
Research on Receiving Seeds Performance of Belt-Type High-Speed Corn Seed Guiding Device Based on Discrete Element Method


Abstract
:1. Introduction
2. Materials and Methods
2.1. Structure and Operating Principle of Belt-Type Corn Seed Guiding Device
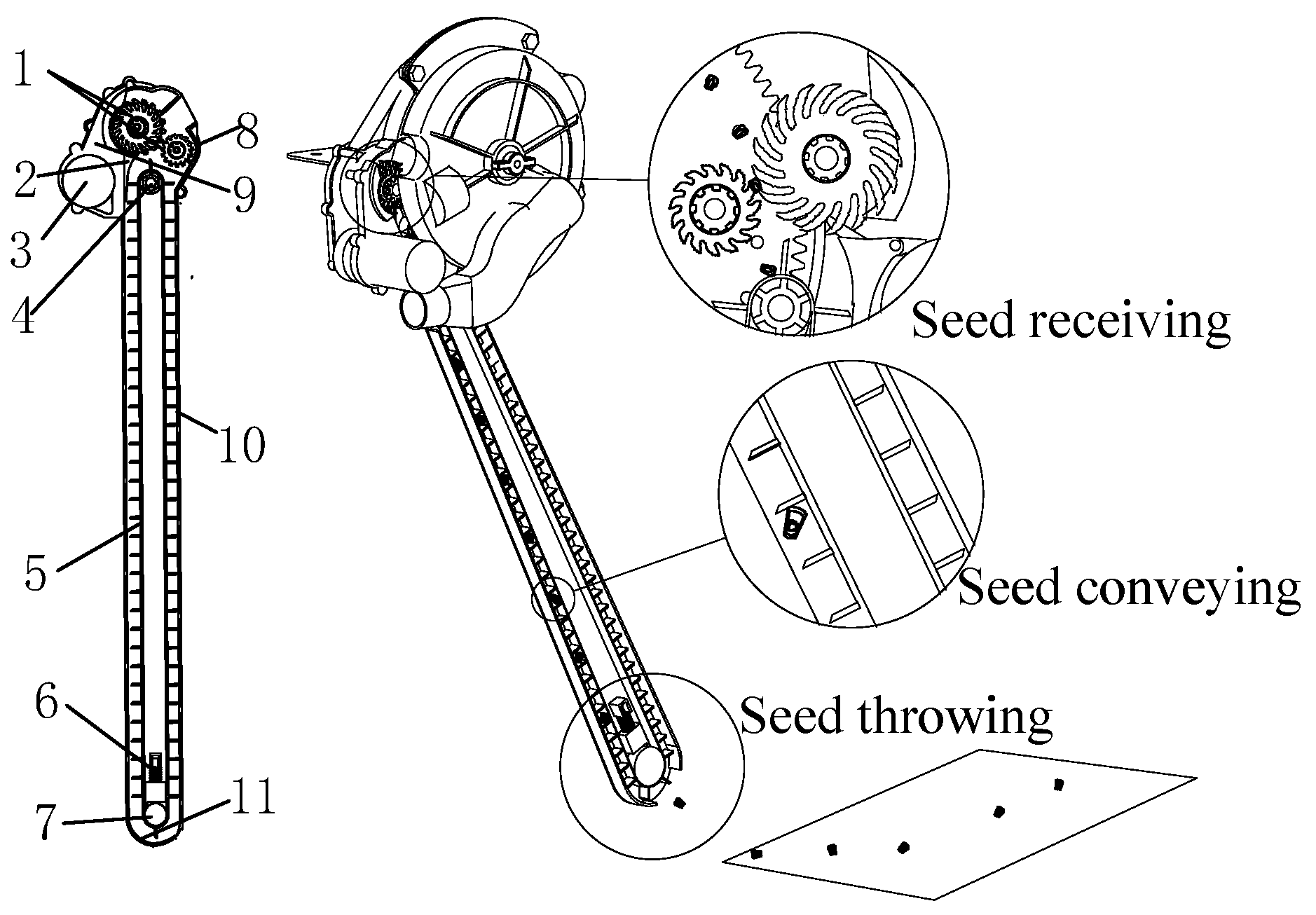
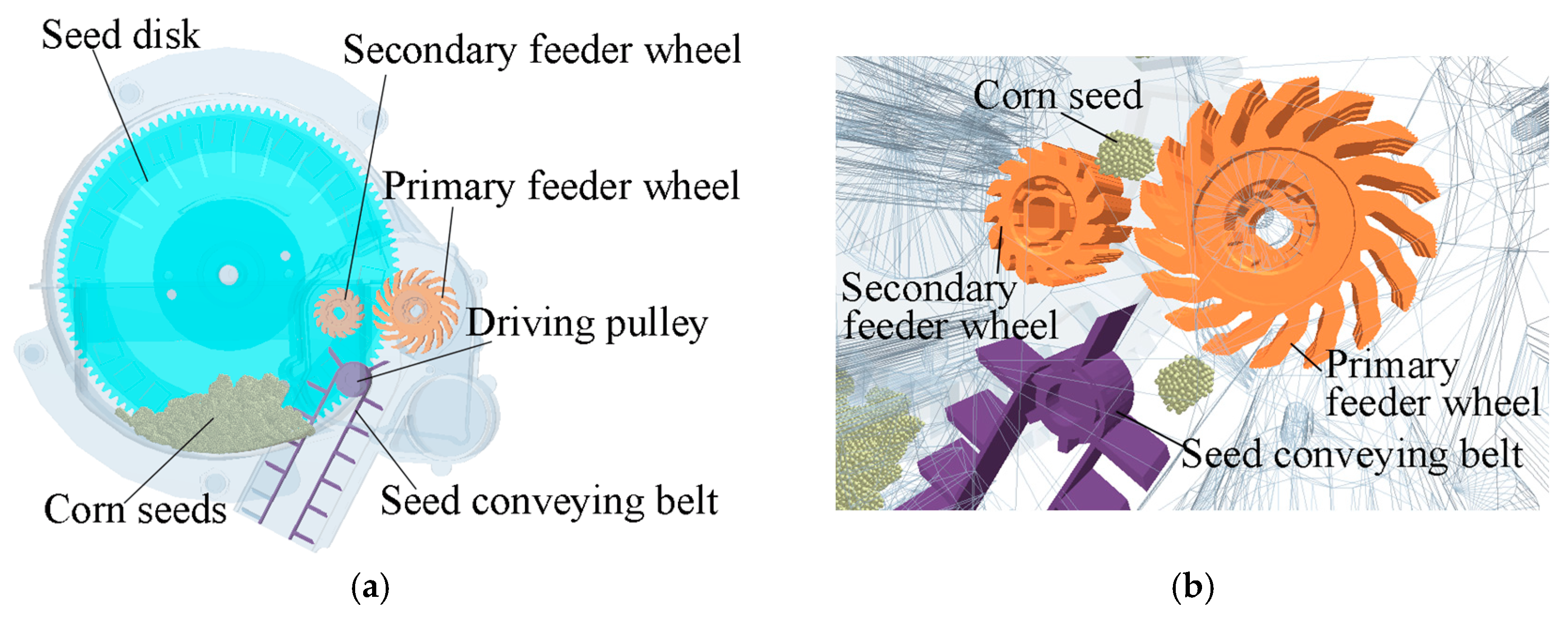
2.1.1. Device Structure
2.1.2. Principle of Operation
2.2. Analysis of Seed Receiving System
