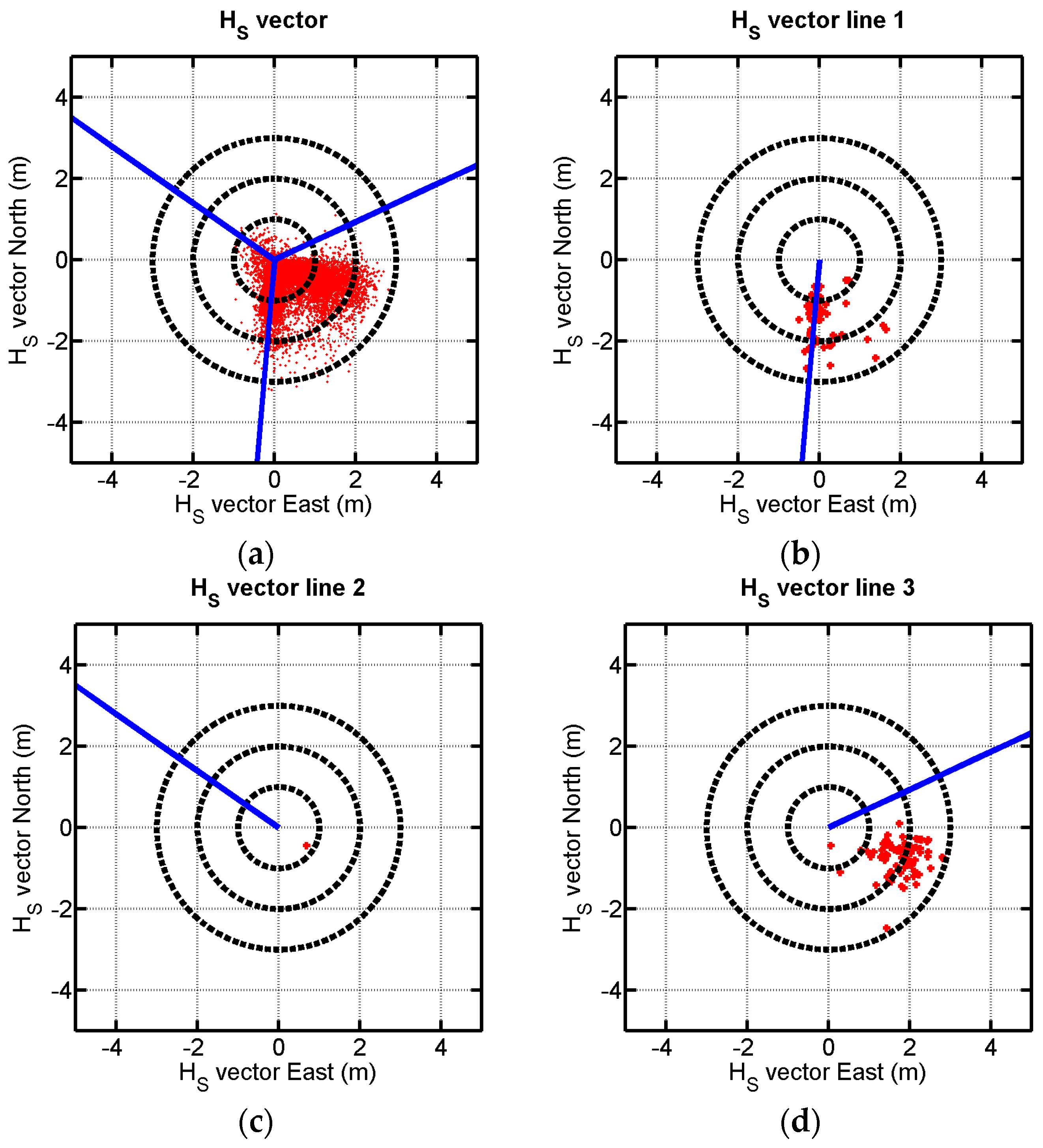
Figure 14a–d plots a vector
HS vec (red dots) with an amplitude equal to
HS and a direction equal to the peak direction
DP, associated with the peak period
TP. In
Figure 14a, the three mooring lines are drawn (blue lines), while in
Figure 14b–d, only one mooring line is drawn.