2.2.1. Composition and Operating Principle of Seed Receiving System
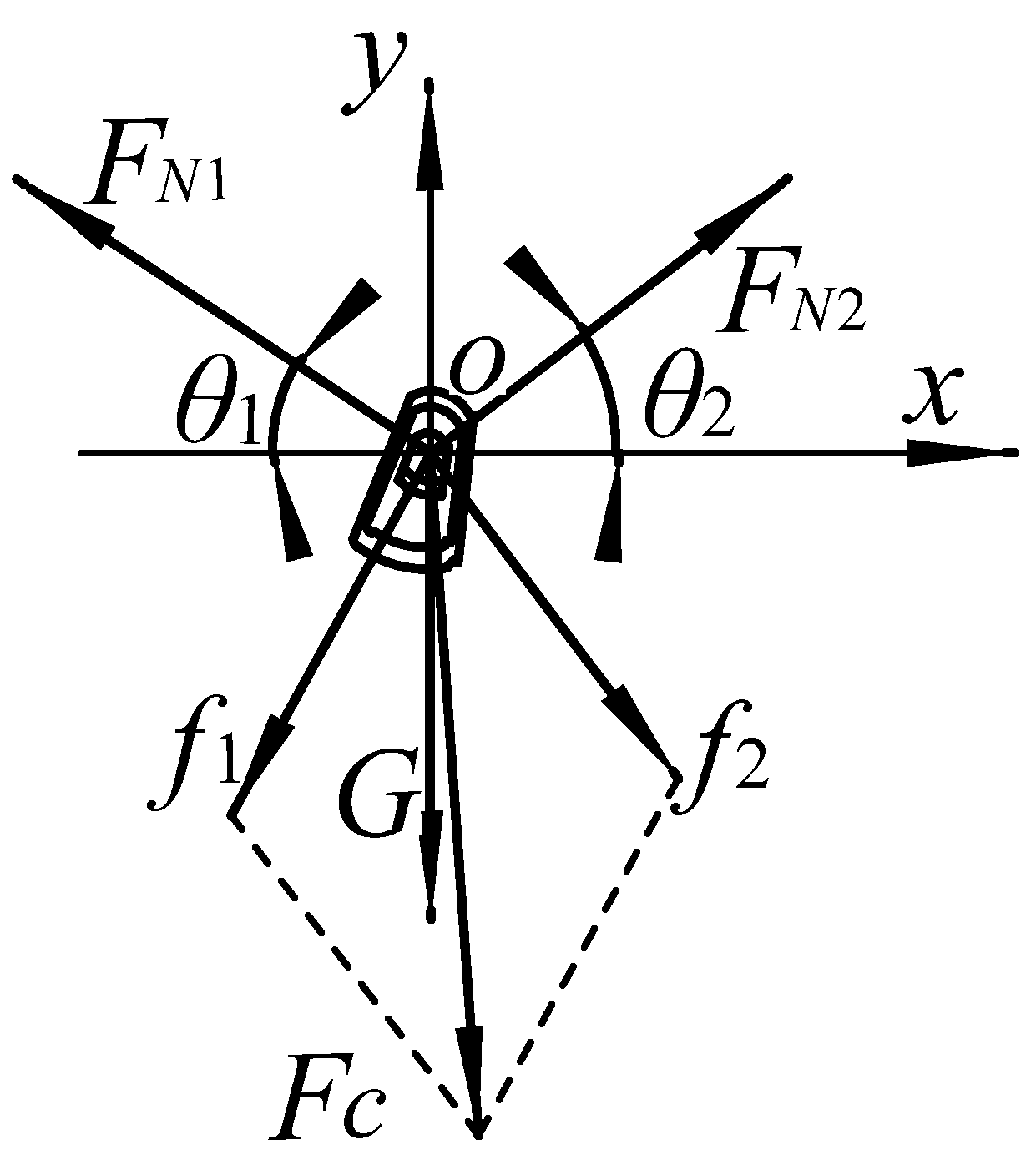
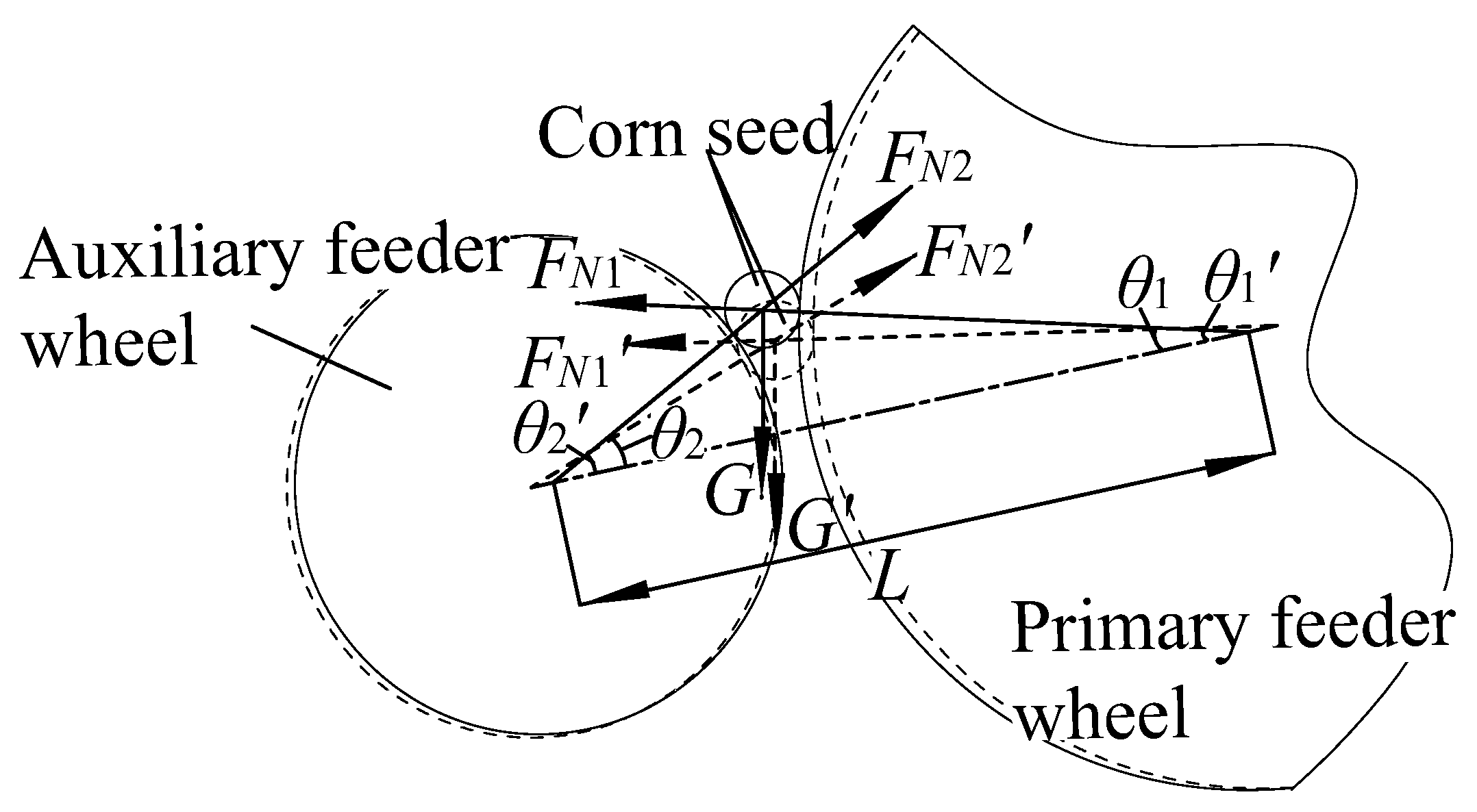
2.2.2. Mechanical Analysis of Seeds Receiving Process
- (1)
- Mechanical analysis of clamping seeds
- (2)
- Mechanical analysis of transporting seeds
- (3)
- Mechanical analysis of releasing seeds
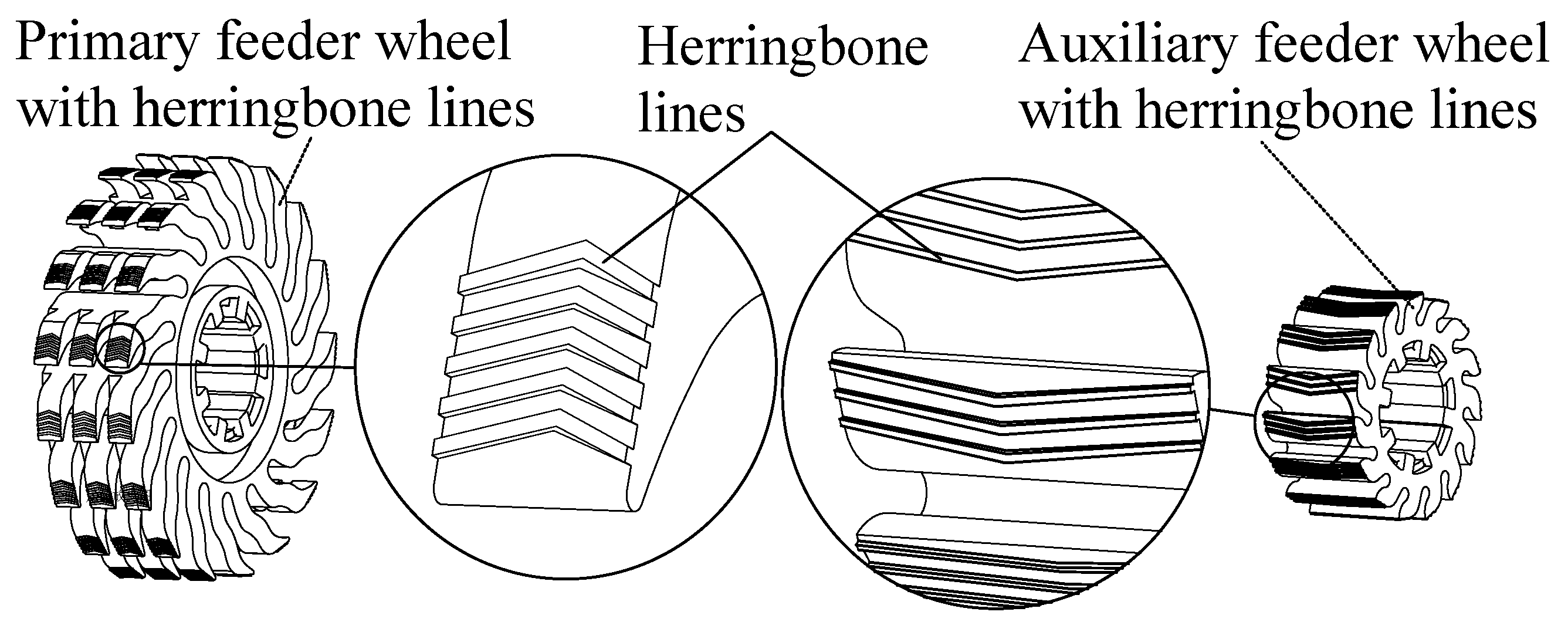
2.3. Improvement Scheme of the Feeder Wheel
2.4. EDEM Simulation and Analysis of Seed Receiving
2.4.1. Particle Modeling of Corn Seeds
2.4.2. Geometric Modeling
2.4.3. Parameter Setting of the Simulation
3. Results and Discussion
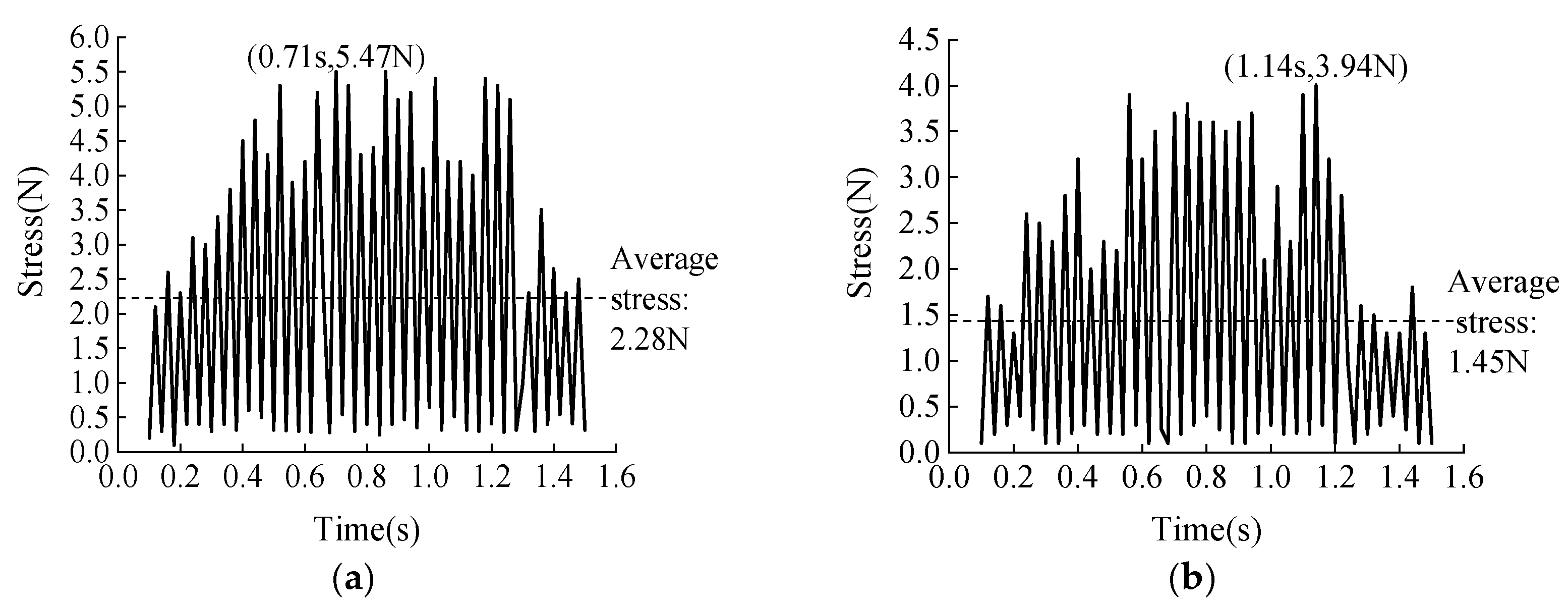
3.1. Corn Seed Stress Analysis
3.1.1. Stress Analysis of Corn Seeds with Herringbone Lines
3.1.2. Force Analysis of Wheels Center Distance on Corn Seeds
3.2. Analysis of the Seed Cavity’s Seed Entering Speed
3.2.1. Analysis of Feeder Wheel Speed on the Speed of Seeds Entering the Seed Cavity