Figure 14a plots
HS vec for the general environmental conditions, while
Figure 14b–d plots
HS vec for the wave conditions associated with peak mooring loads on mooring lines 1–3, respectively.
Figure 14a shows that two wave climates are occurring at SWMTF: one with waves coming from the east, the other with waves coming from the south. The mooring configuration of SWMTF was orientated to have the easterly sea states between mooring lines 1 and 3. The consequences of this choice can be observed in
Figure 14b–d.
Figure 14d indicates that no waves were able to align with line 3, resulting in peak mooring loads mainly for high
HS values. In
Figure 14b, it can be observed that the waves coming from the south are able to align with line 1, resulting in peak mooring loads, even at low
HS, with wave heights below 1 m. These results indicate that directional contours could be introduced for the mooring design of any system installed in a location with different dominating wave directions in order to optimise the mooring configuration accordingly.
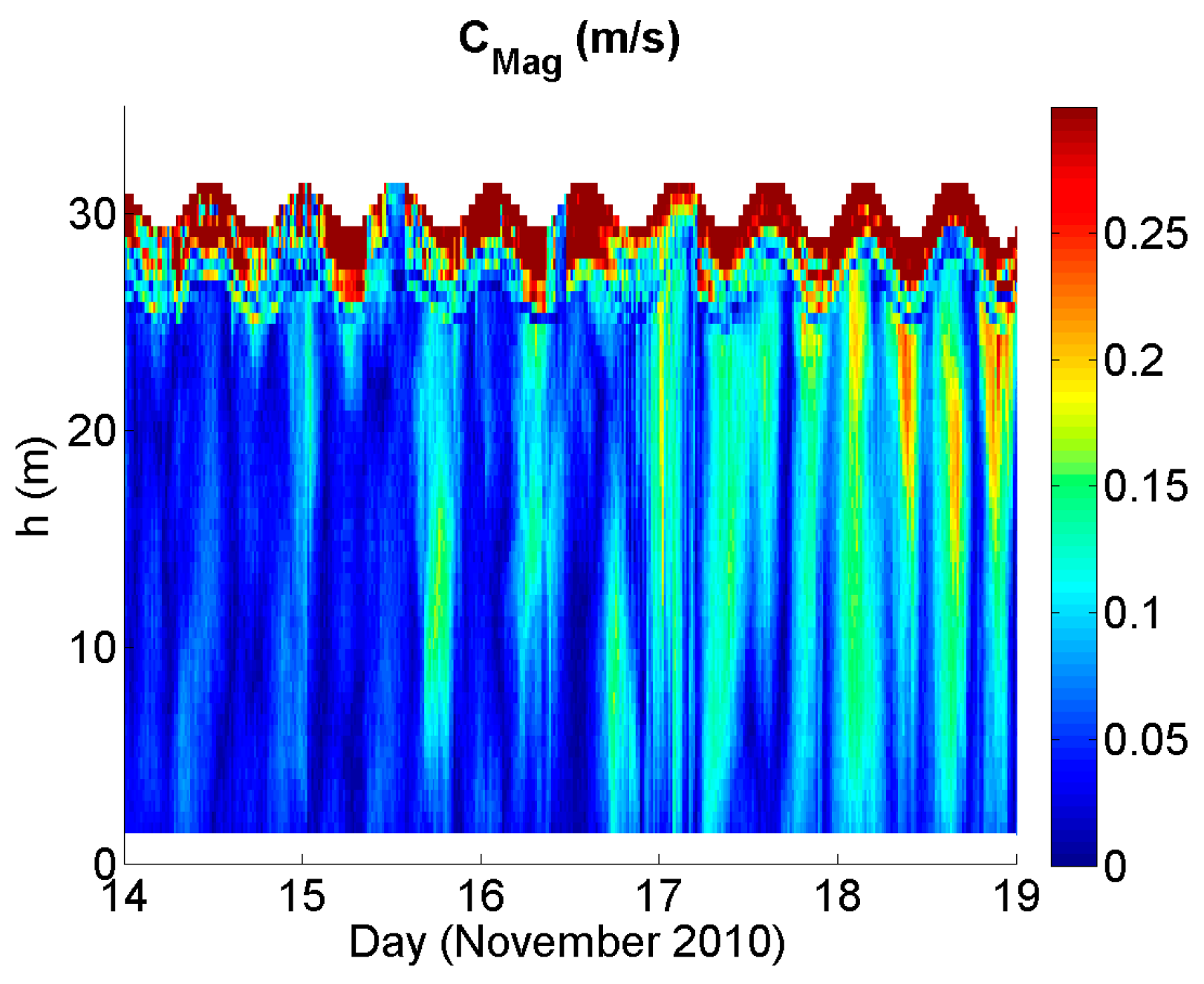
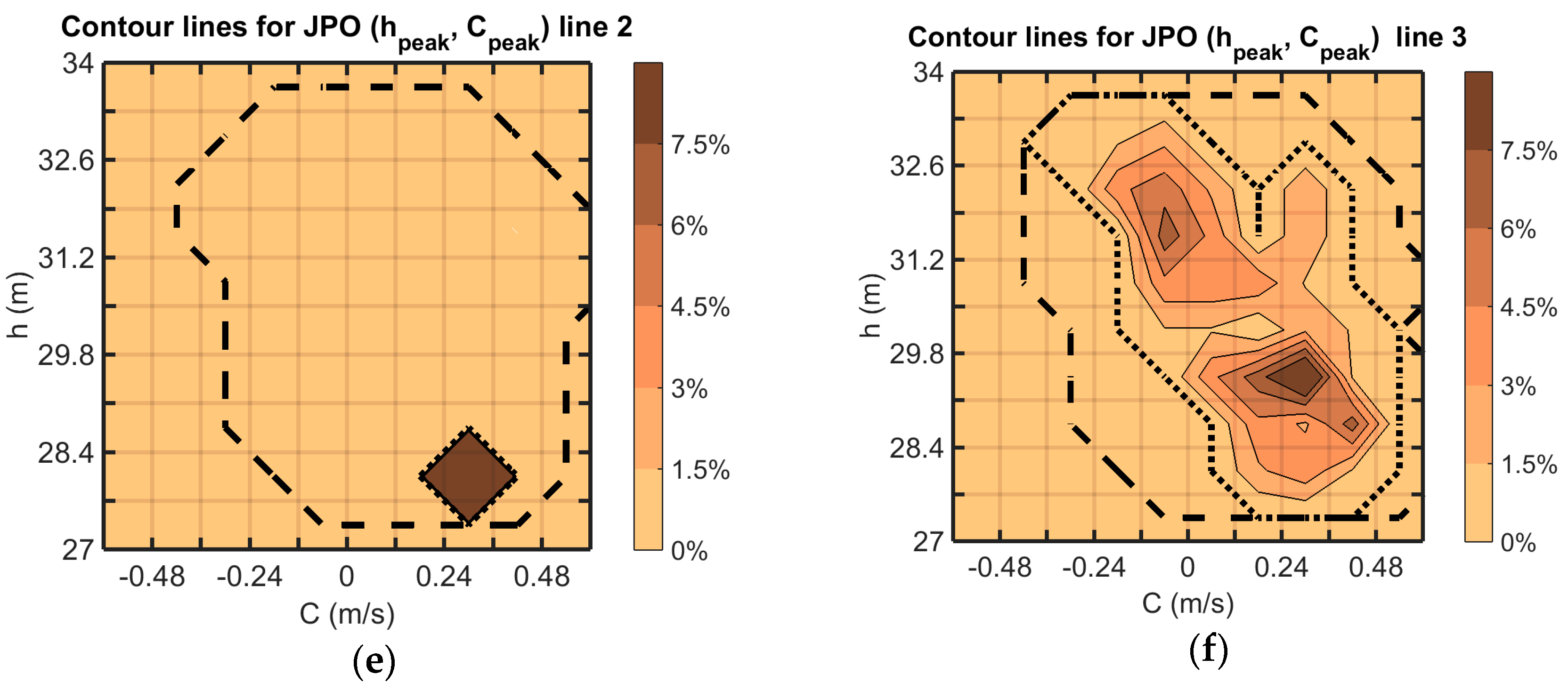
Tidal variations and the change in current direction also need to be taken into account for the mooring design. Based on the SWMTF results (
Figure 11d–f), it can be observed that peak mooring loads are occurring both for low and high tides. The number of occurrences of peak mooring loads seems to be higher for low tidal conditions. However, the number of data points available is relatively low, and more data would be required in order to gain more confidence in this result. This result could be explained by the fact that the pre-tension in the mooring system is reduced for low tide, which consequently can lead to snatch loads [
17]. The mooring system should be carefully designed for low tide conditions, but other tidal ranges have to be investigated during the design process because peak mooring loads also occur for high tide conditions. Standards, such as Det Norske Veritas DNV-OS-E301 [
15] and American Petroleum Institute API RP 2SK [
18], do not give specific recommendations for tidal variations, but they indicate that mooring design should be done for applicable water depths and currents. Based on the results of this study, several tidal elevations should be considered for MEC mooring design with an emphasis on low tide conditions.
The design of a mooring system can be complex if the tidal range is significant to the nominal water depth.
Table 8 compares the nominal water depth and the tidal range at some nursery sites and wave energy facilities. It identifies that pre-tension variations caused at some sites, with a comparatively large tidal range to water depth ratio, could lead to design difficulties of the mooring system.
The tidal range needs to be accommodated by the mooring system, either by a specific mooring configuration or mooring materials. For example, the mooring tethers discussed by Thies
et al. [
17] can accommodate the tidal range. For the two mooring configurations presented in this paper, the tidal range was accommodated by chains lying on the seabed and lifted for high tide conditions. However, these chains add weight on the floating structure, which may be prejudicial to the power production.
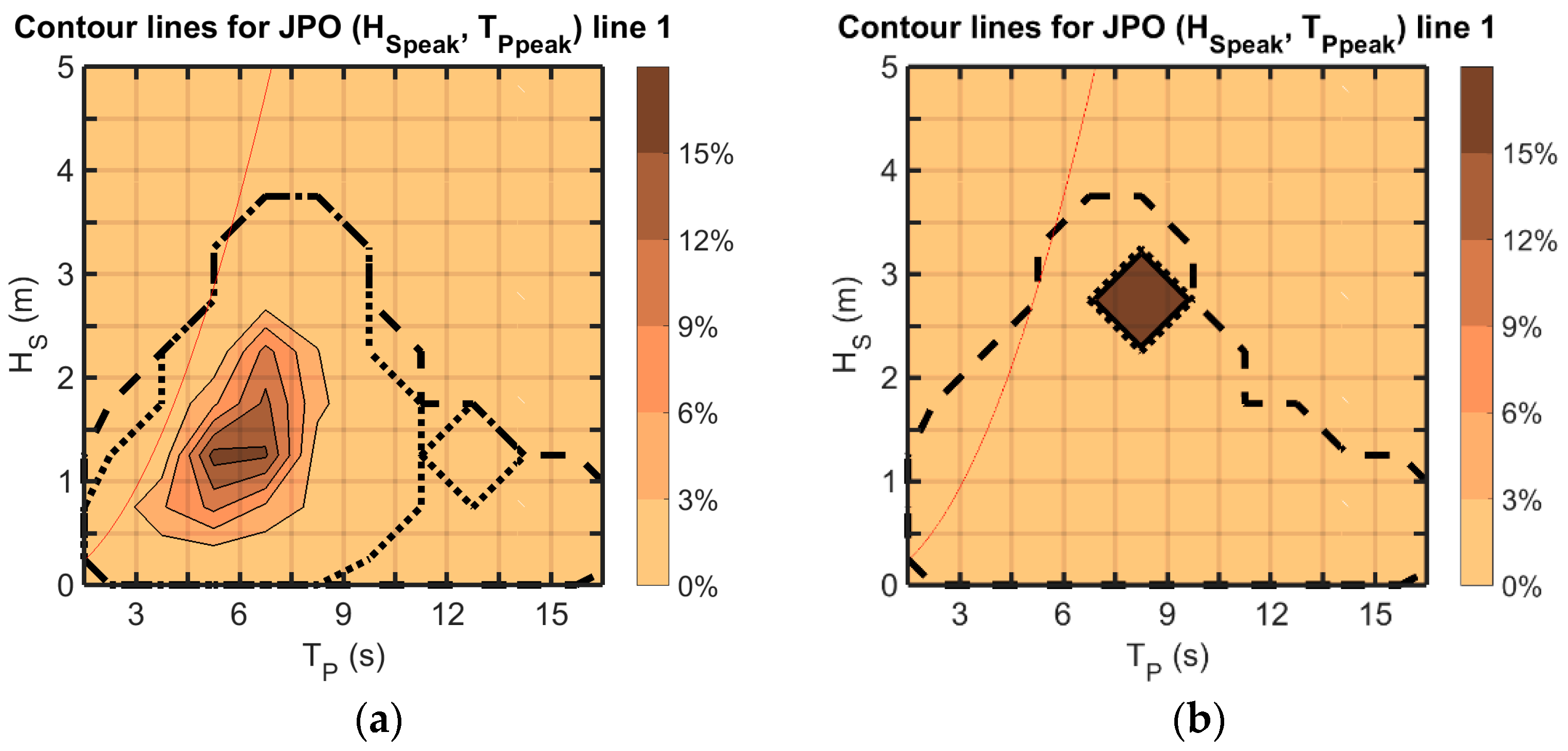
Table 6 gives a first indication of the influence of the parameters
τ and
K, which have been used in this paper to detect peak mooring loads. The percentage of sea states considered as containing peak mooring loads is indicated in this table for different
τ and
K combinations. It is of interest to gain more insight into the influence of
τ and
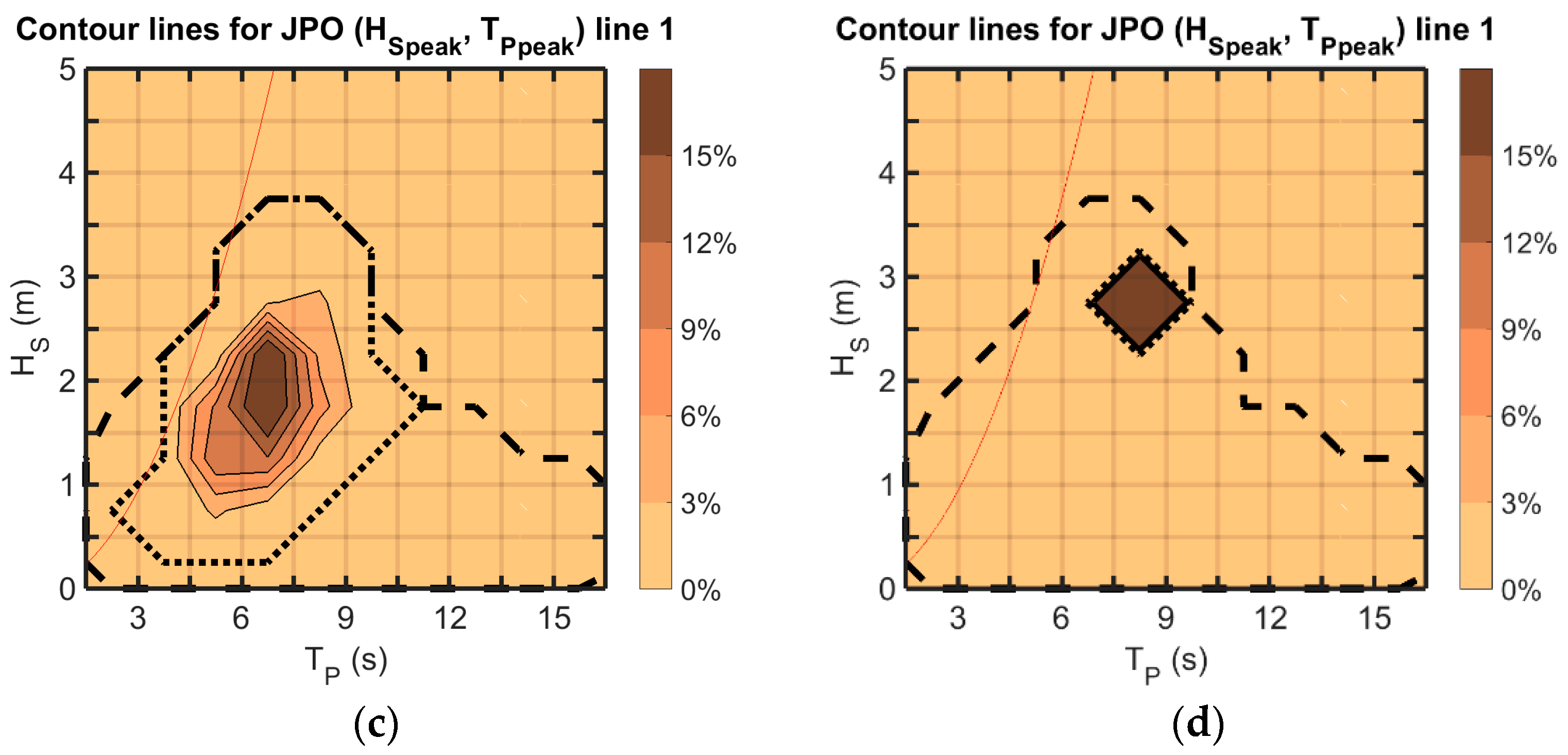
K on the detection of peak mooring loads. Whilst the analysis method is generic and applicable to different sites and devices, the individual parameters depend on the device characteristics, the site conditions and of course the mooring configuration and materials. As such, a sensitivity study is recommended to determine the specific parameters. The environmental conditions associated with peak mooring loads on mooring line 1 at SWMTF, shown in