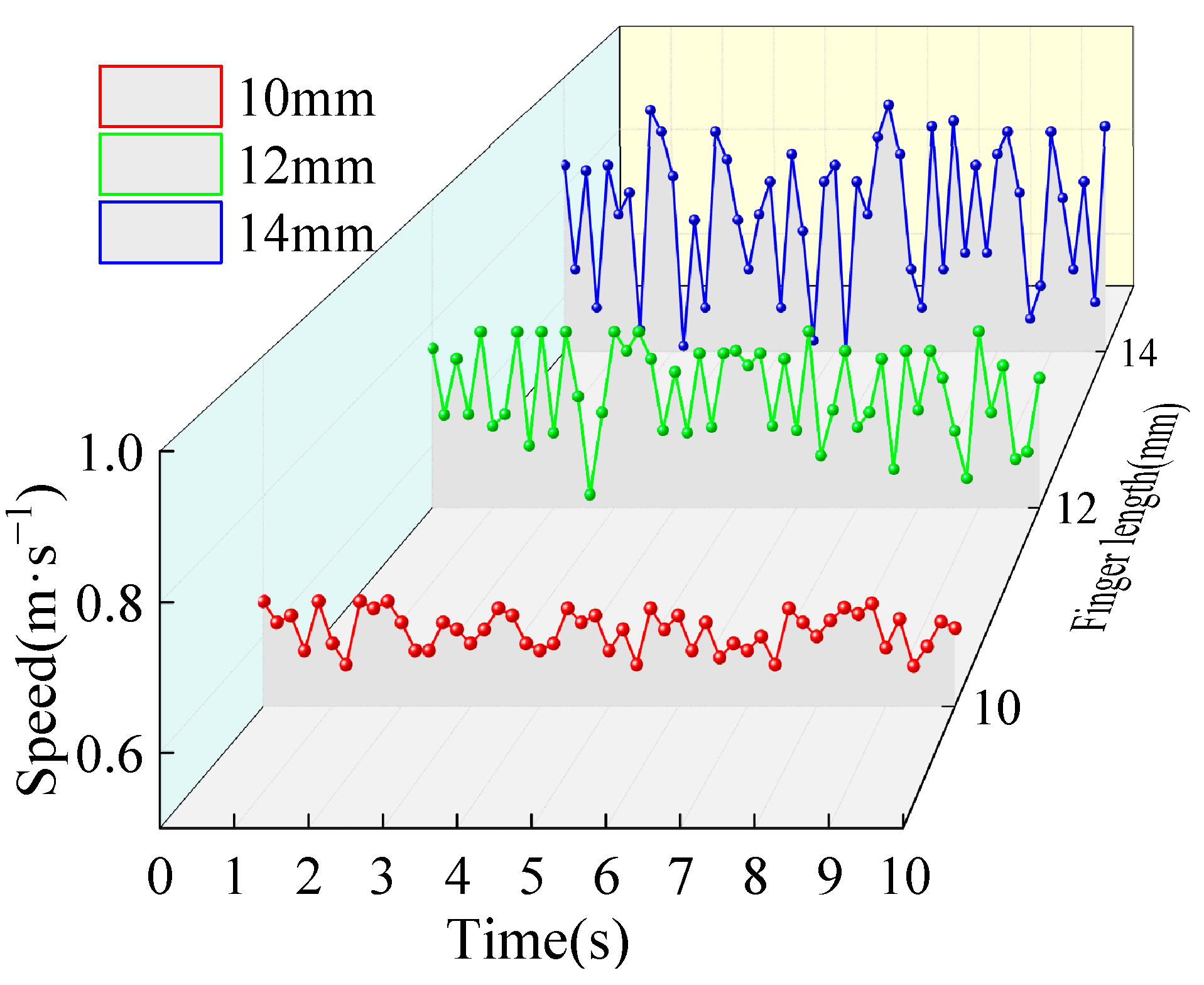
3.2.2. Analysis of Finger Length on the Speed of Seed Entering Seed Cavity
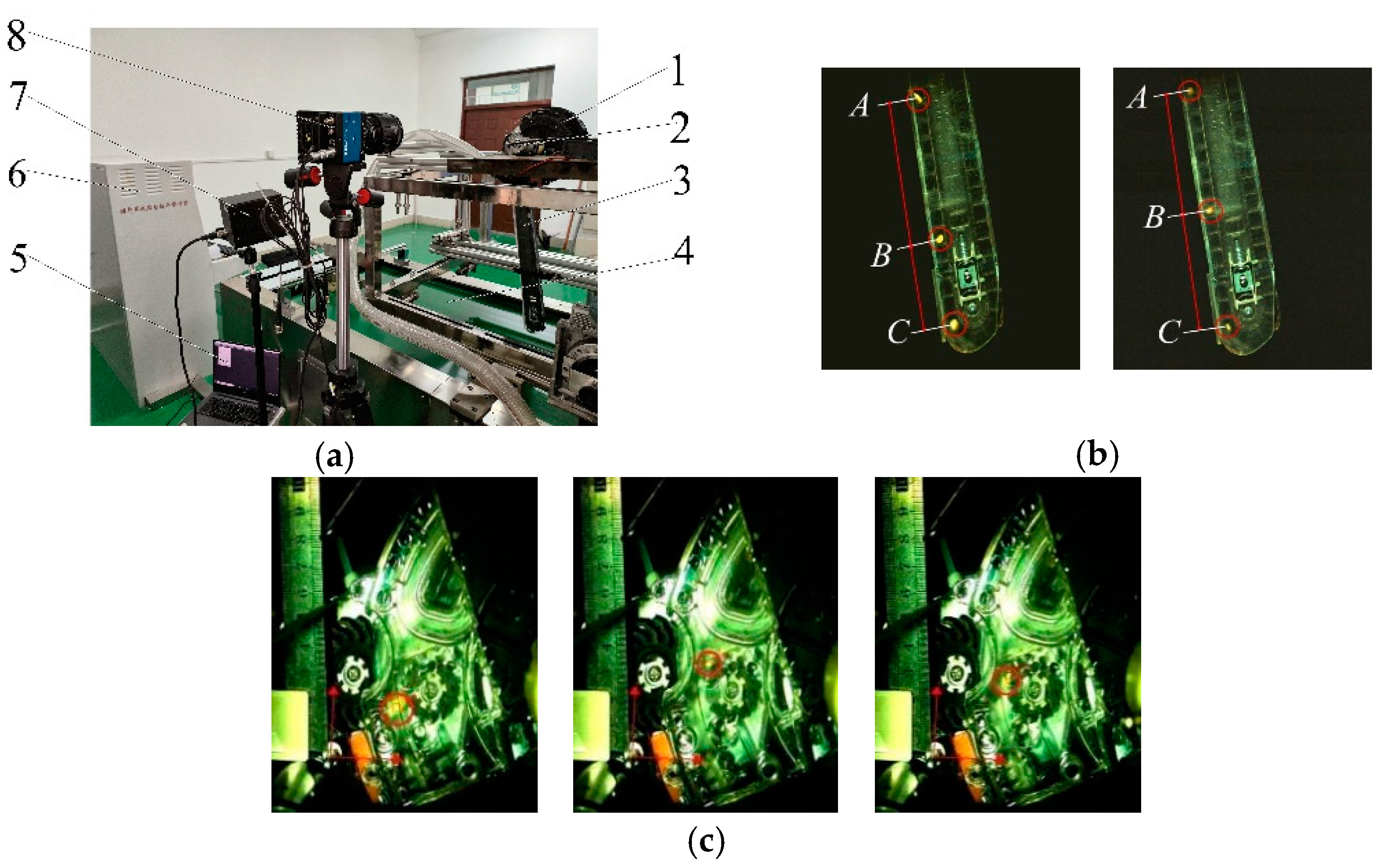
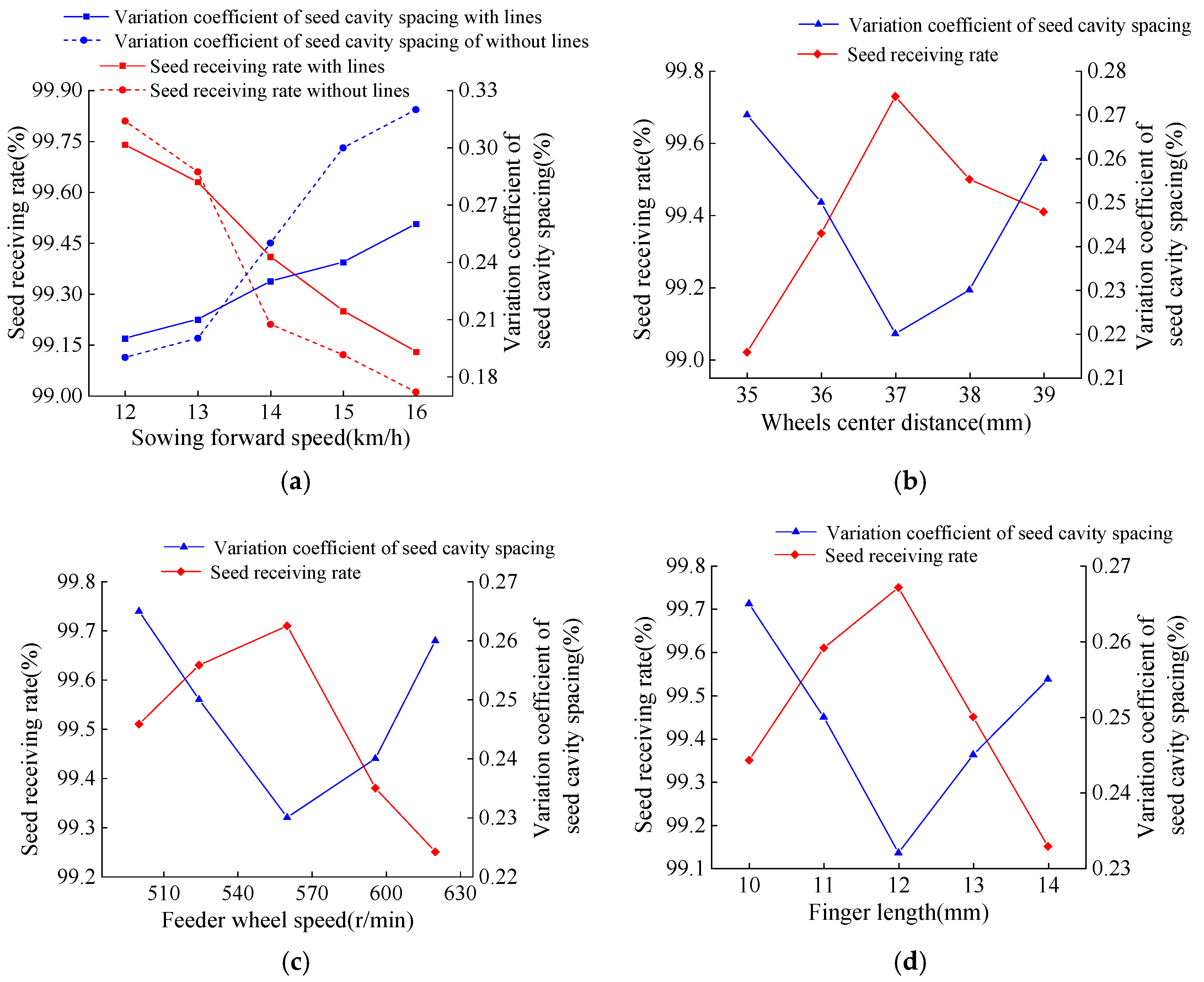
3.3. Verification Test
4. Conclusions
- (1)
- Taking the belt-type high-speed corn seed guiding device with a seed receiving system as the research object, the seed receiving system was analyzed, the seed dynamics model in the process of clamping, transporting, and releasing seeds by feeder wheel was established, the improved method of adding herringbone lines on the finger surface was put forward, and it was clear that the main factors affecting the seed receiving stability and the accuracy of seeds entering the seed cavity were the wheels’ center distance, the feeder wheel speed, and the finger length.
- (2)
- By using EDEM simulation technology, the seed receiving process was simulated. The findings demonstrate that by adding herringbone lines to the feeder wheel, the stress on seeds can be clearly increased. The average value of the stress on the seeds was the highest at a wheel center distance of 37 mm. The stability and speed fluctuation of seeds introduced into the seed cavity were better when the feeder wheel speed was 560 r/min. The speed of fluctuation and stability of seeds introduced into the seed cavity were better when the finger length was 12 mm.