Figure 11a, have been plotted for different
τ and
K parameter values. The results of this sensitivity study are presented in
Figure 15a–d. For lower values of
τ, the JPO plots are similar, irrespective of
K: peak loads still occur inside the scatter diagram, but they occur for sea states with higher
HS when
τ increases and with lower
HS when
τ decreases. For higher values of
τ irrespective of
K, only a few peak loads have been detected, and therefore, these results are difficult to use for general conclusions. Hence, the chosen values for
τ and
K must strike a balance of isolating peak loads (requiring high values) whilst capturing a sufficient amount of peak loads.
Some parameters could be further investigated to reduce the number of occurrences of peak mooring loads:
- (a)
An increase of the pre-tension of the mooring system would reduce the number of occurrences of peak mooring loads, as suggested by the semi-taut configuration discussed by Johanning and Smith [
21]. However, this should be balanced with the power production for a WEC device. A high pre-tension would reduce the motion of the floating structure and consequently will have an effect on the power production in the case of a motion-dependent wave energy device. With a semi-taut configuration, it would also be difficult to achieve a sufficiently high pre-tension for low tide, while achieving a reasonably low pre-tension for high tide.
- (b)
An increase in the number of lines can also reduce the number of peak mooring loads. The results from the Bolt-2 Lifesaver mooring with five mooring lines cannot be directly compared to the SWMTF mooring with three mooring lines, as the period and duration of tests were different, and the floating structures are considerably different in size and mass. However, this solution is not cost effective because of the cost of the extra mooring lines, and it may also affect the power production by restraining the motion of the floating structure.
- (c)
If the installation site has a limited number of wave directions and a low number of mooring lines, the mooring system can be oriented to avoid the worst wave climate. However, the seabed properties also have to be considered. The presented installations use drag embedment anchors, which require a soft soil, e.g., sand or clay.
The findings in this paper indicate that specific MEC design procedures would be beneficial. Currently, MEC devices are largely designed following offshore standards, with a tendency for too conservative design assumptions, leading to overdesigned mooring systems [
22]. Design calculations could be conducted inside the scatter diagram, during operations. These calculations are most of the time already conducted for PTO optimisation and survival. MEC mooring systems could also be designed following a load and resistance factor design (LRFD) method [
23], which is well suited to a given MEC mooring system.