- (3)
- The bench test results were largely consistent with the virtual simulation according to the results of the verification test, so it can be used to model and examine how the seed receiving system of a belt-type high-speed corn seed guiding device functions.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Assem, S.K. Maize, tropical (Zea mays L.). Methods Mol. Biol. 2015, 1223, 119–134. [Google Scholar] [CrossRef] [PubMed]
- Ji, J.; Sang, Y.; He, Z.; Jin, X.; Wang, S. Designing an intelligent monitoring system for corn seeding by machine vision and Genetic Algorithm-optimized Back Propagation algorithm under precision positioning. PLoS ONE 2021, 16, e0254544. [Google Scholar] [CrossRef] [PubMed]
- Karayel, D.; Šarauskis, E.; Aktaş, A. Design and Experiment of a Helicoidal Seed Tube to Improve Seed Distribution Uniformity of Seed Drills. Processes 2022, 10, 1271. [Google Scholar] [CrossRef]
- Liu, Q.; Zhang, D.; Yang, L.; Wang, X.; Wang, Y.; Zhang, X.; Liang, D. Design and experimental study of seed precise delivery mechanism for high-speed maize planter. J. Terramech. 2018, 11, 81–87. [Google Scholar] [CrossRef]
- Jun, G.; Yue, Y.; Memon, M.S.; Chuang, T.; Linyu, W.; Pei, T. Design and simulation for seeding performance of high-speed inclined corn metering device based on discrete element method (DEM). Sci. Rep. 2022, 12, 19415. [Google Scholar] [CrossRef] [PubMed]
- Liu, W.; Su, Q.; Fang, M.; Zhang, J.; Zhang, W.; Yu, Z. Parameters Calibration of Discrete Element Model for Corn Straw Cutting Based on Hertz-Mindlin with Bonding. Appl. Sci. 2023, 13, 1156. [Google Scholar] [CrossRef]
- Mapoka, K.O.M.; Birrell, S.J.; Tekeste, M. A comprehensive survey of nondestructive sensing technologies for the detection of corn seeds in a closed trench and measuring planting depth to augment the conventional method. Comput. Electron. Agric. 2019, 158, 249–257. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, W.; Su, Q.; Liu, W.; Yu, Z. Sensing System for Real-Time Measurement of Seed Spacing, Depth, and Geo-Location of Corn: A Proof-of-Concept Study. Sensors 2020, 20, 392. [Google Scholar] [CrossRef]
- Liu, C.; Tian, J.; Zhang, L.; Wang, J. Numerical simulation of seed flow and distribution in a planter with a seed disk metering device based on EDEM. J. Agric. Sci. 2017, 155, 1461–1468. [Google Scholar] [CrossRef]
- Gheorghe, I.; Gheorghe, C. Numerical simulation of seed distribution of a pneumatic seed meter. Bull. UASVM Agric. 2019, 66, 41–48. [Google Scholar] [CrossRef]
- Mudarisov, S.G.; Badretdinov, I.; Rakhimov, Z.; Lukmanov, R.; Nurullin, E. Numerical simulation of two-phase “Air-Seed” flow in the distribution system of the grain seeder. Comput. Electron. Agric. 2020, 168, 105151. [Google Scholar] [CrossRef]
- Liu, R.; Liu, L.; Li, Y.; Liu, Z.D.; Zhao, J.; Liu, Y.; Zhang, X. Numerical Simulation of Seed-Movement Characteristics in New Maize Delivery Device. Agriculture 2022, 12, 1944. [Google Scholar] [CrossRef]
- Wang, M.; Liu, Q.; Ou, Y.; Zou, X. Numerical Simulation and Verification of Seed-Filling Performance of Single-Bud Billet Sugarcane Seed-Metering Device Based on EDEM. Agriculture 2022, 12, 983. [Google Scholar] [CrossRef]
- Wang, H.; Sun, X.; Li, H.; Fu, J.; Zeng, X.; Xu, Y.; Wang, Y.; Liu, H.; Lü, Z. Design and Parameter Optimization of a Finger Clip Plate Garlic Seed-Metering Device Based on EDEM. Agronomy 2022, 12, 1543. [Google Scholar] [CrossRef]
- Shi, L. Effect of potato contact parameters on seed metering performance using discrete element method. Span. J. Agric. Res. 2022, 20, e0202. [Google Scholar] [CrossRef]
- Xie, C.; Zhang, D.; Yang, L.; Cui, T.; He, X.; Du, Z. Precision seeding parameter monitoring system based on laser sensor and wireless serial port communication. Comput. Electron. Agric. 2021, 190, 106429. [Google Scholar] [CrossRef]
- Chen, Z.; Zhong, Q. Real-time monitoring biomarker expression of carcinoma cells using a microfluidic device. Chem. Commun. 2012, 48, 10389–10391. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, J.; Li, X.; Wang, Y.; Zhang, H. Simulation analysis and experimental validation of conveying performance of a novel seed metering device for precision seeder. Comput. Electron. Agric. 2020, 172, 105388. [Google Scholar] [CrossRef]
- Wang, J.; Liang, J.; Liu, X. Accurate Seed Throwing Mechanism and Electrically-Driven Accurate Seed Throwing Device. Patent CN104956815A, 7 October 2015. [Google Scholar]
- Govender, N.; Wilke, D.N.; Wu, C.Y.; Khinast, J.; Pizette, P.; Xu, W. Hopper flow of irregularly shaped particles (non-convex polyhedra): GPU-based DEM simulation and experimental validation. Chem. Eng. Sci. 2018, 192, 1031–1044. [Google Scholar] [CrossRef]
- Liang, Y.; Wang, J.; Liang, J. DEM–SPH coupling method for the interaction between irregularly shaped particles and liquid in rotating cylindrical drum. Powder Technol. 2020, 374, 283–289. [Google Scholar] [CrossRef]