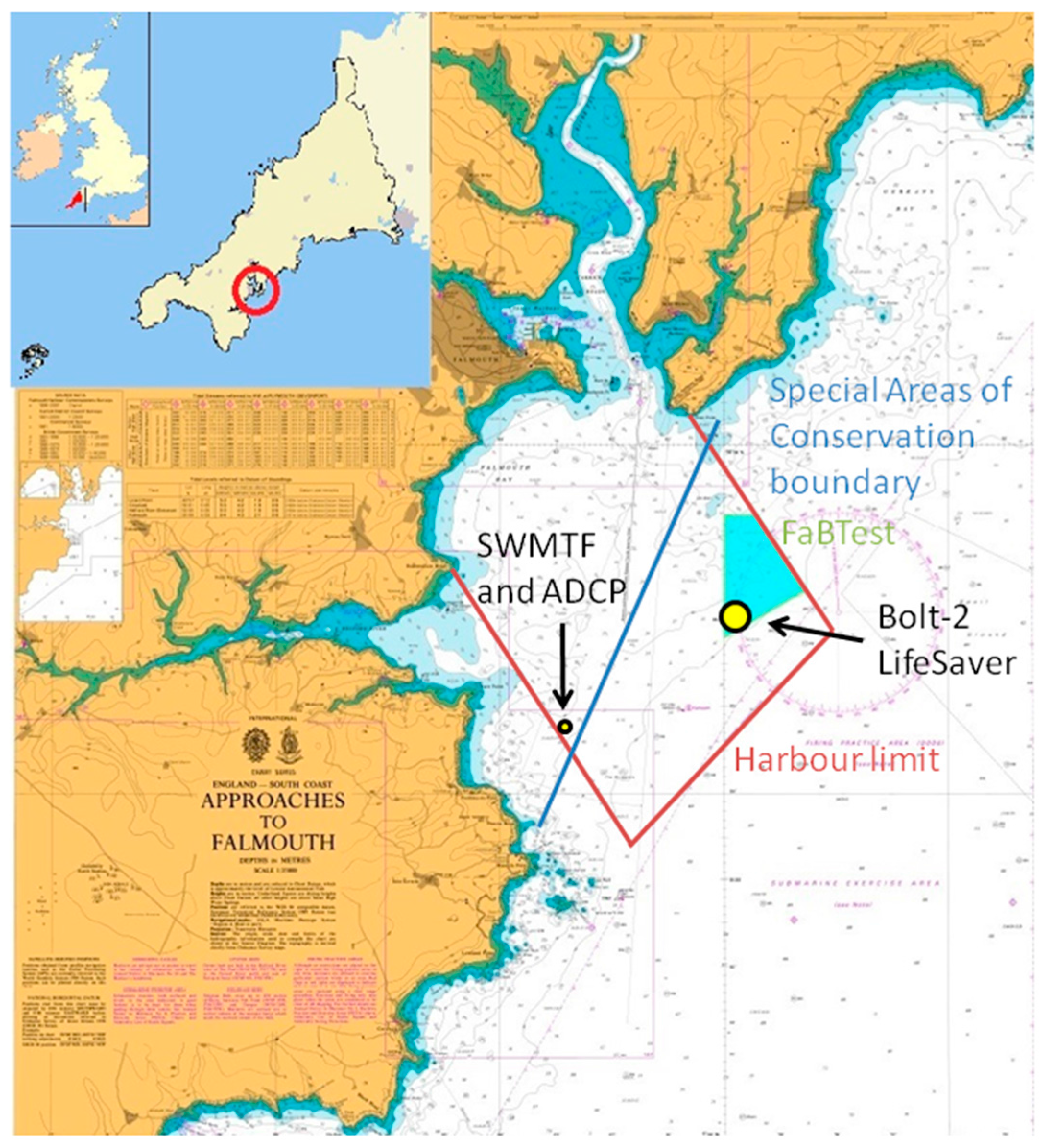
One of the limitations of this study is that the two test sites used for this study are close to each other, with similar sheltered wave conditions and similar tidal conditions, and installed for a relatively short period of time. The two use similar multi-leg catenary moorings. The positive point is that some confidence can be gained in the results by observing similar results at both facilities and by comparing and explaining the differences. One of the main differences between both facilities is that FaBTest is in a more exposed location. This can be observed in the general wave condition results with more bins populated in the wave scatter diagram at FaBTest than at SWMTF, for a shorter sea trial time. Furthermore, the Bolt-2 Lifesaver device was operational, and the results did not consider if the PTOs were working or not. Further investigations could be conducted to assess if the mooring loads are reduced when the PTOs are active.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}