- Katterfeld, A.; Schöneburg, R. DEM simulations of amorphous irregular shaped micrometer particles: Influence of particle shape on packing structure and bulk behavior. Powder Technol. 2015, 283, 26–34. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, J.; Liang, J. DEM simulation of irregularly shaped particles with different aspect ratios in a rotating drum: Effect of particle shape on mixing behavior and flow pattern transition. Powder Technol. 2019, 343, 262–269. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, J.; Liang, J. DEM simulation of irregularly shaped particles with different sphericities in a rotating drum: Effect of particle shape on mixing behavior and flow pattern transition. Powder Technol. 2017, 322, 326–335. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, J.; Liang, J. An effective sphere-based model for breakage simulation in DEM. Powder Technol. 2021, 390, 325–343. [Google Scholar] [CrossRef]
- Cheng, Y.; Cui, J.; Zhou, L.; Liu, X. Numerical simulation of the seed metering device in a vacuum planter based on EDEM. Trans. Chin. Soc. Agric. Mach. 2019, 50, 104–111. [Google Scholar]
- Wang, M.; Wang, W.; Yang, L.; Hou, M. Simulation of corn seed planting process based on EDEM and Fluent. Trans. Chin. Soc. Agric. Mach. 2018, 49, 64–71. [Google Scholar] [CrossRef]
- Li, J.; Zhang, Y.; Li, X.; Liu, H. Modeling and simulation of corn seed planting process based on EDEM and ANSYS. J. Mech. Eng. 2019, 55, 1–10. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, J.; Li, X.; Wang, Y.; Zhang, H. Design and analysis of a performance monitoring system for seed metering devices based on LED visible photoelectric sensing technology and a pulse width recognition algorithm. Sensors 2020, 20, 6898. [Google Scholar] [CrossRef]
- Liang, J.; Wang, J.; Liu, X.; Zhang, Y. Precision seeding parameter monitoring system based on visible light communication technology. Comput. Electron. Agric. 2021, 188, 106367. [Google Scholar] [CrossRef]
- Liang, J.; Wang, J.; Liu, X.; Zhang, Y. Optimized Design, Monitoring System Development and Performance Test of a Long-Belt Finger-Clip Precision Seed Metering Device for Corn. Sensors 2021, 21, 7879. [Google Scholar] [CrossRef]
- Yan, B.; Wu, G.; Fu, W.; Gao, N.; Meng, Z.; Zhu, P. Numerical simulation of corn seed planting process based on EDEM. Trans. Chin. Soc. Agric. Eng. 2020, 36, 1–9. [Google Scholar]
- Gu, F.; Zhao, Y.; Wu, F.; Hu, Z.; Shi, L. Simulation analysis and experimental validation of conveying device in uniform rushed straw throwing and seed-sowing Machines using CFD-DEM coupled approach. Comput. Electron. Agric. 2022, 193, 106720. [Google Scholar] [CrossRef]
- Han, D.; Zhang, D.; Jing, H.; Yang, L.; Cui, T.; Ding, Y.; Wang, Z.; Wang, Y.; Zhang, T. DEM-CFD coupling simulation and optimization of an inside-filling air-blowing maize precision seed-metering device. Comput. Electron. Agric. 2018, 150, 426–438. [Google Scholar] [CrossRef]
- Yang, L.; Chen, L.; Zhang, J.; Liu, H.; Sun, Z.; Sun, H.; Zheng, L. Fertilizer sowing simulation of a variable-rate fertilizer applicator based on EDEM. Procedia Eng. 2018, 211, 1029–1036. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | Minimal Value/mm | Maximum Value/mm | Mean Value/mm | Variance |
|---|---|---|---|---|
| Length | 9.89 | 12.08 | 11.564 | 0.133 |
| Width | 6.07 | 8.61 | 8.212 | 0.076 |
| Thickness | 4.01 | 5.98 | 4.23 | 0.017 |
| Project | Poisson’s Ratio | Shear Modulus/Pa | Density/g·cm−1 |
|---|---|---|---|
| Corn seed | 0.40 | 1.77 × 108 | 1.180 |
| ABS plastic | 0.50 | 1.37 × 108 | 1.197 |
| Rubber | 0.47 | 2.90 × 109 | 0.940 |
| Polyurethane | 0.42 | 3.77 × 107 | 1.650 |
| Project | Elastic Recovery Coefficient | Coefficient of Sliding Friction | Coefficient of Rolling Friction |
|---|---|---|---|
| Corn seed-corn seed | 0.182 | 0.431 | 0.0782 |
| Corn seed-ABS plastic | 0.621 | 0.482 | 0.0931 |
| Corn seed-rubber | 0.134 | 0.867 | 0.8143 |
| Corn seed-polyurethane | 0.122 | 0.468 | 0.0950 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, C.; Yi, S.; Tao, G.; Li, Y.; Wang, S.; Wang, G.; Gao, F. Research on Receiving Seeds Performance of Belt-Type High-Speed Corn Seed Guiding Device Based on Discrete Element Method. Agriculture 2023, 13, 1085. https://doi.org/10.3390/agriculture13051085
Ma C, Yi S, Tao G, Li Y, Wang S, Wang G, Gao F. Research on Receiving Seeds Performance of Belt-Type High-Speed Corn Seed Guiding Device Based on Discrete Element Method. Agriculture. 2023; 13(5):1085. https://doi.org/10.3390/agriculture13051085
Chicago/Turabian StyleMa, Chengcheng, Shujuan Yi, Guixiang Tao, Yifei Li, Song Wang, Guangyu Wang, and Feng Gao. 2023. "Research on Receiving Seeds Performance of Belt-Type High-Speed Corn Seed Guiding Device Based on Discrete Element Method" Agriculture 13, no. 5: 1085. https://doi.org/10.3390/agriculture13051085